










")
.)")
.)")


 сигнала")































 Электроника
ЭлектроникаПохожие презентации:










Радиотехнические цепи и сигналы. Классификация
1. Лекция 1 Радиотехнические цепи и сигналы Классификация
1Сигналом называют процесс изменения во времени
физического состояния какого-либо объекта, служащий для
отображения, регистрации и передачи сообщений.
В радиоэлектронике выделяют два аспекта рассмотрения
сигналов: информационный и энергетический.
Первый
связан с количеством и качеством информации в том
сообщении, которое несёт в себе передаваемый или
запоминаемый сигнал.
Пример: Сигнал цветного телевидения. Этот сигнал имеет сложную
информационную структуру, так как в передаваемом им сообщении о
каждом кадре должна содержаться информация:
а) о распределении яркости по экрану;
б) о распределении цвета по экрану;
в) о строчной, кадровой и цветовой синхронизации.
Второй
аспект, энергетический, связан с количеством и
видом энергии в передаваемом сообщении и её
распределением в пространстве.
Пример: Сигнал, излучаемый антенной радиолокатора. Это короткий
мощный электромагнитный импульс высокой частоты, излучаемый в
Самара,
узком секторе диаграммы направленности
антенны.
2. Лекция 1 Радиотехнические сигналы Понятие математической модели сигнала.
Лекция 1Радиотехнические сигналы
2
Понятие математической модели сигнала.
Для того чтобы сделать сигналы объектами теоретического
изучения и расчётов, следует указать способ их математического
описания, или создать математическую модель исследуемого сигнала.
Математическая модель является абстракцией, позволяющей
математически описать те свойства сигнала, которые представляются
как определяющие, наиболее важные, и игнорировать большое число
второстепенных признаков.
Один и тот же сигнал может быть представлен различными
математическими моделями, даже если эти модели имеют одинаковый
уровень абстракции. Функции, описывающие сигналы, могут
принимать как вещественные, так и комплексные значения.
Соответственно говорят о вещественных и комплексных сигналах.
Чаще всего в качестве математической модели используют
функциональную зависимость, аргументом которой является время.
Например, сигнал однотональной сигнализации на выходе устройства
охранной сигнализации может быть представлен моделью:
u(t) = Um sin(ωt + ϕ),t + ϕ),),
где Um – амплитуда напряжения на выходе; ωt + ϕ), = 2πf – круговая f – круговая
частота; ϕ), – начальная фаза.
Самара,
2020.
3. Лекция 1 Радиотехнические сигналы
3Одномерные и многомерные сигналы.
Рассмотрим напряжение на зажимах какой-либо цепи.
Такой сигнал, описываемый одной функцией времени u(t), принято
называть одномерным.
Множество одномерных сигналов образует многомерный сигнал.
Например, система напряжений на зажимах многополюсника
образует многомерный или векторный сигнал:
u(t) = {u1(t), u2 (t), ..., un (t)} ,
где целое число n называют размерностью сигнала.
Детерминированные и случайные сигналы.
Если математическая модель позволяет точно предсказать
мгновенные значения в любой момент времени, то сигнал называется
детерминированным. Строго говоря, чисто детерминированных
сигналов не существует, так как всегда есть множество неучтённых
факторов,
вызывающих
хаотическое
изменение
исследуемой
физической величины. Однако, если эти факторы вызывают лишь
незначительный разброс значений физической величины вблизи
предсказанного
моделью,
то
такой
сигнал
считают
детерминированным.
Сигнал, точное предсказание значений которого в любой момент
Самара,
времени невозможно, называют случайным.
2020.
4. Лекция 1 Радиотехнические сигналы
4Непрерывные и импульсные сигналы.
Если сигнал описывается непрерывной функцией времени s(t), то
его называют непрерывным.
Очень важный для радиотехники класс сигналов представляют
собой импульсы, которые существуют лишь в пределах конечного
отрезка времени.
