
 Электроника
ЭлектроникаПохожие презентации:
")

Autopilot. Podstawy teoretyczne
1.
AUTOPILOT2.
Podstawy teoretyczne – budowa, obsługa izasady regulacji autopilotów morskich.
Autopiloty automatyczne, to urządzenia współpracujące z maszyną
sterową, które pozwalają na samoczynne utrzymanie statku na
określonym kursie, zastępując w tej czynności sternika.
czyli jest to urządzenie służące do wykonywania określonego zestawu zadań
umożliwiając automatyczne sterowanie statkiem.
Samoster elektroniczny zwany jest autopilotem.
3.
Korzyści płynące z użycia autopilotów◦ wzrost średniej prędkości statku,
◦ oszczędności w eksploatacji statku,
◦ skrócenie czasu rejsu,
◦ zmniejszenie zużycia paliwa.
4.
Zasada działaniaW celu uzyskania dobrej regulacji kursu statku konieczne jest dopasowanie
nastaw regulatora kursu do własności dynamicznych statku.
Z teoretycznego punktu widzenia najlepiej wszystkie stawiane autopilotom
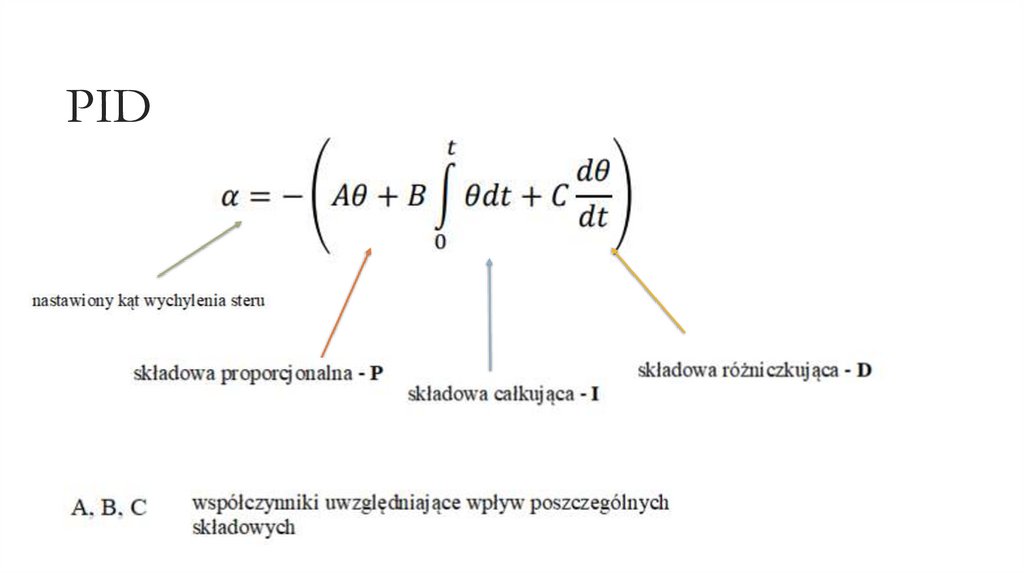
wymagania spełnia regulator typu PID.
P-składowa proporcjonalna
I- składowa całkująca
D-składowa różniczkująca
5.
PID6.
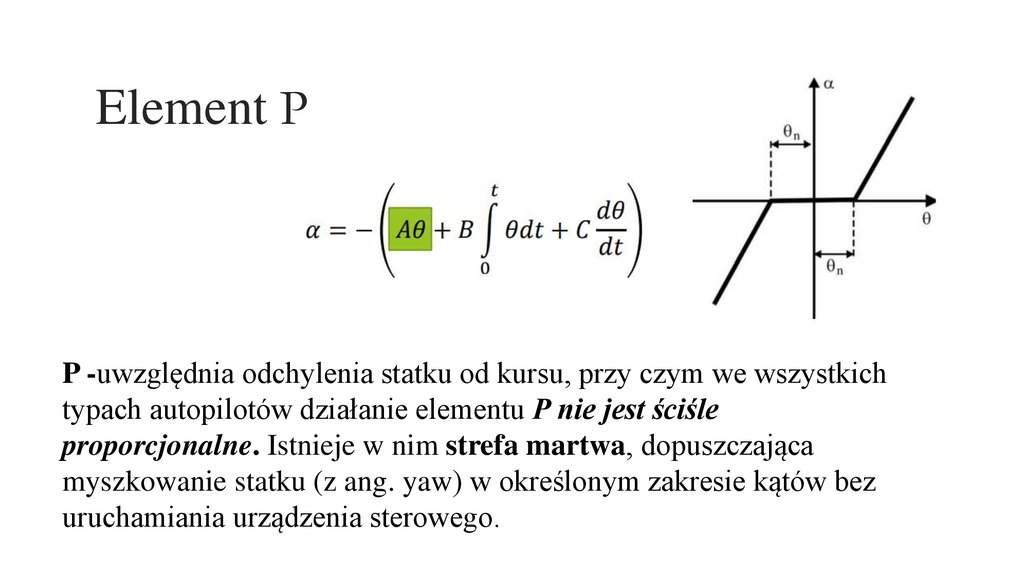
Element PP -uwzględnia odchylenia statku od kursu, przy czym we wszystkich
typach autopilotów działanie elementu P nie jest ściśle
proporcjonalne. Istnieje w nim strefa martwa, dopuszczająca
myszkowanie statku (z ang. yaw) w określonym zakresie kątów bez
uruchamiania urządzenia sterowego.
