











 Физика
ФизикаПохожие презентации:










Механические колебания
1.
Механические колебания1. Виды и признаки колебаний
2. Параметры гармонических колебаний
3. Графики смещения скорости и ускорения
4. Основное уравнение динамики гармонических колебаний
5. Энергия гармонических колебаний
6. Гармонический осциллятор
7. Способы представления гармонических колебаний
8. Сложение гармонических колебаний. Биения
9. Сложение взаимно перпендикулярных колебаний
10. Фигуры Лиссажу
11. Свободные затухающие механические колебания
12. Коэффициент затухания и логарифмический декремент
затухания
13. Вынужденные механические колебания
14. Автоколебания
2.
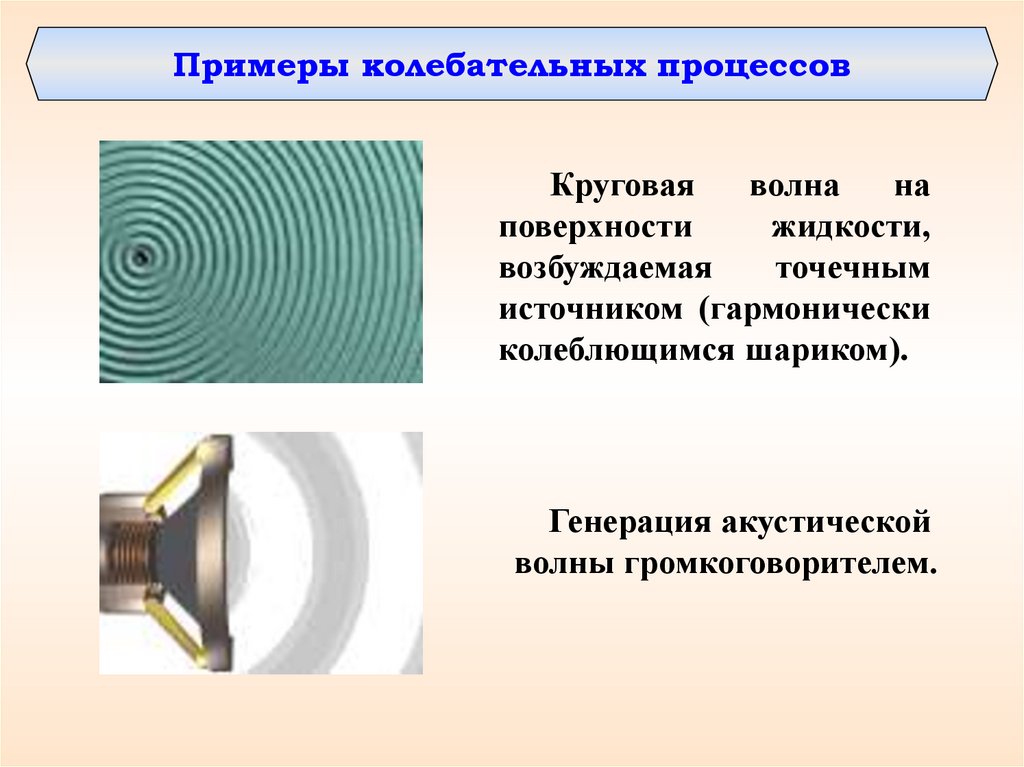
Примеры колебательных процессовКруговая
волна
на
поверхности
жидкости,
возбуждаемая
точечным
источником (гармонически
колеблющимся шариком).
Генерация акустической
волны громкоговорителем.
3.
Примеры колебательных процессовПоперечная волна в сетке,
состоящей
из
шариков,
скреплённых
пружинками.
Колебания масс происходят
перпендикулярно направлению
распространения волны.
Возможные типы колебаний
атомов в кристалле.
4.
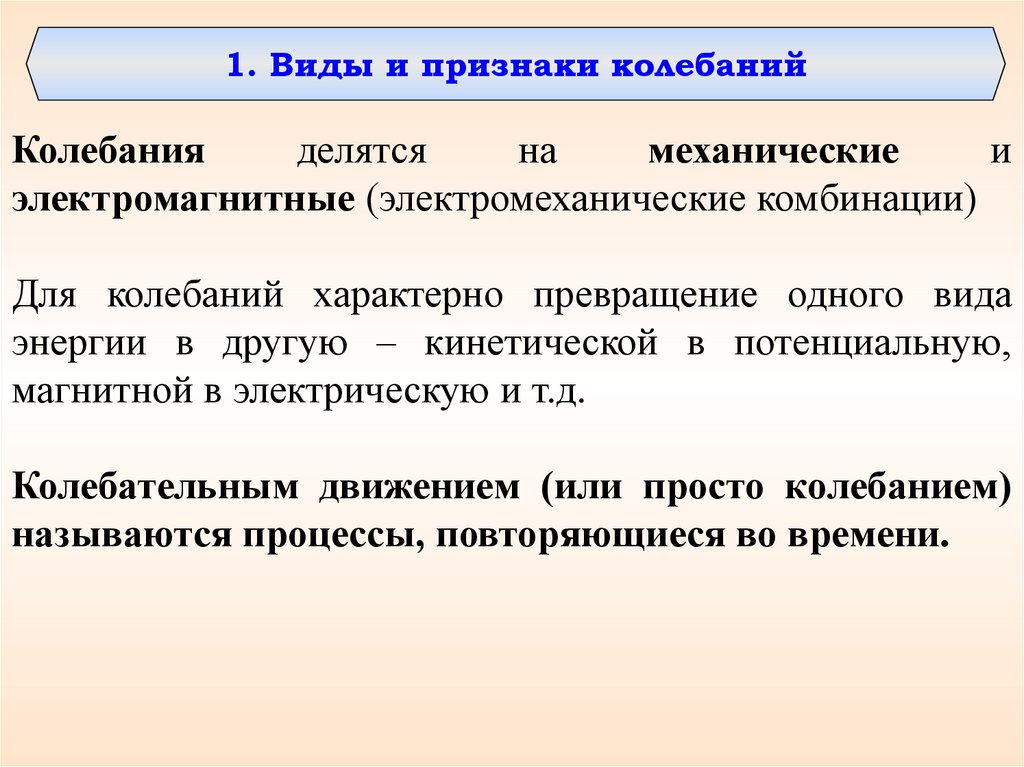
1. Виды и признаки колебанийКолебания
делятся
на
механические
и
электромагнитные (электромеханические комбинации)
Для колебаний характерно превращение одного вида
энергии в другую – кинетической в потенциальную,
магнитной в электрическую и т.д.
Колебательным движением (или просто колебанием)
называются процессы, повторяющиеся во времени.
5.
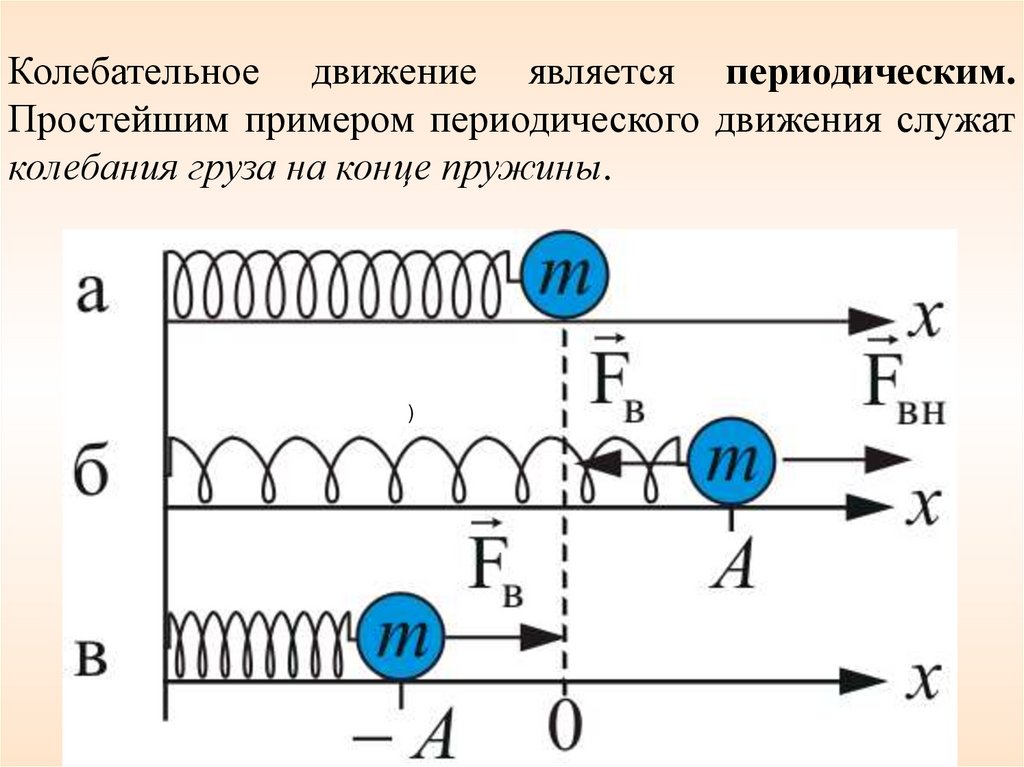
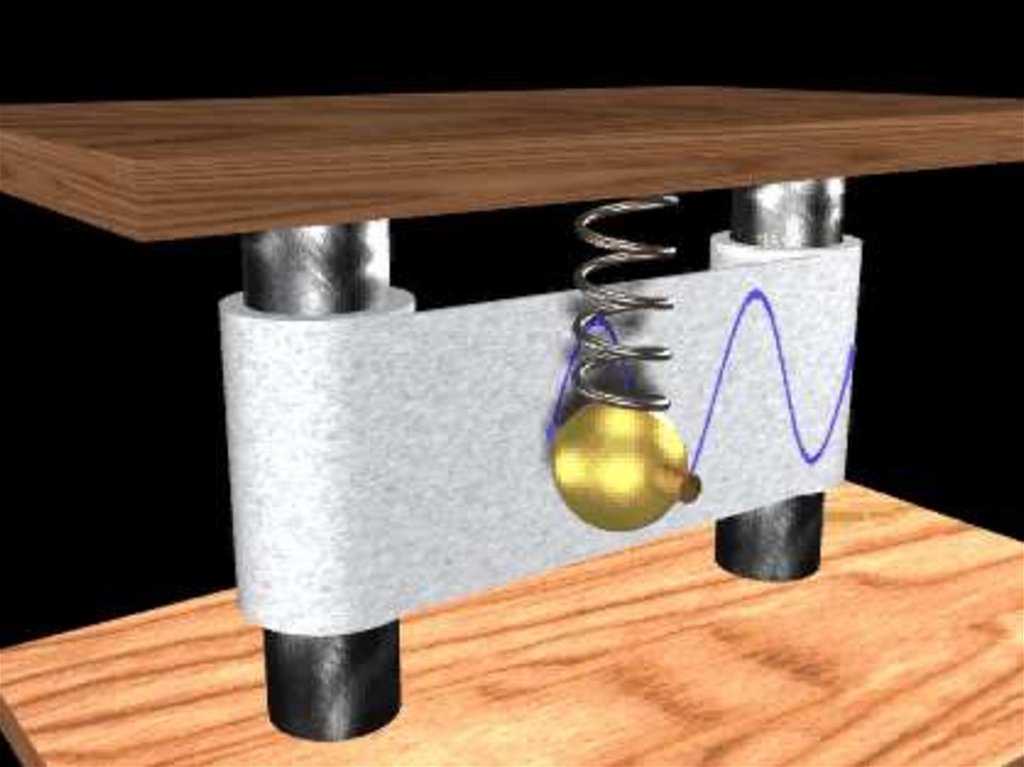
Колебательное движение является периодическим.Простейшим примером периодического движения служат
колебания груза на конце пружины.
)
6.
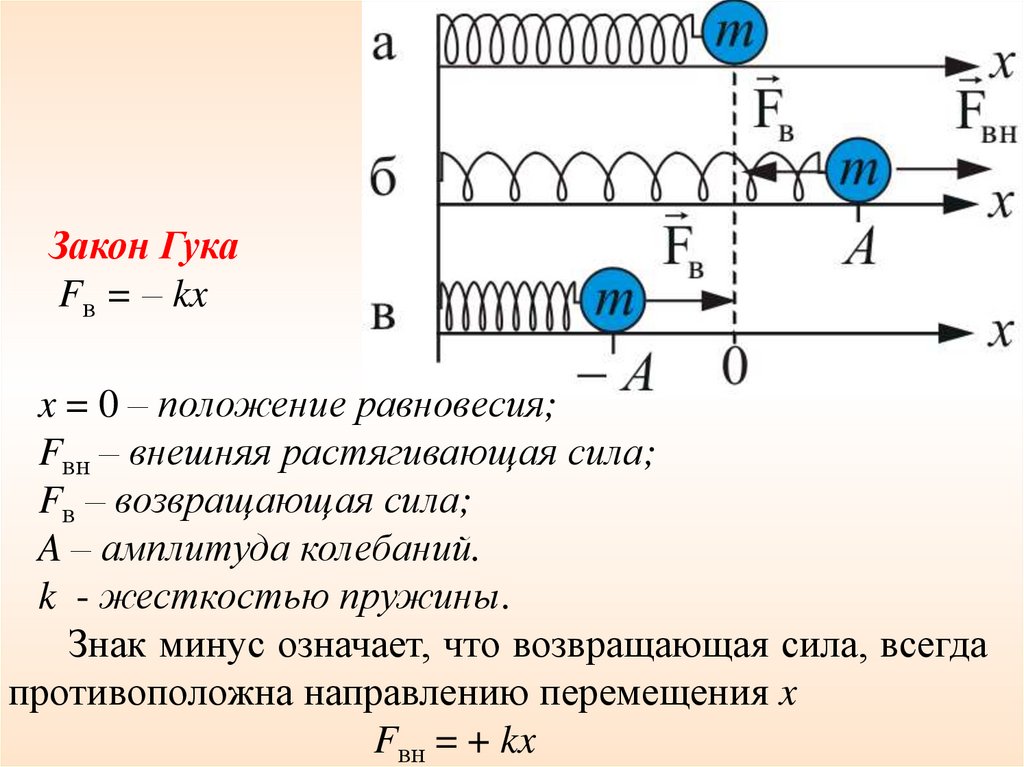
Закон ГукаFв = – kx
x = 0 – положение равновесия;
Fвн – внешняя растягивающая сила;
Fв – возвращающая сила;
A – амплитуда колебаний.
k - жесткостью пружины.
Знак минус означает, что возвращающая сила, всегда
противоположна направлению перемещения x
Fвн = + kx
7.
Три признака колебательного движения:повторяемость (периодичность) – движение по
одной и той же траектории туда и обратно;
ограниченность пределами крайних положений;
действие силы, описываемой функцией F = – kx.
8. Примеры колебательных процессов
Опыт Кавендиша9.
Колебания называются периодическими, еслизначения физических величин, изменяющихся в процессе
колебаний, повторяются через равные промежутки
времени.
•Простейшим типом периодических колебаний являются
так называемые гармонические колебания.
•Любая колебательная система, в которой возвращающая
сила прямо пропорциональна смещению, взятому с
противоположным знаком (например,
F = – kx),
совершает гармонические колебания.
•Саму такую систему часто называют гармоническим
осциллятором.
10.
