


























 Промышленность
ПромышленностьПохожие презентации:










Стабилизирующие и управляющие поверхности. Механизация крыла. Основы аэродинамики
1.
ОСНОВЫ АЭРОДИНАМИКИЛЕКЦИЯ № 9
Тема 8
Стабилизирующие и управляющие поверхности.
Механизация крыла
2.
Л № 9 Рассматриваемые вопросы2
9.1 Назначение и виды стабилизирующих и управляющих
поверхностей.
9.2 Аэродинамические характеристики несущей поверхности с
отклонённым рулём.
9.3 Шарнирный момент.
9.4 Аэродинамическая компенсация.
9.5 Назначение и виды механизации крыла.
9.6 Аэродинамические характеристики крыла с отклонённой
механизацией.
9.7 Влияние близости земли на аэродинамические характеристики
крыла.
Литература:
1. Гарбузов В. М., Ермаков А. Л., Кубланов М. С., Ципенко В. Г.
Аэромеханика: Учебник для студентов вузов гражданской авиации – М.:
МГТУГА, 2000, 288 с.
2. Логвинов И. И. Аэромеханика: Учебное пособие М. Иркутск: ИГТУ,
1998, 144 с.
3. Ништ М. И. Аэродинамика летательных аппаратов. Учебник для ВУЗов.
М.: ВВИА имени проф. Н. Е. Жуковского, 1994, 570 с.
3.
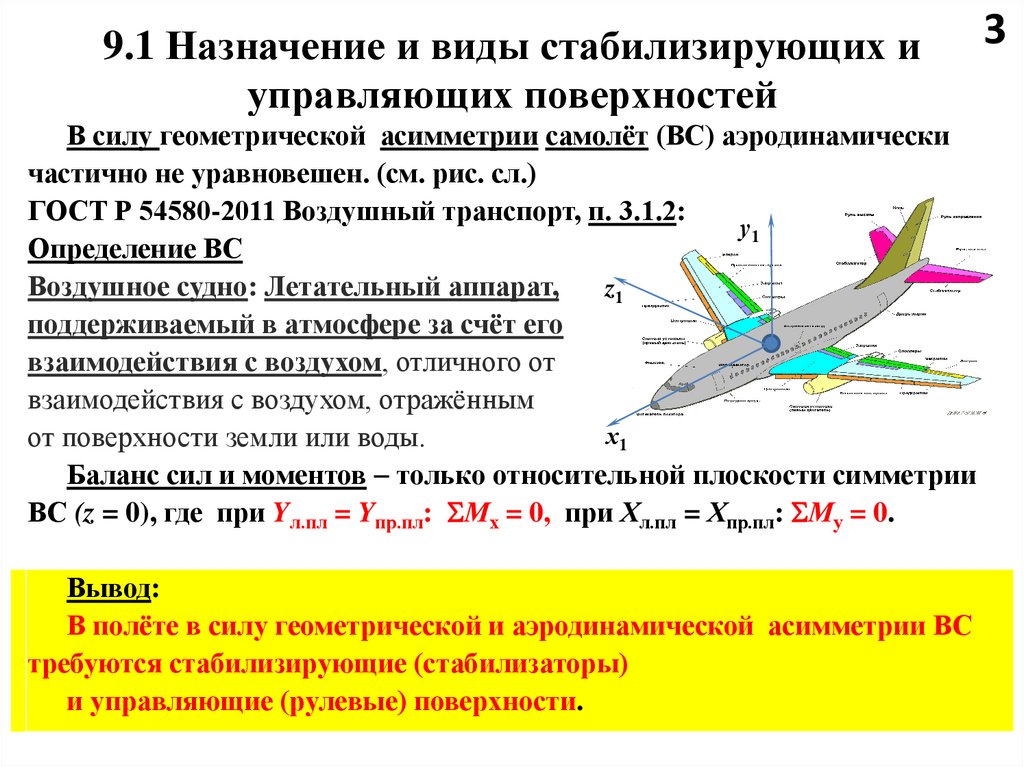
9.1 Назначение и виды стабилизирующих иуправляющих поверхностей
В силу геометрической асимметрии самолёт (ВС) аэродинамически
частично не уравновешен. (см. рис. сл.)
ГОСТ Р 54580-2011 Воздушный транспорт, п. 3.1.2:
у1
Определение ВС
Воздушное судно: Летательный аппарат,
z1
поддерживаемый в атмосфере за счёт его
взаимодействия с воздухом, отличного от
взаимодействия с воздухом, отражённым
х1
от поверхности земли или воды.
Баланс сил и моментов только относительной плоскости симметрии
ВС (z = 0), где при Yл.пл = Yпр.пл: Мх = 0, при Хл.пл = Хпр.пл: Му = 0.
Вывод:
В полёте в силу геометрической и аэродинамической асимметрии ВС
требуются стабилизирующие (стабилизаторы)
и управляющие (рулевые) поверхности.