7.
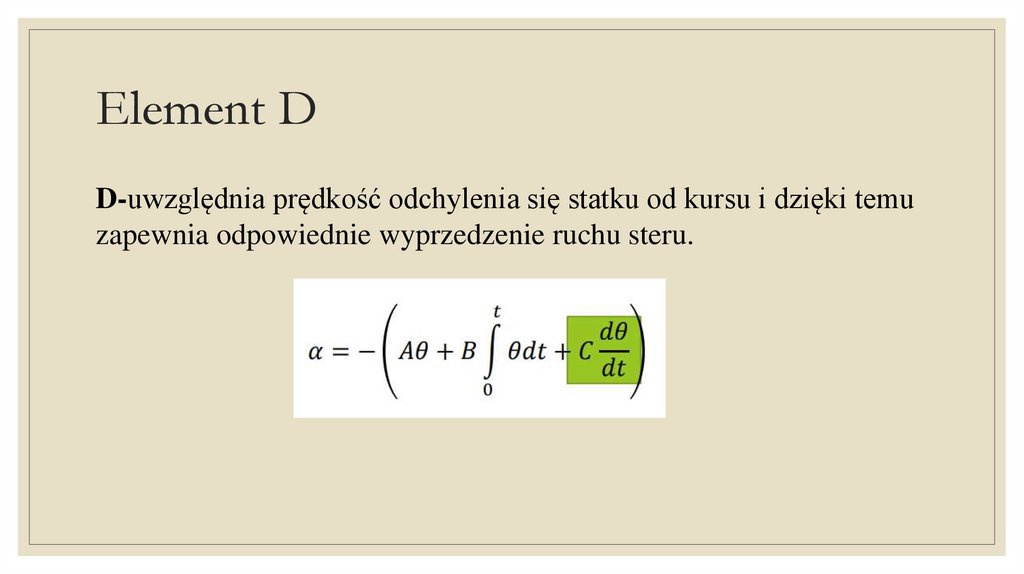
Element DD-uwzględnia prędkość odchylenia się statku od kursu i dzięki temu
zapewnia odpowiednie wyprzedzenie ruchu steru.
8.
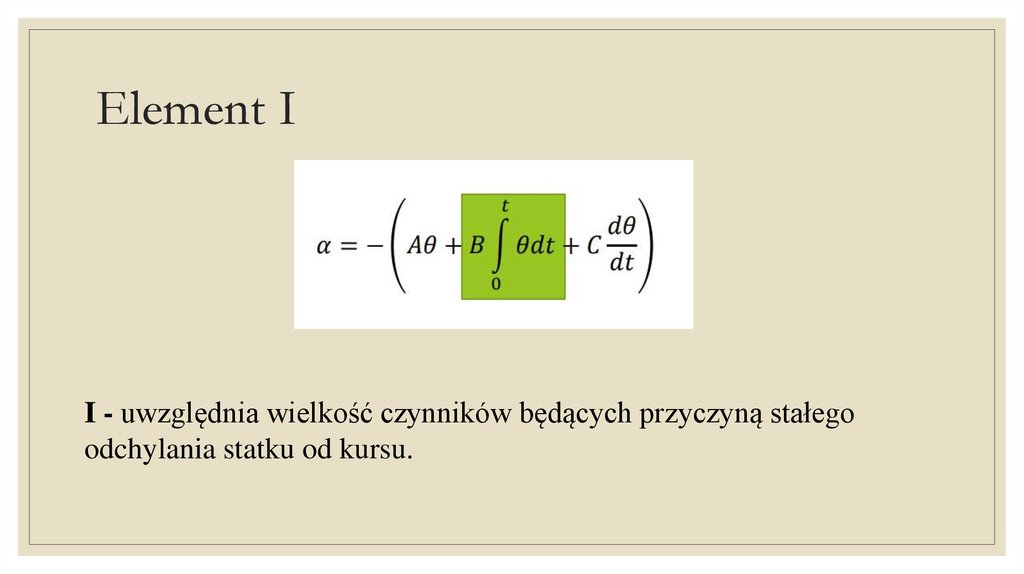
Element II - uwzględnia wielkość czynników będących przyczyną stałego
odchylania statku od kursu.
9.
