





 Электроника
ЭлектроникаПохожие презентации:







")


Электроприводы постоянного тока
1. ЭЛЕКТРИЧЕСКИЙ ПРИВОД
2. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Основные уравненияСхема электропривода с двигателем постоянного тока
М = kФI - электромагнитный момент (1),
где k- конструктивный параметр машины
E = kФ - ЭДС вращения (2)
U-E = IR - со вторым законом Кирхгоффа для якорной цепи машины (3)
I
U E
R
3.
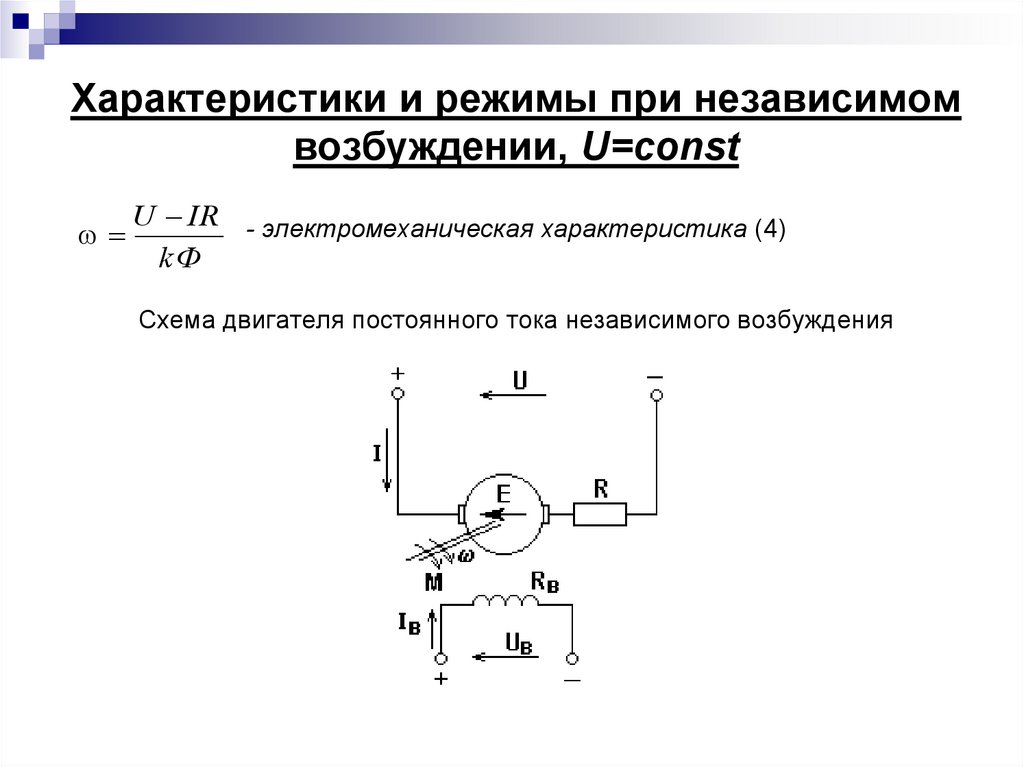
Характеристики и режимы при независимомвозбуждении, U=const
U IR - электромеханическая характеристика (4)
kФ
Схема двигателя постоянного тока независимого возбуждения
4.
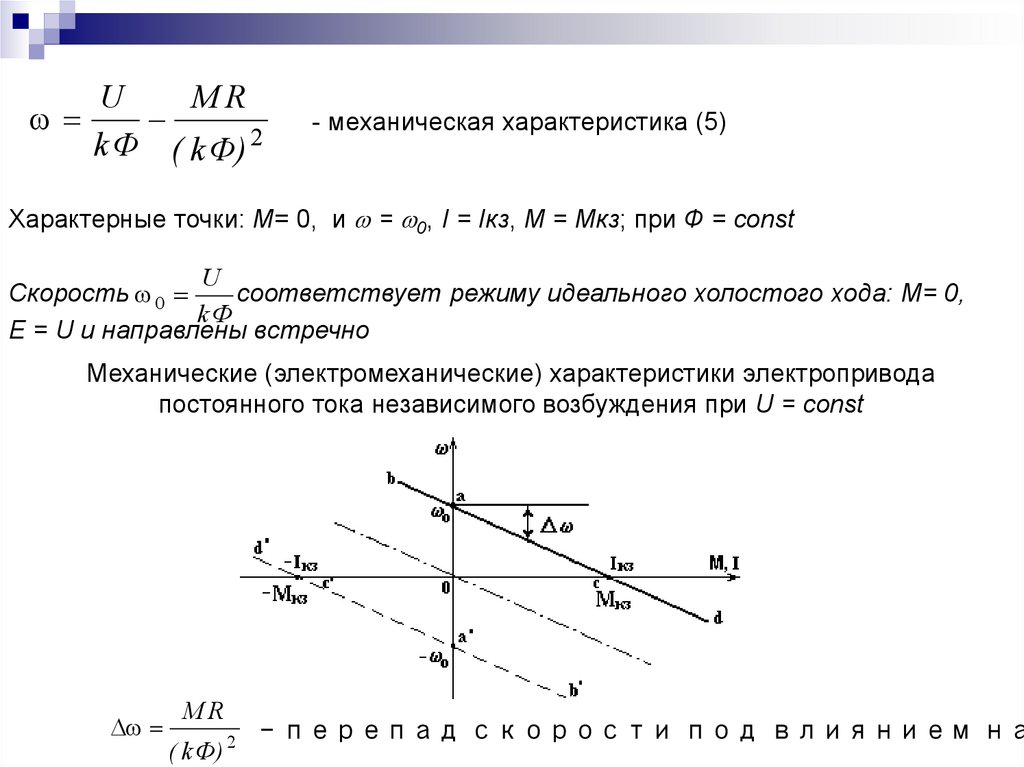
UMR
kФ ( kФ) 2
- механическая характеристика (5)
Характерные точки: М= 0, и = 0, I = Iкз, М = Мкз; при Ф = const
U
Скорость 0
соответствует режиму идеального холостого хода: М= 0,
kФ
E = U и направлены встречно
Механические (электромеханические) характеристики электропривода
постоянного тока независимого возбуждения при U = const
MR
( kФ)
2
– перепад скорости под влиянием на
5.
Тормозные режимы:•Торможение с отдачей энергии в сеть (рекуперативное) или генераторный
режим работы параллельно с сетью;