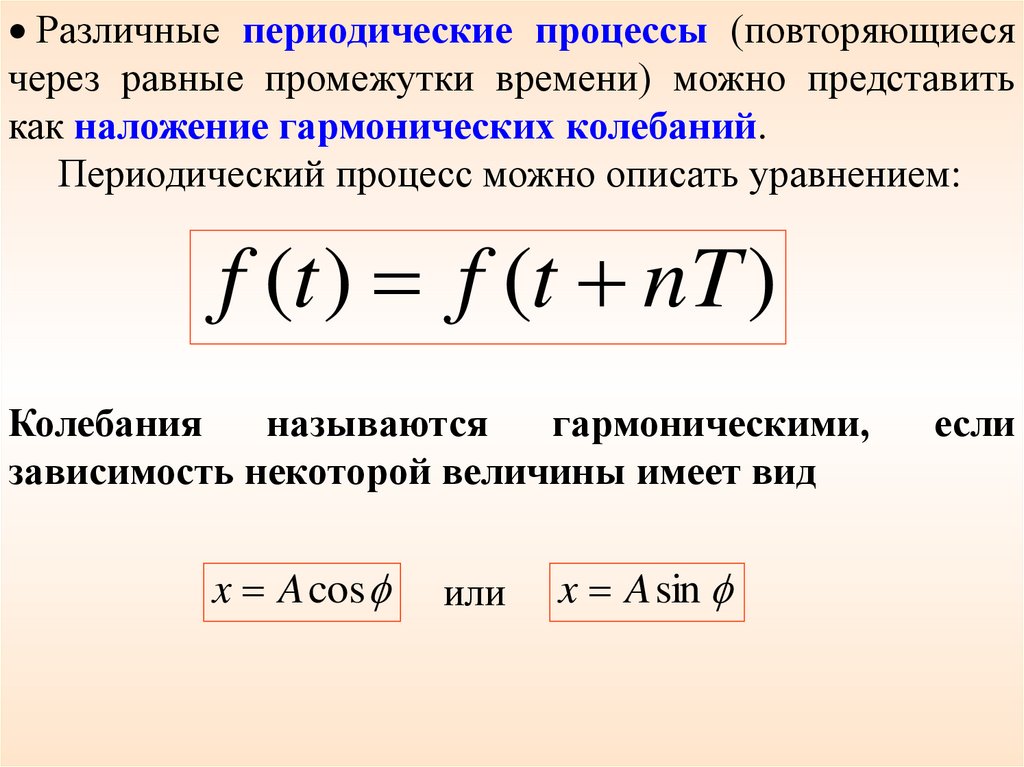
Различные периодические процессы (повторяющиесячерез равные промежутки времени) можно представить
как наложение гармонических колебаний.
Периодический процесс можно описать уравнением:
f (t ) f (t nT )
Колебания
называются
гармоническими,
зависимость некоторой величины имеет вид
x A cos
или
x A sin
если
11.
2. Параметры гармонических колебанийРасстояние груза от положения равновесия до точки, в
которой находится груз, называют смещением x.
Максимальное смещение – наибольшее расстояние от
положения равновесия – называется амплитудой и
обозначается, буквой A.
0t определяет смещение x в данный момент
.времени t и называется фазой колебания.
0
0
называется начальной фазой колебания при t=0
12.
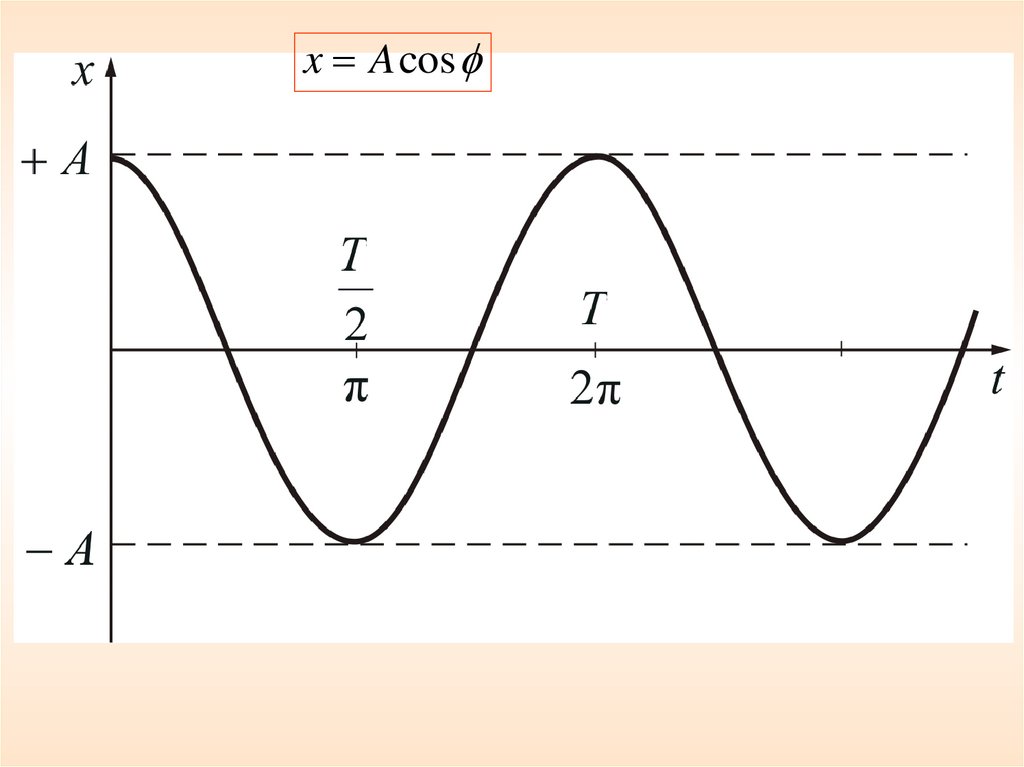
x A cos13.
1314.
1415.
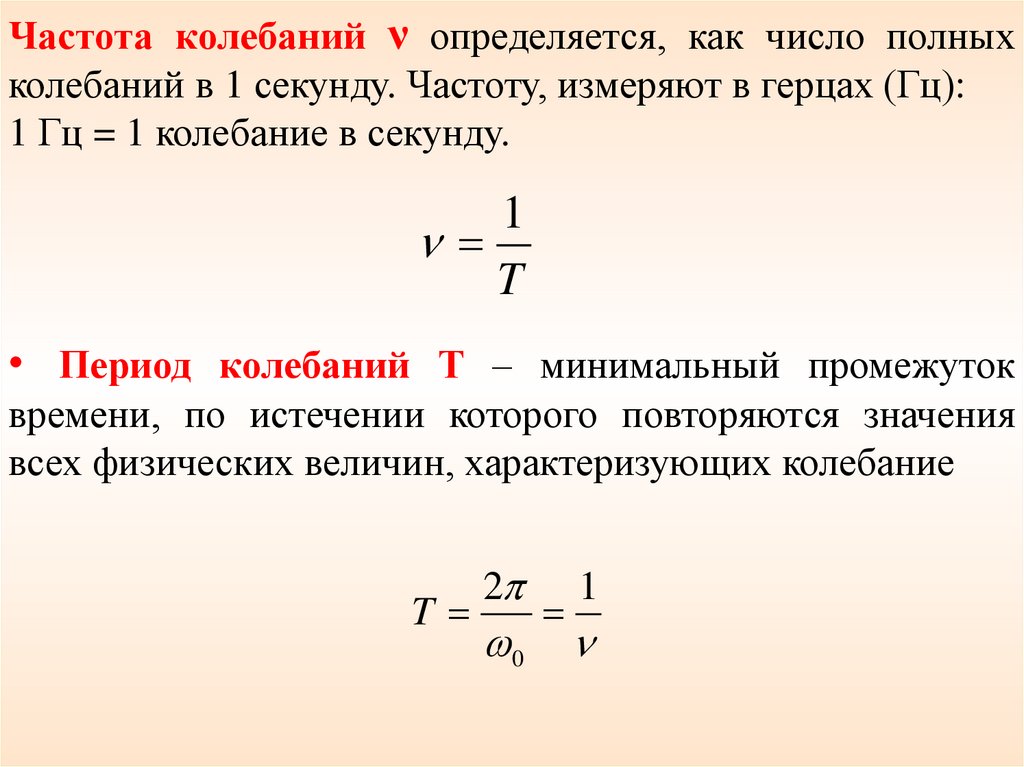
Частота колебаний ν определяется, как число полныхколебаний в 1 секунду. Частоту, измеряют в герцах (Гц):
1 Гц = 1 колебание в секунду.
1
T
• Период колебаний Т – минимальный промежуток
времени, по истечении которого повторяются значения
всех физических величин, характеризующих колебание
T
2
0
1
16.
• ω – циклическая (круговая) частота – числополных колебаний за 2π секунд.
0 2
• Фаза φ не влияет на форму кривой х(t), а влияет
лишь на ее положение в некоторый произвольный
момент времени t.
• Гармонические колебания являются всегда
синусоидальными.
• Частота и период гармонических колебаний не
зависят от амплитуды.
17.
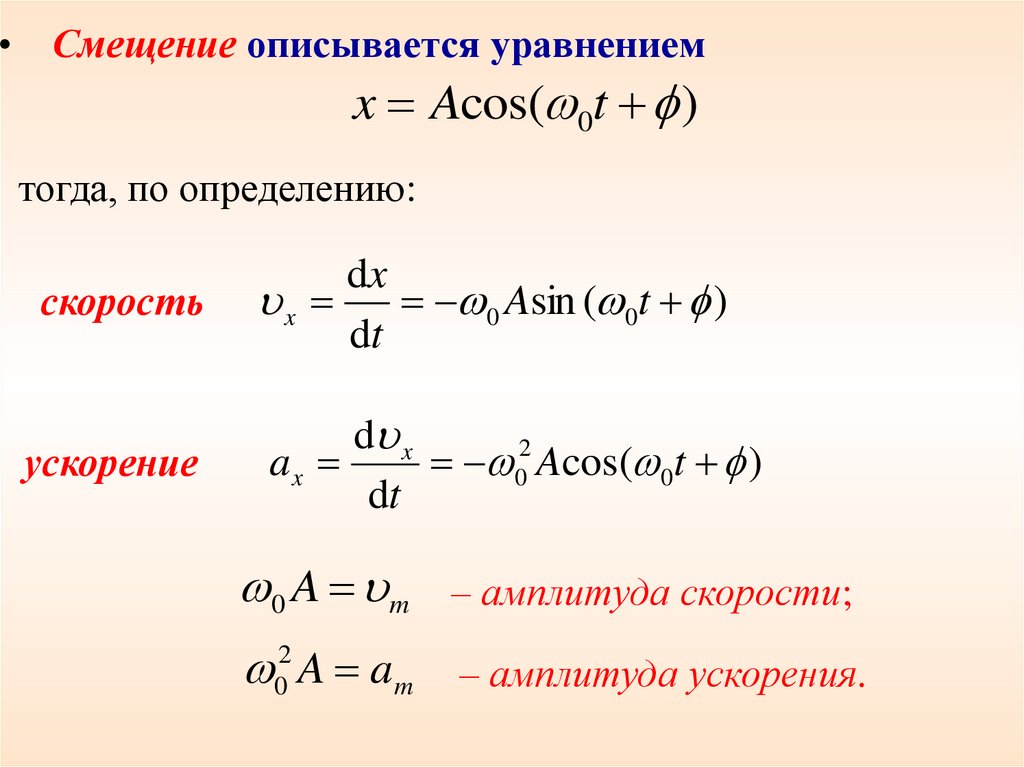
• Смещение описывается уравнениемx Acos( 0t )
тогда, по определению:
скорость
ускорение
dx
x 0 Asin ( 0t )
dt
d x
ax
02 Acos( 0t )
dt
0 A m – амплитуда скорости;
02 A am – амплитуда ускорения.
18.
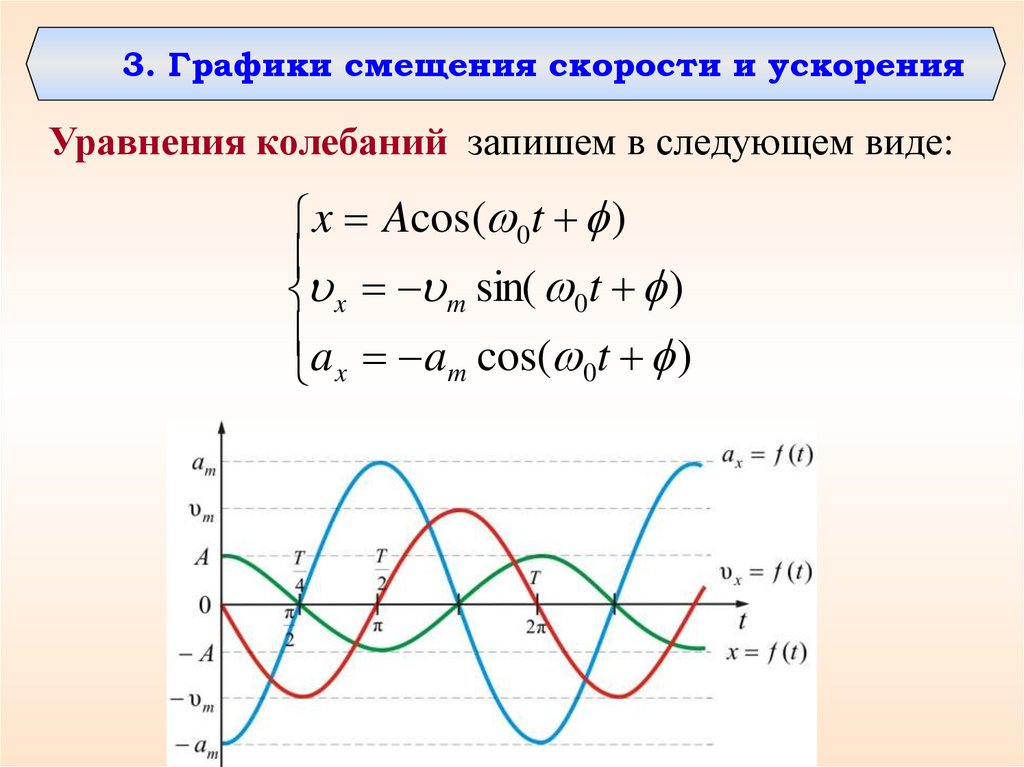
3. Графики смещения скорости и ускоренияУравнения колебаний запишем в следующем виде:
x Acos( 0t )
x m sin( 0t )
a a cos( t )
m
0
x
19.
Скорость колебаний тела максимальна и равнаамплитуде скорости в момент прохождения через
положение равновесия (x=0).
При максимальном смещении ( x A ) скорость
равна нулю.
Ускорение равно нулю при прохождении телом
положения равновесия и достигает наибольшего
значения, равного амплитуде ускорения при
наибольших смещениях.
20.
