







")














")


 Электроника
ЭлектроникаПохожие презентации:


")





")

Структурная схема компьютера
1. Структурная схема компьютера
ПроцессорУстройство управления
ВИДЕО
АУДИО
АЛУ
Регистровая память
КЭШ-память (Level 1)
Жесткий диск
Гибкий диск
(CD…)
Модем
Оперативная
память
Принтер
1
2. Системная шина
Передаваемую информацию можно условно разделитьна 3 вида:
Данные – обрабатываемые числовые значения
Адреса – сведения о местонахождении данных
Управляющие сигналы – указывают направление потокам
данных и регламентируют обмен данными
Набор линий, предназначенных для передачи одного вида
информации, называют шиной
• Шина адреса
• Шина данных
• Шина управления
2
3. Системные шины
Шина (bus) – общий канал связи, соединяющийотдельные части компьютера (пучок проводов)
Перенос информации происходит по
параллельным линиям (проводам)
Один бит – одна линия
Их количество называют шириной шины
• Шина адреса
• Шина данных
• Шина управления
3
4. Шина управления
• Микропроцессор выставляет на шине управлениякоманды управления узлами системы и
получает
ответные сигналы о состояния узлов
и подтверждение выполнения команды
4
5. Ширина шины адреса и шины данных– важнейшие характеристики микропроцессора
• i8086 –20-разрядная шина адреса
– 16-разрядная шина данных
• Pentium – 64-разрядная шина адреса
– 64-разрядная шина данных
Но…32-разрядная внутренняя архитектура !!!
Исторически в величинах с
двоичной адресацией (память) –
Килобайт = 210
Для жестких дисков может быть
Килобайт = 1000 байт
Ширина шины адреса
устанавливает ограничение
на объем ДОСТУПНОЙ ОП
210 = 1 Kб
220 = 1 Мб
230 = 1 Гб
240 = 1 Тб
Кило (киби), мега (меби) , гига (гиби) ,
тера, пета, экса (exa), зетта, йотта …
Кило = 1000 десятичные величины
= 1024 двоичные величины
5
6. Внутренняя шина
• Три шины вместе (шина адреса, шина данных,шина управления) составляют
процессорную (внутреннюю) шину
• Шина адреса и шина управления –
однонаправленные (передача в одном
направлении - из микропроцессора)
• Шина данных – двунаправленная (данные
считываются и выдается результат)
6
7. Структурная схема компьютера
ПроцессорУстройство управления
ВИДЕО
АУДИО
АЛУ
Регистровая память
КЭШ-память (Level 1)
Жесткий диск
Гибкий диск
(CD…)
Модем
Оперативная
память
Принтер
7
8. Структура микропроцессора
Устройствоуправления
Регистры
8
9. Системная шина (Front Side Bus, FSB)
Системная шина (Front Side Bus, FSB)• Микропроцессор напрямую работает только с несколькими
устройствами, а от остальных отделен специальными
микросхемами-буферами (для усиления проходящих сигналов).
• После буферов шины адреса, данных и управления совместно с
некоторыми дополнительными сигналами образуют другой канал
обмена информацией – СИСТЕМНУЮ ШИНУ
– соединяет процессор с другими внутренними устройствами
– понятия «северный мост», «южный мост» (IT Essentials – Cisco)
• Системная шина характеризуется частотой системной
шины (образуется из тактовой частоты)
Вторичные шины работают на «своих» частотах, производных от частоты
системной шины (коэффициент)
9
10. Структура микропроцессора
1011. Тактовая частота
• Управление процессоромосуществляется
с помощью сигналов – тактовых импульсов,
которые выдаются через фиксированные интервалы времени
специальным устройством – тактовым генератором.