•Торможение противовключением или генераторный режим работы
последовательно с сетью
U E
Первый случай
R
U E
I
Второй случай
R
I
•Динамическое торможение или генераторный режим работы независимо
от сети
I
E
R
6. Характеристики и режимы при независимом возбуждении, I=const
Схема и характеристики электропривода двигателя постоянного тока независимоговозбуждения при питании от источника тока
I = const
М = kФI = const
U = E + IR = kФ + IR,
(6)
(7)
(8)
7. Характеристики и режимы при последовательном возбуждении
Схема двигателя постоянного тока последовательного возбужденияХарактеристика намагничивания машины постоянного тока
8. Зависимость между скоростью двигателя и развиваемым им моментом в установившемся режиме
Поток возбуждения и ток в якоре двигателя связаны между собой линейнойзависимостью
Ф I
Тогда
U
R
k I k
M = kФI = k I2,
а поскольку
то
U
R
k M k
.
(9)
(10)
(11)
Механическая
характеристика двигателя последовательного возбуждения
.
.
9.
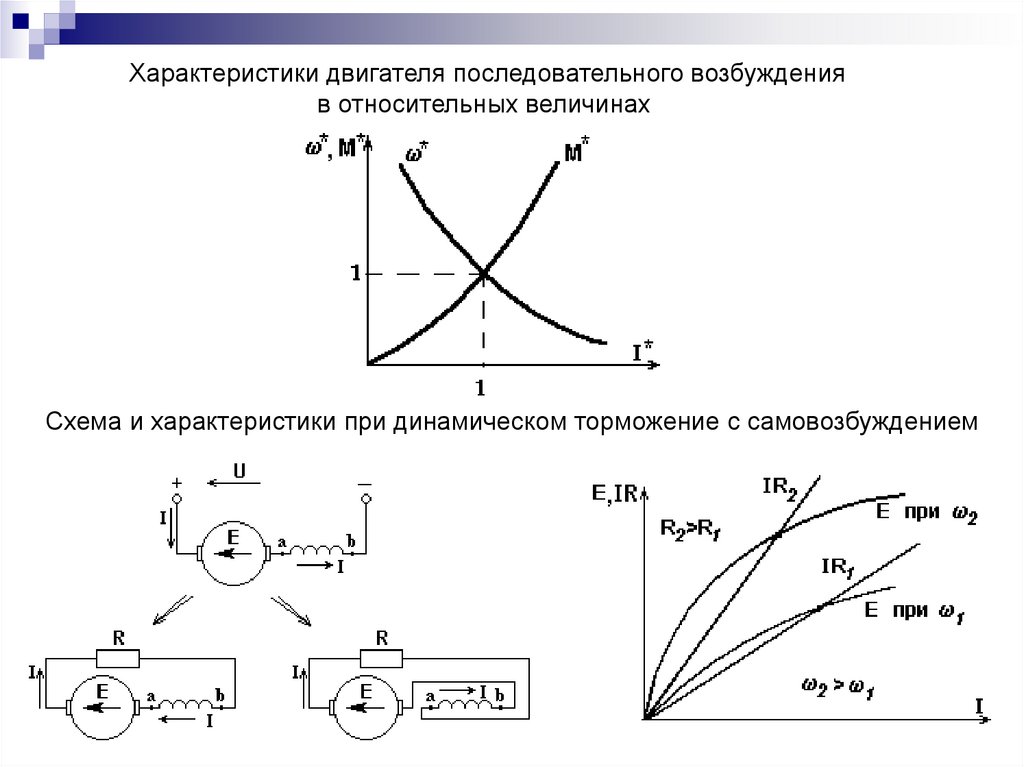
Характеристики двигателя последовательного возбужденияв относительных величинах
Схема и характеристики при динамическом торможение с самовозбуждением
10.
