








")











")
















")




























































 Программирование
Программирование Промышленность
ПромышленностьПохожие презентации:




")





Системы программного управления промышленными установками
1. Структура курса
«СИСТЕМЫ ПРОГРАММНОГО УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМИ УСТАНОВКАМИ»Структура курса
• Введение, литература, классификация
• Программируемые логические контроллеры (ПЛК)
• Непрерывные системы ЧПУ с аппаратной реализацией
алгоритма
• Микропроцессорные системы ЧПУ
Лекции -18ч., практ.-36
Лабораторные работы – 36ч.
Курсовой проект !?
1
2. Список литературы
Сосонкин В. Л., Мартинов Г. М. Системы числового
программного управления: Учеб.пособие 296 с- М.: Логос 2005.
Босинзон М. А. Современные системы ЧПУ и их эксплуатация:
Учебник 192 с.М.: Академия 2006
Ловыгин А. А., Теверовский Л. В. Современный станок с ЧПУ и
CAD/CAM-система. – М.: ДМК Пресс, 2012. - 279 с.
Гусев Н.В., Букреев В.Г. Системы цифрового управления
многокоординатными следящими электроприводами: учебное
пособие -Томск:Изд-во Томского политехнического
университета, 2010. – 213 с.
Шандров Б. В. Технические средства автоматизации-М.:
Академия 2007.
2
3. Список литературы
ЧерновЕ.А . Проектирование станочной электроавтоматики.
Машиностроение, 1990г.
Применение программируемых контроллеров в
промышленных установках. Изд. МЭИ, 2001 г.
ДеменковН.П. Языки программирования промышленных
контроллеров. Изд. МГТУ им. Баумана, 2004 г.
Парр Э. Программируемые контроллеры. Руководство для
инженера: Пер. с англ. 516 с.М.: Академия3-е изд. 2007.
Минаев И.Г., Самойленко В.В. Программируемые логические
контроллеры: практическое руководство для начинающего
инженера. Ставрополь: АГРУС, 2009г.-100 с.
3
4. РТК совокупность технологического оборудования с программным управлением, промышленных роботов и средств оснащения, которая автономно
Гибкая производРоботизированный технологический комплекс
РТК1
УЧПУ
ад
овок
СУР
Станок
СО
ПР
РТК совокупность
технологического оборудования с
программным управлением,
промышленных роботов и средств
оснащения, которая автономно
функционирует и совершает
многократные циклы.
РТК=ТО+ПР+СО
СО - средства оснащения
4
5. Совокупность РТК в различных сочетаниях образует гибкую производственную систему
Структура ГПССовокупность РТК в различных сочетаниях образует гибкую
производственную систему
Гибкая производственная система
РТК1
УЧПУ
Склад
заготовок
СУР
РТК2
РТКN
Станок
СО
…
Склад
готовой
продукции
ПР
Транспортная
система
5
6. Состав ГПС
ГПС можно разделить на ряд подсистем:подсистема обработки;
подсистема транспортирования,;
подсистема складирования;
подсистема инструмента и приспособлений;
подсистема контроля;
подсистема управления;
подсистема автоматического проектирования.
6
7. Преобразование информации в СПУ
Система программного управления система преобразованияинформации включающая три группы машин:
• энергетические (двигатели);
• технологические (станок, манипулятор);
• информационные (вычислительные устройства).
Процесс преобразования информации в СПУ
Чертеж
Устройство
подготовки
про грамм
Сигналы
управлен
ЭП
Привод
подачи
Кодиров.
перфолента
Считывающее
устройство
Коды
опорных
точек
Форма
изделия
Контрольно
измерительное
устройство
Результ
из мерен
Вычислит
устройство,
интерполятор
7
8. Историческая справка
1932 г. разработана первая позиционная система программногоуправления нажимными устройствами прокатного стана
1952 г.
разработана первая станочная система ЧПУ для контурной
обработки
1958 г. – появился первый промышленный манипулятор с ПУ
1961 г. – разработана система управления группой станков от ЭВМ
1970 г. – управление станком от индивидуальной микро ЭВМ
1970 г. - начат выпуск программируемых контроллеров для
управления дискретными автоматическими системами
8
9. Устройство обжимного прокатного стана
910. Функциональная схема импульсно-шаговой СЧПУ (1962 г.)
