





 Физика
Физика Механика
МеханикаПохожие презентации:






")



Кинематика
1.
Часть 2. КИНЕМАТИКАКинематика – раздел механики, в котором изучаются геометрические
свойства движения тел без учета их инерции и действующих на них
сил.
Основные задачи кинематики:
1. установить способ задания движения точки или тела как функцию
положения их в заданной системе координат в любой момент времени.
2. зная закон движения точки (тела), описать параметры движения
(перемещение, скорость, ускорение):
а) точки;
б) тела в целом и каждой точки тела в отдельности.
2.
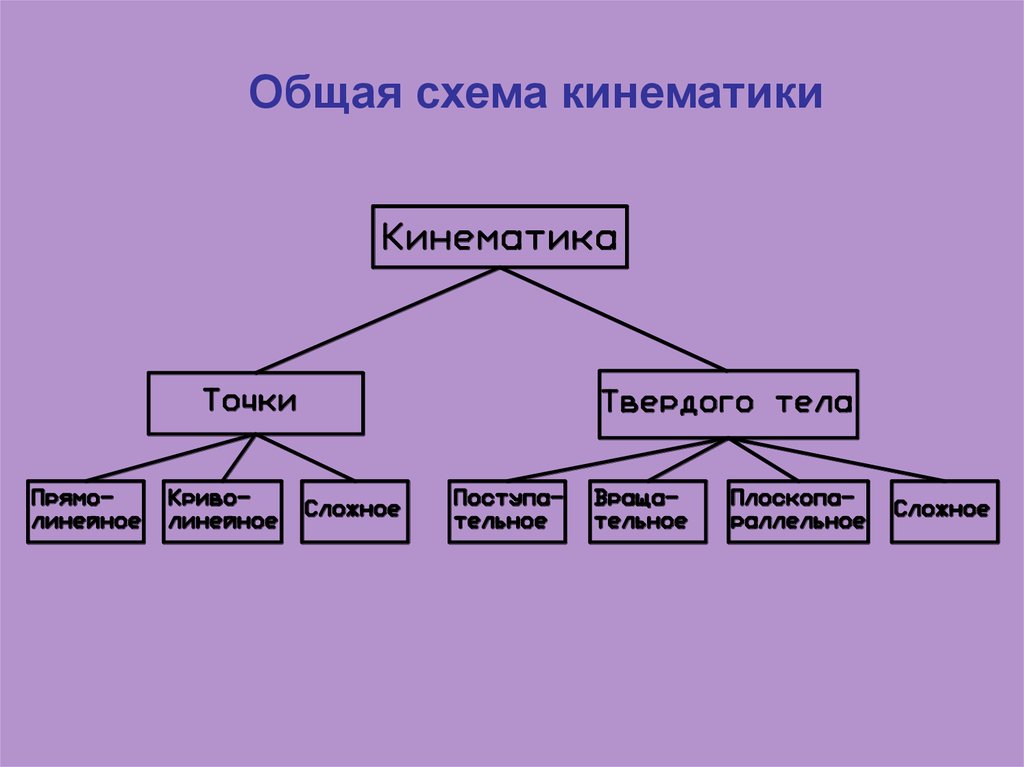
Общая схема кинематики3.
Виды движенияПрямолинейное
Характер движения
определяется
W
Криволинейное
Сложное
Поступатель
ное
Вращательное
Плоскопарал
-лельное
W, Wτ
Wк
W, Wτ
ε
W τ, ε
Wτ
1) W = 0 – движение равномерное,
2) W = const – равнопеременное движение,
А) const > 0 – равноускоренное,
Б) const < 0 – равнозамедленное,
3) W = var ( W 0,W c,W ) – неравномерное.
2.2 Кинематика точки
2.2.1 Способы задания движения точки.
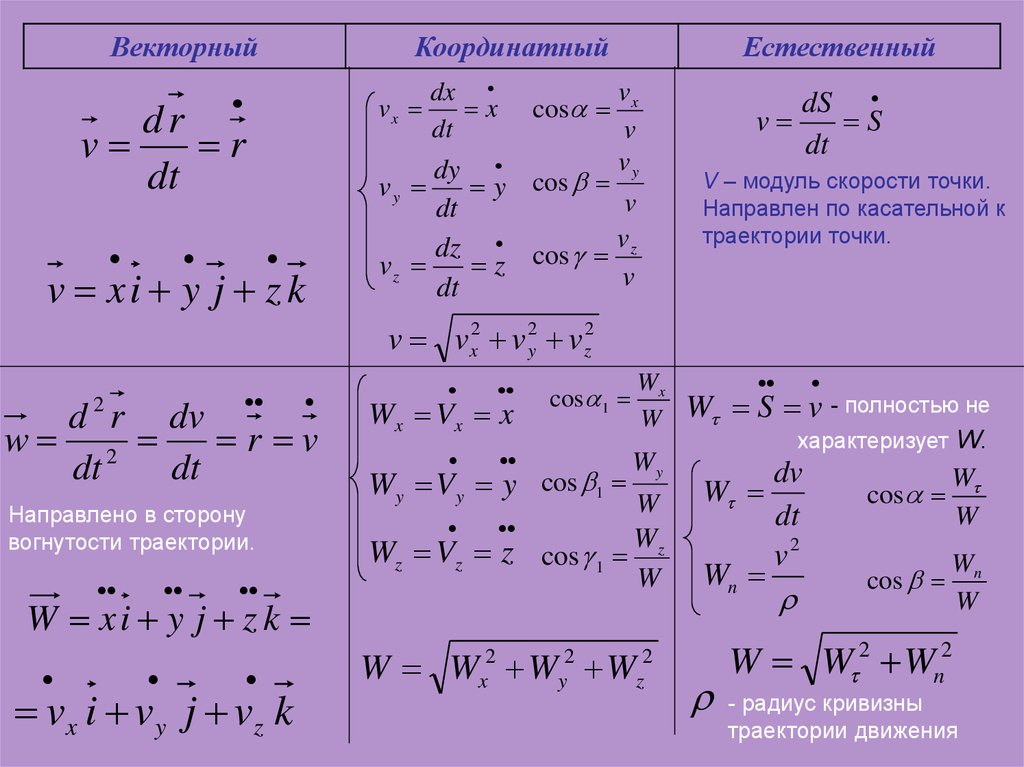
Векторный
r r (t )
r – радиусвектор
r f1 (t )i f 2 (t ) j f 3 (t )k
Более удобен при
доказательстве теорем и
выводе общих зависимостей
Координатный
х f1 (t )
y f 2 (t )
z f 3 (t )
t – выполняет
роль
параметра:
t = 0 – начало отсчета,
t = 1 – опред. направление
Часто используется на
практике при расчётах
Естественный
Должны быть известны:
1) уравнение траектории;
2) начало и направление
отсчета;
3) закон движения по
траектории S = S(t)
Нагляден, но не
известна траектория
движения точки.