3
4.
9.1п Назначение и виды стабилизирующихповерхностей
4
Определение:
Стабилизирующие поверхности поверхности,
обеспечивающие ВС в полёте устойчивое исходное его
положение в пространстве при отсутствии управляющего
или внешнего воздействия.
Виды стабилизирующих поверхностей:
по выбору оси стабилизации
оси аппликат стабилизаторы (гориз. оперение);
оси ординат кили (вертик. оперение), фальшкили;
оси абсцисс все несущие поверхности, кроме фюзеляжа;
Примечание: в покое стабилизирующими также являются все
рулевые поверхности и триммеры.
5.
9.1п Внешний вид стабилизирующихповерхностей
.
5
6.
Обозначения - самостоятельно№ Наименование
п/п
1 Стабилизатор (горизонтальное оперение)
2
Руль высоты
3
……..
4
……..
5
………
6
……….
7
……...
8
9
.........
........
Примечание
5п
7.
69.1п Рабочий процесс стабилизации ВС
Изменение углов атаки (скольжения ) или
отклонение рулевых поверхностей (рулей)
вызывает нестационарные демпфирующие
аэродинамические моменты, препятствующие
вращению ВС относительно центра масс.
Управляемость ВС снижается (ухудшается).
Как следствие, возрастает устойчивость ВС в
полёте стремление сохранить исходное
положение ВС, заданное накануне исходного
воздействия.
Рабочим инструментом такой тенденции ВС
являются стабилизирующие поверхности,
включая их рули в неподвижном состоянии.
Проблема сущность рабочего процесса.
8.
9.1п Сущность рабочего процессастабилизирующих поверхностей
Сравним две кинематические модели:
изолированного профиля крыла с САХ;
7
профиля крыла в системе ВС ( с гор. оперением).
V
Mz п ц.м Mz
хт
хF
Y
Y
F
ц.д
R
хF –хт > 0 : Mz < 0: Стабилизация есть!!!
X
хF - хт
хц.д
Mzст
Yст
Yст
9.
9.1п Сущность рабочего процессауправляющих поверхностей
Определение:
Управляющая поверхность малогабаритная
аэродинамическая поверхность, вынесенная за пределы
центра масс, создающая управляющую силу и момент,
способные повернуть ВС в задаваемом направлении
относительно выбранной оси (в заданное положение).
Типовые направления управления ВС:
1. По углу тангажа (в плоскости симметрии = f(угла атаки )).
2. По углу рыскания ( в плоскости крыла) = f(скольжения )).
3. По углу крена ( относительно продольной оси ВС).
10.
9.1п Управляющие закономерностиОбеспечивают создание управляющих
аэродинамических сил и моментов:
ρV 2
M x mx
Sl аэродинамический момент крена;
2
ρV 2
M y my
Sl аэродинамический момент рыскания;
2
ρV 2
M z mz
SbА аэродинамический момент тангажа.
2
где
11.
9.1п Типовые стабилизирующие и рулевыеповерхности
.
12.
9.2 Аэродинамические характеристики несущейповерхности с отклонённым рулём
Рабочий процесс аэродинамических характеристик несущей
поверхности с отклонённым рулём подобен РП АХ крыла с
отклонённым поворотным закрылком. А именно:
су су ( 0 ).
mz mz 0 с ya ( xF xц.м ).
13.
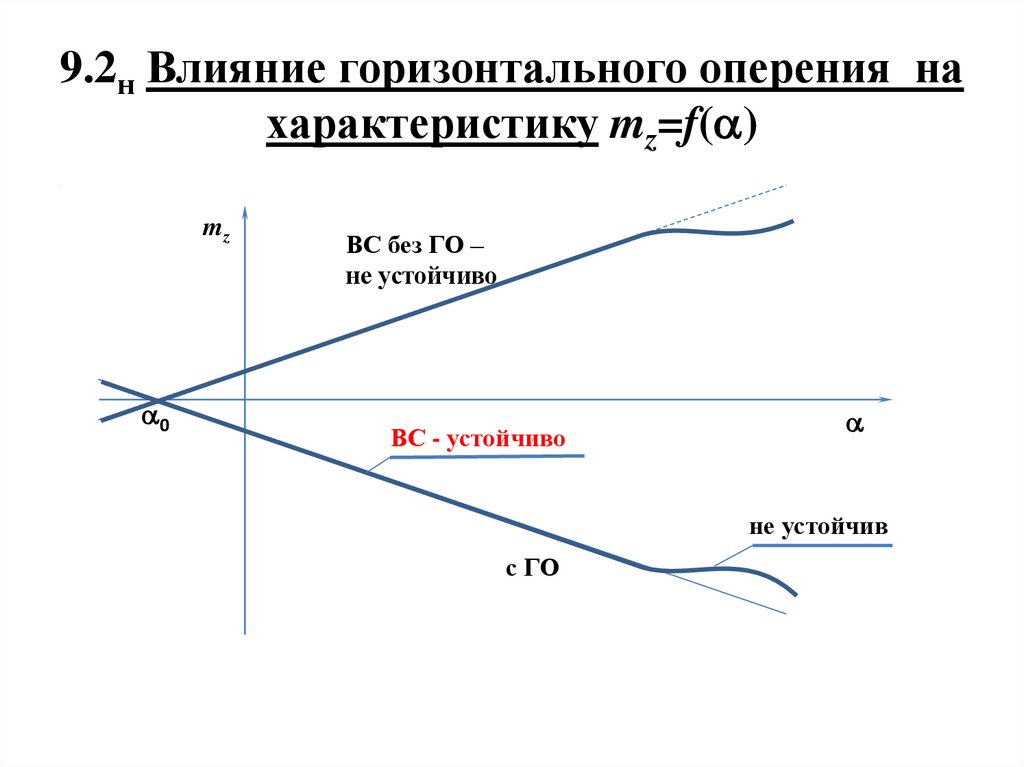
9.2н Влияние горизонтального оперения нахарактеристику mz=f( )
.