Самым замечательным для импульсных сигналов является то, что
они позволяют получить колебания значительной интенсивности во
время действия импульса при весьма умеренной средней мощности
передатчика.
Различают видеоимпульсы (рис. 1, а) и радиоимпульсы (рис. 1, б).
а
Самара, скважностью импульсов.
Отношение τ/T называют скважностью импульсов.T называют
2020.
б
5. Лекция 2 Принцип суперпозиции в радиоэлектронике Представление произвольного сигнала в виде суперпозиции элементарных сигналов
Лекция 26
Принцип суперпозиции в радиоэлектронике
Представление произвольного сигнала в виде
суперпозиции элементарных сигналов
Радиоэлектронное устройство независимо от своего
назначения и уровня сложности представляет собой систему,
т.е. упорядоченную совокупность физических объектов,
между которыми существуют определённые взаимодействия.
В структуре системы можно выделить вход, на который
подаётся исходный сигнал, и выход, откуда снимается
преобразованный сигнал.
Если интересуются лишь связью между сигналами на
входе и выходе и не описывают внутренние процессы в
системе, то говорят, что система представляет собой "чёрный
ящик".
Связь между входным и выходным сигналом задают
системным оператором T :
6. Лекция 2 Принцип при анализе радиоэлектронных систем
Лекция 27
Принцип при анализе радиоэлектронных систем
Все возможные системы можно разделить на
стационарные и нестационарные.
Система стационарна, если её входная реакция не
зависит от того, в какой момент времени поступает входной
сигнал. Математически
это
что из равенства
t означает,
S вых
T S вх t
S вых t t 0 T S вх t t 0
t следует, что
при любом
.
Стационарные системы называют также системами с
постоянными во времени внутренними параметрами.
Если же свойства системы не инвариантны
относительно выбора начала отсчёта времени, то такую
систему называют нестационарной (системой с переменными
во времени параметрами или параметрической системой).
Все возможные системы можно также разделить на
линейные
T Sвх1 t и Sнелинейные.
вх 2 t TS вх1 t TS вх 2 t ,
Линейная система – это система, оператор T которой
T Sвх t TS вх t .
линеен:
К
линейной системе применим
7. Лекция 2 Примеры радиоэлектронных систем
Пример 1:Пример 2:
Пример 3:
8
8. Лекция 2 Принцип суперпозиции при анализе радиоэлектронных систем
9Справедливость принципа суперпозиции для
линейных систем открывает прямой путь к
систематическому решению задач о прохождении
сложных сигналов через такие системы. Для этого
следует исследуемый сигнал представить в виде
суммы однотипных элементарных сигналов. Если
удастся тем или иным способом найти реакцию на
выходе,
возникающую
под
воздействием
элементарного сигнала на входе, то окончательным
этапом решения задачи явится суммирование таких
реакций.
Элементарные сигналы, используемые в
радиоэлектронике для этой цели:
1. Функция включения или функция Хевисайда.
2. Дельта-функция Дирака.
3. Вещественный гармонический сигнал.
4. Комплексный гармонический сигнал.
9. Лекция 2 Принцип суперпозиции при анализе радиоэлектронных систем. Сигналы.
Функция включения или функция ХевисайдаДельта-функция Дирака
10
10. Лекция 2 Принцип суперпозиции при анализе радиоэлектронных систем. Сигналы.
Вещественный гармонический сигнал11
11. Лекция 2 Принцип суперпозиции при анализе радиоэлектронных систем. Сигналы.
