
































 Физика
ФизикаПохожие презентации:



")






Полигармонические колебания
1. Полигармонические колебания
Полигармоническими называют колебания, которые могут быть представлены в виде суммыдвух или более гармонических колебаний с частотами, находящимися в рациональном
соотношении.
u(t)=A1cos( 1t)+A2cos( 2t).
Существенно, чтобы отношение частот 1/ 2 было рациональным числом. Пусть 1 и 2
выражаются через некоторую частоту w так,что 1=nw и 2 =mw, где m и n целые числа, и
n/m несократимая дробь. Тогда сумма этих колебаний будет периодической функцией с
периодом 2 /w.
Ряд Фурье для периодического процесса
В общем случае периодические функции с периодом Т могут быть представлены в виде ряда:
1
u (t ) A0 Ak cos( k t k )
2
k 1
Где 1/2A0 - среднее значение колебания;
Ак и k- амплитуда и фаза к-й гармоники.
2. Другие характеристики колебательных процессов
•Пиковое значение и размах.A
max u(t ) ,
t T
T
•Осредненные характеристики
среднее значение и СКЗ:
uср.
A
min u(t ) ;
A A
t T
T
1
1
2
u
(
t
)
dt
,
u
(
u
(
t
))
dt .
ср . квад.
T0
T0
3. Колебания системы с одной степенью свободы
При изучении колебаний различных механических систем необходимо в зависимости отпоставленной задачи по возможности упрощать картину данного колебательного процесса т.е.
пользоваться моделями.
Fk kx,
Fc cx ,
ст
mg
k
- сила упругости
- сила трения
- статический прогиб
c
k
F
x x x ,
m
m
m
x 2 x 2 x f ,
c
k
;
.
2m
m
4.
Колебания системы с однойстепенью свободы
mw bv kx F (t )
b
k
1
w v x F (t )
m
m
m
1
w 2 v x F (t ), k
m
m
2
0
xст
xст
x
xст
2
2
1
1
0
2
1
1
1
5. АЧХ и ФЧХ системы с одной степенью свободы
6.
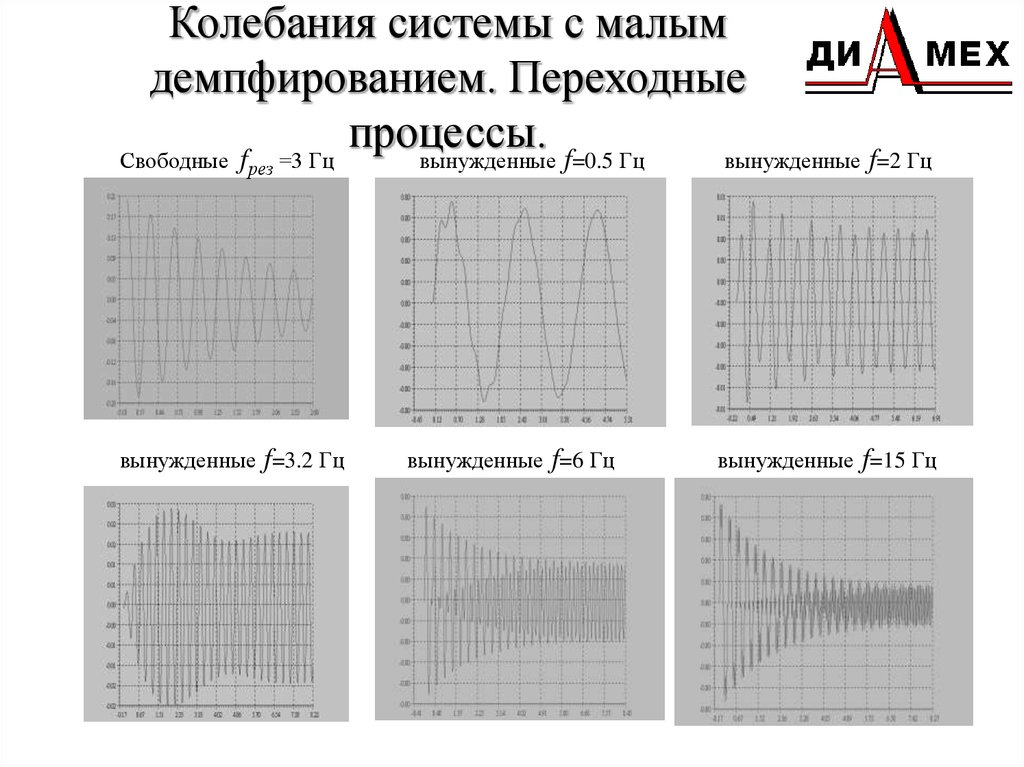
Колебания системы с малымдемпфированием. Переходные
процессы.