mz
0
ВС без ГО –
не устойчиво
ВС - устойчиво
не устойчив
с ГО
14.
Аэродинамическая характеристика крыла сотклоняющимся рулём (стабилизатором)
.
су
с ГО
р2 > 0
р1=0
р3<0
0
устойчив
mz
mz
н.с кр
не устойчив
15.
Особенности протекания аэродинамическиххарактеристик крыла с рулевой поверхностью
1. Нулевой угол атаки 0< 0.
2. В области угол атаки 0< н.с самолёт обладает
устойчивостью.
3. Срыв потока на на > н.с ведёт к потере
устойчивости самолёта.
4. Отклонение рулевой поверхности смещает
характеристики в область отрицательных углов
атаки.
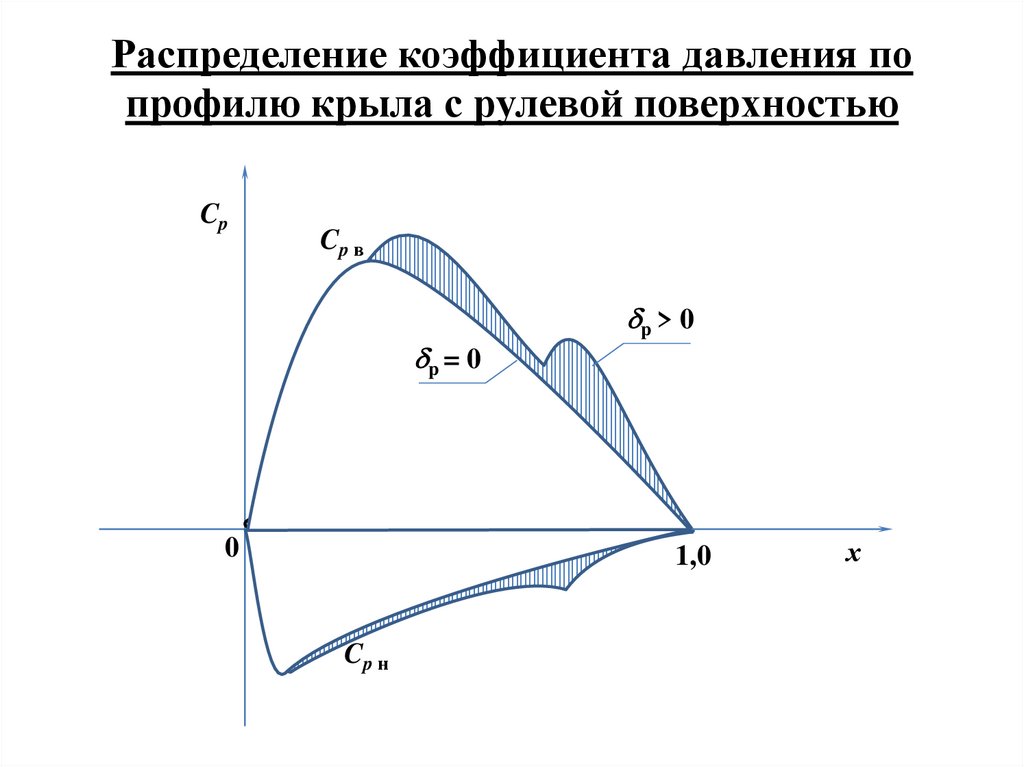
5. Распределение коэффициента по профилю
крыла показывает локальное улучшение су( р).
Смотрите след. слайд!
16.
Распределение коэффициента давления попрофилю крыла с рулевой поверхностью
.
Cp
Cp в
p = 0
0
p > 0
1,0
Cp н
х
17.
