


 Промышленность
ПромышленностьПохожие презентации:










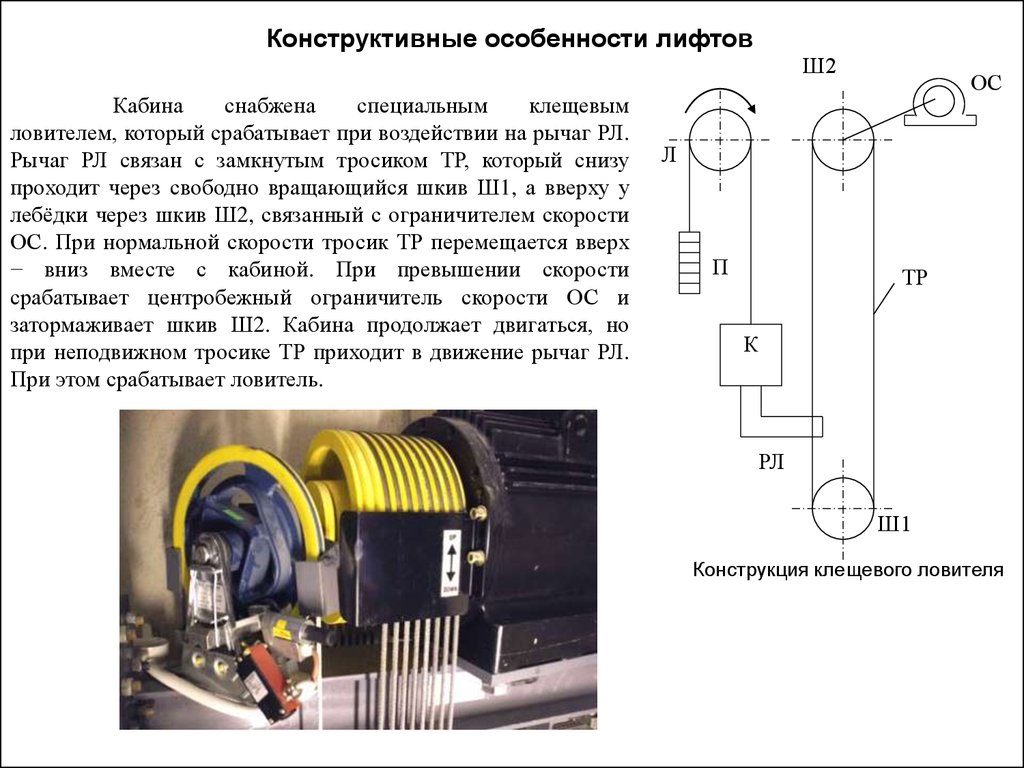
Конструктивные особенности лифтов
1.
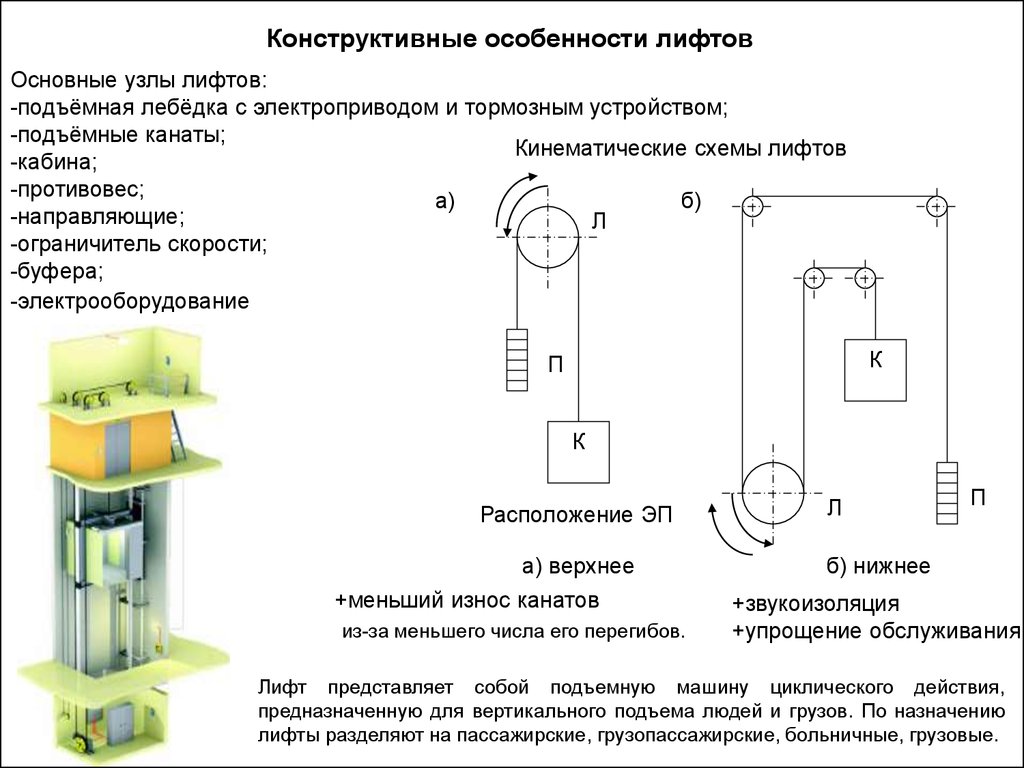
Конструктивные особенности лифтовОсновные узлы лифтов:
-подъёмная лебёдка с электроприводом и тормозным устройством;
-подъёмные канаты;
Кинематические схемы лифтов
-кабина;
-противовес;
а)
б)
-направляющие;
Л
-ограничитель скорости;
-буфера;
-электрооборудование
К
П
К
Расположение ЭП
а) верхнее
+меньший износ канатов
из-за меньшего числа его перегибов.
Л
П
б) нижнее
+звукоизоляция
+упрощение обслуживания
Лифт представляет собой подъемную машину циклического действия,
предназначенную для вертикального подъема людей и грузов. По назначению
лифты разделяют на пассажирские, грузопассажирские, больничные, грузовые.
2.
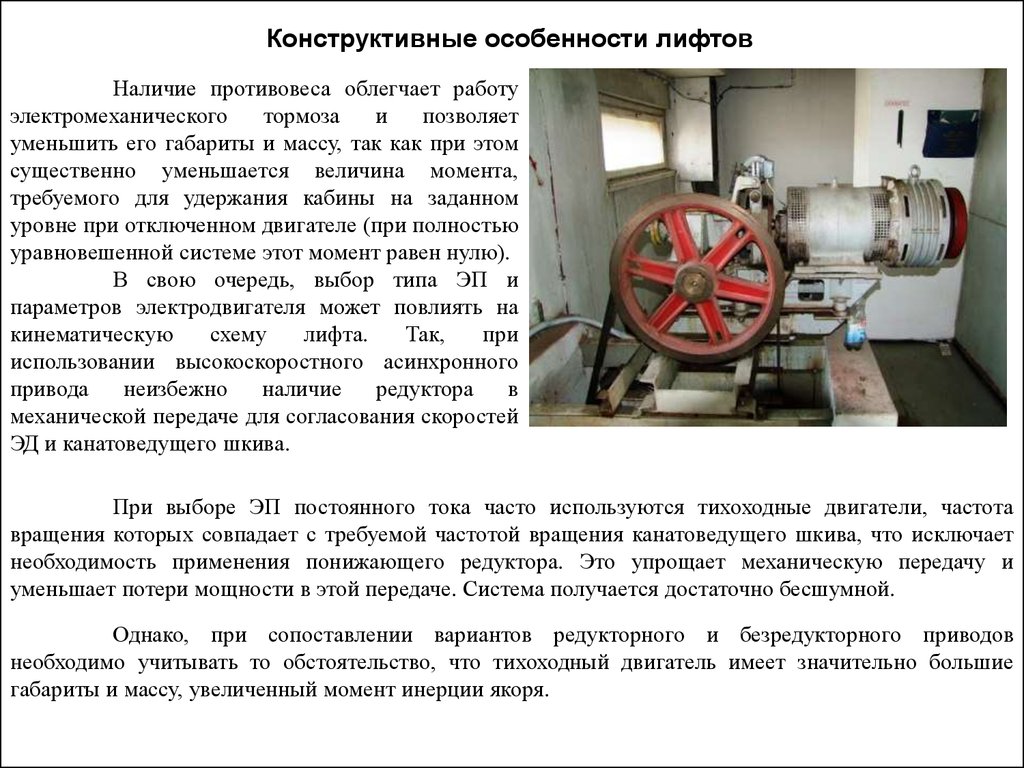
Конструктивные особенности лифтовНаличие противовеса облегчает работу
электромеханического
тормоза
и
позволяет
уменьшить его габариты и массу, так как при этом
существенно уменьшается величина момента,
требуемого для удержания кабины на заданном
уровне при отключенном двигателе (при полностью
уравновешенной системе этот момент равен нулю).
В свою очередь, выбор типа ЭП и
параметров электродвигателя может повлиять на
кинематическую
схему
лифта.
Так,
при
использовании высокоскоростного асинхронного
привода
неизбежно
наличие
редуктора
в
механической передаче для согласования скоростей
ЭД и канатоведущего шкива.
При выборе ЭП постоянного тока часто используются тихоходные двигатели, частота
вращения которых совпадает с требуемой частотой вращения канатоведущего шкива, что исключает
необходимость применения понижающего редуктора. Это упрощает механическую передачу и
уменьшает потери мощности в этой передаче. Система получается достаточно бесшумной.
Однако, при сопоставлении вариантов редукторного и безредукторного приводов
необходимо учитывать то обстоятельство, что тихоходный двигатель имеет значительно большие
габариты и массу, увеличенный момент инерции якоря.
3.
Конструктивные особенности лифтовЛебёдка может быть барабанного или фрикционного типа. В первом случае в качестве
канатоведущего органа используется барабан, на который навивается канат. Фрикционная
лебёдка оснащена канатоведущим шкивом трения, через который проходит несколько
канатов на одних концах которых подвешена кабина, а на других − противовес. Поскольку
диаметр канатоведущего органа пропорционален диаметру каната, фрикционный принцип
привода позволяет резко уменьшить весогабаритные показатели лебёдки. Диаметр
n
канатоведущего органа уменьшается в
раз, где n − количество канатов, а масса лебёдки уменьшается в 4−5 раз. Большая часть лифтов
оснащена фрикционными лебёдками.
В процессе работы лифта кабина сходит по направляющим (проводники), которые охватываются
рамками или специальными башмаками. Противовес движется в своих направляющих, питание в
кабину подаётся по гибкому кабелю.
4.
Конструктивные особенности лифтовВысокие требования безопасности пользования лифтом требуют наличие специального
электромеханического оборудования, предупреждающее аварии и имеющее следующие
элементы:
1) На валу электродвигателя лебёдки имеется тормоз, затормаживающий лебёдку при снятии
напряжения.
2) Подвижный пол кабины, снабженный концевым выключателем, срабатывание которого
свидетельствует о наличии людей в кабине или о перегрузке.