Свободные f =3 Гц
вынужденные f=0.5 Гц
вынужденные f=2 Гц
рез
вынужденные f=3.2 Гц
вынужденные f=6 Гц
вынужденные f=15 Гц
7. Колебания системы с двумя степенями свободы
m1 x 1 c1 x 1 c2 x 2 x 1 k1 x1 k2 x2 x1 F1m2 x 2 c2 x 2 x 1 k2 x2 x1 0
8. АЧХ системы с двумя степенями свободы
9. Колебания системы с одной степенью свободы
10. Идеология
( f )V
F (t )
( f )
V (t )
F
f рез
f
11. Виброметрия
Виброизмерительныепреобразователи
Скорости
перемещения
Ускорения
Датчики
Вибропреобразователи
неподвижных координат
Активные
Пассивные
Вибропреобразователи
инерционного действия
Активные
Пассивные
Омические
Индукционные
Омические
Индукционные
Емкостные
Механические
Емкостные
Пьезоэлектрические
Индуктивные
Индуктивные
Механические
Оптические
Компенсационные
12. Чем, где, как и что мерить
•Частотный диапазон:НЧ - 0 - 200 Гц
СЧ - 10 - 1000 Гц
ВЧ - 100 - 10000 Гц и выше
•Масса датчика уменьшает
амплитуду колебаний и
собственные частоты для
тонкостенных конструкций
•Способ крепления датчика
определяет установочный резонанс
датчика и следовательно определяет
частотный диапазон измеряемых
величин:
- ручной щуп - 0 - 200 Гц
- магнит - 0 - 1500 Гц
- шпилька - 0 - 10000 Гц
13.
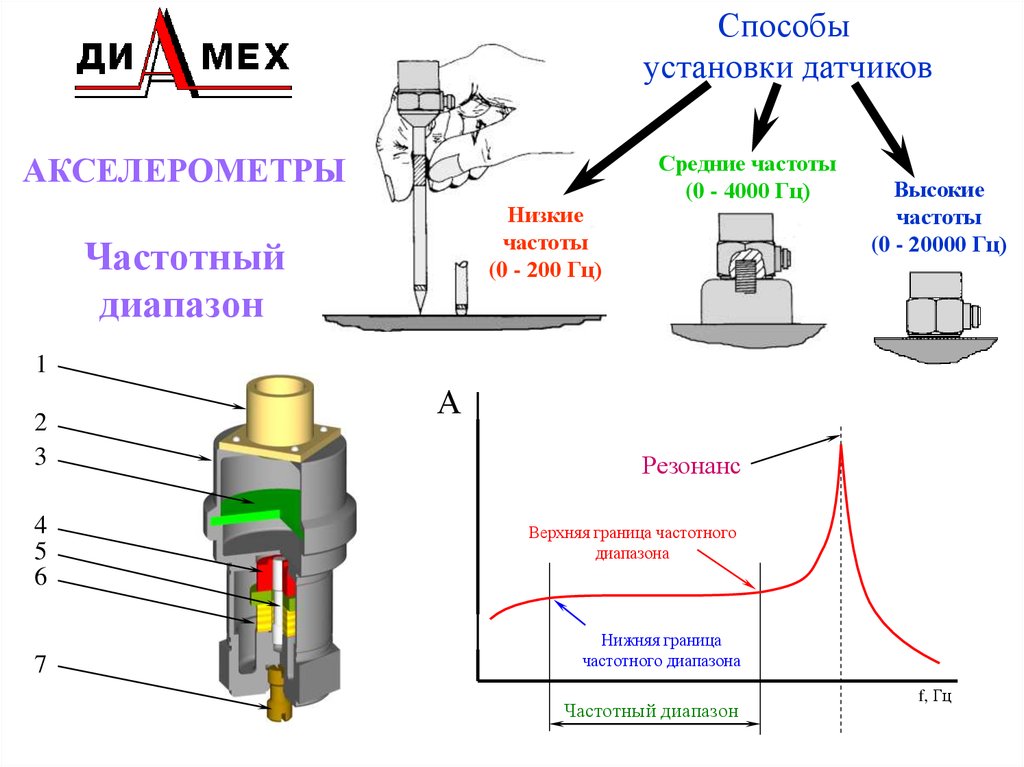
Способыустановки датчиков
АКСЕЛЕРОМЕТРЫ
Низкие
частоты
(0 - 200 Гц)
Частотный
диапазон
Средние частоты
(0 - 4000 Гц)
Высокие
частоты
(0 - 20000 Гц)
1
2
3
4
5
6
7
А
Резонанс
Верхняя граница частотного
диапазона
Нижняя граница
частотного диапазона
Частотный диапазон
f, Гц
14.
