






































 Электроника
ЭлектроникаПохожие презентации:




")





Радионавигационный план Российской Федерации
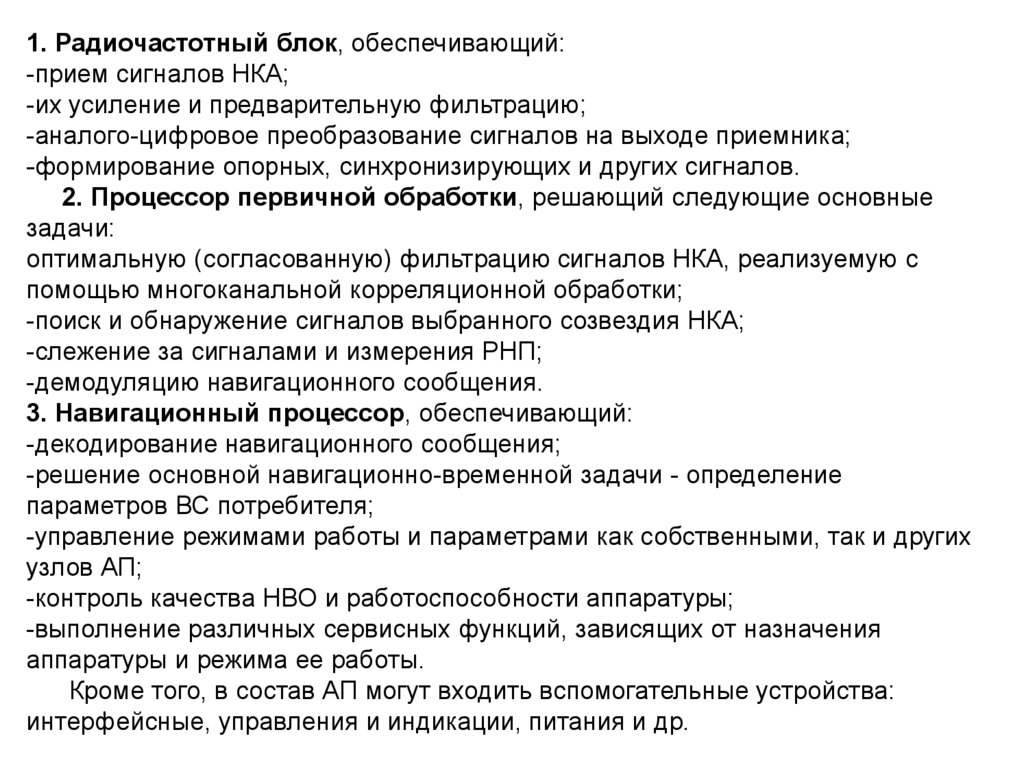
1.
Радионавигационный план Российской Федерации (утв. приказом Министерствапромышленности и торговли РФ от 2 сентября 2008 г. N 118 в редакции приказа
Министерства промышленности и торговли РФ от 31 августа 2011 г. N 1177)
Цели радионавигационного плана Российской Федерации :
- повышение экономической эффективности и безопасности всех групп
потребителей
при
использовании
имеющихся
и
перспективных
радионавигационных систем и средств наземного и космического базирования
Российской Федерации, а также объединенных международных систем в
интересах
решения
социально-экономических
задач
и
обеспечения
национальной безопасности;
- обеспечение взаимодействия между федеральными органами исполнительной
власти, предприятиями промышленности, научными организациями и
учреждениями,
осуществляющими
разработку,
производство
радионавигационных систем и средств, их эксплуатацию и предоставляющими
услуги в области радионавигации в целях гарантированного предоставления
потребителям необходимой навигационно-временной информации, качество
которой должно соответствовать мировому уровню.
2.
Область применения радионавигационного плана Российской Федерации :- радионавигационные системы и средства гражданского и двойного применения,
находящиеся в ведении различных федеральных органов исполнительной власти. План не
включает в себя радиотехнические системы, которые выполняют
радиолокационно-обзорные или связные функции. В частности, он не включает
автоматические идентификационные системы (АИС) и системы автоматического
зависимого наблюдения (АЗН), но включает навигационные средства, на которые
опираются упомянутые системы.
Радионавигационные системы, рассматриваемые в Плане, подразделяются на
следующие группы:
Глобальные космические (спутниковые) радионавигационные системы
ГЛОНАСС с функциональными дополнениями, Цикада-М.
2. Наземные радионавигационные системы:
Системы дальней навигации "Альфа" ("Маршрут"), "Чайка" ("Тропик-2С",
"Тропик-2В", "Тропик-2Е", "Тропик-2П", "Скорпион"), "Марс-75".
Системы ближней навигации Брас-3, РС-10, Спрут, ГРАС (ГРАС-2), Крабик-Б
(Крабик-БМ), РСБН-4Н (8Н), ПРС, РМА-90, РМД-90, DVOR-2000, DME-2000.
Системы посадки СП-75 (80, 90, 200), ПРМГ-5 (76У), МЛС, СП типа GBAS (диф.
режим ГЛОНАСС).
В Плане изложены: - задачи, решаемые с использованием радионавигационных систем;
- требования всех групп потребителей к радионавигационным системам; - основные характеристики
эксплуатируемых и перспективных радионавигационных систем;
- основные направления повышения эффективности использования существующих радионавигационных
систем, их развития и совершенствования;
- направления интегрирования различных радионавигационных систем;
- основные направления международного сотрудничества в области радионавигационных систем.
3.
Общесистемные требования Основными требованиями потребителей к радионавигационным системамявляются: - требования к размеру рабочей зоны РНС; - требования к точности определения
местоположения и синхронизации шкал времени объектов; - требования к доступности РНС; - требования
к целостности РНС; - требования к непрерывности обслуживания (функционированию) РНС;
- требования к дискретности определения местоположения; - требования к пропускной способности РНС.
Требования к размерам рабочей зоны. Рабочая зона (зона действия) - область пространства Земного
шара (замкнутая поверхность), в пределах которой навигационная система позволяет потребителю
определять местоположение, скорость и время с заданными характеристиками. т.е. требования
глобальной рабочей зоны.
Требования к точности местоопределения. Точность местоопределения - это степень соответствия
местоположения потребителя, определенного в данный момент времени с помощью навигационной
системы, истинному положению. Точность местоположения характеризуется допустимой величиной
отклонения измеренных (обсервованных) координат от истинных. Количественной мерой точности
является абсолютное значение разности между определенными и истинными значениями координат или
среднеквадратическая погрешность - СКП.
Требования к точности местоопределения объектов зависят от характера задач, решаемых
потребителями. Численные значения точности местоопределения изменяются в широких пределах от
долей метра до нескольких километров.
Требования к точности определения времени (синхронизации). Точность определения
(синхронизации) времени характеризуется величиной отклонения скорректированной по данным РНС
шкалы времени объекта от принятой в качестве эталонной. Требования к точности зависят от характера
задач, решаемых потребителями. Численные значения точности (СКП) изменяются в широких пределах
от секунд до наносекунд.
Требования к доступности РНС. Доступность (эксплуатационная готовность) - это способность
радионавигационной системы обеспечить проведение навигационных определений в заданный момент
времени в определенной зоне действия. Доступность радионавигационной системы характеризуется
вероятностью получения потребителем в рабочей зоне достоверной навигационно-временной
информации в определенный период времени и с требуемой точностью. Требования к доступности
изменяются в зависимости от используемых транспортных средств и задач, решаемых потребителями.
4.
Исходя из обеспечения безопасности полетов самолетов и плавания морских и речных судов, наиболеевысокие требования, при которых доступность должна равняться практически единице, предъявляются
воздушными потребителями при заходе на посадку и посадке по категориям ИКАО, морскими и речными
потребителями – при маневрировании в портах и движении по внутренним водным путям.
Требования к целостности РНС. Целостность РНС - это способность РНС выдавать потребителю
своевременное и достоверное предупреждение в тех случаях, когда какие-либо сигналы нельзя
использовать по целевому назначению в полном объеме. Характеризуется соответствующей
вероятностью. Требования к целостности РНС морских, речных и наземных потребителей более низкие,
чем воздушных потребителей, из-за меньших скоростей движения и больших интервалов обновления
информации.
Требования к непрерывности обслуживания (функционирования) РНС. Непрерывность обслуживания
(функционирования) - это способность навигационной системы обеспечивать навигационное
обслуживание потребителей в течение заданного временного интервала без отказов и перерывов.
Характеризуется вероятностью.
Требования
к
дискретности
определения
местоположения.
Дискретность
определения
местоположения характеризуется временным интервалом, через который возможно новое определение
местоположения с использованием одного и того же типа РНС. Для ГНСС (как и для ряда других РНС)
требования не предъявляются.
Требования к пропускной способности РНС. Пропускная способность характеризуется количеством
пользователей радионавигационной системы, которые могут обслуживаться одновременно. Учитывая
важное значение своевременного получения навигационной информации для обеспечения безопасного
плавания и полетов, пропускная способность РНС должна быть неограниченной, а непрерывность, т.е.
надежность обслуживания, должна соответствовать заданной величине.
5.
Радионавигационные системыРНС –это совокупность устройств, предназначенных для управления движением объектов
из одной точки пространства в другую по оптимальной в заданных условиях траектории.
Для этого нужно знать текущее положение, направление и скорость движения объекта
навигации.
Известны следующие методы определения местоположения объектов навигации (ОН):
Метод счисления пути, позиционный метод и обзорно-сравнительный метод.
Метод счисления пути основан на интегрировании по времени измеренного вектора
скорости ОН относительно поверхности Земли. В качестве датчика применяют
доплеровский измеритель скорости (ДИС) – доплеровская навигационная система.
Радионавигационные параметры: дальность, радиальная скорость, угловая координата. РП
измеряются относительно радионавигационных точек (РНТ), координаты которых известны с
высокой точностью. Если РНТ движутся, то координаты – функции времени.
Определение координат производится в системе координат (цилиндрической, сферической
или иной).
Используются географическая и геоцентрическая системы координат. В географической СК
Г Ш – угол между плоскостью экватора и отвесной линией. ГД – двугранный угол между
плоскостями Гринвичского меридиана и местного меридиана, проходящего через проекцию
ОН на земную поверхность. В геоцентрической СК ГД определяется также, Г Ш, как угол
между плоскостью экватора и линией ОН – центр Земли. Т.е. Земля считается шаром.
Геометрическое место точек равных значений навигационных параметров – есть
поверхность положения. Линия положения. Местоположение (МП) объекта навигации
определяется по центру его массы.
Радионавигационные элементы (РНЭ) – геометрические или механические величины,
характеризующие МП или перемещение объекта навигации.
6.
Классификация РНСпо способу определения местоположения:
угломерные;
дальномерные;
Разностно-дальномерные;
комбинированные.
по виду несущего информацию и измеряемого параметра радиосигнала.
Decca Navigator Mk 12
Decca (Декка) — гиперболическая радионавигационная система, работавшая
в СДВ диапазоне, впервые была развёрнута во время Второй мировой войны,
когда войска союзников нуждались в системе позволяющей достигнуть
точных посадок. (Как и Loran C её основным назначением стала навигация в
прибрежных водах). После войны система была развёрнута в Северном море
и использовалась до 2000 г. вертолётами, работающими на нефтяных
платформах.
7.
Консоль (Consol) — общее название типа радионавигационной системы дляориентации на море и в воздухе. Эта РНС состоит из нескольких радиостанций
(радиомаяков f=250-350 кГц, ширина луча станции 10-15°) с вращающейся
диаграммой направленности излучения.
Передатчик, равномерно вращающимся лучом с помощью азбуки Морзе передаёт
свои позывные (или просто точки). Период вращения ~1 минута. В момент
прохождения лучом направления север-юг передатчик излучает ненаправленный
(круговой) сигнал. Наблюдатель, желающий определить своё местоположение,
используя радиоприёмник и секундомер может по времени между приёмом
направленного и ненаправленного сигналов определить свой азимут со стороны
радиостанции. Точно так же, определив азимут от другой радиостанции системы,
наблюдатель уже может, зная координаты этих станций, нарисовать на карте
схему, по которой можно определить своё местоположение. Если наблюдатель
способен принять сигналы 3 и более станций системы, то это увеличивало
точность определения и устраняло возможные ошибки.
Достоинством системы является простота навигационного оборудования:
секундомер, приёмник, карта и табличка с данными о станциях.
Недостаток: длительность определения координат, малая точность (1—2°
координат на расстояниях порядка 1600 км).
8.
Импульсно-фазоваяразностно-дальномерная
система
Loran-C
работает на частоте 100 кГц. На этих частотах поглощение радиоволн в
ионосфере может быть значительным, особенно при больших углах
падения. Система Loran-C относится к классу гиперболических систем,
хотя и основана на измерении не фазы, а задержки импульсов,
принимаемых от цепочки передающих станций. В каждой цепочке одна
из станций является ведущей, а остальные — ведомые. Все они точно
синхронизируются. Приемник измеряет время прихода импульсов с
точностью 0,1 мкс, местоположение может определяться с точностью
150 м на расстояниях до 1500 км (на море). В общем случае сигнал
представляет собой сумму основной волны и сигналов, отраженных
один или несколько раз от ионосферы. На расстояниях свыше 2000 км
ионосферная волна преобладает и точность будет зависеть от
состояния ионосферы. Испытания показали, что в отдельных случаях
могут возникнуть ошибки в несколько километров. Таким образом, даже
при идеальных условиях система Loran-C не будет иметь точность,
которую обеспечивают спутниковые системы NAVSTAR (GPS) и
ГЛОНАСС.
Импульсно-фазовая радионавигационная система «Чайка» —
российский аналог американской системы Loran-C. Система была
разработана в 1958 г. по заказу ВВС СССР.
9.
Transit — первая спутниковая система навигации. Началаразрабатываться уже в 1958 году в США.В 1959 году на орбиту
выведен первый навигационный искусственный спутник Земли, а
в 1964 году вступила в эксплуатацию система для обеспечения
американских атомных ракетных подводных лодок «Поларис».
Для коммерческого использования эта система была
предоставлена в 1967 г., причем число гражданских
потребителей вскоре существенно превысило число военных. К
концу 1975 г. на круговых околоземных (высота около 1000 км)
орбитах находилось 6 НКА.[1] Координаты потребителя
рассчитывались на основе приема и выделения доплеровского
сдвига частоты передатчика одного из 6-7 навигационных
космических аппаратов. При этом последний находился в поле
видимости в течение примерно 40 мин., что позволяло получить
достаточно высокую точность определения координат для
медленно движущихся и стационарных объектов (единицы
метров при геодезических работах). Масса НКА — 56 кг. Рабочие
частоты 400 и 150 МГц. К настоящему времени система
используется лишь для проведения исследований ионосферы.
10.
Циклон (навигационная система)Цикло́н — первая спутниковая навигационная система в СССР.
В её состав входили три аппаратных комплекса: «Цунами-АМ»
на искусственных спутниках Земли, «Цунами-БМ» (P-790) на
кораблях и «Цунами-ВМ» на береговых объектах.
Первые спутники системы, Космос-192 и Космос-220, были
запущены в 1967 и 1968 г. Всего было шесть космических
аппаратов «Парус», обращающихся на околополярных орбитах
высотой 1000 км.
Координаты определялись с точностью до 80—100 метров.
Выяснилось, что основной вклад в погрешность навигационных
определений вносят погрешности передаваемых спутникам
собственных
эфемерид,
которые
рассчитываются
и
закладываются на борт КА средствами наземного комплекса
управления (НКУ).
Точность определения координат системой «Циклон» значительно уступает
характеристикам более современных систем навигации NAVSTAR и ГЛОНАСС.
11.
12.
Пересечение двух поверхностей положения определяет линию положения –геометрическое место точек пространства, имеющих неизменяющиеся
значения двух навигационных параметров. Таким образом местоположение
объекта определяется координатами точки пересечения трех поверхностей
положения или двух линий положения. Из-за нелинейности две линии
положения могут пересекаться в двух различных точках. Неоднозначность
местоположения можно устранить использованием
дополнительных
поверхностей положения.
13.
Системы глобального позиционированияСпутниковые радионавигационные системы
Назначение спутниковых систем. Спутниковые радионавигационные
системы — комплексные радиоэлектронные системы (СРНС), состоящие из
совокупности наземного и космического оборудования, предназначенные для
определения местоположения (географических координат и высоты), точного
времени и параметров движения (скорости и направления движения и т. д.)
наземных, водных и воздушных объектов. СРНС выполняют свои функции в
любой точке планеты, что характеризует их как глобальные системы. Важным
качеством СРНС является их автономность и беззапросный режим
функционирования.
Использование псевдослучайных сигналов придает им высокую
помехозащищённость и надёжность при небольшой мощности излучения
передатчиков.
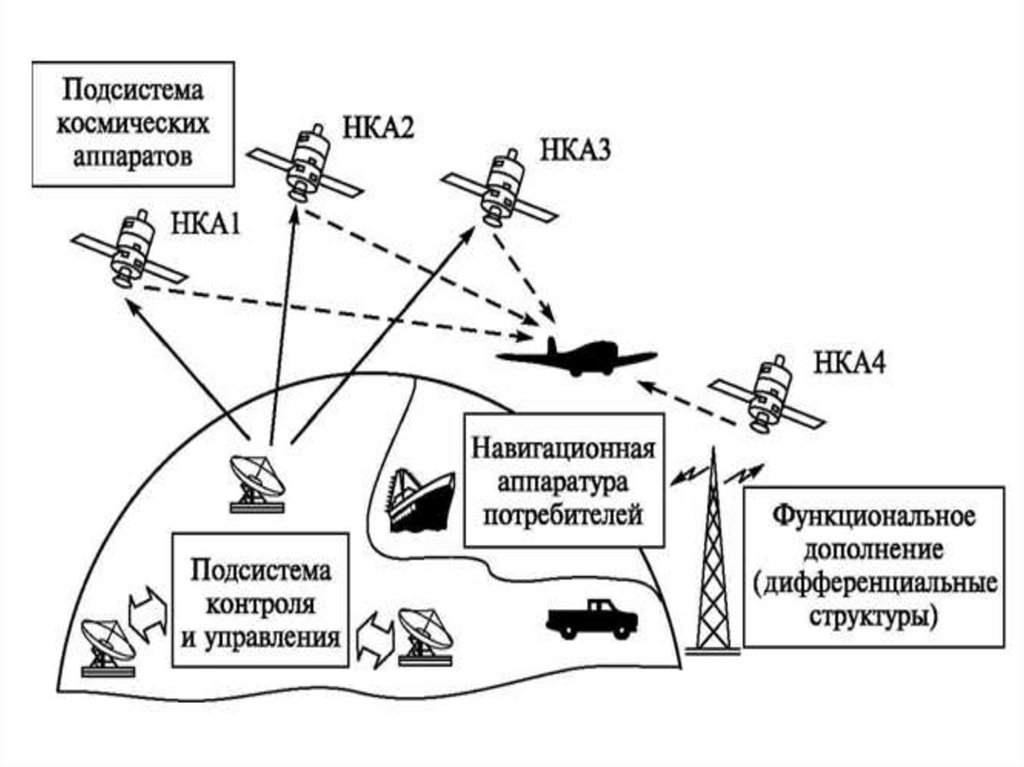
Навигационные системы NAVSTAR GPS и ГЛОНАСС состоят из трёх
подсистем:
- подсистемы космических аппаратов;
- подсистемы контроля и управления;
- навигационной аппаратуры потребителей.
14.
15.
16.
Всемирное координированное время (Universal Coordinated Time - UTC).Эта система базируется на «атомной» секунде, ее сигналы передаются по радио,
в составе телевизионных сигналов, в сетях Интернет. Шкала времени UTC
периодически корректируется на 1 с таким образом, чтобы ее рассогласование
со шкалой UT не превышало 0,9 с. Коррекцию шкалы UTC на величину ±1 с, при
которой происходит «секундный скачок» (leap second), производит
международное бюро времени по рекомендациям Международной службы
вращения Земли. Коррекция UTC, как правило, производится один раз в год в
полночь с 31 декабря на 1 января, или с 31 марта на 1 апреля, или с 30 июня на
1 июля, или с 30 сентября на 1 октября.
Контролируемое расхождение между шкалой системного времени ГЛОНАСС и
Государственным эталоном UTC (SU) не превышает 1 мс, а погрешность
привязки - не более 1 мкс. Кроме того, из-за особенностей функционирования
наземного комплекса управления между шкалами ГЛОНАСС и UTC (SU)
существует постоянный сдвиг, равный 3 ч 00 мин.
Шкала времени GPS привязана к UTC. Начало отсчета времени установлено в
полночь с 5 на 6 января 1980 г. Неделя состоит из 604 800 с. Отсчет времени в
GPS отличается от UTC на целое число секунд. В результате между ними
существует некоторое постоянно растущее расхождение, в настоящее время
составляющее 14 с. Передаваемые с НКА навигационные данные содержат
информацию о расхождениях шкал времени:
- накопленное расхождение в целых секундах между GPS и UTC;
- данные для вычисления текущих поправок к БШВ НКА. Погрешность
алгоритмической привязки шкалы времени GPS к UTC < 90 не (СКО).
17.