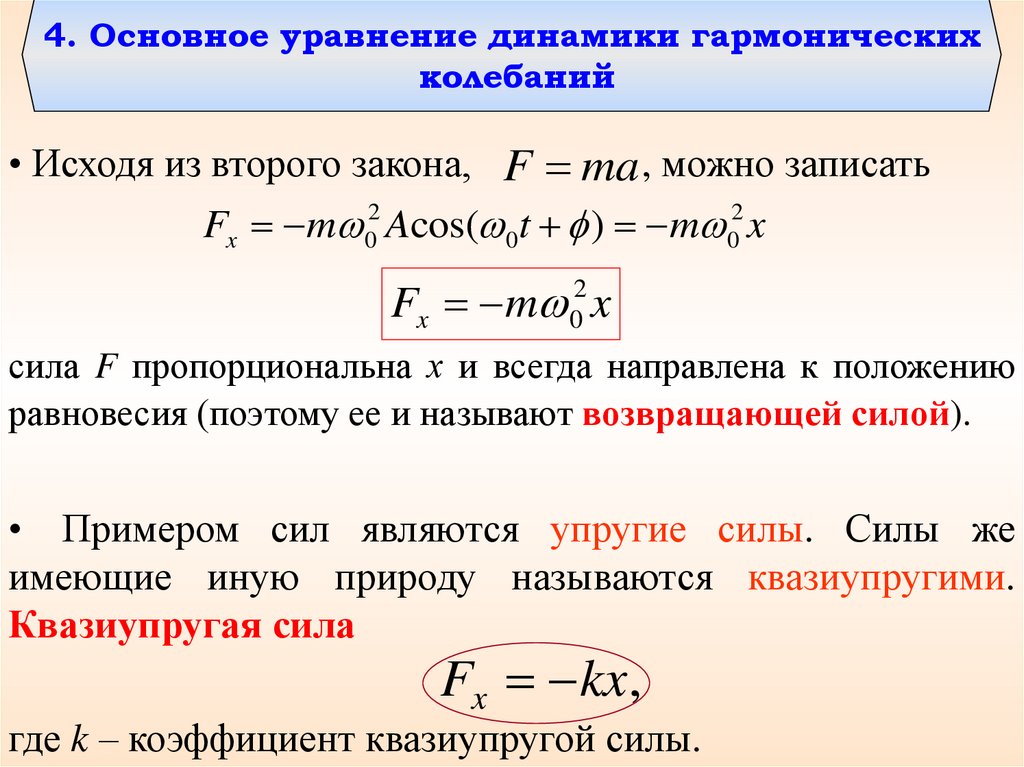
4. Основное уравнение динамики гармоническихколебаний
• Исходя из второго закона, F ma , можно записать
Fx m 02 Acos( 0t ) m 02 x
Fx m 02 x
сила F пропорциональна х и всегда направлена к положению
равновесия (поэтому ее и называют возвращающей силой).
• Примером сил являются упругие силы. Силы же
имеющие иную природу называются квазиупругими.
Квазиупругая сила
Fx kx,
где k – коэффициент квазиупругой силы.
21.
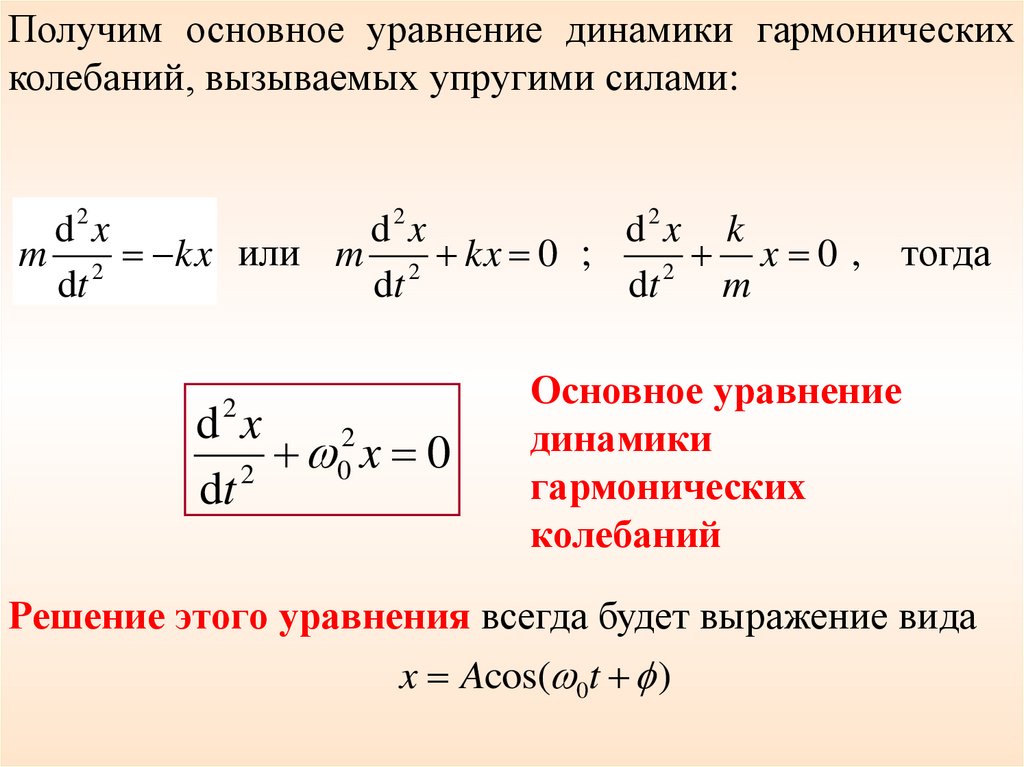
Получим основное уравнение динамики гармоническихколебаний, вызываемых упругими силами:
d2 x
d2 x
d2 x k
m 2 kx или m 2 kx 0 ;
x 0 ,
2
dt
dt
dt
m
2
d x
2
0 x 0
2
dt
тогда
Основное уравнение
динамики
гармонических
колебаний
Решение этого уравнения всегда будет выражение вида
x Acos( 0t )
22.
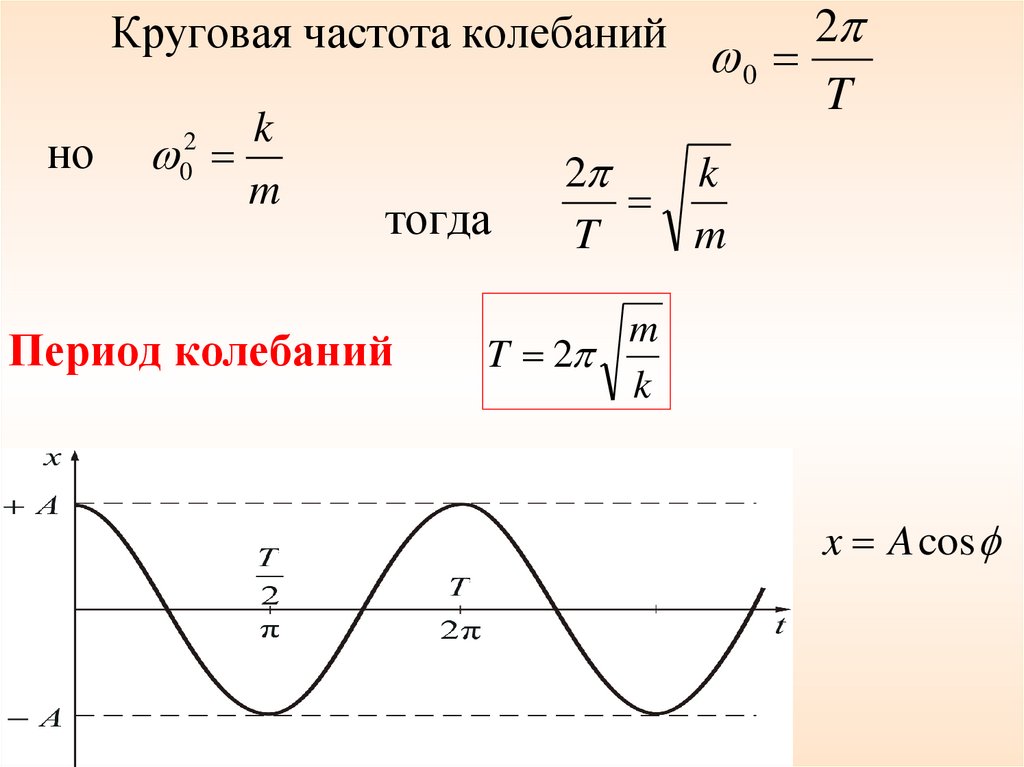
Круговая частота колебанийно
k
m
2
0
тогда
Период колебаний
2
0
T
2
k
T
m
m
T 2
k
x A cos
23.
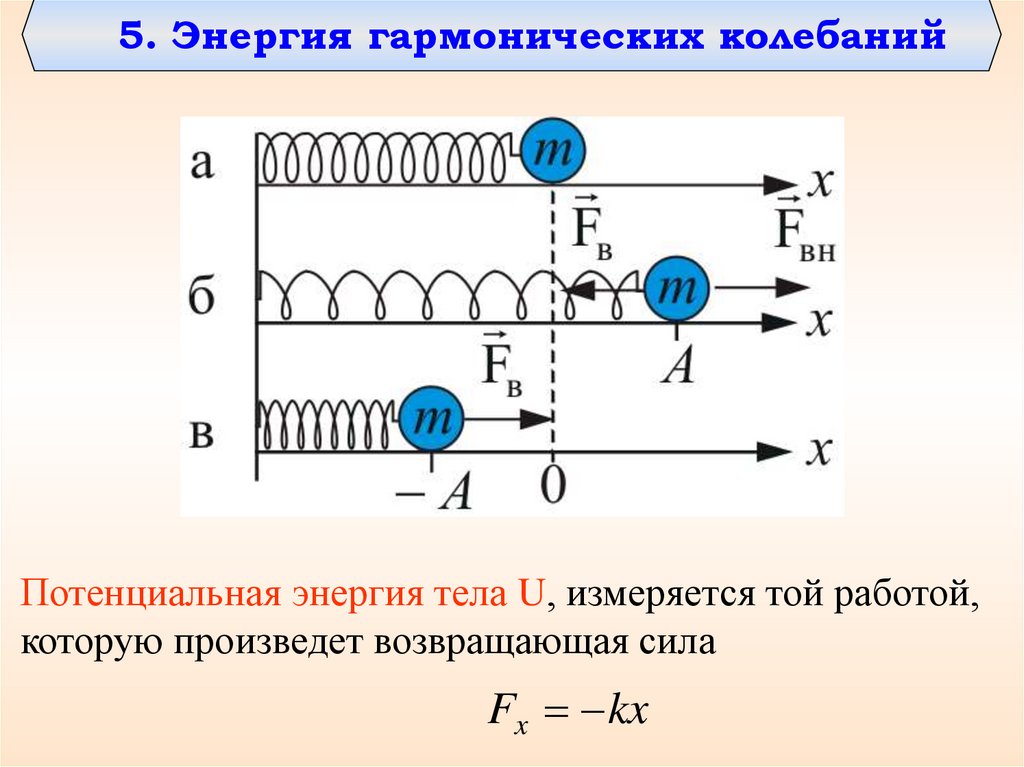
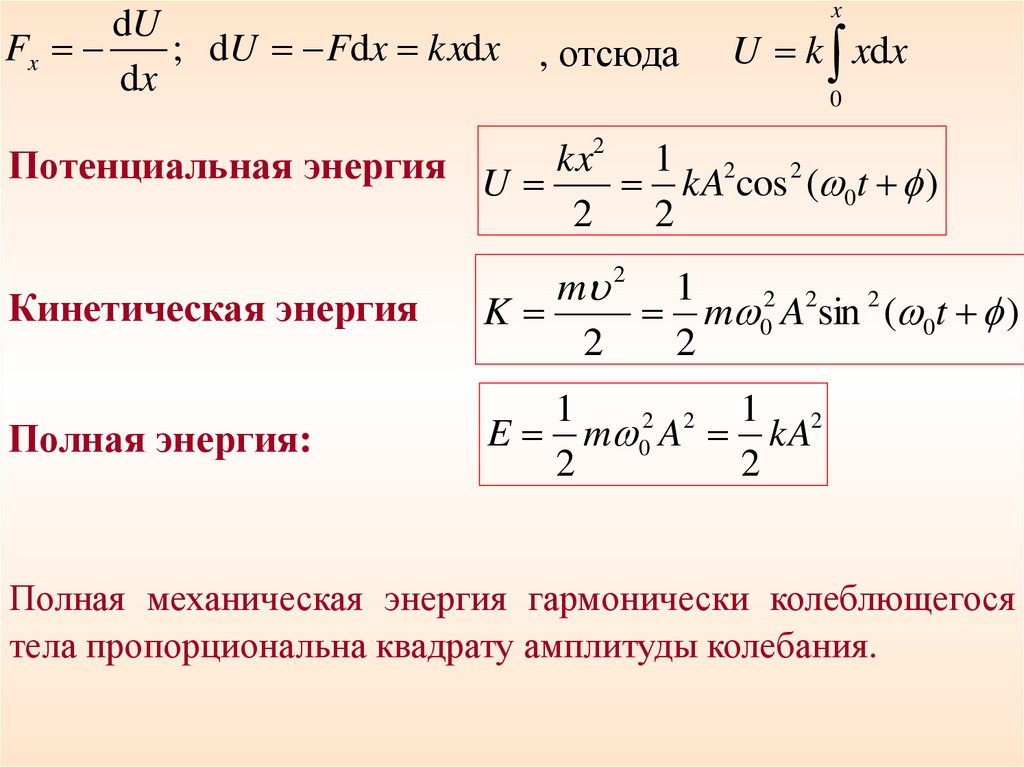
5. Энергия гармонических колебанийПотенциальная энергия тела U, измеряется той работой,
которую произведет возвращающая сила
Fx kx
24.
dUFx
; dU Fdx kxdx , отсюда
dx
x
U k xdx
0
2
kx
1 2 2
Потенциальная энергия U
kA cos ( 0t )
2
2
Кинетическая энергия
m 2 1
K
m 02 A2sin 2 ( 0t )
2
2
Полная энергия:
1
1 2
2 2
E m 0 A kA
2
2
Полная механическая энергия гармонически колеблющегося
тела пропорциональна квадрату амплитуды колебания.
25.
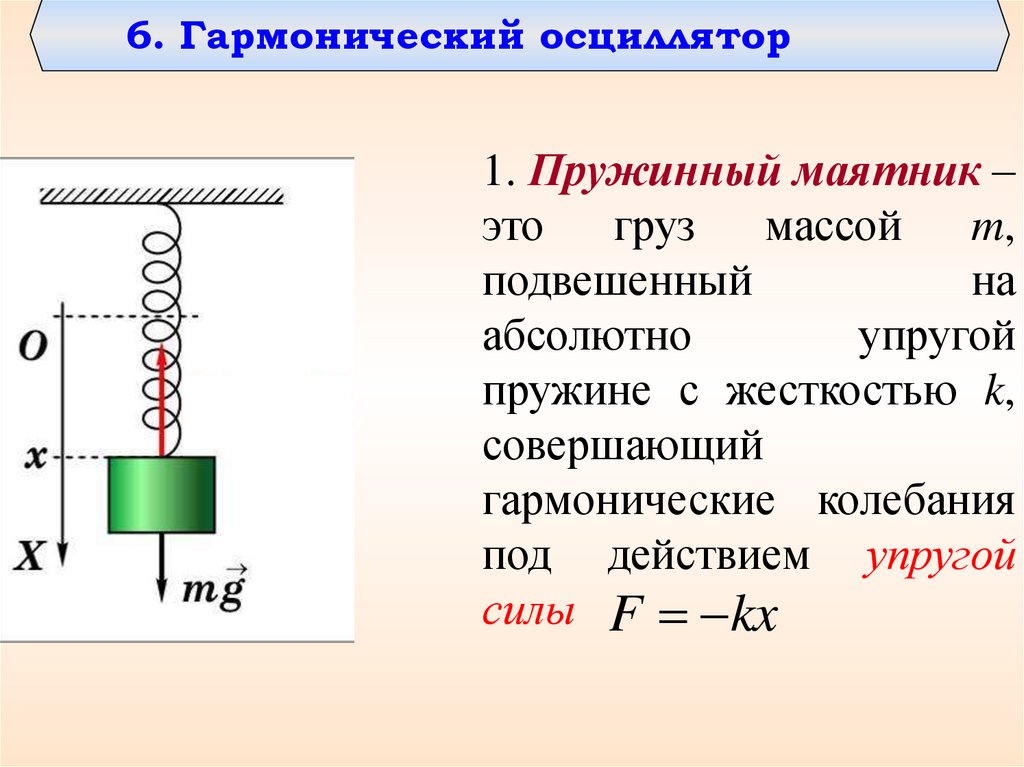
6. Гармонический осциллятор1. Пружинный маятник –
это
груз
массой
m,
подвешенный
на
абсолютно
упругой
пружине с жесткостью k,
совершающий
гармонические колебания
под действием упругой
силы F kx
26.
