








 Механика
МеханикаПохожие презентации:










Зубчатые передачи
1.
Детали механизмов имашин
Лекция № 3
Доцент кафедры основ конструирования машин
кандидат технических наук
Барманов Ильдар Сергеевич
2.
ЗУБЧАТЫЕ ПЕРЕДАЧИ2
3.
ПРЕИМУЩЕСТВА И НЕДОСТАТКИДостоинства:
– Высокая нагрузочная способность (передаваемая мощность);
– Малые габаритные размеры;
– Высокая надёжность;
– Высокий КПД ~ 97-99 %;
– Постоянное передаточное отношение;
– Простота в эксплуатации;
– Технологичность изготовления.
Недостатки:
– Вибрация и шум при высоких окружных скоростях и низкой степени
точности изготовления;
– Высокий коэффициент жёсткости зацепления;
– Сложность в изготовлении при высокой степени точности и твёрдости
поверхности зубьев.
3
4.
КЛАССИФИКАЦИЯ ЗУБЧАТЫХ ПЕРЕДАЧ1. По скорости:
- тихоходные V 3 м/с;
- быстроходные 3 < V 15 м/с;
- скоростные V > 15 м/с.
3. По направлению зуба:
- с прямым зубом (прямозубые);
- с косым зубом (косозубые);
- с круговым зубом.
2. По форме колеса:
- цилиндрические;
- конические.
4. По расположению осей вращения:
- с параллельными осями вращения;
- с пересекающимися осями вращения;
- с перекрещивающимися осями вращения.
4
5.
ЭВОЛЬВЕНТНОЕ ЗАЦЕПЛЕНИЕЭвольвентный профиль зуба
обеспечивает:
1. Постоянное передаточное
отношение;
2. Постоянное направление
силы, действующей на зуб;
3. Взаимозаменяемость колёс и
работоспособность при
изменении межосевого
расстояния.
5
6.
ЭВОЛЬВЕНТА И ЕЁ СВОЙСТВАЭвольвента – кривая,
описываемая точкой А,
лежащей на прямой, которая
обкатывается по окружности
без скольжения.
Свойства:
1. Нормаль к эвольвенте в
любой точке является
касательной к основной
окружности;
2. Длина отрезка нормали
равна длине дуги окружности;
3. Центром кривизны
эвольвенты является точка
касания нормали и основной
окружности.
6
7.
УРАВНЕНИЕ ЭВОЛЬВЕНТНОЙ ФУНКЦИИAC BC
AC AOC Rb Rb
tan
BC BC
OC Rb
BC Rb tan
Rb Rb tan
tan
inv tan
7
8.
ГЕОМЕТРИЯ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯNN – линия зацепления
W – полюс зацепления
W – угол зацепления
db – диаметр основной
окружности
da – диаметр вершин
зубьев
df – диаметр впадин
зубьев
d – делительный
диаметр
aw – межосевое
расстояние
c – радиальный зазор
P – окружной шаг по
делительной
окружности
Pb – окружной шаг по
основной окружности
8
9.
