










 Физика
Физика Механика
МеханикаПохожие презентации:










Техническая механика. Кинематические характеристики движения
1.
Техническая механика2.
Раздел «Теоретическая механика»Кинематические характеристики
движения
3.
Цель: изучение способов описания движения.План
1. Повторений основных понятий кинематики.
2. Изучение ускорений точки.
3. Изучение характеристик вращательного
движения.
4. Знакомство с плоским движением.
4.
Кинематика - раздел механики, в которомизучается мех. движение тел без рассмотрения
причин движения.
Основная задача кинематики - нахождение
положения тела в любой момент времени,
описание движения тела.
5.
1. Основные понятиякинематики
6.
Материальная точка - тело, размерами которого вданных условиях можно пренебречь.
1. Система отсчета - это система координат,
связанная с телом отсчета и способом измерения
времени.
При измерении времени различают промежуток
времени Δt, момент времени t, начальный момент
времени t0.
7.
2. Линия, которую описывает движущееся тело вопределенной СО, называется траекторией.
3. Путь s - длина траектории; s > 0.
4.Перемещение тела - вектор, соединяющий
начальное и конечное положение тела.
5. Радиус-вектор -вектор,
соединяющий начало
отсчета О с точкой.
8.
Способы задания движения точки:1.векторный,
2.координатный,
3.естественный.
9.
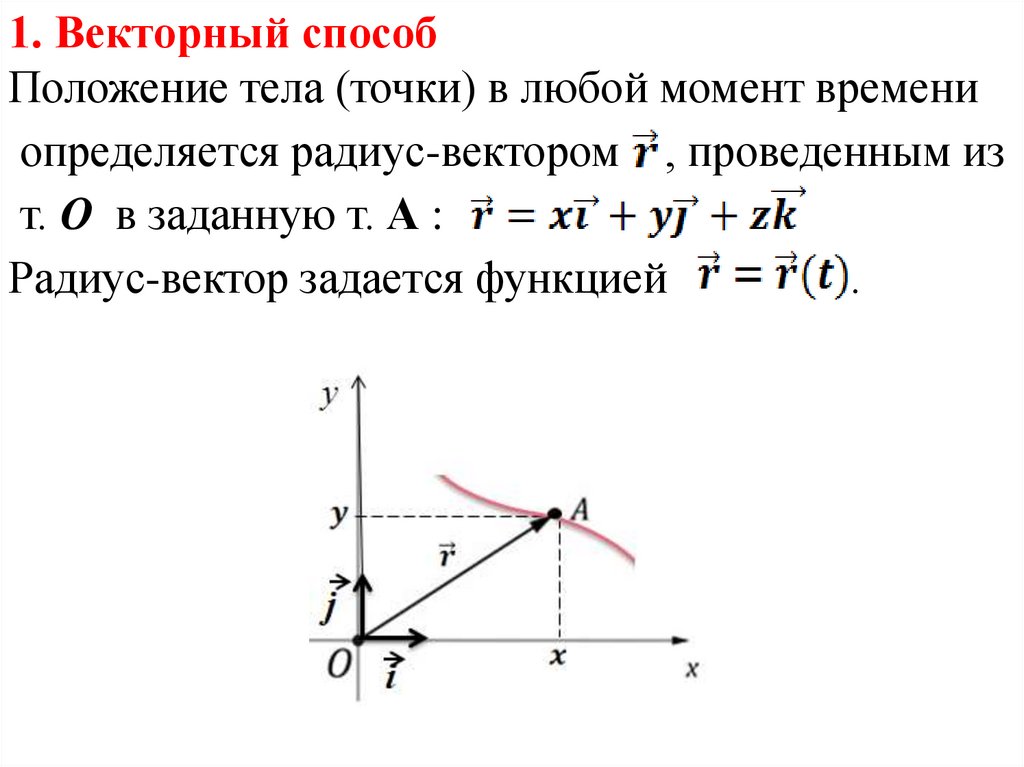
1. Векторный способПоложение тела (точки) в любой момент времени
определяется радиус-вектором , проведенным из
т. О в заданную т. А :
Радиус-вектор задается функцией
.
10.
2. Координатный способДвижение точки задается с помощью координат
как функций времени:
x = x(t), у = у(t), z = z(t).
3. Естественный способ
Определяется положение точки по траектории как
функция пути от времени
s = f(t).
Известна траектория и уравнение движения точки
по траектории.
11.
2. Скорость12.
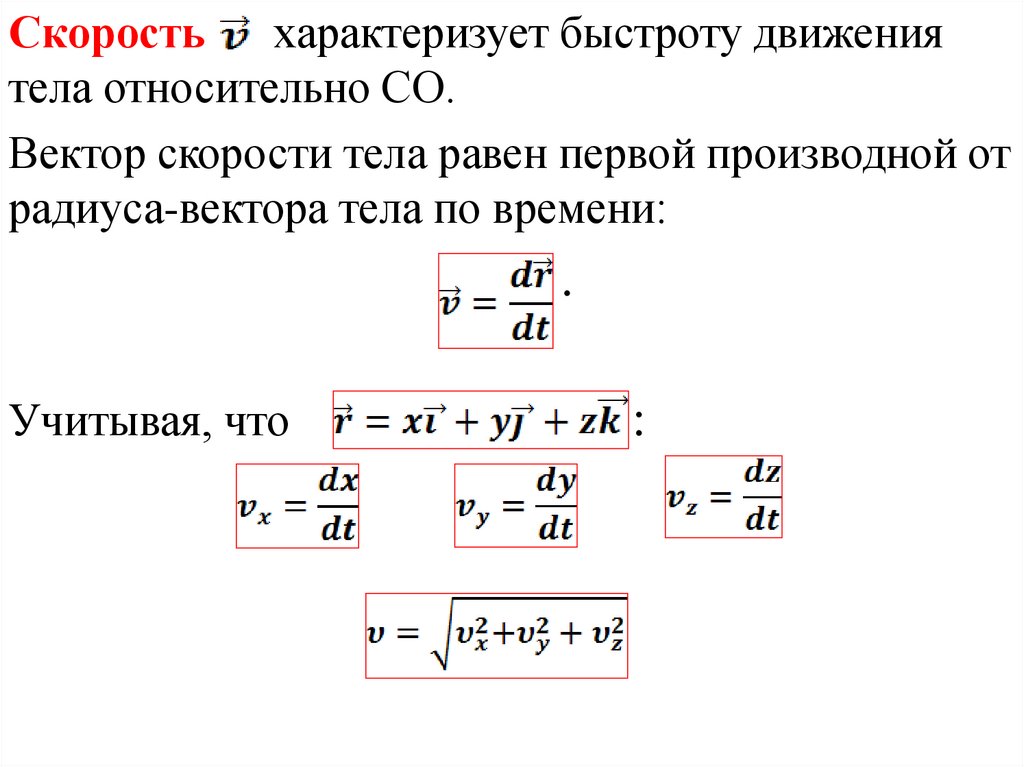
Скорость характеризует быстроту движениятела относительно СО.