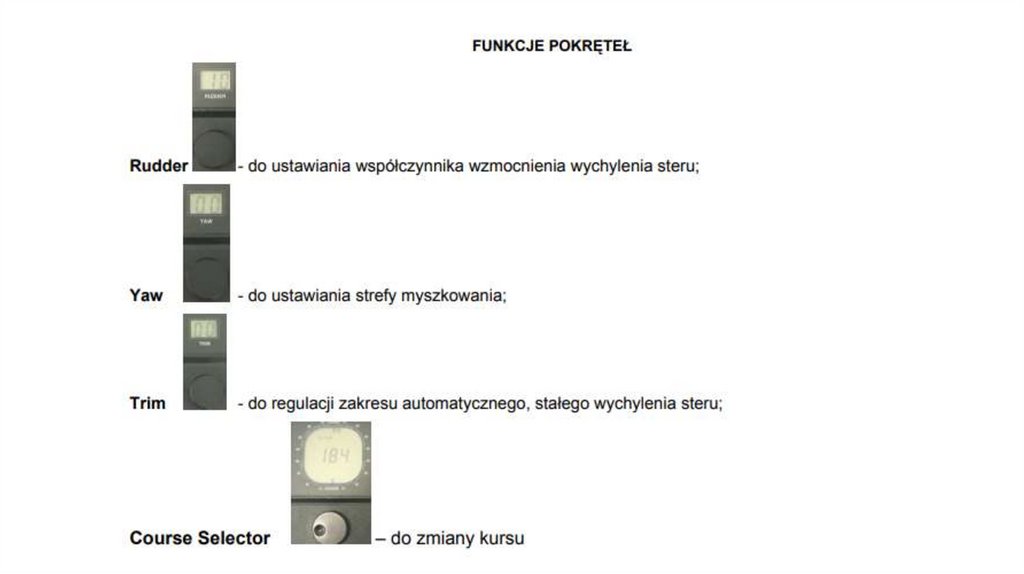
Parametry nastawcze regulatorówWychylenie Rudder – powoduje zmianę wartości kąta wychylenia
steru oraz czas pozostawiania płetwy sterowej w wychyleniu
skrajnym, czyli zmianę współczynnika wzmocnienia –element P.
Czułość Yaw-powoduje zmianę zakresu strefy martwej regulatora,
związanej z myszkowaniem statku.
Współczynnik całkowania (Trim) – wpływa na zakres stałego,
automatycznego wychylenia steru.
10.
Część praktycznaCzęść praktyczna ćwiczenia wykonywana jest przy wykorzystaniu
symulatora komputerowego pozwalającego na analizę wpływu
zmian nastaw podstawowych parametrów regulacyjnych
na proces sterowania automatycznego.
11.
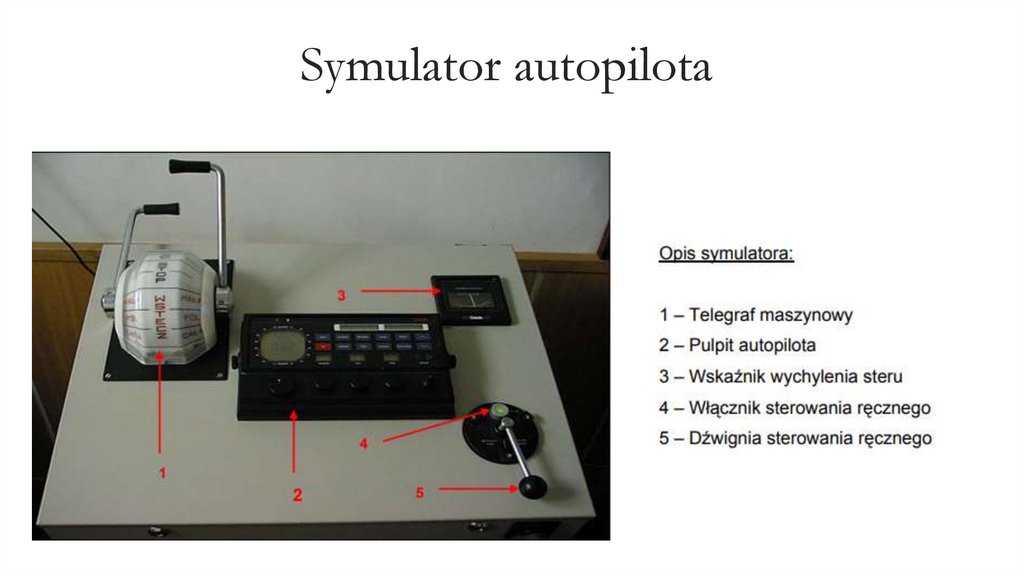
Symulator autopilota12.
