













 Промышленность
ПромышленностьПохожие презентации:




. Лекция 4")



")

Системы управления двустороннего действия для копирующих манипуляторов
1.
БГТУ «ВОЕНМЕХ» им. Д.Ф. УстиноваСистемы управления двустороннего действия для
копирующих манипуляторов
Н.С. Слободзян, Е.Б. Коротков, Н.Г. Яковенко, В.Д. Грагерт
Докладчик: Грагерт Владимир Дмитриевич, младший научный сотрудник
научно-исследовательской лабораторией «Робототехнические и мехатронные
системы».
2.
Копирующие манипуляторы: назначение и области примененияМалоинвазивные медицинские операции
Атомная, химическая, медицинская
промышленность
Саперные операции
2
3.
Копирующий манипулятор. Основные характеристикиХарактеристика
Номинальное значение
Кинематические и динамические характеристики
6
(3 поступательных
и 3 вращательных)
7
Количество степеней свободы рабочего органа
Количество степеней подвижности ИУ
Номинальные значения развиваемых линейных скоростей рабочего органа
0,03 м/с
Грузоподъемность на максимальном вылете рабочего органа ИУ
15 кг
Грузоподъемность в ограниченной зоне повышенной грузоподъемности
30 кг
Момент вращения болтовых соединений
30 Нм
Усилие максимального сжатия силового захватного устройства
150 Н
Электрические характеристики
Напряжение питания
Мощность потребления, не более
230 В (±10 %) / (50±0,5) Гц.
3,5 кВА
3
4.
Исполнительное устройство. Общий вид4
5.
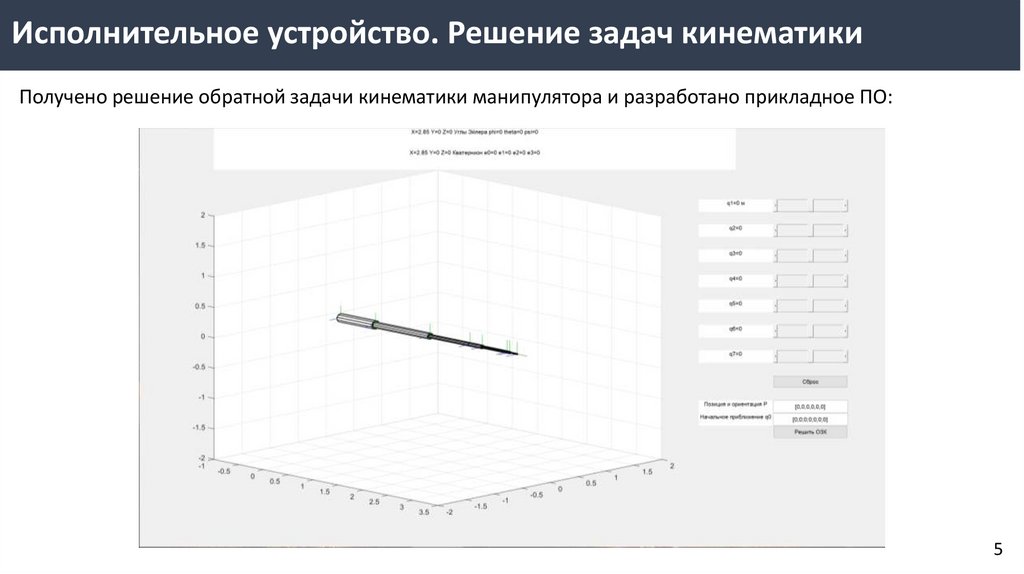
Исполнительное устройство. Решение задач кинематикиПолучено решение обратной задачи кинематики манипулятора и разработано прикладное ПО:
5
6.
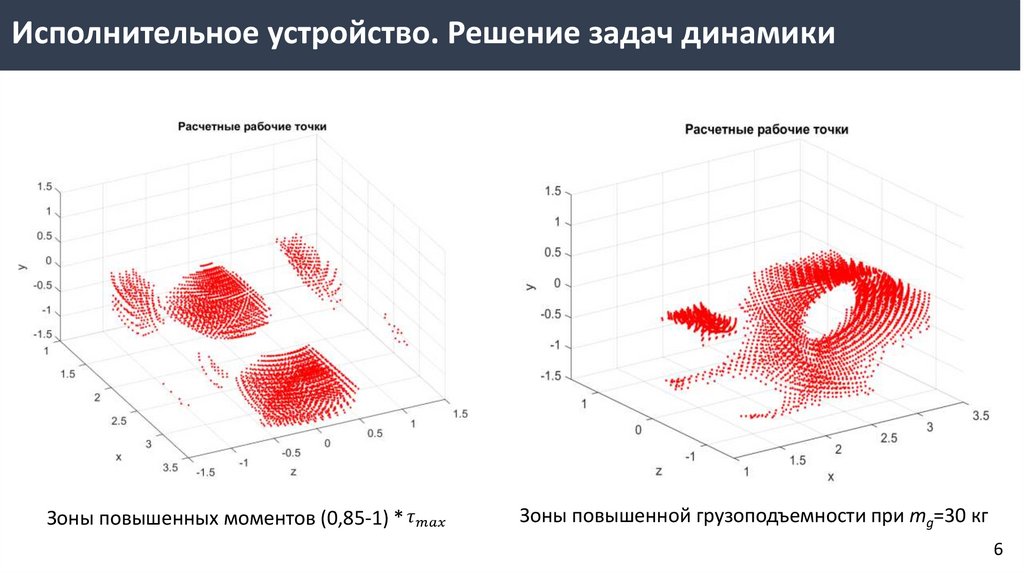
Исполнительное устройство. Решение задач динамикиЗоны повышенных моментов (0,85-1) *