




 и шихтованный лист (верхний рисунок слева), а) беличья клетка, б) сердечник")













 Механика
Механика Электроника
ЭлектроникаПохожие презентации:




")





Устройство и принцип действия асинхронной машины. (Лекция 2)
1. Асинхронные машины
Элементы конструкцииУстройство и принцип действия
Понятие «скольжение»
Уравнение моментов
Приведение параметров ротора к
параметрам статора
Уравнения, схема замещения
Векторная диаграмма
Энергетическая диаграмма
2. Устройство и принцип действия асинхронной машины
Асинхронной машиной называют двухобмоточнуюэлектрическую машину переменного тока, у которой
только одна (первичная) получает питание от сети с
частотой f1, а вторую обмотку (вторичную) замыкают
накоротко или на сопротивления. Токи во вторичной
обмотке появляются в результате индукции. Их
частота f2 является функцией частоты вращения
ротора.
Первичную обмотку располагают в пазах сердечника
статора – на неподвижной части, вторичную – в пазах
ротора – на подвижной части.
В зависимости от вида обмотки ротора различают
машину с короткозамкнутым ротором и машину с
фазным ротором ( с контактными кольцами).
3.
Общий вид двигателя с фазным ротором( с контактными кольцами)4. Конструкция АД С короткозамкнутым ротором
5. Конструкция к.з. и фазного роторов
6. Элементы конструкции: сердечник статора (верхний рисунок справа) и шихтованный лист (верхний рисунок слева), а) беличья клетка, б) сердечник
Элементы конструкции: сердечник статора (верхнийрисунок справа) и шихтованный лист (верхний
рисунок слева), а) беличья клетка, б) сердечник ротора
с вентиляционными лопатками 4, в)сердечник ротора
со стержнями и к.з. кольцами 2.
7. Конструкция пазов ротора и статора
Пазы ротора: а)всыпнаяоднослойная укладка
обмотки, б) двухслойная
укладка обмотки
Пазы статора с
двухслойной
обмоткой :
а) открытый паз,
б) полузакрытый паз
8.
Принцип действия асинхронной машиныСтаторную обмотку подключают к сети переменного
тока. По ней под действием переменного напряжения
протекает переменный трёхфазный ток , который создаёт
МДС и вращающееся магнитное поле (ВМП).
ВМП сцепляется как с обмоткой статора, так и с
обмоткой ротора и наводит в них ЭДС.
При этом ЭДС обмотки статора, являясь ЭДС
самоиндукции, действует встречно приложенному к
обмотке напряжению и ограничивает величину тока в
обмотке статора.
А в обмотке ротора, цепь которой всегда замкнута, ЭДС
ротора наводит в стержнях ротора токи.
В проводниках наводится ЭДС
eпр= Blvотн
9.
Токи ротора, взаимодействуя с ВМП статора,вызовут появление электромагнитной силы,
действующей на проводники, и электромагнитного
момента как произведения этой силы на плечо (радиус
сердечника ротора) и на количество проводников.
Поле статора вращается всегда со скоростью
n1= 60f1/p об/мин независимо от нагрузки.
Ротор под действием электромагнитного момента
вращается со скоростью n2 < n1, отставая, «скользя»
относительно него. Это отставание называют
скольжением (s) (относительная разность скоростей):
s = (n1-n2)/n1 измеряют его в о.е. или в %
Отсюда скорость ротора : n2 = n1(1-s), частота тока в
роторе :
f2 = s·f1
При пуске: скорость ротора: n2= 0, скольжение: s =1;
При х.х.:
n2 ≈ n1, s ≈ 0; При ном. реж.: sном= 0,02.
10.
Рис. А. К принципу действияасинхронного двигателя
Вращающееся магнитное
поле пересекает
проводники обмотки
ротора и по закону
электромагнитной
индукции наводит
в них ЭДС Е2.
Направление ЭДС Е2
определяют по правилу
правой руки. Так как
Обмотка ротора
короткозамкнутая, в ней
возникает ток I2 (рис. А),
направление которого
определяют по правилу
левой руки.
11.