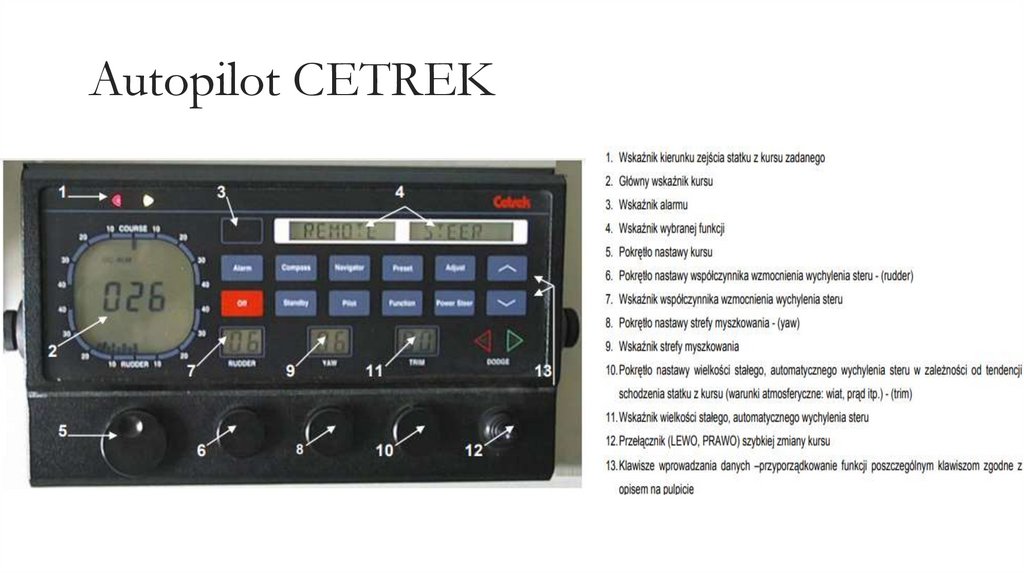
Autopilot CETREK13.
14.
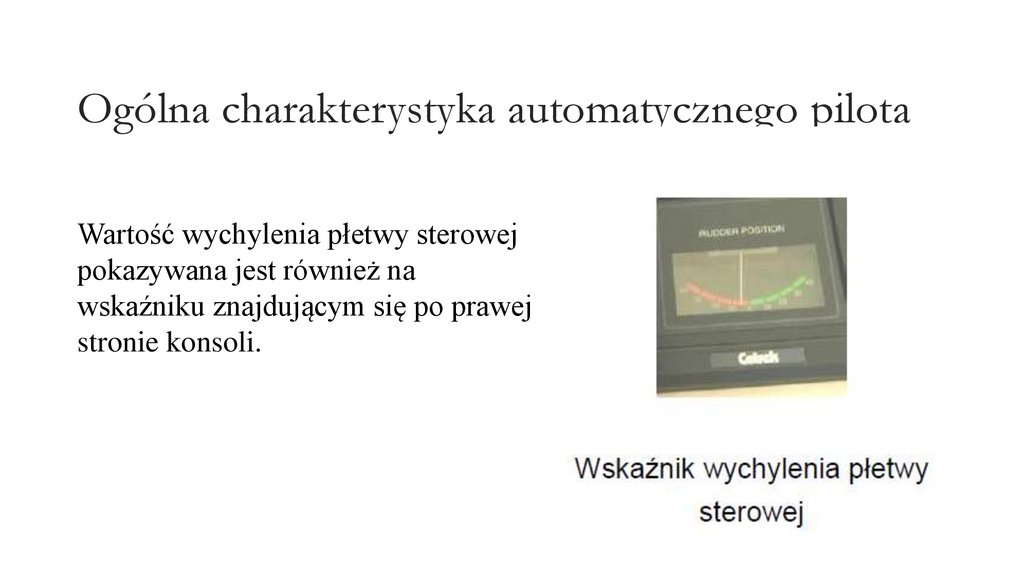
Ogólna charakterystyka automatycznego pilotaWartość wychylenia płetwy sterowej
pokazywana jest również na
wskaźniku znajdującym się po prawej
stronie konsoli.
15.
Metody sterowania1. Automatyczne
2. Sterowanie ręczne
3. Sterowanie chwilowe –awaryjne
16.