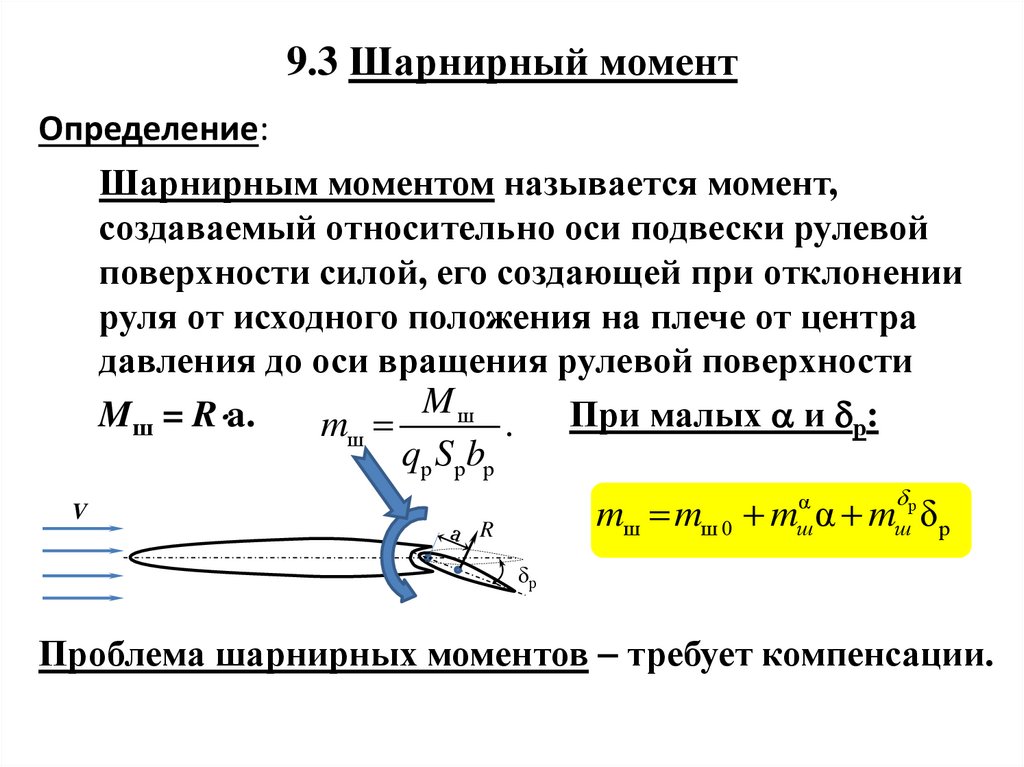
9.3 Шарнирный моментОпределение:
Шарнирным моментом называется момент,
создаваемый относительно оси подвески рулевой
поверхности силой, его создающей при отклонении
руля от исходного положения на плече от центра
давления до оси вращения рулевой поверхности
Mш
Mш = R a.
mш
. При малых и р:
qр Sрbр
V
р
mш mш 0 m α mш δр
α
ш
R
р
Проблема шарнирных моментов требует компенсации.
18.
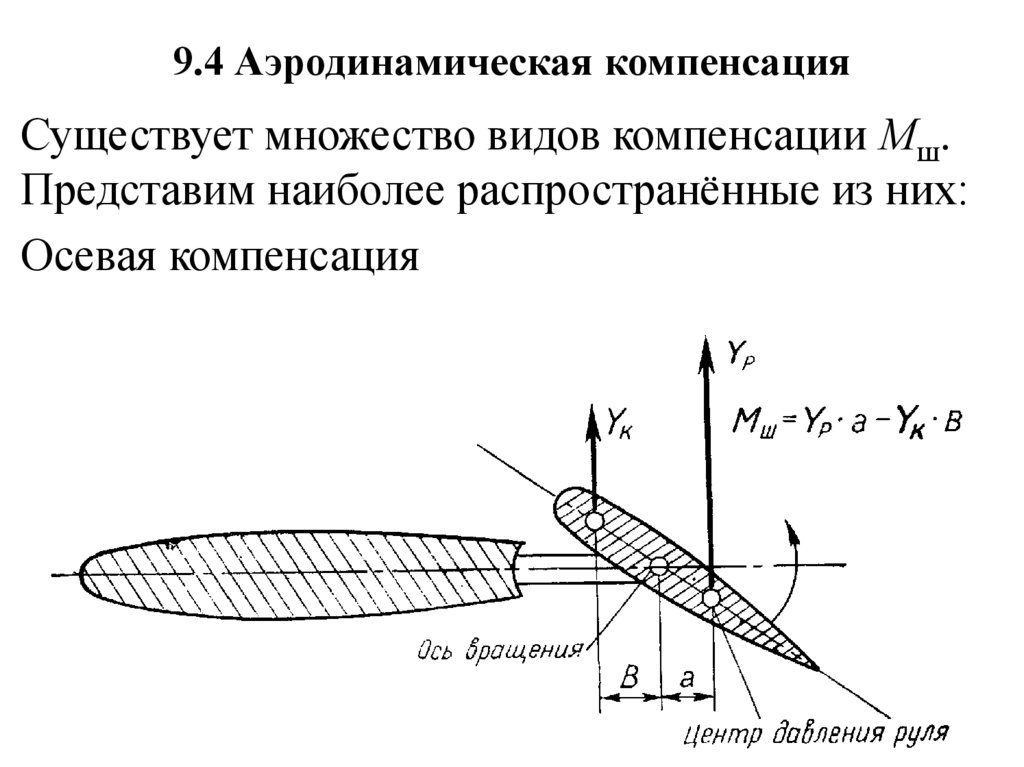
9.4 Аэродинамическая компенсацияСуществует множество видов компенсации Мш.