4.
ВекторныйКоординатный
dx
vx
x
dt
dr
v
r
dt
v xi y j z k
cos
Естественный
vx
v
vy
dy cos
vy
y
v
dt
dz cos v z
vz
z
v
dt
dS
v
S
dt
V – модуль скорости точки.
Направлен по касательной к
траектории точки.
v v x2 v y2 v z2
d 2 r dv
w 2
r v
dt
dt
Направлено в сторону
вогнутости траектории.
Wx V x x
Wy Vy y cos 1
Wz Vz z
Wx
W
cos 1
Wy
W
W
cos 1 z
W
W xi y j z k
vx i v y j vz k
W W W W
2
x
2
y
2
z
W S v - полностью не
характеризует W.
dv
W
dt
v2
Wn
cos
W
W
cos
Wn
W
W W 2 Wn2
- радиус кривизны
траектории движения
5.
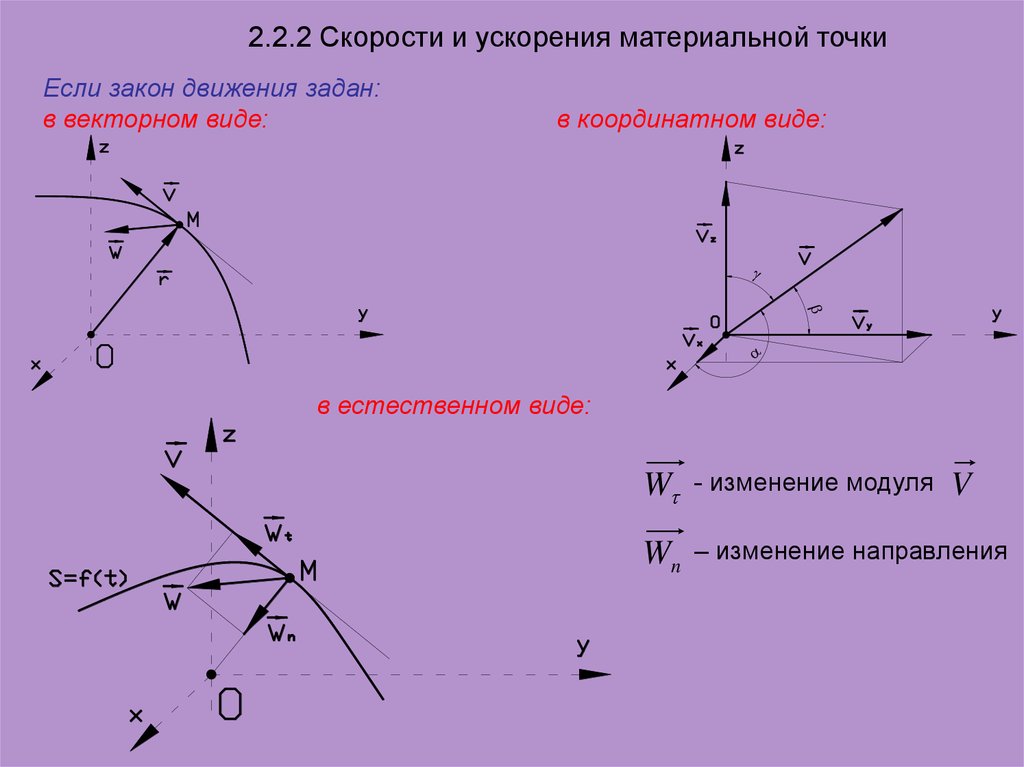
2.2.2 Скорости и ускорения материальной точкиЕсли закон движения задан:
в векторном виде:
в координатном виде:
в естественном виде:
W
- изменение модуля
Wn
– изменение направления
V
6.