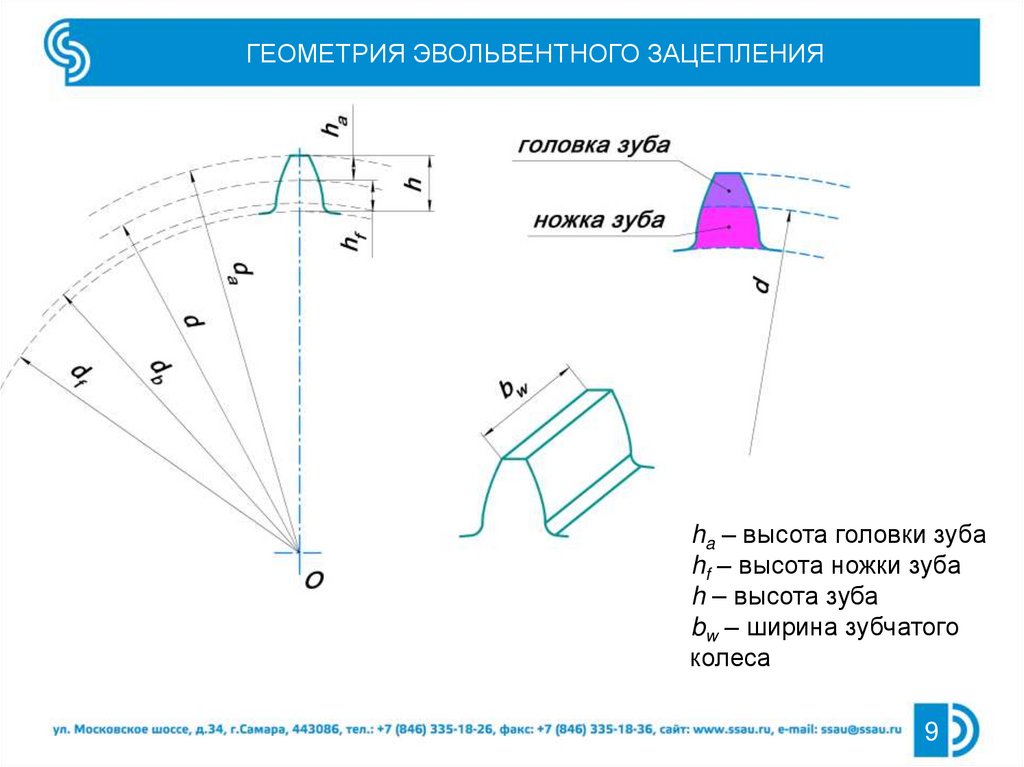
ГЕОМЕТРИЯ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯha – высота головки зуба
hf – высота ножки зуба
h – высота зуба
bw – ширина зубчатого
колеса
9
10.
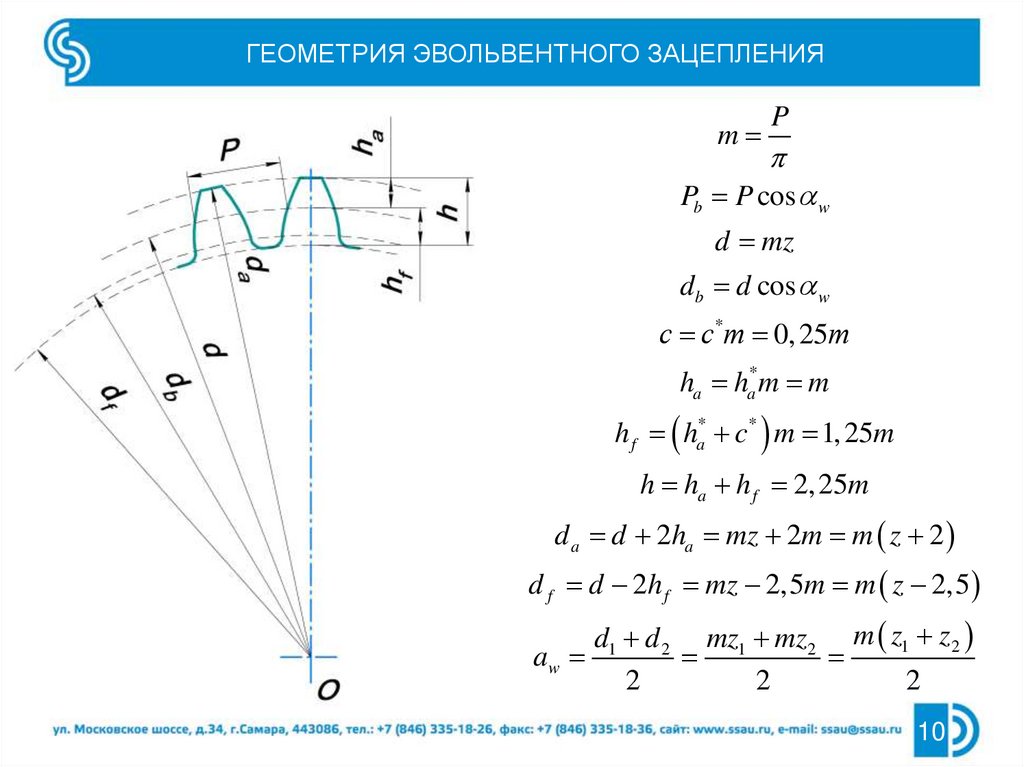
ГЕОМЕТРИЯ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯm
P
Pb P cos w
d mz
d b d cos w
с с*m 0, 25m
ha ha*m m
h f ha* c* m 1, 25m
h ha h f 2, 25m
d a d 2ha mz 2m m z 2
d f d 2h f mz 2,5m m z 2,5
aw
d1 d 2 mz1 mz2 m z1 z2
2
2
2
10
11.