Представим наиболее распространённые из них:
Осевая компенсация
19.
Стабилизирующие и рулевые поверхности.
20.
9.4п Аэродинамическая компенсацияКомпенсация с применением тримерного
эффекта:
21.
9.4п Аэродинамическая компенсация• Внутренняя компенсация
Мк
Тяга
рулевая
Шарнир
Рычаг
Шарнир тяги
22.
9.4п Аэродинамическая компенсацияРоговая компенсация
23.
9.4п Аэродинамическая компенсация24.
9.5 Назначение и виды механизации крылаВиды механизации крыла
Назначение: 1. Увеличить Y (су)при том же угле атаки!
2. Добиться плавного (безотрывного) обтекания крыла!
3. Уменьшить скорость отрыва и посадки ВС и LВПП. ...
25.
9.5п Аэродинамические характеристики:Щиток
су
су
з= 0
з> 0
i н.с кр
26.
9.5п Вид механизации: Двойной выдвижнойщелевой закрылок
.
су
су
з> 0
з= 0
т
н.с
кр
27.
9.5п Виды механизации. Крыло с предкрылком(самостоятельно)
Виды механизации крыла: Крыло с предкрылком.
Исследуемое
крыло
су
з= 0
су
Стало
Исходное
крыло
пр=0
Было
тек н.с н.с кр
28.
Самостоятельно продолжить построение остальныххарактеристик крыла с его механизацией
29.
9.6 Аэродинамические характеристики крыла сотклонённой механизацией
Аэродинамические характеристики крыла с отклонённой
механизацией частично представлены выше при рассмотрении видов
механизации крыла в виде зависимостей коэффициента подъёмной
силы от угла атаки и других параметров.
Особенности сущности рабочего процесса создания подъёмной
силы заключены в следующих эффектах:
1. При неизменном угле атаки базовой части крыла его условный
угол атаки возрастает, так как задняя кромка закрылка (щитка, ...)
опускается вниз и изменяет положение хорды крыла по её
определению.
2. Выдвижение закрылка увеличивает эффективную площадь крыла.
3. Перед отклонённым закрылком увеличивается статическое
давление набегающего потока, что частично определяет прирост
подъёмной силы.
4. Увеличение кинетической энергии потока за предкрылком и
щелевым закрылком обеспечивает сдув срывных зон и повышение
коэффициента су. И др..... (самостоятельно)
30.
9.7 Влияние близости земли нааэродинамические характеристики крыла
Сущность рабочего процесса интерференции крыла с подстилающей
поверхностью заключены в зеркальном эффекте крыла у плоского экрана –
«зеркала». А именно:
1. Эффект проявляется при малых высотах расположения крыла у экрана в
диапазоне от одной до нескольких хорд крыла (САХ).
2. Реализуется эффект поджатия струек тока потока под крылом к
плоскости экрана, их дросселирование и торможения их потока, что
частично даёт прирост в подъёмной силе за счёт положительного
избыточного давления.
3. Реализуется эффект перетекания потока из области под крылом в
область над крылом, активного увеличения разрежения и прироста
подъёмной силы.
4. Реализуется эффект сдува пограничного слоя и срывных зон и
увеличения углов атаки начала срыва.
5. Реализуется эффект прироста подсасывающей силы за счёт увеличения
разрежения у носка крыла, дающий прирост его качества.
Примечание: Близость крыла к подстилающей поверхности земли снижает
безопасность полёта. Далее см. материал на доске и слушай устное изложение от преподавателя.
31.
Для ознакомления: 1 Управляющие поверхности ВС• Угловые отклонения обычных управляемых
стабилизаторов находятся в диапазоне φст = 10...30°.Углы
отклонения дифференциального стабилизатора имеют
больший диапазон: ст.диф =15...35°. Скорости отклонения
стабилизатора изменяются в широких пределах в
зависимости от запасов устойчивости самолёта и степени
автоматизации управления. Ориентировочно
ст=З5...60◦/с (для манёвренных самолётов).
• Управление тягой и вектором тяги, струйные рули. К
этому виду дополнительного продольного управления в
последнее время появился большой интерес в связи с
освоением манёвренными самолётами новых режимов
полёта, в котором аэродинамические органы управления
становятся малоэффективными. Это в основном полёты
на закритических углах атаки, при выполнении
специальных пилотажных режимов типа «колокол»,
«кобра», на предельно малых скоростях и других
режимах.