3) Двери шахты снабжены специальным замком, который может быть открыт при наличии кабины
на данном этаже. Для взаимодействия с этими замками кабина снабжена: выдвижными
отводками, которые приводятся в движение электромагнитом. При включении электромагнита
отводка выдвигается, и воздействуя на замок изнутри, разрешает открыть двери шахты.
4) Запрет на движение при открытой любой двери шахты.
5) В случае падения кабины от удара о пол шахты кабину предохраняет масляный гидравлический
или пружинный буфер.
6) Ограничитель скорости и ловители кабины обеспечивают остановку кабины в случае обрыва
подъёмных канатов или превышения скорости.
5.
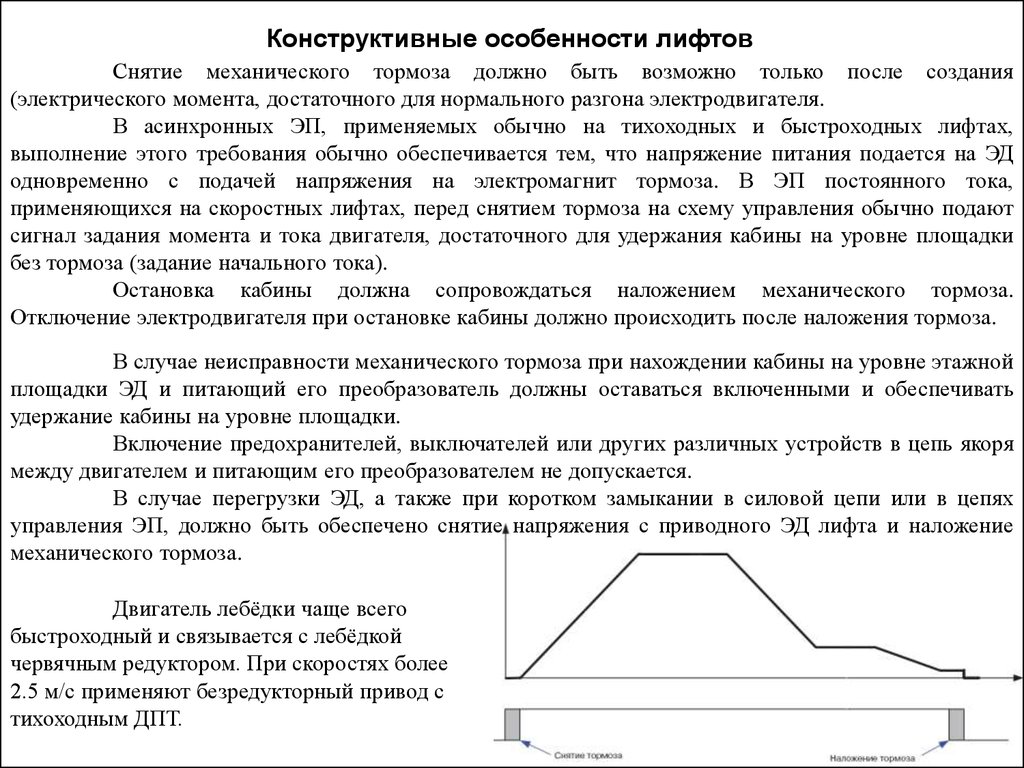
Конструктивные особенности лифтовСнятие механического тормоза должно быть возможно только после создания
(электрического момента, достаточного для нормального разгона электродвигателя.
В асинхронных ЭП, применяемых обычно на тихоходных и быстроходных лифтах,
выполнение этого требования обычно обеспечивается тем, что напряжение питания подается на ЭД
одновременно с подачей напряжения на электромагнит тормоза. В ЭП постоянного тока,
применяющихся на скоростных лифтах, перед снятием тормоза на схему управления обычно подают
сигнал задания момента и тока двигателя, достаточного для удержания кабины на уровне площадки
без тормоза (задание начального тока).
Остановка кабины должна сопровождаться наложением механического тормоза.
Отключение электродвигателя при остановке кабины должно происходить после наложения тормоза.
В случае неисправности механического тормоза при нахождении кабины на уровне этажной
площадки ЭД и питающий его преобразователь должны оставаться включенными и обеспечивать
удержание кабины на уровне площадки.
Включение предохранителей, выключателей или других различных устройств в цепь якоря
между двигателем и питающим его преобразователем не допускается.
В случае перегрузки ЭД, а также при коротком замыкании в силовой цепи или в цепях
управления ЭП, должно быть обеспечено снятие напряжения с приводного ЭД лифта и наложение
механического тормоза.
Двигатель лебёдки чаще всего
быстроходный и связывается с лебёдкой
червячным редуктором. При скоростях более
2.5 м/с применяют безредукторный привод с
тихоходным ДПТ.
6.
Конструктивные особенности лифтовШ2
Кабина
снабжена
специальным
клещевым
ловителем, который срабатывает при воздействии на рычаг РЛ.
Рычаг РЛ связан с замкнутым тросиком ТР, который снизу
проходит через свободно вращающийся шкив Ш1, а вверху у
лебёдки через шкив Ш2, связанный с ограничителем скорости
ОС. При нормальной скорости тросик ТР перемещается вверх
− вниз вместе с кабиной. При превышении скорости
срабатывает центробежный ограничитель скорости ОС и
затормаживает шкив Ш2. Кабина продолжает двигаться, но
при неподвижном тросике ТР приходит в движение рычаг РЛ.
При этом срабатывает ловитель.
ОС
Л
П
ТР
К
РЛ
Ш1
Конструкция клещевого ловителя
7.
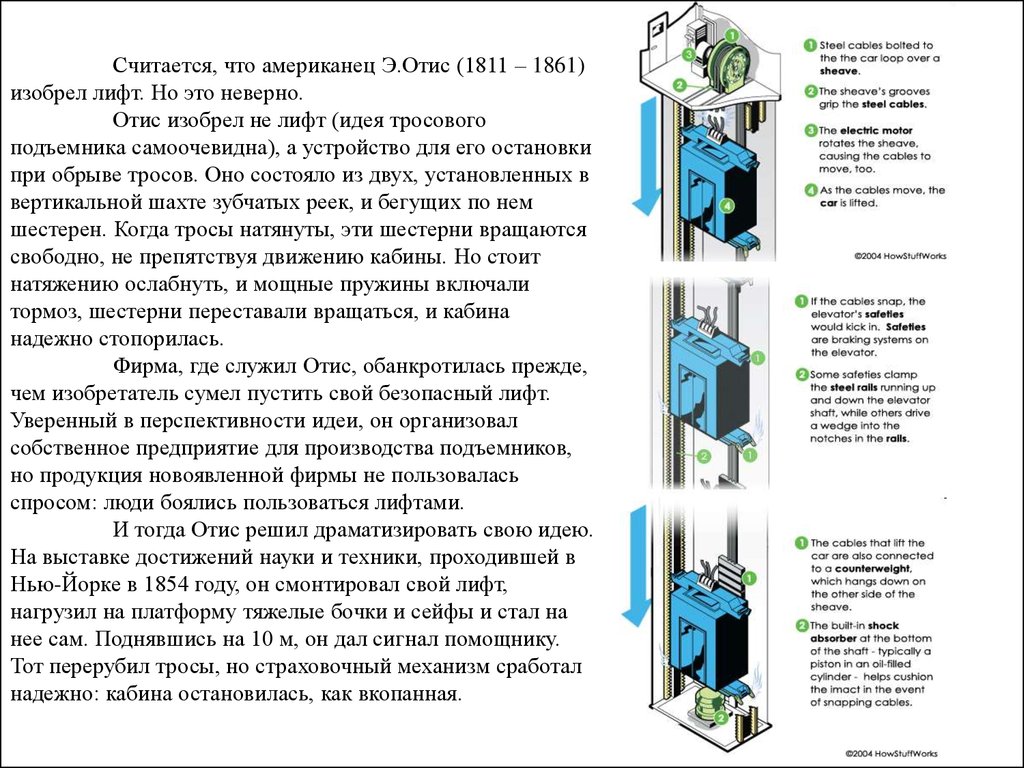
Считается, что американец Э.Отис (1811 – 1861)изобрел лифт. Но это неверно.
Отис изобрел не лифт (идея тросового
подъемника самоочевидна), а устройство для его остановки
при обрыве тросов. Оно состояло из двух, установленных в
вертикальной шахте зубчатых реек, и бегущих по нем
шестерен. Когда тросы натянуты, эти шестерни вращаются
свободно, не препятствуя движению кабины. Но стоит
натяжению ослабнуть, и мощные пружины включали
тормоз, шестерни переставали вращаться, и кабина
надежно стопорилась.
Фирма, где служил Отис, обанкротилась прежде,
чем изобретатель сумел пустить свой безопасный лифт.
Уверенный в перспективности идеи, он организовал
собственное предприятие для производства подъемников,
но продукция новоявленной фирмы не пользовалась
спросом: люди боялись пользоваться лифтами.
И тогда Отис решил драматизировать свою идею.
На выставке достижений науки и техники, проходившей в
Нью-Йорке в 1854 году, он смонтировал свой лифт,
нагрузил на платформу тяжелые бочки и сейфы и стал на
нее сам. Поднявшись на 10 м, он дал сигнал помощнику.
Тот перерубил тросы, но страховочный механизм сработал
надежно: кабина остановилась, как вкопанная.
8.
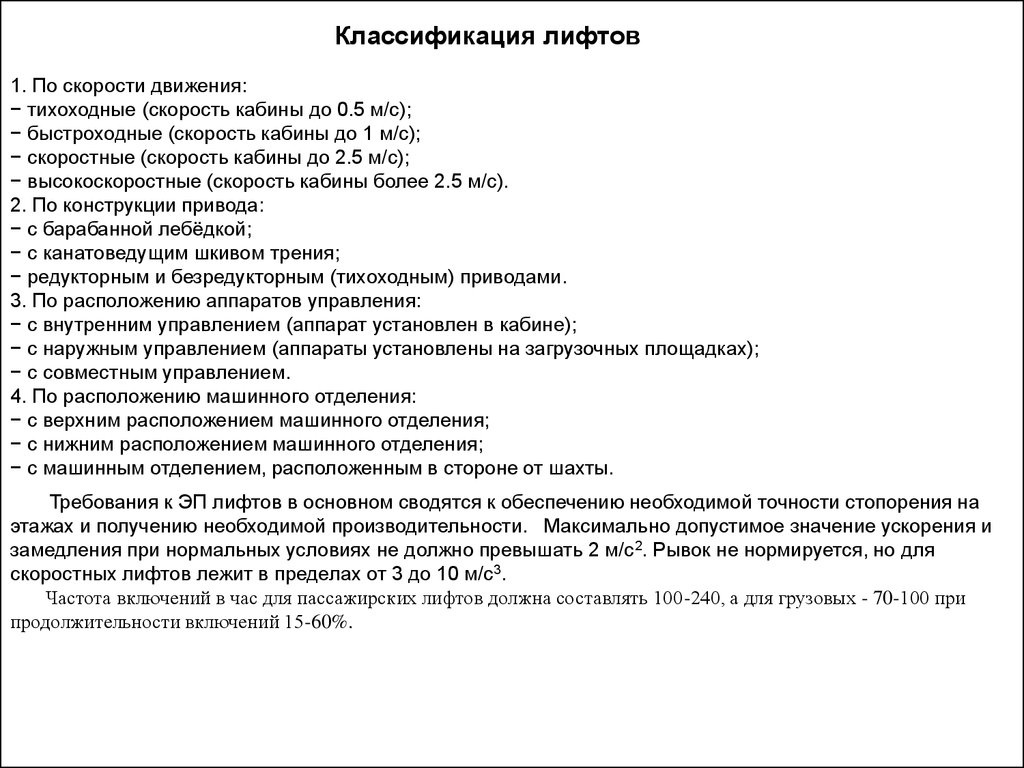
Классификация лифтов1. По скорости движения:
− тихоходные (скорость кабины до 0.5 м/с);
− быстроходные (скорость кабины до 1 м/с);
− скоростные (скорость кабины до 2.5 м/с);
− высокоскоростные (скорость кабины более 2.5 м/с).
