




 Менеджмент
Менеджмент Промышленность
ПромышленностьПохожие презентации:






")



Разработка учебно-лабораторного комплекса для подготовки персонала в области внедрения и эксплуатации АСУТП
1.
Разработка учебно-лабораторногокомплекса для подготовки персонала в
области внедрения и эксплуатации АСУТП
Авторы (гр. АТП-19-1б):
Федотов С.С.
Столбов Н.И.
Пятковский Я.Д.
Научный руководитель:
Сокольчик П.Ю.
2.
ВведениеМетоды формирования навыков при подготовке специалистов:
• применение лабораторных установок, представляющих собой
объект управления в миниатюре (физическая модель);
• применение программно-реализуемых математических
моделей, описывающих производство в целом или его части
(программная модель);
• комбинированная модель, совмещающая достоинства
физической и программной модели.
3.
Цель и задачиЦель: разработка учебно-лабораторного комплекса для подготовки
персонала занятого в области внедрения и эксплуатации АСУТП
Задачи:
разработка, монтаж и наладка системы управления исполнительными
устройствами с мембранным и электродвигательным ИМ;
разработка системы имитации технологического объекта с
применением микропроцессорного комплекса;
интеграция симулятора технологического объекта и физических
приборов и средств автоматизации.
4.
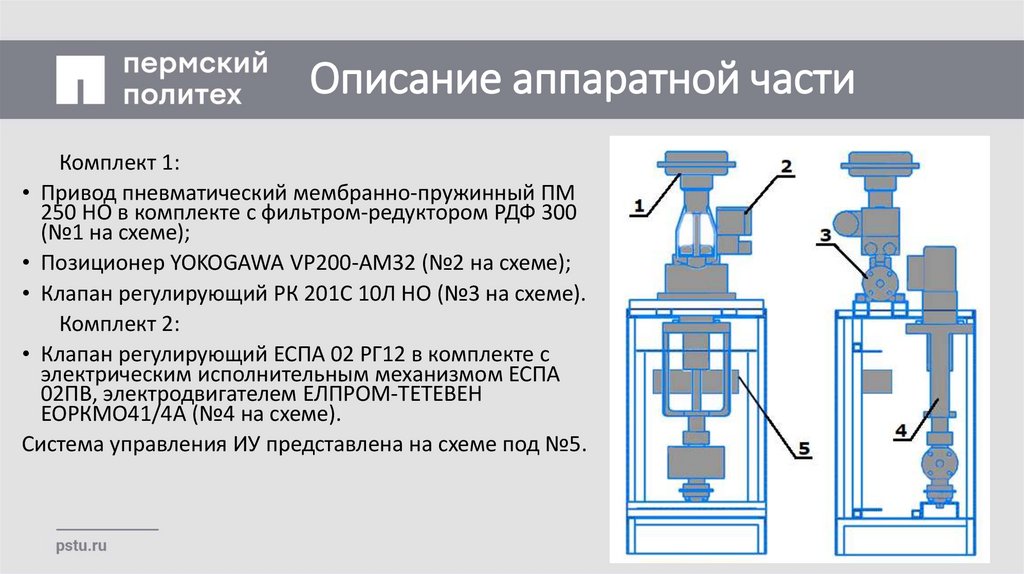
Описание аппаратной частиКомплект 1:
• Привод пневматический мембранно-пружинный ПМ
250 НО в комплекте с фильтром-редуктором РДФ 300
(№1 на схеме);
• Позиционер YOKOGAWA VP200-AM32 (№2 на схеме);
• Клапан регулирующий РК 201С 10Л НО (№3 на схеме).
Комплект 2:
• Клапан регулирующий ЕСПА 02 РГ12 в комплекте с
электрическим исполнительным механизмом ЕСПА
02ПВ, электродвигателем ЕЛПРОМ-ТЕТЕВЕН
ЕОРКМО41/4А (№4 на схеме).
Система управления ИУ представлена на схеме под №5.
5.