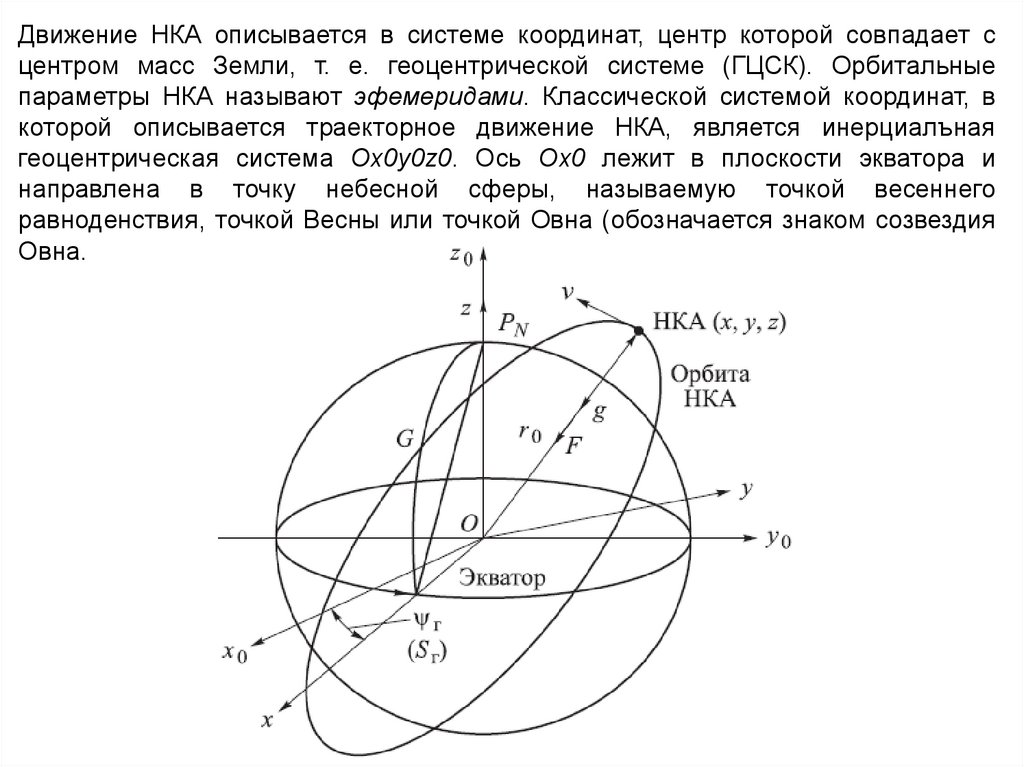
Движение НКА описывается в системе координат, центр которой совпадает сцентром масс Земли, т. е. геоцентрической системе (ГЦСК). Орбитальные
параметры НКА называют эфемеридами. Классической системой координат, в
которой описывается траекторное движение НКА, является инерциалъная
геоцентрическая система Ox0y0z0. Ось Ox0 лежит в плоскости экватора и
направлена в точку небесной сферы, называемую точкой весеннего
равноденствия, точкой Весны или точкой Овна (обозначается знаком созвездия
Овна.
18.
Ось Oz0 направлена вдоль оси вращения Земли в сторону Северногополюса, а ось Oy0 дополняет систему координат до правой.
Однако для потребителя более удобным является описание движения НКА
в геоцентрической подвижной (неинерциальной) системе координат Oxyz ,
учитывающей суточное вращение Земли. Центр этой системы также совпадает
с центром масс Земли, ось Oz совпадает с осью Oz0 . Ось Ox лежит в
плоскости экватора и проходит через Гринвичский меридиан, ось Oy дополняет
систему координат до правой.
Для передачи потребителю наземный сегмент управления формирует
информацию о движении НКА в геоцентрической подвижной системе
координат ОXYZ. В навигационной системе координат ГЛОНАСС ее называют
ПЗ-90. Эта система так же, как и аналогичная принятая в СРНС GPS система
координат WGS-84, относится к декартовым системам типа ECEF (Earth centered Earth - fixed).
Плоскость Oxz определяет на поверхности Земли линию сечения, от которой
отсчитывается долгота. В процессе вращения Земли ось Ox периодически
совмещается с осью Ox0 . Интервал между двумя такими последовательными
моментами соответствует одним звездным суткам. Угол между осями Ox0 и Ox
соответствует гринвичскому звездному времени и рассчитывается с учетом
звездной даты и времени на Гринвичском меридиане. Информация о движении
НКА в геоцентрической подвижной системе координат формируется на НКУ, а
затем передается в составе навигационного сообщения.
19.
Основные понятия и определенияАстрономические и неастрономические величины отсчета времени.
Сутки = 86400 сек (соответствуют полному обороту Земли вокруг оси
вращения) и зависят от положения наблюдателя, времени года.
Звездные сутки – интервал между верхними кульминациями точки весеннего
равноденствия.
UT - Universal Time (SU) - шкала времени Государственного эталона частоты и
времени России не является непрерывной шкалой вследствие её
периодической секундной коррекции.
UTC - Universal Time Coordinated - всемирное координированное время.
Международная система высокоточного определения среднего времени по
гринвичскому меридиану, учитывающая сезонные изменения скорости
вращения Земли.
UTM (Universal Transverse Mercator) - универсальная поперечная проекция
Меркатора (картографическая). В России и странах СНГ применяется ее
частный случай – проекция Гаусса-Крюгера.
20.
Исторически возникшая в астрономии шкала всемирного времени задаетсявращением Земли. Начиная с 1884 года, среднее солнечное время на меридиане
Гринвича называется всемирным временем UT (Universal Time). Период вращения
Земли вокруг собственной оси – величина не постоянная. Под воздействием
лунных и солнечных приливов она постоянно увеличивается на несколько
миллисекунд за 100 лет.
Системное время GPS есть Всемирное координированное время UTC, отнесённое
к началу 1980 года: TGPS = UTC(1980.0). Поправки TGPS к Всемирному
координированному времени UTC регистрируются с высокой точностью и
передаются в виде постоянной величины в навигационном сообщении, а также
публикуются в специальных бюллетенях.
Системное время ГЛОНАСС периодически подстраивается под всемирное
координированное время, и время ГЛОНАСС = UTC.
В бортовую шкалу времени спутников вводится пересчётный коэффициент,
зависящий от высоты орбиты и учитывающий релятивистские эффекты (движение
спутника относительно наземных часов; разность гравитационных потенциалов на
орбите и на поверхности Земли). Так, для системы ГЛОНАСС он не превышает
4,36×10-10 (релятивистская поправка на 37,7 мкс в сутки).
В 1967 году было дано определение атомной секунды: «Продолжительность 9 192
631 770 колебаний излучения, соответствующего резонансной частоте перехода
между двумя уровнями сверхтонкой структуры основного состояния атома цезия133, при отсутствии возмущений от внешних полей».
Появление молекулярных и атомных стандартов частоты привело к созданию
сверхточной шкалы времени - шкалы международного атомного времени TAI (Time
Atomic International).
21.
Основной шкалой времени является системная, поскольку она оказывает влияние на синхронизациювсех подсистем. Для её формирования используются наиболее точные эталоны времени и частоты
(водородные часы) с суточной нестабильность 5∙10-14с, расположенные в наземных командноизмерительных станциях.
Системное время GPS есть Всемирное координированное время UTC, отнесённое к началу 1980 года.
Поправки TGPS к Всемирному координированному времени UTC регистрируются с высокой точностью и
передаютя в виде постоянной величины в навигационном сообщении, а также публикуются в
специальных бюллетенях. Системное время ГЛОНАСС периодически подстраивается под всемирное
координированное время.
Системная шкала времени ГЛОНАСС привязана к Госэталону Координированного всемирного времени
UTC (SU) с учетом постоянного сдвига на целое число часов: tГЛОНАСС= UTC (SU) + 3 ч. 00 мин. Таким
образом, время системы ГЛОНАСС является московским временем.
Бортовая шкала времени спутника, к которой привязываются соответствующие навигационные сигналы,
формируется бортовыми эталонами времени и частоты (цезиевые часы) с суточной нестабильность 5∙1013 с. Они работают в менее благоприятных условиях, поэтому неизбежно их расхождение с системной
шкалой времени. В бортовую шкалу времени спутников вводится пересчётный коэффициент, зависящий
от высоты орбиты и учитывающий релятивистские эффекты (движение спутника относительно наземных
часов; разность гравитационных потенциалов на орбите и на поверхности Земли). Так, для системы
ГЛОНАСС он соответствует 37,7 мкс в сутки.
Шкала времени потребителя наиболее нестабильна, так как для удешевления приемника потребителя
она формируется и поддерживается кварцевым генератором. Система синхронизации ГЛОНАСС
обеспечивает формирование единой системной шкалы времени, синхронизацию шкал времени всех
подсистем, расчет расхождений и частотно-временных поправок и закладку поправок на борт спутников
(дважды в сутки) для передачи их потребителям в составе навигационного сообщения.
Согласно
информации
морского
сайта
(www.seaman-sea.ru)
допускаются
следующие
среднеквадратические погрешности привязки и синхронизации:
· временной взаимной синхронизации бортовых шкал времени НКА - 20 нс;
· расхождение между шкалой системного времени ГЛОНАСС и шкалой Госэталона Координированного
всемирного времени UTC(SU) - не более 1 мс;
· погрешность привязки шкалы системного времени ГЛОНАСС к шкале UTC(SU) - не более 1 мкс;
· погрешность сверки шкалы времени НКА со шкалой времени центрального синхронизатора - не более
22.
Шкала Координированного всемирного времени UTC подвергается периодическойплановой коррекции на целое число секунд. Синхронно с этим событием один раз в
квартал производится секундная коррекция системного времени ГЛОНАСС всеми
пользователями, использующими или воспроизводящими шкалу UTC.
Программное обеспечение приемника должно включать в себя алгоритм контроля
использования скорректированного времени UTC, который вводится в действие за
секунду до события коррекции. Если момент излучения сигнала спутника и момент
приема этого сигнала находятся в разных системах отсчета (до и после коррекции),
то измеренное значение псевдодальности необходимо скорректировать поправкой,
равной значению величины коррекции UTC, умноженной на скорость света. Затем
значение псевдодальности должно быть отнесено к моменту времени,
отсчитанному по нескорректированной шкале времени.
До момента приема обновленных эфемеридных данных с текущего спутника, его
положение вычисляется по старым эфемеридам, в нескорректированной шкале
UTC. Как только со спутника поступают новые эфемериды, его положение
вычисляется по новым эфемеридам с применением скорректированного времени
UTC. Все результаты решения навигационной задачи, выполненные приемником
после момента коррекции его часов и выдаваемые через его интерфейс, должны
быть привязаны к шкале скорректированного времени UTC, согласно шкале
времени ГЛОНАСС, сформированной в приемнике.
23.
24.
25.
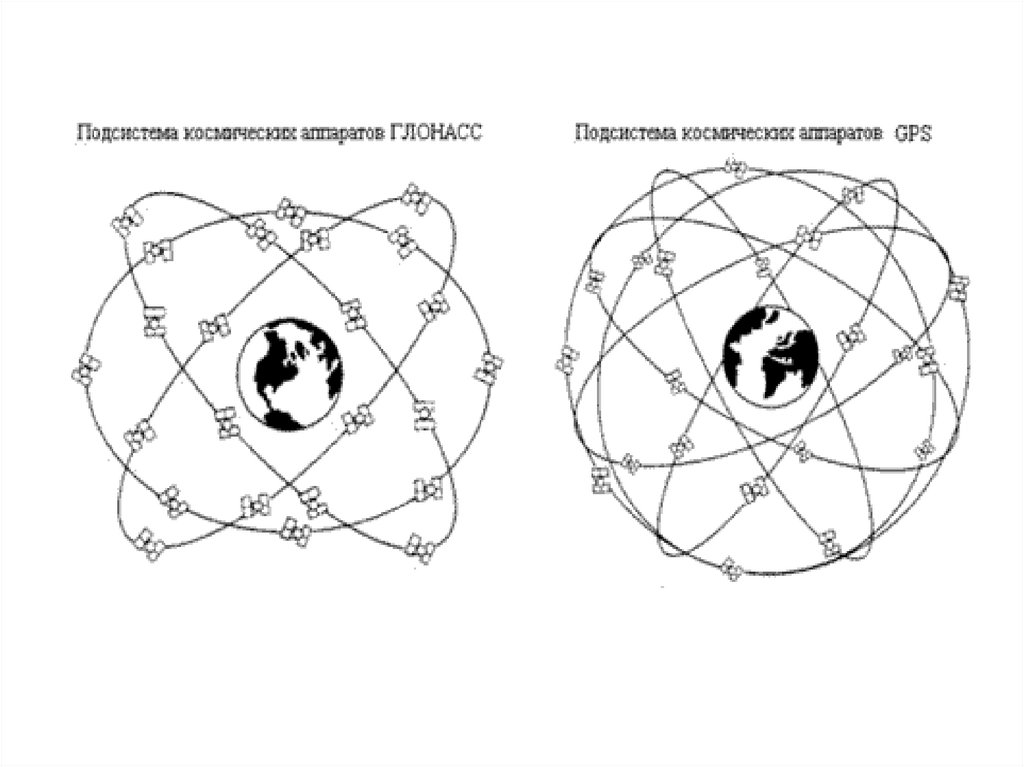
Подсистема космических аппаратов. Навигационные спутники (НС),разбитые по группам, вращаются с периодом около 12 часов в трех
орбитальных плоскостях на неизменной средневысотной орбите на
постоянном расстоянии от поверхности Земли. Этому условию удовлетворяет
орбитальная группировка из 24 спутников на близких к круговым орбитам
высотой около 20 тыс. км и наклонением орбит 55°-65°, которые образуют сеть
над поверхностью земли. Система спутников имеет избыточность, что
позволяет оптимизировать выбор в аппаратуре потребителей оптимальной
группы спутников по значениям геометрического фактора и отношению
сигнал-шум.
На
каждом
спутнике
располагаются
эталоны
времени
и
частоты - «высокоточные атомные часы», бортовой навигационный
передатчик, имеющий выходную мощность до 50 Вт, работающий в
L - диапазоне частот, антенную систему с шириной ДНА около 40 °, бортовой
управляющий комплекс, систему ориентации и стабилизации и различные
вспомогательные устройства.
26.
Для синхронизации шкал времени различных спутников с необходимойточностью используются цезиевые стандарты частоты с относительной
нестабильностью порядка 10-13. Ошибка синхронизации временных шкал
равная 10 нс вносит погрешность в навигационные измерения до 15 м.
Конструктивно спутники представляют собой герметичный контейнер
(ГЛОНАСС-М, а ГЛОНАСС-К нет герметичного контейнера), на внешней
стороне которого расположены солнечные батареи и антенные системы. Кроме
основной
аппаратуры
в
контейнере
расположены
аккумуляторы,
обеспечивающие работу на теневой стороне земли. В настоящее время
осуществляются запуски спутников Глонасс второго (индекс М) и третьего
поколения (индекс К), имеющих больший ресурс (до 12 лет), чем спутники
первого поколения.
Спутник Глонасс-М
Спутник Глонасс-К
27.
Системы координат и шкалы времени В соответствии с постановлением ПравительстваРоссийской Федерации от 28 июля 2000 г. N 568:
1. В целях геодезического обеспечения орбитальных полетов и решения навигационных
задач используется государственная геоцентрическая система координат из системы
геодезических параметров "Параметры Земли 1990 года" - уточненная версия ПЗ-90.02
(распоряжение Правительства Российской Федерации от 20 июня 2007 г. N 797-р).
За отсчетную поверхность в государственной геоцентрической системе координат из ПЗ90.02 принята поверхность эллипсоида ПЗ-90.02.
Начало координат расположено в центре масс Земли.
Ось Z направлена в Международное условное начало - Условный полюс Земли, как
определено в рекомендации Международной службы вращения Земли (IERS); ось X
направлена в точку пересечения плоскости экватора и нулевого меридиана (начального
астрономического меридиана), определенного Международным бюро времени (BIH); ось
Y дополняет геоцентрическую прямоугольную систему координат до правой.
Геодезические координаты точки в системе координат из ПЗ-90.02 относятся к
эллипсоиду, значения большой полуоси и полярного сжатия.
Геодезическая широта В точки М определяется как угол между нормалью к поверхности
эллипсоида и плоскостью экватора. Положительное направление отсчета широт – от
экватора к Северу.
Геодезическая долгота L точки М определяется как двугранный угол между плоскостью
начального меридиана и плоскостью меридиана, проходящего через точку М.
Положительное направление отсчета долгот - от нулевого меридиана к Востоку.
Геодезическая высота Н определяется как расстояние по нормали от поверхности
эллипсоида до точки М.
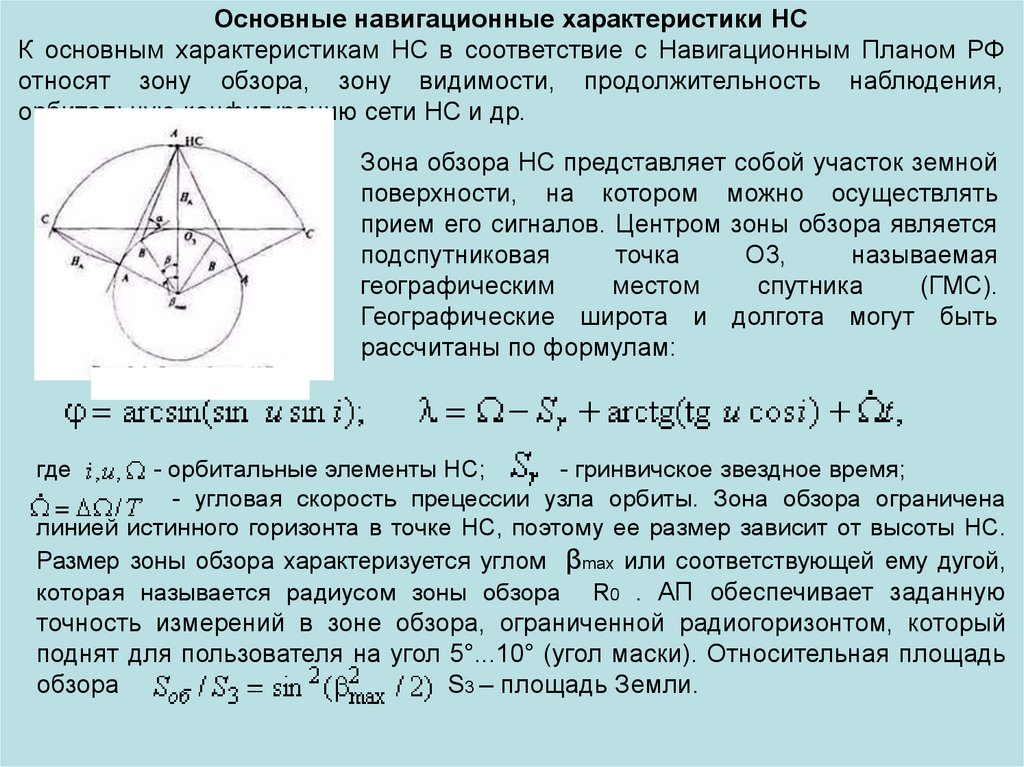
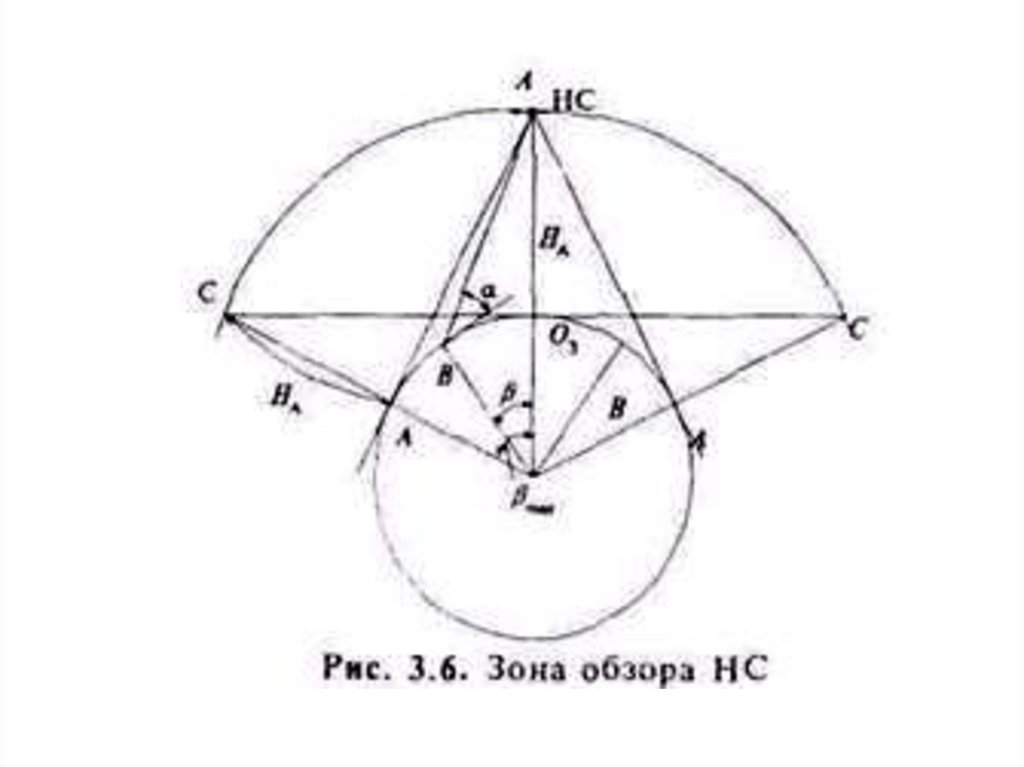
28.
Основные навигационные характеристики НСК основным характеристикам НС в соответствие с Навигационным Планом РФ
относят зону обзора, зону видимости, продолжительность наблюдения,
орбитальную конфигурацию сети НС и др.