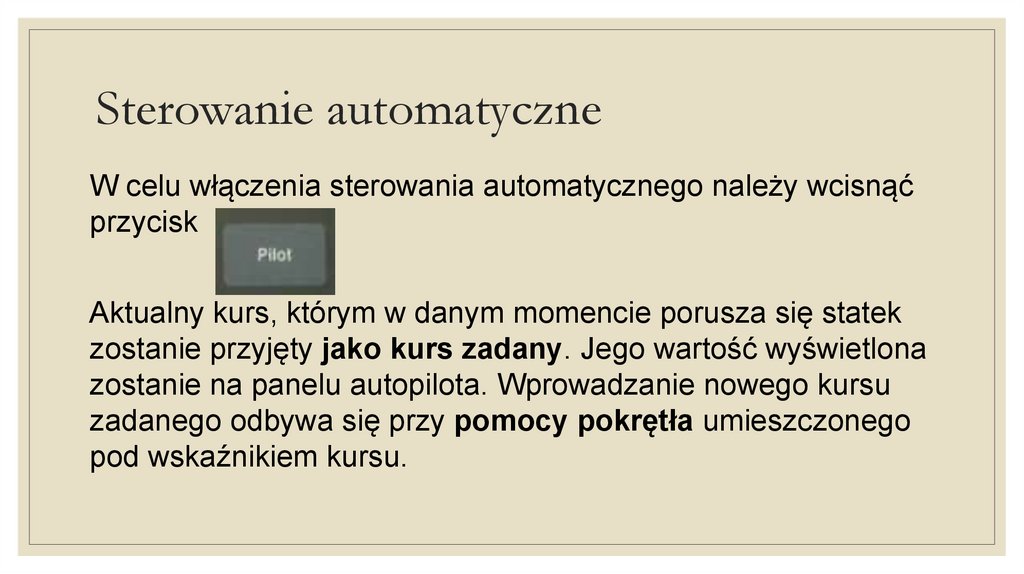
Sterowanie automatyczneW celu włączenia sterowania automatycznego należy wcisnąć
przycisk
Aktualny kurs, którym w danym momencie porusza się statek
zostanie przyjęty jako kurs zadany. Jego wartość wyświetlona
zostanie na panelu autopilota. Wprowadzanie nowego kursu
zadanego odbywa się przy pomocy pokrętła umieszczonego
pod wskaźnikiem kursu.
17.
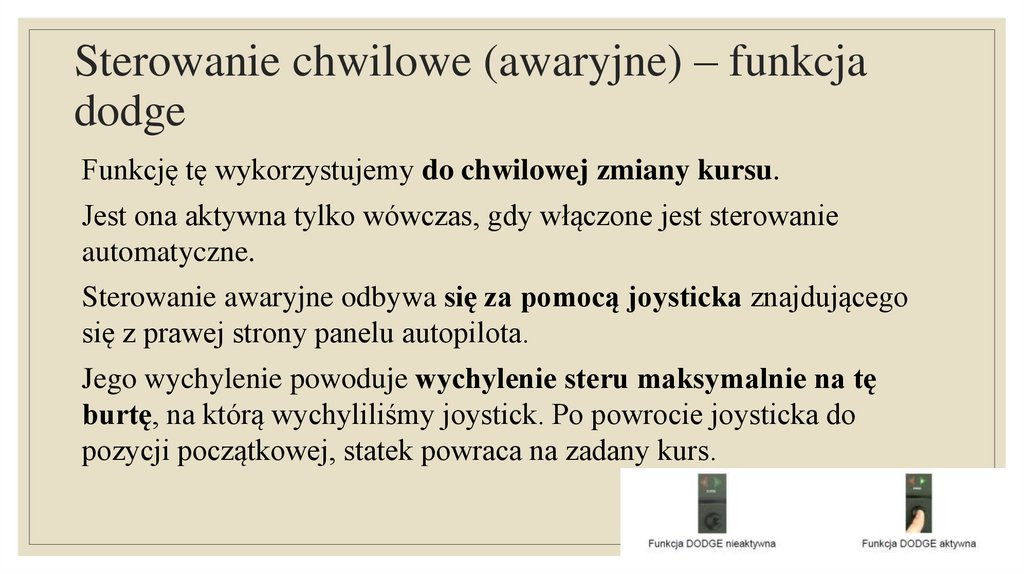
Sterowanie chwilowe (awaryjne) – funkcjadodge
Funkcję tę wykorzystujemy do chwilowej zmiany kursu.
Jest ona aktywna tylko wówczas, gdy włączone jest sterowanie
automatyczne.
Sterowanie awaryjne odbywa się za pomocą joysticka znajdującego
się z prawej strony panelu autopilota.
Jego wychylenie powoduje wychylenie steru maksymalnie na tę
burtę, na którą wychyliliśmy joystick. Po powrocie joysticka do
pozycji początkowej, statek powraca na zadany kurs.
18.
1. Cel ćwiczeniaCelem ćwiczenia jest zapoznanie się z parametrami
regulacyjnymi autopilotów.
Ćwiczenie składa się z dwóch części. Pierwsza obejmuje
zaznajomienie się z wyglądem panelu autopilota, metodami
sterowania statkiem i sposobem ich wyboru. Druga część ćwiczenia
polega na analizie wpływu zmian podstawowych parametrów
regulacyjnych na proces automatycznego sterowania statkiem.
19.