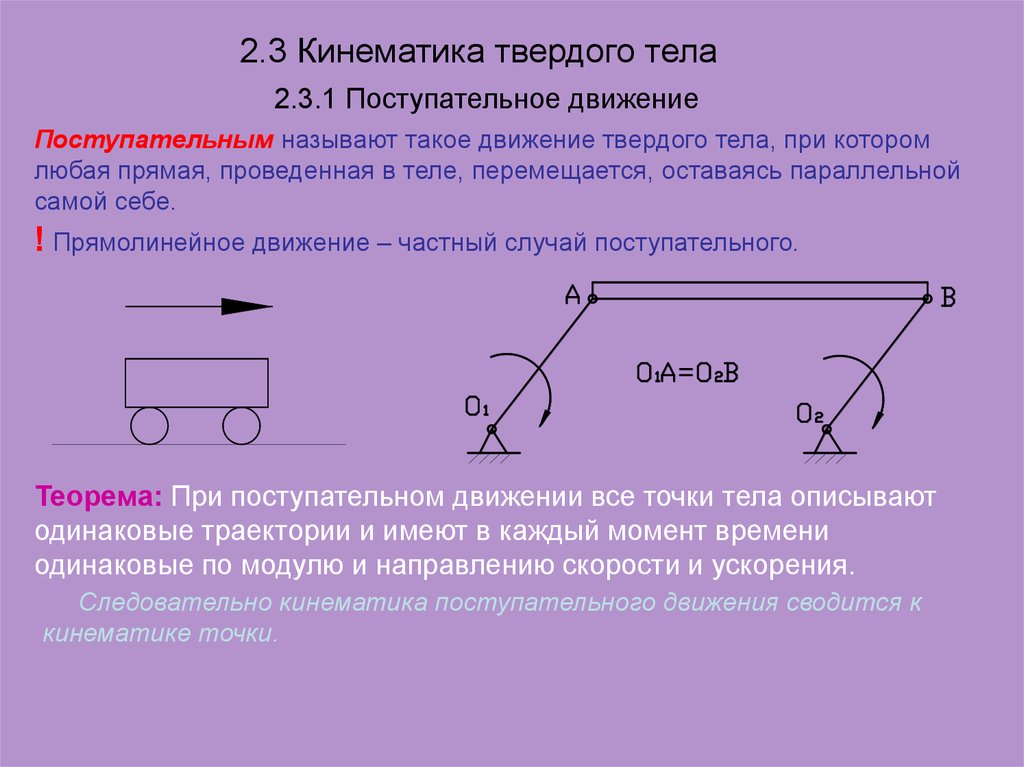
2.3 Кинематика твердого тела2.3.1 Поступательное движение
Поступательным называют такое движение твердого тела, при котором
любая прямая, проведенная в теле, перемещается, оставаясь параллельной
самой себе.
! Прямолинейное движение – частный случай поступательного.
Теорема: При поступательном движении все точки тела описывают
одинаковые траектории и имеют в каждый момент времени
одинаковые по модулю и направлению скорости и ускорения.
Следовательно кинематика поступательного движения сводится к
кинематике точки.
7.
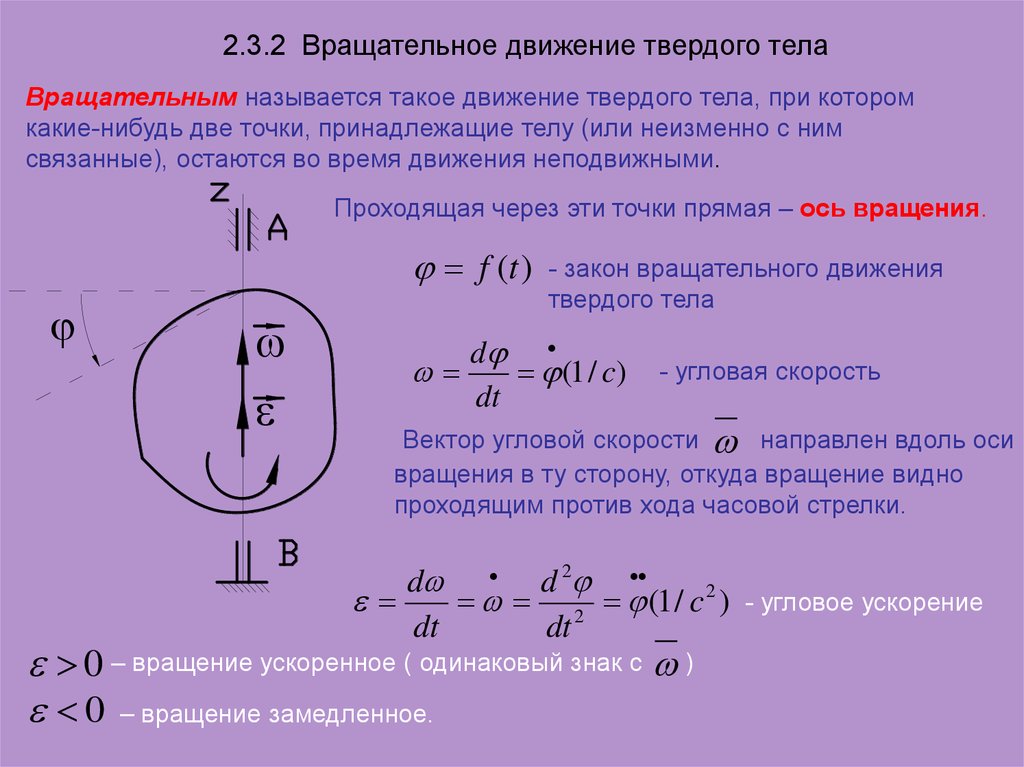
2.3.2 Вращательное движение твердого телаВращательным называется такое движение твердого тела, при котором
какие-нибудь две точки, принадлежащие телу (или неизменно с ним
связанные), остаются во время движения неподвижными.
Проходящая через эти точки прямая – ось вращения.
f (t )
- закон вращательного движения
твердого тела
d
(1 / c)
dt
- угловая скорость
Вектор угловой скорости направлен вдоль оси
вращения в ту сторону, откуда вращение видно
проходящим против хода часовой стрелки.
d d 2
2 (1 / c 2 )
dt
dt
0 – вращение ускоренное ( одинаковый знак с )
0 – вращение замедленное.
- угловое ускорение
8.
Равномерное и равнопеременное вращениеconst
- вращение называют равномерным.
Пусть при t = 0
0 , тогда t 0
Связь угловой скорости
const
- закон движения при
равномерном вращении.
(1 / c) и частоты оборотов n (об / мин) :
2 n n
60
30
- вращение называют равнопеременным
Пусть при t = 0
0 0
d dt ; 0 t
d 0 dt t dt ;
- закон изменения скорости при
равнопеременном вращении.
t2
0 t 0
2
- закон движения при
равнопеременном вращении.
9.