Комплексный гармонический сигнал.Обобщенный гармонический сигнал
12
12. Лекция 3 ПРЕДСТАВЛЕНИЕ ПРОИЗВОЛЬНОГО СИГНАЛА С ПОМОЩЬЮ ФУНКЦИЙ ВКЛЮЧЕНИЯ σ(t − τ)
13Ступенчатая аппроксимация приводит нас к
приближённому представлению s(t) в виде суммы:
Рис. 3.1
Если теперь устремить Δ к нулю, то дискретную переменную
k Δ можно заменить на непрерывную τ . При этом
sмалые
k sk 1
приращения
s
превращаются в дифференциалы,
а вместо суммы мы
s t s0 t t dt
приходим к
t
0
13. Лекция 3 ПРЕДСТАВЛЕНИЕ ПРОИЗВОЛЬНОГО СИГНАЛА С ПОМОЩЬЮ δ-ФУНКЦИЙ δ (t – τ).)
14Рис. 3.2
Элементарный импульс на k-м отсчёте равен:
Тогда сигнал s (t) может быть приближённо представлен в
виде суммы:
Переходя к пределу при Δ → 0, будем иметь интеграл вместо
суммы, вместо дискретных значений t k непрерывную
переменную интегрирования τ , а
14. Лекция 3 ПРЕДСТАВЛЕНИЕ ПРОИЗВОЛЬНОГО СИГНАЛА С ПОМОЩЬЮ δ-ФУНКЦИЙ δ (t – τ).)
15Выводы:
Если непрерывную функцию умножить на δ-функцию и
произведение проинтегрировать по времени, то результат
будет равен значению непрерывной функции в той точке, где
сосредоточен δ-импульс. Это замечательное свойство δфункции.
Попутно мы получили ещё один результат:
т.е. δ-функция есть результат дифференцирования
ступенчатой функции Хевисайда.
15. Лекция 3 ПРЕДСТАВЛЕНИЕ ПРОИЗВОЛЬНОГО СИГНАЛА С ПОМОЩЬЮ ГАРМОНИЧЕСКИХ СИГНАЛОВ Спектральный анализ периодических сигналов
Лекция 316
ПРЕДСТАВЛЕНИЕ ПРОИЗВОЛЬНОГО СИГНАЛА С ПОМОЩЬЮ
ГАРМОНИЧЕСКИХ СИГНАЛОВ
Спектральный анализ периодических сигналов
Ряд Фурье
Рассмотрим вещественный периодический сигнал s(t) с
периодом Т.
Введём понятие энергии сигнала на заданном отрезке
времени [t1, t2] следующим образом:
(3.1)
В частности, энергия периодического сигнала за период Т
есть интеграл:
(3.2)
В спектральном анализе показано, что периодический
(3.3)
сигнал с ограниченной энергией за период Т может быть
представлен в виде ряда Фурье:
,
16. Лекция 3 Ряд Фурье Спектральный анализ периодических сигналов
Лекция 3Ряд Фурье
17
Спектральный анализ периодических сигналов
В выражении (3.3)
гармоникой:
называется основной
(3.3)
Колебания с номерами n = 2, 3, … называют высшими
гармониками,
а
− постоянной составляющей сигнала.
Проведя тригонометрические преобразования, можно
(3.4)
из выражения
получить другую форму ряда Фурье:
где
− амплитуда n-й гармоники;
− фаза n-й
гармоники.
В соответствии с (3.4) исходный сигнал s, представленный
17. Лекция 3 Спектральный анализ периодических сигналов Спектральные диаграммы (амплитудная и фазовая) сигнала
Лекция 318
Спектральный анализ периодических сигналов
Спектральные диаграммы (амплитудная и
фазовая)
сигнала
Рис. 3.3
Интерес представляет амплитудная диаграмма, которая
позволяет судить о процентном содержании тех или иных
гармоник в спектре периодического сигнала.
18. Лекция 3 Спектральный анализ периодических сигналов Пример прямоугольных импульсных сигналов
Лекция 319
Спектральный анализ периодических сигналов
Пример прямоугольных импульсных сигналов
Периодическая последовательность прямоугольных
видеоимпульсов с амплитудой А и длительностью τ.