• Промежуток между тактовыми импульсами – такт.
• Такт - минимальная временная единица в системе.
Длительность одного такта – важнейший параметр,
определяющий производительность процессора (Т)
• Для выполнения машинной команды процессор подразделяет ее на
последовательность шагов, каждый из которых может быть
выполнен за один такт.
11
12. Тактовая частота
Длительность одного такта – ТТактовая частота процессора
R=1/T
(количество тактов в секунду).
1 Герц (Гц) = 1 такт в секунду
Первые 4,77 МГц
Pentium --- 60 МГц
Pentium III --- 500 Мгц 500 миллионов тактов в секунду
Pentium 4 ---- 1,3 – 1,5 ГГц
тактовая частота ядра микропроцессора 3 ГГц 3 миллиарда
12
13. Тактовая частота современных процессоров
Тактовая частотасовременных процессоров
• Она определяется умножением внешней или
базовой частоты, на определённый коэффициент.
Например, процессор Intel Core i7 920 использует
частоту шины 133 МГц
и множитель 20
тактовая частота равна 2660 МГц
Тактовая частота системы = тактовая частота системной шины
Тактовые частоты всех остальных компонентов ПК
кратны частоте системной шины
13
14. Тактовая частота современных процессоров составляет 1,0-4 ГГц
Тактовая частота современныхпроцессоров составляет 1,0-4 ГГц
• 2-3 ГГц – офисный ПК
• 3.5 ГГц – геймерский ПК среднего уровня
• 4 ГГц – мощный игровой или профессиональный ПК
Топовый Intel Core i7-8086K =
• 6 вычислительных ядер
• (технология HyperThreading)
• базовая тактовая частота 4.0 ГГц
14
15. Тактовая частота
• Решает задачу синхронизациифункционирования всех компонентов
системы
(их действия должны быть «увязаны» между собой, время работы
должно измеряться в одинаковых интервалах)
• Тактовая частота используется для формирования
РАБОЧЕЙ (СИСТЕМНОЙ) частоты
(на рабочей частоте процессор взаимодействует с памятью).
• Из рабочей частоты образуется частота системных шин.
• «Внутри себя» (ядро) микропроцессор работает на более высокой
частоте (начиная с i486).
• Внутренняя частота процессора образуется путем умножения
системной частоты на некоторый коэффициент.
15
16.
• Первые ПК имели один тактовый генератор,который с частотой 8 МГц синхронизировал
работу процессора, памяти и шин
• Современные ПК оборудованы 4-5-тактовыми
генераторами, работающими синхронно на
различных частотах
16
17. Набор команд Архитектуры CISC и RISC
• Две основные архитектуры наборакоманд - CISC и RISC
• CISC – Complete Instruction Set Computer
Архитектура с полным набором команд
Микропроцессоры Intel
• RISC – Reduced Instruction Set Computer
Архитектура с сокращенным набором команд
Популярны во всем мире, т.к. на такой архитектуре работают
рабочие станции и серверы под управлением ОС Unix
Разработанf первоначально компанией IBM
17
18. Принципы RISC-архитектуры
• Каждая команда выполняется за один такт (долженбыть максимально коротким)
• Все команды имеют одинаковую длину и формат
(упрощение логики управления процессором)
• Обработка данных происходит только в регистрах
процессора, обращение к памяти только при
операциях чтения и записи
• Система команд должна обеспечивать поддержку языка
высокого уровня
50 инструкций в архитектурах 1 поколения
Около 150 инструкций в современных RISC-процессорах
18
19. Особенности СISC-архитектуры