2. По конструкции привода:
− с барабанной лебёдкой;
− с канатоведущим шкивом трения;
− редукторным и безредукторным (тихоходным) приводами.
3. По расположению аппаратов управления:
− с внутренним управлением (аппарат установлен в кабине);
− с наружным управлением (аппараты установлены на загрузочных площадках);
− с совместным управлением.
4. По расположению машинного отделения:
− с верхним расположением машинного отделения;
− с нижним расположением машинного отделения;
− с машинным отделением, расположенным в стороне от шахты.
Требования к ЭП лифтов в основном сводятся к обеспечению необходимой точности стопорения на
этажах и получению необходимой производительности. Максимально допустимое значение ускорения и
замедления при нормальных условиях не должно превышать 2 м/с2. Рывок не нормируется, но для
скоростных лифтов лежит в пределах от 3 до 10 м/с3.
Частота включений в час для пассажирских лифтов должна составлять 100-240, а для грузовых - 70-100 при
продолжительности включений 15-60%.
9.
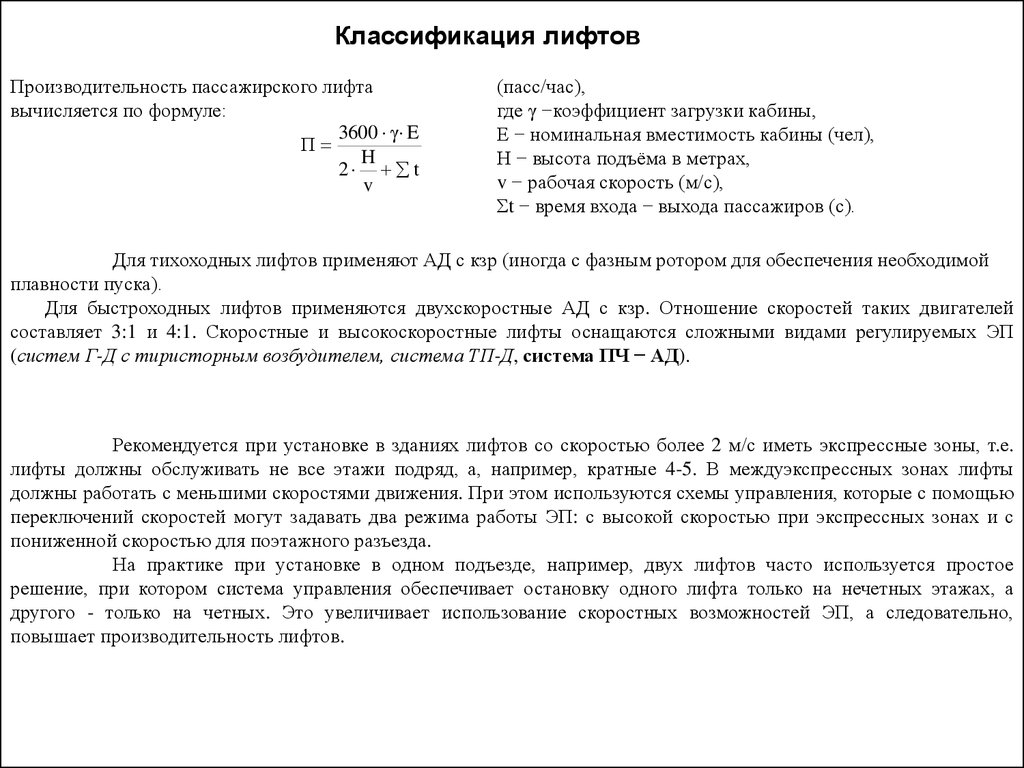
Классификация лифтовПроизводительность пассажирского лифта
вычисляется по формуле:
3600 γ E
П
H
2 t
v
(пасс/час),
где γ −коэффициент загрузки кабины,
Е − номинальная вместимость кабины (чел),
Н − высота подъёма в метрах,
v − рабочая скорость (м/с),
Σt − время входа − выхода пассажиров (с).
Для тихоходных лифтов применяют АД с кзр (иногда с фазным ротором для обеспечения необходимой
плавности пуска).
Для быстроходных лифтов применяются двухскоростные АД с кзр. Отношение скоростей таких двигателей
составляет 3:1 и 4:1. Скоростные и высокоскоростные лифты оснащаются сложными видами регулируемых ЭП
(систем Г-Д с тиристорным возбудителем, система ТП-Д, система ПЧ − АД).
Рекомендуется при установке в зданиях лифтов со скоростью более 2 м/с иметь экспрессные зоны, т.е.
лифты должны обслуживать не все этажи подряд, а, например, кратные 4-5. В междуэкспрессных зонах лифты
должны работать с меньшими скоростями движения. При этом используются схемы управления, которые с помощью
переключений скоростей могут задавать два режима работы ЭП: с высокой скоростью при экспрессных зонах и с
пониженной скоростью для поэтажного разъезда.
На практике при установке в одном подъезде, например, двух лифтов часто используется простое
решение, при котором система управления обеспечивает остановку одного лифта только на нечетных этажах, а
другого - только на четных. Это увеличивает использование скоростных возможностей ЭП, а следовательно,
повышает производительность лифтов.
10.
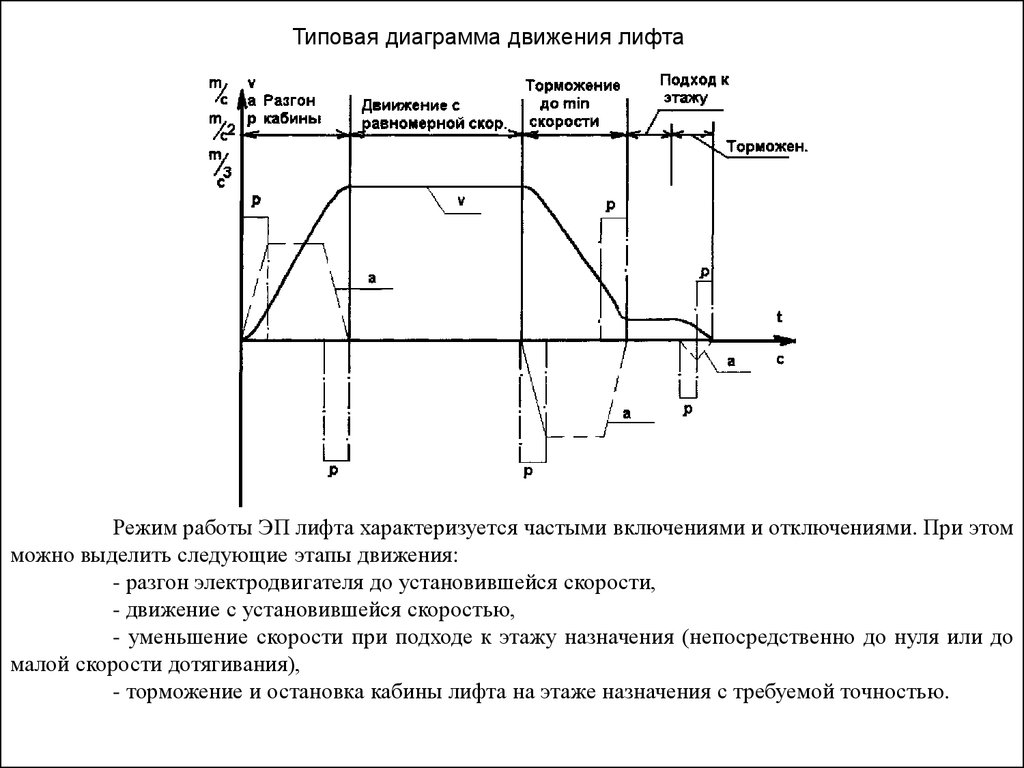
Типовая диаграмма движения лифтаРежим работы ЭП лифта характеризуется частыми включениями и отключениями. При этом
можно выделить следующие этапы движения:
- разгон электродвигателя до установившейся скорости,
- движение с установившейся скоростью,
- уменьшение скорости при подходе к этажу назначения (непосредственно до нуля или до
малой скорости дотягивания),
- торможение и остановка кабины лифта на этаже назначения с требуемой точностью.
11.
12.
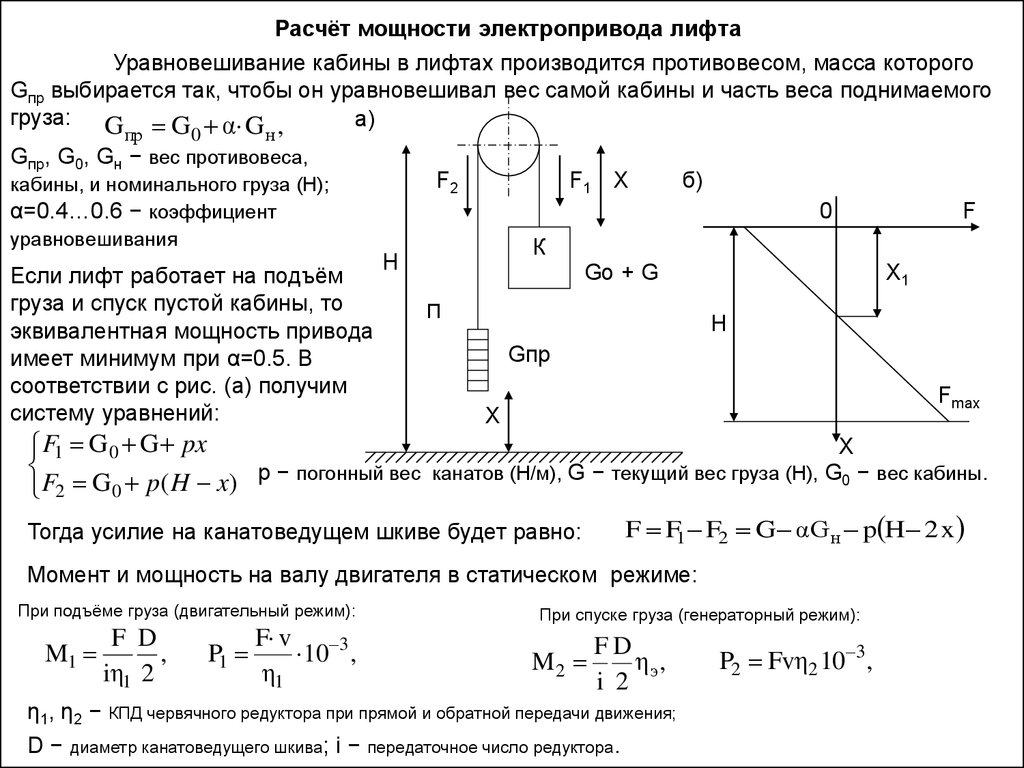
Расчёт мощности электропривода лифтаУравновешивание кабины в лифтах производится противовесом, масса которого
Gпр выбирается так, чтобы он уравновешивал вес самой кабины и часть веса поднимаемого
груза: G G α G ,
а)
пр
н
0
Gпр, G0, Gн − вес противовеса,
кабины, и номинального груза (Н);
α=0.4…0.6 − коэффициент
уравновешивания
Если лифт работает на подъём
груза и спуск пустой кабины, то
эквивалентная мощность привода
имеет минимум при α=0.5. В
соответствии с рис. (а) получим
систему уравнений:
F1 Х
F2
б)
0
К
Н
F1 G 0 G px
р − погонный вес
F2 G 0 p( H x)
Х1
Gо + G
П
Н
Gпр
Fmax
Х
Х
канатов (Н/м), G − текущий вес груза (Н), G0 − вес кабины.
