






 Медицина
Медицина Электроника
ЭлектроникаПохожие презентации:










Модуль управления стереотаксическим манипулятором
1. Модуль управления стереотаксическим манипулятором
Харьковский национальный университетрадиоэлектроники
Кафедра БМИ
Модуль управления
стереотаксическим манипулятором
Автор: ст. гр. РЕАз-11-1 Остроголов Е.А.
Руководитель: ассистент Тимкович М.Ю.
2.
• Цель работы: разработать модуль управлениястереотаксическим манипулятором
• Задачи работы:
• провести анализ нейрохиругических систем;
• разработать структурную схему модуля
управления стереотаксическим манипулятором
• разработать принципиальную схему модуля
управления стереотаксическим манипулятором
• разработать алгоритм управления
стереотаксическим манипулятором.
• Сформировать основніе медико-технические
требования к модулям управления
стереотакическими манипуляторами
3.
Рисунок1. – Томограммы при проведении стереотаксической операции
4.
МикроконтроллерИнтерфейсное
устройство
обмена
данными
Персональный
компьютер
Источник
питания
Драйвер
шагового
двигателя 1
Драйвер
шагового
двигателя 2
Драйвер
шагового
двигателя 3
Шаговый
двигатель 1
Шаговый
двигатель 2
Шаговый
двигатель 3
Рисунок 2. – Структурная схема модуля
управления стереотаксическим манипулятором
5.
DD111
12
2
3
13
4
14
5
15
16
6
27
17
28
22
20
21
22
PE0
PE1
PE2
PE3
PE4
RxD1
RES
VCC
GND
XTAL1
XTAL2
10
11
1
2
12
3
1
17
2
18
13
4
3
19
14
35
5 26
6
4
7
27
8
9 5
20
10 23
18
20
19
22
16
36
37
38
39
23
24
10
15
11
2
12
DIR
A
CLK
B
H/F
C
RES
D
E
INH1
UR
INH2
CON
SEN1
SEN2
OSC
30
VD17 VD19 VD21 VD23
DA3
DA1
PB0
PB1
PB2
PB3
PB4
PC0
PC1
PC2
PC3
PC4
CPU
30
VD1 VD5 VD9 VD13
4
5
6
7
7
10
9
12
5
6
8
11
14
1
13
15
R2
GND
A
SWM
B
O2
C
O3
D
O4
2
31 11
17
3
32 12
18
13
33 13
19
14
34 26
20
VD2 VD6 VD10 VD14
INH1
INH2
8
SEN2
27
15
11
22 25
16
20
2
40
12
C6
C4
R4
10
30 15
20
GND
4
VS
9
VSS
SEN1
14
VSS
DIR
A
CLK
B
H/F
C
RES
D
E
INH1
UR
INH2
CON
SEN1
SEN2
OSC
XS2
DA7
DA5
O1
4
5
6
7
7
10
9
12
5
6
8
11
14
1
13
15
R10 R11
GND
A
SWM
O1
B
O2
C
O3
D
O4
2
39
3
40 30
13
41 31
14
42 32
VD18 VD20 VD22 VD24 33
INH1
INH2
SEN1
SEN2
8
20
GND
4
VS
9
VSS
16
5
22
14
31
13
32
1
20
RxD
U1
U2
GND
6
21
7
20 6
U3
C1
R1
22
20
17
20
RxD
SW1
XS1
20
Цепь
1
GND
21
2
RxD
22
3
+5 B
28
4
+8 B
30
5
+36 B
31
32
Конт
6
+12 B
7
-12 B
30
C11
7
18
8
19
26
20
9
10
27
15
10
11
24
16
20
2
22
12
A
CLK
B
H/F
C
RES
D
E
INH1
UR
INH2
CON
SEN1
OSC
SEN2
5
4
6
7
7
10
9
12
5
6
8
11
14
1
13
15
R3
GND
R5
A
SWM
O1
B
O2
C
O3
D
O4
2
R12
3
36
13
37
14
38
VD4 VD8 VD12 VD16
INH1
INH2
SEN1
SEN2
R13
R7
C9
R6
C2
C8
22 29
2
3
DA6
1
26
28
18
+36 В
МОТ2.1
3
МОТ2.2
4
МОТ2.3
5
R8
ZQ1
19
C3
Рисунок 3 – Принципиальная схема модуля
управления стереотаксическим манипулятором
C10
+
C15
МОТ2.4
XS4
Конт
Цепь
22 30
1
+36 В
24 39
2
МОТ3.1
40
3
МОТ3.2
4
МОТ3.3
5
МОТ3.4
42
22
25
VSS
20
20
R14
Цепь
2
20 41
20
20
20
R9
29
22
МОТ1.4
36
22 37
C14
C7
5
20
30
C5
МОТ1.3
35
23 38
20 27
8
GND
4
VS
9
VSS
МОТ1.2
4
1
C13
35
3
XS3
30
20
DA4
DA2
DIR
МОТ1.1
Конт
C12
VD3 VD7 VD11 VD15
17
+36 В
2
22
VSS
20
34
Цепь
1
30
20
DD2
UTTL
Конт
20
6.