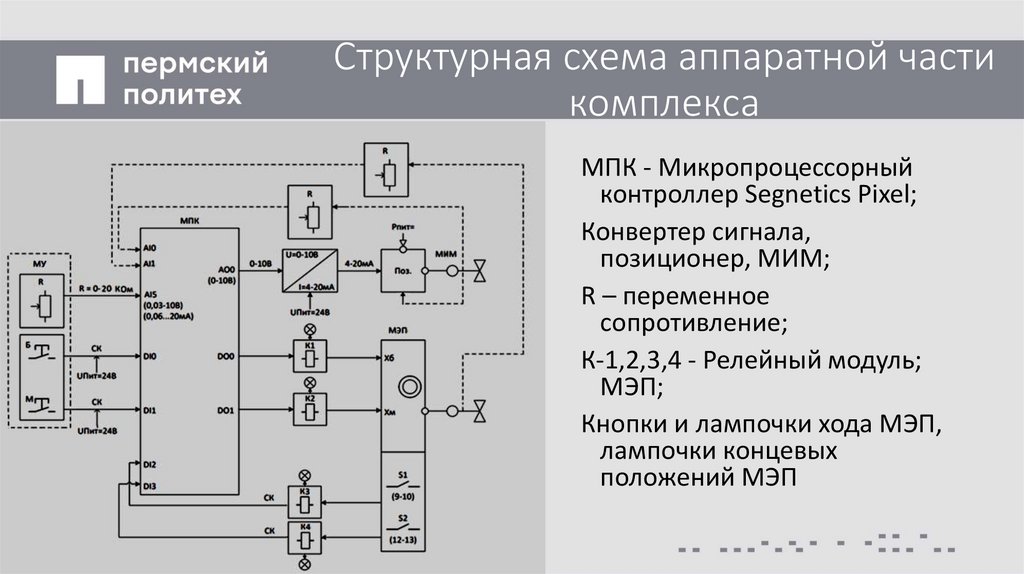
Структурная схема аппаратной частикомплекса
МПК - Микропроцессорный
контроллер Segnetics Pixel;
Конвертер сигнала,
позиционер, МИМ;
R – переменное
сопротивление;
К-1,2,3,4 - Релейный модуль;
МЭП;
Кнопки и лампочки хода МЭП,
лампочки концевых
положений МЭП
6.
Программа МПК по реализации управления ииспытания ИУ
Управление,
отображение
положения
электродвигательного
исполнительного
устройства
7.
Программа МПК по реализации управления ииспытания ИУ
Управление,
испытание и
отображение
положения
мембранного
исполнительного
устройства
8.
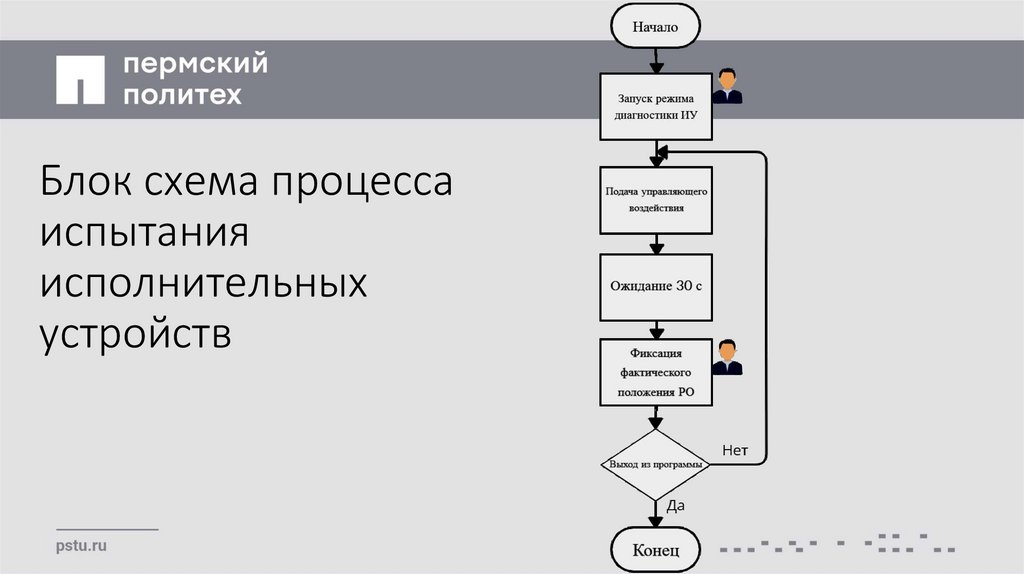
Блок схема процессаиспытания
исполнительных
устройств
9.