F F1 F2 G αGн p H 2 x
Тогда усилие на канатоведущем шкиве будет равно:
Момент и мощность на валу двигателя в статическом режиме:
При подъёме груза (двигательный режим):
M1
F D
,
iη1 2
P1
F v 3
10 ,
η1
F
При спуске груза (генераторный режим):
M2
FD
ηэ ,
i 2
η1, η2 − КПД червячного редуктора при прямой и обратной передачи движения;
D − диаметр канатоведущего шкива; i − передаточное число редуктора.
P2 Fvη2 10 3 ,
13.
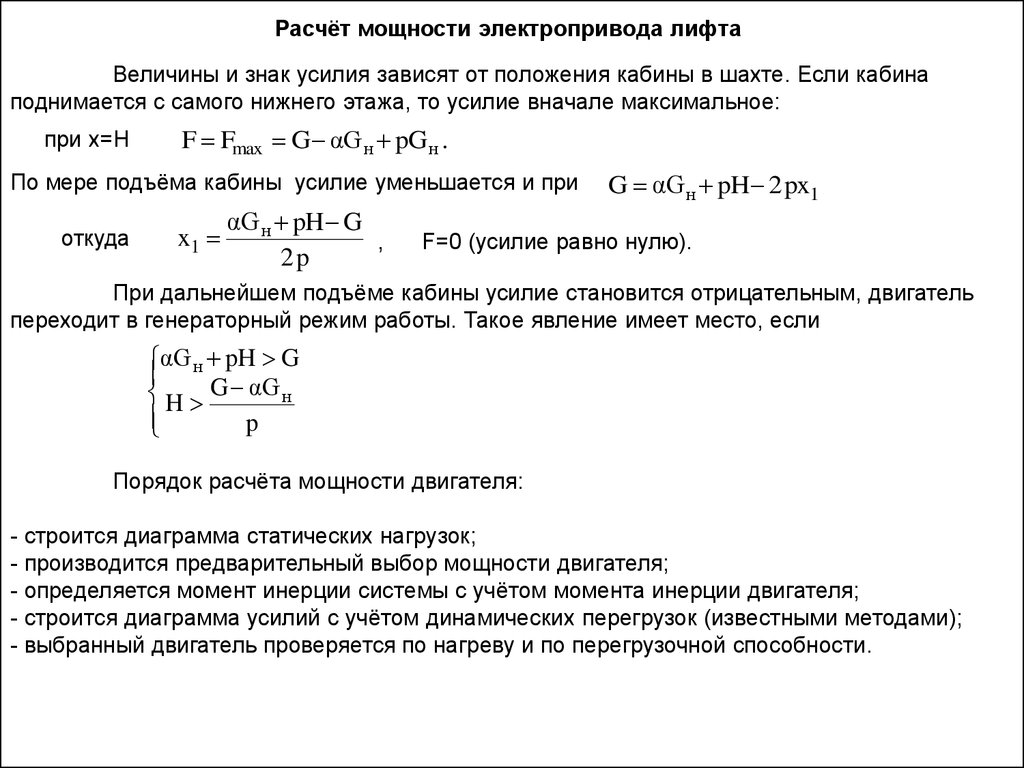
Расчёт мощности электропривода лифтаВеличины и знак усилия зависят от положения кабины в шахте. Если кабина
поднимается с самого нижнего этажа, то усилие вначале максимальное:
при x=H
F Fmax G αGн pGн .
По мере подъёма кабины усилие уменьшается и при
откуда
x1
αG н pH G
,
2p
G αGн pH 2 px1
F=0 (усилие равно нулю).
При дальнейшем подъёме кабины усилие становится отрицательным, двигатель
переходит в генераторный режим работы. Такое явление имеет место, если
αG н pH G
H G αG н
p
Порядок расчёта мощности двигателя:
- строится диаграмма статических нагрузок;
- производится предварительный выбор мощности двигателя;
- определяется момент инерции системы с учётом момента инерции двигателя;
- строится диаграмма усилий с учётом динамических перегрузок (известными методами);
- выбранный двигатель проверяется по нагреву и по перегрузочной способности.
14.
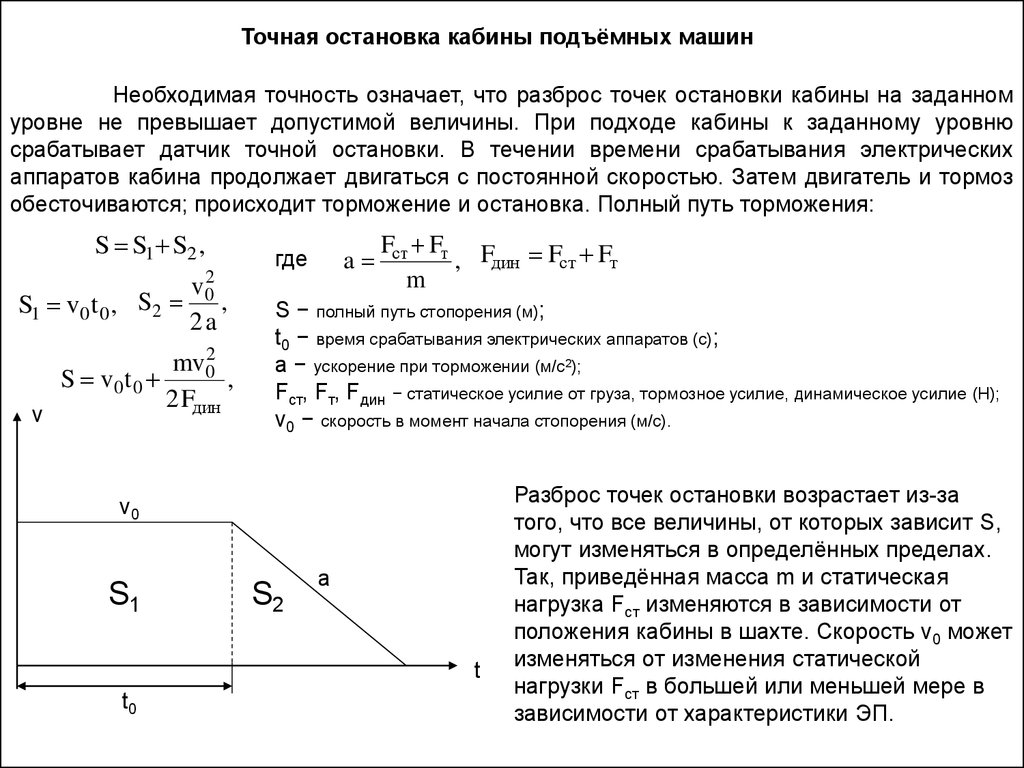
Точная остановка кабины подъёмных машинНеобходимая точность означает, что разброс точек остановки кабины на заданном
уровне не превышает допустимой величины. При подходе кабины к заданному уровню
срабатывает датчик точной остановки. В течении времени срабатывания электрических
аппаратов кабина продолжает двигаться с постоянной скоростью. Затем двигатель и тормоз
обесточиваются; происходит торможение и остановка. Полный путь торможения:
S S1 S2 ,
v 02
S1 v0 t 0 , S2 ,
2a
v
mv 02
S v0 t 0
,
2 Fдин
a
где
Fст Fт F F F
, дин
ст
т
m
S − полный путь стопорения (м);
t0 − время срабатывания электрических аппаратов (с);
а − ускорение при торможении (м/с2);
Fст, Fт, Fдин − статическое усилие от груза, тормозное усилие, динамическое усилие (Н);
v0 − скорость в момент начала стопорения (м/с).
v0
S1
S2
а
t
t0
Разброс точек остановки возрастает из-за
того, что все величины, от которых зависит S,
могут изменяться в определённых пределах.
Так, приведённая масса m и статическая
нагрузка Fст изменяются в зависимости от
положения кабины в шахте. Скорость v0 может
изменяться от изменения статической
нагрузки Fст в большей или меньшей мере в
зависимости от характеристики ЭП.
15.
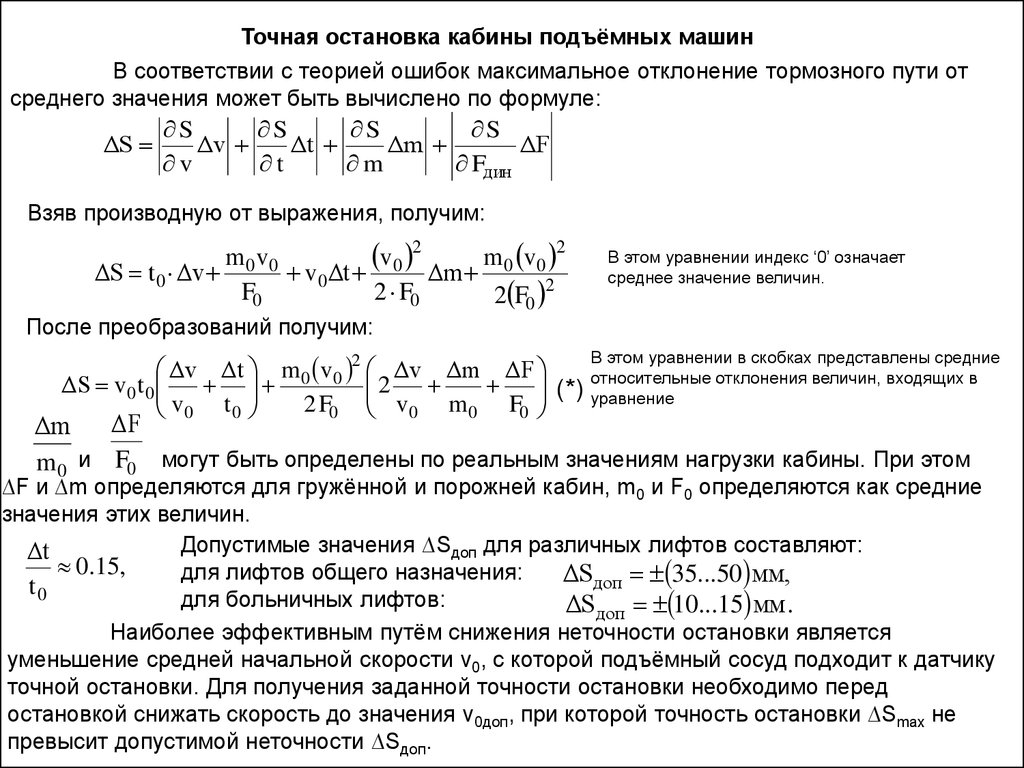
Точная остановка кабины подъёмных машинВ соответствии с теорией ошибок максимальное отклонение тормозного пути от
среднего значения может быть вычислено по формуле:
ΔS
S
S
S
S
Δv
Δt
Δm
ΔF
v
t
m
Fдин
Взяв производную от выражения, получим:
m0 v0
v0 2
m0 v0 2
ΔS t 0 Δv
v0Δt
Δm
F0
2 F0
2 F0 2
В этом уравнении индекс ‘0’ означает
среднее значение величин.
