

 Информатика
ИнформатикаПохожие презентации:



")






Лекция 3. Координатный метод
1.
Лекция 3Координатный метод
Нижельский С.С.,
ст. преп. каф. СИУ
Новокузнецк, 2008
2.
Координатный методКоординатный метод был введен в XVII веке французскими математиками
Р.Декартом и П.Ферма
• каждая точка (пиксел) на экране монитора, на листе бумаги при печати
задается координатами
• любой объект находится в пространстве и описывается своими
координатами
• при изменении положения объекта в пространстве изменяются его
координаты
3.
Преобразование координатПусть задана n-мерная система координат в базисе (k1, k2, …, kn), которая
описывает положение точки в пространстве с помощью числовых значений ki
Если задать другую, N-мерную, систему координат в базисе (m1, m2, …, mN) и
поставить задачу определения координат в новой системе, зная координаты в
старой, то решение можно записать в таком виде (1)
m1 f1 (k1 , k 2 , ..., k n ),
m f (k , k , ..., k ),
2
2
1
2
n
...
mN f N (k1 , k 2 , ..., k n ),
(1)
k1 F1 (m1 , m2 , ..., mN ),
k F (m , m , ..., m ),
2
2
1
2
N
...
k n Fn (m1 , m2 , ..., mN ),
(2)
где fi – функция пересчета i-ой координаты
Обратная задача: по известным координатам (m1, m2, …, mN) определить
координаты (k1, k2, …, kn), записывается в виде (2)
где Fi – функция обратного преобразования
4.
Преобразование координатПо виду функции преобразования различают линейные и нелинейные
преобразования
Если при всех j=1, 2, …, N функции fj – линейные относительно (k1, k2, …,kn),
то есть
fj = aj1k1 + aj2k2 +…+ ajnkn + ajn+1,
где aji – константы, то такие преобразования называются
линейными, а при n=N – аффинными
Если хотя бы при одном j функция fj – нелинейная относительно (k1, k2, …,
kn), тогда преобразование координат в целом является
нелинейным
5.
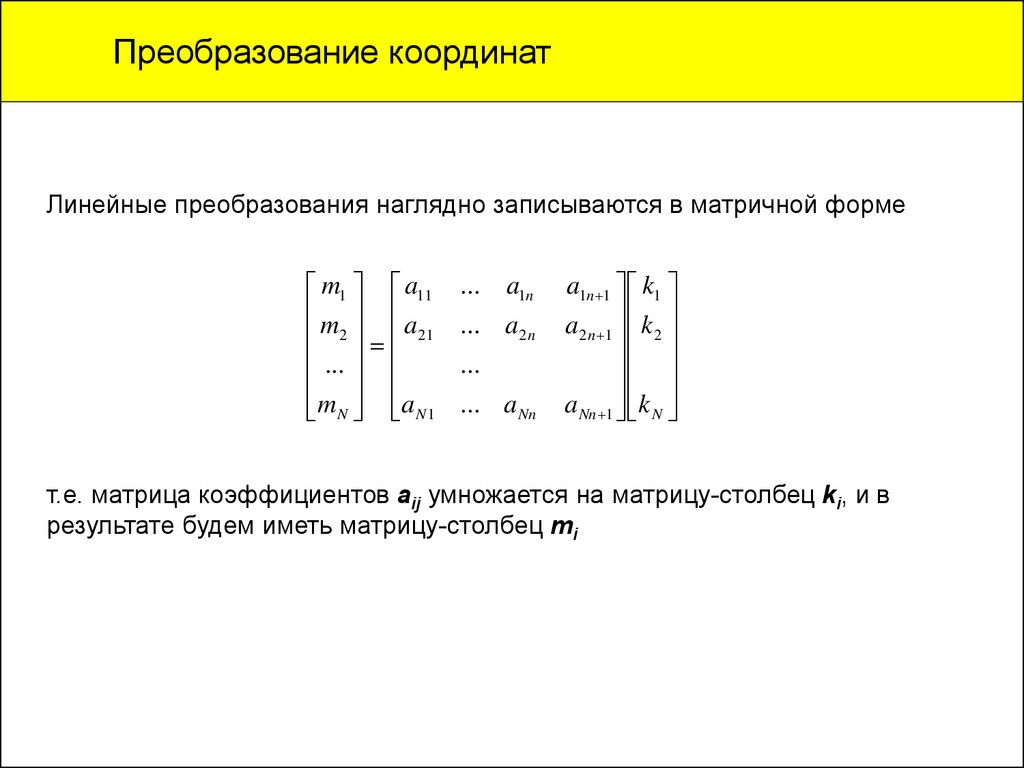
Преобразование координатЛинейные преобразования наглядно записываются в матричной форме
m1 a11
m a
2 21
...
mN a N 1
... a1n
... a2 n
...