Зона обзора НС представляет собой участок земной
поверхности, на котором можно осуществлять
прием его сигналов. Центром зоны обзора является
подспутниковая
точка
О3,
называемая
географическим
местом
спутника
(ГМС).
Географические широта и долгота могут быть
рассчитаны по формулам:
где
- орбитальные элементы НС;
- гринвичское звездное время;
- угловая скорость прецессии узла орбиты. Зона обзора ограничена
линией истинного горизонта в точке НС, поэтому ее размер зависит от высоты НС.
Размер зоны обзора характеризуется углом βmax или соответствующей ему дугой,
которая называется радиусом зоны обзора R0 . АП обеспечивает заданную
точность измерений в зоне обзора, ограниченной радиогоризонтом, который
поднят для пользователя на угол 5°...10° (угол маски). Относительная площадь
обзора
S3 – площадь Земли.
29.
30.
РЕШЕНИЕ НАВИГАЦИОННОЙ ЗАДАЧИРешить навигационную задачу значит определить элементы вектора состояния
потребителя, включающие пространственные координаты, временную поправку
шкалы времени потребителя относительно системной шкалы времени и вектор
скорости.
Измеряются такие навигационные параметры, как дальность до объекта R и
радиальная скорость сближения объектов, а соответствующие им задержка
сигнала и доплеровское смещение частоты являются радионавигационными
параметрами. Связь между ними определяется соотношениями:
R с ; V f ДОП .
P
Навигационные функции определяются видом навигационного параметра,
характером движения спутников и потребителя выбранной системой координат и
т.д. Навигационные функции для пространственных координат потребителя можно
определить дальномерным, псевдодальномерным, разностно-дальномерным,
угломерным методами и комбинациями этих методов. Функционирующие СРНС
ГЛОНАСС и GPS используют псевдодальномерный метод.
31.
Дальномерный метод навигационных определений основан на пассивных(беззапросных) измерениях дальности R между i-м навигационным спутником (НС) и
потребителем. В этом методе навигационным параметром является дальность R, а
поверхностью положения - сфера с радиусом R и центром, расположенным в центре
масс i-го спутника. Уравнение сферы
Ri xi x ( yi y )2 ( zi z )
2
1
2 2
где xi , yi , z i
- известные на момент измерения координаты i-го НС : x, y, z
координаты потребителя.
Координаты х, у, z пользователя определяются как точки пересечения трех
поверхностей положения по данным измерения сигналов от трех навигационных
спутников из системы трех уравнений. Нелинейность системы уравнений и
неоднозначность определения координат устраняются с помощью дополнительной
информации (ориентировочные координаты потребителя, его радиальная скорость
и др.). В дальномерном методе неявно подразумевается, что все измерения
соответствуют одному моменту времени. Координаты спутника привязаны к
бортовой шкале времени, а потребитель измеряет задержку сигнала в значительно
менее точной шкале времени потребителя. Это приводит к значительной
погрешности местоопределения Высокостабильные эталоны времени дороги для
использования в аппаратуре потребителей.
32.
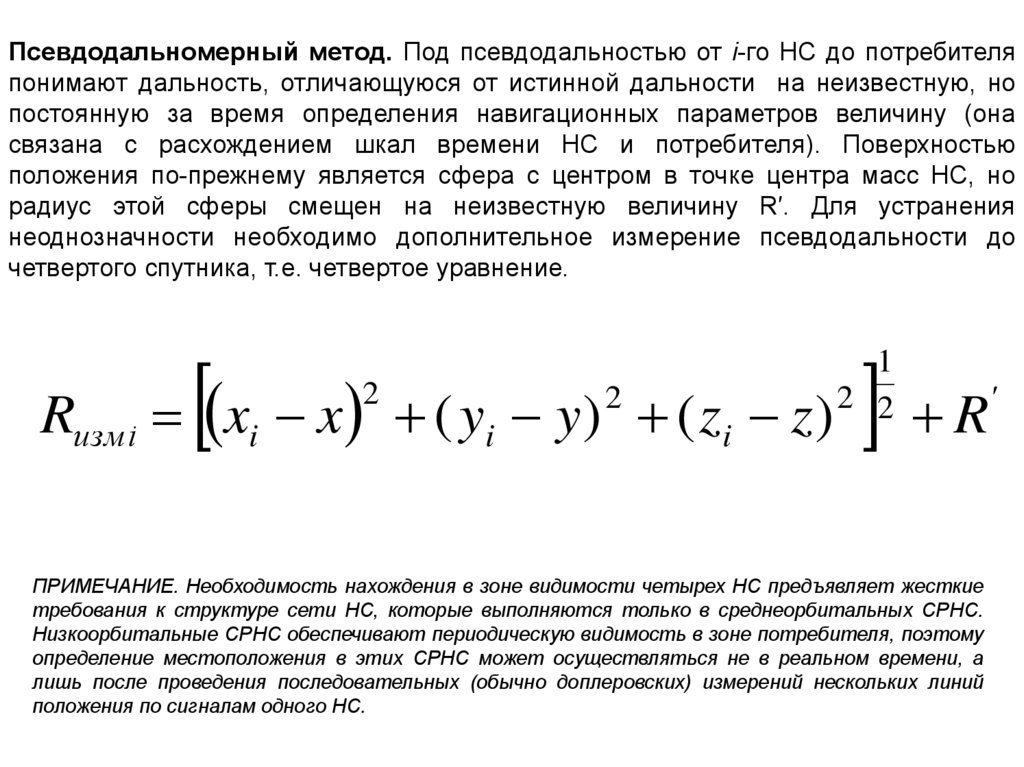
Псевдодальномерный метод. Под псевдодальностью от i-го НС до потребителяпонимают дальность, отличающуюся от истинной дальности на неизвестную, но
постоянную за время определения навигационных параметров величину (она
связана с расхождением шкал времени НС и потребителя). Поверхностью
положения по-прежнему является сфера с центром в точке центра масс НС, но
радиус этой сферы смещен на неизвестную величину R′. Для устранения
неоднозначности необходимо дополнительное измерение псевдодальности до
четвертого спутника, т.е. четвертое уравнение.
Rизмi xi x ( yi y ) ( zi z )
2
2
1
2 2
R
ПРИМЕЧАНИЕ. Необходимость нахождения в зоне видимости четырех НС предъявляет жесткие
требования к структуре сети НС, которые выполняются только в среднеорбитальных СРНС.
Низкоорбитальные СРНС обеспечивают периодическую видимость в зоне потребителя, поэтому
определение местоположения в этих СРНС может осуществляться не в реальном времени, а
лишь после проведения последовательных (обычно доплеровских) измерений нескольких линий
положения по сигналам одного НС.
'
33.
В псевдодальномерных методах вкачестве навигационного параметра
выступает
псевдодальность
.
Поверхностью положения - сфера с
центром в точке центра масс НКА/
Радиус этой сферы отличается от
истинной
дальности
R
на
неизвестную величину δR . Шкалы
времени НКА синхронизированы с
высокой
точностью,
величина
задержки δR = cτn считается
одинаковой
для
всех
НКА.
Для
устранения
возникшей
неопределенности
необходимо
провести
дополнительное
измерение,
т.е.
измерить
псевдодальность
до
четвертого
спутника. Именно необходимость
нахождения в зоне видимости
четырех
НКА
в
значительной
степени определяет структуру и
параметры
орбитальной
группировки НКА.
34.
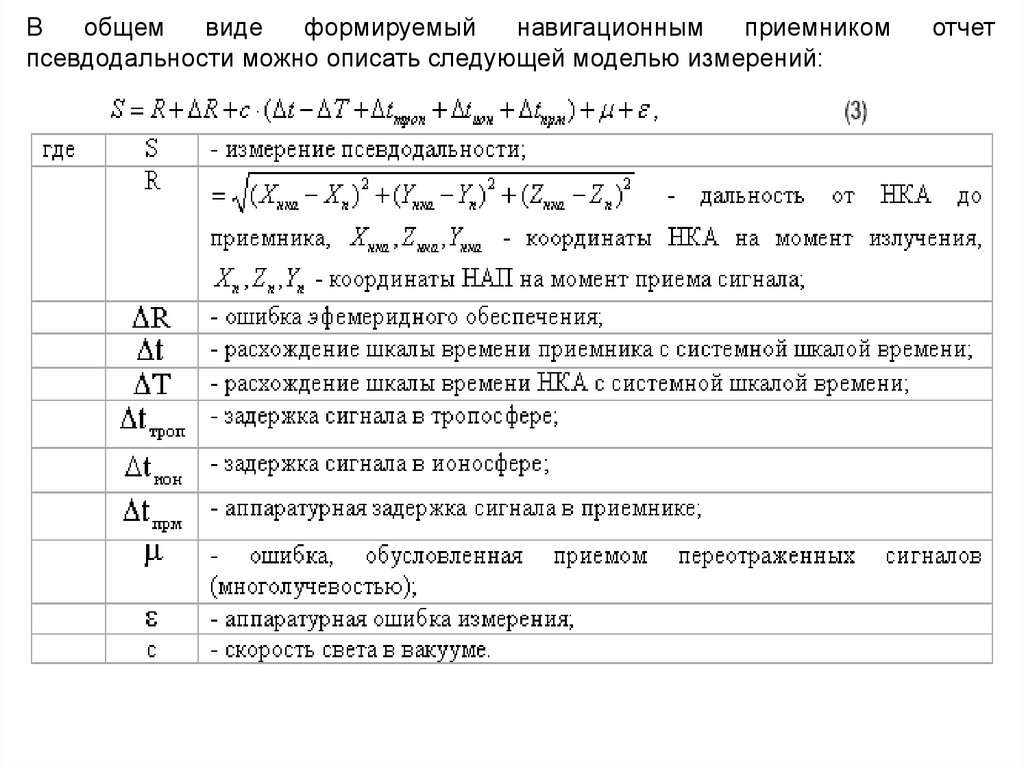
Вобщем
виде
формируемый
навигационным
приемником
псевдодальности можно описать следующей моделью измерений:
отчет
35.
Частотныйплан.Каждому спутнику системы присвоен определенный частотный канал. Каждому
каналу соответствует своя рабочая частота. Полный перечень этих рабочих частот
образует план частот.
Номинальные значения несущих частот для поддиапазонов L1 и L2 определяются
выражениями:
fLik = f0i + kΔfi ,
где i = 1,2 – номер диапазона частот,
k = 0..24 – номер частотного канала (литер),
f01 = 1602 МГц – несущая частота поддиапазона L1,
f02 = 1246 МГц – несущая частота поддиапазона L2,
Δ f1 = 562,5 кГц,
Δ f2 = 437,5 кГц.
В соответствии с рекомендациями Международного Союза Электросвязи (МСЭ) в
системе ГЛОНАСС предусмотрено изменение частотного диапазона для сигнала
стандартной точности с номеров частот k=0...+24 на номера k=(-7...+6). Все НКА
системы ГЛОНАСС, запущенные после 2005 г., уже используют номера частот
k=(-7...+6).
В таблице 1 показано соответствие номинальных значений несущих частот fLi k
каналам k=(-7...+6) для двух диапазонов.
36.
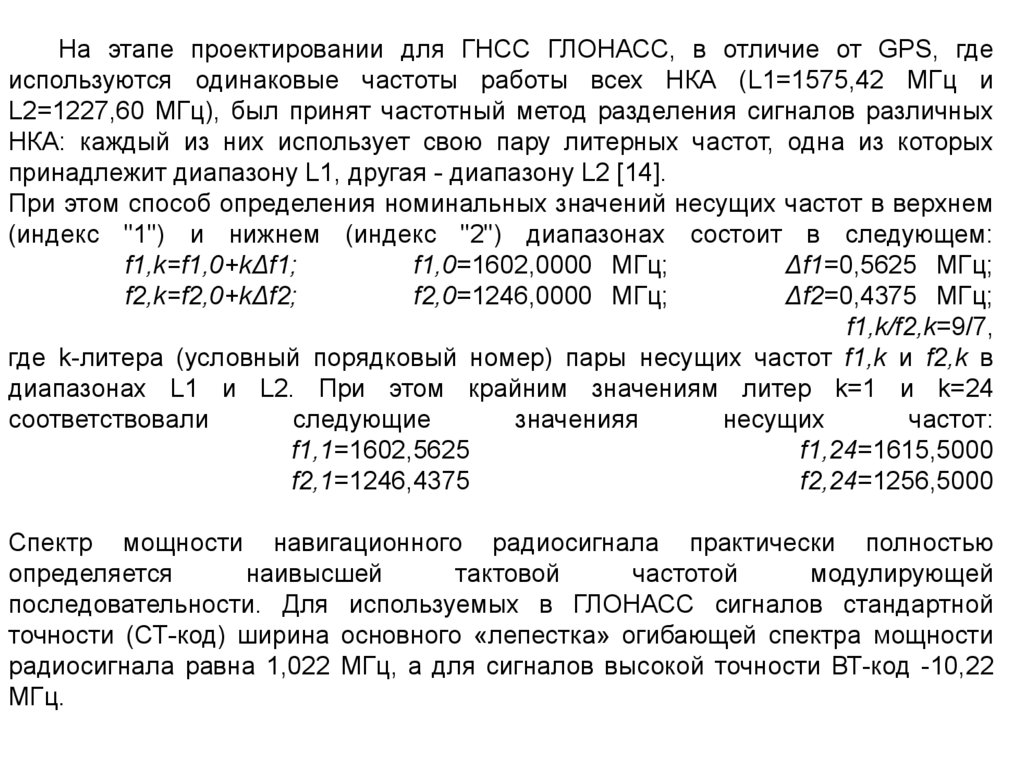
На этапе проектировании для ГНСС ГЛОНАСС, в отличие от GPS, гдеиспользуются одинаковые частоты работы всех НКА (L1=1575,42 МГц и
L2=1227,60 МГц), был принят частотный метод разделения сигналов различных
НКА: каждый из них использует свою пару литерных частот, одна из которых
принадлежит диапазону L1, другая - диапазону L2 [14].
При этом способ определения номинальных значений несущих частот в верхнем
(индекс "1") и нижнем (индекс "2") диапазонах состоит в следующем:
f1,k=f1,0+kΔf1;
f1,0=1602,0000 МГц;
Δf1=0,5625 МГц;
f2,k=f2,0+kΔf2;
f2,0=1246,0000 МГц;
Δf2=0,4375 МГц;
f1,k/f2,k=9/7,
где k-литера (условный порядковый номер) пары несущих частот f1,k и f2,k в
диапазонах L1 и L2. При этом крайним значениям литер k=1 и k=24
соответствовали
следующие
значенияя
несущих
частот:
f1,1=1602,5625
f1,24=1615,5000
f2,1=1246,4375
f2,24=1256,5000
Спектр мощности навигационного радиосигнала практически полностью
определяется
наивысшей
тактовой
частотой
модулирующей
последовательности. Для используемых в ГЛОНАСС сигналов стандартной
точности (СТ-код) ширина основного «лепестка» огибающей спектра мощности
радиосигнала равна 1,022 МГц, а для сигналов высокой точности ВТ-код -10,22
МГц.
37.
В системе ГЛОНАСС используется частотное разделение каналов (FDMA –Frequency - Division Multiple Access). Для НКА, находящихся на взаимно антиподных
орбитальных позициях, можно применить одинаковые несущие частоты, поэтому при 24
действующих НКА минимальное число несущих частот в каждом диапазоне равно 12 .
Наземный или околоземный потребитель не может принимать сигналы одновременно от
двух антиподных НКА, поэтому неоднозначность не возникает.
Космическому потребителю могут быть видны одновременно оба антиподных спутника.
Но проблема неоднозначности достаточно легко решается за счет пространственной и
доплеровской селекции сигналов. Во-первых, невозможно создать такую широконаправленную антенну, которая была бы способна одинаково эффективно принимать
сигналы спутников с разных направлений. Поэтому используют разные направленные
приемные антенны, подключенные к разным приемникам. Таким образом, происходит
пространственное разделение сигналов. Во-вторых, поиск несущей частоты каждого
НКА производится в довольно узкой полосе частот (около 1 кГц) около прогнозируемого
значения, с учетом доплеровского сдвига. Для наземных объектов максимальный
доплеровский сдвиг может достигать ± 5 кГц, тогда как для низкоорбитальных
космических объектов доплеровский сдвиг достигает ± 40 кГц, что позволяет однозначно
идентифицировать сигнал НКА по доплеровскому сдвигу.
В будущем в системе ГЛОНАСС помимо множественного доступа с разделением частот
FDMA будет использоваться и кодовое разделение каналов (CDMA – Code Division
Multiple Access). При кодовом разделении все спутники излучают сигналы на одной и той
же частоте, но каждый сигнал имеет свой код.
CDMA -разделение планируется использовать уже в сигналах спутника «Глонасс-К»
диапазона L3.
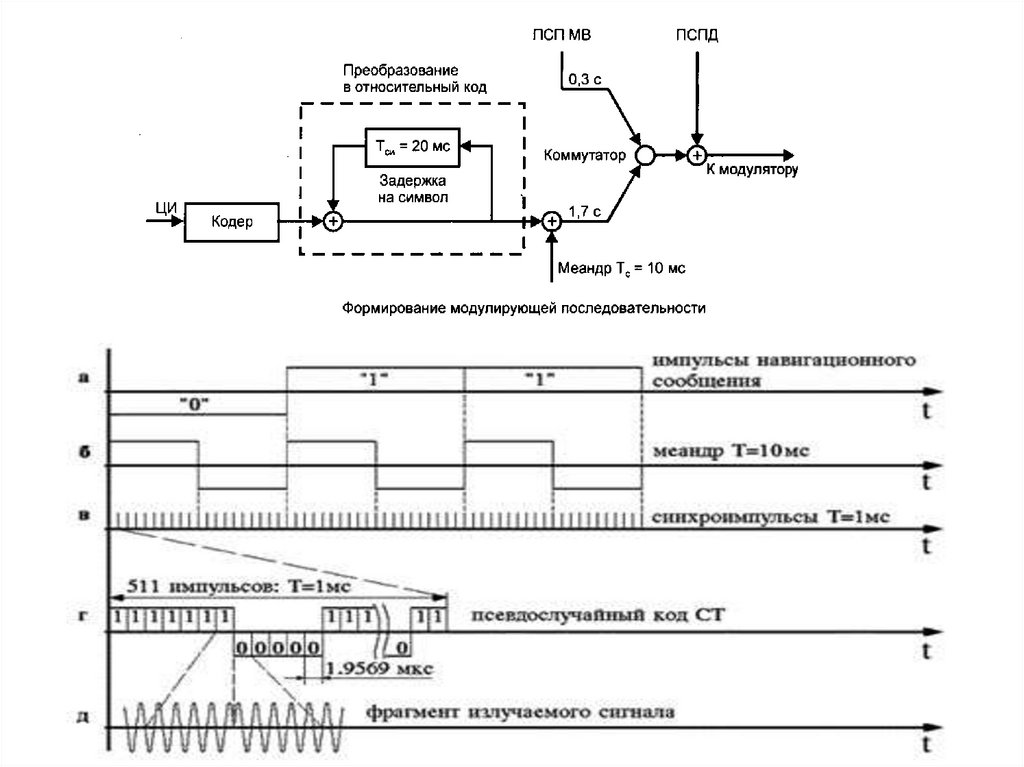
38.
Навигационный радиосигнал, передаваемый каждым НКА системы ГЛОНАСС насобственной несущей частоте в поддиапазонах L1 и L2, является
многокомпонентным фазоманипулированным сигналом. Фазовая манипуляция
несущей осуществляется на π радиан с максимальной погрешностью не более
±0,2 радиана.
Фаза несущего колебания поддиапазонов L1 и L2 передаваемого НКА
модулируется двоичной последовательностью, образованной сложением по
модулю два следующих двоичных сигналов:
• псевдослучайного дальномерного (ПСПД) кода, передаваемого со скоростью 511
кбит/с (тактовая частота 511 кГц, период повторения 1 мс);
• навигационной (служебной) информации, передаваемой со скоростью 50 бит/с
(тактовая частота 50Гц);
• вспомогательного меандрового колебания с тактовой частотой 100 Гц;
• кода метки времени (МВ), представляющего собой двоичную псевдослучайную
последовательность (ПСП) с тактовой частотой 100 Гц.