32.
2 Управляющие поверхности ВС• Управление вектором тяги накладывает определённые
требования к компоновке двигателей на самолёте.
Наиболее полно этому виду управления отвечает
интегральная компоновка самолёта с двигателями,
разнесёнными на некоторое расстояние от продольной
оси самолёта (самолёты Су-27, МиГ-29, F-14, F-15, F-18).
Благодаря такому разнесению двигателей может быть
осуществлено управление самолётом как по тангажу, так
и по крену.
• Органами поперечного управления самолётов могут быть:
элероны (внешние или внутренние, или те и другие
вместе); элевоны, выполняющие функции элеронов;
флапероны, выполняющие функции элеронов;
интерцепторы (спойлеры); дифференциальный
стабилизатор; поворотные концевые консоли крыла;
поворотные сопла двигателей или струйные рули;
дифференциальное изменение кривизны крыла (при
адаптивном крыле).
33.
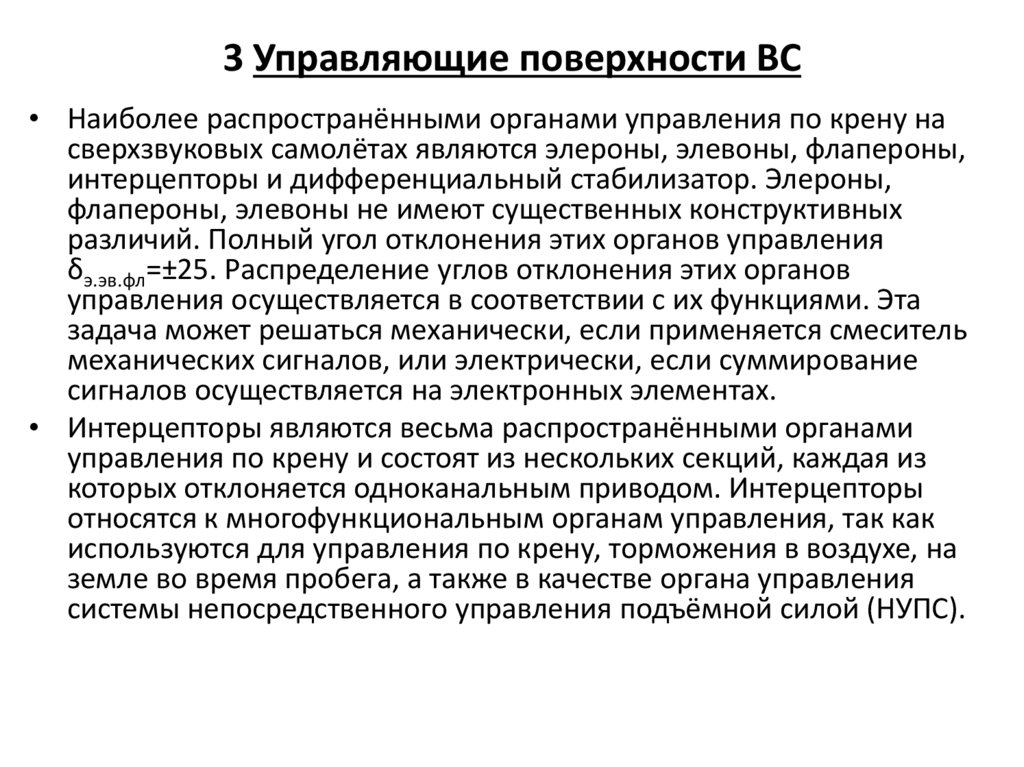
3 Управляющие поверхности ВС• Наиболее распространёнными органами управления по крену на
сверхзвуковых самолётах являются элероны, элевоны, флапероны,
интерцепторы и дифференциальный стабилизатор. Элероны,
флапероны, элевоны не имеют существенных конструктивных
различий. Полный угол отклонения этих органов управления
δэ.эв.фл=±25. Распределение углов отклонения этих органов
управления осуществляется в соответствии с их функциями. Эта
задача может решаться механически, если применяется смеситель
механических сигналов, или электрически, если суммирование
сигналов осуществляется на электронных элементах.
• Интерцепторы являются весьма распространёнными органами
управления по крену и состоят из нескольких секций, каждая из
которых отклоняется одноканальным приводом. Интерцепторы
относятся к многофункциональным органам управления, так как
используются для управления по крену, торможения в воздухе, на
земле во время пробега, а также в качестве органа управления
системы непосредственного управления подъёмной силой (НУПС).
34.