После преобразований получим:
Δv Δt m0 v0 2 Δv Δm ΔF
отклонения величин, входящих в
2
(*) относительные
ΔS v0 t 0
уравнение
2 F0 v0 m0 F0
v0 t 0
В этом уравнении в скобках представлены средние
ΔF
Δm
m0 и F0 могут быть определены по реальным значениям нагрузки кабины. При этом
∆F и ∆m определяются для гружённой и порожней кабин, m0 и F0 определяются как средние
значения этих величин.
Допустимые значения ∆Sдоп для различных лифтов составляют:
Δt
0.15,
для лифтов общего назначения:
ΔSдоп 35...50 мм,
t0
для больничных лифтов:
ΔSдоп 10...15 мм .
Наиболее эффективным путём снижения неточности остановки является
уменьшение средней начальной скорости v0, с которой подъёмный сосуд подходит к датчику
точной остановки. Для получения заданной точности остановки необходимо перед
остановкой снижать скорость до значения v0доп, при которой точность остановки ∆Smax не
превысит допустимой неточности ∆Sдоп.
16.
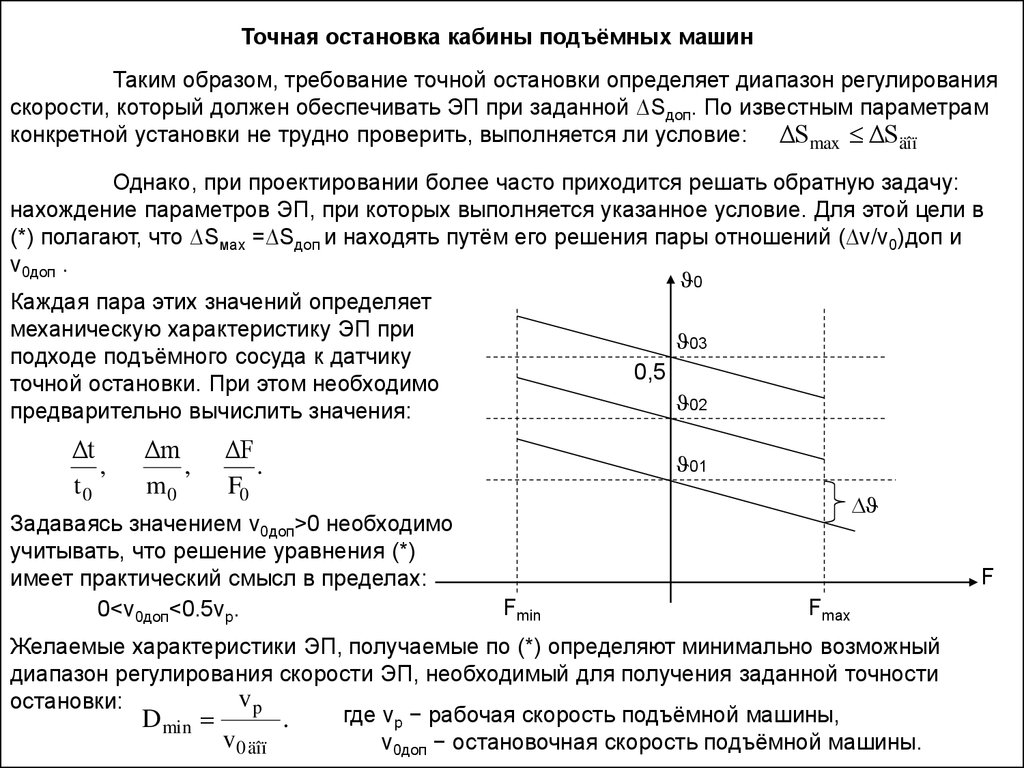
Точная остановка кабины подъёмных машинТаким образом, требование точной остановки определяет диапазон регулирования
скорости, который должен обеспечивать ЭП при заданной ∆Sдоп. По известным параметрам
конкретной установки не трудно проверить, выполняется ли условие: ΔSmax ΔSäîï
Однако, при проектировании более часто приходится решать обратную задачу:
нахождение параметров ЭП, при которых выполняется указанное условие. Для этой цели в
(*) полагают, что ∆Sмах =∆Sдоп и находять путём его решения пары отношений (∆v/v0)доп и
v0доп .
0
Каждая пара этих значений определяет
механическую характеристику ЭП при
03
подходе подъёмного сосуда к датчику
0,5
точной остановки. При этом необходимо
02
предварительно вычислить значения:
Δt
,
t0
Δm
,
m0
ΔF
.
F0
Задаваясь значением v0доп>0 необходимо
учитывать, что решение уравнения (*)
имеет практический смысл в пределах:
0<v0доп<0.5vp.
01
F
Fmin
Fmax
Желаемые характеристики ЭП, получаемые по (*) определяют минимально возможный
диапазон регулирования скорости ЭП, необходимый для получения заданной точности
vp
остановки:
где vp − рабочая скорость подъёмной машины,
D min
.
v0 äîï
v0доп − остановочная скорость подъёмной машины.
17.
Основные схемы управления лифтамиСхема управления лифта включает в себя следующие узлы:
- формирование информации о положении кабины в шахты;
- узел команд;
- узел выбора направления движения;
- узел торможения;
- узел точной остановки;
- узел блокировки и защиты.
Командные сигналы, задающие программу движения лифта, разделяют на 2 типа:
приказы и вызовы. Первые подаются из кабины и определяют этаж, куда пассажир хочет
попасть. Вторые подаются с этажных площадок, куда должна прийти пустая кабина.
В зависимости от реакции на команды различают схемы раздельного и
собирательного управления лифтами. При раздельном принципе управления схема
воспринимает и обрабатывает только одну команду. При собирательном принципе схема
получает команды с нескольких этажей, а затем выполняет их в очерёдности прохождения
заказанных этажей. Наиболее полно собирательное управление реализуется в групповых
схемах управления несколькими лифтами. Когда команда “вызов” с данного этажа
выполняется лифтом, кабина которого находится ближе других. Основным узлом,
обеспечивающим автоматическую работу лифта является узел контроля положения кабины в
шахте. Устройство, формирующее эту информацию, называется селектором.
18.
Основные схемы управления лифтамиПростейший и наиболее распространённый селектор − это совокупность
размещаемых на каждом этаже этажных трёхпозиционных переключателей. Эти
переключатели взаимодействуют с отводкой, расположенной на кабине, в результате чего
они перебрасываются в то или иное положение в зависимости от направления движения
кабины. При остановке кабины на заданном этаже соответствующий этажный переключатель
занимает нейтральное положение. Поскольку этажный переключатель является источником
команды на стопорения, длина отводки выбирается равной двойному пути стопорения, т.к. та
же отводка действует при подходе кабины к заданному этажу сверху и снизу.
В скоростных и высокоскоростных лифтах из-за значительной скорости этажные
переключатели работают неудовлетворительно. В этих случаях селектор выполняется в виде
механического путевого выключателя, связанного цепью с кабиной или с валом лебёдки.
Применительно к лифтам такое устройство называется путеуказательным аппаратом.
Достоинством такого аппарата является работа при любых скоростях. Недостаток −
возможные погрешности из-за косвенности получаемой информации. В последнее время
стали применять электрические селекторы с бесконтактными датчиками положения кабины.
19.
Схема управления двухскоростным лифтом с использованиемэтажных переключателей
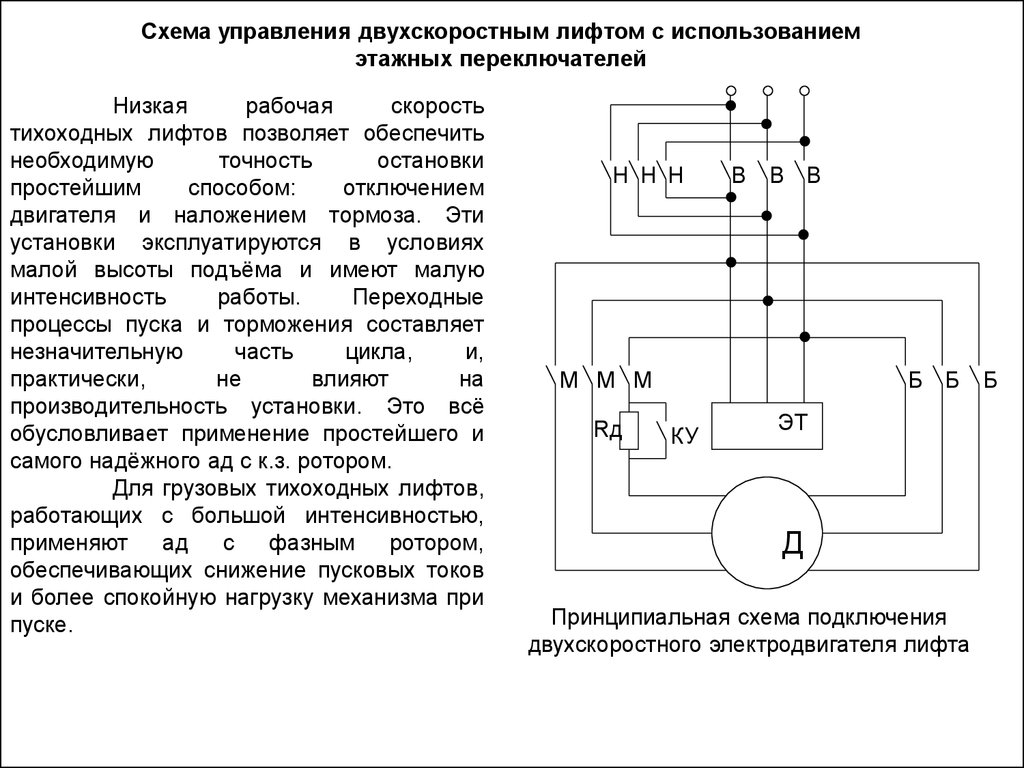
Низкая
рабочая
скорость
тихоходных лифтов позволяет обеспечить
необходимую
точность
остановки
простейшим
способом:
отключением
двигателя и наложением тормоза. Эти
установки эксплуатируются в условиях
малой высоты подъёма и имеют малую
интенсивность
работы.