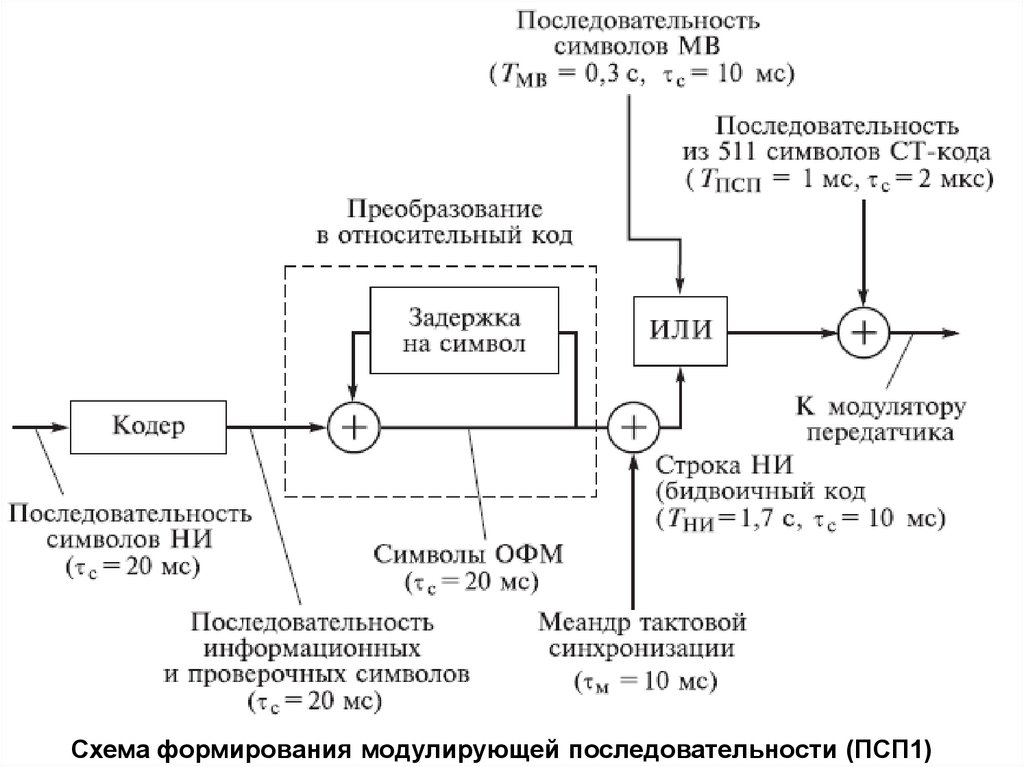
Основой для формирования всех перечисленные компонент сигнала является
бортовой стандарт частоты – атомные цезиевые сверхточные часы. Получаемая в
результате последовательность используется для формирования сигнала
стандартной точности. Упрощенная схема формирования модулирующей
последовательности показана на рисунке 1.
Двоичная последовательность для сигнала высокой точности образуется из
специального дальномерного кода. Закон формирования этого кода сообщается
только потребителям, имеющим разрешение МО РФ.
39.
Псевдослучайныйдальномерный
код
стандартной
точности
представляет собой М-последовательность длиной L=511 элементов
с периодом повторения 1 мс. Эта длина сравнительно невелика, но
обеспечивает быстрое вхождение в режим захвата и приемлемую точность
измерения дальности. Генерируется ПСПД код с помощью регистра
сдвига.
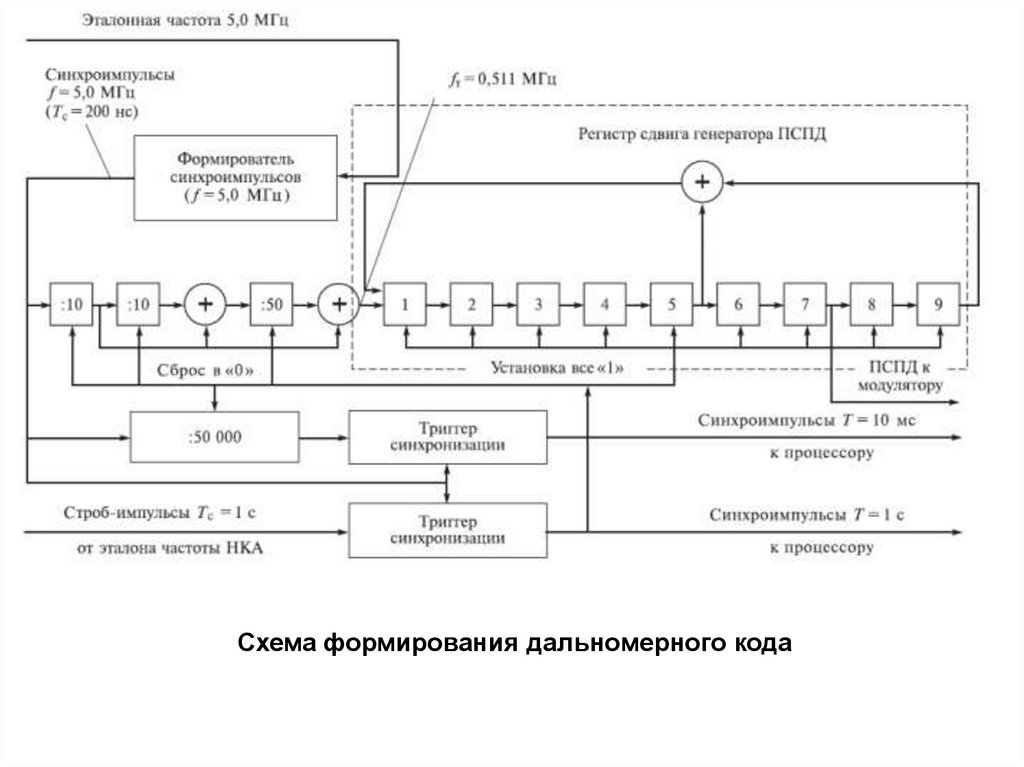
Порождающий полином для псевдослучайного дальномерного кода имеет вид
G(x) = 1 + х5 + х9. Упрощенная схема регистра сдвига, соответствующего
порождающему полиному, показана на рисунке 2. Дальномерный код
снимается с 7-го разряда девятиразрядного регистра сдвига. Код начального
состояния регистра сдвига соответствует «1» во всех разрядах регистра.
Начальным символом в периоде ПСП дальномерного кода является первый
символ в группе 111111100, повторяющийся через 1 мс.
40.
Схема формирования модулирующей последовательности (ПСП1)41.
Дальномерный код представляет собой М-последовательность, которая для СТкода имеет видВторая ПСП формируется по аналогичному принципу, однако в ней используется
М-последовательность с тактовой частотой 5,11 МГц и периодом 1 мс,
образующая дальномерный код высокой точности (ВТ). общего стандарта
частоты. Допустимый интервал между фронтами символов не превышает 6 нc.
Использование ВТ-кода регламентируется Министерством обороны РФ, поэтому
его структура официально не опубликована
42.
Схема формирования дальномерного кода43.
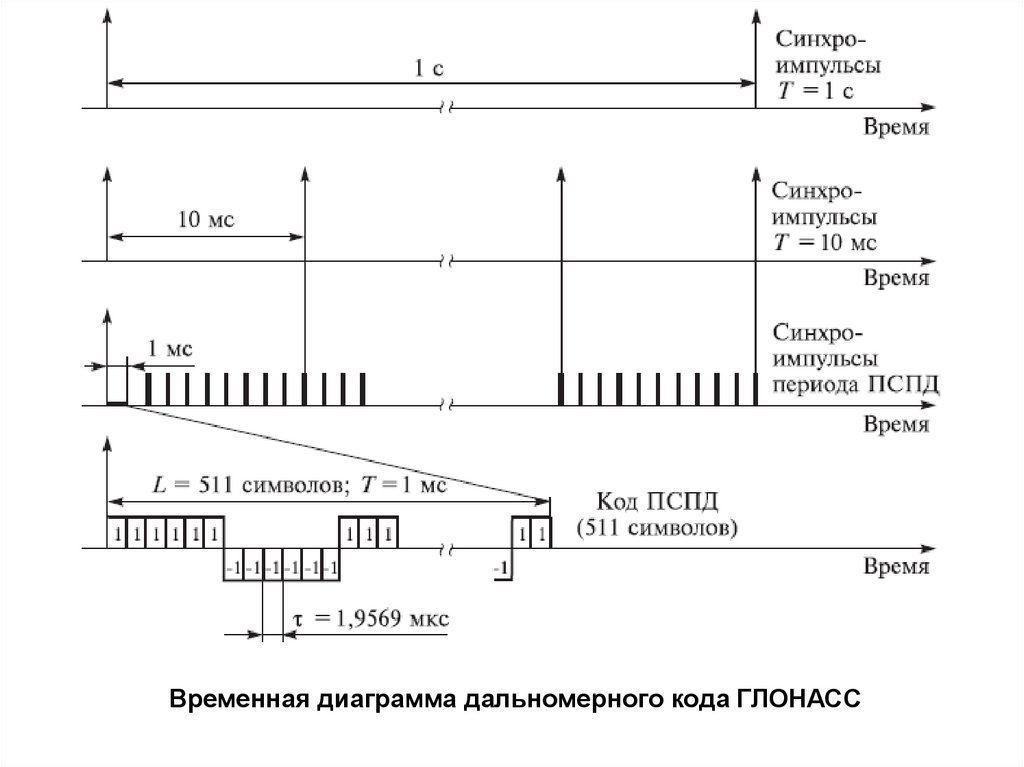
Временная диаграмма дальномерного кода ГЛОНАСС44.
Выводы: Сигналы системы ГЛОНАСС излучаются на двух частотах: 1600МГц (частотный поддиапазон L1)и 1250 МГц (частотный поддиапазон L2).
Планируется освоение частотного диапазона L3 (1207,14 МГц).
Навигационные сигналы подразделяются на сигналы стандартной точности
(СТ-сигнал) и высокой точности (ВТ-сигнал). СТ-сигнал предназначен для
использования гражданскими потребителями, ВТ-сигнал модулирован
закрытым кодом и предназначен для использования в интересах
Министерства обороны.
¨ Каждому спутнику системы присвоен определенный частотный канал.
Каждому каналу соответствует своя рабочая частота. Полный перечень
этих рабочих частот образует план частот. Сведения о распределении
частотных каналов между спутниками передаются в альманахе.
¨ В системе ГЛОНАСС используется частотное разделение каналов (FDMA
– Frequency - Division Multiple Access). В будущем будет использоваться и
кодовое разделение каналов (CDMA – Code DivisionMultiple Access).
¨ НКА системы ГЛОНАСС используют для передачи информации
шумоподобные фазоманипулированные сигналы. Для СТ-сигналовфаза
модулируется двоичной последовательностью, образованной сложением по
модулю два трех двоичных сигналов. Одним из них является
псевдослучайный дальномерный код, который представляет собой Мпоследовательность длиной L=511 элементов. Она генерируется с
помощью регистра сдвига.
45.
Система ГЛОНАСС является беззапросной, т.е. НКА излучают радиосигналы на частотах L1 и L2непрерывно, и любой приемник потребителя, находящийся в зоне радиовидимости спутника, в
произвольный момент времени может получать от него навигационную информацию в пассивном
режиме. В скором времени планируется освоение частотного диапазона L3 (1207,14 МГц).
Сигналы с этой частотой будут излучаться спутниками «Глонасс-К», которые сейчас проходят
летно-конструкторские испытания.
Излучаемые навигационные сигналы подразделяются на сигналы стандартной
точности (СТ-сигнал) и высокой точности (ВТ-сигнал), которые позволяют выделить два
соответствующих канала навигационного обслуживания – каналы стандартной и высокой
точности. Сигнал стандартной точности с тактовой частотой 0,511 МГц предназначен для
использования гражданскими потребителями, находящимися в любой стране мира. Сигнал
высокой точности с тактовой частотой 5,11 МГц модулирован специальным (закрытым) кодом и
предназначен для использования в интересах Министерства обороны Российской
Федерации, его использование спецпотребителями должно быть согласовано с Министерством
обороны Российской Федерации. Поэтому рассматриваемые каналы можно называть открытый и
закрытый.
НКА модификации «Глонасс» в поддиапазоне L1 излучают радиосигналы СТ и ВТ, а в
поддиапазоне L2 только один сигнал ВТ.
НКА модификации «Глонасс-М» в поддиапазонах L1 и L2 излучают навигационные сигналы 2-х
типов: СТ и ВТ.
Спутники «Глонасс-К» будут излучать такие же сигналы, какие «Глонасс-М», и к ним добавится
сигнал СТ в поддиапазоне L 3.
В отличие от сигнала стандартной точности американской системы GPS, который до 2000 года
подвергался искусственному загрублению, в системе ГЛОНАСС для сигнала стандартной точности
не предусматривается принудительного ухудшение точности.
Навигационные сигналы стандартной точности занимают в частотном диапазоне L1 полосу
шириной (1598,0625...1605,375)±0,511 МГц (на рисунке 2 показаны только два канала,
соответствующие крайним частотам диапазона).
46.
47.
48.
49.
Навигационное сообщение СРНС ГЛОНАСССтруктура навигационного сообщения
Навигационные сигналы, посылаемые со спутников, спутников содержат
дальномерную и служебную информацию.
Дальномерную информацию используют в аппаратуре потребителей для
определения навигационных параметров (дальность, вектор скорости потребителя, его
пространственная ориентация). Дальномерная информация заключена в сигналах
стандартной точности (доступна всем потребителям) и высокой точности (требуется
разрешение военных органов).
Служебная информация содержит сведения о координатах спутников, векторов их
скоростей, времени и др. Основная часть служебной информации формируется в
наземном сегменте и закладывается в бортовую память спутника во время сеанса
связи.
По своему содержанию навигационные служебные сообщения, передаваемые каждым
спутником системы, содержат оперативную и неоперативную информацию.
Оперативная информация относится к данному спутнику и содержит оцифровку
меток времени спутника, оценки сдвига бортовой шкалы времени относительно
системной шкалы и относительного отличия несущей частоты излучаемого
радиосигнала от номинального значения, а также эфемериды.
Неоперативная информация содержит данные о состоянии всех спутников
(альманах состояния), оценки сдвига бортовой шкалы времени каждого спутника
относительно системной шкалы времени (альманах фаз), грубые параметры орбит
всех спутников (альманах орбит), сдвиг шкал времени относительно эталона UTC (SU).
50.
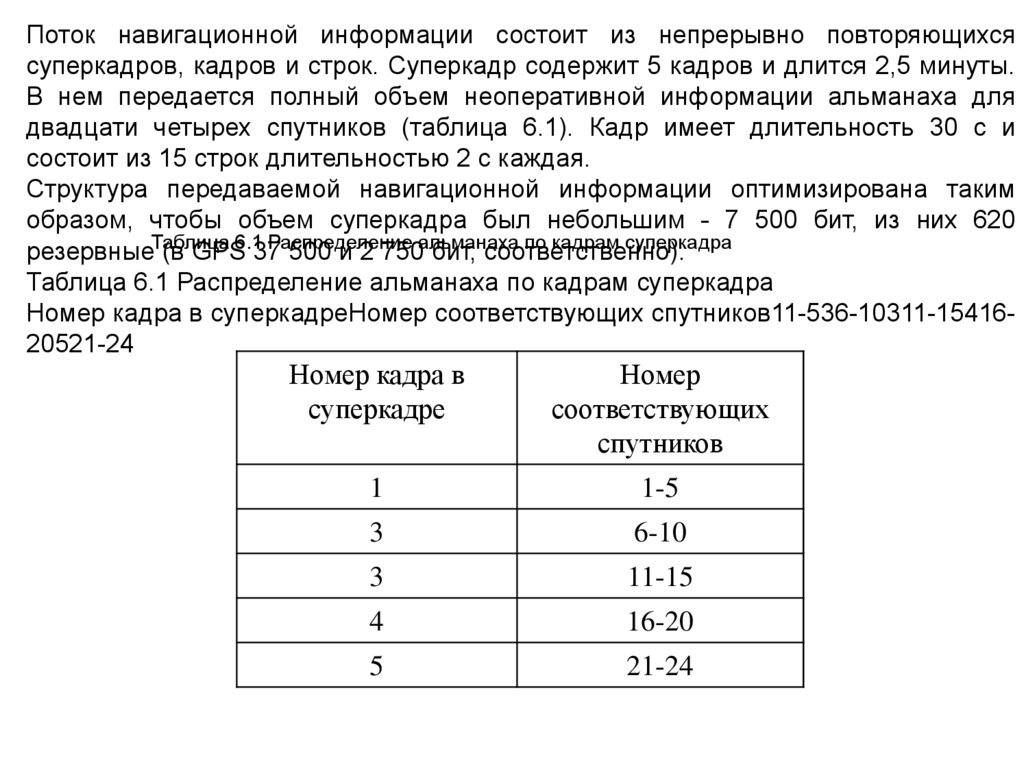
Поток навигационной информации состоит из непрерывно повторяющихсясуперкадров, кадров и строк. Суперкадр содержит 5 кадров и длится 2,5 минуты.
В нем передается полный объем неоперативной информации альманаха для
двадцати четырех спутников (таблица 6.1). Кадр имеет длительность 30 с и
состоит из 15 строк длительностью 2 с каждая.
Структура передаваемой навигационной информации оптимизирована таким
образом, чтобы объем суперкадра был небольшим - 7 500 бит, из них 620
Распределение альманаха по кадрам суперкадра
резервныеТаблица
(в GPS6.137
500 и 2 750 бит, соответственно).
Таблица 6.1 Распределение альманаха по кадрам суперкадра
Номер кадра в суперкадреНомер соответствующих спутников11-536-10311-1541620521-24
Номер кадра в
суперкадре
Номер
соответствующих
спутников
1
1-5
3
6-10
3
11-15
4
16-20
5
21-24
51.
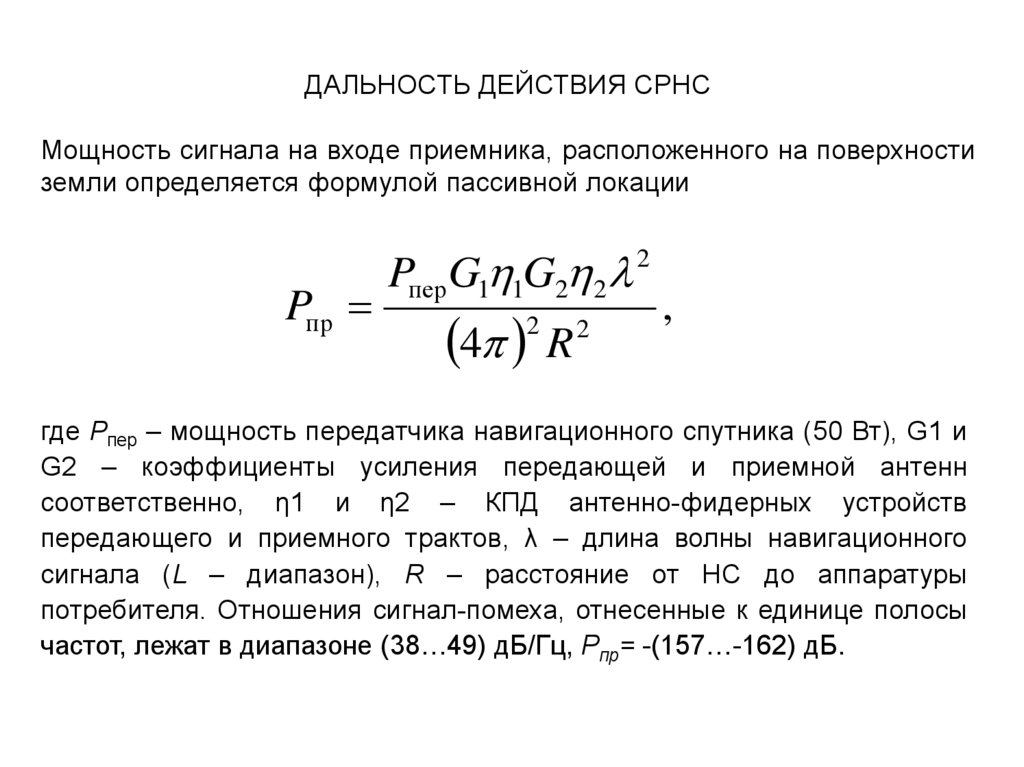
ДАЛЬНОСТЬ ДЕЙСТВИЯ СРНСМощность сигнала на входе приемника, расположенного на поверхности
земли определяется формулой пассивной локации
Pпр
Pпер G1 1G2 2 2
4
2
R
2
,
где Pпер – мощность передатчика навигационного спутника (50 Вт), G1 и
G2 – коэффициенты усиления передающей и приемной антенн
соответственно, η1 и η2 – КПД антенно-фидерных устройств
передающего и приемного трактов, λ – длина волны навигационного
сигнала (L – диапазон), R – расстояние от НС до аппаратуры
потребителя. Отношения сигнал-помеха, отнесенные к единице полосы
частот, лежат в диапазоне (38…49) дБ/Гц, Pпр= -(157…-162) дБ.
52.
Элементы дальномерного кода позволяют определить дальность доспутника с погрешностью 300 м. Для более точного определения
необходимо знать фазу генератора дальномерного кода. Схемы
построения опорных генераторов коррелятора позволяют определять
его фазу с точностью до 0,01 периода, что соответствует точности
определения псевдодальности равной 3 м.
По доплеровскому смещению частоты оценивается относительная
скорость перемещения спутника.
Необходимость нахождения в зоне видимости четырех НС
предъявляет жесткие требования к структуре сети НС, которые
выполняются только в среднеорбитальных СРНС. Низкоорбитальные
СРНС обеспечивают периодическую видимость в зоне потребителя
лишь (1 ... 2) нс, поэтому определение местоположения в этих СРНС
может осуществляться не в реальном времени, а лишь после
проведения последовательных (обычно доплеровских) измерений
нескольких линий положения по сигналам одного НС.
53.
Структура передаваемых сигналов СРНС. Структура навигационныхрадиосигналов системы Глонасс.
В системе Глонасс каждым спутником излучаются два фазоманипулированных
сигнала сдвинутые друг относительно друга по фазе на 90°. Используется
частотное разделение сигналов (FDMA) различных спутников. Частота первого
сигнала лежит в диапазоне L1 (1600 МГц), а частота второго — в диапазоне L2
(1250 МГц). Номинальные значения рабочих частот радиосигналов,
передаваемых в диапазонах L1 и L2, определяются выражениями:
fk1 = f1 + k Df1 ,
fk2 = f2 + k Df2 ,
где k = 0,1,...,24 — номера (каналов) литерных рабочих частот спутников;
f1 = 1602 МГц; Df1 = 0,5625 МГц; f2 = 1246 МГц; Df2 = 0,4375 МГц.