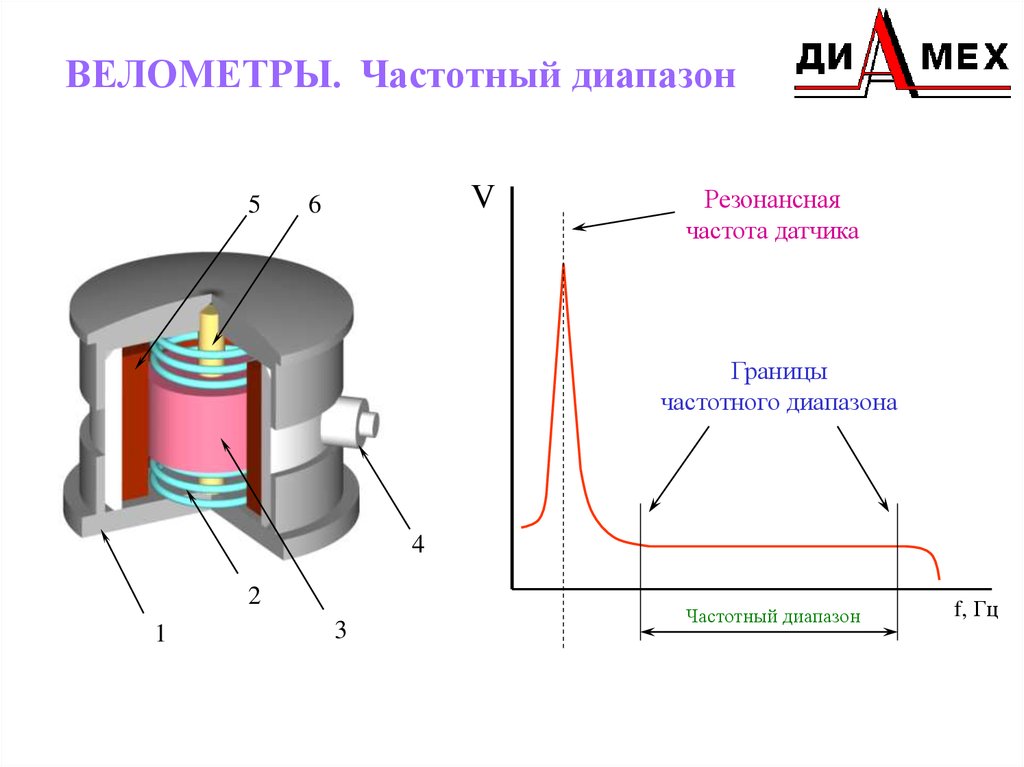
ВЕЛОМЕТРЫ. Частотный диапазон5
V
6
Резонансная
частота датчика
Границы
частотного диапазона
4
2
1
3
Частотный диапазон
f, Гц
15.
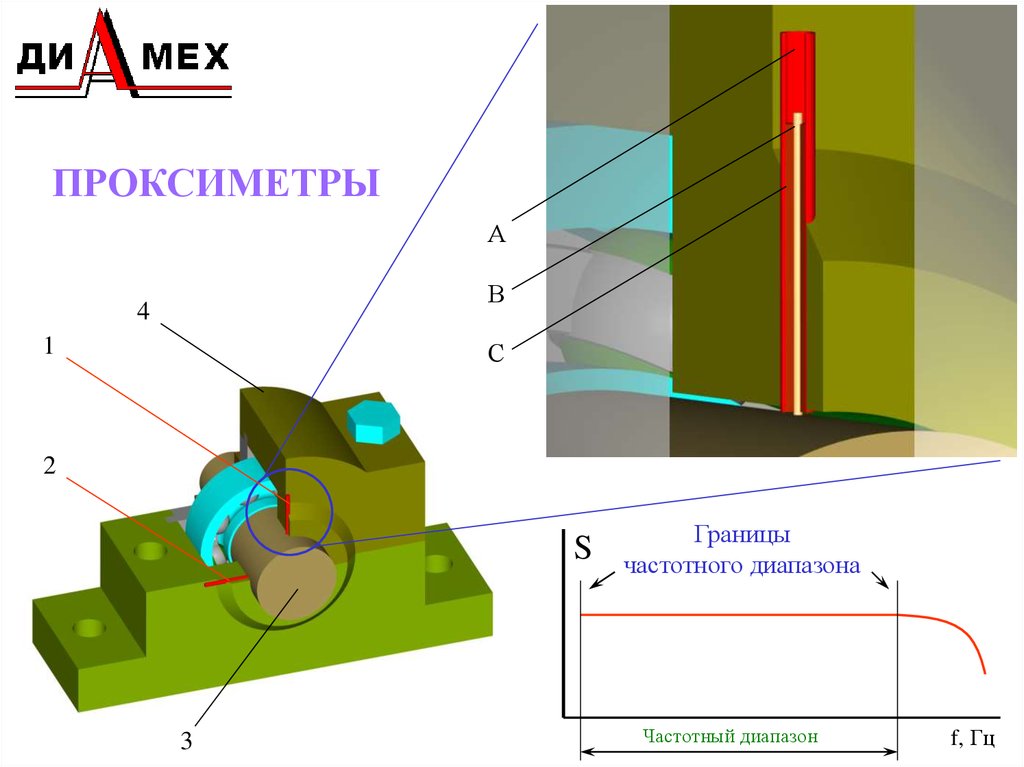
ПРОКСИМЕТРЫА
В
4
1
С
2
S
3
Границы
частотного диапазона
Частотный диапазон
f, Гц
16. Периодический мониторинг I уровня
Периодическийвибромониторинг
контроль ОУ
в стандартной полосе частот,
тренд-анализ
уровень в полосе,
тренд-анализ
специальные методы
контроля вибрации
I уровень периодический мониторинг
вибрационного
состояния
роторного
оборудования в стандартных полосах
частот; тренд-анализ; прогнозирование
ресурса работы оборудования.