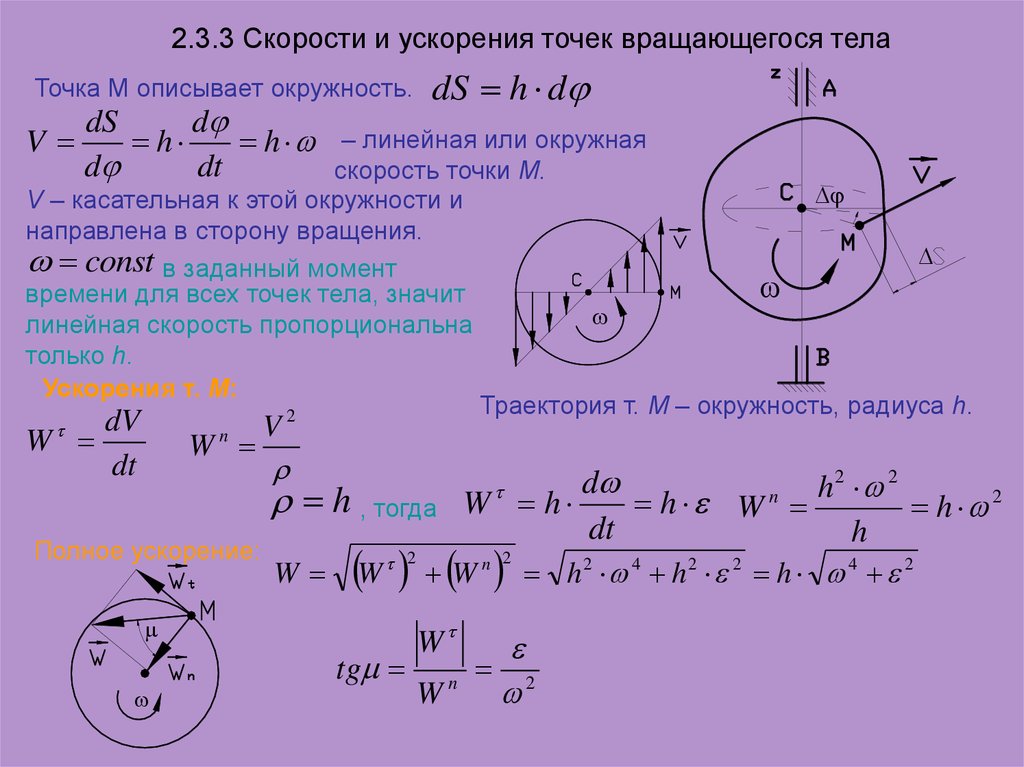
2.3.3 Скорости и ускорения точек вращающегося телаТочка М описывает окружность.
V
dS h d
dS
d
h
h – линейная или окружная
d
dt
скорость точки М.
V – касательная к этой окружности и
направлена в сторону вращения.
const в заданный момент
времени для всех точек тела, значит
линейная скорость пропорциональна
только h.
Ускорения т. М:
dV
W
dt
W
n
V
2
Траектория т. М – окружность, радиуса h.
2
2
d
h
h , тогда W h
h W n
h 2
dt
h
Полное ускорение:
2
2
W W W n h 2 4 h 2 2 h 4 2
W
tg n 2
W
10.
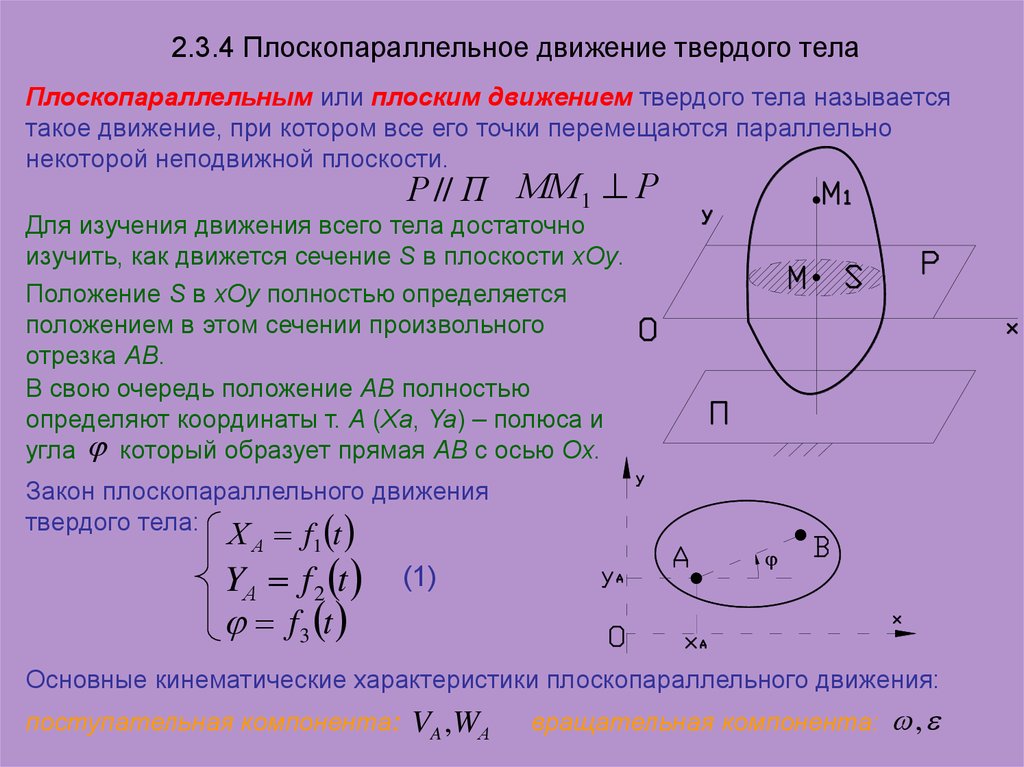
2.3.4 Плоскопараллельное движение твердого телаПлоскопараллельным или плоским движением твердого тела называется
такое движение, при котором все его точки перемещаются параллельно
некоторой неподвижной плоскости.
Р // П ММ1 Р
Для изучения движения всего тела достаточно
изучить, как движется сечение S в плоскости xOy.
Положение S в xOy полностью определяется
положением в этом сечении произвольного
отрезка АВ.
В свою очередь положение АВ полностью
определяют координаты т. А (Xa, Ya) – полюса и
угла который образует прямая АВ с осью Ох.