Переходные
процессы пуска и торможения составляет
незначительную
часть
цикла,
и,
практически,
не
влияют
на
производительность установки. Это всё
обусловливает применение простейшего и
самого надёжного ад с к.з. ротором.
Для грузовых тихоходных лифтов,
работающих с большой интенсивностью,
применяют
ад
с
фазным
ротором,
обеспечивающих снижение пусковых токов
и более спокойную нагрузку механизма при
пуске.
Н Н Н
В
В В
М М М
Rд
Б Б
КУ
ЭТ
Д
Принципиальная схема подключения
двухскоростного электродвигателя лифта
Б
20.
Схема управления двухскоростным лифтом с использованиемэтажных переключателей
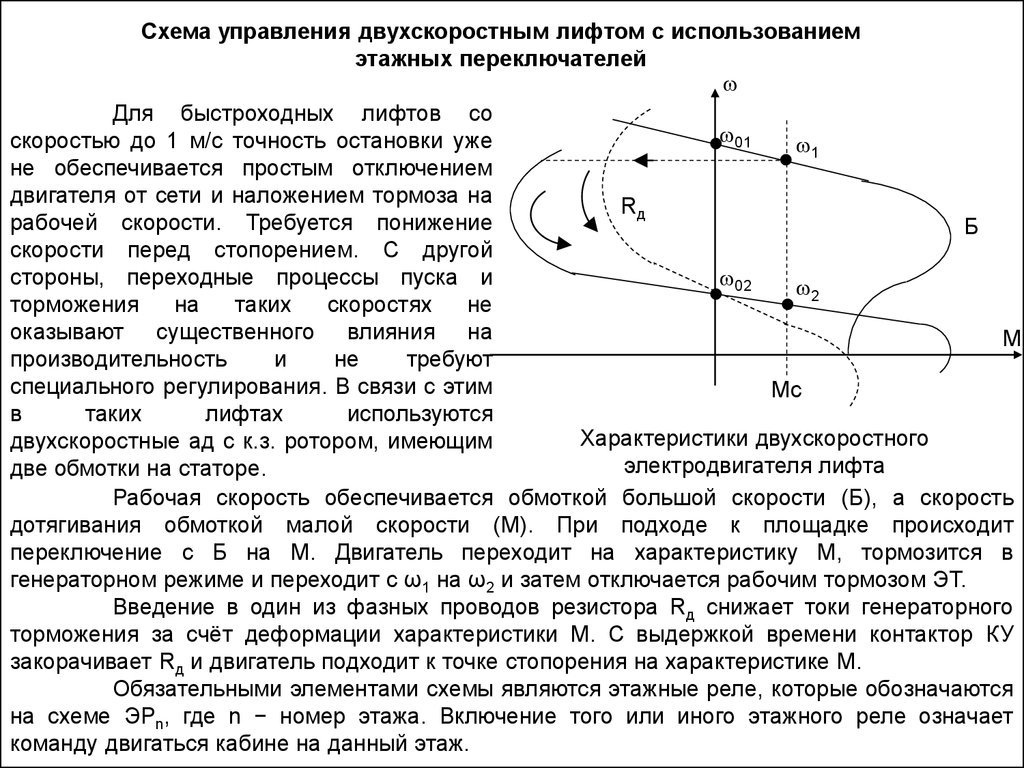
Для быстроходных лифтов со
01
скоростью до 1 м/с точность остановки уже
1
не обеспечивается простым отключением
двигателя от сети и наложением тормоза на
Rд
рабочей скорости. Требуется понижение
Б
скорости перед стопорением. С другой
стороны, переходные процессы пуска и
02
2
торможения
на
таких
скоростях
не
оказывают существенного влияния на
М
производительность
и
не
требуют
специального регулирования. В связи с этим
Мс
в
таких
лифтах
используются
Характеристики двухскоростного
двухскоростные ад с к.з. ротором, имеющим
электродвигателя лифта
две обмотки на статоре.
Рабочая скорость обеспечивается обмоткой большой скорости (Б), а скорость
дотягивания обмоткой малой скорости (М). При подходе к площадке происходит
переключение с Б на М. Двигатель переходит на характеристику М, тормозится в
генераторном режиме и переходит с ω1 на ω2 и затем отключается рабочим тормозом ЭТ.
Введение в один из фазных проводов резистора Rд снижает токи генераторного
торможения за счёт деформации характеристики М. С выдержкой времени контактор КУ
закорачивает Rд и двигатель подходит к точке стопорения на характеристике М.
Обязательными элементами схемы являются этажные реле, которые обозначаются
на схеме ЭРn, где n − номер этажа. Включение того или иного этажного реле означает
команду двигаться кабине на данный этаж.
21.
Схема управления двухскоростным лифтом с использованиемэтажных переключателей
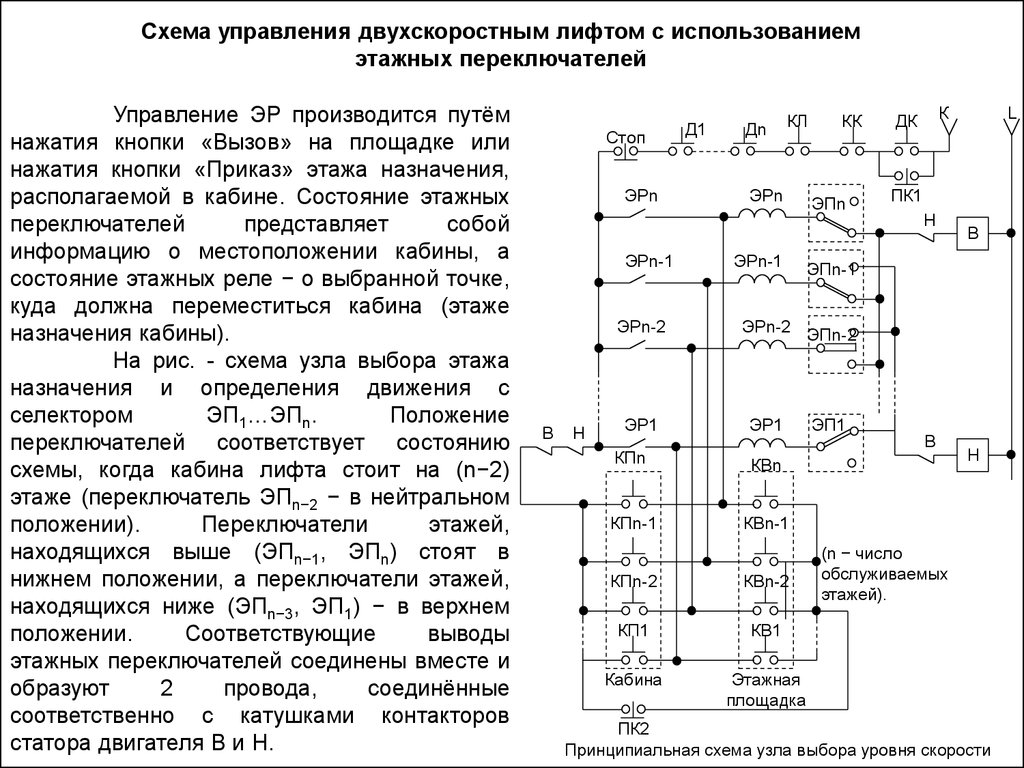
Управление ЭР производится путём
нажатия кнопки «Вызов» на площадке или
нажатия кнопки «Приказ» этажа назначения,
располагаемой в кабине. Состояние этажных
переключателей
представляет
собой
информацию о местоположении кабины, а
состояние этажных реле − о выбранной точке,
куда должна переместиться кабина (этаже
назначения кабины).
На рис. - схема узла выбора этажа
назначения и определения движения с
селектором
ЭП1…ЭПn.
Положение
переключателей соответствует состоянию
схемы, когда кабина лифта стоит на (n−2)
этаже (переключатель ЭПn−2 − в нейтральном
положении).
Переключатели
этажей,
находящихся выше (ЭПn−1, ЭПn) стоят в
нижнем положении, а переключатели этажей,
находящихся ниже (ЭПn−3, ЭП1) − в верхнем
положении.
Соответствующие
выводы
этажных переключателей соединены вместе и
образуют
2
провода,
соединённые
соответственно с катушками контакторов
статора двигателя В и Н.
Стоп
ЭРn
ЭРn-1
ЭРn-2
В
Н
ЭР1
Д1
Дn
КЛ
ЭРn
ЭРn-1
КК
ЭПn
К
ДК
L
ПК1
Н
В
ЭПn-1
ЭРn-2 ЭПn-2
ЭР1
КПn
КВn
КПn-1
КВn-1
КПn-2
КВn-2
КП1
КВ1
Кабина
Этажная
площадка
ЭП1
В
Н
(n − число
обслуживаемых
этажей).
ПК2
Принципиальная схема узла выбора уровня скорости
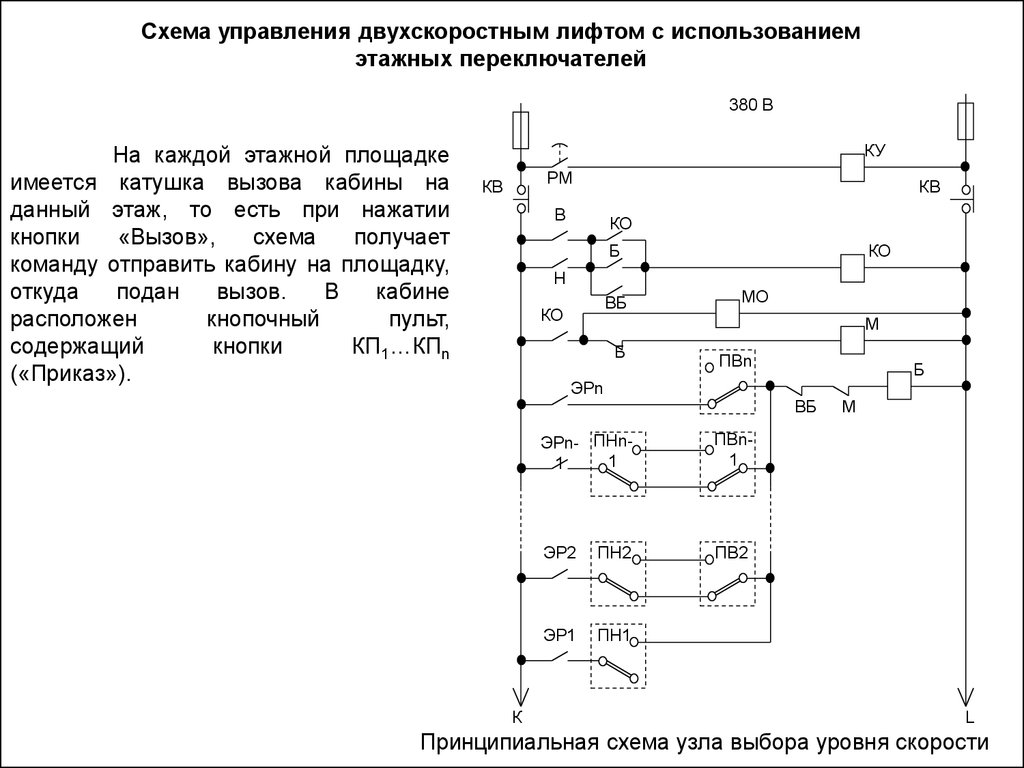
22.