РОХ
ФСУ
ЛИ
У
УУШДх
ШДх
ГУх
УУШДу
ШДу
ГУу
10
11. Компановка многооперационного станка
инструментальный магазиншпиндель
ШБ
стойка
поворотный стол
продольный стол
поперечный стол
станина
11
12. Накопители инструментов
Накопители инструментов: -револьверные головки-инструментальные магазины
-инструментальные склады
Виды револьверных головок
РП
РП
ОГ | | ОШ
ОГ ОШ
РП – рабочая позиция
ОГ – ось головки
ОШ ОГ
ОШ – ось шпинделя
12
13. Кинематика электропривода подачи
Ходовой винт – гайка качения13
14. Кинематика электропривода подачи
Сильфонная муфта14
15. Классификация систем ЧПУ
По способу задания программы системы можноразделить на три группы:
• с заданием в аналоговой форме
• с заданием программы в функции пути
• с заданием программы в числовой форме
15
16. СПУ с заданием в аналоговой форме
На потенциометрахУстройство обработки
программы
САУ ЭП
СТ
G
С
РО
На базе ЗУ и ЦАП
RAM
A
D
Uрп
Uз
Uэ
Uп
16
17. Задание программы в функции пути
Пример организации системыРЦ
Uп
Y1
ФИ1
SQ1
Y2
1
С
ФИ n
SQn
СТ
Yk - исполнительные
механизмы электромагниты
DC 0
R
m
НУ
Элементы
контроля
Формирователи
импульсов
Счетчик
Дешифратор 2/10
- места возможных соединений
Матрица
РЦ - разрешение цикла
- разделительные диоды в матрице
РЦ
Y1
SQ1
ФИ1
Y2
17
18. Классификация СЧПУ
Системы ЧПУ можно разделить по ряду признаков.По способу реализации алгоритма и набору функциональных возможностей:
NC,
CNC,
PCNC
По виду движения механизма и характеру геометрической информации:
позиционные,
контурные,
комбинированные.
По числу потоков информации:
разомкнутые,
замкнутые,
адаптивные.
18
19. Деление СЧПУ по числу потоков информации
РО1
УЧПУ
Разомкнутая СЧПУ
ШД
РО
1
УЧПУ
СУ ЭП
Замкнутая СЧПУ
Д
ИПП
ТГ
2
ИПП - измерительный преобразователь перемещений
3
РО
1
УЧПУ
СУ ЭП
Адаптивная СЧПУ
Д
ИИП
ТГ
2
19
20. СПОСОБЫ РЕАЛИЗАЦИИ СИСТЕМ ЭЛЕКТРОАВТОМАТИКИ
Жесткая логикаРелейно-контактные схемы
Бесконтактные лог элементы
–
Магнитные
–
Полупроводниковые
–
Интегральные
Гибкая логика
Программируемые логические матрицы
• Программируемые логические
контролеры
20
21. Программируемые логические матрицы
Пример структуры ПЛМX1
x1
X2
Y1,2...m =
x2
k
X (X ) X (X ) X (X
1
1
2
2
n
1
Xn
xn
1
2
&
&
&
Z1
Z2
Zk
3
ПЗУ как логическое устр.
1
Y1
X1
X2
A
1
Ym
Xn
Y1
PROM
D
Ym
1. Входные буферные каскады
2. Подматрица логического умножения
3. Подматрица логического сложения.
21
n
)
22. Программируемые логические контроллеры (ПЛК)
Конфигурация систем электроавтоматики с использованием ПЛКПЛК
Un вх
SB1
Un вых
8
7
00
00
К1
01
К2
SQ1
01
SQ2
ЗУ
02
HL1
02
П
SA1
1
2
n
m
ОШ
ОШ
3
4
5
Y1
6
7
22
23. Цикл работы ПЛК
Цикл ПЛКY(i +1) = f[Y(i),X(i)]
Включение
питания
Начальный
запуск
Диагностика
1Ф
Обнуление
выходов
2Ф
3Ф
2Ф
3Ф
SB
или
ПК
SB
1 фаза
2 фаза
1Ф
tmax=2Tц
SB
К
К
К
tmin=2Tц
3 фаза
23
24. Структура ЦП и управляющей памяти ПЛК
ТДЗУ
Xi
Yi
Mi
ЦП
ТД - таблица данных.
СК
РК
КО АО
ЗО
ПРП
МП - модуль процессора.
ДК
РА
РО
РС
ПРП - память рабочих
программ.