Для каждого спутника рабочие частоты сигналов в диапазоне L1 и L2
когерентны и формируются от одного эталона частоты. Отношение рабочих
несущих частот каждого спутника: Dfk1/Dfk2 = 7/9. Модулирующий сигнал
получают сложением по модулю 2 трех двоичных сигналов:
• грубого дальномерного кода, передаваемого со скоростью 511 Кбит/с;
• последовательности навигационных данных, передаваемых со скоростью 50
бит/с;
• последовательность радиоимпульсов (меандр), передаваемая со скоростью
100 бит/с.
54.
Состав и структура навигационных сообщений спутников системы Глонасс.Навигационные сообщения НС Глонасс используются потребителям для
навигационных определений и планирования сеансов связи. Они включают
оперативную и не оперативную информацию. Оперативная информация
относится к спутнику и включает: метки времени; сдвиг шкалы времени НС
относительно шкалы системы; относительное отличие несущей частоты спутника от
номинального значения; эфемероидную информацию.
Время привязки эфемеридной информации и частотно-временные поправки,
имеющие получасовую кратность от начала суток, позволяют точно определять
географические координаты и скорость движения НС.
Неоперативная информация содержит альманах, включающий: данные о состоянии
всех НС системы; сдвиг шкалы времени спутника относительно шкалы системы;
параметры орбит всех НС системы; поправку к шкале времени системы Глонасс.
Выбор оптимального “созвездия” спутников и прогноз доплеровского сдвига несущей
частоты обеспечивается альманахом системы. Навигационные сообщения
спутников имеют суперкадры длительностью 2,5 мин. Суперкадр состоит из пяти
кадров длительностью 30 с. Каждый кадр содержит 15 строк длительностью 2 с.
Последние 0,3 с занимает метка времени. Остальная часть строки содержит 85
символов цифровой информации, передаваемых с частотой 50 Гц. В составе
каждого кадра передается полный объем оперативной информации и часть
альманаха системы. Полный альманах содержится во всем суперкадре. При этом
информация суперкадра, содержащаяся в строках 1—4, относится к тому спутнику,
с которого она поступает (оперативная часть), и не меняется в пределах
суперкадра.
55.
Структура навигационных радиосигналов системы GPS. В системе GPSвсе спутники излучают сигналы с одинаковой частотой и используется кодовое
разделение сигналов (СDMA). Каждый спутник системы GPS излучает два
фазоманипулированных сигнала. Частота первого сигнала составляет
L1 = 1575,42 МГц, а второго — L2 = 1227,6 МГц. Сигнал несущей частоты L1
модулируется двумя двоичными последовательностями, каждая из которых
образована путем суммирования по модулю 2 дальномерного кода и
передаваемых системных и навигационных данных, формируемых со скоростью
50 бит/с. На частоте L1 передаются две квадратурные компоненты, бифазно
манипулированные
двоичными
последовательностями.
Первая
последовательность является суммой по модулю 2 точного дальномерного кода
Р или закрытого кода Y и навигационных данных. Вторая последовательность
также является суммой по модулю 2 грубого С/A (открытого) кода и той же
последовательности навигационных данных. Радиосигнал на частоте L2
бифазно манипулирован только одной из двух последовательностей. Выбор
модулирующей последовательности осуществляется по команде с Земли.
Каждый спутник использует свои дальномерные коды С/A и Р(Y), что позволяет
разделять спутниковые сигналы. В процессе формирования точного
дальномерного Р(Y) кода одновременно формируются метки времени
спутникового сигнала.
56.
Состав и структура навигационных сообщений спутников системы GPS.Структурное деление навигационной информации спутников системы GPS
осуществляется на суперкадры, кадры, подкадры и слова. Суперкадр образуется из
25 кадров и занимает 750 с (12,5 мин). Один кадр передается в течение 30 с и имеет
размер 1500 бит. Кадр разделен на 5 подкадров по 300 бит и передается в течение
интервала 6 с. Начало каждого подкадра обозначает метку времени,
соответствующую началу/окончанию очередного 6-с интервала системного времени
GPS. Подкадр состоит из 10 30-бит слов. В каждом слове 6 младших разрядов
являются проверочными битами. В 1-, 2- и 3-м подкадрах передаются данные о
параметрах коррекции часов и данные эфемерид НС, с которым установлена связь.
Содержание и структура подкадров неизменны на всех страницах суперкадра. В 4- и
5-м подкадрах содержится информация о конфигурации и состоянии всех НС
системы, альманахи спутников, специальные сообщения, параметры, описывающие
связь времени GPS с UTC.
Сигналы СРНС Galileo. Для СРНС Galileo Международный союз электросвязи МСЭ
(ITU – International Telecomunication Union) выделил шесть пользовательских
дипазонов частот в диапазоне L и один служебный в диапазоне С. Частоты всех трех
СРНС – Galileo, GPS, ГЛОНАСС – близко расположены. Кодовое разделение
сигналов CDMA (Сode Division Multiple Access) систем Galileo и GPS позволяет им
использовать перекрывающиеся участки частотного спектра и создает возможность
приема сигналов одним многоканальным радионавигационным приемником.
Частотная
многоканальность
СРНС
Galileo,
наряду
с
планируемыми
широкополосными сигналами, гарантирует надежную помехоустойчивую работу
системы, а также компенсацию ионосферных погрешностей навигации.
57.
58.
Подсистема контроля и управления. Наземный комплекс управления СРНС. ФункцииНКУ:
- командное и программное радиоуправление спутниковой группировкой;
- расчет орбитальных траекторий (эфемерид);
- частотно-временное обеспечение;
- мониторинг радионавигационного поля;
- радиотелеметрический мониторинг спутниковой группировки.
На НКУ используется аппаратура на основе водородного стандарта с относительной
нестабильностью 10-14. В состав подсистемы контроля и управления входят средства
коррекции шкал времени спутников относительно эталонной шкалы с погрешностью
(3…5) нс. НКУ включает координационно-вычислительный центр (КВЦ), станции
траекторных измерений и управления (СТИ), систему (наземного) эталона времени и
частоты (СЭВЧ). Данные вычислений передаются на НС и они транслируют их
потребителям в служебном сообщении в виде кадров соответствующего формата.
Проблемой работы НКУ является высокоточное определение и прогнозирование параметров
орбит навигационных спутников.
Достижение необходимой точности эфемерид навигационных спутнике потребовало
проведения большого объема работ по учету факторов второго порядка малости, таких как
световое давление, неравномерность вращения Земли и движение ее полюсов, а также
исключение действия на спутник в полете реактивных сил, вызванных негерметичностью
двигательных установок газоотделением материалов покрытий. В настоящее время точность
вычисления эфемерид НС при прогнозе на 30 ч составляет: вдоль орбиты — 20 м; по
бинормали к орбите — 10 м; по высоте 5 м (СКО).
59.
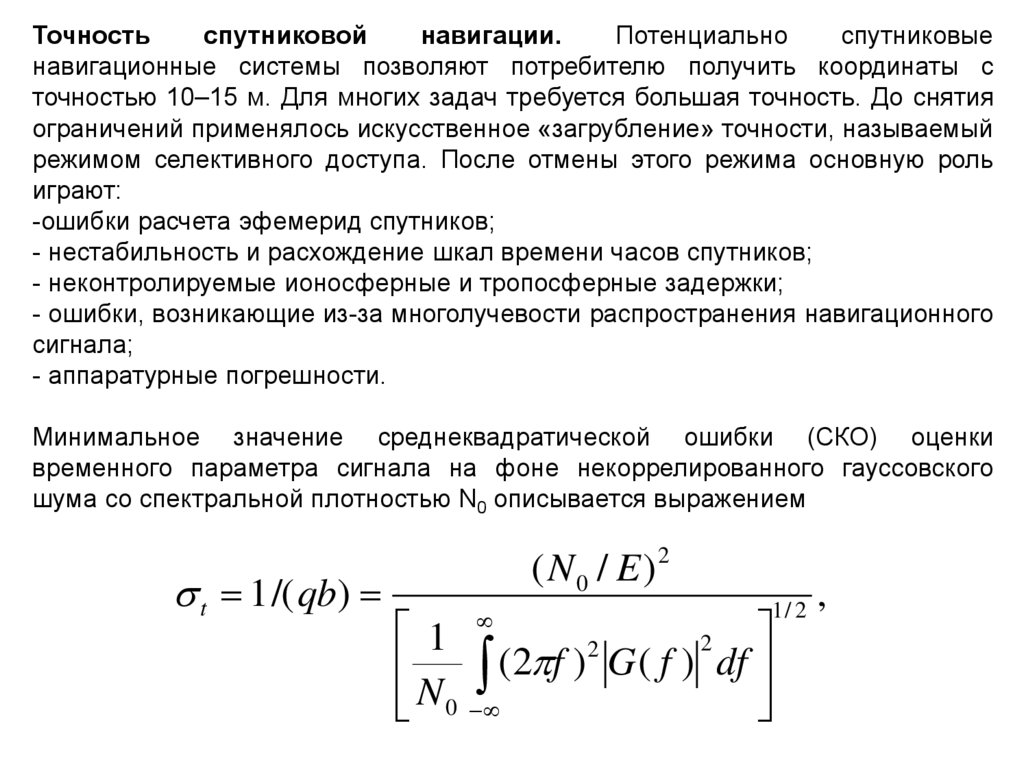
Точностьспутниковой
навигации.
Потенциально
спутниковые
навигационные системы позволяют потребителю получить координаты с
точностью 10–15 м. Для многих задач требуется большая точность. До снятия
ограничений применялось искусственное «загрубление» точности, называемый
режимом селективного доступа. После отмены этого режима основную роль
играют:
-ошибки расчета эфемерид спутников;
- нестабильность и расхождение шкал времени часов спутников;
- неконтролируемые ионосферные и тропосферные задержки;
- ошибки, возникающие из-за многолучевости распространения навигационного
сигнала;
- аппаратурные погрешности.
Минимальное значение среднеквадратической ошибки (СКО) оценки
временного параметра сигнала на фоне некоррелированного гауссовского
шума со спектральной плотностью N0 описывается выражением
t 1 /( qb)
( N0 / E )
1
N0
2
1/ 2
(2 f ) G( f ) df
2
2
,
60.
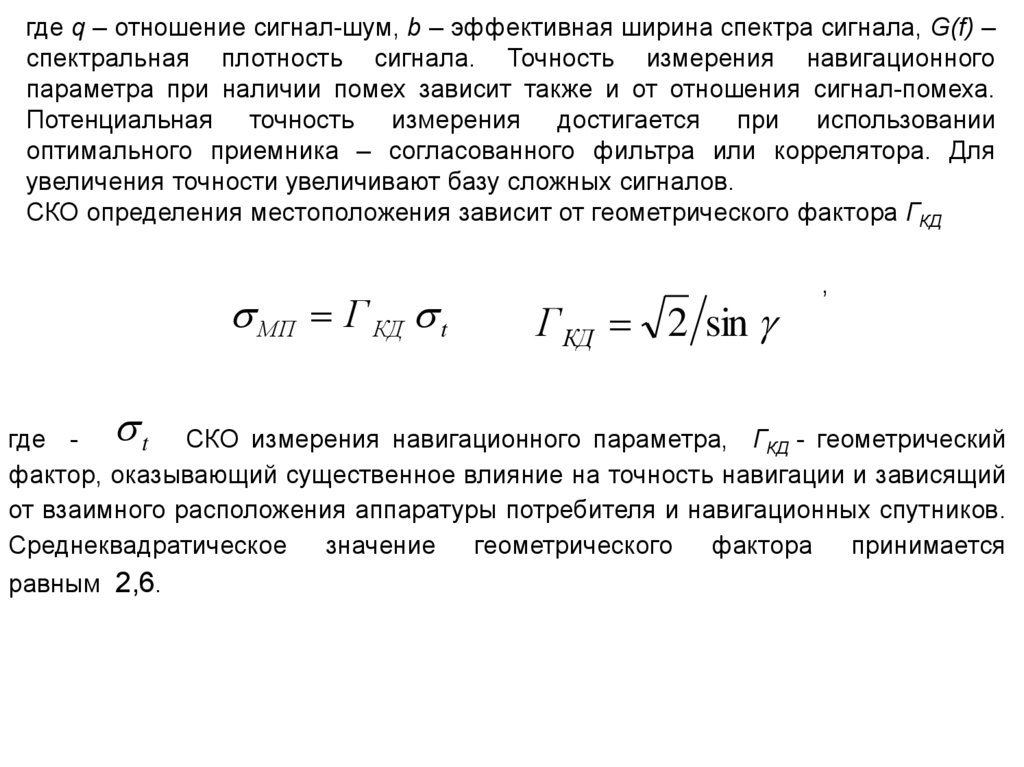
где q – отношение сигнал-шум, b – эффективная ширина спектра сигнала, G(f) –спектральная плотность сигнала. Точность измерения навигационного
параметра при наличии помех зависит также и от отношения сигнал-помеха.
Потенциальная точность измерения достигается при использовании
оптимального приемника – согласованного фильтра или коррелятора. Для
увеличения точности увеличивают базу сложных сигналов.
СКО определения местоположения зависит от геометрического фактора ГКД
МП Г КД t
Г КД 2 sin
,
где СКО измерения навигационного параметра, ГКД - геометрический
t
фактор, оказывающий существенное влияние на точность навигации и зависящий
от взаимного расположения аппаратуры потребителя и навигационных спутников.
Среднеквадратическое
значение
геометрического фактора
принимается
равным 2,6.
61.
62.
Методы повышения точности местоопределенияЕсть три основных направления:
1. Расширение диапазона частот. (НС системы GPS в будущем будут
передавать три новых навигационных сигнала для гражданского
пользования и два более мощных помехоустойчивых сигнала для МО США),
что позволит корректировать временные ошибки, возникающие из-за
преломления в ионосфере.
2. Повышение устойчивости к воздействию различных мешающих факторов, в
том числе радиопомех, т.к. передатчики НС имеют мощность 50 Вт, то их
сигнал легко подавляется близкорасположенными радиосредствами,
работающими в совпадающем диапазоне частот, в том числе
непреднамеренными и преднамеренными помехами.
Действие шумов и помех приводит к снижению отношения сигнал-шум.
63.
Навигационная аппаратура потребителей (АП) разнообразна поназначению, структуре и набору сервисных функций. АП осуществляет
выбор 4-х из всех наблюдаемых спутников для расчета
псевдодальностей и расчет навигационных данных. АП включает
радиоприемные устройства и устройства обработки, Некоторые модели
АП позволяют производить дифференциальные измерения расстояний
между двумя точками с сантиметровой точностью. Для этого
измеряется положение приемника в двух точках с минимально
возможным промежутком времени. При этом факторы, мешающие
измерению (погрешность орбит спутников, неоднородность атмосферы
в данном месте Земли и т.д.) взаимно компенсируются.
64.
Требования, предъявляемые к АПВ современных условиях, когда спутниковые навигационные технологии становятся
одним из основных средств навигации и управления подвижными объектами
аппаратура потребителя должна удовлетворять целому ряду требований,
сформулированных в международных, национальных и ведомственных стандартах.
Приведем основные требования, которые предъявляются стандартами и
рекомендованной практикой ИКАО4 к спутниковому навигационному приемнику.
4Международная организация гражданской авиации (ИКАО от англ. ICAO –
International Civil Aviation Organization) – учреждение ООН, устанавливающее
международные нормы гражданской авиации и координирующее её развитие с
целью повышения безопасности и эффективности.
Приемник должен через антенно-фидерное устройство принимать и обрабатывать
сигналы элементов СРНС, с которыми он взаимодействует, а именно: сигналы
спутников ГЛОНАСС и GPS, сигналы наземного функционального дополнения,
сигналы дифференциальной системы.
В зоне видимости потребителя потенциально может находиться 9–11 спутников
ГЛОНАСС, 9–11 спутников GPS. Навигационный приемник может взаимодействовать,
примерно, с 19–23 спутниками. Поэтому для проведения одномоментных измерений
приемник должен иметь 19–23 канала. Естественно, что эти требования нужно
рассматривать как ориентировочные.
Приемник должен исключать из решения навигационной задачи любой спутник,
обозначенный неработоспособным с помощью передаваемого в навигационном
сообщении признака (для спутников ГЛОНАСС такими признаками являются строка
2, разряды 80–72, признак Bn).
65.
Приемник должен обеспечивать непрерывное сопровождение минимум четырехспутников и решение навигационной задачи на основе измерений по этим
спутникам.
Приемник должен компенсировать влияние доплеровского смещения на
измерение начальной фазы несущей радиосигнала.
Приемник должен удостоверяться в правильности применения эфемеридной и
временной информации, поступающей со спутников, до решения навигационной
задачи.
Приемник должен удовлетворять требованиям к помехозащищенности согласно
стандарта и рекомендованной практики ИКАО.
Более полные требования изложены в документе «РАДИОНАВИГАЦИОННЫЙ
ПЛАН РОССИЙСКОЙ ФЕДЕРАЦИИ», утвержденном приказом Минпромторга
России от 02 сентября 2008 г. № 118.
7.3. Классификация АП
В зависимости от критерия, относительно которого осуществляется
классификация АП, можно выделить несколько ее типов. По одной из
классификаций все GPS-приемники делятся на два основных типа – кодовые и
фазовые. Первые для определения координат используют информацию
спутникового сигнала, вторые же для вычисления используют сам радиосигнал.
На сегодняшний день фазовые приемники используются исключительно в
геодезии и картографии, их стоимость может достигать нескольких десятков
тысяч долларов, а точность измерения доходит до нескольких миллиметров.
Для гражданских же нужд используются исключительно кодовые приемники.
66.
По предоставляемой точности приемники разделяют на профессиональные,обладающие высокой точностью определения местоположения (до нескольких
миллиметров), и бытовые. Первые в основном используются в военных целях, для
геодезии и картографии, а вторые получили широкое применение в различных сферах
современной жизни.
Профессиональное GPS оборудование отличается качеством изготовления компонентов
(в частности антенн), используемым программным обеспечением (ПО), рабочими
частотами (L1 + L2), алгоритмами подавления влияния ионосферы, поддерживаемыми
системами навигации (например NAVSTAR GPS, ГЛОНАСС, Galileo, Beidou),
увеличенным запасом электропитания. Стоимость таких приемников может достигать
десятков тысяч долларов.
GPS приемники для широкого круга пользователей:
портативные устройства – автомобильные (отдельное портативное
устройство или встроенное в транспортное средство в качестве бортового
компьютера), туристические, спортивные;
встроенные как функциональный узел в другие устройства – в КПК, ноутбук
или мобильный телефон.
Первые имеют собственный процессор для выполнения навигационных функций, а
вторые используют для своей работы навигационные приложения, предназначенные
для конкретной операционной системы основного устройства.
Аппаратуру потребителя часто классифицируют в зависимости от практического
применения: автомобильные, пешеходные, морские, авиационные, геодезические и т.д.
Существует также классификация, по которой АП разделяются на следующие классы:
67.
Чипсет (в переводе с англ. слова Chipset – набор микросхем) – это процессор,который используется для обработки сигналов. Чипсет является важнейшим
компонентом любого навигационного устройства, от которого во многом
зависит точность и качество его работы.
GPS-мыши (англ. GPS-mouse) – так называют законченные GPS-приемники,
которые внешне напоминают компьютерную мышь. Они не оснащены
дисплеем для отображения информации, и служат исключительно для сбора и
передачи данных на внешние устройства без сохранения их во внутренней
памяти.
GPS-мыши предназначены для работы с персональными
компьютерами, ноутбуками или КПК. GPS-трекеры. Отличительной
особенностью GPS-трекеров являются GPS-приемник, совмещенный с
системой электропитания и программным обеспечением, передатчик и
встроенная память. GPS-трекеры так же как и GPS-мыши не оснащаются
собственными дисплеями. Но в отличие от них помимо сбора и передачи
данных, GPS-трекеры способны хранить данные в модуле встроенной памяти.
С помощью GPS-приемника трекер определяет свои координаты, они
записываются во встроенную память и хранятся там, а передатчик отправляет
их на серверный центр для дальнейшей обработки и анализа. Передатчик
терекера может передавать данные как беспроводными способами (GSM:
GPRS и SMS, спутниковые, Bluetooth, Wi-Fi), так и проводными (USB, RS-232,
PS/2). В связи с понижением цен на GPRS трафик проводные и Bluetooth
трекеры используются всё реже.
68.
69.
Навигационная система для позиционирования объекта в пространствепомимо сигналов спутников использует карты, имеющие видео-, графический
или текстовый форматы, различные датчики, информацию от других объектов.
На дисплее на электронной карте может отображаться текущее
местоположение объекта и выбранный путь. Прецизионные устройства
находятся в распоряжении только крупных промышленных организаций. К
этому классу также принадлежат геодезические GPS-приемники. Как правило
такие приемники оснащены антеннами-тарелками, способными принимать
сигналы высокой точности для более точного позиционирования (несколько
миллиметров).
Военные приемники способны принимать специальный зашифрованный
дальномерный код и обладают ключом для его декодирования. В таких
приемниках используются очень точные карты с нанесенными на нее
стратегически важными объектами, которые недоступны обычному
пользователю. Такие приемники находятся в распоряжении только
вооруженных сил страны и дружественных ей государств.
70.
Военный GPS-приемникиОсновные производители GPS-чипсетов:
SiRF – SiRFstar III, SiRFatlasIV
U-blox
Trimble
Основные
производители
GPS/ГЛОНАСС-чипсетов
и
модулей:
М2М телематика – ГеоС-1, ГеоС-1М, ГеоС-3
Спирит Телеком – DuoStar-2000
Основные производители приёмников для массового
применения:
Garmin
GlobalSat
GlobusGPS
Magellan
Navigon
Tom-Tom и другие
Основные производители профессиональных (в том числе
геодезических) приёмников:
Ashtech
Javad
Leica
NovAtel
Trimble
Topcon и другие
Поставщики информации о загруженности дорог (трафик,
пробки) для навигаторов
Навиком Трафик для навигаторов Garmin
Яндекс пробки для мобильных телефонов
СитиГид
71.