Вектор скорости тела равен первой производной от
радиуса-вектора тела по времени:
.
Учитывая, что
:
13.
На основе уравнения пути скорость определяетсякак первая производная пути по времени:
.
Вектор скорости направлен по касательной к
траектории.
14.
3. Ускорение15.
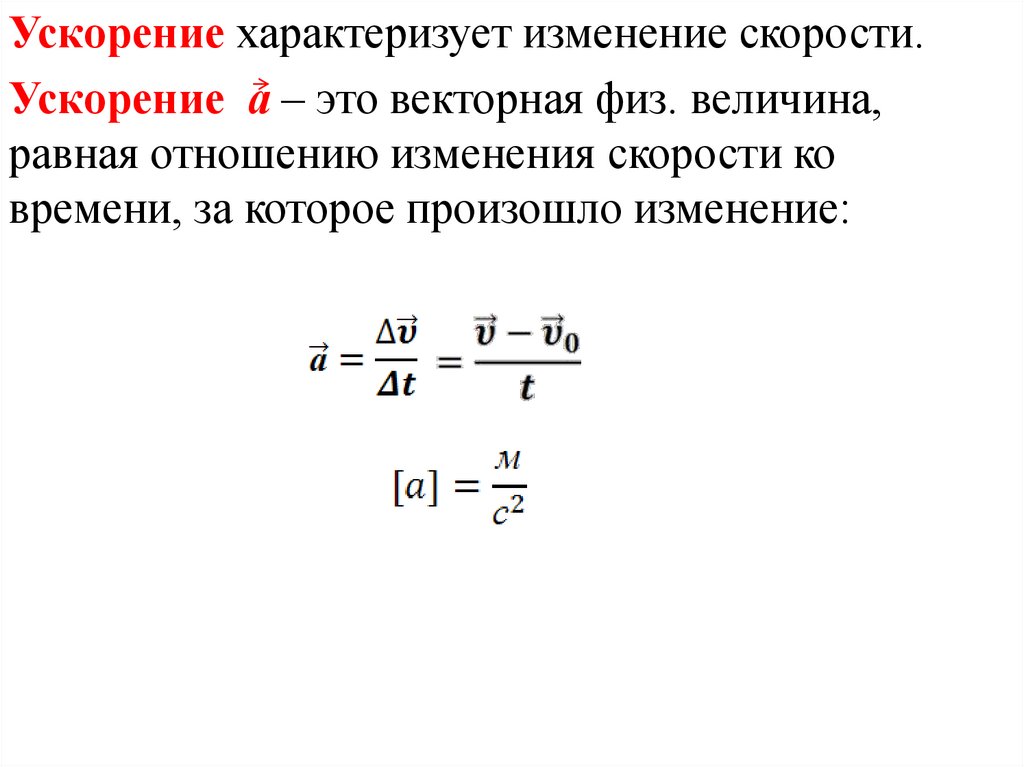
Ускорение характеризует изменение скорости.Ускорение а – это векторная физ. величина,
равная отношению изменения скорости ко
времени, за которое произошло изменение:
16.
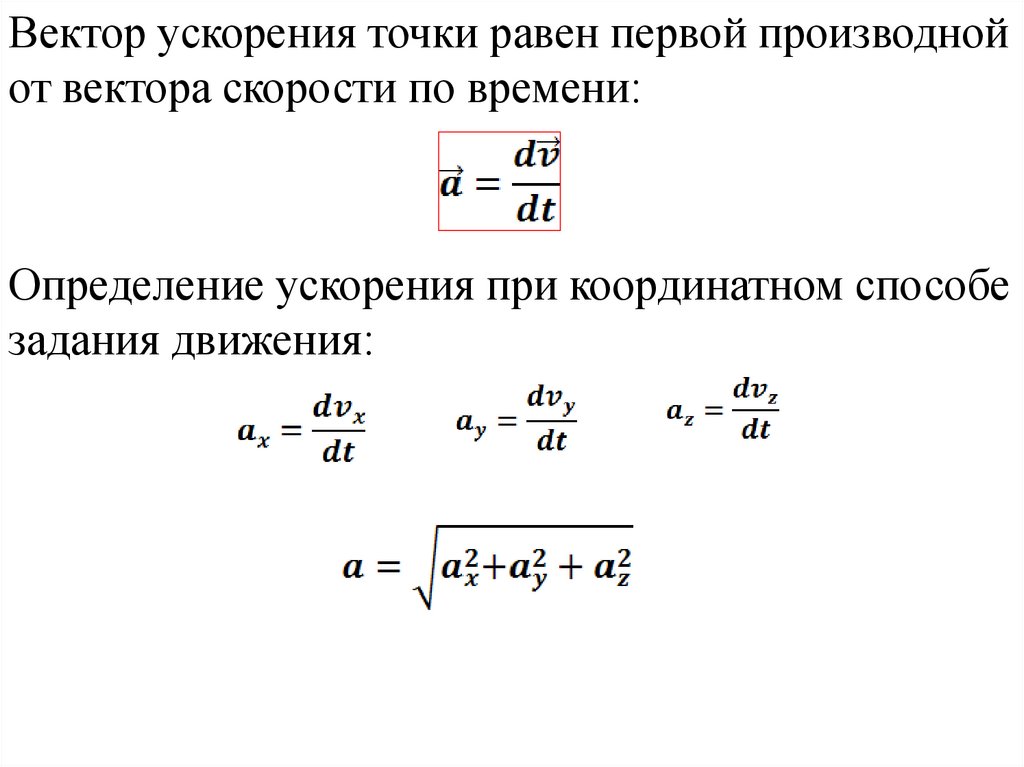
Вектор ускорения точки равен первой производнойот вектора скорости по времени:
Определение ускорения при координатном способе
задания движения:
17.