КО - код операции.
АО - адрес операнда.
ЗО - защищаемая область.
СК - счетчик команд.
РД
РК - регистр команды.
МП
ДК - дешифратор команды.
РА - регистр адреса.
РД - регистр данных
Мвх/вых
РО - одноразрядный рег. Аккум.
Мвх
16
Мвых
АПУ
ППО
РС- регистр стека.
16
+
-
+
-
24
25. Связь логического и физического адресов
15ТД ЗУ
0
Внутренняя
шина
0
Область
X
0 1 2
10
15
10
ИП МП
15
X3
X11
X15
X1 X2
ППО
220
Фрагмент стыковочной таблицы
-
+
SB1
Nнр Nр
Адрес
Назначение сигнала
SB2
1А Х1
0000
Кн. пуск
0001
Стоп
2А
16А
1В
ИП МП
0015
Ограничение+Х
Общая
точка - Источник питания. ВходY
1В
1А
Модульный ПЛК
Х1
0016
Обща
точка
я
Готовность устройства ЧПУ
25
26. Модули входов выходов ПЛК
Модули входов выходов ПЛК выполняют следующие функции:1. гальваническая развязка
2. промежуточное хранение
3. приведение уровня сигналов
4. усиления по мощности
5. индикация состояния входов/ выходов
6. защита выходов от короткого замыкания
26
27. Модули входов выходов ПЛК
Модули входов выходов ПЛК различаются:1. по виду сигнала (дискретные и непрерывные);
2. по роду тока (постоянный и переменный);
3. по типу элемента гальванической поры (оптроны или герконовые реле);
4. по уровню напряжения и тока (U=5,12,24В DC/ U=110, 220B AC)
5. по числу ячеек ввода / вывода
6. по способу подключения внешних цепей (разъем или клемная рейка)
27
28. Входные модули ПЛК
Примеры схемотехники входных модулей1)
-
Объект
Модуль
То же при
переменном
токе
+
+5В
К внутренним
цепям ПК
2)
-
+
320 Ом
+U
i
28
29. Входные модули ПЛК
Примеры схемотехники входных модулей3)
-
+
1К
100
VT2
+5В
5.1К
60К
2К
VT3
1.7В
VT1
60К
К внутренним
цепям ПК
1К
+U
+
110В
29
30. Примеры схемотехники выходных модулей
5В+1)
Y
такт
На постоянном
токе
С релейным выходом
Д ТТ
Q
С
На переменном
токе
-
+5В
Y
такт
Uп
+
С транзисторным выходом
Д ТТ
Q
С
К другим
ключам
ОМ
+5В
30
31. Примеры схемотехники выходных модулей
С симисторным выходом+5В
АОТ101
Y
такт
110В
КЦ407
КЦ103В
ТС122-10-7
Д ТТ
Q
С
+
ОМ
+
7
Q ТТ R
‘1’-авария
к ЦП
Q
S
31
32. Метод циклограмм
Д3Д1
Метод циклограмм
Д2
КнЦ
БВп
Д1
МВп
Вход
Д2
КнЦ Д3
1
БНз
БВн = 1
Д3
0
Д1
МВп = БВп Д2 БНз Д3
БНз = БВп Д1 МВп Д3
БВп синтезируется как элемента памяти
БВпS = КнЦ Д 3
БВпR = Д1
0
КнЦ
Д3
БВп
Д1 БНз
S
БВп
R
МВп
Д2
Д3
1
БВн = 0
МВн = 1
0
Д2
S
МВп
1
БНз = 1
МВн = 0
R
БНз
Д3
S
БНз
0
1
БНз = 0
R
32
33. Программирование на языке символьного кодирования
Список базовых инструкции ПЛК NS 915№
X символ
содержание инструкции
инструкции
1
LD XXXX
X R0 и RSn+1 – загрузка адресуемого операнда в
одноразрядный регистр-аккумулятор и n+1 разряд
стека
2
LC XXXX