Необходим ВИБРОМЕТР
м
/ c 2
Т
о ч к а
Э
. 0
0
8
9 7 0
0
.
4
0
. 3
6
0
. 3
2
0
. 2
8
0
. 2
4
0
. 1
6
0
. 1
2
0
. 0
8
0
. 0
4
0
. 2
0
1
2
3
0
0
4
0
5
0
0
0
0
0
0
0
0
0
0
Г
0
м
/ c 2
т
Д
Е
М
О
1
1
:
0 9 : 1
1
.
8
1
. 6
1
. 4
1
. 2
0
. 8
0
. 6
0
. 4
0
. 2
1
0
1
2
0
3
0
0
/
0
1
0
/
9
0
/
9
1
0
/
1
0
/
/
1
0
9
/
2
9
/
2
8
9
/
17. Периодический мониторинг
м / c 2Т о ч к а
Э
. 0
7
4 5 4 3
0
. 4
II уровень контроль вибрации в полосах,
тренд-анализ; прогнозирование ресурса
0 . 3 2
работы оборудования, выявление причин
0 . 2 8
повышенной вибрации.
0 . 2 4
Необходим ВИБРОАНАЛИЗАТОР
0 . 2
III уровень применение специальных
0 . 1 6
методов анализа
0 . 1 2
(ПИК-ФАКТОР, СПЕКТРЫ
0 . 0 8
ОГИБАЮЩИХ, СТАТИСТИЧЕСКИЕ
0 . 0 4
МЕТОДЫ, и т. д.) 0
0 . 3 6
1
2
3
0
0
4
0
5
0
0
0
0
0
0
0
0
0
0
Г
0
А
а
т
Д
Е
МО
м
/c
е
к
11
:.
0
1