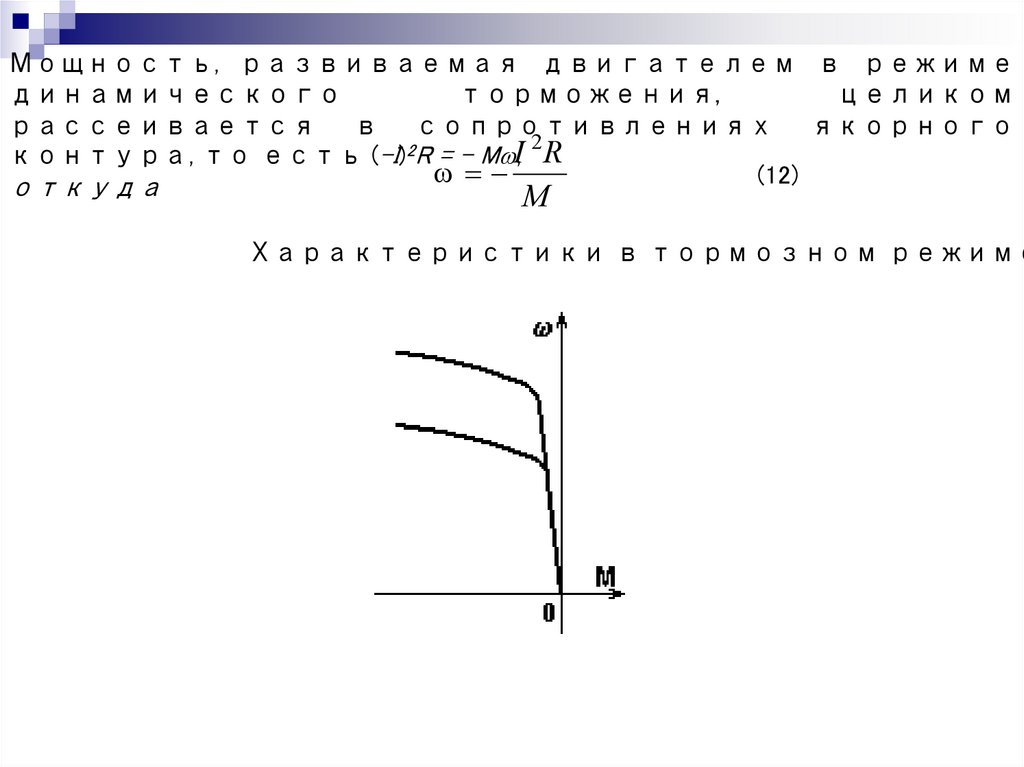
Мощность, развиваемая двигателем в режимединамического
торможения,
целиком
рассеивается в сопротивлениях якорного
2
контура, то есть (-I)2R = – M I, R
(12)
откуда
M
Характеристики в тормозном режиме
11. Номинальный режим. Допустимые значения координат
Номинальные данные: номинальные напряжение Uн, В; ток Iн, А; мощность на валу Рн,n
кВт; частота вращения nн, об/мин ( н н , 1/c); КПД н; напряжение возбуждения Uвн,
30
В; ток возбуждения Iвн (для двигателей независимого возбуждения), момент инерции Jн,
кг м2, исполнение двигателя IP.
0
Uн
и Мн = kФнIн
kФн
U н I нR я
kФн
н
(13)
Половина номинальных потерь Рн – это потери в меди обмотки: 0,5 Рн Iн2Rя,
откуда
0,5 Р н
U
(14)
Rя
0,5 н ( 1 u )
I н2
Iн
Номинальный электромагнитный момент Мн = kФнIн
Номинальный момент на валу M н.вал
Pн
н
12.
Приняв за базовые величины Uн, Iн, н, kФнпреобразований:
*
*
U * I * R *
Ф*
U*
*
Ф
все относительные величины определены как
X*
Тогда, приняв U* Ф* = 1, получим:
или при I* = 1 (при номинальном токе)
Uн
Uн
R
и н
I н , получим после простых
0
M *R*
( Ф* ) 2
X
Xб
* = 1 – I*R*
* = 1 – R*.
(15)