Из второго закона Ньютона F = mа; или F = - kxполучим уравнение движения маятника:
d 2x
m 2 kx
dt
или
d 2x k
x 0
2
dt
m
Решение этого уравнения – гармонические колебания вида:
x A cos( 0t )
циклическая частота ω
k
0
;
m
период Т
m
T 2
k
27.
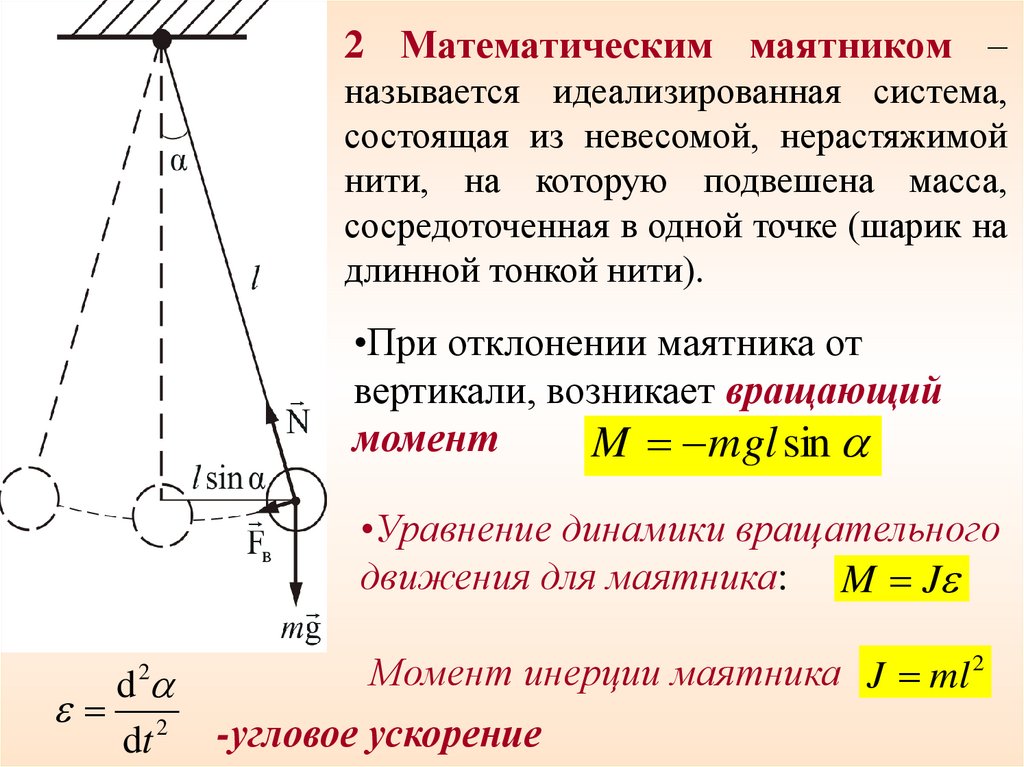
2 Математическим маятником –называется идеализированная система,
состоящая из невесомой, нерастяжимой
нити, на которую подвешена масса,
сосредоточенная в одной точке (шарик на
длинной тонкой нити).
•При отклонении маятника от
вертикали, возникает вращающий
момент
M mgl sin
•Уравнение динамики вращательного
движения для маятника: M J
d
2
dt
2
Момент инерции маятника J ml 2
-угловое ускорение
28.
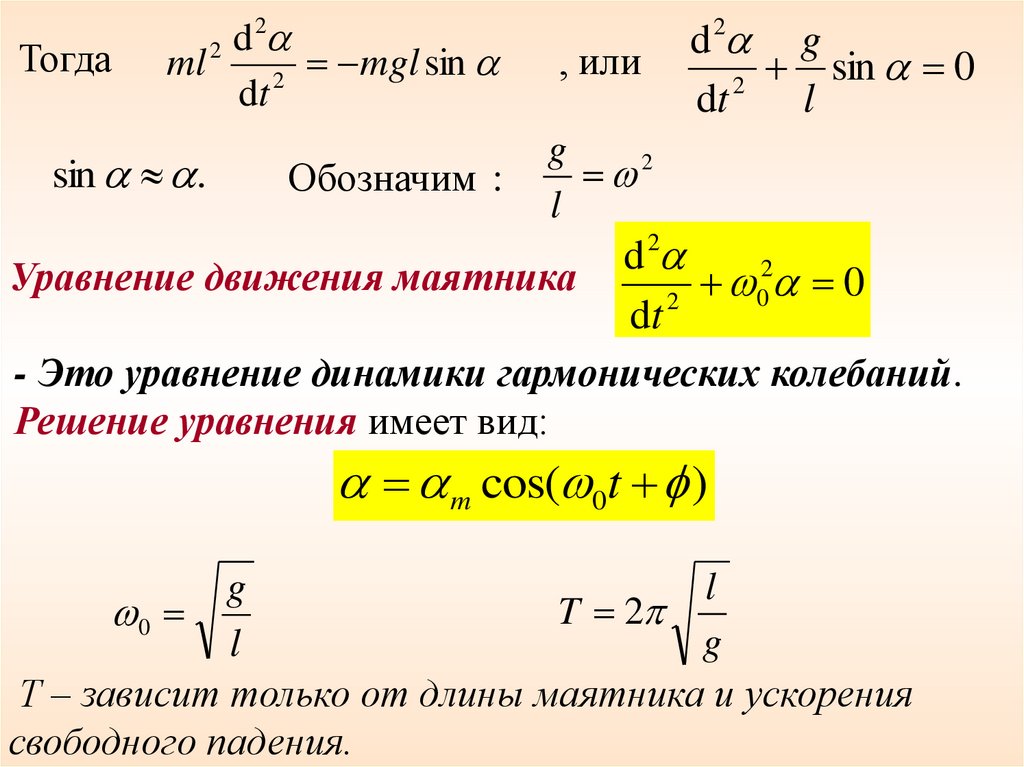
Тогда2
d
2
ml
mgl sin
2
dt
sin .
Обозначим :
, или
d 2 g
sin 0
2
dt
l
g
2
l
2
d
2
Уравнение движения маятника
0 0
2
dt
- Это уравнение динамики гармонических колебаний.
Решение уравнения имеет вид:
m cos( 0t )
l
g
T 2
0
g
l
Т – зависит только от длины маятника и ускорения
свободного падения.
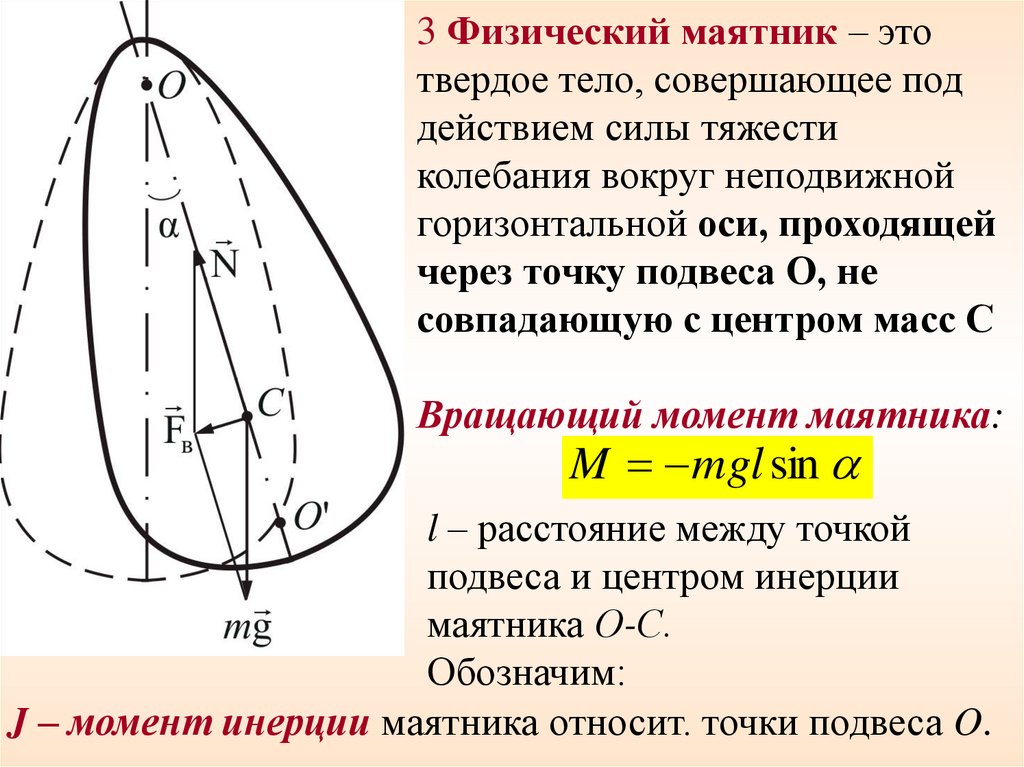
29.
3 Физический маятник – этотвердое тело, совершающее под
действием силы тяжести
колебания вокруг неподвижной
горизонтальной оси, проходящей
через точку подвеса О, не
совпадающую с центром масс С
Вращающий момент маятника:
M mgl sin
l – расстояние между точкой
подвеса и центром инерции
маятника О-С.
Обозначим:
J – момент инерции маятника относит. точки подвеса O.
30.
d 2 - угловое ускорение, тогда2
dt
sin
d 2
J 2 mgl sin
dt
Уравнение динамики вращательного движения
d 2
2
0 0
2
dt
mgl
J
2
0
J
T 2
mgl
m cos( 0t )
lïð.
J
ml
T 2
lïð.
g
lпр. – приведенная длина физического маятника – это длина такого
математического маятника, период колебания которого совпадает с
периодом колебаний данного физического маятника.
31.
7. Способы представления гармонических колебанийГармонические колебания можно представить несколькими способами:
аналитический:
x A cos( 0t )
графический;
геометрический, с помощью вектора амплитуды
(метод векторных диаграмм).
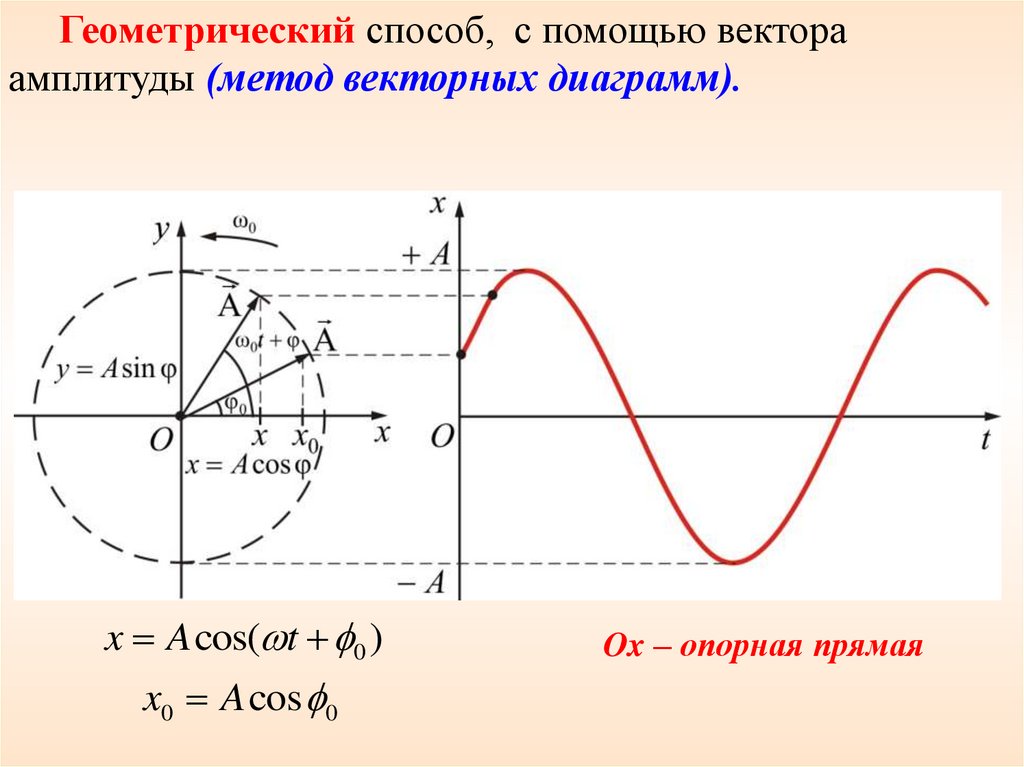
32.
Геометрический способ, с помощью вектораамплитуды (метод векторных диаграмм).
x A cos( t 0 )
x0 A cos 0
Ox – опорная прямая
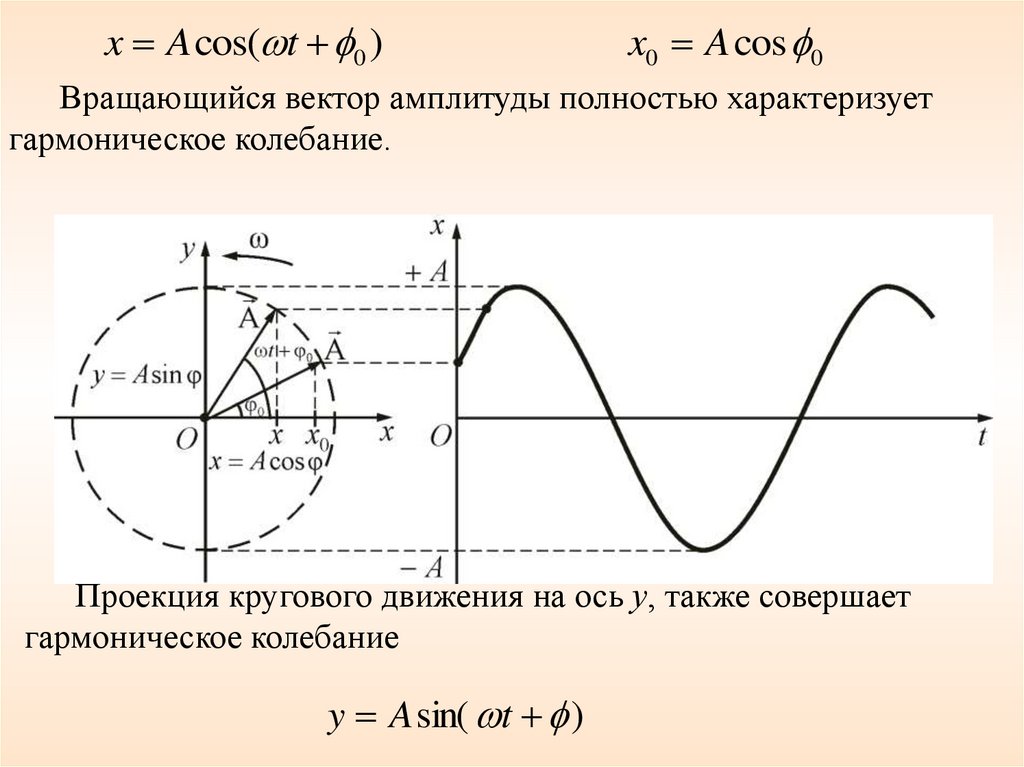
33.
x A cos( t 0 )x0 A cos 0
Вращающийся вектор амплитуды полностью характеризует
гармоническое колебание.