4 Управляющие поверхности ВС• При функционировании системы НУПС интерцепторы отклоняются
симметрично относительно некоторого выпущенного положения
(например, δинт= +10°). Наличие аэродинамической зоны
нечувствительности вблизи убранного положения ограничивает
возможность их использования при малых сигналах управления
(например, для демпфирования колебаний по крену). Постоянное
использование интерцепторов в полете даже при умеренных сигналах
снижает аэродинамическое качество. Поэтому на некоторых
самолётах, особенно при совместном использовании интерцепторов
и элеронов, в систему управления интерцепторами вводится зона
нечувствительности с тем, чтобы в пределах малых сигналов
(например, сигнал демпфирования) интерцепторы не работали, т.е.
демпфирование по крену осуществлялось через канал либо элеронов,
либо дифференциального стабилизатора.
• Практически все приводы интерцепторов являются однокамерными.
Питание приводов симметрично расположенных секций
интерцепторов обычно осуществляется от одной и той же
гидросистемы. В случае отказа питающей гидросистемы
интерцепторы под действием отсасывающих сил могут отходить от
убранного положения, а привод при этом работает в режиме
демпфирования
35.
5 Управляющие поверхности ВСВ качестве органов путевого управления на самолётах могут применяться руль
направления, а на земле переднее колесо шасси и дифференциальное торможение
колёс основных стоек шасси в качестве аварийного режима управления. На большинстве
современных высокоманёвренных самолётов (МиГ-29, Су-27, F-14, F-15, F-18, F-22 и др.)
применяют два киля и два руля направления. Для таких самолётов необходимо
эффективное путевое управление, для чего требуется значительная площадь
вертикального оперения: целиком управляемый киль (самолёт Ту-160). Эффект от
управляемого киля такой же, как и при управляемом стабилизаторе. Применяются также
дополнительные неподвижные или управляемые (поворотные) поверхности в нижней
части фюзеляжа; расщепляющиеся рули (В-2, «Буран», «Спейс Шаттл»); струйные рули;
носовые рули (по крену и рысканью). Угол отклонения руля направления обычно
ограничен диапазоном δр.н = 30 .
Потребная скорость отклонения киля зависит от многих факторов и составляет δк = <
20 |c.
К органам управления, используемого для повышения лётно-тактических характеристик
самолёта можно отнести; управляемые носки крыла (предкрылки); управляемые
закрылки или флапероны; крыло с изменяемой стреловидностью; интерцепторы;
тормозные щитки (воздушные тормоза); реверс тяги.
Изменение стреловидности крыла в основном предназначено для улучшения взлётнопосадочных характеристик самолёта и повышения его аэродинамического качества в
длительном полете путём оптимизации стреловидности крыла по числам М полёта. Эта
система достаточно инерционна, и для изменения конфигурации крыла требуется
достаточно много времени (скорость изменения стреловидности крыла близка к
скорости отклонения обычных закрылков, полная перекладка от min до max
36.
6 Управляющие поверхности ВС• На самолётах с изменяемой стреловидностью элероны обычно
не применяются, поскольку используются закрылки по всему
размаху крыла. Для управления по крену служат в основном
интерцепторы и дифференциальный стабилизатор. Однако при
большой стреловидности крыла (χ>50°) интерцепторы
становятся малоэффективными, и они обычно отключаются.
После этого управление по крену производится только
дифференциальным стабилизатором (самолёты МиГ-23, Су-24,
F-11I, F-14).
• Следует отметить, что дифференциальный стабилизатор, как
орган управления по крену, играет весьма важную роль на
высокоманёвренных самолётах, которые используют для
манёвров большие углы атаки (самолёты Су-27, МиГ-29, F-16, F15 и др.). На этих самолётах при выходе на закритические углы
атаки эффективность канала управления элеронами
(флаперонами) уменьшается, и по сигналам угла атаки их
отклонение становился практически нулевым, а управление на
этих режимах производится только с помощью
дифференциального стабилизатора и руля направления.
37.
7 Управляющие поверхности ВС• В качестве органов путевого управления на самолётах могут
применяться руль направления, а на земле переднее колесо
шасси и дифференциальное торможение колёс основных стоек
шасси в качестве аварийного режима управления. На
большинстве современных высокоманёвренных самолётов
(МиГ-29, Су-27, F-14, F-15, F-18, F-22 и др.) применяют два киля
и два руля направления. Для таких самолётов необходимо
эффективное путевое управление, для чего требуется
значительная площадь вертикального оперения: целиком
управляемый киль (самолёт Ту-160). Эффект от управляемого
киля такой же, как и при управляемом стабилизаторе.
Применяются также дополнительные неподвижные или
управляемые (поворотные) поверхности в нижней части
фюзеляжа; расщепляющиеся рули (В-2, «Буран», «Спейс
Шаттл»); струйные рули; носовые рули (по крену и рысканью).
Угол отклонения руля направления обычно ограничен
диапазоном δр.н= 30 .
• Потребная скорость отклонения киля зависит от многих
факторов и составляет δк= 20 .
38.
8 Управляющие поверхности ВС• К органам управления, используемого для повышения лётнотактических характеристик самолёта можно отнести;
управляемые носки крыла (предкрылки); управляемые
закрылки или флапероны; крыло с изменяемой
стреловидностью; интерцепторы; тормозные щитки
(воздушные тормоза); реверс тяги.