... a Nn
a1n 1 k1
a2 n 1 k 2
a Nn 1 k N
т.е. матрица коэффициентов aij умножается на матрицу-столбец ki, и в
результате будем иметь матрицу-столбец mi
6.
Аффинные преобразования на плоскостиЗададим некоторую двумерную систему координат (x,y). Аффинное
преобразование на плоскости описывается формулами
X Ax By C ,
Y Dx Ey F ,
где A, B, …, F – константы. Значение (X,Y) можно рассматривать как
координаты в новой системе координат
Обратное преобразование (X,Y) в (x,y) также является аффинным:
x A' X B' Y C ' ,
y D' X E ' Y F ' ,
В матричном виде:
X A B C x
Y D E F y
1 0 0 1 1
7.
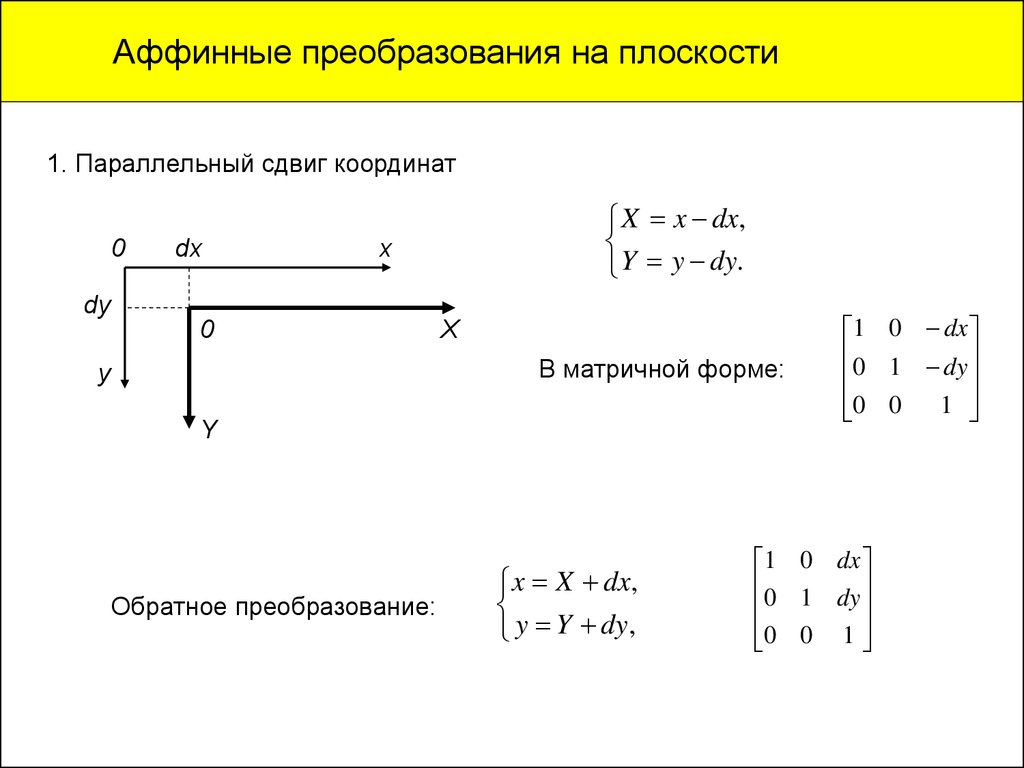
Аффинные преобразования на плоскости1. Параллельный сдвиг координат
0
dx
X x dx,
Y y dy.
x
dy
0
X
В матричной форме:
y
Y
Обратное преобразование:
x X dx,
y Y dy,
1 0 dx
0 1 dy
0 0
1
1 0 dx
0 1 dy
0 0 1
8.
Аффинные преобразования на плоскости2. Растяжение-сжатие осей координат
0
x
X
X x / kx ,
Y y / k y .
y
Y
Обратное преобразование:
В матричной форме:
x Xk x ,
y Yk y ,
k x
0
0
0
1 / k x
0 1/ k
y
0
0
0
ky
0
0
0
1
0
0
1
9.