Рис. 3.4
Для нее:
скважность импульсов;
где
–
19. Лекция 3 Спектральный анализ периодических сигналов Пример прямоугольных импульсных сигналов
Лекция 320
Спектральный анализ периодических сигналов
Пример прямоугольных импульсных сигналов
Окончательно получаем:
(3.5)
Амплитудный спектр этого сигнала имеет характер функции
:
Следует отметить, что 90 % энергии импульса s(t)
переносится гармониками от 0 до
(граница первого лепестка функции
).
Рис. 3.5
20. Лекция 4 Комплексная форма ряда Фурье периодического сигнала
Лекция 421
Комплексная форма ряда Фурье периодического
сигнала
Вместо элементарных сигналов sin(nωt + ϕ),1t)
использованных в ряде Фурье:
и cos(nωt + ϕ),1t),
(3.3)
для спектрального разложения произвольного периодического
сигнала с ограниченной энергией за период Т можно
e jnw1t
использовать комплексные
гармонические сигналы
.
Применив формулы Эйлера перепишем ряд (3.3) в
следующем виде:
a0 e jnw1t e jnw1t
e jnw1t e jnw1t
.
s t an
bn
(4.1)
2
an
Введем
Cn вместо
для
an jbn
C n*
Величины
2
C n
индексах
n
нечетны
2
n 1
2j
bn
и
Cn
an jbn
2
n 1, 2, 3, ....
новые коэффициенты n
a
b
n
можно определить и nпри отрицательных
, причем:
, поскольку
коэффициенты
jnw1t
s t Cn e
. (4.2)
n
четны, а
T 2
1
можно
s t e jnw1t dt .
относительно индексов. То суммирование вCn(4.1)
T T 2
распространить на все значения
положительные и
(4.3)
21. Лекция 4 Разложим в комплексный ряд Фурье прямоугольный импульс.
Лекция 422
Разложим в комплексный ряд Фурье прямоугольный импульс.
Из (4.3) :
.
Тогда из (4.2) :
(4.4)
.
Из (4.4) получаем амплитудный спектр:
Сравнивая последний рисунок с рисунком на слайде 20, видим,
что в спектре появились отрицательные частоты, зато
22. Лекция 4 Понятие отрицательных частот
23Лекция 4
Понятие отрицательных частот
Спектральная диаграмма периодического сигнала ,
представленного в комплексной форме, будучи симметричной
относительно начала отсчета частоты, содержит компоненты на
отрицательной полуоси частот:
Понятие отрицательной частоты
e jw1t нуждается
e jw1t
cos w1t
.
в некотором обсуждении.
2
Рассмотрим тождество:
В соответствие
1 2 e jwс1t методом комплексных амплитуд
слагаемое
на комплексной плоскости
wt
отображается вектором ½, который
вращается
скоростью
1 2 e jw1t
в направлении увеличения полярного угла
.
Вектор, соответствующий слагаемому
отличается
w1
с
угловой
,
противоположным направлением вращения Складываясь эти
два комплексных
числа образуют вещественное число.
23. Лекция 4 Проблема различения полезного сигнала на фоне шумов Отношение сигнал/шум
Лекция 4Проблема различения полезного сигнала на
фоне шумов
Отношение сигнал/T называют скважностью импульсов.шум
24
В реальных условиях передача и обработка
радиотехнических сигналов всегда сопровождается шумом –
паразитным случайным сигналом различной природы.
Если энергия шума превышает энергию полезного
сигнала, то выделение полезной информации становится
сложной задачей. Поэтому при разработке и реализации любой
РЭС принимаются все меры, чтобы обеспечить превышение
сигнала над уровнем шума. Результат предпринятых мер
С Ш 10 дБ
характеризуется отношением
сигнал/T называют скважностью импульсов.шум на выходе РЭС, под
которым понимают отношение мощностей Рс и Рш.
Очень часто отношение сигнал/T называют скважностью импульсов.шум измеряют в
С Ш дБ 10 lg Pc Pш
(4.1)
децибелах:
С Ш 20 дБ
Например,
Pc Pш 100
означает, что
.