• Изменение стреловидности крыла в основном предназначено
для улучшения взлётно-посадочных характеристик самолёта и
повышения его аэродинамического качества в длительном
полете путём оптимизации стреловидности крыла по числам М
полёта. Эта система достаточно инерционна, и для изменения
конфигурации крыла требуется достаточно много времени
(скорость изменения стреловидности крыла близка к скорости
отклонения обычных закрылков, полная перекладка от min
до max осуществляется за 20...30 с).
39.
9 Управляющие поверхности ВСНа современных манёвренных самолётах (МиГ-29, Су-27, F-16, F-15, F-14)
носки (предкрылки) крыла и закрылки помимо выполнения традиционной
функции по снижению взлётно-посадочных скоростей самолёта стали широко
использоваться для повышения манёвренных возможностей самолёта. В
связи с этим значительно увеличена скорость их отклонения, которая
соизмерима со скоростью отклонения основных органов (в темпе коротко
периодического движения самолёта), и расширен диапазон их применения
по числам М полёта. Эта система достаточно инерционна, и для изменения
конфигурации крыла требуется достаточно много времени (скорость
изменения стреловидности крыла близка к скорости отклонения обычных
закрылков, полная перекладка от min до max осуществляется за 20...30 с).На
современных манёвренных самолётах (МиГ-29, Су-27, F-16, F-15, F-14) носки
(предкрылки) крыла и закрылки помимо выполнения традиционной функции
по снижению взлётно-посадочных скоростей самолёта стали широко
использоваться для повышения манёвренных возможностей самолёта. В
связи с этим значительно увеличена скорость их отклонения, которая
соизмерима со скоростью отклонения основных органов (в темпе коротко
периодического движения самолёта), и расширен диапазон их применения
по числам М Полёта. Эти органы управления обычно отклоняются
автоматически по сигналам угла атаки и перегрузки, т.е, δпр.з = f( , n)
40.
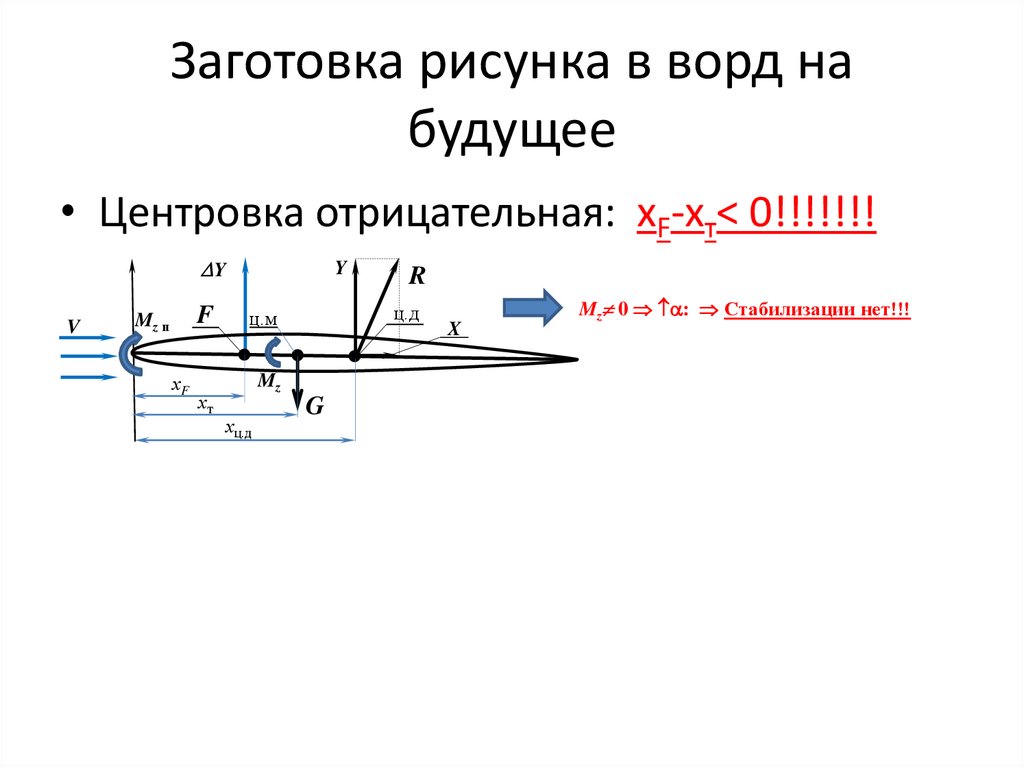
Заготовка рисунка в ворд набудущее
• Центровка отрицательная: хF-xт< 0!!!!!!!
Y
V
F
Mz п
хF
хт
Y
ц.д
ц.м
Mz
хц.д
R
G
X
Mz 0 : Стабилизации нет!!!