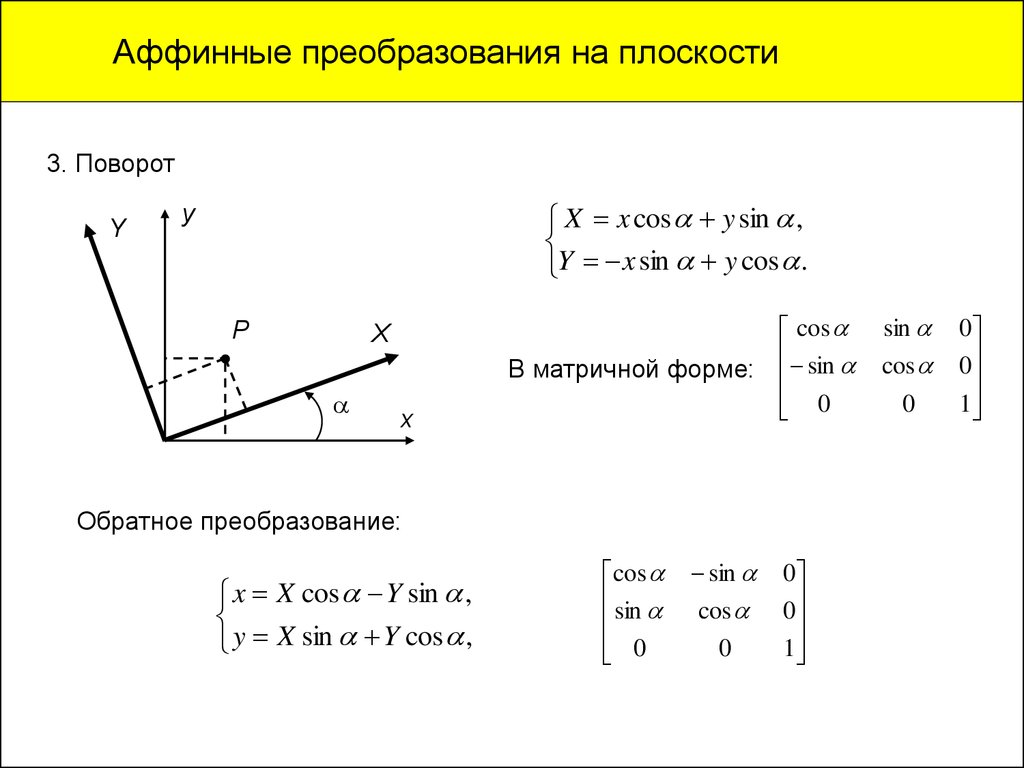
Аффинные преобразования на плоскости3. Поворот
Y
X x cos y sin ,
Y x sin y cos .
y
P
X
x
cos
В матричной форме: sin
0
Обратное преобразование:
x X cos Y sin ,
y X sin Y cos ,
cos
sin
0
sin
cos
0
0
0
1
sin
cos
0
0
0
1
10.
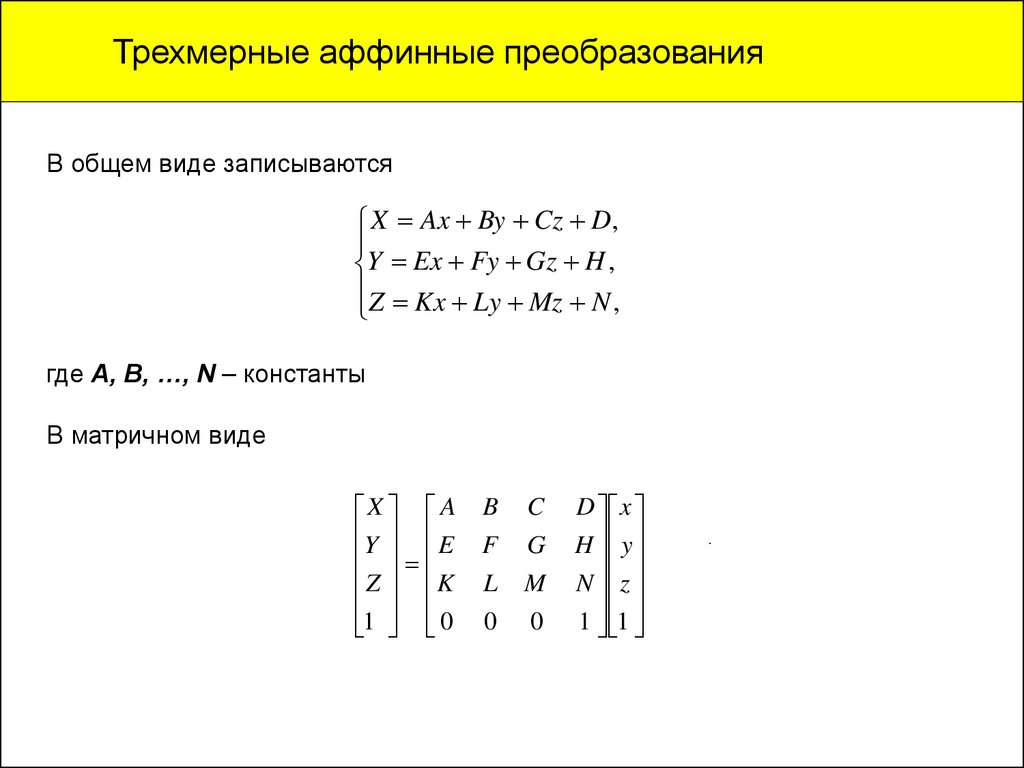
Трехмерные аффинные преобразованияВ общем виде записываются
X Ax By Cz D,
Y Ex Fy Gz H ,
Z Kx Ly Mz N ,
где A, B, …, N – константы
В матричном виде
X A
Y E
Z K
1 0
B
F
L
C
G
M
0
0
D x
H y
N z
1 1
.