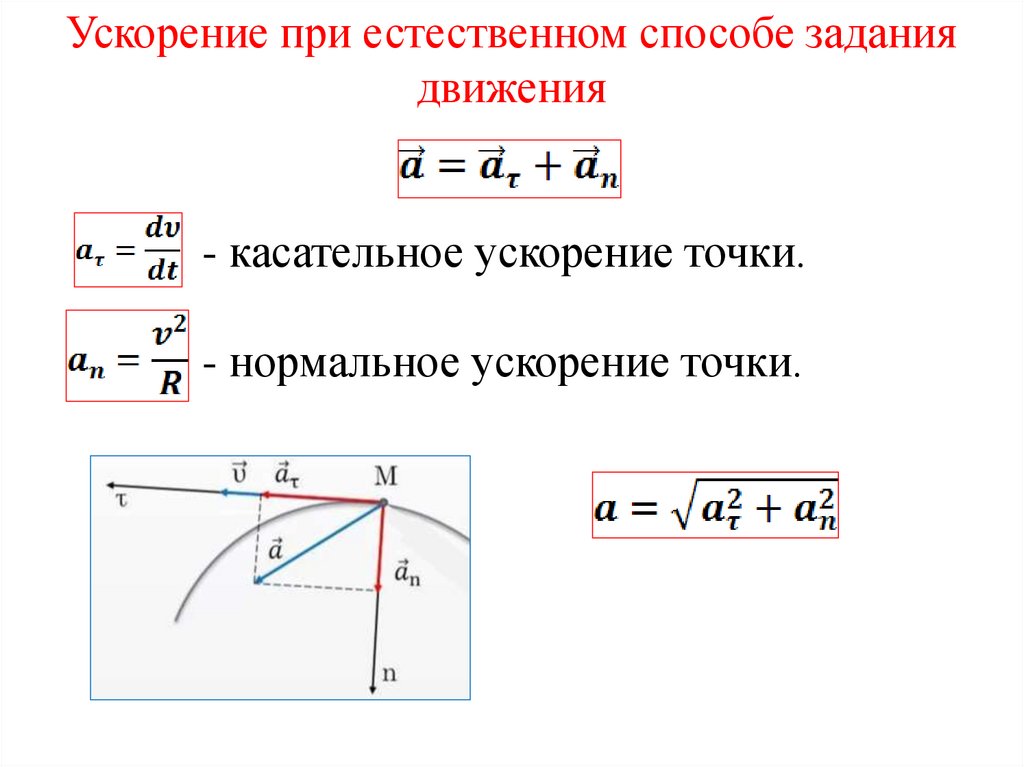
Ускорение при естественном способе заданиядвижения
- касательное ускорение точки.
- нормальное ускорение точки.
18.
4. Виды движений19.
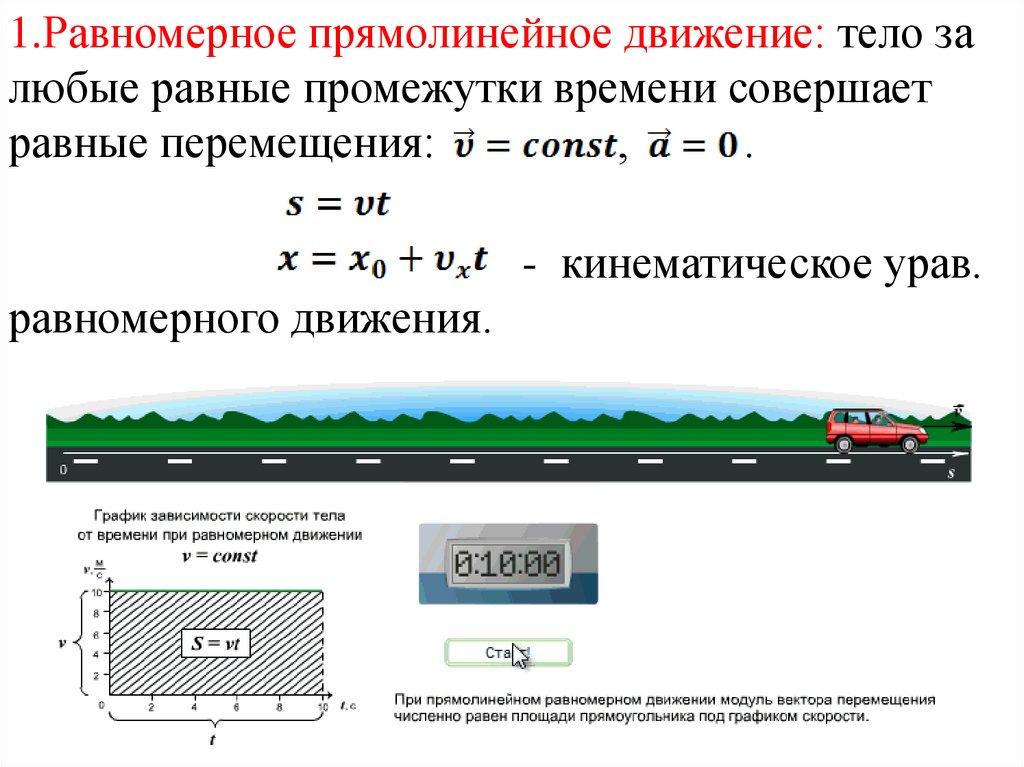
1.Равномерное прямолинейное движение: тело залюбые равные промежутки времени совершает
равные перемещения:
,
.
- кинематическое урав.
равномерного движения.
20.
2. Равнопеременное прямолинейное движение:модуль скорости за равные промежутки времени
изменяется на одинаковую величину:
,
,
.
21.
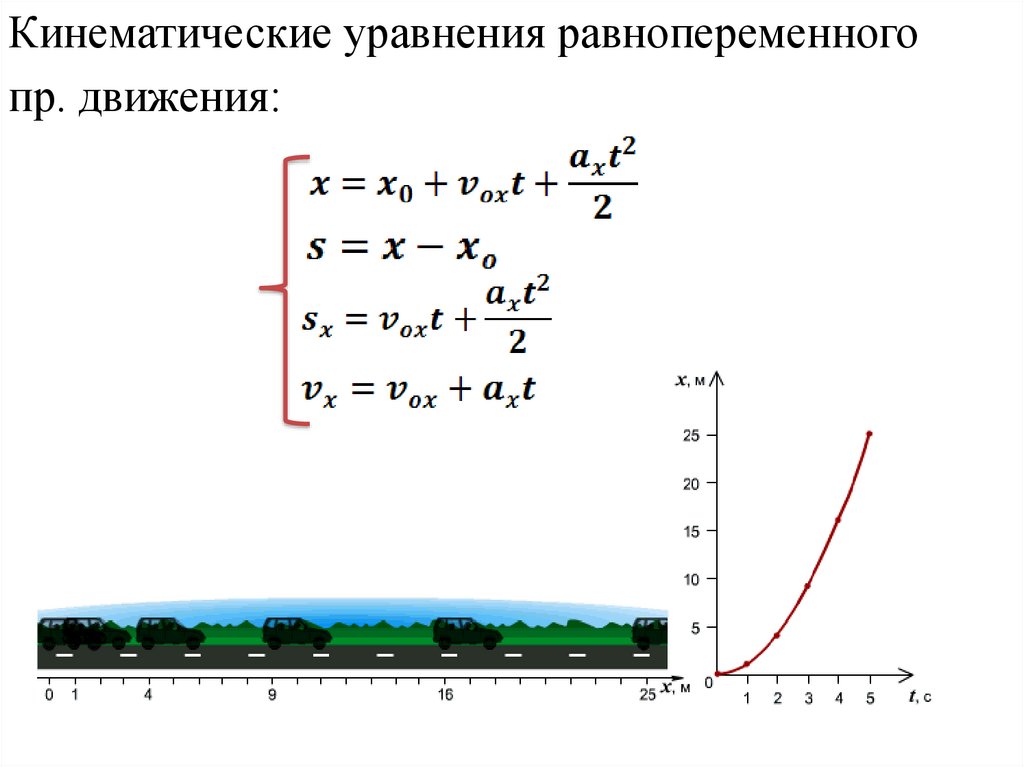
Кинематические уравнения равнопеременногопр. движения:
22.