Ясно, что при таком отношении сигнал/T называют скважностью импульсов.шум полезная
информация почти не "засорена" шумами. Именно такое
С Ш 10 дБ
значение 20 дБ принято для обеспечения качественного приёма
сигналов радиовещания.
24. Лекция 4 Меры, принимаемые при разработке и реализации РЭС для повышения С/Ш на выходе системы. Грамотный выбор полосы
Лекция 425
Меры, принимаемые при разработке и реализации
РЭС для повышения С/T называют скважностью импульсов.Ш на выходе системы.
Грамотный выбор полосы пропускания РЭС.
1
Если выбрать в качестве рабочей полосу частот от нуля до
,
то 90 % энергии входного импульса пройдёт на выход. Потеря
10 % – это высокочастотные составляющие спектра.
Их отсутствие на выходе скажется на форме выходного
импульса:
25. Лекция 4 Повышение С/Ш на выходе РЭС. Грамотный выбор полосы пропускания РЭС.
Лекция 4Повышение С/T называют скважностью импульсов.Ш на выходе РЭС.
Грамотный выбор полосы пропускания РЭС.
26
1
При этой полосе на выход пройдут и шумы, занимающие спектр
от нуля до
.
В итоге будем иметь на выходе некоторое отношение:
Pc Pш
сигнал/T называют скважностью импульсов.шум =
.
Увеличим теперь вдвое полосу рабочих частот системы.
При этом на выход пройдёт уже 95 % энергии входного сигнала,
и форма выходного импульса улучшиться (фронты станут
круче).
Однако шум на выходе теперь станет вдвое больше
Pc Pш "белого " шума, имеющего
(рассматривается случай
равномерный спектр от нуля до бесконечно высоких частот).
В итоге, в отношении
числитель увеличится на 5
%, тогда как
1
знаменатель увеличится вдвое. В результате, отношение
26.
27. Инвариантный измерительный мост Нестерова В.Н.
Пат. 1795375 РФ1. Сигнал на выходе устройства деления 9 определяется
выражением:
*
z1 z z 4 z 2 z z 3
k1
U
1
F1 *
U 2 k 2 z 5 z1 z z 2 z z 3 z 4
2. Приk1 k 2
:
z1 , z 2 z 0
(1)
*
z
z 3 z 4 z 5, z F1 U *1
(2)
z
z
0
U2
28. Методика реализации технологического метода
Аналитическое выражение погрешности от влияющихфакторов:
F 1
z 30 z 1 z 0 z 2 z 0 z 40
k10 k 20
z
z 50 z1 z 0 z 30 z 2 z 0 z 40
z 30
z1
0
z z 3 z 40 z 2 z 0 z1 z 0 z 30
z1
z 2 z 0 z 40
z1 z 0 z 30
z
4
z 40
(1)
z 2 z
z 2 z 0
z1 z z 3
z 1 z 0 z 40 z 2 z 0 z30
z 2 z 0 z 40
z 1 z 0 z30 z 2 z 0 z 40
z 1 z 0 z 30
z 5
z 50
Аналитическое выражение второго признака
технологического
метода:
z
z1
z1 z 0
z 0; z
z z
3
30
4
40
z z z 0; k k
z z z z k k
z 2 z
1 z
0;
z 2 z 0
1
0
3
1
5
10
50
3
20
2
0.