11.
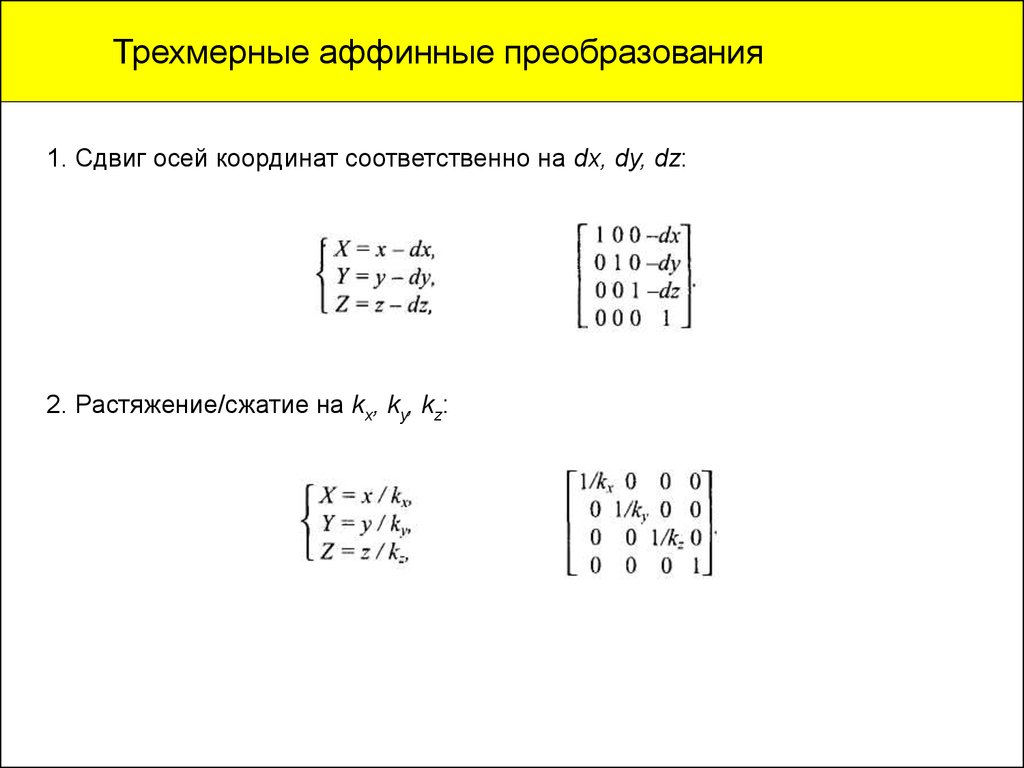
Трехмерные аффинные преобразования1. Сдвиг осей координат соответственно на dx, dy, dz:
2. Растяжение/сжатие на kx, ky, kz:
.
12.