Выводы:Аппаратура потребителей СРНС предназначена для определения вектора
потребителя – пространственных координат, вектора скорости, времени.
Все процессы обработки сигналов и информации в АП можно разделить первичную
и вторичную обработки.
Первичная обработка включает в себя поиск сигналов и слежение, во время которого
производится измерение радионавигационных параметров τ и fD.
Вторичная обработка включает преобразование радионавигационных параметров τ
и fD в навигационные D и Vr, и нахождение на их основе вектора потребителя.
В приемнике выделяют основные функциональные части – антенный блок,
радиочастотная часть, цифровой коррелятор, процессор. Антенна принимает
сигналы спутника, в радиочастотной части они усиливаются, фильтруются и
оцифровываются. В корреляторе формируется опорный сигнал, по которому
производятся все необходимые измерения. В корреляторе также осуществляется
работа систем поиска и слежения. Последняя управляется процессором. Процессор
вычисляет координаты и через интерфейсное устройство выдает их потребителю.
Зона радиовидимости приемника – часть околоземного пространства, видимая из
приемника при углах возвышения над местным горизонтом более 7°.
Все навигационные приемники имеют многоканальную структуру.
Оптимальное рабочее созвездие – когда один спутник находится в зените, а еще три
спутника равномерно распределены в зоне видимости, образуя тетраэдр.
Альманах – таблица положений всех спутников и параметров их движения. Данные
альманаха действительны в течении 28 дней.
Любой навигационный приемник должен удовлетворять требованиям, которые
предъявляются стандартами и рекомендованной практикой ИКАО.
В зависимости от критерия аппаратуру потребителя можно по-разному
классифицировать.
72.
GPS-логгер (GPS рекордер, пассивный трекер или GPS DATA-логгер) – особыйкласс GPS-радиоприемников, который может работать в режиме обычного GPSприемника (только принимая информацию от спутниковой группировки) или в
режиме рекордера/логгера (от англ. record – записывать), записывая
информацию о пройденном пути в свою встроенную память. Впоследствии
накопленную информацию из приемника можно выгрузить в компьютер для ее
анализа.
GPS-логгер обычно используется для спутникового мониторинга людей,
домашних животных и других ценных объектов. От обычного GPS-приемника
GPS-логгер отличается отсутствием дисплея, а от GPS-трекера его отличает
отсутствие GSM модуля, обеспечивающего онлайн-передачу данных на
серверный центр мониторинга.
73.
Принцип построения аппаратуры потребителя (АП)Аппаратура
потребителей
СРНС
предназначена
для
определения
пространственных координат, вектора скорости, текущего времени и других
навигационных параметров в результате приема и обработки радиосигналов
навигационных спутников.
Все процессы обработки сигналов и информации в АП условно принято
разделять на две основные категории: первичную и вторичную обработки.
Под первичной обработкой понимают поиск сигналов по задержке и частоте, а
также слежение за фазой и задержкой сигнала, во время которого производится
измерение
радионавигационных
параметров.
Напомним,
что
к
радионавигационным параметрам относят задержку распространения τ и
доплеровское смещение частоты fD сигнала.
Под
вторичной
обработкой
понимают
процесс
преобразования
радионавигационных параметров τ и fD в навигационные: псевдодальности D
и псевдоскорости Vr, и нахождения на их основе вектора потребителя
(пространственные координаты, вектор скорости и время).
В приемнике можно выделить следующие функциональные части:
антенный блок
радиочастотная часть
цифровой коррелятор
процессор
74.
75.
Антенный блок включает в себя непосредственно антенну и предварительныйусилитель с полосовым фильтром (на рисунке 7.1 обозначен как ПУ/ПФ). Антенна
принимает сигналы от НКА, находящихся в зоне радиовидимости1. В ПУ/ПФ
совокупность принятых сигналов предварительно усиливается и фильтруется во
всей полосе частот, которые используются спутниками системы (то есть в полосе
от 1593 до 1609 МГц).
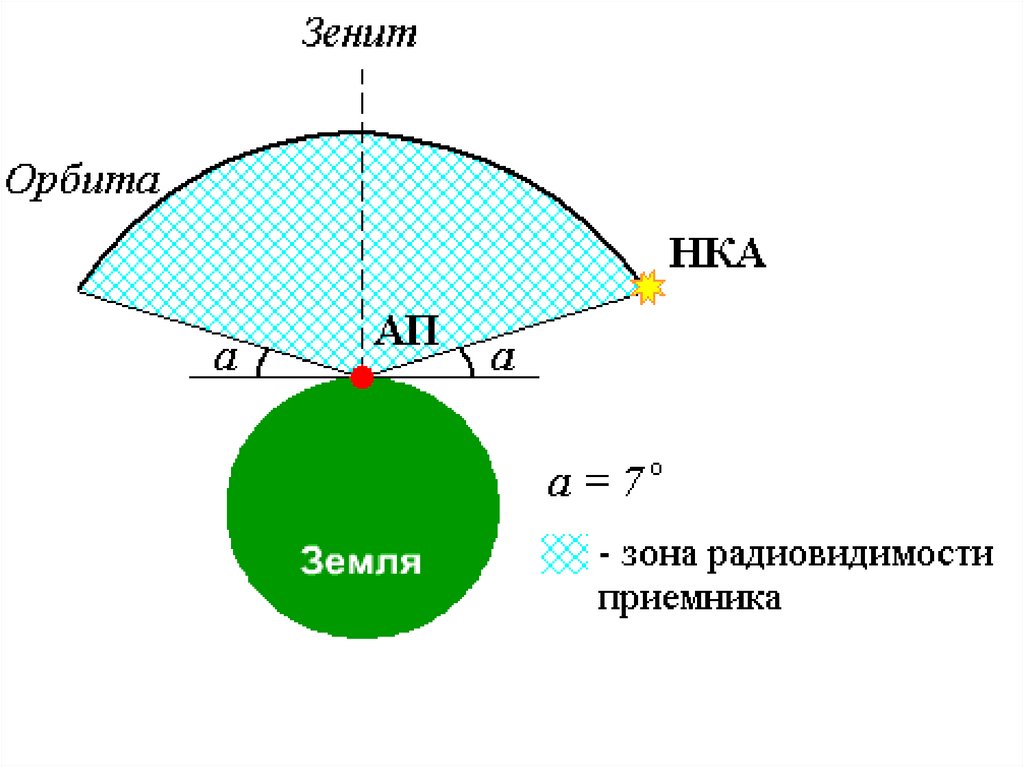
1Большинство космических радиолиний работает в диапазоне СВЧ, вследствие
чего проведение сеансов связи между НКА и приемником оказывается возможным
только в течение времени пребывания НКА в зоне его прямой видимости. Зоной
радиовидимости приемника принято считать всю часть околоземного
пространства, видимую из приемника при углах возвышения над местным
горизонтом более 7° (рисунок 7.2). В этой зоне обеспечивается устойчивая
радиосвязь наземных и бортовых радиосредств и заданная точность траекторных
измерений. Однако иногда рассматривают зоны радиовидимости и при углах
возвышения менее 7°.
76.
77.
Для оценки вектора потребителя необходимы псевдодальности и псевдоскорости,измеренные относительно, как минимум, четырех НКА (см. п. 2). То есть приемник
должен одновременно принять минимум четыре спутниковых сигнала. Поэтому все
навигационные приемники имеют многоканальную структуру (24 канала в
обычных приемниках и более 24 в приемниках, работающих одновременно по
сигналам нескольких СРНС). Заметим, что антенный блок – это единственная часть
приемника, которая не является многоканальной.
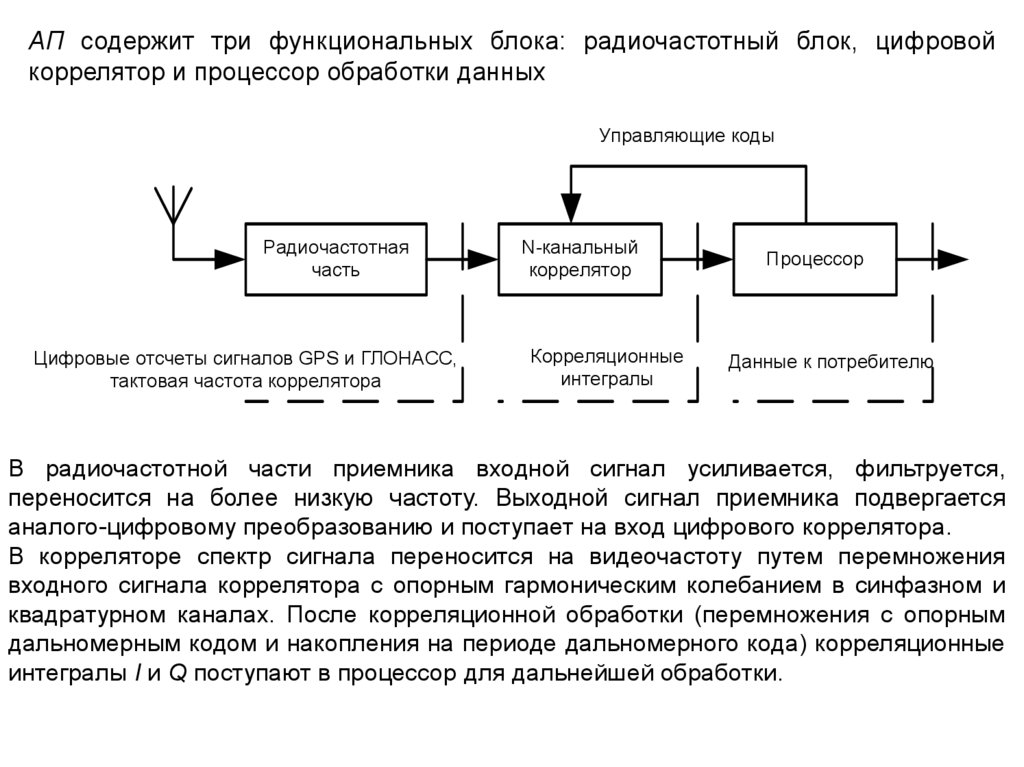
В радиочастотной части сигналы, принятые антенной, усиливаются и фильтруются.
Так как в ГЛОНАСС сигнал от каждого спутника имеет свою несущую частоту, то
каждый канал должен быть настроен на частоту сигнала одного из НКА и
селектировать (отбрасывать) частоты сигналов других НКА.
Современные приемники являются аналого-цифровыми системами, сочетающими
аналоговую (на рисунке аналоговый приемник – АПр) и цифровую обработку сигналов.
После аналого-цифрового преобразования (АЦП) цифровые отсчеты входного сигнала
с выхода радиочастотной части поступают на вход цифрового коррелятора. Помимо
этого, в радиочастотной части формируется тактовая частота для цифровой части
приемника. Измерения параметров сигнала в приемнике производятся путем
сопоставления входного сигнала с его точной копией, которую называют опорным
сигналом и формируемым цифровым опорным генератором. В корреляторе
происходит выделение опорного сигнала наиболее близко совпадающего с опорным
сигналом. Управление работой опорного генератора осуществляется по сигналам,
поступающим от процессора. Опорный генератор – это один из важнейших элементов
приемника, от стабильности его частоты зависят точностные характеристики и
надежность аппаратуры потребителя.
78.
В N-канальном корреляторе оценивается степень связи (или похожести) опорногои входного сигналов, то есть происходит идентификация сигнала спутника. А также
корреляционная обработка позволяет выбрать среди всех принятых спутниковых
сигналов наименее зашумленные и наиболее мощные сигналы.
Приемник работает в двух основных режимах: поиска и обнаружения сигналов от
НКА по частоте и задержке и непрерывного слежения. Как отмечалось, оба режима
относятся к алгоритмам первичной обработки.
В режиме поиска сигнала производится «грубая» оценка его параметров – задержки
τ (оценивается в N-канальном корреляторе путем определения временного сдвига
принятого сигнала относительно опорного) и доплеровского смещения частоты fD.
Это позволяет осуществить захват сигнала, то есть перейти к непрерывному
слежению за сигналом. После захвата происходит уточнение полученных на этапе
поиска параметров τ и fD. Эти «уточненные» данные используются затем для
вычисления псевдодальностей и псевдоскоростей.
Для потребителя, находящегося на поверхности Земли, существует строго
определенная область возможных значений задержек (τmin, τmax) и доплеровских
смещений частот (fDmin, fDmax) = ±5кГц сигналов от НКА. Каждая пара значений
(τ, fD) может соответствовать только какому-либо одному спутнику. Процедура
поиска заключается в последовательном переборе множества возможных значений
(τ, fD) и сопоставлении их с задержкой и доплеровским сдвигом каждого сигнала из
общей совокупности сигналов, принятых антенной приемника. Таки образом поиск
проводится по сигналу каждого спутника в отдельности. Благодаря многоканальной
структуре приемника поиск можно вести параллельно по нескольким спутникам, что
значительно сокращает время позиционирования. Кроме того, для ускорения
поиска по отдельному спутнику выделенный ему канал также, как правило, имеет
79.
Алгоритм слежения осуществляется системой фазовой автоподстройки (ФАП) исхемой слежения за задержкой (ССЗ). Часть алгоритма реализуется в
корреляторе, а замыкается контур слежения через процессор, который выдает
управляющие коды на генератор опорного колебания (на рисунке 7.1 контур
слежения показан красным цветом).
Ниже рассмотрена методика уточнения радионавигационных параметров τ и fD в
приемнике.
Дальность при навигационных измерениях характеризуется временем
распространения сигнала от спутника до объекта. Информация, содержащаяся в
навигационном сообщении, позволяет установить момент излучения некоторого
фрагмента сигнала со спутника (метка времени). Разность между моментом
приема этого фрагмента сигнала tприема и моментом излучения его спутником
tизлучения равна задержке сигнала: τ = tприема – tизлучения. Задержка,
умноженная на скорость света, является псевдодальностью.
На основании измерений параметров опорного гармонического колебания
определяют частоту и фазу несущего колебания принятого сигнала спутника.
Уход его частоты относительно номинального значения (сетка номинальных
частот системы ГЛОНАСС приведена в п. 5) даст доплеровское смещение
частоты fD = fноминальное – fвх. сигнала, по которому оценивается скорость
потребителя относительно спутника (псевдоскорость).
80.
Процессор является устройством, в котором реализуется вычислительный процесси управление работой приемника. Он решает следующие задачи: выбор рабочего
созвездия2 НКА из числа видимых спутников; цифровую обработку данных
коррелятора для замыкания контуров алгоритмов поиска сигналов по задержке и
частоте, а также слежения за фазой и задержкой сигнала; преобразование
радионавигационных параметров в навигационные (алгоритмы вторичной
обработки); сглаживание и фильтрация измеренных навигационных параметров;
решение навигационной задачи с выдачей координат и параметров движения
объекта; фильтрацию координат; комплексирование с данными автономных
навигационных систем объекта (для комплексных систем навигации);
форматирование
и
дешифрование
эфемеридной
информации;
расчет
прогнозируемых значений ошибок; накопления и хранение альманаха3; контроль
работоспособности отдельных блоков и АП в целом.
2На точность определения координат влияет взаимное расположение спутников и
потребителя. В аппаратуре потребителя для определения его местоположения
используются сигналы не всех видимых спутников, а лишь некоторых из них,
которые образуют так называемое рабочее созвездие. В процессе работы
навигатора рабочее созвездие постоянно обновляется. Существует такое понятие
как оптимальное рабочее созвездие, когда один спутник находится в зените, а
еще три спутника равномерно распределены в зоне видимости, образуя тетраэдр. В
аппаратуре потребителя рабочее созвездие выбирается таким, чтобы оно было как
можно ближе к оптимальному.
81.
Принцип работы спутниковых систем навигации основан на измерениирасстояния от объекта до спутников, положение которых известно с большой
точностью. Таблица положений всех спутников и параметров их движения
называется альманахом, которым должен располагать любой навигационный
приемник до начала измерений. Данные альманаха могут извлекаться из
репрограммируемой памяти процессора, куда они предварительно вручную
заносятся оператором. Каждый спутник передает в своем сигнале весь
альманах, поэтому другой путь ввода данных альманаха состоит в приеме
альманаха от какого-либо спутника. Но в этом случае на поиск сигнала спутника
и на прием альманаха могут потребоваться десятки минут. Чтобы при каждом
включении не загружать заново альманах, приемник сохраняет его в памяти со
времени последнего сеанса и если он не устарел –использует его. Данные
альманаха действительны в течении 28 дней. По истечении этого срока
имеющийся в АП альманах автоматически обновляется при приеме сигналов.
В зависимости от типа АП навигационный процессор может быть построен как
по однопроцессорной, так и по многопроцессорной структуре.
Помимо перечисленных задач на навигационный процессор может быть
возложено выполнение и ряда сервисных задач потребителя, таких как расчет
отклонения от траектории заданного движения, выработка информации о
прохождении поворотных пунктов маршрута, преобразование координат из
одной системы в другую.
Интерфейсное устройство предназначено для обеспечения взаимодействия
приемника с внешними устройствами, например, с дисплеем.
82.
83.
АП содержит три функциональных блока: радиочастотный блок, цифровойкоррелятор и процессор обработки данных
Управляющие коды
Радиочастотная
часть
Цифровые отсчеты сигналов GPS и ГЛОНАСС,
тактовая частота коррелятора
N-канальный
коррелятор
Корреляционные
интегралы
Процессор
Данные к потребителю
В радиочастотной части приемника входной сигнал усиливается, фильтруется,
переносится на более низкую частоту. Выходной сигнал приемника подвергается
аналого-цифровому преобразованию и поступает на вход цифрового коррелятора.
В корреляторе спектр сигнала переносится на видеочастоту путем перемножения
входного сигнала коррелятора с опорным гармоническим колебанием в синфазном и
квадратурном каналах. После корреляционной обработки (перемножения с опорным
дальномерным кодом и накопления на периоде дальномерного кода) корреляционные
интегралы I и Q поступают в процессор для дальнейшей обработки.
84.
Аппаратура потребителей85.
1. Радиочастотный блок, обеспечивающий:-прием сигналов НКА;
-их усиление и предварительную фильтрацию;
-аналого-цифровое преобразование сигналов на выходе приемника;
-формирование опорных, синхронизирующих и других сигналов.
2. Процессор первичной обработки, решающий следующие основные
задачи:
оптимальную (согласованную) фильтрацию сигналов НКА, реализуемую с
помощью многоканальной корреляционной обработки;
-поиск и обнаружение сигналов выбранного созвездия НКА;
-слежение за сигналами и измерения РНП;
-демодуляцию навигационного сообщения.
3. Навигационный процессор, обеспечивающий:
-декодирование навигационного сообщения;
-решение основной навигационно-временной задачи - определение
параметров ВС потребителя;
-управление режимами работы и параметрами как собственными, так и других
узлов АП;
-контроль качества НВО и работоспособности аппаратуры;
-выполнение различных сервисных функций, зависящих от назначения
аппаратуры и режима ее работы.
Кроме того, в состав АП могут входить вспомогательные устройства:
интерфейсные, управления и индикации, питания и др.
86.
Пример параметров ресиверов приемников АП (U-blox LEA-5S)Число каналов приема
50 параллельных каналов
Обновление данных
4 раза в секунду
Рабочая частота
1575,42 МГц (L1)
Точность измерения
2.5 м CEP (50%) 2D
5 м CEP (50%) 3D
Горячий старт: 1 с
Время старта
Теплый старт: 29 с
Холодный старт: 29 с
Повторный захват сигнала
Чувствительность
Менее 1 с
-144 дБм в режиме обнаружения сигнала
- 160 дБм в режиме слежениия
Протокол
NMEA, RTCM, UBX
Последовательный
интерфейс
1 UART, 1 USB V2.0 Full Speed 12 Mbit/s, 1 DDC (I2C compliant), 1
SPI
Тип антенны
Активная или пассивная
Выходное сопротивление
50 Ом
Напряжение питания
2,7 В ÷ 3,6 В
87.
Организованные помехи типа JAMMERJAMMER – это одиночный источник помех. При мощности около 100 Вт его
влияние на приемник GPS не так эффективно, как влияние многих маломощных
до 1 Вт и распределенных по пространству источников помех. Если разместить
на поверхности земли несколько 100-н jammers на расстоянии 10-20 км друг от
друга, то их сложно запеленговать, поскольку создается сложная
интерференционная картина, меняющаяся из-за расстройки и нестабильности
их частот. Иногда размещают jammers на воздушных шарах. (Стоимость такого
jammer составляет около $500).
Для борьбы с такими помехами применяют антенную решетку, уменьшающую
коэффициент усиления антенны в направлении каждого jammer.
Методом борьбы с помехой является и адаптивная узкополосная режекторная
фильтрация, заключающаяся в постановке на входе коррелятора
самонастраивающегося узкополосного фильтра, не пропускающего несущую
помехи в коррелятор. Этот метод сложен в реализации и не работает, если
много jammers работают на близких, но разных частотах.
Таким образом, для защиты от оружия, управляемого с помощью GPS,
разрабатываются jammers, работающие на разных частотах в диапазоне 15761579 Мгц, размещаемые на земле и на воздушных шарах.
Spuffing – навязывание навигационным приемникам ложных координат.
88.
Методы подавления помех основаны на ее отличии их от сигнала попространственным и частотным параметрам.