Проекция кругового движения на ось у, также совершает
гармоническое колебание
y A sin( t )
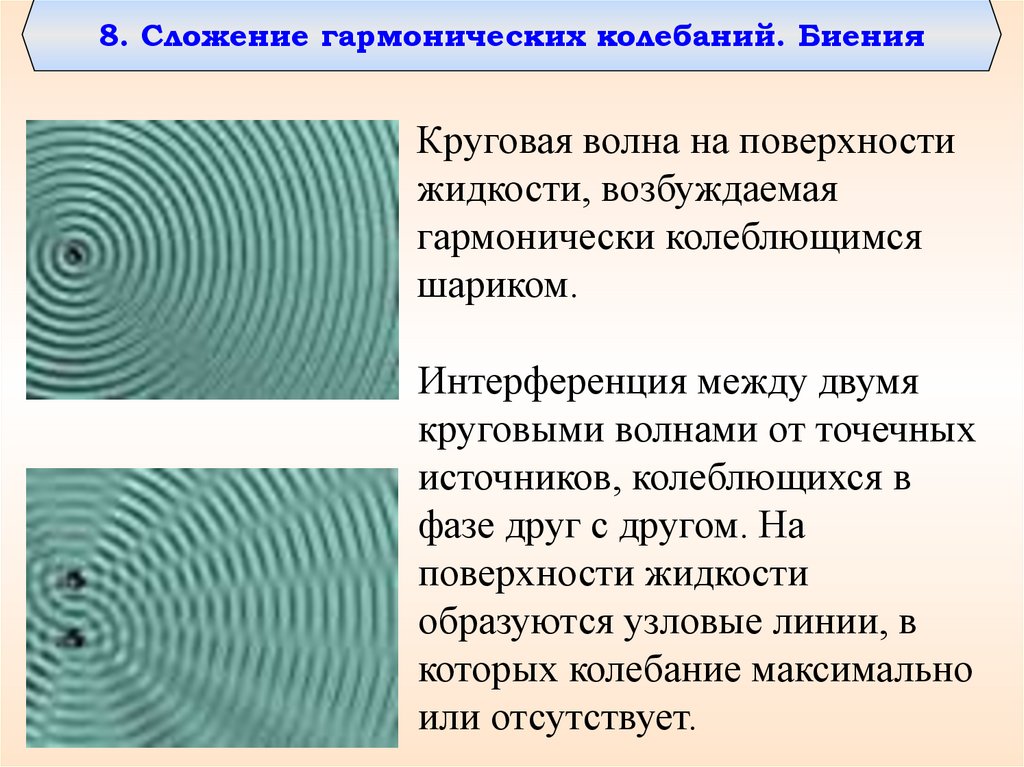
34.
8. Сложение гармонических колебаний. БиенияКруговая волна на поверхности
жидкости, возбуждаемая
гармонически колеблющимся
шариком.
Интерференция между двумя
круговыми волнами от точечных
источников, колеблющихся в
фазе друг с другом. На
поверхности жидкости
образуются узловые линии, в
которых колебание максимально
или отсутствует.
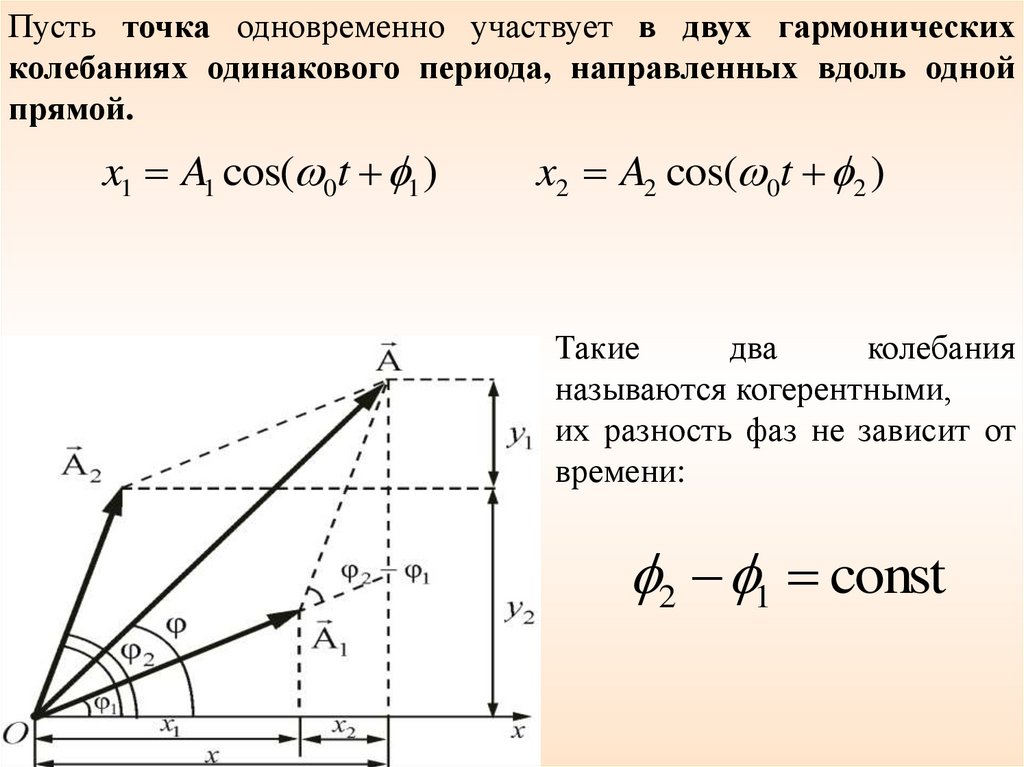
35.
Пусть точка одновременно участвует в двух гармоническихколебаниях одинакового периода, направленных вдоль одной
прямой.
x1 A1 cos( 0t 1 )
x2 A2 cos( 0t 2 )
Такие
два
колебания
называются когерентными,
их разность фаз не зависит от
времени:
2 1 const
36.
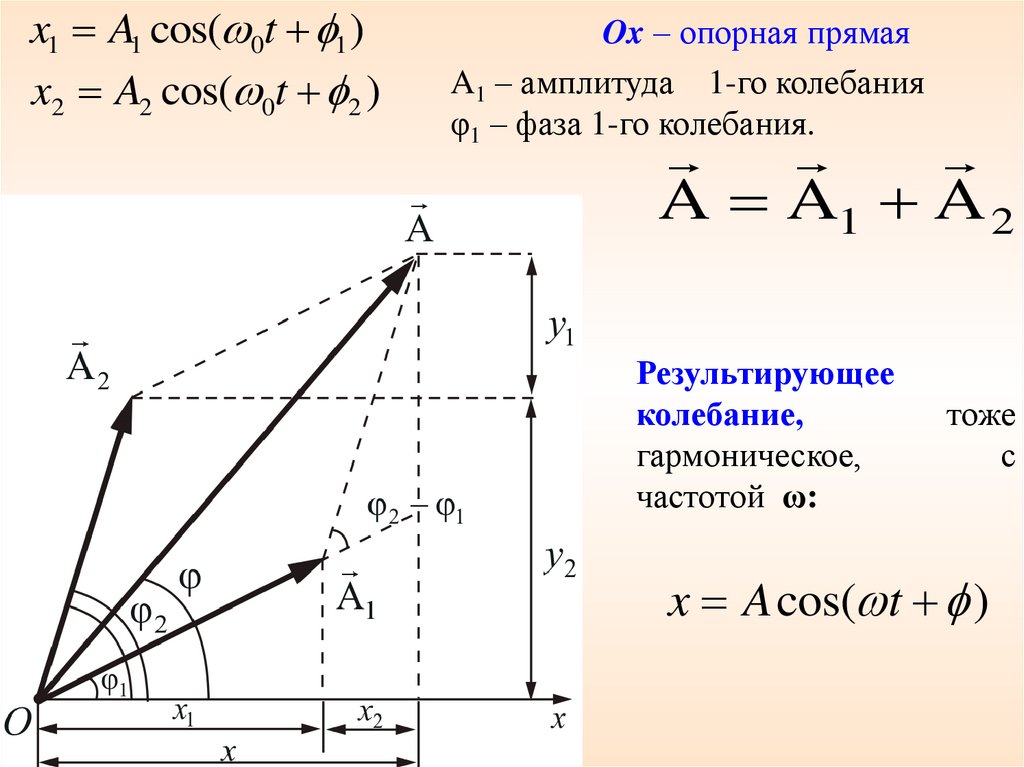
x1 A1 cos( 0t 1 )x2 A2 cos( 0t 2 )
Ox – опорная прямая
A1 – амплитуда 1-го колебания
φ1 – фаза 1-го колебания.
A A1 A 2
Результирующее
колебание,
гармоническое,
частотой ω:
тоже
с
x A cos( t )
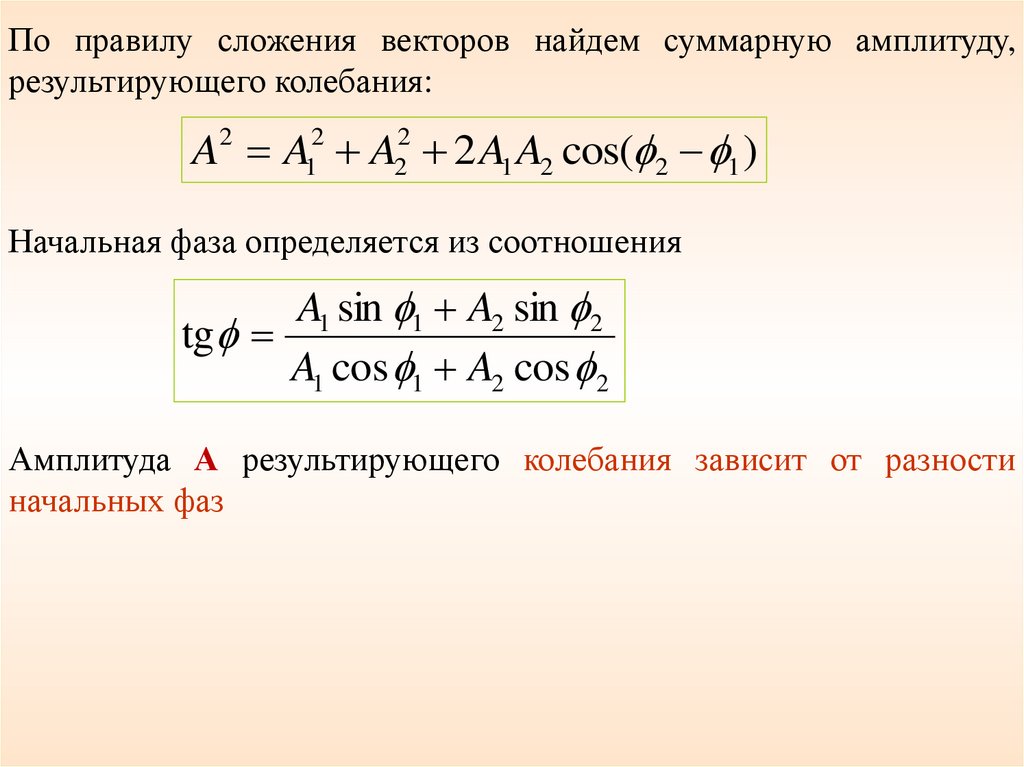
37.
По правилу сложения векторов найдем суммарную амплитуду,результирующего колебания:
A A A 2 A1 A2 cos( 2 1 )
2
2
1
2
2
Начальная фаза определяется из соотношения
A1 sin 1 A2 sin 2
tg
A1 cos 1 A2 cos 2
Амплитуда А результирующего колебания зависит от разности
начальных фаз
38.
1. Разность фаз равна нулю или четному числу π, то есть2 1 2 n
Тогда
cos( 2 1 ) 1
колебания синфазны
n 0, 1, 2, 3, ...
и
A A1 A2
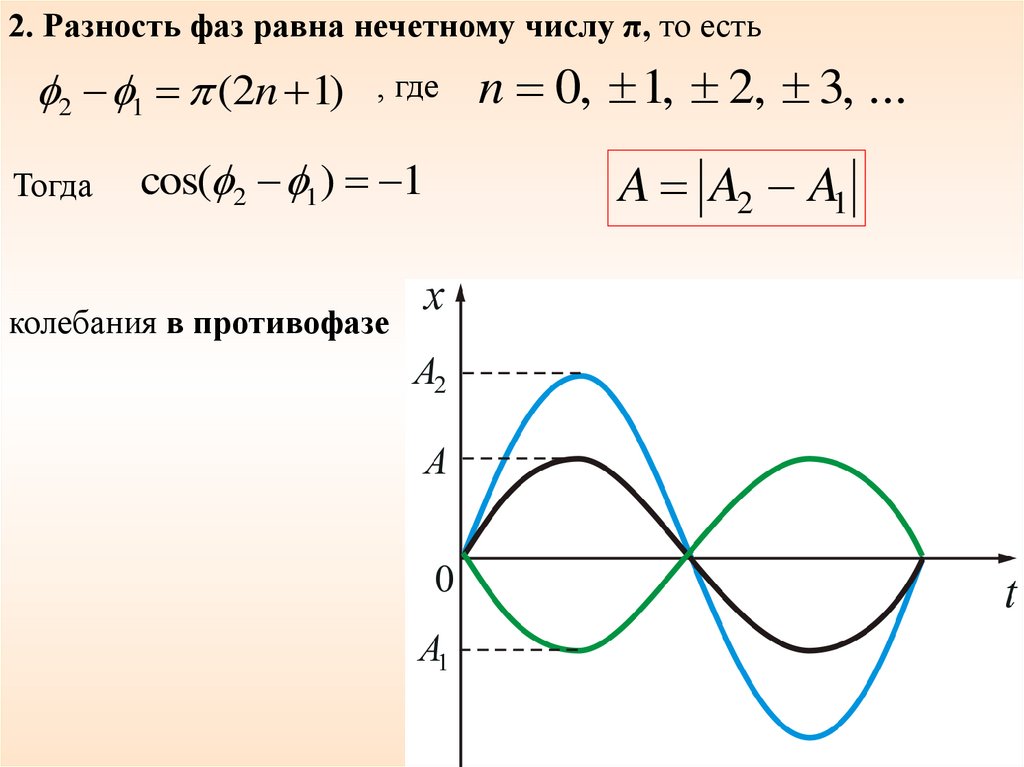
39.
2. Разность фаз равна нечетному числу π, то есть2 1 (2n 1)
Тогда
, где
cos( 2 1 ) 1
колебания в противофазе
n 0, 1, 2, 3, ...
A A2 A1
40.