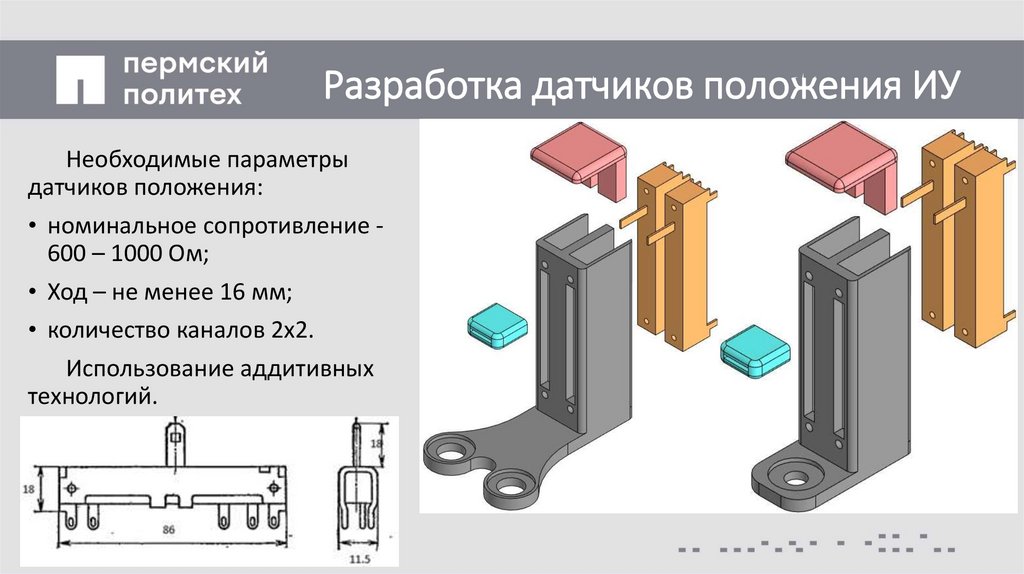
Разработка датчиков положения ИУНеобходимые параметры
датчиков положения:
• номинальное сопротивление 600 – 1000 Ом;
• Ход – не менее 16 мм;
• количество каналов 2х2.
Использование аддитивных
технологий.
10.
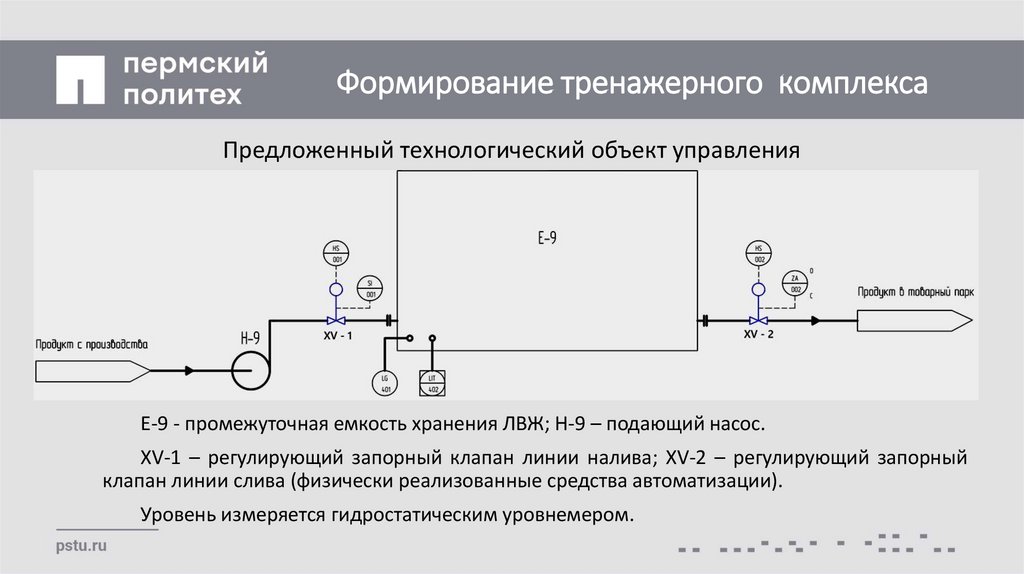
Формирование тренажерного комплексаПредложенный технологический объект управления
Е-9 - промежуточная емкость хранения ЛВЖ; Н-9 – подающий насос.
XV-1 – регулирующий запорный клапан линии налива; XV-2 – регулирующий запорный
клапан линии слива (физически реализованные средства автоматизации).
Уровень измеряется гидростатическим уровнемером.
11.