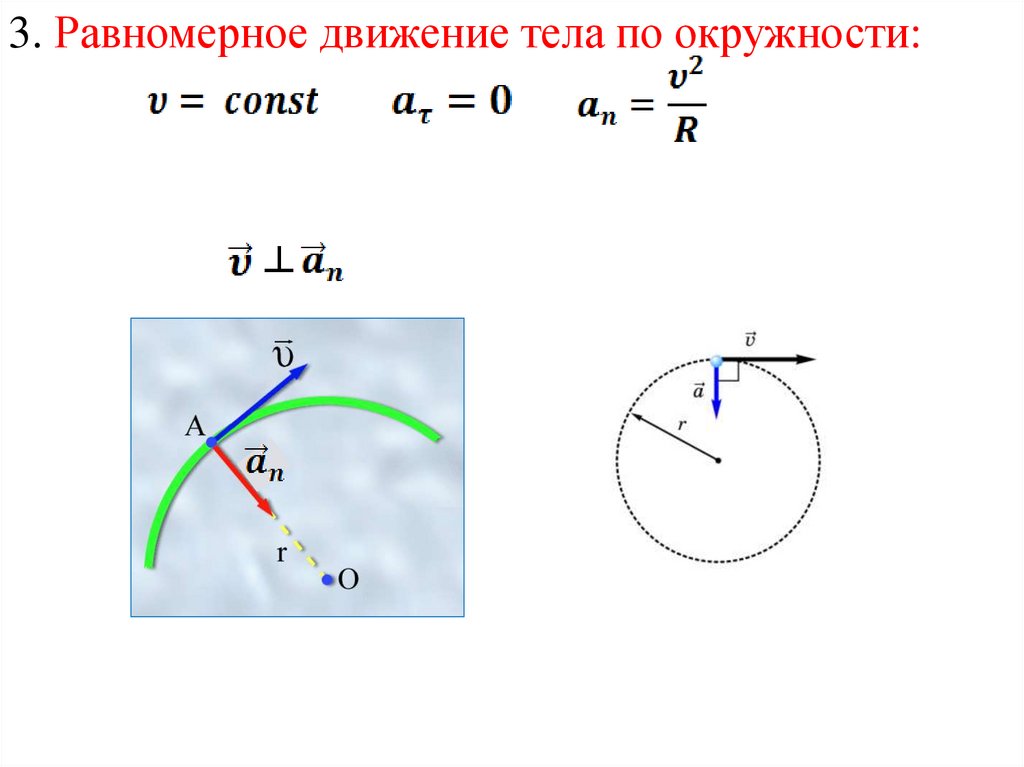
3. Равномерное движение тела по окружности:┴
23.
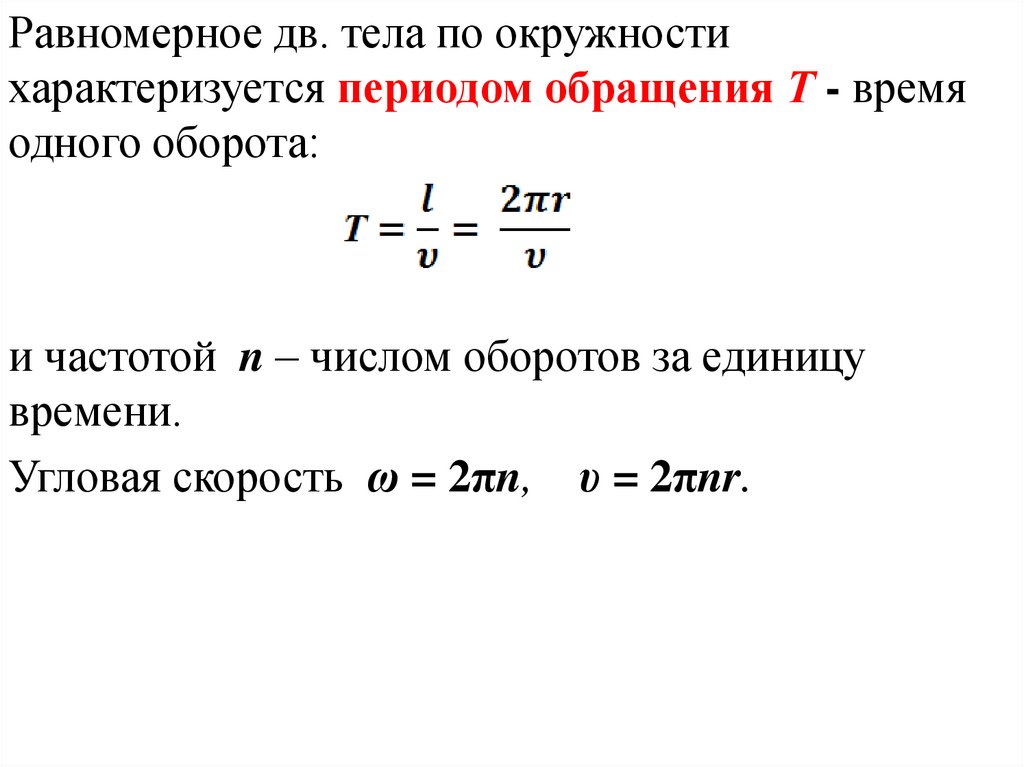
Равномерное дв. тела по окружностихарактеризуется периодом обращения Т - время
одного оборота:
и частотой n – числом оборотов за единицу
времени.
Угловая скорость ω = 2πn, υ = 2πnr.
24.
5. Угловые характеристикидвижения
25.