Пространственная селекция возможна при различии направлений прихода
полезного сигнала и помехи. Необходимо наличие специальной антенной
системы или нескольких независимых каналов приема, каждый со своим
приемным устройством, для реализации цифровой диаграммообразующей
схемы.
Адаптивные алгоритмы подавления узкополосных помех используют
режекцию в частотной области. При этом неизбежны некоторые потери в
отношении сигнал-шум. Такая режекция должна выполняться в каждом
приемном канале.
Режекция с помощью БПФ реализуется в частотной области путем разбиения
входной последовательности данных на выборки по N отсчетов с последующим
применением БПФ, пороговой обработки в частотной области и
восстановлением временного сигнала.
С помощью такого алгоритма гармоническая помеха подавляется примерно на
15 дБ.
89.
+Адаптивный
пространственновременной
фильтр
-
+
Адаптивный
пространственновременной
фильтр
-
Вычислитель
навигационных
характеристик
сигнала
90.
к защищаемой АПот УПЧ радиочастотного преобразователя
Буферизация
входных
данных для
БПФ с
перекрытием
Умножение на
сглаживающее
окно
Расчет порога
L
БПФ
на N точек
Пороговая
обработка
дискретного
спектра
ОБПФ
на N точек
Восстановление
исходного темпа
поступления отсчетов
91.
UTC (Universal Time Coordination) – ныне существующая «наследница» среднеговремени по Гринвичу (Greenwich Mean Time, GMT). В нее ввели «дополнительную
секунду». В системе NAVSTAR (GPS) на борту каждого спутника размещено от 2 до 4
атомных часов. Синхронизация бортовых часов космического сегмента системы
осуществляется из наземного центра управления (впрочем, последние серии спутников
NAVSTAR способны синхронизировать время и между собой – на случай сбоев связи с
центром управления).
Для синхронизации шкал времени различных спутников с необходимой точностью на
борту НКА используются цезиевые стандарты частоты с относительной
нестабильностью порядка 10-13. На наземном комплексе управления используется
водородный стандарт с относительной нестабильностью 10-14. Кроме того, в состав
НКУ входят средства коррекции шкал времени спутников относительно эталонной
шкалы с погрешность 3–5 нс.
92.
Контроль целостности радионавигационной информацииСРНС ГЛОНАСС применяется в авиации, при боевых действиях войск, в
морской навигации и т.д., где очень высоки требования к достоверности
навигационной информации. Поэтому большое значение придается контролю
целостности радионавигационного поля. С понятием контроль целостности
радионавигационной информации связано понятие непрерывности зон
видимости НКА. На рис.ХХХ для примера показаны зоны видимости
93.
Контроль целостности радионавигационного поля системы заключается в контролекачества передаваемых НКА радиосигналов и качества передаваемых ими
навигационной информации. Рассмотрим
подробнее
способы
контроля
целостности, применяемые в СРНС ГЛОНАСС.
Самоконтроль на борту НКА
На спутниках системы ГЛОНАСС осуществляется автономный непрерывный
контроль (самоконтроль) функционирования основных бортовых систем. При
обнаружении нарушений нормального функционирования этих систем, которые
влияют на качество излучаемого спутником навигационного радиосигнала и
достоверность передаваемого навигационного сообщения и которые не могут быть
устранены внутренними средствами (например, включением резервного модуля),
на спутнике формируется признак его неисправности, который передается
потребителю системы в составе оперативной информации навигационного
сообщения. Дискретность передачи такого признака составляет 30 с.
Соответственно, максимальная задержка от момента обнаружения неисправности
до момента передачи сообщения об этом не превышает 1 мин. В сигнале спутников
серии Глонасс-М присутствует признак, передаваемый с дискретностью не более 4
с, что позволяет сократить задержку оповещения потребителей до 10 с.
Недостатки этого канала контроля заключаются в его неполноте: средства
самоконтроля не рассчитаны на обнаружение всех возможных нарушений в работе
каждой бортовой системы; неисправности самих средств контроля не
обнаруживаются и не сопровождаются передачей соответствующего сообщения
потребителям; искажение эфемерид не может быть обнаружено на самом спутнике.
94.
Контроль наземными средствамиВ состав наземного комплекса контроля и управления входит специальная
аппаратура контроля поля. При обнаружении непригодности НКА, информация об
этом появляется в альманахе системы не позднее, чем через 16 часов.
Соответствующий признак передается один раз в составе каждого суперкадра,
т.е. дискретность передачи составляет 2,5 мин. В соответствии с двумя
способами контроля радионавигационного поля, в составе служебной
информации каждого НКА системы передаются два типа признаков состояния:
Bn (In) – нулевое значение признака обозначает пригодность данного НКА для
навигационных определений. В скобках указано наименование признака для НКА
Глонасс-М. Признак входит в состав оперативной информации.
Сп – совокупность (n = 1...24) обобщенных признаков состояния всех НКА
системы на момент закладки альманаха. Значение Сп = 0 указывает на
непригодность НКА, имеющего системный номер n, для навигационных
определений. Значение Сп = 1 говорит о пригодности НКА с номером n. Признак
входит в состав неоперативной информации (альманаха).
Время, необходимое для формирования и доставки потребителям признаков Bn
(до 1 мин) значительно меньше, чем для признаков Сп (до 16 ч), но
формирование признаков Сп основано на более глубоком анализе качества
радионавигационного поля. Аппаратура потребителя должна анализировать оба
этих признака и принимать решение о пригодности сигнала конкретного НКА на
их основе. Решающее правило, по которому делается вывод о
работоспособности НКА с точки зрения получения максимальной достоверности,
приведено в таблице 1.
95.
Таблица 1 – Решающее правило при анализе контроля целостностиЗначение Вп(1п)
Значение Сп
Пригодность НКА
0
0
нет
0
1
да
1
0
нет
1
1
нет
До получения данных альманаха, основанных на глубоком анализе, спутник можно считать условно
годнымдаже если признак Сп говорит об обратном. В интерфейсном контрольном документе GPS
NAVSTAR также введено понятие ограниченной пригодности НКА, когда достоверность передаваемой
информации не гарантируется, но потребитель может использовать сигнал НКА исключительно под
свою ответственность. В случае с ГЛОНАСС вариант правила, допускающего условную пригодность,
выглядит так:
Значение Вп(1п)
Значение Сп
Пригодность НКА
0
0
нет
0
1
да
1
0
нет
1
1
условная
96.
Условная пригодность может считаться допустимой для некритичных (например, бытовых)применений, в условиях недостаточного количества доступных спутников. Но, в любом
случае, признак Сп имеет высший приоритет и своим нулевым значением говорит об
однозначной непригодности НКА с номером n.
Указанные методы контроля целостности навигационного поля ГЛОНАСС не всегда
обеспечивают требуемую полноту проверок и своевременность оповещения
потребителей. Известны подходы к решению проблемы контроля целостности, свободные
от недостатков связанных с неприемлемой задержкой в оповещении потребителей. Они, в
частности, предусматривают использование дифференциальных измерений и
своевременного оповещения потребителей об отказах спутников с помощью каналов
связи (например, через дополнительные геостационарные спутники Inmarsat).
Автономный контроль целостности в приемнике потребителя (Receiver Autonomous
Integrity Monitoring – RAIM)
Благодаря избыточности навигационной информации, получаемой приемником
потребителя от рабочего созвездия НКА, потребитель может самостоятельно организовать
контроль качества радионавигационного поля. Как известно, для определения вектора
потребителя, включающего широту, долготу, высоту, вектор скорости и системное время
достаточно созвездия из четырех спутников. При наличии в созвездии хотя бы одного
дополнительного спутника становится возможным провести пять сеансов навигационных
определений, поочередно исключая один из спутников. Для этого в аппаратуре
потребителя должна обеспечиваться возможность не автоматического выбора рабочего
созвездия.
Далее, анализируя результаты определений и сравнивая их между собой, можно сделать
вывод о наличии неисправного НКА, а при большем числе доступных («видимых»)
спутников и определить его номер.
Существует множество разнообразных способов реализации RAIM, отличающихся
статистическим подходом, применяемыми правилами анализа, необходимым числом НКА.
97.
Перспективные направления развития и совершенствования систем радионавигацииРезультаты анализа удовлетворения требований различных групп потребителей
существующими
средствами
радионавигационного
обеспечения
определяют
направления решения основных проблем:
- повышение устойчивости работы, особенно в условиях помех;
- повышение точности определения места объекта;
- повышение доступности радионавигационных систем;
- повышение целостности радионавигационных систем;
- повышение непрерывности обслуживания (функционирования).
Эти проблемы решаются:
- применением космических навигационных систем ГЛОНАСС, GPS, а затем и ГАЛИЛЕО;
- применением дифференциальных подсистем (режимов) и средств контроля
целостности;
- интегрированным использованием различных радионавигационных систем;
- улучшением технических характеристик радионавигационных систем и навигационной
аппаратуры потребителей;
- созданием развитой инфокоммуникационной инфраструктуры, предназначенной для
оказания услуг, формируемых на основе ресурсов координатно-временной и
навигационной информации.
98.
ПоказательГЛОНАСС
GPS NAVSTAR
Beidou 2 (Compass)
Galileo
Число НКА в полной
системе
24
24
35
27
Число орбитальных
плоскостей
3
6
нет данных
3
Число НКА в каждой
плоскости
8
4
нет данных
9
Наклонение орбиты,˚
64,8
55
55,2
56
Высота орбиты, км
19 130
20 180
21 500
23 600
Период обращения
НКА
11 ч 15 мин 44 с
11 ч 58 мин 00 с
нет данных
нет данных
Система координат
ПЗ-90
WGS-84
нет данных
GTRF
Масса НКА, кг
935
1055
2200
700
1600
450
нет данных
нет данных
Срок активного
существования, лет
10
7,5
10–12
10
Средства вывода на
орбиту
Союз-2
Delta 2
CZ-3A
Союз-ФГ
Мощность
солнечных батарей,
Вт
99.
Число НКА,выводимых за один
запуск
1
1
1
1
Космодром
Плесецк
Мыс Канаверал
Сичан
Байконур
Эталонное время
UTC (SU)
UTC (NO)
нет данных
TAI
Метод доступа
FDMA
CDMA
CDMA
CDMA
Несущая частота, МГц
L1
1598,0625–1604,25
1575,42
-
1575,42
L2
7/9 L1
60/77 L1
-
1227,60
L5
-
1176,45
-
1176,45
Е1
-
-
1589,74
1589
Е2
-
-
1561,1
1551
Е5a
-
-
-
1176,45
Е5b
-
-
1207,14
1207,14
Е6
-
-
1268
1278,75
Правосторонняя
Правосторонняя
Правосторонняя
Правосторонняя
М-последовательность
Код Голда
нет данных
нет данных
Поляризация
излучения
Тип ПСП
Число элементов кода
С/А
511
1023
10230
нет данных
Р
51 1000
2,35x1014
10230
нет данных
100.
Скорость кодирования, Мбит/сС/А
0,511
1,023
1,023
нет данных
Р
5,11
10,23
1,023
нет данных
Уровень
внутрисистемных
радиопомех, дБ
-48
-21,6
нет данных
нет данных
Структура навигационного сообщения
Скорость передачи,
бит/с
50
50
50/100
50/100
Вид модуляции
BPSK (Манчестер)
BPSK NRZ
BOC, TMBOC
BPSK, QPSK, BOC
Длина суперкадра,
мин
2,5 (5 кадров)
12,5 (25 кадров)
нет данных
нет данных
Длина кадра, с
30 (15 строк)
30 (5 строк)
нет данных
нет данных
Длина строки, с
2
6
нет данных
нет данных
101.
Анализируя таблицу, можно сказать, что системы имеют много различий. Одноиз них – различие в орбитальной структуре систем. К основным же отличиям
прежде всего следует отнести различия в навигационных сигналах. В то числе
и то, что в GPS, Beidou 2 и Galileo применяется кодовое разделение каналов, а
в ГЛОНАСС – частотное.
Различна структура навигационного сообщения систем ГЛОНАСС и GPS.
Благодаря тому, что длительность суперкадра в СРНС ГЛОНАСС составляет
2,5 мин (в отличие от 12,5 мин для GPS), в ней происходит более быстрое
обновление альманаха.
Орбитальная группировка СРНС ГЛОНАСС построена таким образом, что она
меньше, чем GPS, подвержена влиянию нецентричности поля тяготения
Земли и коррекция положения СРНС требуется намного реже.
Китайская
система
Beidou
2
(Compass)
станет
модификацией
функционирующей в настоящее время системы первого поколения Beidou 1.
С китайского языка «Beidou» переводится как «Большая медведица» –
созвездие, с помощью которого в древности определяли положение Полярной
звезды.
102.
Система BeiDou 1 имеет принципиальное отличие от систем GPS и ГЛОНАСС,поскольку в китайской системе часть спутников располагается на геостационарных
орбитах (постоянно находятся над одной и той же точкой земной поверхности).
Орбиты двух спутников определяются следующими меридианами: 80° и 140°
восточной долготы, орбиты третьего и четвертого спутников можно обозначить как
GEO 110,5°E и GEO 86°E (GEO – геостационарные орбиты). Это позволяет
получать сигналы системы на площади, ограниченной меридианами 70°-140°
восточной долготы и параллелями 5°-55° северной широты. Следовательно,
спутники полностью покрывают территорию Китая и некоторых соседних
государств. Сегмент контроля включает в себя три наземных станции. Система
обеспечивает точность определения координат с погрешностью не более 100
метров, однако при использовании дифференциальных методов разброс может
быть уменьшен до 20 метров.
Еще одним существенным отличием BeiDou 1 является метод определения
координат. Навигатор в китайской системе является не только приемником, но и
передатчиком сигнала. Станция мониторинга через два спутника посылает сигнал
пользователю. Устройство пользователя после получения сигнала посылает
ответный сигнал через оба спутника. Наземная станция по задержке сигнала
рассчитывает географические координаты пользователя, определяет высоту по
имеющейся базе данных и передает сигналы на устройство пользовательского
сегмента. Следовательно, навигаторы для BeiDou 1 более дорогие и массивные,
поскольку служат и для передачи сигналов. При этом число пользователей,
одновременно работающих с системой, ограничено и составляет 150 абонентов.
103.
Система Beidou 2 будет обеспечивать глобальный сервис позиционирования ипредоставлять, как и действующие системы ГЛОНАСС и GPS, два типа
обслуживания: открытые сигналы и сигналы, доступные только для
лицензированных или военных пользователей. Точность определения координат
будет находиться в пределах 10 метров, скорости – 0.2 м/с, а времени – 50
наносекунд. Как указано в таблице спутниковая группировка системы будет
включать 35 спутников, из которых 5 геостационарных спутников и 30 спутников,
движущихся по средним орбитам (среднеорбитальные спутники).
Однако все перечисленные различия систем (кроме запросного режима системы
BeiDou 1) не так важны с точки зрения конечного потребителя при построении
комбинированной аппаратуры или выборе СРНС, так как эти различия
преодолеваются соответствующими алгоритмическими и вычислительными
методами, используемыми в аппаратуре потребителя.
104.
PDOP2= HDOP2+VDOP2GDOP2= PDOP2+TDOP2
Это справедливо и для систем электронного противодействия (electronic warfare),
при
определении
положения
источников
излучения,
таких
как помехопостановщики или средства радиообмена.
З
н
а
ч
е
н
и
е
D
O
P
Точность
Описание
≤
1
Идеальная
Рекомендуется к использованию в системах, требующих максимально возможную
точность во всё время их работы
2
3
Отличная
Достаточная точность для использования результатов измерений в достаточно
чувствительной аппаратуре и программах
4
6
Хорошая
Рекомендуемый минимум для принятия решений по полученным результатам.
Результаты могут быть использованы для достаточно точных навигационных указаний.
7
8
Средняя
Результаты можно использовать в вычислениях, однако рекомендуется озаботиться
повышением точности, например, выйти на более открытое место.
9
2
0
Ниже
среднего
Результаты могут использоваться только для грубого приближения местоположения
Плохая
Выходная точность ниже половины футбольного поля. Обычно такие результаты должны
быть отброшены.
2
1
5
105.
Недостатки GPS, устраняемые технологией A-GPS1) Время первого определения координат зависит от актуальности хранящегося в
приемнике альманаха, который передается сигналом GPS, и от орбитальных
данных (эфемерид). Чем дольше устройство не было активно, тем больше
приёмнику нужно получить информации, прежде чем определение позиции будет
возможным (устройство было неактивно более 2 часов — потребуется около 30
секунд). В зависимости от того, устарели ли альманах и эфемериды, различают
«холодный», «тёплый» и «горячий» старт GPS-приёмника.
2) В условиях города видимость GPS-спутников часто сильно ограничена, а в
закрытых помещениях и туннелях даже невозможна.
3) Относительно высокая потребляемая мощность GPS-приёмника.
Для алгоритмов A-GPS необходим канал связи с удалённым сервером, который
предоставляет информацию для приёмника. Для мобильных устройств этим
каналом чаще всего является интернет-соединение с помощью сотовой
связи либо Wi-Fi.
Определение приблизительного местоположения
Для мобильных телефонов определить приблизительное местоположение можно
по базовым станциям (БС). Точность зависит от плотности установки базовых
станций. Наибольшая плотность станций — в центрах городов. Точность в таких
местах составляет от 20 до 500 метров. При уменьшении плотности, при
ухудшении условий приёма и при увеличении расстояния до вышек точность
снижается. На окраинах городов она составляет 1500—2000 метров.
106.
Термин A-GPS (Assisted GPS) означает режим работы GPS-приемника, вкотором часть необходимой для производства расчетов и определения
местоположения информации (альманах, эфемериды, приблизительная оценка
доплеровского сдвига) передается GPS-приемнику по дополнительному каналу,
например через GPRS. Кроме того, провайдер предоставляющий A-GPS сервис
может принимать спутниковые данные с GPS устройства клиента, обрабатывать
их и возвращать готовые координаты. Могут быть и другие варианты
использования данной технологии, но это уже зависит от провайдера (оператора)
предоставляющего услугу A-GPS.
107.
Чтобы воспользоваться услугой A-GPS, нужно, чтобы эта технологияподдерживалась оператором сотовой связи, так как обмен данных
осуществляется через наземные беспроводные сети. В связи с этим, как
правило, A-GPS не является бесплатной услугой. Стоимость зависит от
конкретного оператора и региона. Сервис может предоставляться бесплатно с
оплатой через Интернет мобильной сети оператора, один сеанс связи примерно
5…6 Кб в обе стороны.
Основным плюсом технологии A-GPS является улучшенное время TTFF* и более
высокая скорость позиционирования, т.к. для расчёта координат и загрузки
спутниковых данных (альманах, эфемериды и т.п.) требуется гораздо меньше
времени. Ещё одно преимущество использования A-GPS это экономия энергии,
что увеличивает время автономной работы навигационного устройства.
По сути A-GPS представляет собою программную надстройку над GPSприемником, которая значительно уменьшает время поиска спутников при
холодном старте. Кроме того, эта надстройка позволяет увеличить точность
определения местонахождения в зонах со слабым сигналом от спутников.
* TTFF (Time To First Fix ). Время до первого местоопределения. Время,
которое затрачивается приемником GPS от момента его включения до
первой выдачи координат.
108.
Существуют две технологии A-GPS:A-GPS Online, эта технология позволяет получать по наземным каналам
координаты спутников каждый раз, когда необходимо быстро определить
свои координаты. Каждый раз, если приемник не работал более 2 часов
(холодный старт ).
A-GPS Offline, эта технология позволяет получать по наземным каналам
координаты спутников только один раз в 15 дней и использовать их каждый
раз когда необходимо определить координаты после длительного
выключения (более 2 часов). В модуль GPS встраивается математическая
модель движения спутников и GPS приемник после получения координат по
наземным каналам, корректирует эту модель движения спутников, что
позволяет предсказывать координаты спутников на следующие 15 дней.
Предсказание на больший срок, резко понижает точность определения
координат.
109.
WAAS (wide area augmentation system - широкозонная система функциональногодополнения) — система распространения поправок к данным, передаваемым
навигационной системой GPS. Разработана американской организацией FAA
(Federal Aviation Administration); первым подрядчиком была компания Raytheon.
Действует на территории Северной Америки. Дополняет GPS, повышая точность
определения координат. Создавалась в первую очередь для определения
положения воздушного судна во время посадки. Введена в 2004 г.
Международная организация гражданской авиации (ICAO) именует системы
подобного типа аббревиатурой SBAS от satellite based augmentation system. В
Европе и Азии созданы и функционируют системы, построенные по тем же
принципам, что и WAAS.
Сеть наземных станций измеряет сигналы GPS и передаёт центральным
станциям. Центральные станции вычисляют поправки и передают спутникам.
Спутники ретранслируют поправки обратно на Землю. GPS-приёмники,
поддерживающие WAAS, получают поправки и корректируют координаты,
полученные от GPS.
Система WAAS обеспечивает погрешность не более 1 м по горизонтали и не
более 1,5 м по вертикали. Такая точность выше точности курсо-глиссадной
системы (ILS) 1-й категории (погрешность ILS 1-й категории должна быть не
более 16 м по горизонтали и 4 м по вертикали).
Согласно спецификации WAAS время обнаружения ошибки и сообщение о
получении неправильных данных от GPS и/или WAAS в течение 6,2 с. Вероятность
того, что ошибка в определении координат превысит критическое значение и
останется незамеченной, составляет 1 × 10−7; это эквивалентно получению
неправильных координат в течение времени, не превышающем 3 секунд в году.
110.