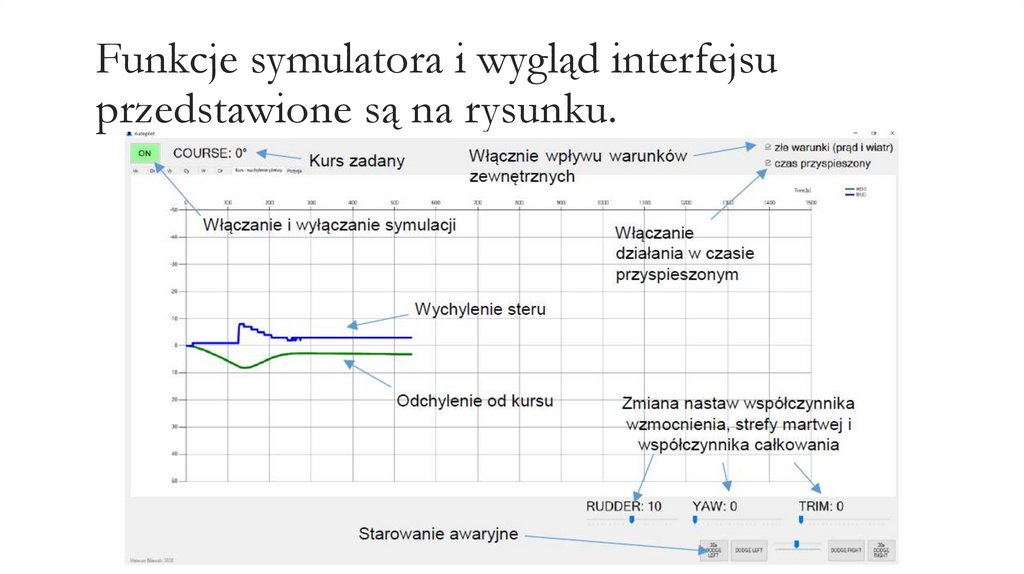
Symulator komputerowySymulator komputerowy pozwala na analizę wpływu zmiany nastaw
podstawowych parametrów regulacyjnych na proces sterowania
automatycznego.
20.
Funkcje symulatora i wygląd interfejsuprzedstawione są na rysunku.
21.
Wytyczne do sprawozdaniaSprawozdanie składa się z części:
1. Wstępnej, która obejmuje: imię, nazwisko i grupę osoby wykonującej
ćwiczenie, datę wykonania ćwiczenia,
◦ temat ćwiczenia,
◦ cel ćwiczenia,
◦ opis układu pomiarowego,
◦ opis metod sterowania statkiem morskim.
22.
Wytyczne do sprawozdania2. Przebieg ćwiczenia-praktyczna.
Drugą część sprawozdania należy sporządzić na podstawie zadań wykonanych w
dołączonym programie do symulacji autopilota, która obejmuje:
◦ opis wykonywanych czynności na symulatorze,
◦ tabele z danymi i uzyskane wykresy,
◦ analizę otrzymanych wyników.
3. Wnioski
Sprawozdania piszemy indywidualnie!!!
23.
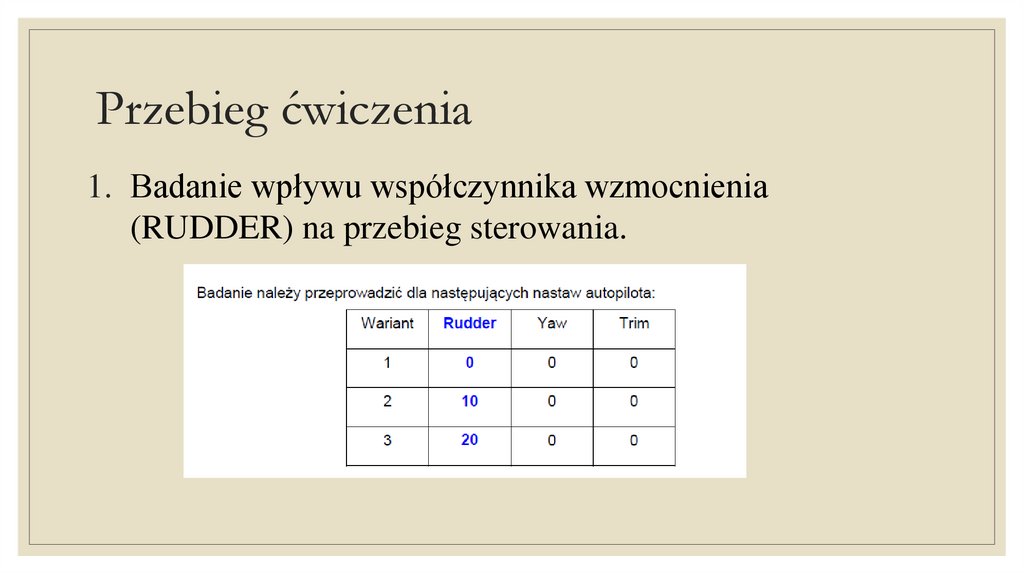
Przebieg ćwiczenia1. Badanie wpływu współczynnika wzmocnienia
(RUDDER) na przebieg sterowania.
24.