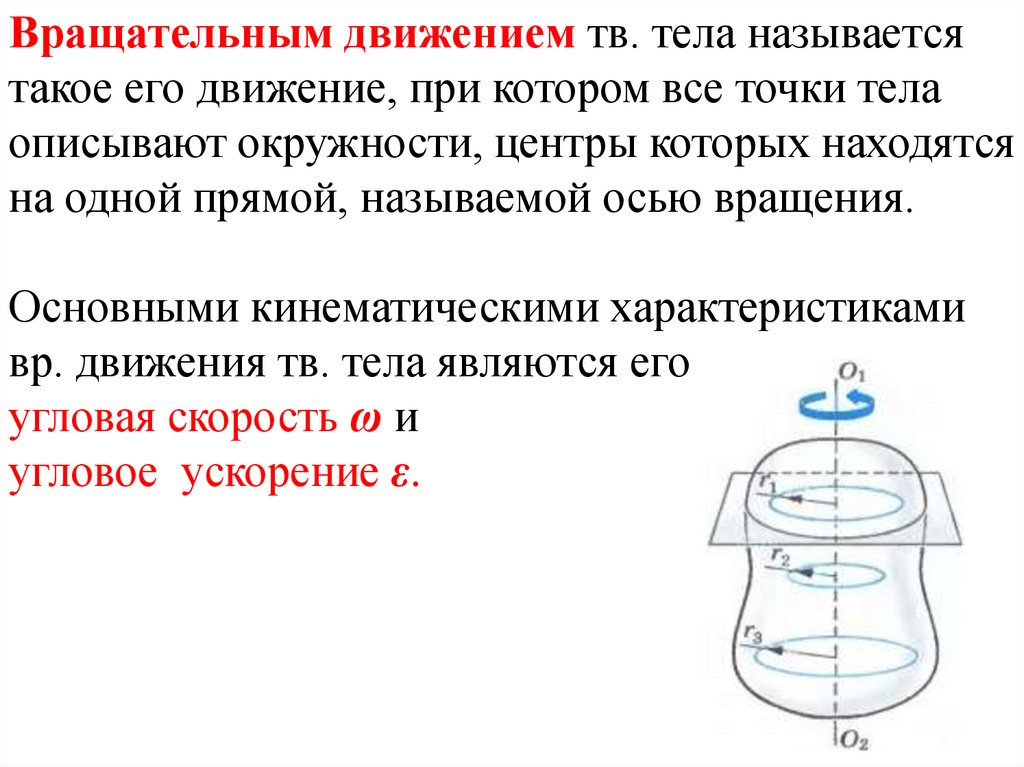
Вращательным движением тв. тела называетсятакое его движение, при котором все точки тела
описывают окружности, центры которых находятся
на одной прямой, называемой осью вращения.
Основными кинематическими характеристиками
вр. движения тв. тела являются его
угловая скорость ω и
угловое ускорение ε.
26.
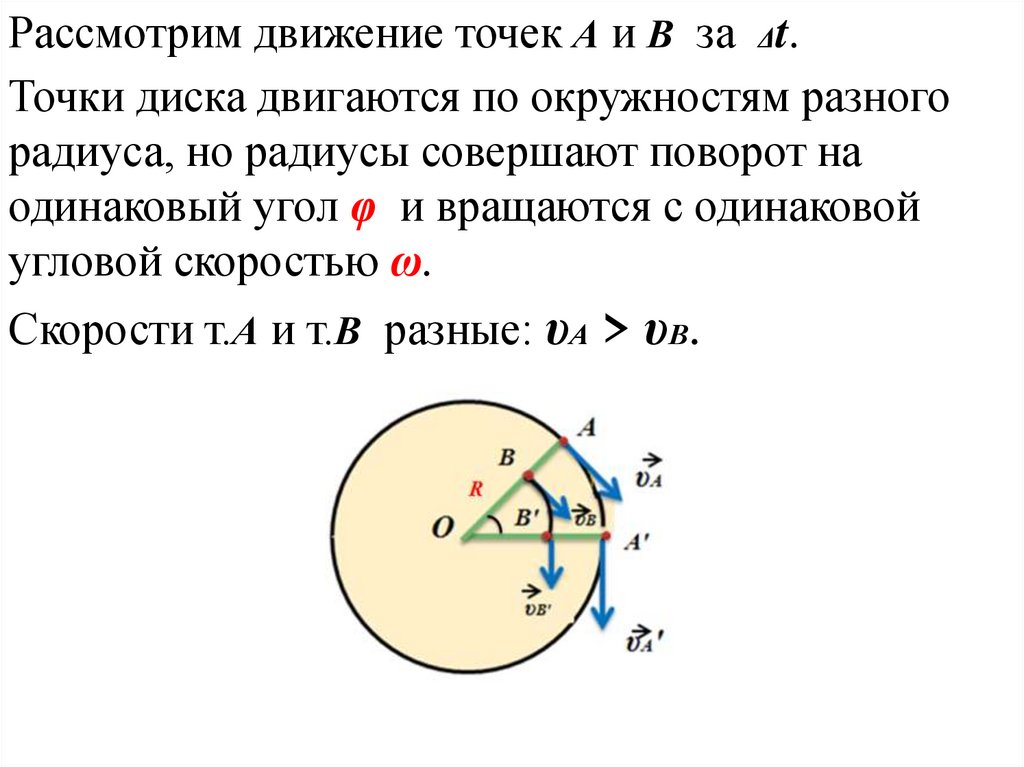
Рассмотрим движение точек А и В за Δt.Точки диска двигаются по окружностям разного
радиуса, но радиусы совершают поворот на
одинаковый угол φ и вращаются с одинаковой
угловой скоростью ω.
Скорости т.А и т.В разные: υА > υВ.
27.
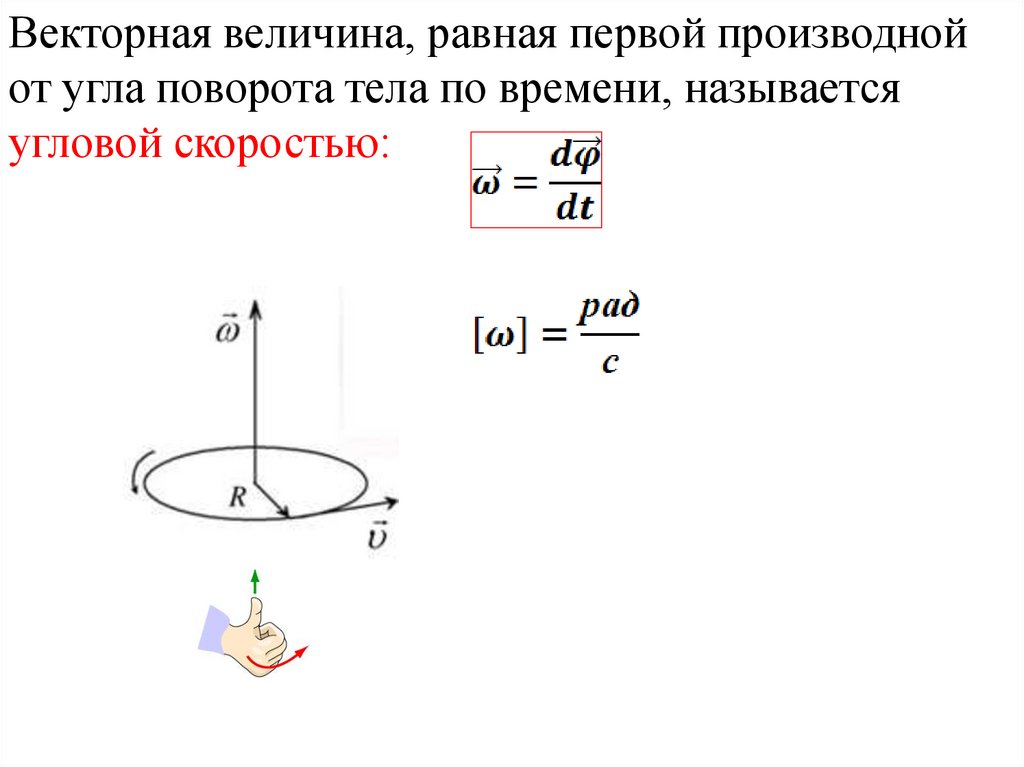
Векторная величина, равная первой производнойот угла поворота тела по времени, называется
угловой скоростью:
28.