Закон плоскопараллельного движения
твердого тела:
Х А f1 t
YА f 2 t
f 3 t
(1)
Основные кинематические характеристики плоскопараллельного движения:
поступательная компонента:
VA ,WА
вращательная компонента:
,
11.
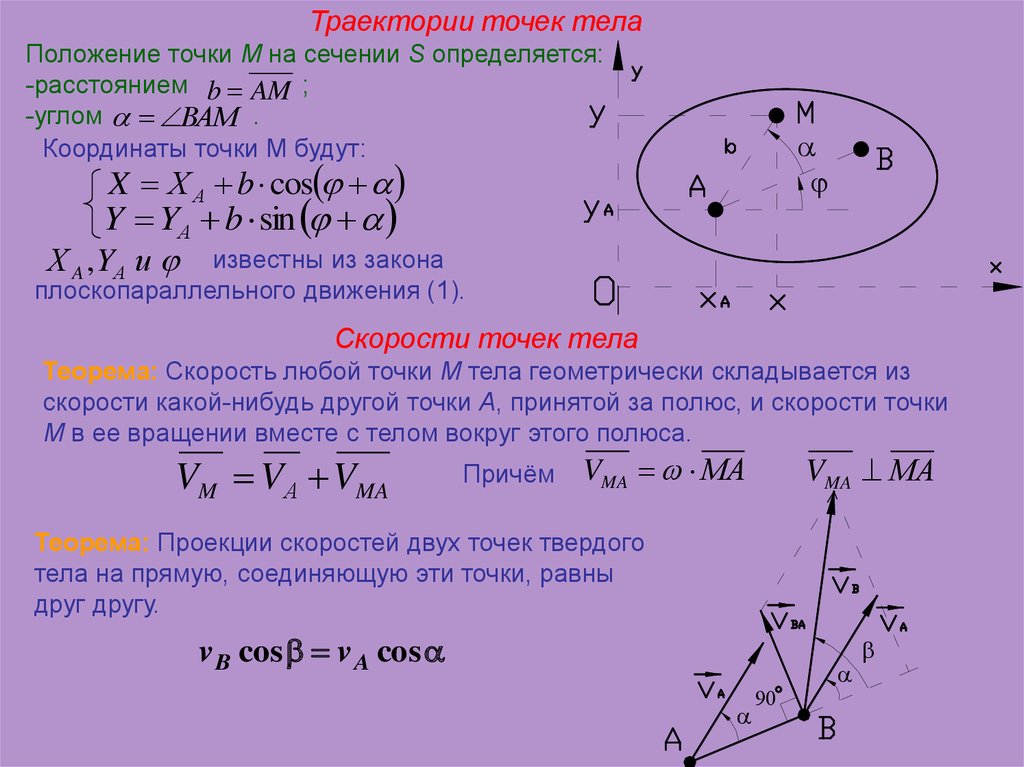
Траектории точек телаПоложение точки М на сечении S определяется:
-расстоянием b AM ;
-углом ВАМ .
Координаты точки М будут:
X Х А b cos
Y YА b sin
Х A , YА и известны из закона
плоскопараллельного движения (1).
Скорости точек тела
Теорема: Скорость любой точки М тела геометрически складывается из
скорости какой-нибудь другой точки А, принятой за полюс, и скорости точки
М в ее вращении вместе с телом вокруг этого полюса.
VM VА VMA
Причём
VMA МА
VMA МА
Теорема: Проекции скоростей двух точек твердого
тела на прямую, соединяющую эти точки, равны
друг другу.
v B cos v A cos
12.
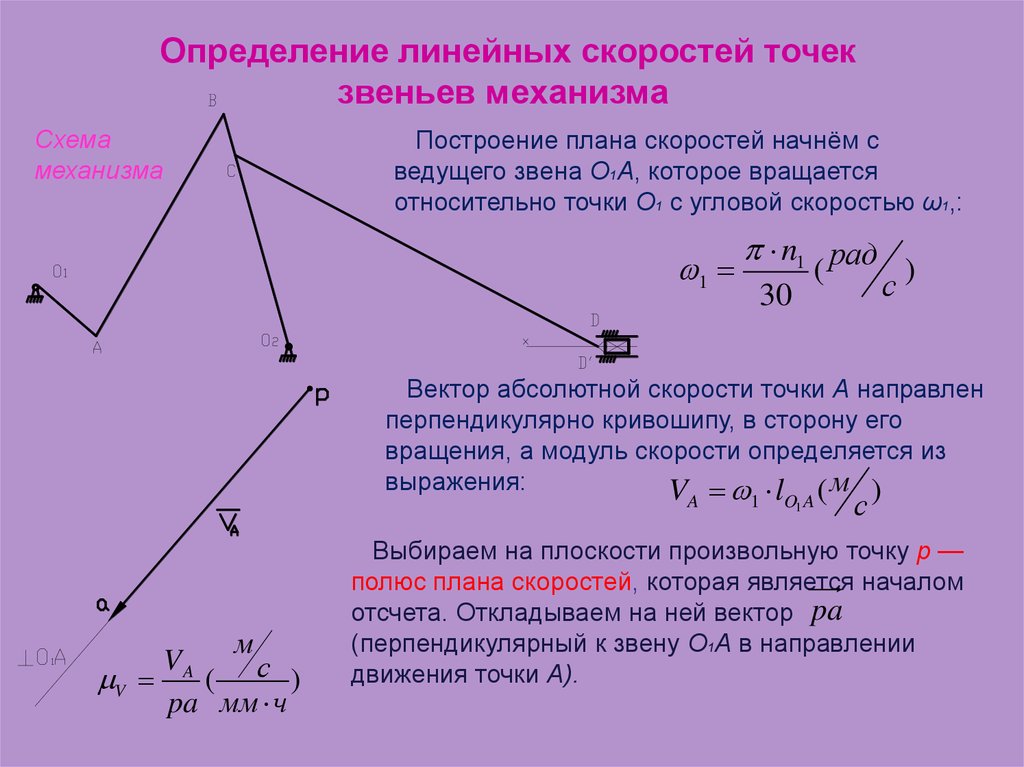
Определение линейных скоростей точекзвеньев механизма
Схема
механизма
Построение плана скоростей начнём с
ведущего звена О1А, которое вращается
относительно точки О1 с угловой скоростью ω1,:
n1 рад
1
(
)
с
30
Вектор абсолютной скорости точки А направлен
перпендикулярно кривошипу, в сторону его
вращения, а модуль скорости определяется из
выражения:
V l (м )
A
м
VA
V
( с )
pa мм ч
1
O1 A
с
Выбираем на плоскости произвольную точку р —
полюс плана скоростей, которая является началом
отсчета. Откладываем на ней вектор pa
(перпендикулярный к звену O1A в направлении
движения точки А).