X R0 и RSn+1
3
+D XXXX
X+R0 R0 и RSn
4
+C XXXX
X+R0 R0 и RSn
5
*D XXXX
X*R0 R0 и RSn
6
*C XXXX
X*R0 R0 и RSn
7
+
RSn + RSn-1 R0 и RSn-1
8
*
RSn*RSn-1 R0 и RSn-1
9
WR XXXX
R0 ТД – переписывается в таблицу данных по
указанному адресу
33
34. Программирование для ПЛК «МикроДАТ»
№ слова1 -й байт
2 -й байт
000
001
1 -й байт
Область выходов
первого каркаса
17
007
010
-й разряд 1
07
01
-го байта
Область выходов
второго каркаса
Сводная область
48х16
077
10 0
адреса восьмеричные
Область входов
первого каркаса
107
110
Область входов
второго каркаса
117
120
Сводная область
48х16
177
200
ЗО
10
17 – 7
01 7
020
217
220
0 -й байт
ТД
Область хранения
констант
РСТ
НБЛ
000
000
НПП
77
конец программы
Начиная с адреса 120
распределять память
можно самому
ПРП
3677
3707
Служебная область
34
3777
35. Адресация переменных ПЛК «МикроДАТ»
ИП МП0
00
1
01
10
7
11
70
71
№ пары
№ модуля
Адрес логической переменной восьмеричный
ХХХХХ
Адрес слова
№ байта (0 или 1)
№ разряда (0 7)
Эти цифры так же можно трактовать как физический адрес
-
ХХХХХ
Тип модуля (для выходов – 0, для входов – 1)
№ каркаса (1 каркас – 0, 2 каркас – 1)
№ пары модулей в каркасе (0
7)
№ модуля в паре (0 или 1)
№ ячейки модуля
35
36. Назначение слов служебной области ПЛК МикроДАТ
АдресНазначение
3700
маска обмена выходов первого каркаса
3701
маска обмена выходов второго каркаса
3702
маска обмена входов первого каркаса
3703
маска обмена входов второго каркаса
3704
адрес начала защищаемой области
3705
адрес начала памяти рабочей программы
3706
время цикла (377 max)
3707
контрольная сумма для всей информации защищаемой области
3710-3713
информация о состоянии сегментов и блоков
3714,3715
системные отказы и сбои
3716
отказы модулей первого каркаса
3717
отказы модулей второго каркаса
36
37. Пример составления маски обмена для ПЛК «МикроДАТ»
00 0160 61
ИП МП X X X X X Y Y Y X X X X Y Y ЦАП АЦ
П
старший байт
младший байт
71
70
61
60
51
50
41
40
31
30
21
20
11
10
01
00
—
—
Y
Y
X
X
X
X
Y
Y
Y
X
X
X
X
X
0
0
1
1
0
0
0
0
1
1
1
0
0
0
0
0
0
0
6
0
0
0
0
1
0
1
1
1
7
3
1
0
4
0
0
0
1
3
1
1
7
маска выходов
1-го каркаса
0
1
адрес модуля
1
маска входов
1-го каркаса
37
38. Информационная связь ПЛК – КОМП.
Информационная связь ПЛК - ППОПЛК
ППО
+ПрД
-ПрД
+ПД
-ПД
+5
ат
+ПрД
-ПрД
+ПД
-ПД
+5
ат
1
2
3
4
14
16
ППО - прибор
программирования и отладки
ПрД- прием данных
ПД- передача данных
Преобразователь интерфейса
+12
+ПД
RxD
GND
-ПД
Передача информации.
Преобразует сигналы ‘
токовой петли’ в потенциалы
RS 232 .
-12
TxD
+12
2К
250
2К
VT
Прием информации.
Преобразует потенциалы
RS232 в сигнал ‘ токовой
петли’.