3. Разность фаз изменяется во времени произвольным образомx1 A1 cos[ 1t 1 (t )]
x2 A2 cos 2t 2 (t )
Это некогерентные колебания
Здесь интересен случай, называемый биениями, когда частоты
близки
1 2
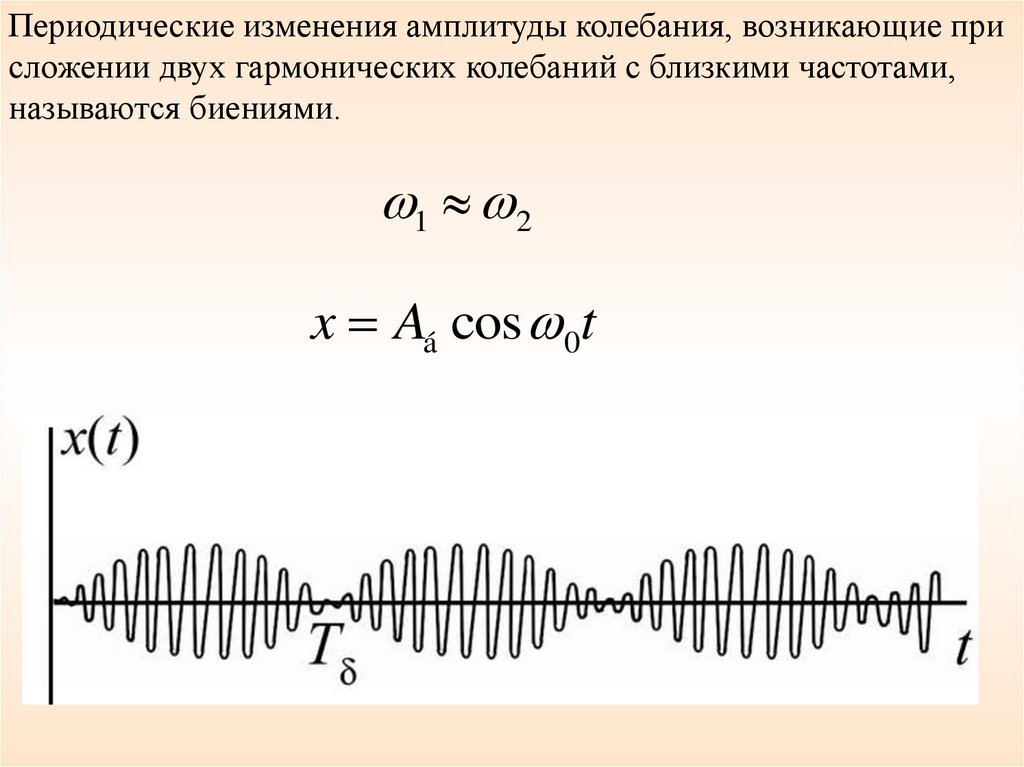
41.
Периодические изменения амплитуды колебания, возникающие присложении двух гармонических колебаний с близкими частотами,
называются биениями.
1 2
x Aá cos 0t
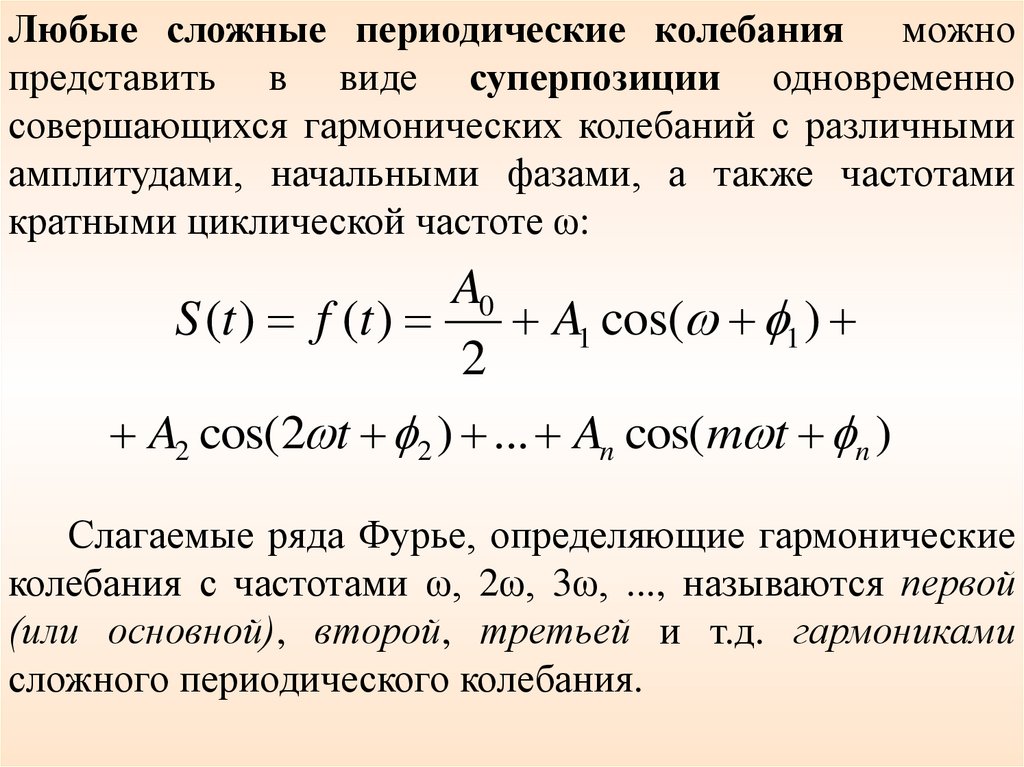
42.
Любые сложные периодические колебания можнопредставить в виде суперпозиции одновременно
совершающихся гармонических колебаний с различными
амплитудами, начальными фазами, а также частотами
кратными циклической частоте ω:
A0
S (t ) f (t )
A1 cos( 1 )
2
A2 cos(2 t 2 ) ... An cos(m t n )
Слагаемые ряда Фурье, определяющие гармонические
колебания с частотами ω, 2ω, 3ω, ..., называются первой
(или основной), второй, третьей и т.д. гармониками
сложного периодического колебания.
43.
9. Сложение взаимно перпендикулярных колебанийx A1 cos( 0t 1 )
1 2
y A2 cos( 0 t 2 )
2 1
y 2 x 2 2 xy
2
2
cos( 2 1 ) sin ( 2 1 )
2
A2 A1 A1 A2
В результате получили уравнение
эллипса с произвольно
расположенными осями
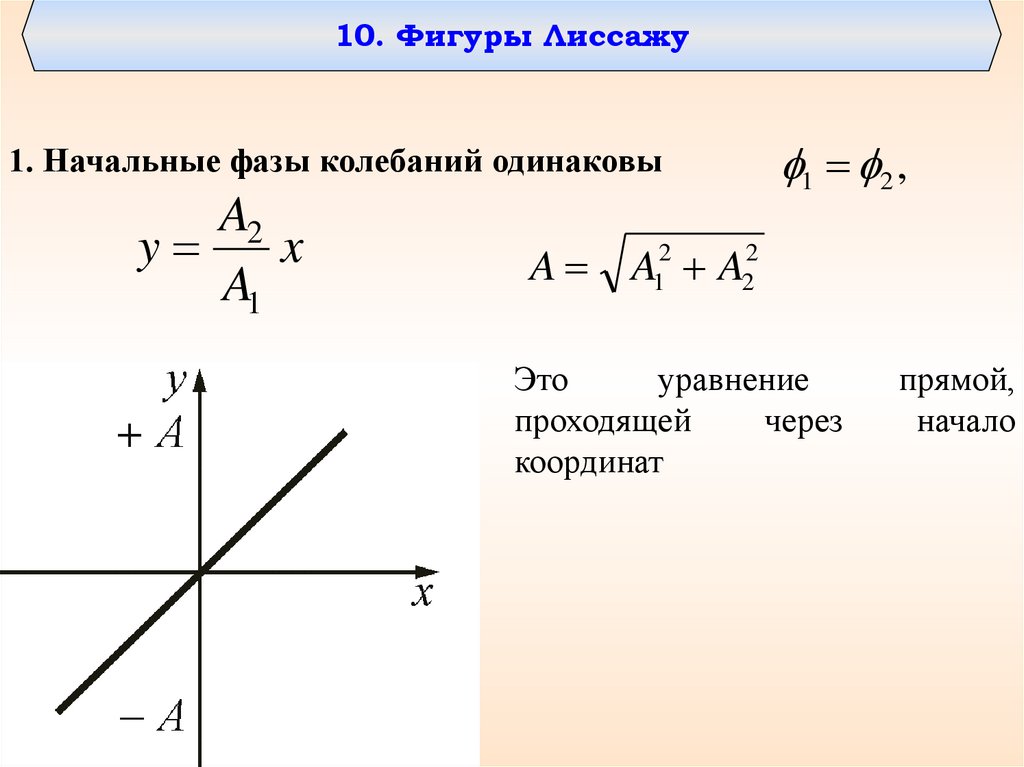
44.
10. Фигуры Лиссажу1 2 ,
1. Начальные фазы колебаний одинаковы
A2
y
x
A1
A A A
2
1
2
2
Это
уравнение
проходящей
через
координат
прямой,
начало
45.
cos 12. Начальная разность фаз равна π.
A2
y
x
A1
A
2
A1
2
A2
46.
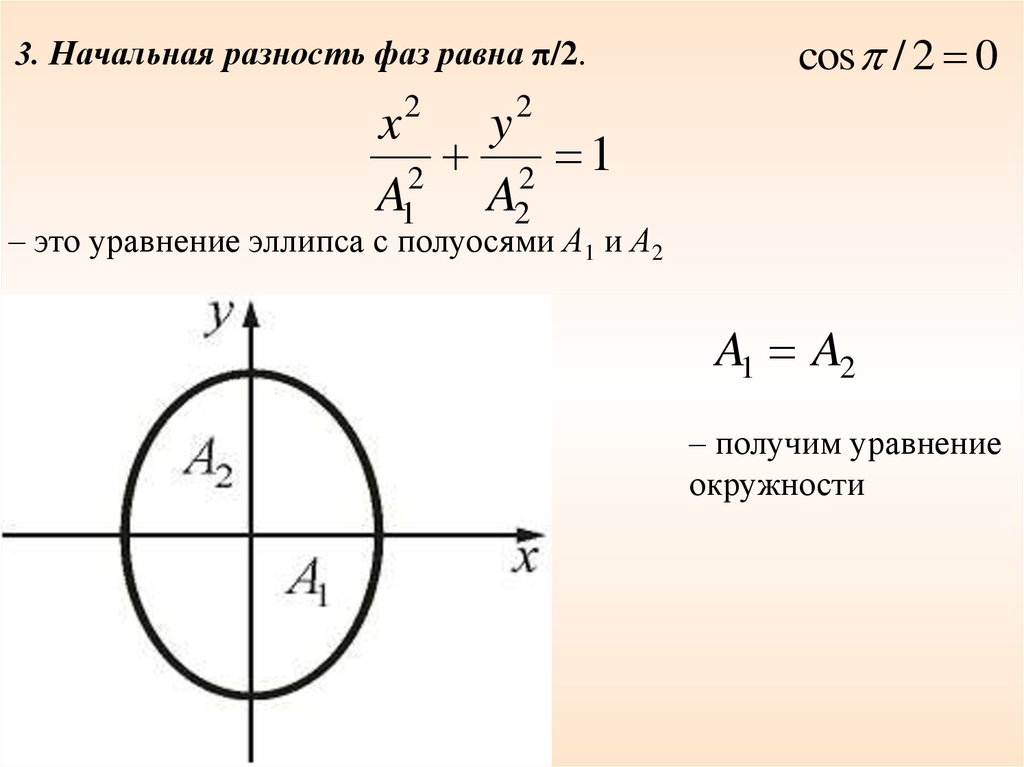
3. Начальная разность фаз равна π/2.2
cos / 2 0
2
x
y
2 1
2
A1 A2
– это уравнение эллипса с полуосями А1 и А2
A1 A2
– получим уравнение
окружности
47.
4. Все остальные разности фаз дают эллипсы с различнымуглом наклона относительно осей координат.
Фигуры,
получаемые
при
сложении
взаимно
перпендикулярных колебаний разных частот, называются
фигурами Лиссажу.
48.
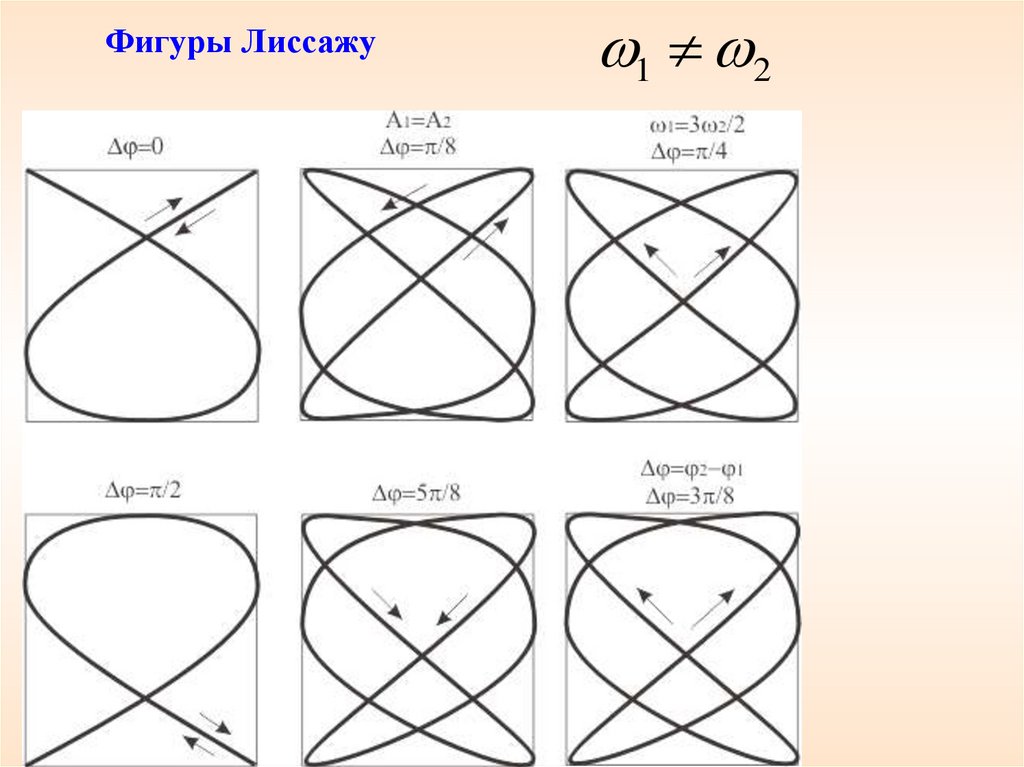
Фигуры Лиссажу1 2
49.
11. Свободные затухающие механические колебанияВсе реальные колебания являются затухающими.
Энергия механических колебаний постепенно расходуется
на работу против сил трения и амплитуда колебаний
уменьшается.
Сила трения (или сопротивления)
Fòð r
где r – коэффициент сопротивления,
– скорость движения
50.