13.
Схемамеханизма
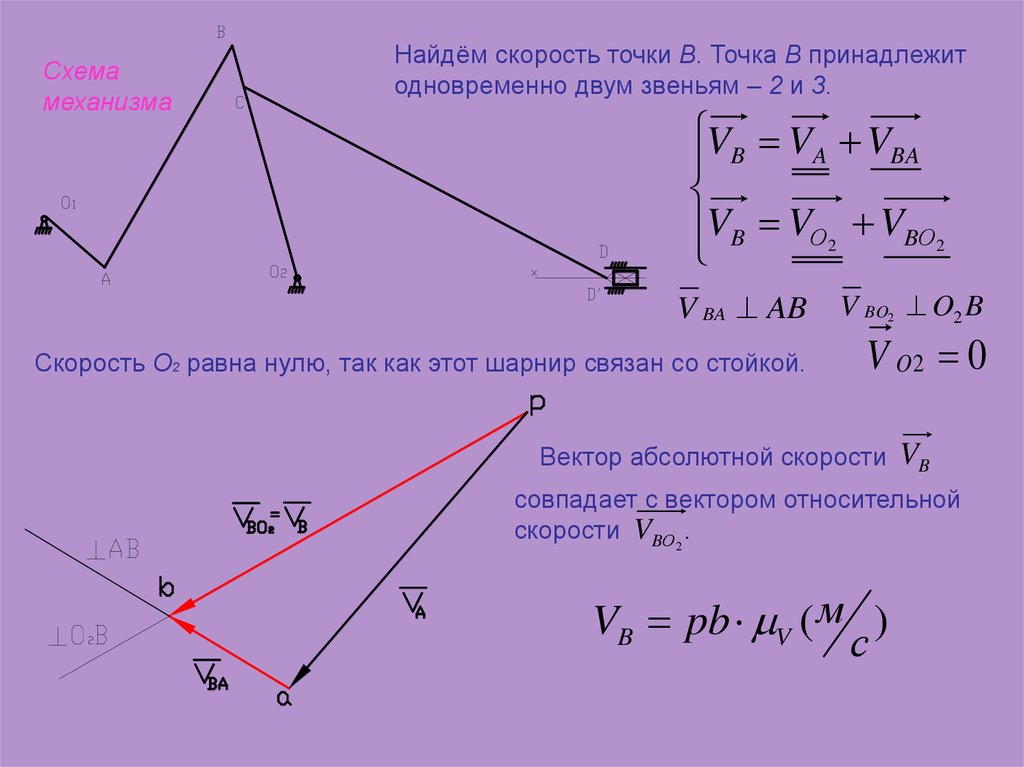
Найдём скорость точки В. Точка В принадлежит
одновременно двум звеньям – 2 и 3.
VB VA VBA
VB VО2 VBО2
V BA AB
Скорость О2 равна нулю, так как этот шарнир связан со стойкой.
V BO2 O2 B
V O2 0
Вектор абсолютной скорости
VB
совпадает с вектором относительной
скорости VBО2 .
VB pb V ( м )
с
14.
Схемамеханизма
Величину рс находим из пропорции:
рс
lСO2
рb
lBO2
VC pc V ( м )
с
Система уравнений для скорости точки D
будет иметь следующий вид:
VD VC VDC
VD VD VDD
VD pd V ( м / c)
V DC DC
V DD' // x
V D' 0
15.
Мгновенным центром скоростей (МЦС) называется точка сечения S тела,скорость которой в данный момент времени равна нулю.
B
По теореме о проекциях скоростей точек на направление
соединяющего их отрезка вектор скорости точки Р должен
быть либо перпендикулярен одновременно к отрезкам АР
и ВР (что невозможно), либо равен нулю.
vA
vB
A
P
Теорема: Скорость любой точки тела, лежащей в сечении S, равна ее
Рис. 2.20
вращательной скорости вокруг мгновенного центра скоростей.
v A vB
PA PB
Следствия из теоремы:
1. Для нахождения МЦС надо знать только направления скоростей каких-либо
двух точек Vа и Vв сечения тела (или траектории этих точек).
2. Для определения скорости любой точки тела надо знать модуль и
направление какой-либо точки А тела и направление скорости другой его
точки В.
3. Угловая скорость тела равна в каждый момент времени отношению
VB
скорости какой-либо точки сечения S и ее расстоянию от МЦС:
pb
!
МЦС в каждый момент времени – это вращение тела (и его сечения) вокруг
точки р , поэтому МЦС иногда называют мгновенным центром вращения (МЦВ).
16.