Уравнение равновесия моментов на валу ротораВ магнитном поле, создаваемом полюсами ВМП,
появляются проводники ротора с током I2. На них по закону
Ампера будет действовать сила, направление которой
определяют правилом левой руки. За счет пары сил F2
(рис. А) возникает вращающий момент М2П, уравнение:
М2П – М2С = J·ε,
(А),
где М2П – вращающий момент на валу двигателя при n2 = 0.
М2С – момент сопротивления, обусловленный наличием
рабочего механизма;
J·ε - динамический момент
J – момент инерции вращающихся масс
ε – угловое ускорение
Если М2П > М2С, то ротор придет во вращение, согласно
основному закону динамики вращающегося движения:
.
12.
nota bene!Основной закон динамики вращательного движения:
Произведение момента инерции на
угловое ускорение равно
результирующему моменту сил,
действующих на материальную
точку.
13.
Так как для реального объекта момент инерциивращающихся масс J = const, то из выражения (А) следует,
что ε > 0.
Вывод. Ротор приходит во вращение в направлении,
которое совпадает с направлением вращающегося
магнитного поля.
Допустим, что n1 = n2 , т. е. скорость ВМП равна скорости
ротора, тогда ВМП не пересекает проводники обмотки
ротора. Значит Е2 = 0, I2 = 0, F2 = 0, M2 = 0,
т.е. ротор не вращается!!!.
Вывод. Для нормальной работы асинхронного двигателя
необходимо выполнение условия n1 ≠ n2 . Данное
неравенство характеризуется специальной величиной,
которую обозначают S и называют скольжением.
14. Режимы работы и области применения асинхронных машин
0 ≤ s ≤ 1 – двигательный режим,-∞<s ≤ 0 - генераторный режим,
+∞>S ≥ 1
- режим электромагнитного тормоза.
15.
Приведение параметров роторной цепи к параметрамстаторной цепи. Уравнения асинхронной машины.
1.Цель приведения – упрощение анализа процессов
2.Приём приведения: принимают, что
w1 w 2
Находят действующие значения ЭДС и коэффициент
приведения (трансформации) ЭДС КЕ:
E1 2 f1 w1 m k обм1
E 2 2 f 2 w 2 m k обм 2
E1 w1 k обм1
kE
, E1 E 2 E 2 k E
E 2 w 2 k обм 2
Здесь - kЕ коэффициент приведения (трансформации) ЭДС
16.
3.Условие приведения – соблюдение закона сохраненияэнергии.
Первое уравнение (основное) для асинхронных машин
(уравнение равновесия напряжений на обмотке статора):
Ú1= - Ė1+Í0Z1,
где Í0Z1=Í0·r1+j·Í0·x1
- падение напряжения на активном сопротивлении r1 и на
путях рассеяния потока jx1
17.
Из условия равенства мощностей реального и приведённогоротора найдём коэф. приведения для тока ротора
m2·I2·E2= m1·I′2·E′2
kI:
I′2=m2·E2·I2 / m1·E′2=m2·w2·kобм2·I2 / m1·w1·kобм1=I2/kI
I′2 = I2/kI
kI= m1·w1·kобм1 / m2·w2·kобм2
Приведение сопротивления цепи ротора к сопротивлению
цепи статора. Из равенства электрических потерь до и после
приведения: m ·(I )2·r = m (I′ )2·r′
2
2
2
1
2
2
получим приведённое активное сопротивление ротора
r′2=r2·m2 /m1(I2 /I′2)2=r2·ki·kЕ;
r′2=r2·ki·kЕ;
kЕ= w1·kобм1 / w2·kобм2
18.
Из равенства относительных реактивных паденийнапряжений получим приведённое индуктивное
сопротивление ротора X′2:
I2·X2 / E2 = I′2·X′2 / E′2 откуда найдём:
X′2= (E′2/E2)·(I2 / I′2)·X2=kA·X2
X′2= kA·X2
KA = ke·ki
коэффициент приведения
сопротивлений
k
При определении коэффициента
A
для короткозамкнутого ротора принимают
w 2 0.5; m 2 Z 2 ; k обм2 1
19. Основные уравнения и схема замещения асинхронной машины
Запишем выражениедля тока I1:
I1 = I0 +(- I′2)
20.