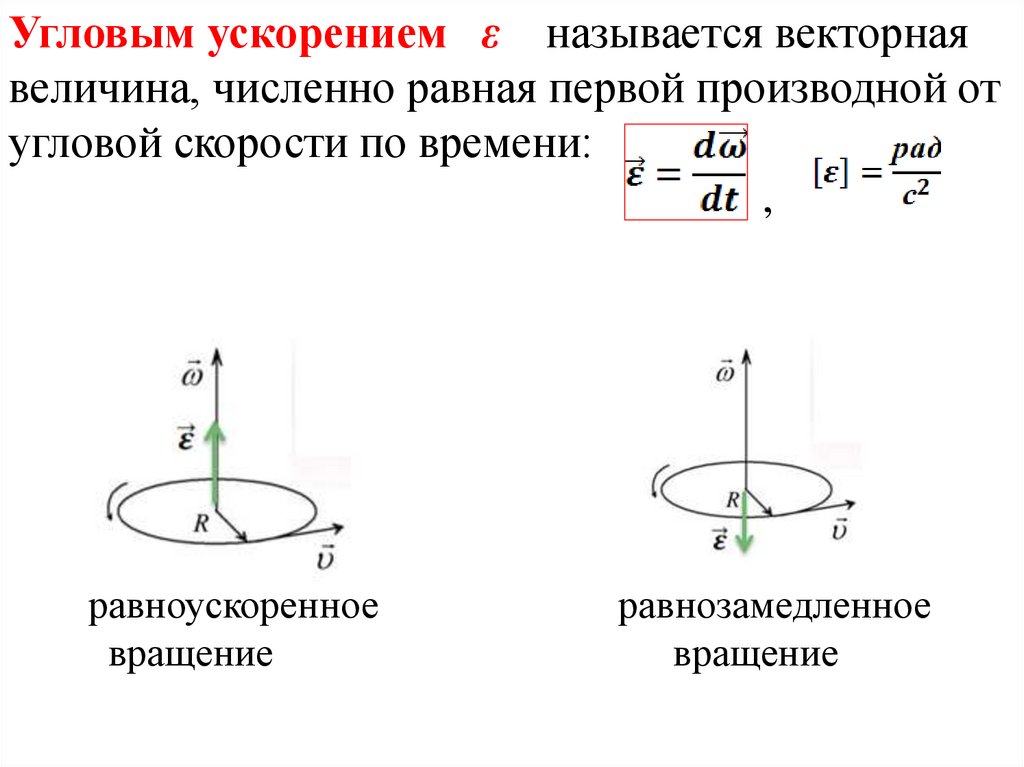
Угловым ускорением ε называется векторнаявеличина, численно равная первой производной от
угловой скорости по времени:
,
равноускоренное
вращение
равнозамедленное
вращение
29.
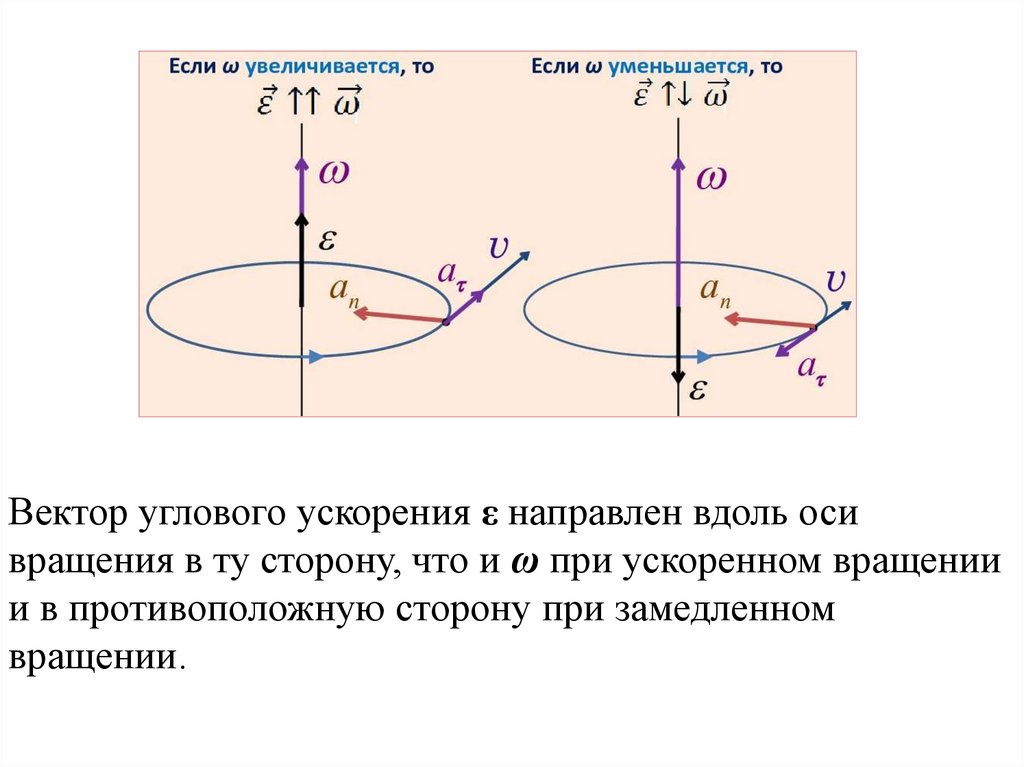
Вектор углового ускорения ε направлен вдоль осивращения в ту сторону, что и ω при ускоренном вращении
и в противоположную сторону при замедленном
вращении.
30.