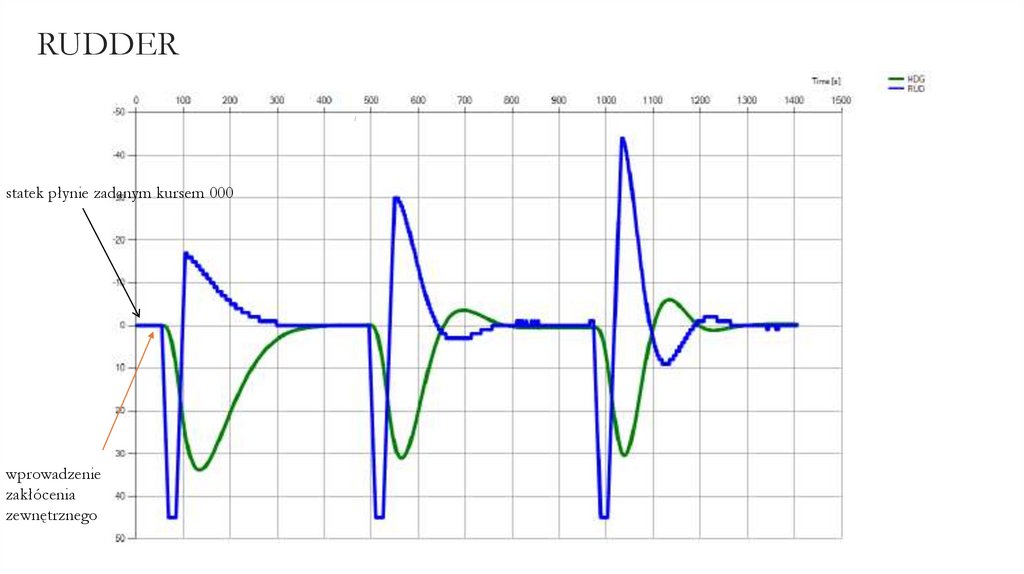
RUDDERstatek płynie zadanym kursem 000
wprowadzenie
zakłócenia
zewnętrznego
25.
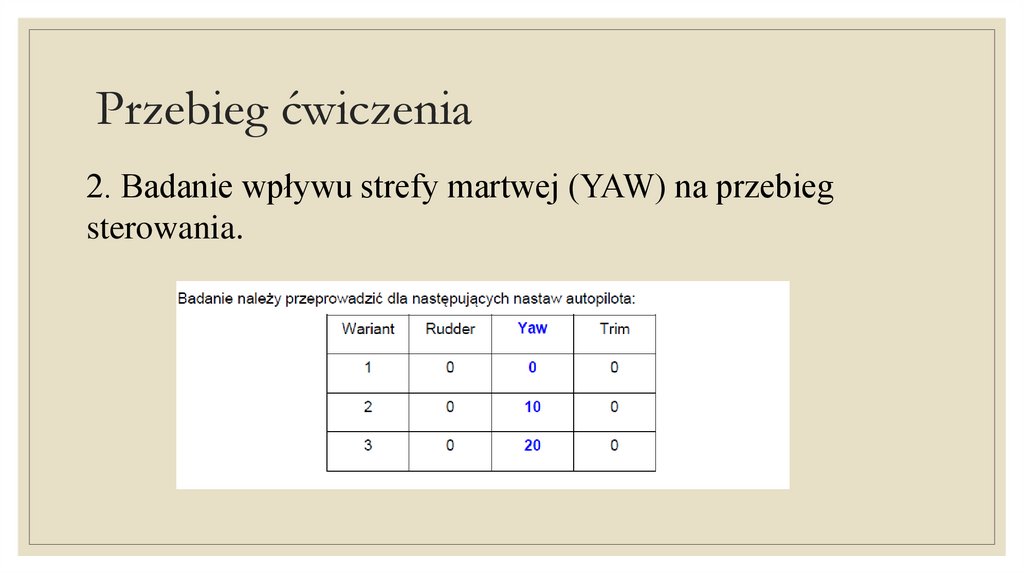
Przebieg ćwiczenia2. Badanie wpływu strefy martwej (YAW) na przebieg
sterowania.
26.
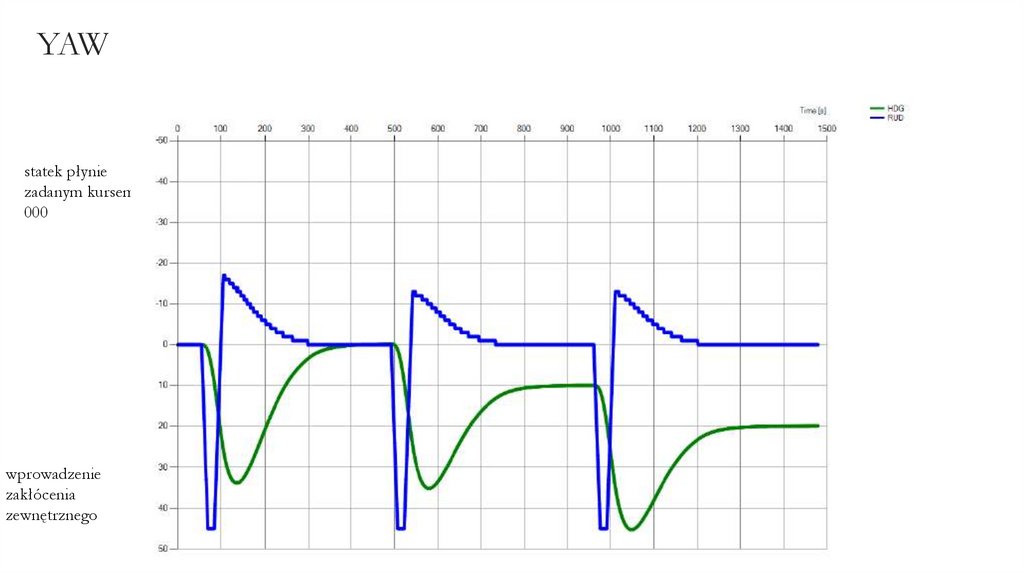
YAWstatek płynie
zadanym kursem
000
wprowadzenie
zakłócenia
zewnętrznego
27.