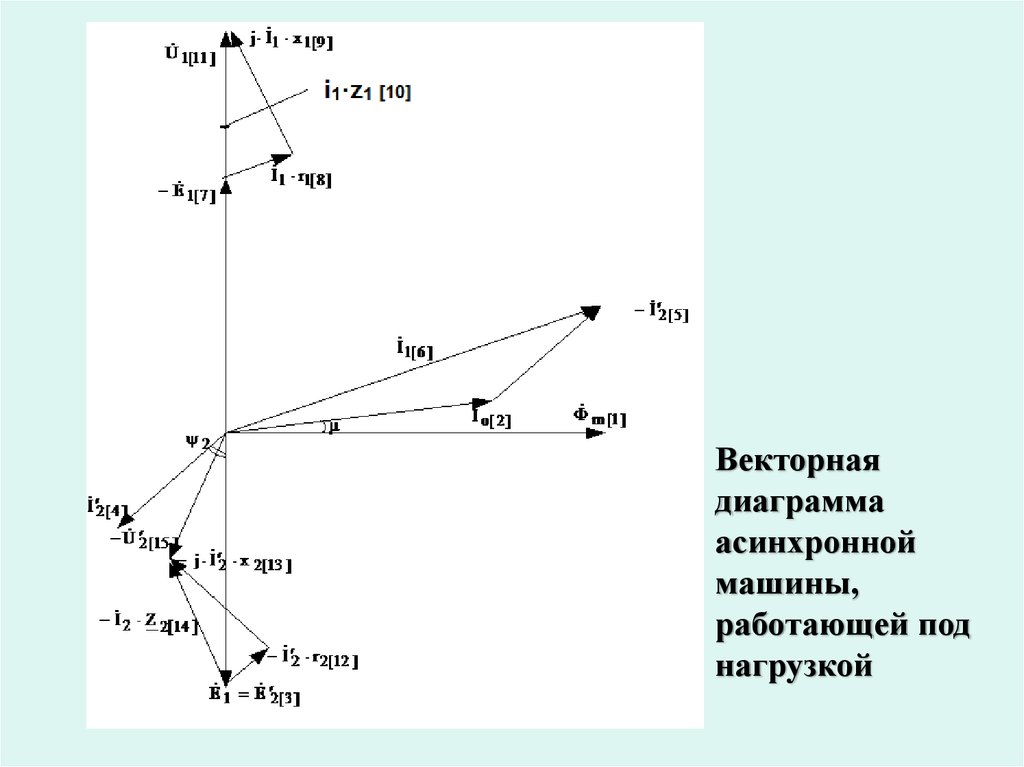
Векторнаядиаграмма
асинхронной
машины,
работающей под
нагрузкой
21.
Векторная диаграмма асинхронной машины работающейпод нагрузкой.
На рисунке обозначено:
рабочий поток (создаёт ЭДС, отстающую от него.
m
на 900)
I
ток холостого хода
o
угол магнитного запаздывания
E
1
ЭДС в обмотке статора,
E
2
ЭДС в обмотке ротора
I
2
- ток
в роторе
I
1
I
1
- ток
в статоре
Номера в скобочках индексов – последовательность
построения векторов с 1 по 15 вектор
22.