(2)
Условия инвариантности, достигаемые технологическими мероприятия
z1 z
z z
1
0
z 3 ;
z
30
z
z
4
40
z 2 z
;
z1 z z 3
z z z z z
2
0
1
0
3
z 5
z
50
z 2 z z 4
z z z
2
0
4
;
k1 k 2
. (3)
k10
k 20
29. Двухканальный неравновесный измерительный мост с одним рабочим плечом
Пат.2071064 РФТехнологические условия
инвариантности:
Выражение погрешности:
F1
k10
k 20
z 40 z1 z 0 z 20 z 30 k1 k 2
z 30 z 20 z 40
k10 k 20
z1 z z 3
z 40
z1 z 0
z 30 z 20 z 40
z
z
z
30
0
1
z 20 z 30 z1 z 0 z 4 z 2
,
z 20 z 40
z 40 z 20
k1 k 2
k10
k 20
(1)
z1 z z 3
z1 z 0 z 30
z 2 z 4
z 20
z 40
(2)
30. Двухканальный измерительный мост с принудительной балансировкой
Пат.2072730 РФ31. Выражение погрешности от действия влияющих факторов
F3r20 r40 r1 r 0 r30 k1
r20 r30 r40
k
10
k 2
k 20
r1 r 0 r30
r
r
r
20 30 40
r2 r1 r r30 r40 r1 r 0 r20 r4 r3
2
r30
r20 r30 r40
r40
r20 r1 r 0
(1)
Технологические условия инвариантности:
k1 k 2
k10
k 20
(2)
r1 r r2
r1 r 0 r20
(3)
r3 r4
r30
r40
(4)
32. Двухканальный неравновесный последовательно-симметричный мост
Пат.2071063 РФ33. Выражение погрешности от действия влияющих факторов
kF4 10
k 20
z 40 z1 z 0 z 20 z 3 z 0 k1 k 2
z 20 z 40 z1 z 0 z 3 z 0 k10 k 20
z1 z 0 z3 z 0 z1 z z3 z
z 20 z 40
2
2
z
z
z
z
z1 z 0 z3 z 0 1
z 20 z 40
3
0
0
z 4 z 2
z
z 20
40
(1)
Технологические условия инвариантности:
k1 k 2
k10
k 20
(2)
z1 z z 3 z
z1 z 0 z 3 z 0
(3)
z 2 z 4
z 20
z 40
(4)
34. Двухканальный неравновесный измерительный мост с четырьмя рабочими плечами
Пат.2068550 РФТехнологические условия инвариантности:
k1 k 2
(1)
k10 k 20
z1 z z 3 z
z1 z 0 z 3 z 0
z 2 z z 4 z
z 2 z z 4 z 0
(3)
(2)
35. Двухканальный делитель напряжения с одним рабочим плечом
Пат.2121148 РФk z z 0
F6 10 1
k 20
z 20
k 2 k1 z 2 z1 z
k 20 k10 z 20 z1 z 0
Технологические условия инвариантности:
k 2 k1
k 20
k10
(2)
z 2 z1 z (3)
z1 z 0
z 20
(1)
36. Двухканальный делитель напряжения с дополнительным сумматором в цепи одного из каналов
Пат.2118826 РФ37. Выражение погрешности от действия влияющих факторов
r30 z1 z 0 k1 k2 z1 z z2F7
r10
z20
k0
z1 z 0 z20
(1)
r3 r2
r1 r3
z20
,
r30 r20 z1 z 0 r10 r30