• В систему команд добавлены «удобные» дляпрограммиста команды (маленькие подпрограммы)
Ускорение разработки программ
Команды CISC-процессора имеют разную длину и
время выполнения
Некоторые команды выполняются за несколько тактов
Производительность ниже
19
20. ДЛИНА И ФОРМАТ МАШИННОЙ КОМАНДЫ
Команда (код операции, КОП) <операнд1>,<операнд2>
КОП -1 байт, Оп1 – 1-2 б, Оп2 – 1-2 б
Итого?
mov ax, 3
операнд1,операнд2 — команда сложения
mov bx, 2add
с принципом действия:
операнд1 = операнд1 + операнд2
add ax, bx
Move – двигать, положить
Jump – прыгать, прыжок
Команда перехода (КОП) <адрес>
Прямой переход – указан адрес (метка)
Косвенный переход – указан регистр, где хранится адрес
jmp Label N
jmp eax
20
21.
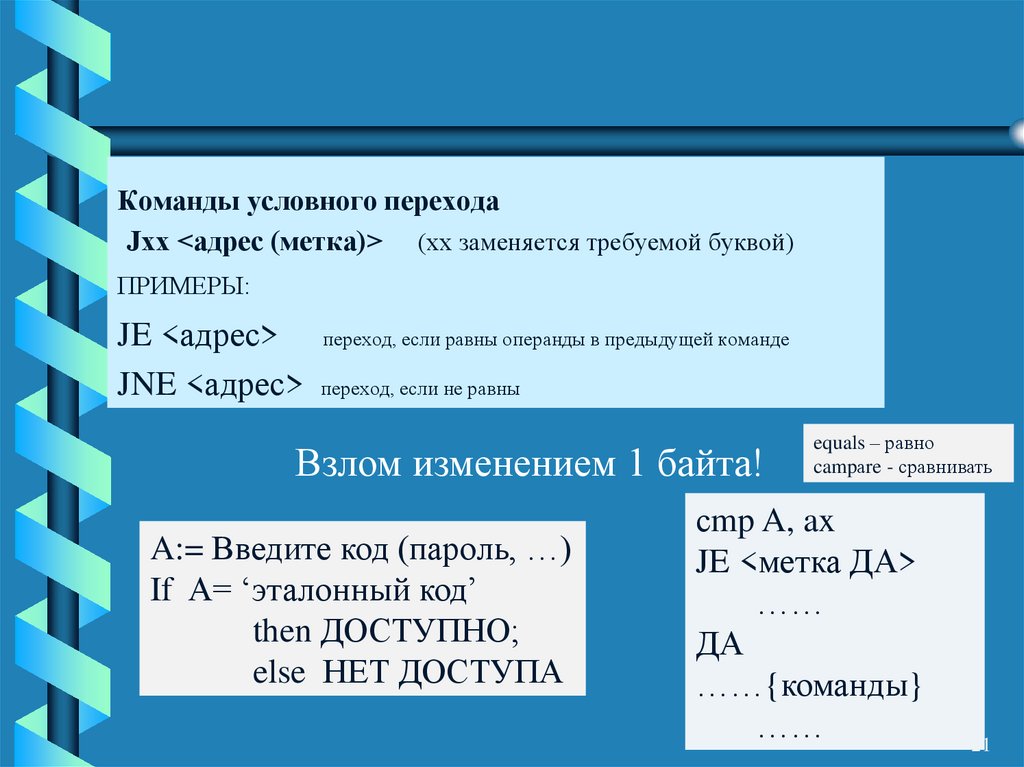
Команды условного переходаJxx <адрес (метка)> (хх заменяется требуемой буквой)
ПРИМЕРЫ:
JE <адрес>
JNE <адрес>
переход, если равны операнды в предыдущей команде
переход, если не равны
Взлом изменением 1 байта!
A:= Введите код (пароль, …)
If A= ‘эталонный код’
then ДОСТУПНО;
else НЕТ ДОСТУПА
equals – равно
campаre - сравнивать
сmp A, ax
JE <метка ДА>
……
ДА
……{команды}
……
21
22.
• CISC и RISC – принципы и технологии.• «Архитектура каждого конкретного процессора
представляет собой результат множества
компромиссов» (Хамахер и др.)
• CISC-процессоры – персональные
компьютеры
• RISC-процессоры –
высокопроизводительные серверы и
рабочие станции
22
23. Материнская плата
Основной элемент компьютера –материнская (системная) плата вместе с
микропроцессором
Предназначена для
- обеспечения бесперебойной работы процессора;
- обеспечения эффективной работы компьютера.
23
24. Материнская плата
Основные компоненты материнской платы• Постоянное запоминающее устройство – ПЗУ
• Оперативное запоминающее устройство – ОЗУ (ОП)
• Энергонезависимая память (CMOS-память)
• Тактовый генератор
• Таймер
• Блок обработки прерываний (контроллеры
прерываний)
• Блок прямого доступа к памяти
24
25. Постоянное запоминающее устройство – ПЗУ
• Память только для чтения• Не предусмотрено изменение содержимого
пользователем.
• После отключения питания содержимое ПЗУ
сохраняется.
• Содержит следующие программы:
- базовую систему ввода-вывода – BIOS (Basic Input
Output System)
- первоначального тестирования работоспособности
компьютера – POST (Power On Self Test)
- изменения информации CMOS-памяти - Setup
25
26. Энергонезависимая память (CMOS-память)
• Хранится информация- об устройствах системы и их параметрах (дисковая
подсистема);
- необходимая при каждом запуске (например,
порядок загрузки компьютера)
26
27. Мультипроцессорные системы
Система, содержащая несколько (много)процессоров, называется многопроцессорной
(мультипроцессорной)
• Процессоры выполняют параллельно несколько задач
(несколько подзадач одной большой задачи)
• Все процессоры имеют доступ ко всей памяти системы
– мультипроцессорная система с общей
памятью
• Высокая производительность
• Высокая стоимость (большое количество
процессоров, большой объем памяти, сложные
схемы управления)
27
28. Мультикомпьютерные системы
Мультикомпьютерные = многомашинныесистемы - соединенные группы
компьютеров
• Каждому компьютеру доступна только своя
память
• Обмен данными через пересылку сообщений
• Кластер – группа компьютеров,
объединенных для решения одной задачи
28