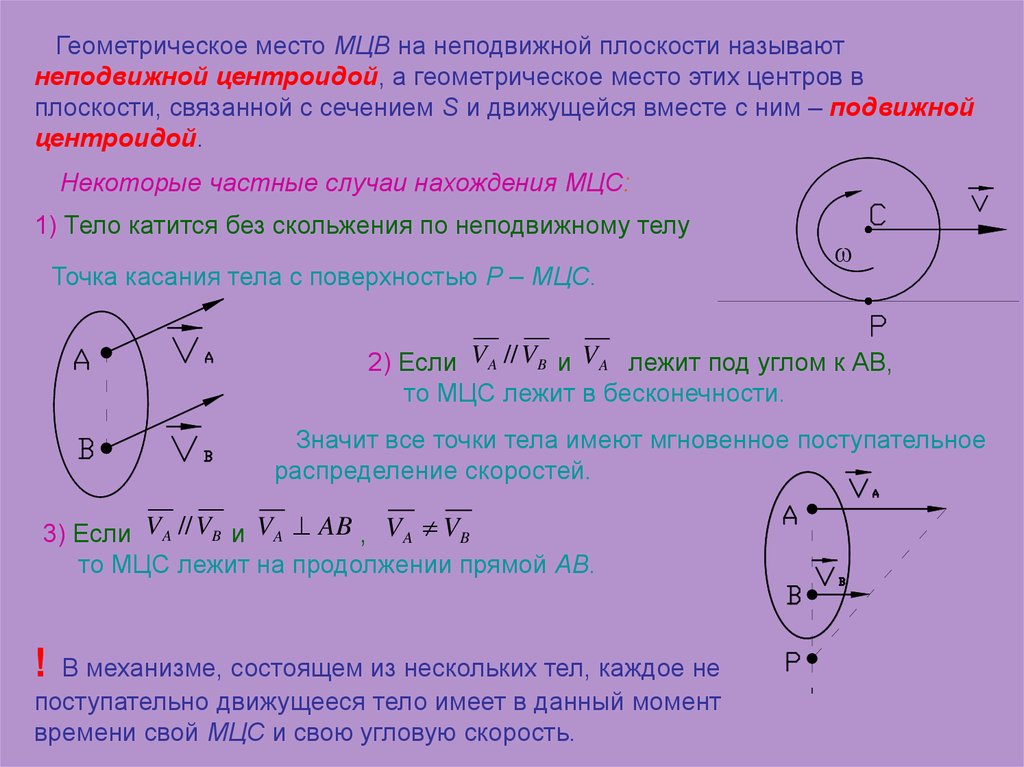
Геометрическое место МЦВ на неподвижной плоскости называютнеподвижной центроидой, а геометрическое место этих центров в
плоскости, связанной с сечением S и движущейся вместе с ним – подвижной
центроидой.
Некоторые частные случаи нахождения МЦС:
1) Тело катится без скольжения по неподвижному телу
Точка касания тела с поверхностью Р – МЦС.
2) Если V A // VB и V A лежит под углом к АВ,
то МЦС лежит в бесконечности.
Значит все точки тела имеют мгновенное поступательное
распределение скоростей.
3) Если V A // VB и VA AB , V A VB
то МЦС лежит на продолжении прямой АВ.
!
В механизме, состоящем из нескольких тел, каждое не
поступательно движущееся тело имеет в данный момент
времени свой МЦС и свою угловую скорость.
17.
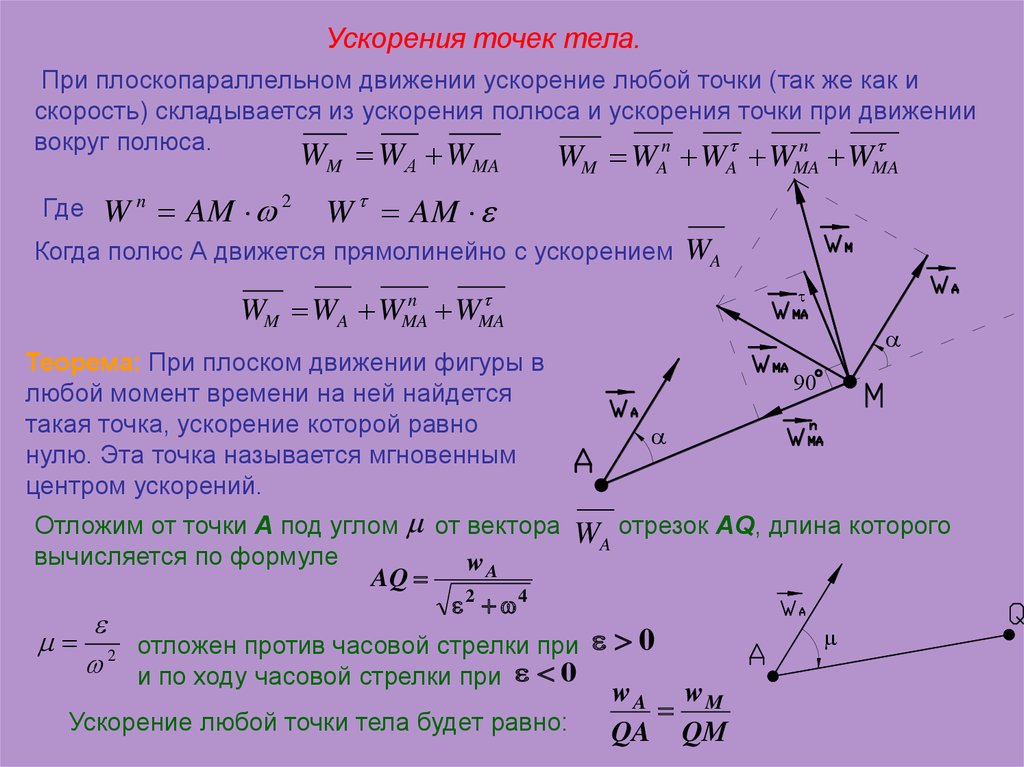
Ускорения точек тела.При плоскопараллельном движении ускорение любой точки (так же как и
скорость) складывается из ускорения полюса и ускорения точки при движении
вокруг полюса.
n
n
WM WА WMA
Где
W n AM 2
WM WA WA WMA WMA
W AM
Когда полюс А движется прямолинейно с ускорением WA
n
WM WA WMA
WMA
Теорема: При плоском движении фигуры в
любой момент времени на ней найдется
такая точка, ускорение которой равно
нулю. Эта точка называется мгновенным
центром ускорений.
Отложим от точки А под углом от вектора
вычисляется по формуле
wA
AQ
2 4
WA отрезок AQ, длина которого
0
2 отложен против часовой стрелки при
и по ходу часовой стрелки при 0
Ускорение любой точки тела будет равно:
w A wM
QA QМ
18.