:1 0
З
0
1
6
0 .1 4
0 .1 2
0 .1
1
0 .0 8
2
3
4
0 .0 6
0 .0 4
0 .0 2
0
1
2
0
3
0
/
0
0
0
/
1
9
0
/
1
9
0
/
1
/
0
/
1
9
/
0
2
9
/
8
2
9
/
8
LB
18. Уравновешивание в собственных опорах
Нулевой пуск:Первый пробный пуск:
А0 В0
A1 В1
A1 A1 A0 , B1 B1 B0
~
AI
A1
B1
~
, BI
DI
DI
Второй пробный пуск:
Где D - дисбаланс:
D mr
A2 В2
A2 A2 A0 , B2 B2 B0
Решение:
A2
B2
~
, BII
;
AII
DII
DII
~ AI DI ~ AII DII A0
~
~ D B
D
BII II
0
BI I
~
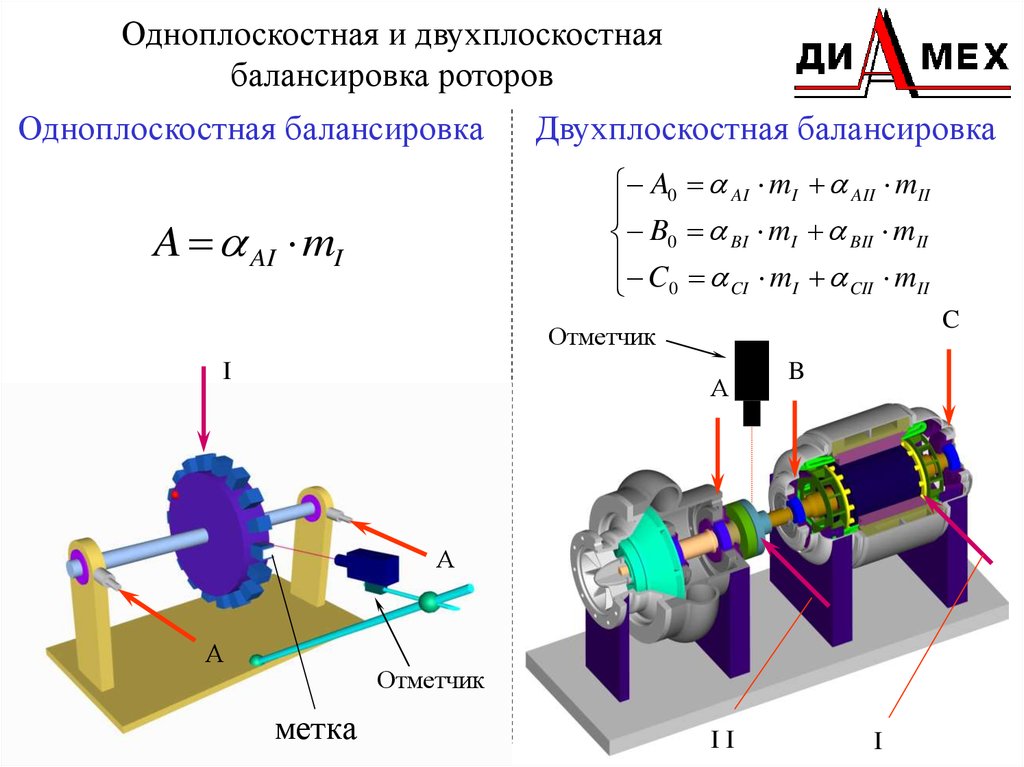
19.
Одноплоскостная и двухплоскостнаябалансировка роторов
Одноплоскостная балансировка
Двухплоскостная балансировка
A AI mI
A0 AI mI AII mII
B0 BI mI BII mII
C m m
CI
I
CII
II
0
C
Отметчик
I
А
B
А
А
Отметчик
метка
II
I
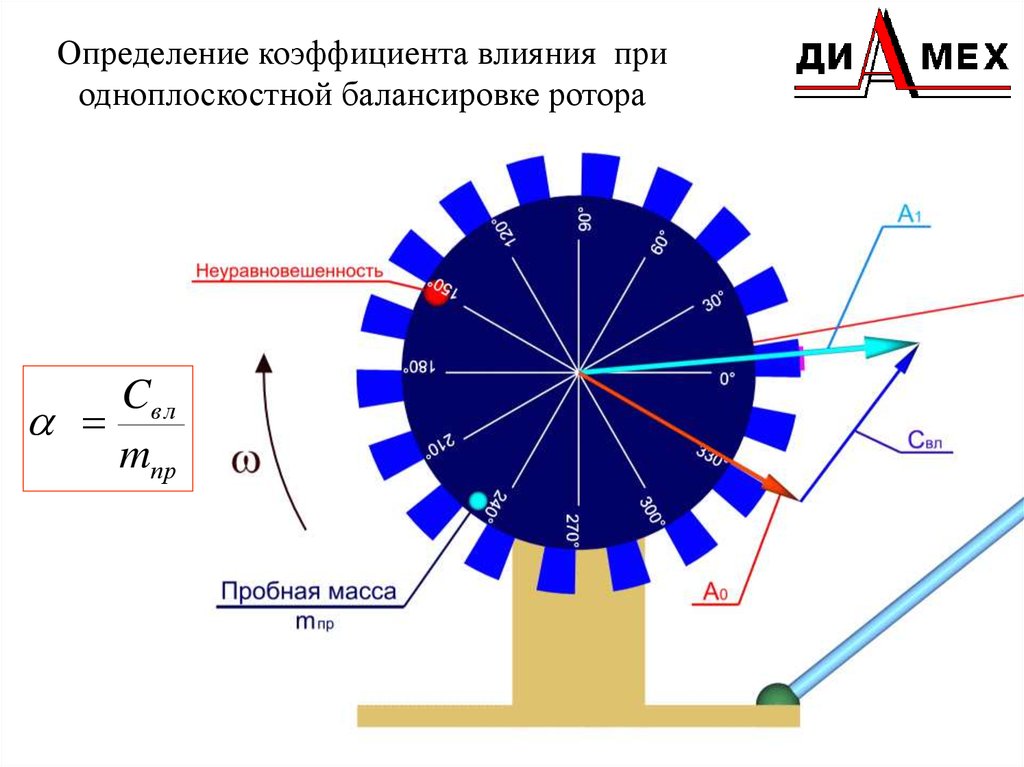
20.
Определение коэффициента влияния приодноплоскостной балансировке ротора
Cвл
mпр
21.