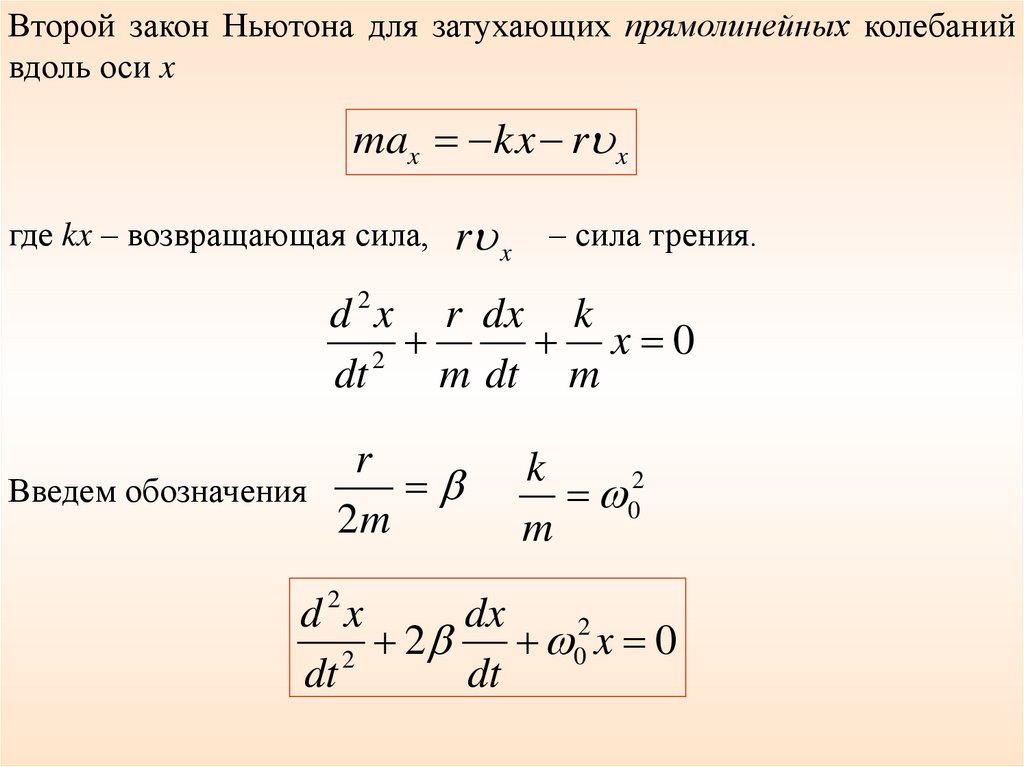
Второй закон Ньютона для затухающих прямолинейных колебанийвдоль оси x
max kx r x
где kx – возвращающая сила,
r x
– сила трения.
d 2 x r dx k
x 0
2
dt
m dt m
r
Введем обозначения
2m
2
k
2
0
m
d x
dx
2
2
0x 0
2
dt
dt
51.
Решение уравнения имеет видx A0 e t cos( t )
( 0 )
Найдем частоту колебаний ω.
2
0
k
0
m
;
r
2m
Условный период
0
2
2
k r
.
m 2m
;
T
2
2
2
0
2
,
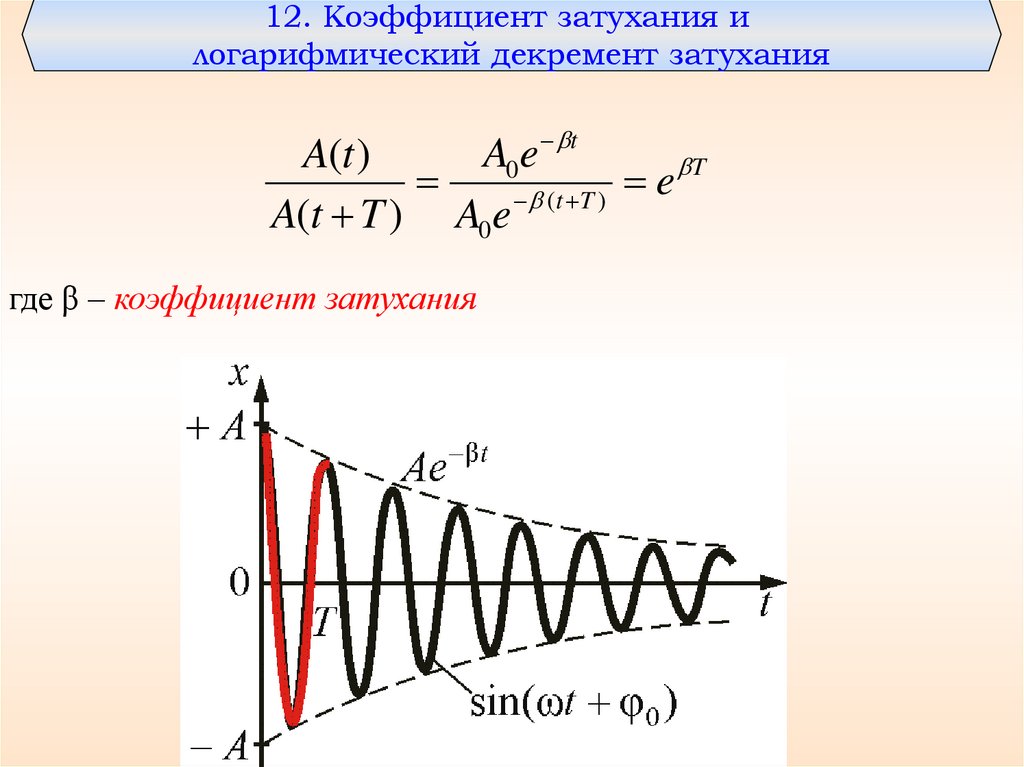
52.
12. Коэффициент затухания илогарифмический декремент затухания
A0e t
A(t )
T
e
( t T )
A(t T ) A0e
где β – коэффициент затухания
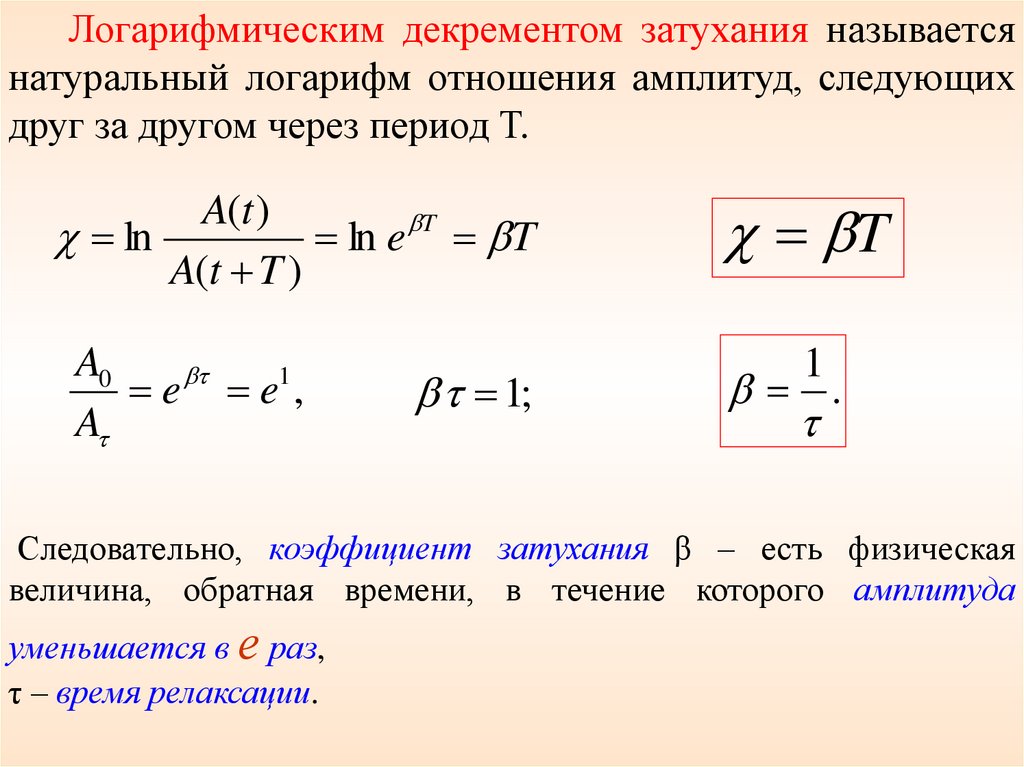
53.
Логарифмическим декрементом затухания называетсянатуральный логарифм отношения амплитуд, следующих
друг за другом через период Т.
A(t )
T
ln
ln e T
A(t T )
A0
e e1 ,
A
1;
T
1
.
Следовательно, коэффициент затухания β – есть физическая
величина, обратная времени, в течение которого амплитуда
уменьшается в е раз,
τ – время релаксации.
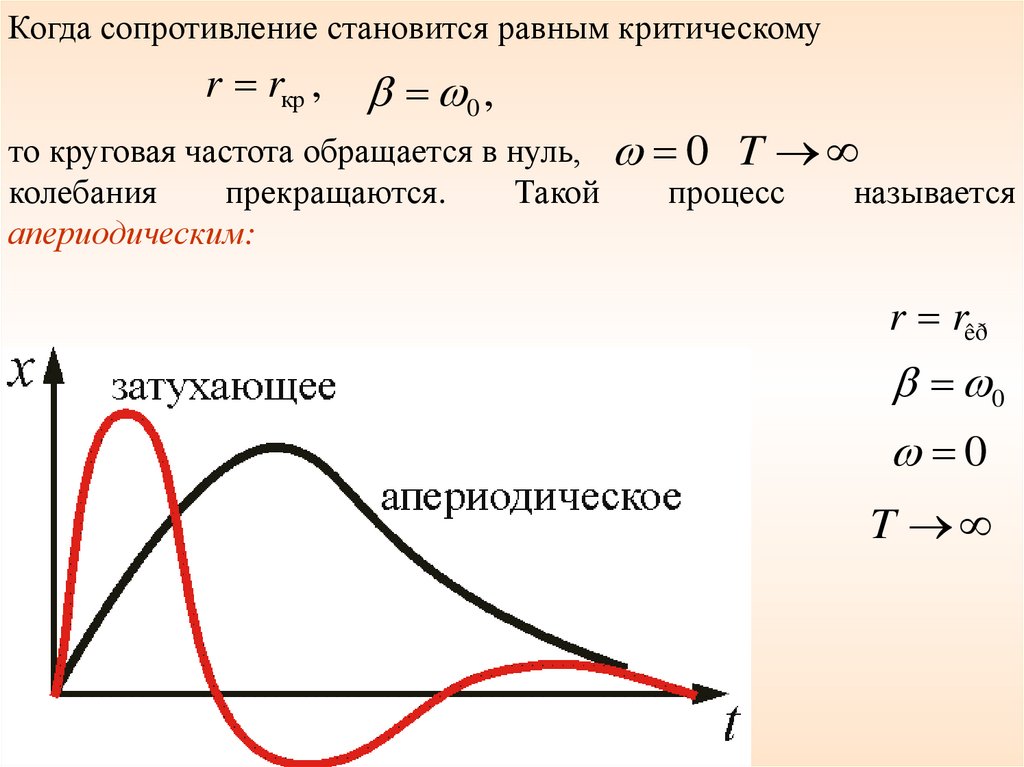
54.
Когда сопротивление становится равным критическомуr rкр ,
0 ,
то круговая частота обращается в нуль,
колебания
прекращаются.
Такой
апериодическим:
0 T
процесс
называется
r rêð
0
0
T
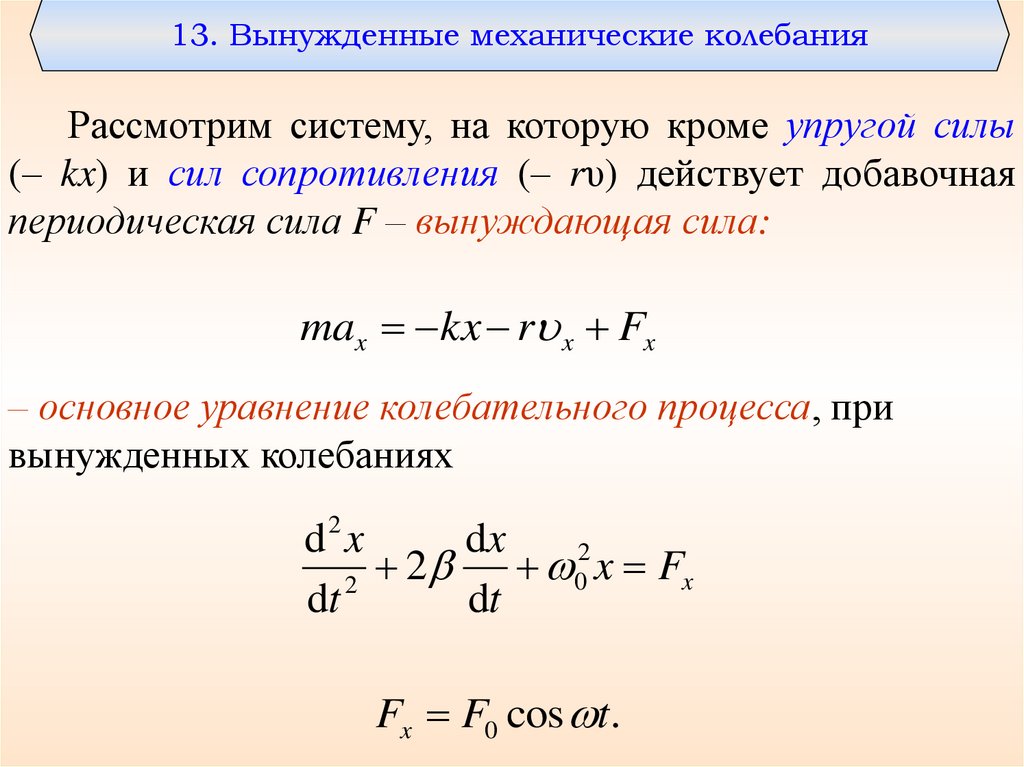
55.
13. Вынужденные механические колебанияРассмотрим систему, на которую кроме упругой силы
(– kx) и сил сопротивления (– rυ) действует добавочная
периодическая сила F – вынуждающая сила:
max kx r x Fx
– основное уравнение колебательного процесса, при
вынужденных колебаниях
d2 x
dx
2
2
0 x Fx
2
dt
dt
Fx F0 cos t.
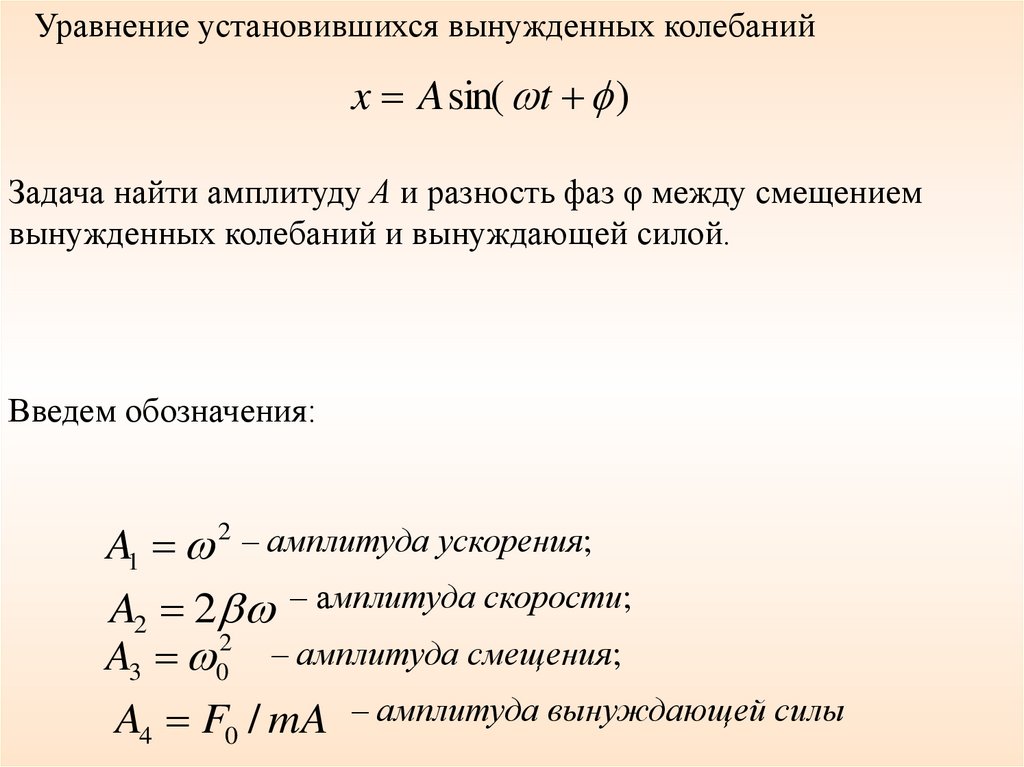
56.