Технологические условия инвариантности:
k1 k2
k10 k10
(2)
z1 z z2
z1 z 0 z20 (3)
r1 r2 r3
r10 r20 r30
(4)
38. Двухканальный делитель напряжения с дифференциальным первичным преобразователем
39. Выражение погрешности от действия влияющих факторов
k10 z1 z 0 k1 k2 z1 z z1 z2F8
k20
z0
k
k
z
z
z
20 1
0
0
10
(1)
Технологические условия инвариантности:
k1 k2
k10 k20
(2)
z1 z z1 z2
z1 z 0
z0
(3)
40. Двухканальный делитель напряжения с перекрестными обратными связями
Пат.1795375 РФ41. Выражение погрешности от действия влияющих факторов
z z 0 z z 0 k1k 2 z z z z r1 r2
F9
2
2 r0
k10 k 20 z z 0 z z 0 r10 r20
z z 0 r4 r3 z z 02 z z 0 z z 0
4 r0 r40 r30 8 r02
4 r02
(1)
r6 r5 z z 02 r7 r5 z z 02 z z 0 z z 0 r7 r6
2
2
2
r
r
8
r
r
r
8
r
4
r
r
r
50
0
50
0
0
60
60
70
70
Технологические условия инвариантности:
k1 k2
(2)
k10 k20
z z z z
z z 0 z z 0 (3)
r1 r2
(4)
r10 r20
r3 r4
(5)
r30 r40
r5 r6 r7
r50 r60 r70
(6)
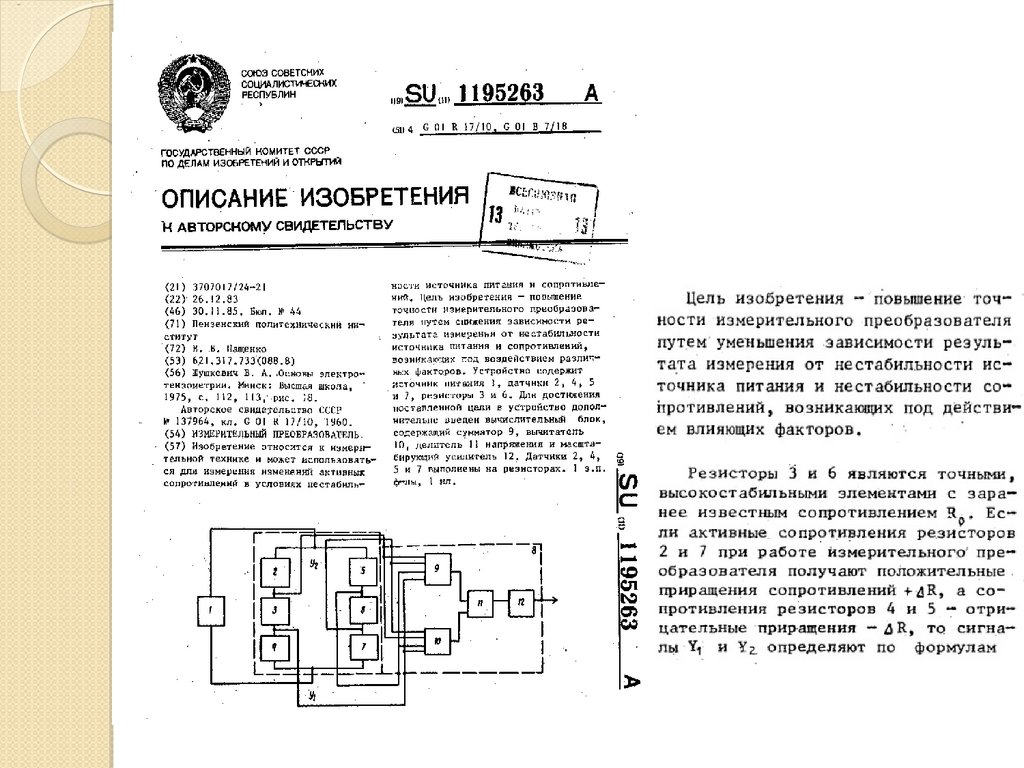
42. Измерительный преобразователь на основе шестиплечего моста
Нестеров В.Н. Инвариантные измерительные мосты для измерениякрутящего момента /T называют скважностью импульсов./T называют скважностью импульсов. Метрология.-1992.-№12.-с.28-36.
43. Реализация технологического метода для дифференциального преобразователя
RR
R12
10
12
1
U 3 U 1
U
2
R9 R10 R11
R11
где
,
R9, R10 R,11 R12
(1)
- сопротивления, соответственно, резисторов
44. Реализация методики технологического метода для дифференциального преобразователя
1. Выражение погрешностиU 3
U 3
U 3
U 3
U 3
U 3
R9
R10
R11
R9
R12
R9
R10
R11
R9
R12
(1)
U 1 R9 R10 2 1 R12 R10 R9 R12 U 1 R10 U 2 R12 R11
R9 R10 R11 R10 R9 R11 R9 R10 R12 R11
2. Аналитическое выражение второго признака
технологического метода:
R12 R11
R10 R9
(2)
0
0
R11
R12
R9
R10
(3)
3. Технологические условия
инвариантности:
R10 R9
R10
R9
(4)
R12 R11
R12
R11
(5)
45. Выводы
Анализ полученных технологических условийинвариантности
технологические
позволяет
мероприятия,
выявлять
касающиеся
соответствующих групп элементов рассмотренных
преобразователей,
позволяющие
осуществить
компенсацию действующих на них возмущающих
факторов.