Доступность — вероятность удовлетворения требований и по точности, ицелостности. Спецификация WAAS требует, чтобы доступность в зоне
обслуживания составляла 99,999 %; это эквивалентно недоступности на время не
более 5 минут в год.
Состав:
станции WRS — станции, собирающие данные GPS и WAAS; WRS от англ. widearea reference stations;
станции WMS — станции, обрабатывающие данные; WMS от англ. widearea master stations;
станции GUS — станции, отправляющие данные спутникам; GUS
от ground uplink stations.
Станции WRS расположены на всей территории северной америки. По данным на
октябрь 2007 года насчитывалось 38 станций:
20 в США (кроме Аляски);
7 на Аляске;
одна на Гавайях;
одна в Пуэрто-Рико;
5 в Мексике;
4 в Канаде.
EGNOS (European Geostationary Navigation Overlay Service) — европейская
геостационарная служба навигационного покрытия. EGNOS предназначена для
улучшения работы систем GPS, ГЛОНАСС и Galileo на территории Европы и
является аналогом американской системы WAAS.
111.
MSAS (Multi-functional Satellite Augmentation System) — многофункциональнаясистема дополнения спутникового базирования, принадлежащая Японии. MSAS
является частной реализацией подсистемы SBAS для целей позиционирования и
располагается на экваторе в районе Японии. Система позволяет значительно
увеличить точность определения положения и времени при использовании GPS.
Используется в авиации с 2007 года.
112.
Перспективы развития аппаратуры потребителейДальнейшее развитие НАП в части специализации связывается с расширением областей ее
применения:
- обеспечение транспортных средств (как военного, так и гражданского назначения);
- обеспечение систем управления и идентификации (военного и гражданского назначения);
- проведение топогеодезических и картографических работ;
- синхронизацию систем связи, например, автоматических идентификационных систем (АИС) и др.;
- землеустроительные и другие "кадастровые" работы, мониторинг состояния земной коры;
- обеспечение систем сотовой связи и выставки (коррекции) часов;
- геологоразведочные работы и функционирование топливно-энергетического комплекса;
- строительство и контроль протяженных и высотных сооружений;
- работы в протяженных и глубоких карьерах и в других горнодобывающих предприятиях;
- обеспечение систем стабилизации частоты электроэнергетических систем;
- обеспечение точной агротехники, например, при возделывании и обработке угодий, а также при
обработке посевов ядохимикатами;
- сопряжение с аппаратурой всемирной системы спасения терпящих бедствие объектов (ГМССБ);
- обеспечение информационно-навигационных систем и комплексов;
- ГИС-технологии.
Расширение функциональных возможностей:
- выработка углов пространственной ориентации, поправок системы курсоуказания, меток времени;
- обеспечение возможности комплексирования аппаратуры с автономными навигационными
системами объекта;
- обеспечение возможности взаимодействия аппаратуры с автоматизированными информационными
системами и системами управления движением.
Специализация аппаратуры по следующим типам:
- военная (высокий уровень ТТХ, выполнение военных стандартов в полном объеме, надежность,
помехозащищенность);
- общего назначения (уровень ТТХ может снижаться за счет снижения стоимости);
- специальная (уровень ТТХ, необходимый для выполнения специальных задач).
Создание унифицированного ряда функциональных элементов, узлов, блоков.
113.
Снижение уязвимостирадионавигационных систем
Уязвимость РНС определяется следующими факторами:
влиянием непреднамеренных и преднамеренных помех,
возникновением системных отказов,
возможностью физического поражения элементов систем (КА, наземных средств, линий
связи).
Предварительная оценка показывает, что для наземных РНС наибольшую угрозу
представляет физическое поражение наземного оборудования, в первую очередь антенных систем, имеющих наибольшие размеры, высоту или протяженность. Для
приемных радиосредств длинноволнового и средневолнового диапазонов существенную
угрозу представляют атмосферные помехи, помехи, обусловленные электризацией
корпуса самолета и т.д.
Для ГНС наибольшую угрозу представляют преднамеренные и непреднамеренные
помехи навигационной аппаратуре потребителей, поскольку мощность принимаемых
сигналов очень мала и находится на уровне -160 дБВт ...-161 дБВт. Воздействия помех
могут быть по каналам ГЛОНАСС, GPS, ГАЛИЛЕО, EGNOS, MSAS и локальных ДПС типа
GBAS.
Целесообразно использовать комбинацию методов, способов и путей снижения
уязвимости.
В качестве одного из важнейших методов защиты от помех КНС ГЛОНАСС следует
рассматривать расширение состава частот сигналов. Такие усилия предприняты, в
частности, применительно к GPS и ГАЛИЛЕО, посредством ввода сигналов в диапазонах
L2 и L3 ГЛОНАСС, L1C и L5 GPS.
При этом необходима интеграция ГНС ГЛОНАСС и GPS, а также наземных систем на
уровне НАП.
Второй метод также предполагает реализацию средств защиты от помех в бортовой
спутниковой аппаратуре. Это обусловлено тем, что наземные средства могут быть
недостаточно надежными и оперативными. Он связан с существенным изменением
взглядов на спутниковую аппаратуру как на нечто абсолютно надежное и "неподвижное"
и предполагает:
114.
Приложения115.
Глосса́рийОсновные термины и аббревиатуры, используемые при изучении курса
«Спутниковая радионавигационная система ГЛОНАСС»
ГЛОНАСС – ГЛОбальная НАвигационная Спутниковая Система.
(Acquisition Time)
Время, необходимое аппаратуре потребителя для выбора группы спутниковых
сигналов, используемых при первоначальном позиционировании. В
последующем позиционирование осуществляется циклически.
Альманах (Almanac Data)
Данные о текущем состоянии всей навигационной системы, включающие
эфемериды и применяемые в аппаратуре потребителя при поиске и
оптимальном выборе группы спутников, которые используются в приемнике
GPS для быстрого поиска и "захвата" сигналов спутников. Обновленная
наземной станцией загрузки версия альманаха действительна в течение 28
суток.
Anywhere Fix
Автономный старт в произвольном месте
Способность приемника GPS начинать прием спутниковых сигналов и
вычисление местоположения объекта, без предварительного ввода в него
ориентировочных значений координат.
Код свободного доступа (C/A Code - Clear/Acquisition Сode)
116.
Принятыйв
GPS
код,
представляющий
собой
псевдослучайную
последовательность из 1023 бистабильных манипуляций фазы несущей частоты
сигнала спутника с частотой следования 1,023 МГц. Иногда называется “civilian
code” (гражданский код).
Carrier (англ.: несущая)
Излучаемый спутником высокочастотный сигнал.
Carrier-Aided Tracking
Слежение с использованием несущей.
Метод захвата и точного отслеживания псевдослучайного кода, основанный на
использовании свойств несущего сигнала.
Carrier Frequency (англ.: несущая частота)
Несущая частота немодулированного сигнала радиопередатчика спутника.
Clock Bias
Погрешность в показаниях часов по отношению к единому системному времени
спутниковой навигационной системы.
Control Segment
Наземный сегмент управления.
Cycle Slip
Потеря цикла
Нарушение непрерывности слежения за фазой несущей частоты в результате
временного сбоя в контуре слежения приемника GPS.
Data Message
Информационное сообщение, содержащее данные о местоположении спутника,
117.
Differential PositioningДифференциальное местоопределение
Определение координат одного приемника GPS по отношению к другому, базовому,
координаты места которого известны с большой точностью. Позволяет устранить
целый ряд методических погрешностей местоопределения и получить более точные
координаты.
Dilution of Precision – DOP - «снижение точности»
HDOP (Horizontal Dilution of Precision) — снижение точности в горизонтальной плоскости
VDOP (Vertical) — снижение точности в вертикальной плоскости
PDOP (Position) — снижение точности по местоположению
TDOP (Time) — снижение точности по времени
GDOP (Geometric) — суммарное геометрическое снижение точности по местоположению и времени
Geometric Dilution of Precision – GDOP Геометрический фактор снижения
точности, определяемый как коэффициент увеличения погрешности
позиционирования, связанный с неоптимальностью расположения рабочего
созвездия спутников на небесной сфере (в технической литературе для
обозначения геометрического фактора употребляется аббревиатуры DOP или
GDOP.
Doppler Shift
Доплеровский сдвиг или разность частот принятого и излученного сигналов,
пропорциональная скорости взаимного сближения (удаления) приемника и
передатчика.
Doppler-Aiding
Доплеровская "поддержка" (дополнение), связанное с использованием
измерения доплеровского сдвига несущей частоты спутниковых сигналов для
повышения точности измерения координат и скорости.
118.
Ephemeris DataЭфемеридные данные, передаваемые спутником в его навигационном
сообщении и используемые в аппаратуре потребителя для вычисления точных
координат спутника. (Набор эфемеридных данных «устаревает» через
нескольких часов).
G-GIWG - GPS-Glonass Interoperability Working Group
Рабочая группа по обеспечению взаимодействия систем GPS и «ГЛОНАСС»,
учрежденная институтом навигации ION (Institute of Navigation) в 1996 году.
GNSS - Global Navigation Satellites System
Глобальная Навигационная Спутниковая Система.
Термин, используемый для спутниковых систем позиционирования независимо
от их принадлежности.
GPS - Global Positioning System
Глобальная Система Позиционирования.
Термин первоначально использовался для любых спутниковых систем
позиционирования. В настоящее время используется применительно к
американской системе NAVSTAR.
Handover word
Слово "контакта" ("перехода").
Кодовое слово в информационном сообщении спутника, которое управляет
переходом от режима слежения за С/А-кодом к режиму слежения за Р-кодом.
Ionosphere (англ.: ионосфера)
Слой электрически заряженных частиц на высотах от 50 до 1000 километров над
поверхностью Земли.
119.
Ionospheric Refraction (англ.: ионосферная рефракция)Изменение скорости распространения радиосигнала при прохождении его через
ионосферу.
L-Band
L-полоса частот радиосигналов
Полоса радиочастот в диапазоне от 390 до 1550 МГц, содержащая и несущие
частоты спутников GPS: L1=1575,42 МГц и L2=1227,6 МГц.
Multi-Channel Receiver (англ.: многоканальный приемник)
Приемник GPS, который может одновременно отслеживать сигналы более, чем
одного спутника.
Multipath Error (англ.: ошибка многолучёвости)
Погрешность местоопределения, вызванная наложением на основной сигнал еще
и сигналов, отраженных от земной поверхности, предметов и объектов,
окружающих антенну приемника.
Multiplexing Channel (англ.: мультиплексный канал) – переключаемый канал
приемника GPS, который может быть запрограммирован на прием сигналов
разных спутников.
Navigation Message Навигационное сообщение – информационный сигнал,
формируемый на борту космического аппарата на основе данных, получаемых от
наземного комплекса управления и структурированный в виде строк, кадров и
суперкадров. Навигационное сообщение содержит альманах, эфемеридную
информацию и другую служебную информацию.
NAVSTAR - NAVigation Satellites providing Time And Range
Измерение времени и расстояния от навигационных спутников.
120.
P-CodeP-код защищенный (Protected) он же одновременно и точный (Precision) код.
Очень длинная базовая последовательность псевдослучайных бистабильных
манипуляций фазы несущей частоты с частотой следования, равной 10,23 МГц и
периодом повторения в 267 суток. Любой недельный сегмент этого кода является
уникальным для одного из спутников GPS и непрерывно генерируется им в
течение каждой недели, начиная с ночи с субботы на воскресенье.
PPS - Precise Positioning Service ( англ.: Служба точного местоопределения)
Предлагаемые средства GPS и возможности наиболее точного динамического
местоопределения, основанного на применении P-кода и двухчастотной передачи
дальномерных кодов и информационных сообщений.
Pseudolite (англ.: псевдоспутник)
Размещенное в фиксированной точке на Земле устройство, которое излучает
сигналы аналогично действующим спутникам и может быть использовано для
местоопределения.
Pseudo-Random Code (англ.: псевдослучайный код)
Шумоподобный
непрерывный
сигнал,
состоящий
из
периодических,
определенным образом составленных кодовых последовательностей логических
нулей и единиц, имеющий статистические характеристики, сходные с
характеристиками случайных шумов.
Pseudorange (англ.: псевдодальность)
Расстояние (дальность) до спутника, полученное в приемнике на основе
корреляции принятого и бортового кодов без коррекции ошибок синхронизации
часов.
121.
RTCM - Radio Technical Commission for Maritime ServicesРадиотехническая комиссия морских служб, разработавшая протокол передачи
дифференциальных поправок, который иногда обозначают той же аббревиатурой.
Satellite Constellation (англ.: созвездие спутников).
Конфигурация группы спутников GPS в космическом пространстве.
Search The Sky – (англ.: поиск, "осмотр небосвода").
Экранное сообщение приемника GPS, выполняющего поиск спутниковых сигналов
и считывание альманаха из навигационного сообщения первого "найденного"
спутника. Данные альманаха в свою очередь используются для быстрого поиска
сигналов остальных спутников созвездия.
Space Segment
Космический сегмент
Часть всей GPS, находящаяся в космическом пространстве, т.е. спутники.
SPS - Standard positioning service
Служба обычного местоопределения
Предлагаемые средства GPS и возможности местоопределения, основанного на
применении гражданского С/А-кода и одночастотной передачи дальномерных и
информационных сообщений.
Start (англ.: старт)
Процесс
выхода
приемника
GPS
на
рабочий циклический
режим
местоопределения с момента включения питания до момента первого
местоопределения. Для старта (и основного режима) процессор приемника
использует данные альманаха, которые остаются действительными в его памяти
в течение 28 суток, считая от последнего их обновления наземной станцией,
исходное местоположение, т.е. приближенные координаты местоположения на
122.
момент включения питания, системное время, которое содержится внавигационных сообщениях спутников, эфемеридные данные, которые содержатся
в навигационных сообщениях спутников и остаются действительными в течение
одного-двух часов. В зависимости от полноты и качества перечисленной выше
исходной информации в памяти приемника на момент включения питания
различают нижеследующие виды старта.
Cold start– «холодный старт». Состояние приемника после включения питания (при
его длительном отключении), в котором осуществляется поиск навигационных
сигналов при априорно неизвестных данных об эфемеридах спутников и
альманахе.
Hot start – «горячий старт» (или Warm start – «теплый старт»). Состояние
навигационного приемника вновь включенного после отключения питания. При
этом данные об эфемеридах, альманахе и времени сохраняются и за счет этого
время первоначального определения местоположения значительно меньше, чем
при «холодном старте». Определение аналогично Reacquisition – восстановление
режима местоопределения.
TehnoStart – технологический старт. Исходная информация в памяти приемника
отсутствует, но возможно ускорение подготовки приемника к циклическому
рабочему режиму при загрузке исходной информации из памяти внешнего
источника. Далее процессор приемника выполняет поиск спутниковых сигналов
перебором значений фаз несущей и дальномерного кода в рамках двумерной
таблицы их возможных значений. При обнаружении сигналов любого из спутников
приемник переходит в режим слежения (автоматической настройки) за ними и
считывания недостающей информации из его навигационного сообщения.
123.
Static PositioningСтатическое местоопределение
Определение координат местоположения, когда во время измерений антенна
приемника неподвижна по отношению к земле. В этих случаях, используя
различные методы статистической обработки результатов, точность определения
координат можно существенно повысить.
TTFF - Time To First Fix
Время до первого местоопределения
Время, которое затрачивается приемником GPS от момента его включения до
первой выдачи координат.
User Interface (англ.: пользовательский интерфейс)
Способ и средства, с помощью которых пользователь считывает информацию и
осуществляет настройку и управление приемником.
User Segment
Пользовательский сегмент
Совокупность пользовательских приемников любых принадлежности и назначения
как часть всей системы спутниковой навигации.
UTC (SU)
Шкала времени Государственного эталона частоты и времени России. Не
является непрерывной шкалой вследствие её периодической секундной
коррекции. Последняя коррекция на 9 мкс была произведена 26.11.96, при этом
расхождение между UTC (SU) и UTC снизилось до 1 мкс.
124.
UTC - Universal Time CoordinatedВсемирное координированное время.
Международная система высокоточного определения среднего времени по
гринвичскому меридиану, учитывающая сезонные изменения скорости вращения
Земли.
UTM (Universal Transverse Mercator) (Расшифровано)
Универсальная поперечная проекция Меркатора (картографическая). В России и
странах СНГ применяется ее частный случай – проекция Гаусса-Крюгера.
WAAS - Wide Area Augmentation System
Глобальная система с расширенными данными. В навигационный сигнал включена
информация о целостности ОГ, а также точные поправки для всех видимых
спутников и другие сведения, необходимые для решения навигационных задач,
которые связаны с прецизионной посадкой воздушных судов.
WAGE - Wide Area GPS Enhancement
Повышение точности данных системы GPS в глобальной зоне.
СПИСОК РЕКОМЕНДОВАННОЙ ЛИТЕРАТУРЫ
1.Бакулев П.А., Сосновский А.А. Радионавигационные системы. – М.: Радиотехника,
2005. – 224 с.
2.Радиотехнические системы. Учебник / Под ред. Ю.М. Казаринова , М. : ACADEMA,
2008, 589 с.
3.Соловьев Ю.А. Системы спутниковой навигации. М.: Эко-Трендз, 2000.
4.Глобальная спутниковая радионавигационная система ГЛОНАСС / Под ред. А.И.
Перова и В.Н. Харисова: М. «Радиотехника», 2009. 688с.
5.Липкин И.А. Спутниковые навигационные системы. М.: Вузовская книга, 2001.
125.
Пересчет географических координат широты и долготы в линейные расстоянияДлина меридиана - 40 000 км. Тогда: 1 градус составляет 1/360 часть длины меридиан.
40 000/ 360 = 111.111 км.
1 минута составляет 1/60 часть 1 градуса и равна 111.111/60 = 1 852м. 1сек=30,87 м.
Для расчета широты справедливо:
(2 x π x R x (1-cos89) )/360, где R - радиус Земли
Если точки лежат на одном меридиане, тогда 1 градус равен примерно 111 км, т.е. разность в
градусах широт умножаем на 111 км.
В общем случае, чтобы вычислить расстояние нужно знать угол между двумя радиусами,
проведенными в каждую из этих двух точек из центра Земли.
Угловое расстояние между двумя точками равно:
arccos {(sin(широта1)• sin (широта2) + cos (широта1) •cos (широта2)•cos (долгота1 - долгота2)}
полученный угол умножаем на радиус Земли 6400 км и получаем ответ.
Все углы (широта и долгота) в формуле измеряются в радианах.
Другой способ предложен Чебышевым.
Для определения расстояния между двумя точками на земной поверхности разности широт и
долгот двух мест, надо выразить в дуговых минутах; удвоить разность широт; большее из
двух полученных чисел удвоенной разности широт и разности долгот умножить на 7, а
меньшее на 3; произведения сложить; полученную сумму разделить на 8; тогда и найдем,
сколько верст между данными точками.
1 км = 15/16 версты.
dN 1min= 30.9 m
dE 1 min= 19m
126.
Существует три способа расчета сферического расстояния большого кругаСферическая теорема косинусов
В случае малыхеньких расстояний и небольшой разрядности вычисления
(количество знаков после запятой), использование формулы может приводить к
значительным ошибкам связанным с округлением. - широта и долгота двух точек в
радианах
- разница координат по долготе
- угловая разница
Для перевода углового расстояния в метрическое, нужно угловую разницу
умножить на радиус Земли (6372795 метров), единицы конечного расстояния
будут равны единицам, в которых выражен радиус, т.е. в метрах.
Формула гаверсинусов
Используется, чтобы избежать проблем с небольшими расстояниями.
Модификация для антиподов
Предыдущая формула также подвержена проблеме точек-антиподов, чтобы ее
решить используется следующая ее модификация.
127.
128.
Список рекомендуемой литературы1.Бакулев П.А., Сосновский А.А. Радионавигационные системы. – М.: Радиотехника, 2005. –
224 с.
2.Радиотехнические системы. Учебник / Под ред. Ю.М. Казаринова , М. : ACADEMA, 2008,
589 с.
3.Соловьев Ю.А. Системы спутниковой навигации. М.: Эко-Трендз, 2000.
4.Глобальная спутниковая радионавигационная система ГЛОНАСС / Под ред. А.И. Перова и
В.Н. Харисова: М. «Радиотехника», 2009. 688с.
5.Липкин И.А. Спутниковые навигационные системы. М.: Вузовская книга, 2001.
6. Бао-Йен Приёмники GPS. Программно-ориентированный подход
7. Бор К., Акос Д. Программируемый приемник GPS и GALILEO. Одночастотный подход
8. Карасёв В.В. Современные спутниковые радионавигационные системы
9. Конин В.В. Спутниковые навигационные системы и технологии
10. Конин В.В., Конина Л.А. Спутниковые системы навигации. Учебное пособие.
11. Интерфейсный контрольный документ ГЛОНАСС. 2002
12. Корнеев И., Немудров В. Специализированная СнК навигационного приёмника
ГЛОНАСС-GPS
13. Мосиенко С., Корнеев И. Модули навигационных приёмников: проблемы и перспективы
14. Поваляев Е., Хуторной С. Системы спутниковой навигации ГЛОНАСС и GPS
15. Самков И.Ю. Программные модули ГЛОНАСС/GPS/Galileo: достоинства и перспективы
16. Скобелин А.А., Бандура А.С. Способ формирования сигналов СНС ГЛОНАСС
17. Соловьёв Ю.А. Системы спутниковой навигации
18. Харисов В.Н., Перов А.И. Глобальная спутниковая радионавигационная система
ГЛОНАСС
19. Шабшаевич В.С. Сетевые спутниковые радионавигационные системы
20. Яценков В.С. Основы спутниковой навигации