Рисунок 4. – Алгоритм управления микроконтроллером7.
Рисунок 5. – Проведение стереотаксических расчетов при формированииуправляющего воздействия на хирургический инструмент:
1 – стереотаксический апарат, 2 дистальная оконечность канюли
8.
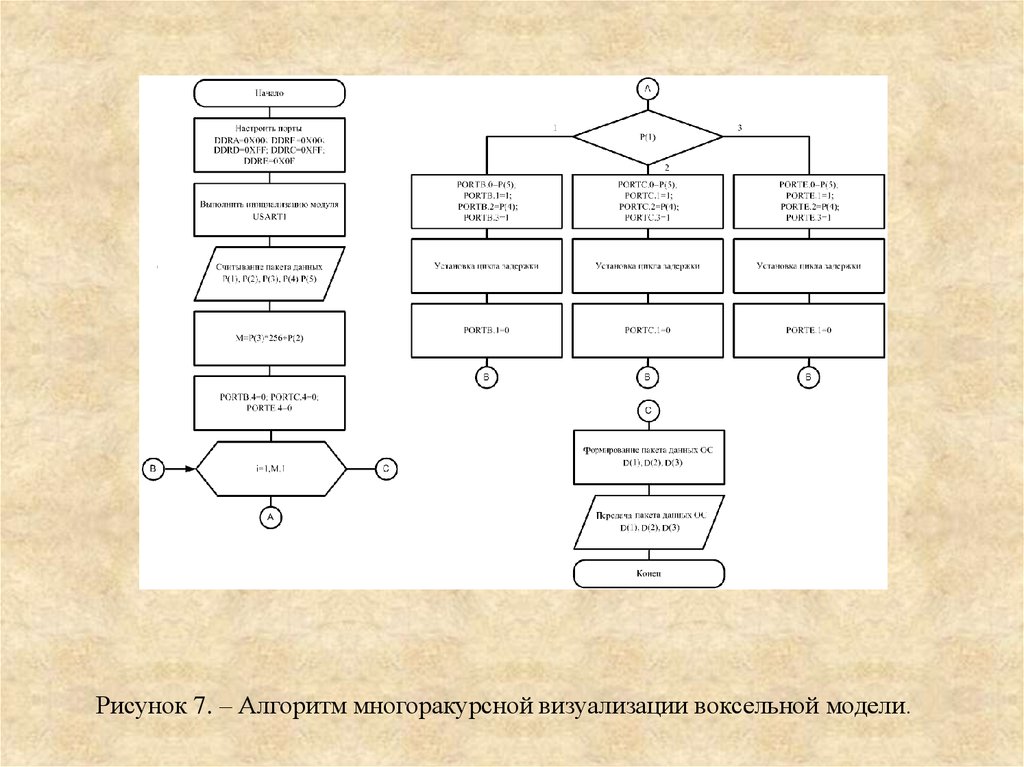
Рисунок 7. – Алгоритм многоракурсной визуализации воксельной модели.9.