+ПрД
38
-ПрД
39. Источник питания (DC/DC конвертор)
+5+12
VT1
VT1.1
VT1.2
От 16
VT2
-12
39
40. Функциональная схема СЧПУ класса NC
4041. Схема шифратора клавиатуры
4142. Построение ФСУ
45
2
1
8
+
пуск
стоп
6
3
10
+
7
S
R
ТГ
Q
Q
9
1 – перфолента
2 – транспортирующий электромагнит
3 – обрезиненный ведущий ролик
4 – осветитель
5 – цилиндрическая линза конденсор
6 – светоприёмники
7 – усилители сигнала
8 – тормозной электромагнит
9 – схема управления
10 – приемное устройство
42
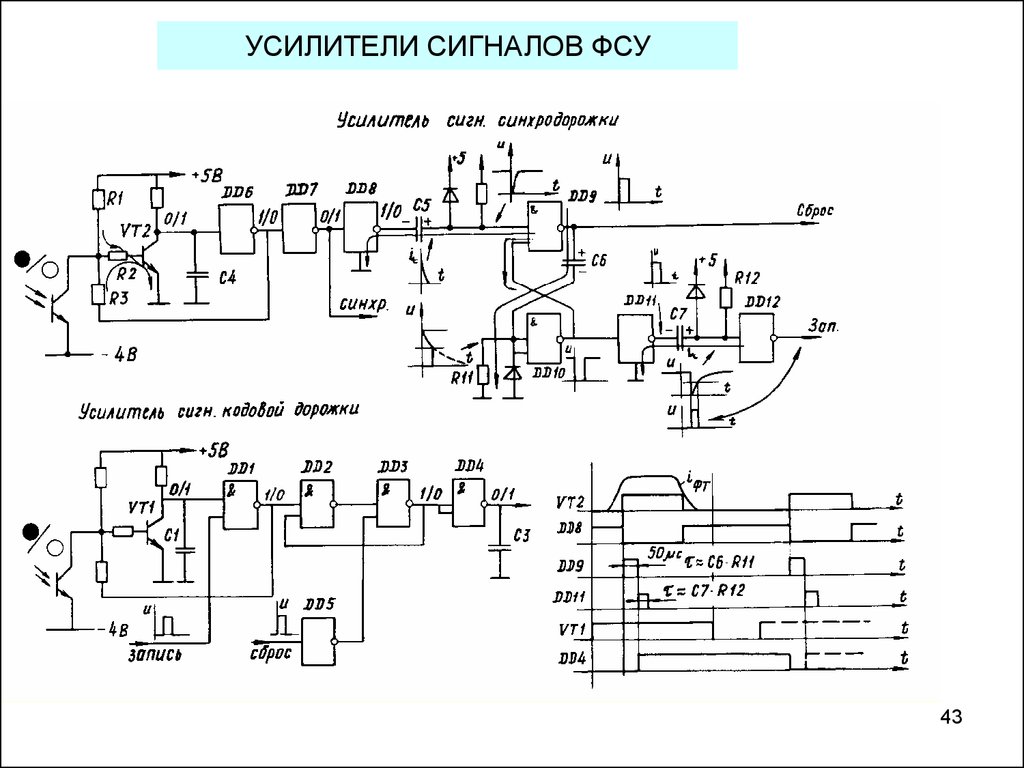
43.
УСИЛИТЕЛИ СИГНАЛОВ ФСУ43
44. Блок ввода программы
4445. СТРУКТУРНАЯ СХЕМА БВП Н33
Контроль на четность1рРВР
=
=1
=
=1
=1
=1
- не 1 четный
(сбой)
0 – четное
(норма)
=1
8рРВР
45
46. Схема дешифратора адреса
G X1рРВР
1 0
&
2рРВР
1 0
&
3
S ТТ Q
R
Q 4
&
5
S ТТ Q
R
Q 6
&
S ТТ Q 7
R
Q 8
&
9
S ТТ Q
R
Q 10
3рРВР
1 0
1
S ТТ Q
R
Q 2
2
&
4
6
7
9
X
4рРВР
0 1
5рРВР
0 1
7рРВР
1 1
&
t6
t5
&
&
G
ПрА
СбрА
Определитель Входные Регистр адреса
адреса
вентили
Дешифратор
адреса
46
47. Интерполятор на ДДС
D110
D2
10000
D3
1000
D4
100
10
1
8 4 2 1
1 2 3 4 5 6 7 8 9 10
5000
0 1 0 1
5
0 1 1 1
7
2
90
700
1 0 0 1
9
1
5792
0 0 1 0
2
1
2
4
8
47
48. Алгоритм линейной интерполяции по методу ОФ
4849. Функциональная схема линейного интерполятора по методу ОФ
4950. Алгоритм круговой интерполяции по методу ОФ
5051. Функциональная схема кругового интерполятора по методу ОФ
5152. Функциональная схема выходного блока интерполятора
блокировках
И
fи=50кГц
БЗС
&
Rx
y
Ry
&
z
Rz
&
fо=6-10