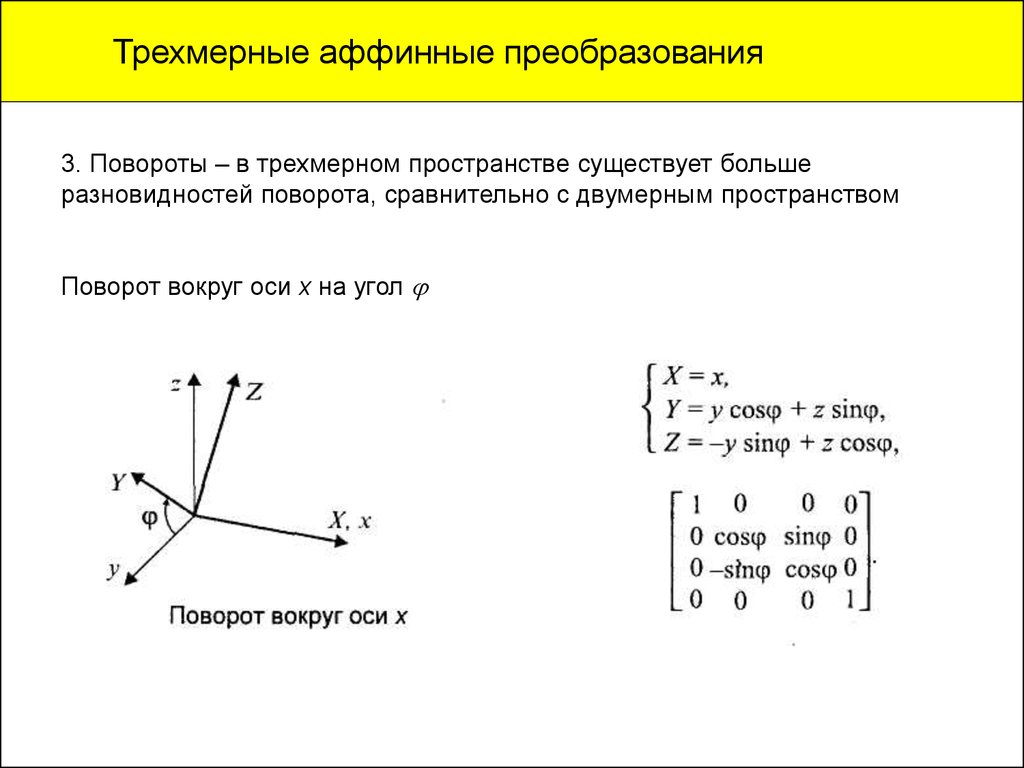
Трехмерные аффинные преобразования3. Повороты – в трехмерном пространстве существует больше
разновидностей поворота, сравнительно с двумерным пространством
Поворот вокруг оси x на угол
.
13.
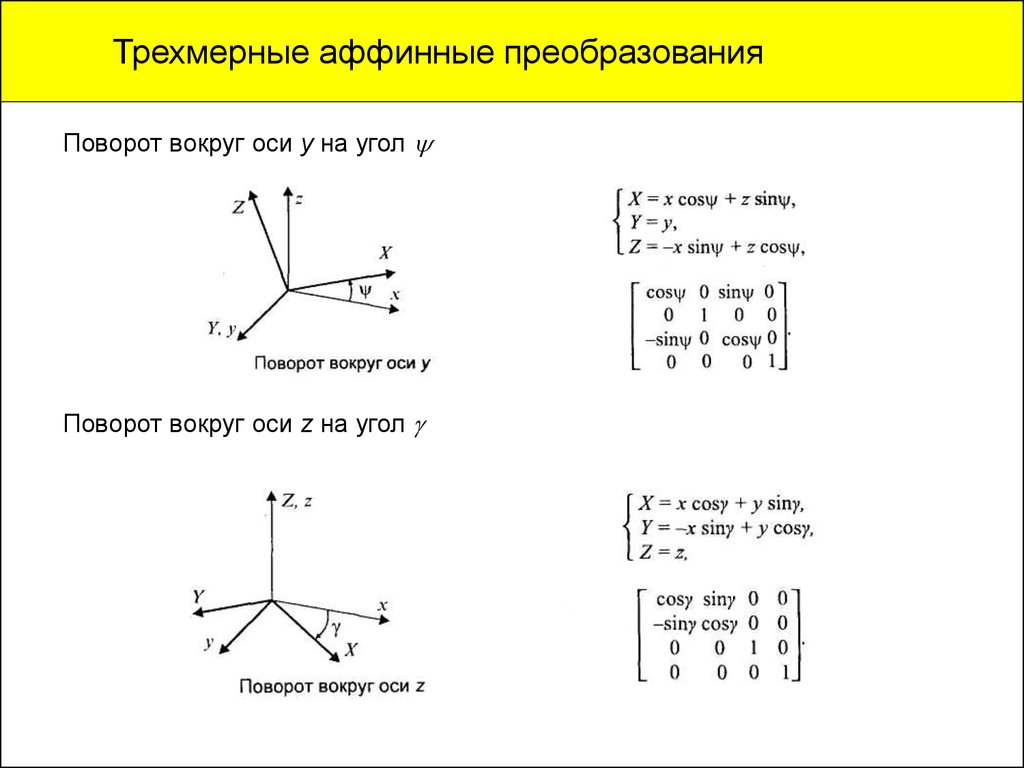
Трехмерные аффинные преобразованияПоворот вокруг оси y на угол
Поворот вокруг оси z на угол
.