














 Астрономия
АстрономияПохожие презентации:










Разработка математической модели виртуальной камеры для формирования и исследования зон обзора в плоскости Земли
1. Разработка математической модели виртуальной камеры для формирования и исследования зон обзора в плоскости Земли
РАЗРАБОТКА МАТЕМАТИЧЕСКОЙМОДЕЛИ ВИРТУАЛЬНОЙ КАМЕРЫ ДЛЯ
ФОРМИРОВАНИЯ И ИССЛЕДОВАНИЯ
ЗОН ОБЗОРА В ПЛОСКОСТИ ЗЕМЛИ
Выполнил: студент гр. 940 Большаков И. А.
Руководитель работы: проф. Кафедры ЭВМ Новиков А.И.
2. Системы технического зрения в авиационных системах
СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ В АВИАЦИОННЫХСИСТЕМАХ
Основные задачи авиационных систем технического зрения:
• обнаружение объектов и идентификация целей;
• навигация;
• анализ изображений земной поверхности на этапе
планирования авиационных операций;
• получение, обработка и комплексирование
многоспектральных видеоданных;
• совмещение разнородных изображений.
Рисунок 1 - система
«синтезированного зрения»
SVS
2
3.
СОВМЕЩЕНИЕ ИЗОБРАЖЕНИЙОбъединение информации, содержащейся в РИ и ВИ, позволяет формировать
комбинированное изображение. При помощи комбинированных изображений возможно
«восстановить» те части реального изображения, которые были потеряны из–за внешних
факторов.
a
б
Рисунок 2 – Видеоизображение взлетно-посадочной полосы в условиях
тумана (а), комбинированное изображение (б)
3
4.
ПОСТАНОВКА ЗАДАЧИЦелью данной работы является разработка математической модели виртуальной камеры,
формирование и исследование с ее помощью зон изображения в плоскости Земли.
Задачи работы:
Разработка математической модели виртуальной камеры;
Разработка программной реализации математической модели виртуальной камеры;
Проведение экспериментальных исследований для исследования влияния ошибок
навигационных параметров на смещение границ в плоскости Земли.
4
5.
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ВИРТУАЛЬНОЙ КАМЕРЫРазделим процесс разработки математической модели на три этапа:
1) найдем координаты точек основания пирамиды;
2) повернем пирамиду в плоскости тангажа в рабочее положение;
3) найдем координаты точек в плоскости Земли, являющихся результатом
пересечения лучей, выходящих из основания пирамиды, с плоскостью Земли.
Рисунок 3 – Зона обзора видеокамеры
Рисунок 4 – Обзор камеры в рабочем положении
5
6.
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ВИРТУАЛЬНОЙ КАМЕРЫДля получения точек основания пирамиды применим
формулы (1)
Новые координаты точек после поворота пирамиды в
рабочее положение найдем по формулам (2)
Проекции точек A , A , B , B на плоскость Земли
1
2
1
найдем из системы (3)
2
A1 tg 0 ; tg 0 ; 1 ; A2 tg 0 ; tg 0 ; 1
2
2
2
2
0
0
0 0
(1)
B1 tg ; tg ; 1 ; B2 tg ; tg ; 1 .
2
2
2
2
xM 1 x M cos 1 z M sin 1 ,
(2)
1
z M x M sin 1 z M cos 1 .
y
z
x
1 1 1 ,
xM y M z M
z h ,
(3)
6
7.
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ВИРТУАЛЬНОЙ КАМЕРЫС УЧЕТОМ ОШИБОК
Для учета угловых ошибок навигационных параметров
применим формулу (4)
4
1
X M T T T X M
г
cos sin 0
T sin cos 0
0
0
1
cos
T
0
sin
0 sin
1
0
0 cos
(4),
0
1
T 0 cos
0 sin
0
sin
cos
Для учета ошибок положения ЛА применим формулы (5), (6)
(5)
h h 1
xM ,
1
x
zM
h h 1
y
yM .
1
zM
x x x ,
y y x .
(6)
7
8.
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ВИРТУАЛЬНОЙ КАМЕРЫРисунок 6 – Зона изображения (обзора)
в плоскости земли при отсутствии
ошибок
Рисунок 5 – Блок схема
алгоритма формирования зоны
обзора
8
9.
СТРУКТУРА ПРОГРАММНОГО СТЕНДА9
10.
ИНТЕРФЕЙС ПОЛЬЗОВАТЕЛЯРисунок 7 – Главное окно
программы
Рисунок 8 – Окно с выводом
результатов
10
11.