кГц
1
ВБ=2
F
F
F
ШХ
ШY
ШZ
52
53. Структурные схемы дискретного привода
Варианты дискретного приводаРО
СШД
В
Н коммутатор
УМ
m
ШД
РО
НСШД
В
Н коммутатор
УМ
m
ШД
ГУ
ГМ
МОС
53
54. Развертка индукторно-реактивного ШД
m=3t
3
1ф
t=
2ф
2 t
3
2
m
2
ш =
mZ
3ф
э =
2
2
Много-пакетный ШД
1П
2П
m1
m1
П =
2
mk
m = km1
54
55. Управление шаговым двигателем
Системы управления ШДВ
Н
m
Y
m
ШД
K
Коммутатор на базе регистра сдвига
ТГ
1Ф
+/- RG 1
1Ф
УМ1
ДШ
В
Н
1
t
C
m=6
6Ф
12
n=12
6Ф
УМ6
55
56. Коммутатор фаз ШД на основе двоичного счетчика
ДШ2+/C
СТ
1
2
4
8
1
2
4
8
СТ 1
+/2
4
C
8
6Ф
ДШ1
РГ 1
2
3
4
5
6
7
8
9
10
11
12
1Ф
Таблица информации
в пзу
1
2
4
8
ROM
0
1
2
3
4
5
1
к
Адрес
данные
0000
000011
0001
000111
0002
000110
УМ1-6
56
6
57. Система управления четырехфазным ШД
5758. Конструкция аксиально-плунжерного гидромотора
5859. Конструкция аксиально-плунжерного гидромотора
5960. Гидрокинематическая схема ГУ
6061. Сопряжение устройства ЧПУ со следящим электроприводом подачи
РОКЭП
УЧПУ
Выч
УССП
СУЭП
ТП
Д
ЛДП
ТГ
ВТ
ИПП
61
62. Функциональная схема импульсно-следящей системы
Интерполятор+ CT
-
ЭП
ИПП
БС1
В
УС
А
БС2
1
А
1
Н
+ СТ
САУ
ЭП
ТГ
Н
Б
f0
А
Б
Д
СФИН
В
sin
cos
Y1
ИПП
Y2
Б
УУСП
ЭП
62
63. Схема блока синхронизации
fи Вп1
S
R
2
Q
S
R
3
1
4
5
&
S
вых
t
R
+
f0А
f0Б
t
f0А
f0Б
fи Вп
Q1
Q2
Q4
вых
63
64. ЦАП для преобразования смещенного кода
UвыхUЭ
N
0..0
10..0
1..1
-UЭ
-UЭ
RСМ
Uэ
R-2R
Uэ
......
2 R
n
2 R
UЦАП
1 0 0 ...... 0
Разряды
счетчика
64
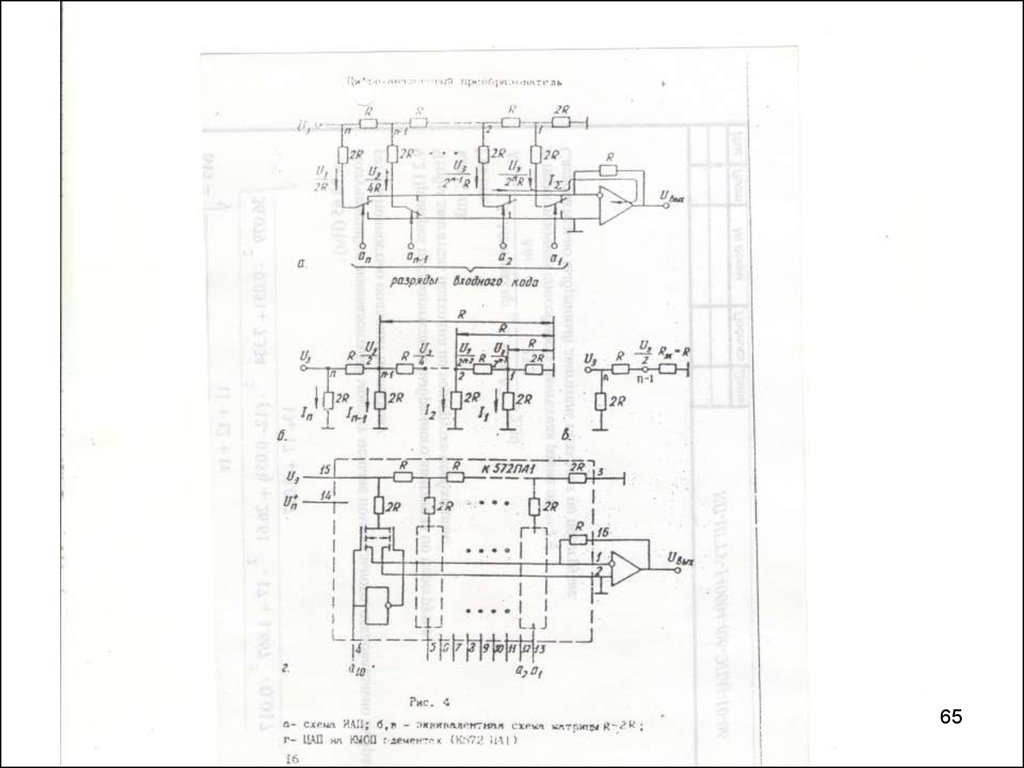
65.