В общем виде они могут быть представлены
следующими формулировками:
элементы, составляющие группу, должны быть
технологически идентичны, например, выполнены
из одного и того же материала, изготовлены на
основе
идентичных
одной партии и т.д.;
комплектующих,
взяты
из
46. Выводы
Сформулированные общие требования могутбыть уточнены и развернуты применительно к
конкретным
техническим
определенных
решениям
эксплуатационных
и
для
условий,
составив при этом предмет технологического «ноухау».
Например,
использованные
напряжения,
активные
в
преобразователи,
схемах,
(повторители
дифференциальные
усилители,
сумматоры, масштабные усилители) должны быть
построены на основе одинаковых операционных
усилителей, взятых из одной партии. При наличии
навесных
элементов,
однотипные
элементы
47.
48.
49. Выражение погрешности от действия влияющих факторов на элементы шестиплечего моста
50.
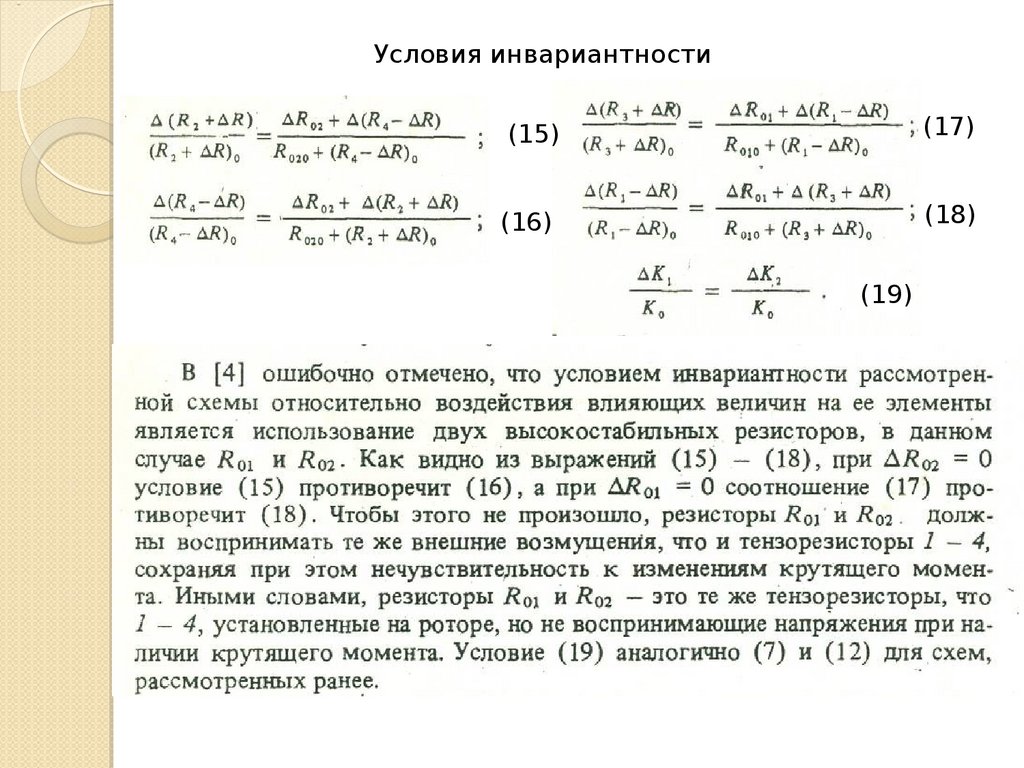
Условия инвариантности(15)
(17)
(16)
(18)
(19)