Определение места установки и величиныкорректирующей массы при одноплоскостной
балансировке ротора
mк
A0
22. Неуравновешенность ротора
НеуравновешенностьСтатическая
Несоосность поверхности
ротора поверхностям
шеек
Кривизна вала
ротора
Разница в массах
конструктивных элементов
находящихся на диаметрально
противоположных сторонах ротора
Моментная
Перекосы во время посадки
на вал таких элементов как
коллектор или бандажное
кольцо
Динамическая
насадка на сбалансированный
ротор подшипников качения
с разностенными внкутренними
обоймами
Вызываемые
неуравновешенностью вибрации
имеют частоту, равную частоте
вращения ротора.
23. Некоторые дефекты механической обработки
Дефекты обработкиНецелиндричность
шейки вала
Ослабленная
посадка вращающихся
деталей
f ов 2 f вала
Нагрев и воздействие центробежной
силы приводят к радиальному смещению
деталей, насажанных с натягом. Это
приводит к неуравновешенности и
повышенной вибрации. При снижении
температуры и частоты вращения
восстанавливается плотное соединение с
валом, но ее новое положение может
отличаться от исходного.
Как правило происходит и исчезает
внезапно.
24. Анизотропия жесткости ротора
Часто появление второй гармоники может быть вызвано анизотропией жесткости ротора. Привращении происходит два полных цикла изменения статического прогиба ротора. При снятии
скоростных характеристик по первой и второй гармоникам можно наблюдать резонансы на
частотах, равных критическим для нечетных форм колебаний, деленным на 2.
Максимумы виброперемещений двойной
частоты, вызванные анизотропией, не
могут быть уменьшены балансировкой,
и зависят лишь от соотношения
жестокостей в главных плоскостях
ротора.
Так как, половина третьей «критики»
обычно приближается к рабочей
частоте вращения, даже небольшая
разница в жестокостях приводит к
значительным амплитудам вибрации.
Поэтому, для устранения этого явления
используют динамические гасители
колебаний.
25. Расцентровка, жесткая муфта
Дефектная муфта (а, б, в, г)а: моментная
AII AIII
неуравновешенность
в: статическая
AII AIII
неуравновешенность
д: статическая
AII AIII
неуравновешенность
ж: моментная
неуравновешенность
AII AIII
26. Расцентровка, подвижная муфта
Q (0.1 0.3) PРазмах виброперемещения возрастает пропорционально передаваемой мощности
27. Подшипники скольжения
Средний зазор:(D d ) / 2 R r
Относительный зазор:
/ r 2 / d
hм ин Ф
P
Где: относительный
эксцентриситет = e/ ;
e=OO2 ;
- угол охвата шейки
(границы несущего слоя);
динамическая вязкость
смазки
28. Подшипники качения
Частота дефекта сепаратора:f c k1 f1
Частота дефекта нар. кольца:
f н k1 f1 z
Частота дефекта внут. кольца:
f в k2 f1 z
Дефект тел качения:
dш
f ш 2 f1 0 k1k 2
D
Где:
k1
d
1
(1 ш cos( ))
2
D0
k2
d
1
(1 ш cos( ))
2
D0
29. Метод огибающей
2015000
10
10000
0
5000
-10
-20
0.01
0.02
0.03
0.04
0.05
0.8
0
0
200
400
600
0
200
400
600
0.08
0.7
0.06
0.6
0.04
0.5
0.02
0.4
0.3
0.01
0.02
0.03
0.04
0.05
0
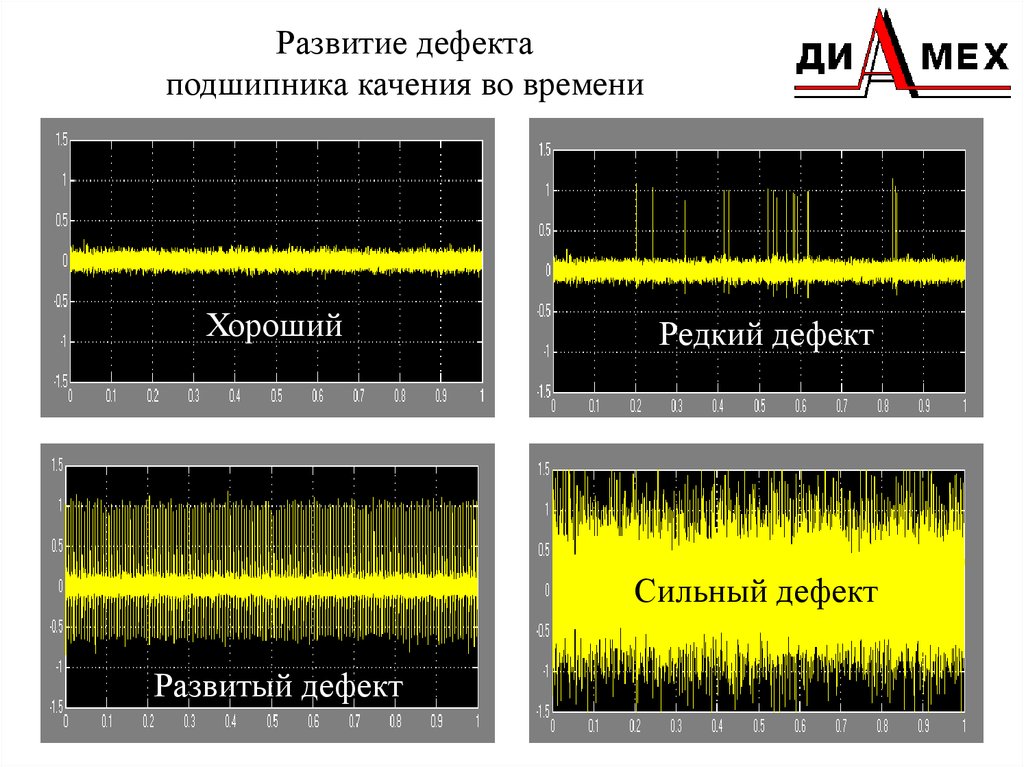
30.