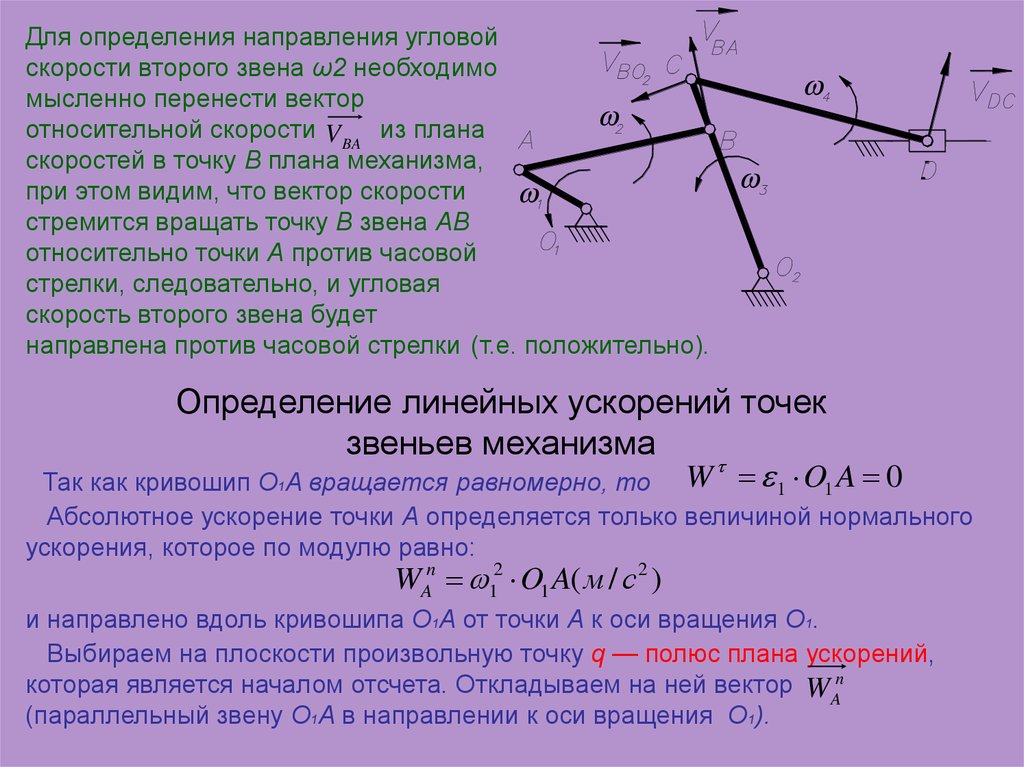
Для определения направления угловойскорости второго звена ω2 необходимо
мысленно перенести вектор
относительной скорости V BA из плана
скоростей в точку В плана механизма,
при этом видим, что вектор скорости
стремится вращать точку В звена АВ
относительно точки А против часовой
стрелки, следовательно, и угловая
скорость второго звена будет
направлена против часовой стрелки (т.е. положительно).
Определение линейных ускорений точек
звеньев механизма
Так как кривошип O A вращается равномерно, то W 1 O1 A 0
1
Абсолютное ускорение точки А определяется только величиной нормального
ускорения, которое по модулю равно:
WAn 12 O1 A( м / с 2 )
и направлено вдоль кривошипа O1A от точки А к оси вращения О1.
Выбираем на плоскости произвольную точку q — полюс плана ускорений,
которая является началом отсчета. Откладываем на ней вектор W An
(параллельный звену O1A в направлении к оси вращения O1).
19.
Масштабный коэффициентплана ускорений:
Схема механизма
WA м / с 2
W
(
)
qa мм ч
Определим
ускорение точки В.
W W W
B
A
BA
WB WO2 WBO2
Т.к. точка В движется криволинейно, то относительные
ускорения представим в виде суммы двух ускорений:
нормального и тангенциального.
2
W W W n W
A
BA
BA
B
n
W
WB WO2 WBO
BO2
2
n
WBA
n
WBO
2
WB qb W ( м / с 2 )
VBA
( м / с2 )
lBA
2
VBO
2
lBO2
( м / с2 )
20.
Для определения ускорения точки Cвоспользуемся свойством подобия:
qс
qb
lСO2 lBO2
WС qс W ( м / с 2 )
Система уравнений для ускорения точки D
будет имеет вид: W W W
D
C
DC
WD WD WDD
Относительное ускорение WDC представим в
виде суммы двух составляющих — нормальной
и тангенциальной
n
W WC WDC WDC
D
2
VDC
WD WC WDD
n
WDC
( м / с2 )
lCD
WD qd W ( м / с 2 )
Абсолютная величина углового ускорения может
быть получена через тангенциальное ускорение:
W
2 BA
l AB
3
WBО
2
lBО2
WDC
4
( рад / с 2 )
lCD
21.
2.3.5 Сложное движение точкиСложное движение точки – это движение, рассматриваемое одновременно
по отношению к двум системам отсчета, когда одна считается условно
неподвижной, а другая определенным образом движется по отношению к
первой.
Движение, совершенное точкой М по отношению к подвижным осям
координат, называется относительным движением. Скорость и ускорение
этого движения называют относительной скоростью и относительным
ускорением ( Vr и Wr ).
Движение, совершаемое подвижной системой отсчета со всеми точками
связанного с ней пространства по отношению к неподвижной системе,
является для точки М переносным движением. Скорость и ускорение этого
движения называют переносной скоростью и переносным ускорением ( V , W )
e
e
Абсолютная скорость точки равна геометрической сумме переносной и
относительной скоростей:
V V V
a
e
r
Теорема Кориолиса: в случае непоступательного переносного движения
абсолютное ускорение точки равно векторной сумме переносного,
относительного и кориолисового ускорений.
Wa We Wr Wk
Где Wk 2 e Vr 2 e Vr sin
- угол между векторами e и Vr