6566. Линейные фотоэлектрические преобразователи перемещений
6667. Электронный маховичёк
6768. Круговые фотоэлектрические преобразователи перемещений
6869. Сильфонная муфта для кругового энкодера
6970. Функциональная схема импульсно-фазовой следящей системы ЧПУ
7071. Блок синхронизации, сложения, вычитания
И1&
f0A
f0В
БС1
f0Н
БС2
f0Б
ИЛИ1
1
ИЛИ2
И2
&
1
f0А fИ
Q
С
Q
71
72. Элементы функциональной схемы ИФСС
Диаграмма работы БЗДПf0A
200
50
100
150
200
50
100
Схема ФИОС
Q1
Q2
&
На входе Ф1
На выходе Ф1
Ф1
Ф2
На входе Ф2
На выходе Ф2
fc = 500Гц
Диаграмма ФД
Характеристика ФД
f хS
U
уп
f xR
0
f вых Q
f вых
Q-
180
-100
360
100
j
N
Q
-1 мм
Q
U уп
+1 мм
D
Рабочая зона
72
73. Элементы функциональной схемы ИФСС
Диаграмма БКСОХарактеристики каналов скорости и пути
fиВ
Uус
Uуп
8-10В
fБКСО
80мкс
15В
Uус
125мкс
80 15
1-2,5В
f
8кГц
9В
D
1
125
Структура БС
Диаграмма перемещения по оси X
X
XOC - с каналом скорости
+15В
Q
БКСО Наз.
Q
БКСО Вп.
XOC - без канала скорости
t
-15В
73
74. Структура следящего электропривода
XЗКРП
K
P
lу
kП
2 2
T0 p 2 T0 p + 1
1
2
2
T0 p 2 T0 p + 1
lp
iC
S
2
1
X
P
S
k = k рп k п i c
2
74
75. Структурная схема УЧПУ 2С42-65
7576. Схема расширителя канала
выбор страниц первого банкапамяти
РС177772
ТГ
D
А16
DC
0
SC
1
ТГ
D
А17
2
3
РС177770
А18
А19
выбор страниц шестого банка
памяти
канал
микроЭВМ
A
B
C
К583АП26
4
A
A
0
4
B
C
B
C
1
УВ
ВК
76
77. Цикл передачи информации пассивному приёмнику данных
Структура приёмникаШДА
ШУ
РД
A
DC
вывод
D
запись
ВК
&
D ТТQ
СИП
Dt
ВУ
С
СИА
R
77
78. Цикл обращения к каналу при чтении данных
7879. Ввод адреса вектора прерывания
запрос прерыванияЦП
предоставление
прерывания
ПУ ПУ
1
2
«ввод», «ШУ»,
«СИП»
ПП
Р
ЗПР
ШД
А
РС
6
разрешен
р
S
ие
7р РС ЦП
ЗПР
Dt
&
заявк
S
а
7
р
ввод
СИП
&
Ф
А
В
П
АВП
ППР
СИП
ДА
АВП
R
79
80. Субблок станочной магистрали
каналмикроЭВМ
MD00
РД
РД
ДША
MD15
станочная
магистраль
данных
вывод
привод
АЦП
датчики
А00
выбор устройства
(блока)
выбор субблока
А04
80
81. Блок входных сигналов
8182. Блок выходных сигналов
Uн=24В, I=0,2А82
83. Схема дешифратора адреса
8384. Построение ЦАП
SB449+12В
40К
20К
10К
2,5K
5К
1,25K
R
10
RG
ВК
А01
А04
привод
150
24K
R
0
З/О
13
0/1
15
-12В
DA
-12В/0В
1/0
З/О
ВК RG
84
85. Блок управления приводом с применением интегрального ЦАП и мультиплексного режима
8586. Функциональная схема сопряжения следящего электропривода с микропроцессорной системой 2С42‑45
Функциональная схема сопряжения следящего электроприводас микропроцессорной системой 2С42-45
1
Хпр
Крп=1–7
2
SB449
#/A
комплектный ЭП
САУ ЭП
S
ТП
ШД
=0,001 Х
ос
ТГ
6
L = 1;2;
1
2
программная часть
«Электроники МС1201»
5
SB449
ОИ
iд
Редуктор
sin ct
ИС 2,5кГц
ДП
4
cos ct
запитка
датчиков
обратной
связи
3
ОС 2,5кГц
fнаполнения=2,5МГц
c=2 2500
86
87. Функциональная схема блока запитки ВТ
SB453G
2,5кГц
x3
станок
SB455
ВТ
FSIN
SB457
(ОИ)
ИС
FCOS
Fоп
2,5МГ
ц
ОС
fнаполнения
87
88. Схема формирователя синуса
УМUmsin ct
«A»
ПФ
L
Lос
-20
АФ+УМ
+20
2,5кГц
-Lаф
88
89. Формирователь сигнала косинус
Uос«A»
Umsin ct
Uос
Uвых
iос
Uвх
i1
U+
УМ
Uвых
U+
«Ф»
iос
i1
Uвх
Uвых = U Uос
89
90. Формирователь опорного сигнала
U1&
U3
U2
Ф
компаратор
Uвх
формирователь импульса
Uк
U1
U2
U3
90
91. Принцип определения дробной части поворота фазы
150
15
0
9 9 9 9 9 9 9
число мм или
число полных
оборотов фазы
Структура данных оцифровки
дробная часть перемещения в мм
или дробная часть поворота фазы
UMsin t
ОС
2.5кГц
KTUMsin( t-j)
ИО - импульс оборота.