Схема управления двухскоростным лифтом с использованиемэтажных переключателей
380 В
На каждой этажной площадке
имеется катушка вызова кабины на
данный этаж, то есть при нажатии
кнопки
«Вызов»,
схема
получает
команду отправить кабину на площадку,
откуда
подан
вызов.
В
кабине
расположен
кнопочный
пульт,
содержащий
кнопки
КП1…КПn
(«Приказ»).
КУ
РМ
КВ
КВ
В
КО
Б
Н
ВБ
КО
КО
МО
М
Б
ПВn
ЭРn
К
Б
ВБ
ЭРn- ПНn1
1
ПВn1
ЭР2
ПН2
ПВ2
ЭР1
ПН1
М
L
Принципиальная схема узла выбора уровня скорости
23.
Замкнутые системы регулирования ЭП высокоскоростных лифтов.Функциональная схема управления лифтом Останкинской телебашни
Описанные лифты с асинхронным ЭП очень широко применяются для жилых и
производственных зданий с количеством этажей до 14. Для высотных зданий применяются
скоростные и высокоскоростные лифты с замкнутыми системами регулируемого ЭП. На
Украине выпускаются системы электропривода высокоскоростного лифта грузоподъёмностью
1000 кг со скоростью 2 м/с для зданий от 30 до 40 этажей. Предусмотрена схема
собирательного управления несколькими лифтами на основе бесконтактных логических
элементов. ЭП выполнен безредукторным, по системе ТП-Д с использованием тихоходного
дпт независимого возбуждения. Система управления ЭП − двухконтурная подчинённого
регулирования. В зоне точной остановки подключается третий контур регулирования
положения, который обеспечивает автоматическое выравнивание пола кабины и этажной
площадки. Применён задатчик интенсивности, обеспечивающий линейное изменение
ускорения, пропорциональное заданному рывку.
Наиболее высокие требования предъявляются к высокоскоростным лифтам,
обслуживающих специальные высотные сооружения. Характерным примером может служить
электропривод Останкинской телебашни (фирма AEG).
Безредукторная лебёдка L приводится в движение тихоходным дпт М1,
регулирование скорости которого производится по системе Г-Д. Для управления полем
генератора G используется реверсивный тиристорный возбудитель ТВ. Схема управления −
двухконтурная (регулятор скорости и регулятор тока). На входе регулятора скорости
сравнивается заданная скорость vрасч и действительная скорость. Кроме того, вводится
дополнительный сигнал коррекции по пройденному пути ∆s. Управление ЭП производится от
специализированной ЭВМ, которая выполняет логические операции (выбор направления,
пуск, стопорение, блокировки) и вычислительные операции.
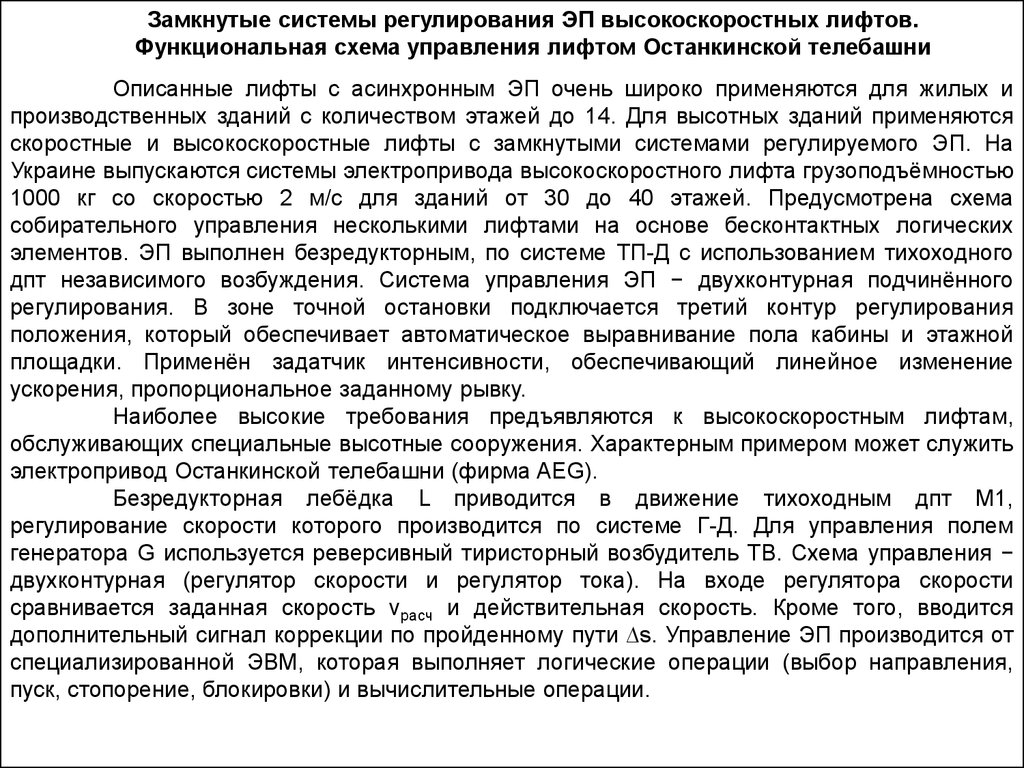
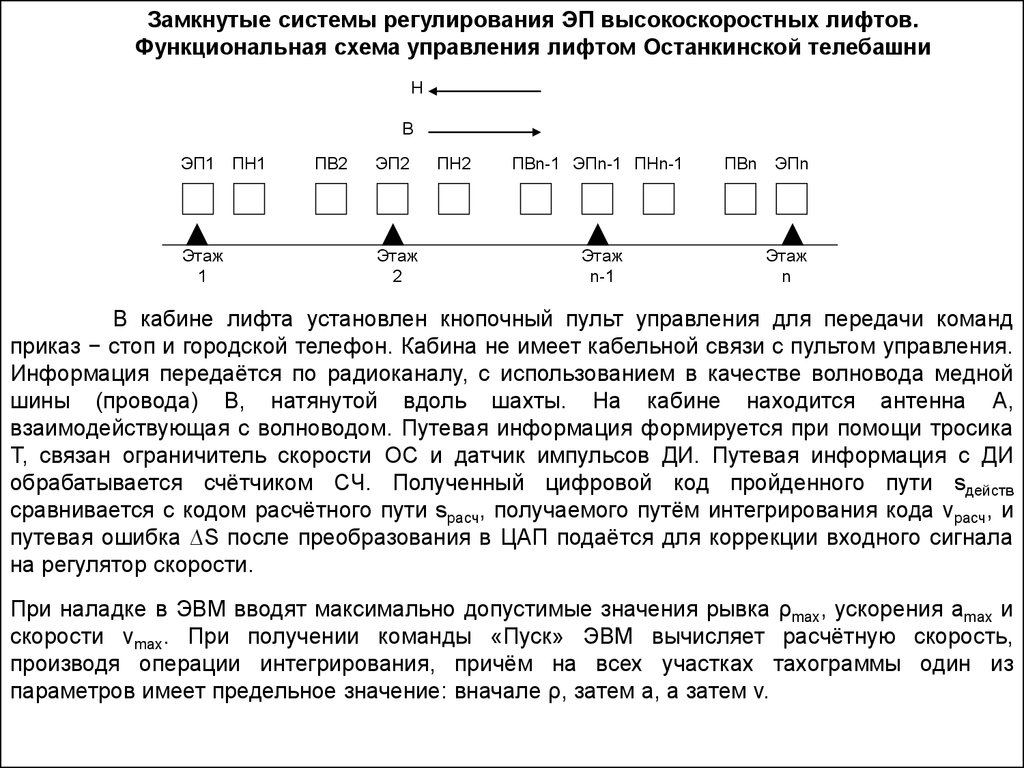
24.
Замкнутые системы регулирования ЭП высокоскоростных лифтов.Функциональная схема управления лифтом Останкинской телебашни
М2
+
LM1
-
BR
РС
LG
РТ
М
1
G
ТВ
Л
ОС
ДИ
ЦАП
ЦАП
S
расч
А В
Sд
К
СИ
Sрас
ч
расч
Т
СУ
max
аmax
П
max
Функциональная схема управления ЭП лифта Останкинской телебашни
25.
Замкнутые системы регулирования ЭП высокоскоростных лифтов.Функциональная схема управления лифтом Останкинской телебашни
Н
В
ЭП1
Этаж
1
ПН1
ПВ2
ЭП2
Этаж
2
ПН2
ПВn-1 ЭПn-1 ПНn-1
Этаж
n-1
ПВn
ЭПn
Этаж
n
В кабине лифта установлен кнопочный пульт управления для передачи команд
приказ − стоп и городской телефон. Кабина не имеет кабельной связи с пультом управления.
Информация передаётся по радиоканалу, с использованием в качестве волновода медной
шины (провода) В, натянутой вдоль шахты. На кабине находится антенна А,
взаимодействующая с волноводом. Путевая информация формируется при помощи тросика
Т, связан ограничитель скорости ОС и датчик импульсов ДИ. Путевая информация с ДИ
обрабатывается счётчиком СЧ. Полученный цифровой код пройденного пути sдейств
сравнивается с кодом расчётного пути sрасч, получаемого путём интегрирования кода vрасч, и
путевая ошибка ∆S после преобразования в ЦАП подаётся для коррекции входного сигнала
на регулятор скорости.
При наладке в ЭВМ вводят максимально допустимые значения рывка ρmax, ускорения amax и
скорости vmax. При получении команды «Пуск» ЭВМ вычисляет расчётную скорость,
производя операции интегрирования, причём на всех участках тахограммы один из
параметров имеет предельное значение: вначале ρ, затем a, а затем v.
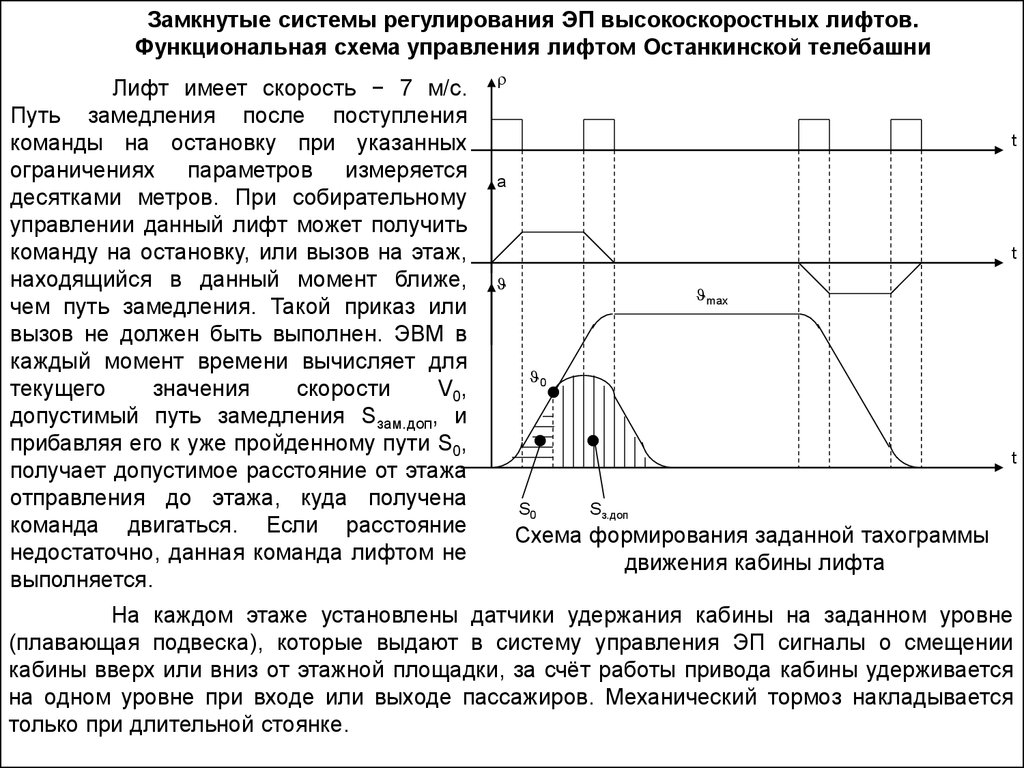
26.