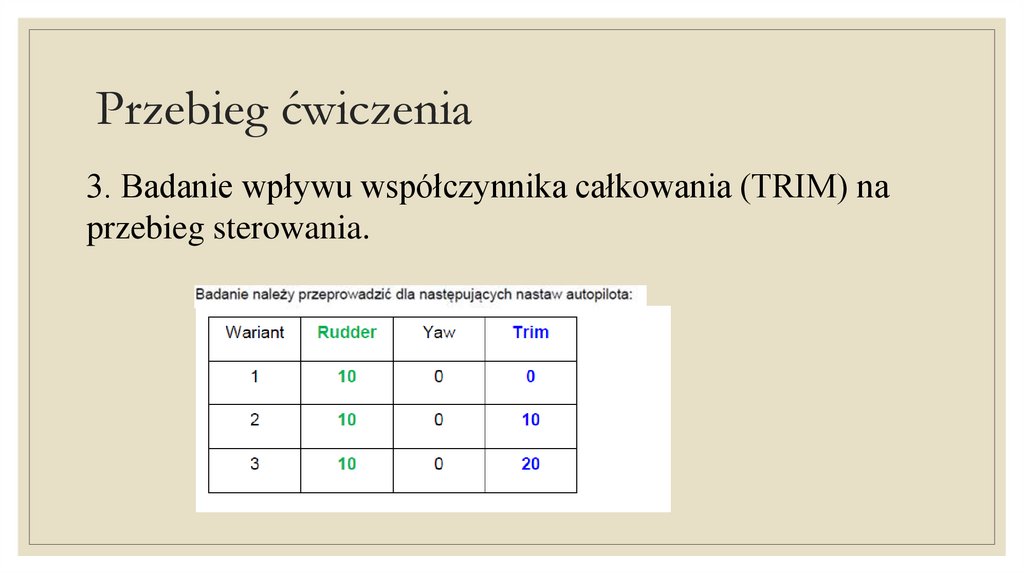
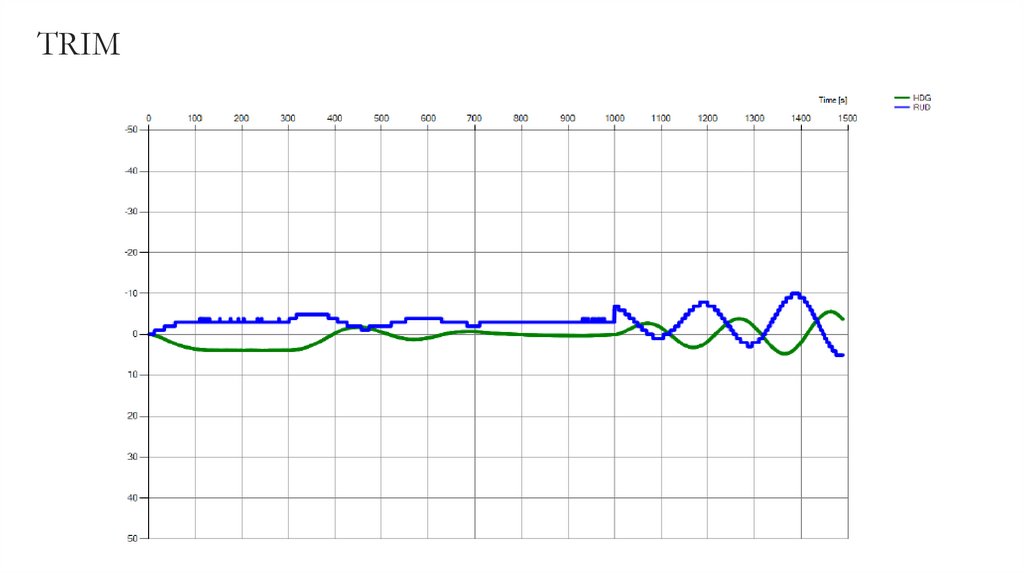
Przebieg ćwiczenia3. Badanie wpływu współczynnika całkowania (TRIM) na
przebieg sterowania.