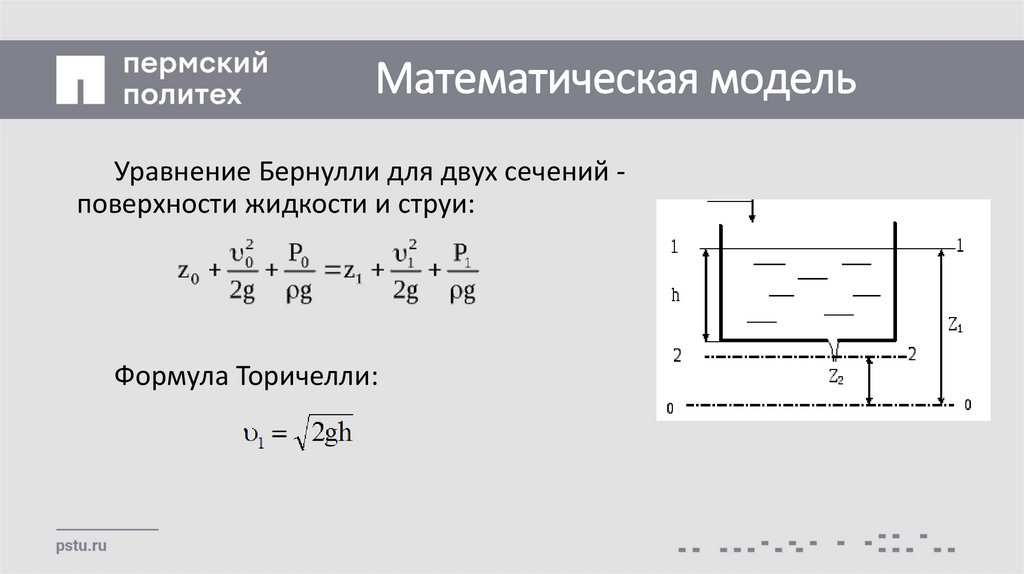
Математическая модельУравнение Бернулли для двух сечений поверхности жидкости и струи:
Формула Торичелли:
12.
Структурная схема имитатора ОУТехнические средства:
Расчет
математической модели
- микропроцессорный
контроллер Arduino
Nano;
«Измерение» уровня:
местный показывающий
манометр,
гидростатический датчик
уровня с дистанционной
передачей на базе
датчика давления.
13.
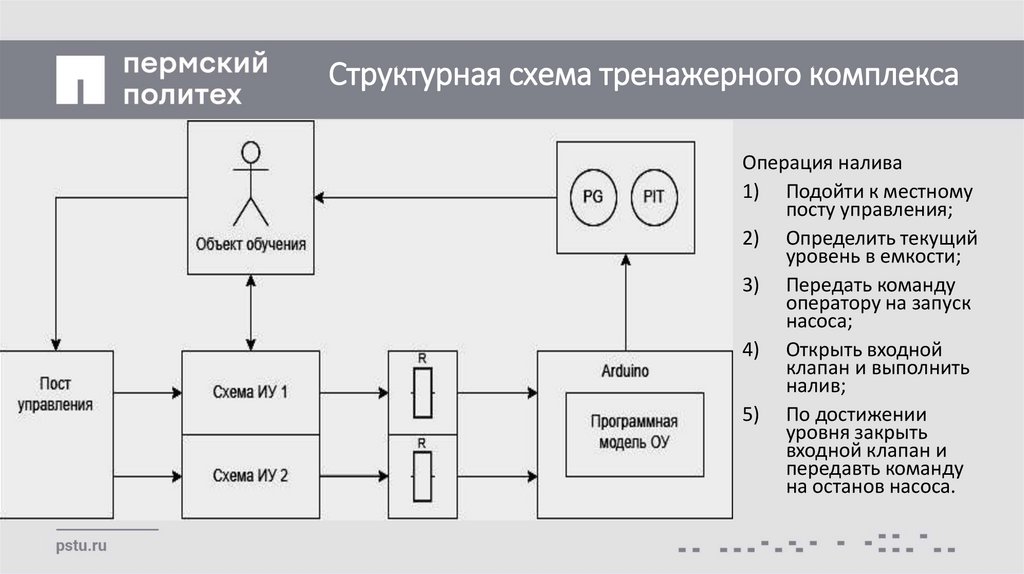
Структурная схема тренажерного комплексаОперация налива
1) Подойти к местному
посту управления;
2) Определить текущий
уровень в емкости;
3) Передать команду
оператору на запуск
насоса;
4) Открыть входной
клапан и выполнить
налив;
5) По достижении
уровня закрыть
входной клапан и
передавть команду
на останов насоса.