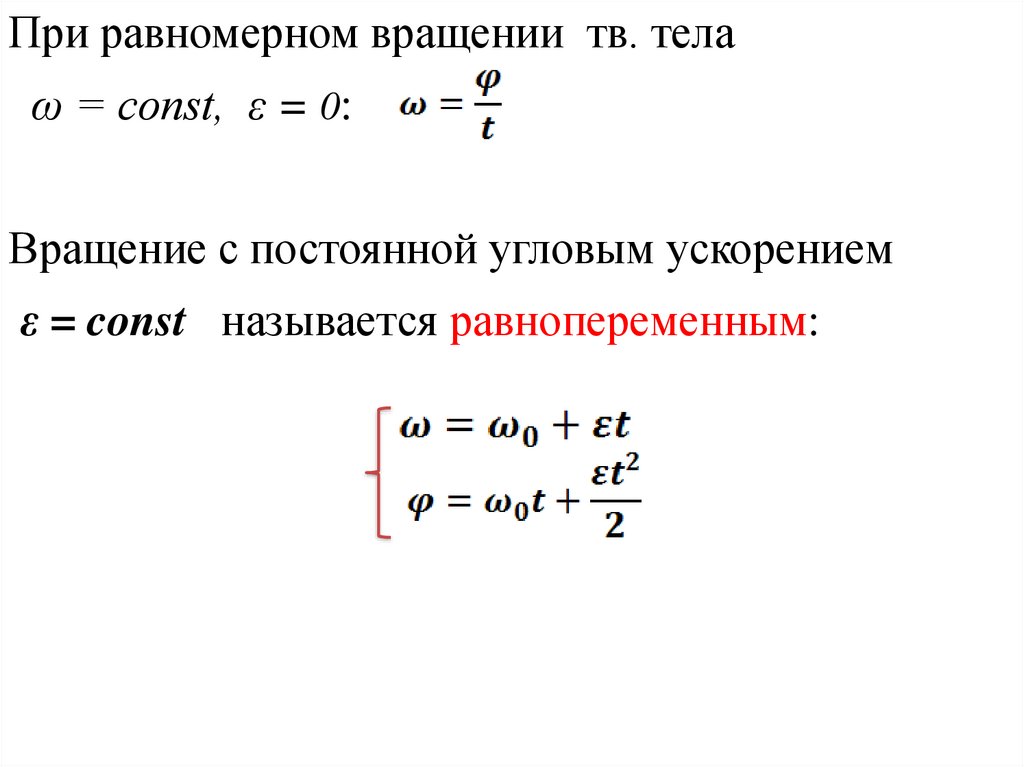
При равномерном вращении тв. телаω = const, ε = 0:
Вращение с постоянной угловым ускорением
ε = const называется равнопеременным:
31.
Связь линейных и угловых величинВывод:
32.
33.
6. Плоское движение34.
Плоским движением твердого тела называютдвижение, при котором каждая его точка движется
в одной и той же плоскости.
Плоскости движения точек параллельны между
собой. Траектории точек при плоском движении
являются плоскими кривыми.
35.
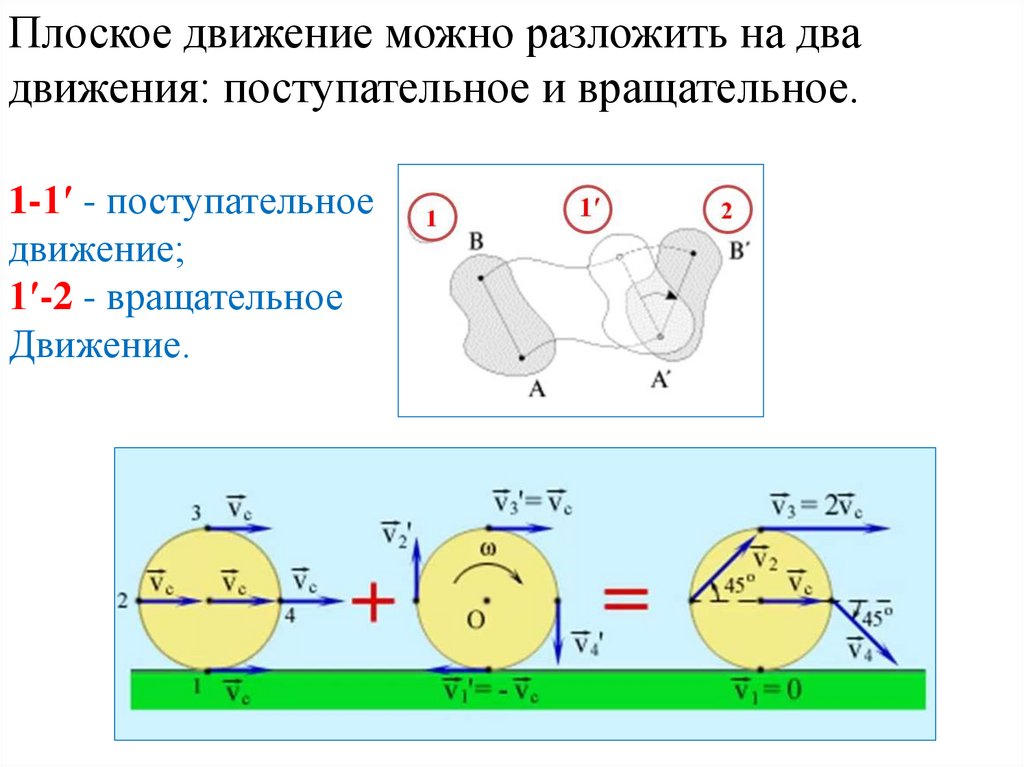
Плоское движение можно разложить на двадвижения: поступательное и вращательное.
1-1′ - поступательное
движение;
1′-2 - вращательное
Движение.
36. Сумма вращательного и поступательного движений определяет плоское движение
37.
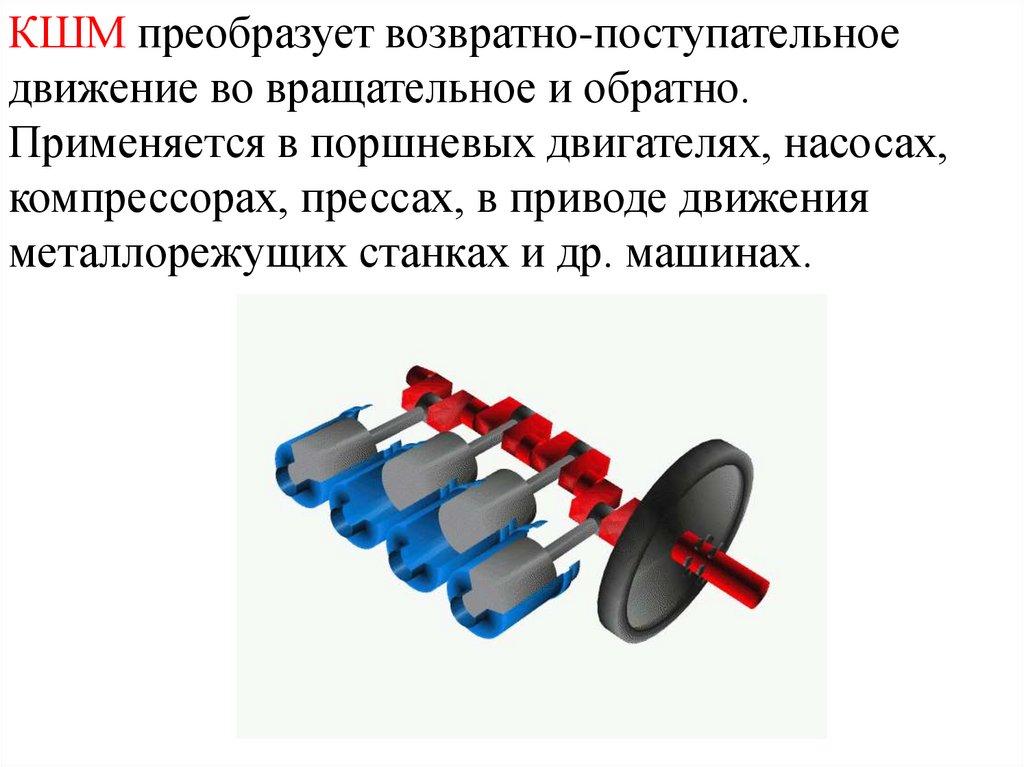
Пример плоского движения: действиекривошипно-шатунного механизма (КШМ).