Уравнение установившихся вынужденных колебанийx A sin( t )
Задача найти амплитуду А и разность фаз φ между смещением
вынужденных колебаний и вынуждающей силой.
Введем обозначения:
A1 – амплитуда ускорения;
A2 2 – амплитуда скорости;
A3 02 – амплитуда смещения;
A4 F0 / mA – амплитуда вынуждающей силы
2
57.
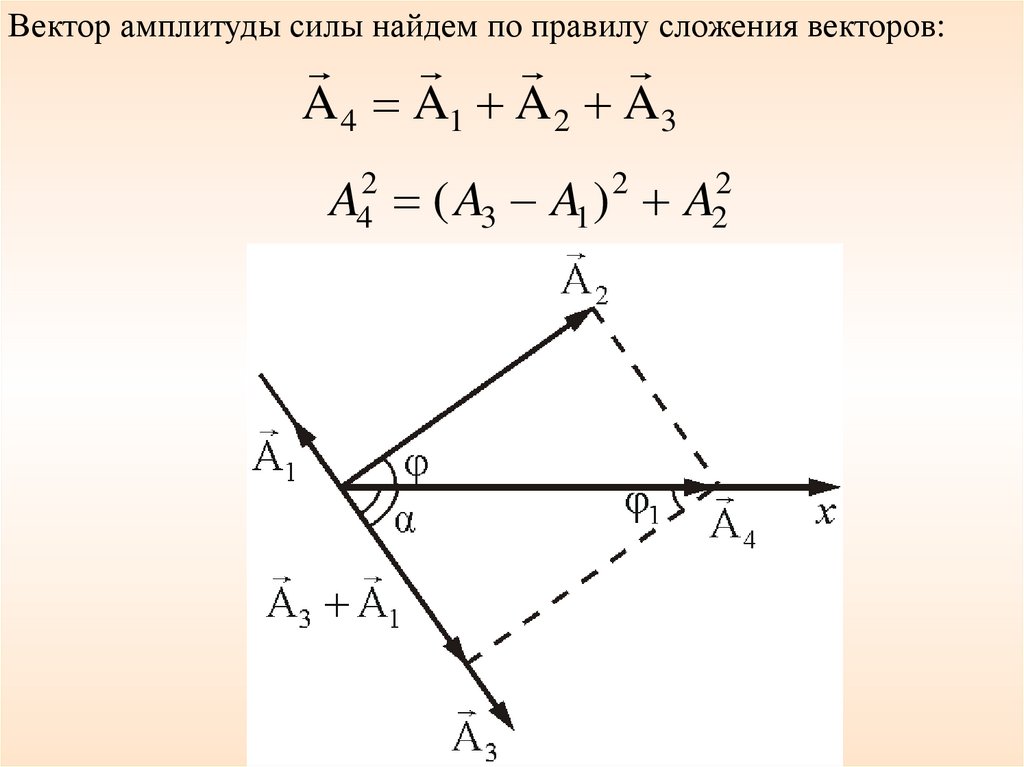
Вектор амплитуды силы найдем по правилу сложения векторов:A 4 A1 A 2 A 3
2
A4
( A3 A1 )
2
2
A2
58.
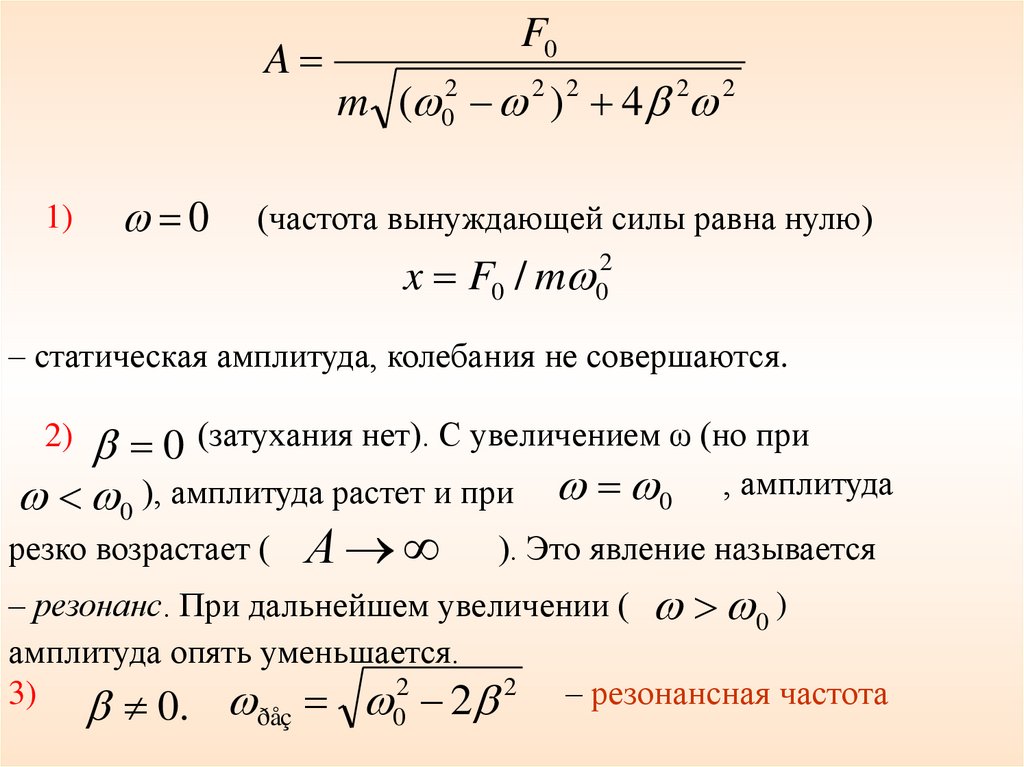
A1)
0
F0
m ( 02 2 ) 2 4 2 2
(частота вынуждающей силы равна нулю)
x F0 / m 02
– статическая амплитуда, колебания не совершаются.
0 (затухания нет). С увеличением ω (но при
0 ), амплитуда растет и при 0 , амплитуда
2)
резко возрастает (
А
). Это явление называется
– резонанс. При дальнейшем увеличении ( 0 )
амплитуда опять уменьшается.
3) 0. 2 2 2 – резонансная частота
ðåç
0
59.
0À
ðåç 02 2 2
- явление резонанса
– резонансная частота
60.
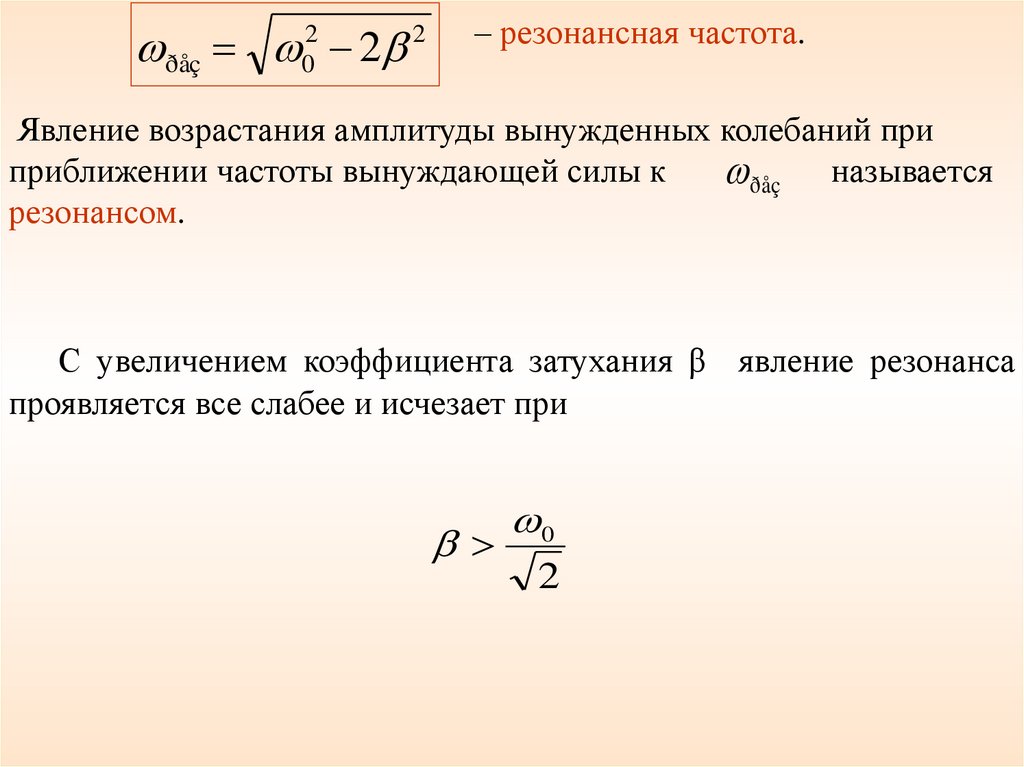
ðåç 22
0
2
– резонансная частота.
Явление возрастания амплитуды вынужденных колебаний при
приближении частоты вынуждающей силы к
ðåç называется
резонансом.
С увеличением коэффициента затухания β явление резонанса
проявляется все слабее и исчезает при
0
2
61.
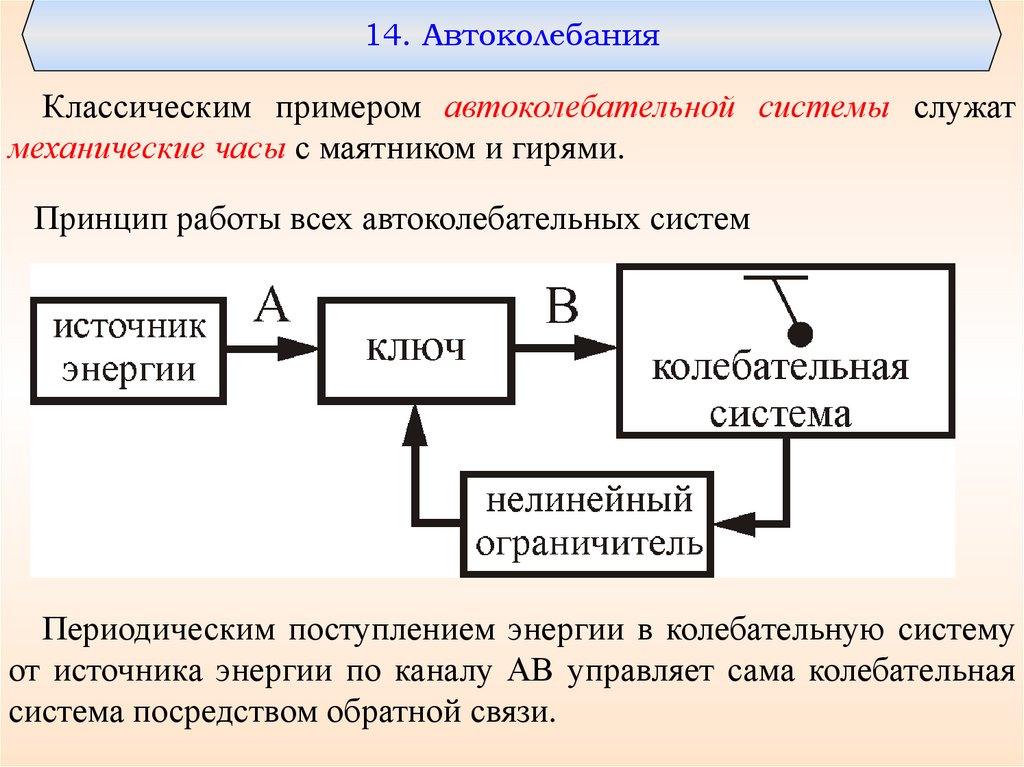
14. АвтоколебанияКлассическим примером автоколебательной системы служат
механические часы с маятником и гирями.
Принцип работы всех автоколебательных систем
Периодическим поступлением энергии в колебательную систему
от источника энергии по каналу АВ управляет сама колебательная
система посредством обратной связи.
62.
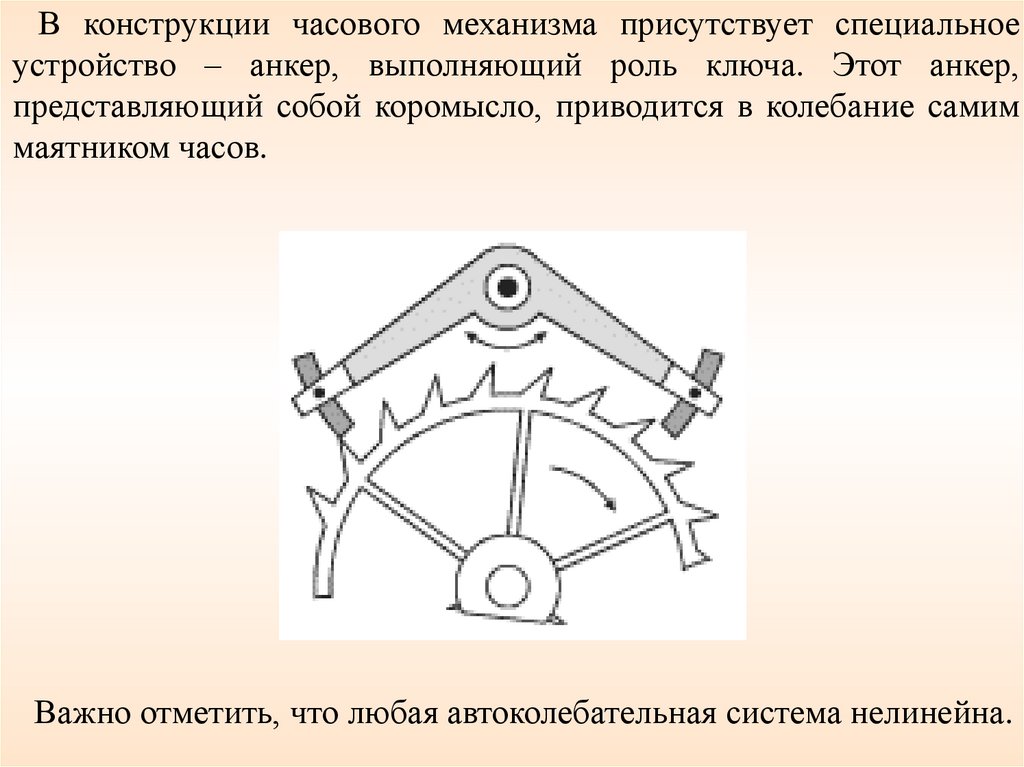
В конструкции часового механизма присутствует специальноеустройство – анкер, выполняющий роль ключа. Этот анкер,
представляющий собой коромысло, приводится в колебание самим
маятником часов.
Важно отметить, что любая автоколебательная система нелинейна.