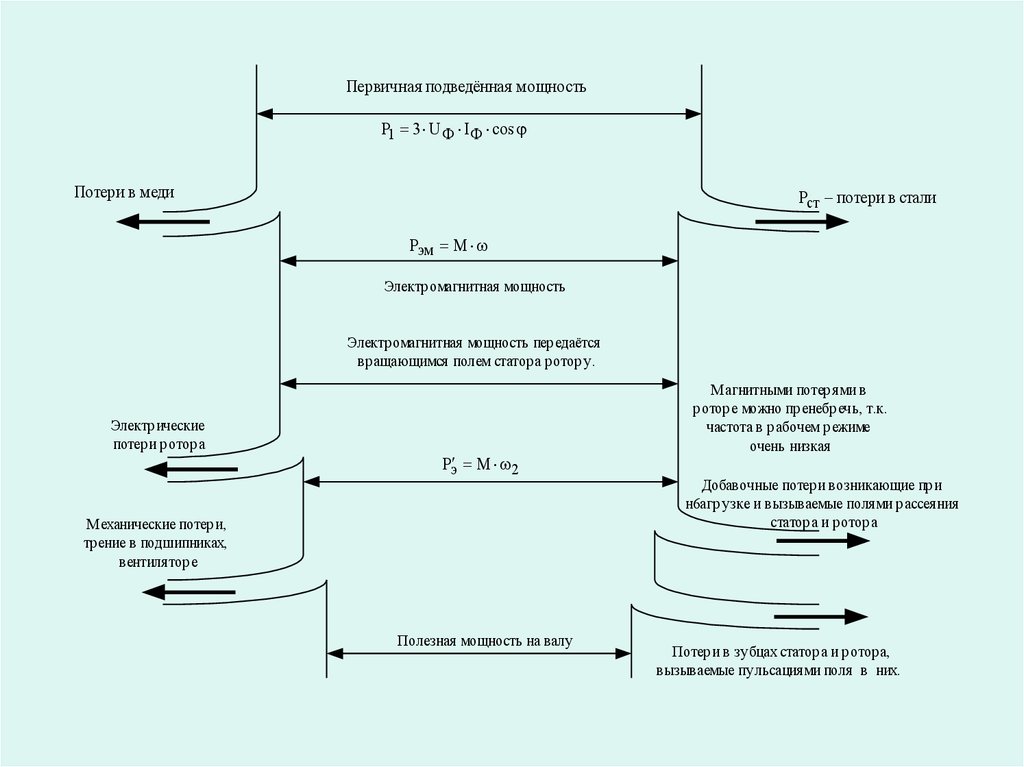
Энергетическая диаграмма асинхронной машины1
P2
P1
где P2 – полезная (отдаваемая мощность);
P1 – затрачиваемая (потребляемая
мощность):
P 3U I cos
1
Pm1 m1 I r1
2
1
(1,3 1,5)
1
2
1
2
2
Pc1 f
pm 2 m I r
ф
ф
потери в обмотке статора (потери в меди)
потери в стали статора
потери в обмотке ротора (потери в меди)
23.
pc2 - пренебрегаем, т.к. f 2 S f1 1,5 ГцPмх – механическая мощность, развиваемая ротором.
pдоб и pмех – добавочные и механические потери.
Угловая частота вращения.
1 2 n1
2 f 1
p
1
p
Pэм 1 M
2 1 (1 S )
(1)
Pмх 2 M
(3)
(4)
Pмх 1 M (1 S ) Pэм (1 S )
(6)
Pмх Pэм pM 2
Подставим (2) в (4).
Приравняем (5) к (6).
pM 2 S Pэм
(2)
(7)
(5)
Вывод:
потери в роторе тем больше, чем больше скольжение.
Следовательно, с увеличением скольжения уменьшается
КПД и ухудшается охлаждение.
24.
Первичная подведённая мощностьP1 3 U I cos
Потери в меди
Pст потери в стали
Pэм M
Электромагнитная мощность
Электромагнитная мощность передаётся
вращающимся полем статора ротору.
Электрические
потери ротора
Pэ M 2
Механические потери,
трение в подшипниках,
вентиляторе
Полезная мощность на валу
Магнитными потерями в
роторе можно пренебречь, т.к.
частота в рабочем режиме
очень низкая
Добавочные потери возникающие при
н6агрузке и вызываемые полями рассеяния
статора и ротора
Потери в зубцах статора и ротора,
вызываемые пульсациями поля в них.
25. Обмотка статора, распределение , укорочение
Начала и концы фаз должны иметь стандартное обозначениеПо ГОСТ 183-74 (до 1987г.)
Обмотка статора
С1 С4
C2 C5
С3 С6
Обмотка ротора
Р1 Р2 Р3
По ГОСТ 26772-85 (с 1987г.)
U1 U2
V1 V2
W1 W2
K1 K2
L1
L2
M1 M2
K L M
Q звезда