Развитие дефектаподшипника качения во времени
Хороший
Редкий дефект
Сильный дефект
Развитый дефект
31. Плохое крепление машины на фундаменте
32. Неравномерные воздушные зазоры
2 fcfр
О1 - ось цилиндрической расточки; О2 - ось симметрии поверхности полюсов
О - ось вращения
33. Магнитная несимметрия при равномерных воздушных зазорах
Магнитная несимметрияпри равномерных воздушных зазорах
Витковые замыкания
в роторах
fз f р
Вибрации, связанные с
деформациями статора
или магнитной системы
f ст 2 f сети
34. Зубчатые передачи
35. Сдвиг фазы и фазовая поправка
36. Пример расчета допустимой остаточной неуравновешенности
Масса ротора W=100 кг; класс точности балансировки G=2,5;max частота вращения ротора N=3000 об./мин;
радиус плоскостей коррекции R=100 мм.
Доп. остаточная неуравновешенность U=e*W=100*103[г]*8[мкм]*10-3=800 г*мм
Для симметричного ротора u1=u2=U/2=400 г*мм
При радиусе места коррекции r1=r2=R получим mдоб1=mдоб2=400/100=4 г.
37.
Нормы на уравновешивание роторов8мкм
G16 - приводы специального
назначения, детали двигателей,
коленчатые валы, части сельскохозяйственных машин и
дробилок
G6.3 - рабочие колеса насосов
и вентиляторов, ротора электромашин общего назначения
G2.5 - паровые и газовые
турбины, турбокомпрессоры,
приводы станков, маленькие и
специальные ротора электромашин
G1 - маленькие ротора электромашин и приводов специального
назначения
G0.4 - прецизионные шлифовальные колеса, гироскопы
U
9459GW
N
38. Нормы вибрации
A - Низкая вибрация(новые машины)
B - Нормальная
(машина пригодна для эксплуатации
без ограничения срока)
C - Повышенная
(машина не пригодна для
длительной эксплуатации)
D - Авария
Класс I: Отдельные узлы двигателей и агрегатов, полностью соединительные с основной
машиной в рабочих условиях. (Электродвигатели до 15 кВт).
Класс II: Машины средней мощности (электродвигатели 15 – 875 кВт) без специального
фундамента, жестко установленные двигатели или машины (до 300 кВт) на специальном
фундаменте.
Класс III: Большие первичные двигатели и другие большие машины с вращающимися
массами, установленные на жестком и тяжелом фундаменте, относительно жестком в
направлении измерения вибрации.
Класс IV: Большие первичные двигатели и другие большие машины с вращающимися
массами, установленные на относительно податливом в направлении вибрации фундаменте.