38.
КШМ преобразует возвратно-поступательноедвижение во вращательное и обратно.
Применяется в поршневых двигателях, насосах,
компрессорах, прессах, в приводе движения
металлорежущих станках и др. машинах.
39.
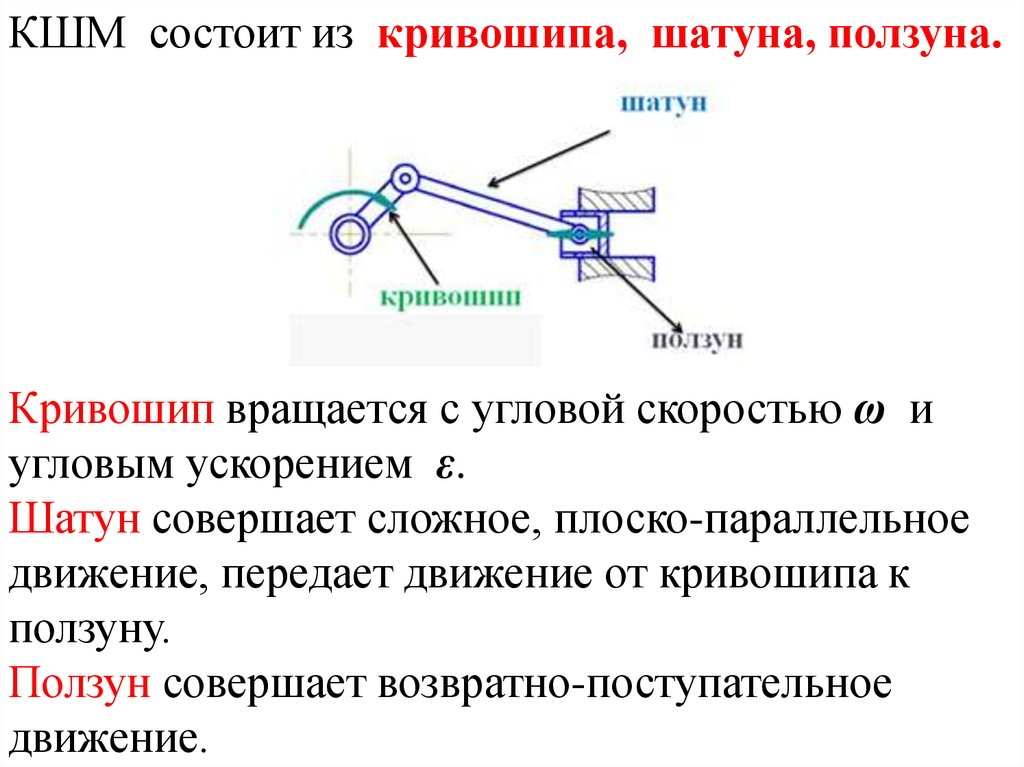
КШМ состоит из кривошипа, шатуна, ползуна.Кривошип вращается с угловой скоростью ω и
угловым ускорением ε.
Шатун совершает сложное, плоско-параллельное
движение, передает движение от кривошипа к
ползуну.
Ползун совершает возвратно-поступательное
движение.
40.
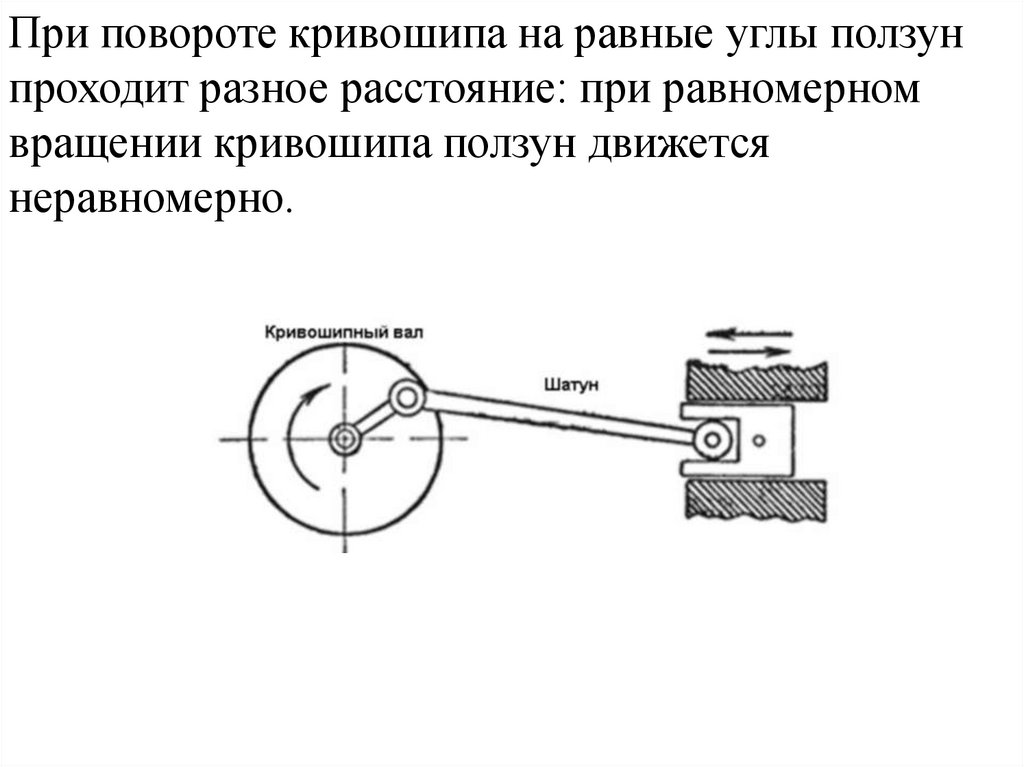
При повороте кривошипа на равные углы ползунпроходит разное расстояние: при равномерном
вращении кривошипа ползун движется
неравномерно.