Замкнутые системы регулирования ЭП высокоскоростных лифтов.Функциональная схема управления лифтом Останкинской телебашни
Лифт имеет скорость − 7 м/с.
Путь замедления после поступления
команды на остановку при указанных
ограничениях параметров измеряется
десятками метров. При собирательному
управлении данный лифт может получить
команду на остановку, или вызов на этаж,
находящийся в данный момент ближе,
чем путь замедления. Такой приказ или
вызов не должен быть выполнен. ЭВМ в
каждый момент времени вычисляет для
текущего
значения
скорости
V0,
допустимый путь замедления Sзам.доп, и
прибавляя его к уже пройденному пути S0,
получает допустимое расстояние от этажа
отправления до этажа, куда получена
команда двигаться. Если расстояние
недостаточно, данная команда лифтом не
выполняется.
t
а
t
max
0
t
S0
Sз.доп
Схема формирования заданной тахограммы
движения кабины лифта
На каждом этаже установлены датчики удержания кабины на заданном уровне
(плавающая подвеска), которые выдают в систему управления ЭП сигналы о смещении
кабины вверх или вниз от этажной площадки, за счёт работы привода кабины удерживается
на одном уровне при входе или выходе пассажиров. Механический тормоз накладывается
только при длительной стоянке.
27.
28.
29.
Шахтная подъёмная установка (ШПУ) в лифтовом режимеВ рудничных подъёмных установках существуют шахтные стволы, где
одновременно эксплуатируются от 8 до 12 горизонтов. Такие установки должны работать в
лифтовом режиме, который предполагает возможность разъезда между любыми
горизонтами, причём вызов клети на один горизонт и выбор горизонта назначения
производится с кнопочных постов, расположенных на рабочих участках горизонтов. Пуск
клети производится непосредственно из клети специальным рычажным устройством,
воздействующим на аппараты, установленные на площадке. Клеть не имеет связи с
машинным залом. Имеется известная общность между лифтовой и рудничной подъёмной
установкой и обычными лифтами. И в том, и в другом случае применены фрикционные
многоканатные подъёмны машины. И в том, и в другом случае используется схема
одноосный рабочий сосуд − противовес. Имеется одна и та же цепь управления, отработка
разъездов между любыми горизонтами. При этом требуются почти те же блокировки и те же
защиты. Однако, существуют и различия. В большинстве лифтов скорость не превышает 1.5
м/с. Самые скоростные лифты имеют скорость ниже 4 м/с. Технологическое ускорение,
замедление − не более 2 м/с2. Такие малые значения скорости и большие ускорения
обуславливают очень маленькие пути разгона и замедления. Для рудничных подъёмных
установок скорость при перевозке людей может достигать 12 м/с, а ускорение в рабочем
режиме не должно превышать 0.75 м/с2. Поэтому пути разгона и замедления очень велики, и
зачастую могут превышать расстояние между горизонтами. В этом случае машина не может
быть разогнана до максимальной скорости. С другой стороны, система должна обеспечивать
большую скорость при разъездах между далеко расположенными горизонтами во избежание
уменьшения производительности. Система программирования должна автоматически
выбирать оптимальную по производительности движения для каждой комбинации горизонт
отправления − горизонт назначения, то есть для каждого заданного перемещения клети в
предстоящем цикле.
30.
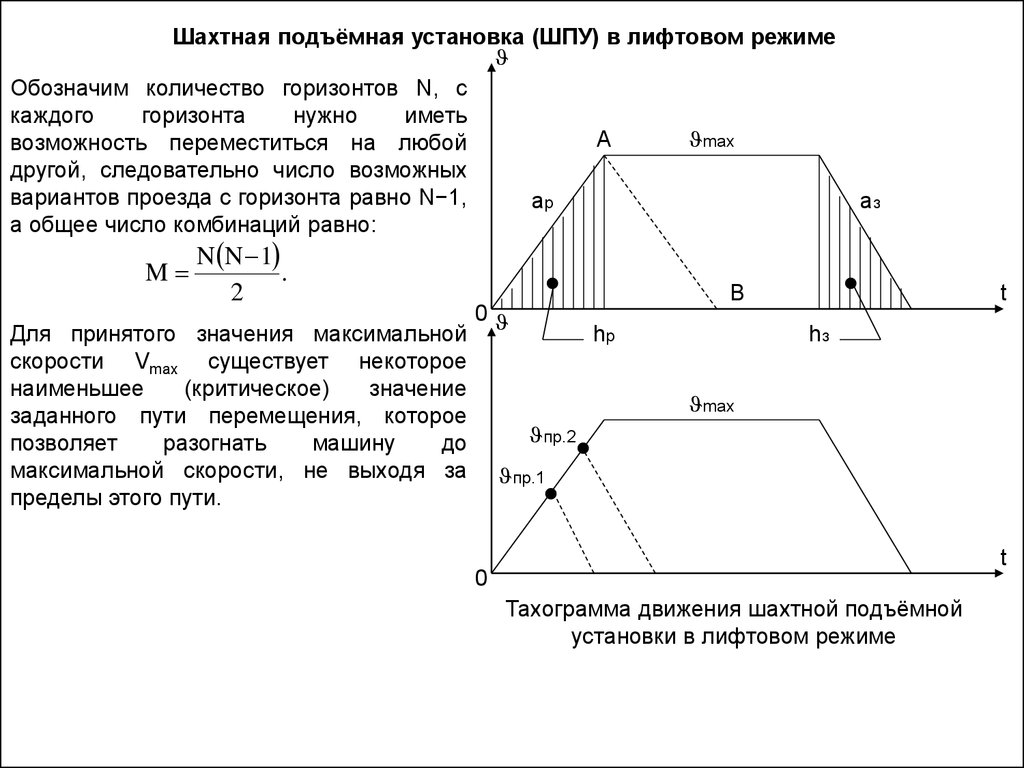
Шахтная подъёмная установка (ШПУ) в лифтовом режимеОбозначим количество горизонтов N, с
каждого
горизонта
нужно
иметь
А
max
возможность переместиться на любой
другой, следовательно число возможных
вариантов проезда с горизонта равно N−1,
ар
а общее число комбинаций равно:
M
N N 1
.
2
Для принятого значения максимальной
скорости Vmax существует некоторое
наименьшее
(критическое)
значение
заданного пути перемещения, которое
позволяет
разогнать
машину
до
максимальной скорости, не выходя за
пределы этого пути.
аз
В
0
hр
t
hз
max
пр.2
пр.1
t
0
Тахограмма движения шахтной подъёмной
установки в лифтовом режиме
31.
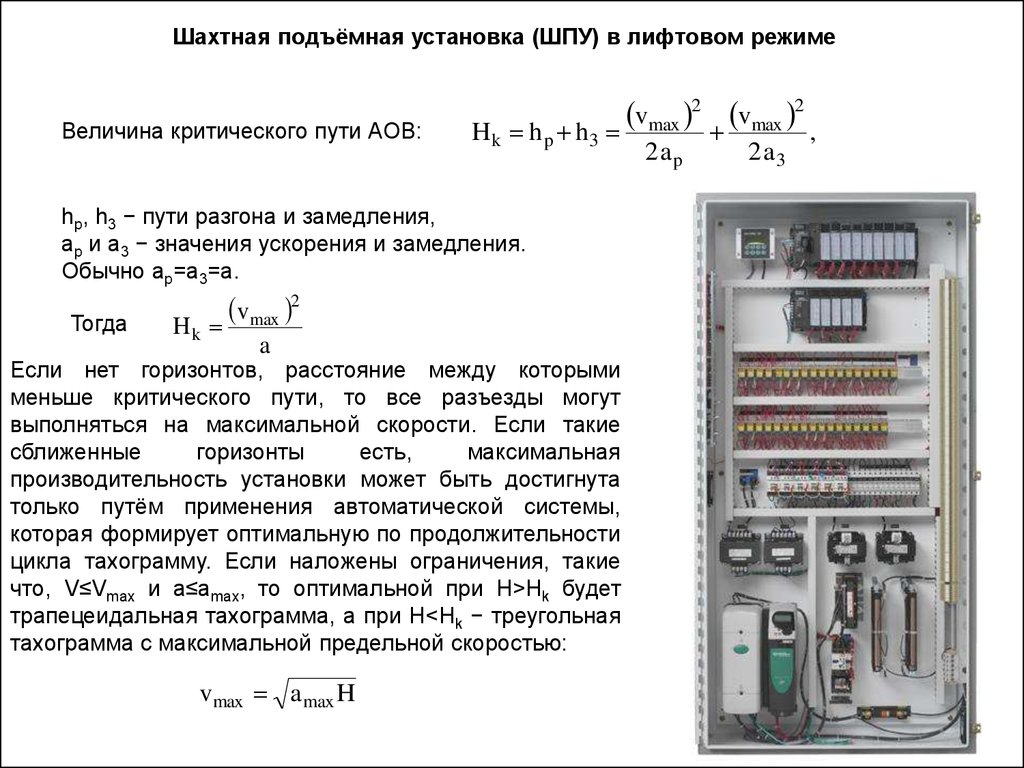
Шахтная подъёмная установка (ШПУ) в лифтовом режимеВеличина критического пути АОВ:
Hk h p h3
vmax 2 vmax 2
,
hp, h3 − пути разгона и замедления,
ар и а3 − значения ускорения и замедления.
Обычно ар=а3=а.
Тогда
Hk
v max 2
a
Если нет горизонтов, расстояние между которыми
меньше критического пути, то все разъезды могут
выполняться на максимальной скорости. Если такие
сближенные
горизонты
есть,
максимальная
производительность установки может быть достигнута
только путём применения автоматической системы,
которая формирует оптимальную по продолжительности
цикла тахограмму. Если наложены ограничения, такие
что, V≤Vmax и a≤amax, то оптимальной при H>Hk будет
трапецеидальная тахограмма, а при H<Hk − треугольная
тахограмма с максимальной предельной скоростью:
v max a max H
2ap
2 a3