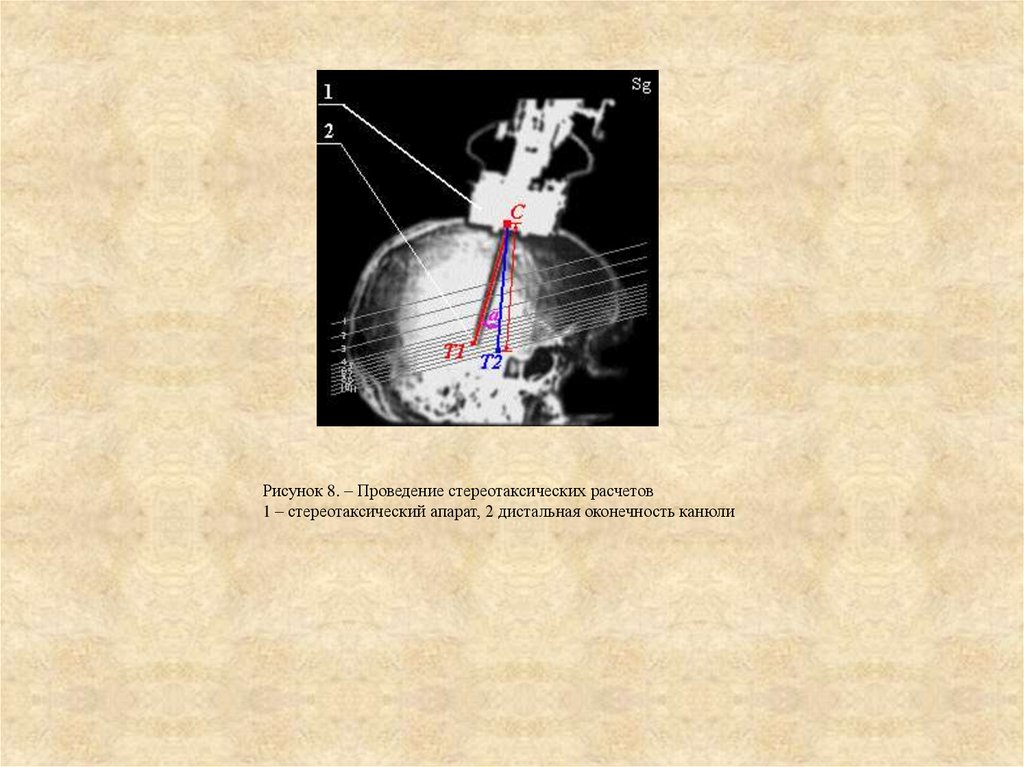
Рисунок 8. – Проведение стереотаксических расчетов1 – стереотаксический апарат, 2 дистальная оконечность канюли
10.
ВЫВОДЫ:В настоящее время в мире существует всего несколько систем для
автоматизированного проведения нейрохирургических операций,
поэтому разработка стереотаксических роботов-манипуляторов является
актуальной задачей.
На основе анализа существующих нейрохирургических роботовманипуляторов и возможностей их усовершенствования была предложена
схема автоматизации стереотаксического аппарата Канделя, конструкция
которого позволяет выполнить доступ к практически любой глубинной
структуре головного мозга человека.
Были разработаны структурная и принципиальные схемы модуля
управления стереотаксическим манипулятором, в котором реализованы
три степени свободы: одна поступательная и две угловые.
Система управления стереотаксическим манипулятором должна быть
построена по принципу децентрализованного управления. При этом
система операционного планирования должна формировать управляющие
воздействия и передавать их в микроконтроллер, который
непосредственно управляет шаговыми двигателями на уровне сигналов.
Алгоритм управляющего программного обеспечения стереотаксическим
манипулятором в микроконтроллере должен состоять из 2-х частей:
инициализационной и циклической, в которой выполняется прием
управляющих воздействий и их отработка, путем подачи сигналов
управления на драйвера шаговых двигателей.
Перспективой работы является дальнейшее совершенствование
спроектированного устройства и разработка подробной конструкторской
документации для проектирования стереотаксического манипулятора.