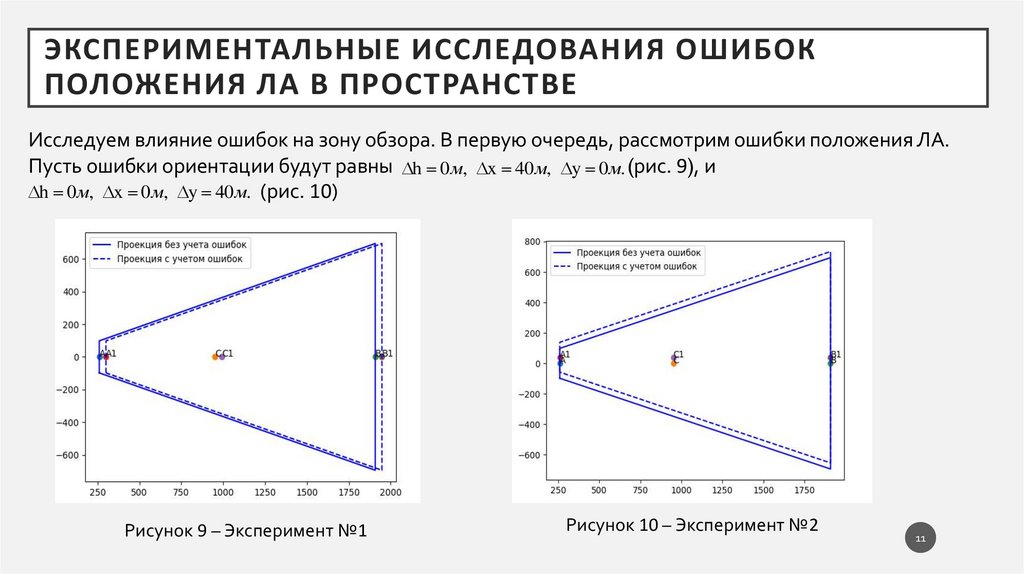
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ОШИБОКПОЛОЖЕНИЯ ЛА В ПРОСТРАНСТВЕ
Исследуем влияние ошибок на зону обзора. В первую очередь, рассмотрим ошибки положения ЛА.
Пусть ошибки ориентации будут равны h 0 м, x 40 м, y 0 м. (рис. 9), и
h 0 м, x 0 м, y 40 м. (рис. 10)
Рисунок 9 – Эксперимент №1
Рисунок 10 – Эксперимент №2
11
12.
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ПРЕДЕЛЬНЫХОШИБОК НАВИГАЦИИ
Пусть заявленные предельные ошибки будут 0.1 , 0.1, 0.1 (рис. 11)
Числовые характеристики зоны обзора без учета ошибок
Площадь: 1305889.37 м2
Числовые характеристики зоны обзора с учетом ошибок
Площадь: 1222169.96 м2
Площадь зоны обзора без ошибок больше площади
смешенной зоны в 1.06 раз
Расстояние между A0 и A0 равно 1.48 м.
Расстояние между B0 и B0 равно 61.65 м.
Расстояние между C 0 и C равно 15.79 м.
0
Вывод: предельные (максимальные) значения ошибок по
углам Эйлера приводят к смещению произвольной точки в
зоне обзора меньше, чем на 5 мрад
Рисунок 11 – Эксперимент №5
12
13.
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ОШИБКИ ВЫСОТЫИсследуем теперь влияние ошибки в оценивании высоты ЛА на смещение зоны обзора.
Пусть h 40 м (рис. 12)
Площадь смещенной зоны обзора при таких параметрах
равняется 2559544.73 м2., что в 1.96 раз больше зоны
обзора без ошибок.
Расстояния между точками
A0, B0, C0 и A0 , B0 , C0 соответственно равны 104.2 м.,
380.57м. и 763.25м.
Вывод: предельная ошибка по высоте приводит к
максимальному изменению зоны обзора вдоль оси
OX
Рисунок 12 – Эксперимент №6
13
14.
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ПРЕДЕЛЬНОЙЗОНЫ ОБЗОРА
Будем формировать предельную зону при параметрах h 40 м, x 40 м, y 40 м
0 40 , 0 30 , h 100 м, 0.1 , 0.1 , 0.1 (рис. 13)
.
Числовые характеристики зоны обзора без учета ошибок
Длина меньшего основания: 196.2 м.
Длина большего основания: 1389 м.
Длина боковых сторон трапеции: 1755 м.
Площадь: 1305889.37 м2
Числовые характеристики зоны обзора с учетом ошибок
Длина меньшего основания: 276.2 м., что на 40% больше
Длина большего основания: 2024.6 м., что на 45% больше
Длина боковых сторон трапеции: 2639.8 м., что на 50%
больше
Площадь предельной зоны обзора: 2865467.42 м2, что
больше площади зоны без учета ошибок в 2.19 раза.
Рисунок 13 – Эксперимент №7
14
15.
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ВЛИЯНИЕОШИБОК НА КОНТУРЫ ОБЪЕКТОВ
h 0 м, x 40 м, y 40 м
Рисунок 14 – Эксперимент №8
h 40 м, x 0 м, y 0 м
Рисунок 15 – Эксперимент №9
0.1 , 0 , 0 ,
Рисунок 16 – Эксперимент №10
15
16.
ЗАКЛЮЧЕНИЕВ данной работе получены следующие результаты:
• разработана математическая модель виртуальной камеры;
• разработан программный комплекс, реализующий функционал математической модели;
• при помощи реализованного программного обеспечения проведена серия экспериментальных
исследований для изучения влияния ошибок навигационных параметров на формируемую зону
обзора;
• сделаны выводы о об ошибках навигационных параметров, наиболее сильно влияющих на
деформацию контуров зоны обзора и объектов в зоне обзора.
По выпускной квалификационной работе были написаны две статьи и опубликованы в межвузовском
сборнике «Методы и средства обработки и хранения информации», а результаты докладывались на
студенческой научно-технической конференции «СНТК - 70».
16