39. Типы опор балансировочных станков
Наша схема:1
fр
2
g
R
Классическая схема:
fр
1
kg
W
40. Собственные частоты и формы колебаний системы ротор-опоры
I, II - ротор остается жестким, III, IV - ротор изгибается1, 2 - изгибные формы
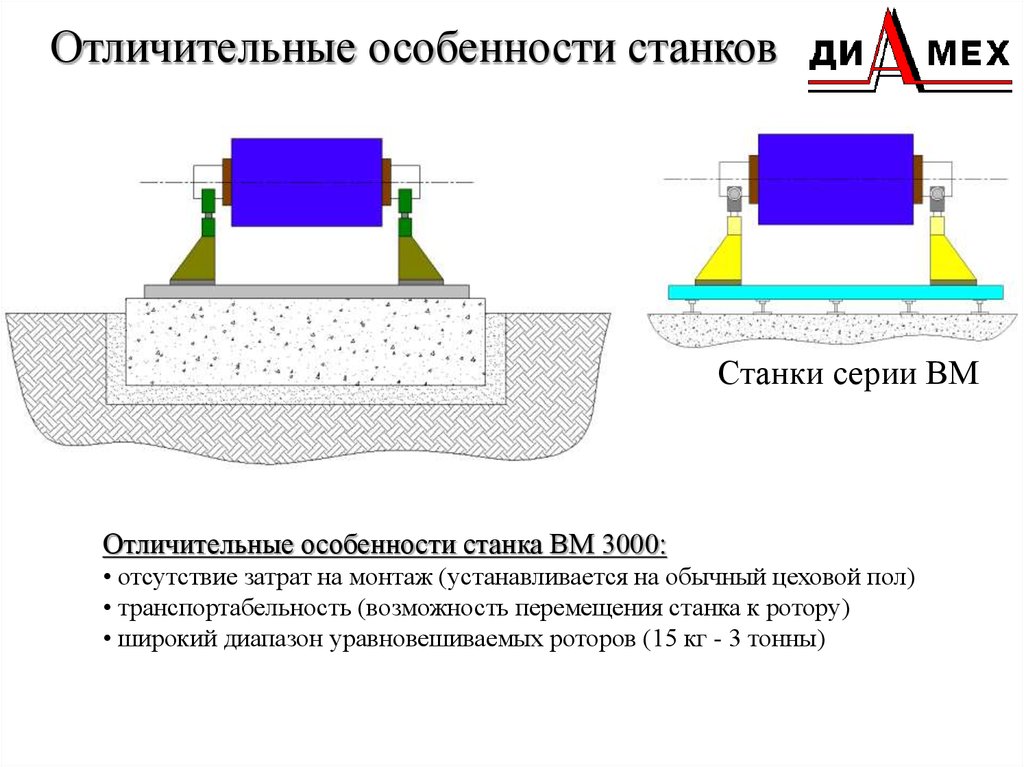
41.
Отличительные особенности станковСтанки серии ВМ
Отличительные особенности станка ВМ 3000:
• отсутствие затрат на монтаж (устанавливается на обычный цеховой пол)
• транспортабельность (возможность перемещения станка к ротору)
• широкий диапазон уравновешиваемых роторов (15 кг - 3 тонны)
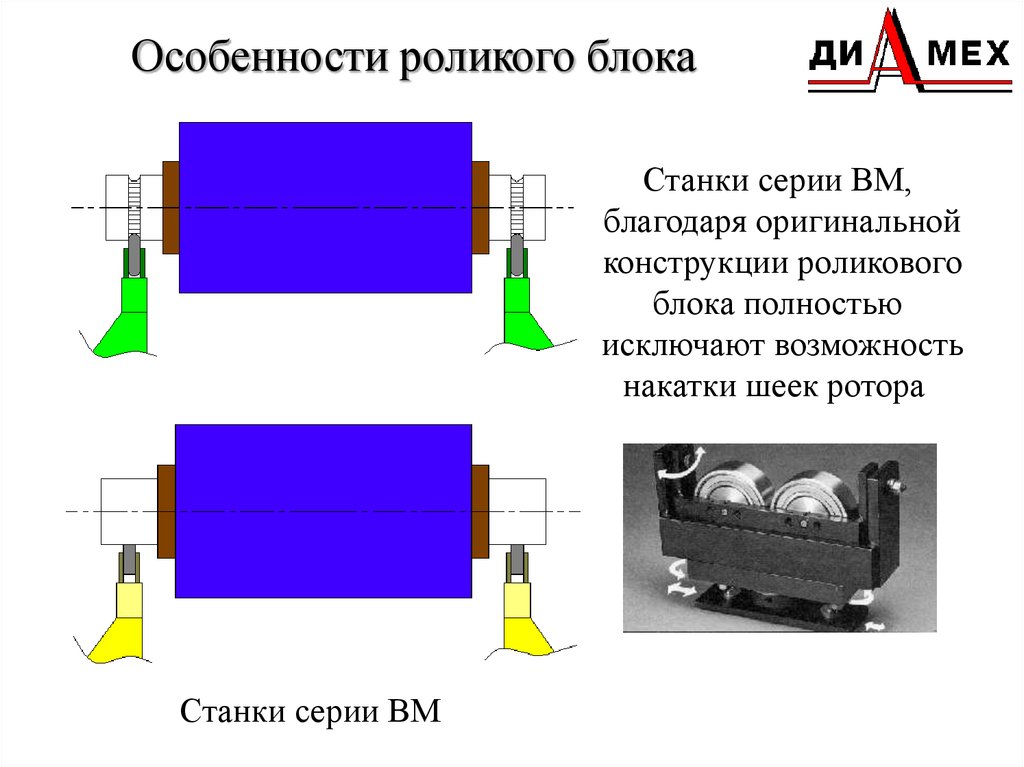
42.
Особенности роликого блокаСтанки серии ВМ,
благодаря оригинальной
конструкции роликового
блока полностью
исключают возможность
накатки шеек ротора
Станки серии ВМ