ИЗ - импульс записи.
ИС - импульс сброса.
Частота 1.25кГц.
j
fНАП
2.5МГц
Интервал оцифровки
:2
Интервал управления
ИО
ИЗ
ИС
91
92. Схема субблока оцифрвки
9293. Формирователь импульсов счета дробной части оборота фазы
9394. Формирователь импульсов измерительного сигнала
А1A2
ПФ1
Полосовой фильтр
+20
ПФ2
&
ПФ3
Коммутатор
Формирователь
импульсов
-20
2.5кГц
94
95. Синхронизация сигналов импульсами частоты наполнения
Схема синхронизацииДиаграмма работы
400Нс
+UП
+UП
fНАП
S
S
D
ОC
D
Q1
C
C
R
R
ОС
Q2
150Нс
Q1
ОИ
Q2
fНАП
fНАП
fНАП
fНАП
Опорный импульс
95
96. Диаграмма формирование импульсов счета
400мксОИ
:2ОИ
400Нс
Оцифровка
:2ОИ - используется в
схеме формирования
оборотов, записи, сброса.
Управление
j
ИИ
.....
.....
ИО
ИЗ
ИС
96
97. Формирование импульсов оборота, записи, сброса
:2ОИDt
Dt
&
ИО
&
ИЗ
&
ИС
Схема задержки
и формирования
Dt
Структурная схема
+UП
Диаграмма
&
:2ОИ
U2
U3
U1
Задержка
150Нс
ИО
Формирование сигнала
:2ОИ
ИЗ
ИС
2мкс
U1
U2
U3
ИО
97
ИО
98. Узел определения направления вращения и выявления полного оборота фазы
ИОр10
+
10-1
СТ 1
R
2
4
8
-2
ИС
4
D
1
2
4
8
C
ИЗ
Текущая ситуация
0+1+2
D DC
4
1
2
4
7+8+9
8
0+1+2
RG Q 4 D DC
1
2
4
7+8+9
8
&
+ИО
&
-ИО
Предыдущая
ситуация
(8 9 )
8
1
2
4
100
101
+ СТ +р
+ СТ +р
-р
-р
......
-
-
Сбой1
+ИО
7 8 9 0 1 2 3 4 5 6 7 8 9 0
&
7+8+9
7 (8 9) = 7 8 9
&
-ИО
2
4
8
1
4
8
2
&
&
&
0+1+2
( 0 1) 2 = 0 1 2
Сбой2
Сбой1.
Было 0.999, стало 1.300.
Разность 0.301 мм. - пройденный путь на
интервале оцифровки.
=
0.301 10 3
800 10 6
60 = 22м / мин.
98
99. Привязка результата оцифровки и линейному масштабу
Дiс
iд
N
L
кд
ВT
ХВ
S = 1об ХВ i c i д p k у L
99
100. Принцип оцифровки в системах ЧПУ «Уникон-30»
ДиаграммаСхема устройства
8МГц
G
C
:4000
CT Q
(Q3 -Q11)
12
9
A ROM D
10
sin
2кГц
УМ
ВТ
9
A ROM D
10
cos
499
0
УМ
0
j
Up
ДУ
К
Ф
Uc
3999
Nсч
0
(Q0 -Q11)
12
WR RQ D
D
12
ШФ
ШД
Uду
‘зап’
NRQ
100