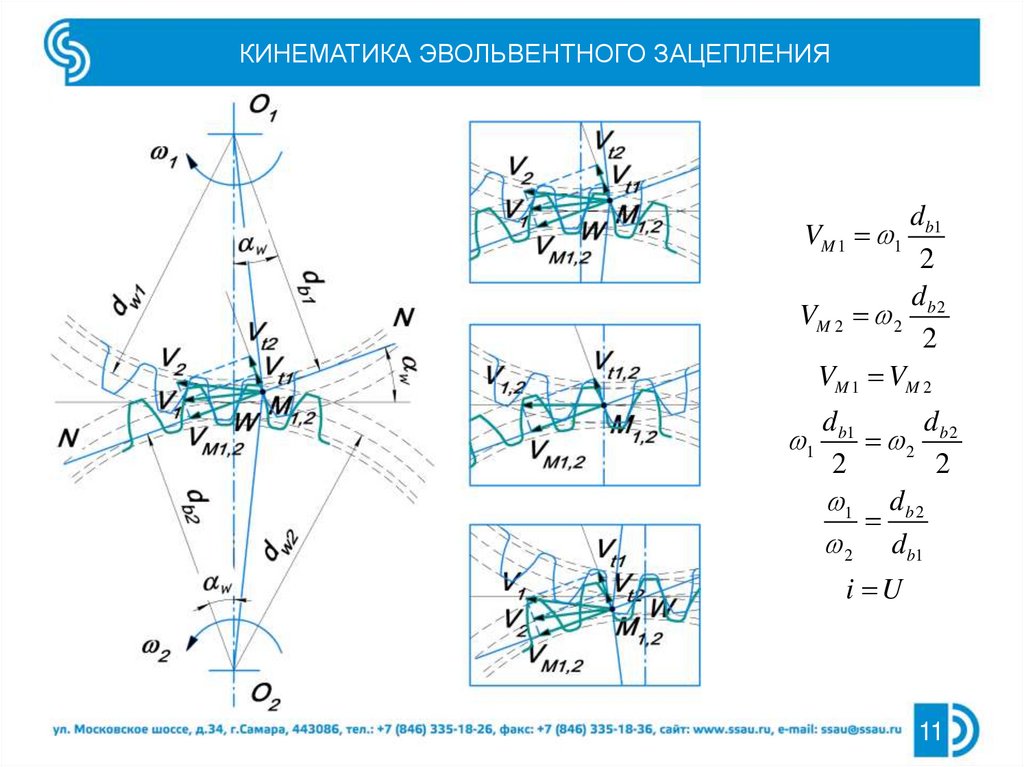
КИНЕМАТИКА ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯd b1
VM 1 1
2
db 2
VM 2 2
2
VM 1 VM 2
d b1
db 2
1
2
2
2
1 db 2
2 db1
i U
11
12.
СКОРОСТЬ СКОЛЬЖЕНИЯVS Vt 2 Vt1
VS 0
VS 0
VS 0
12
13.
ПЕРЕДАТОЧНОЕ ОТНОШЕНИЕ ПРОСТЫХ СТУПЕНЕЙdb 2
d w2
1
n1
d2
mz2
z2
i
U
2
n2
db1
d w1
d1
mz1
z1
z2 z3 z3
i i1i2
z1 z2 z1
z2 z4 z2 z4
i i1i2
z1 z3 z1 z3
13
14.
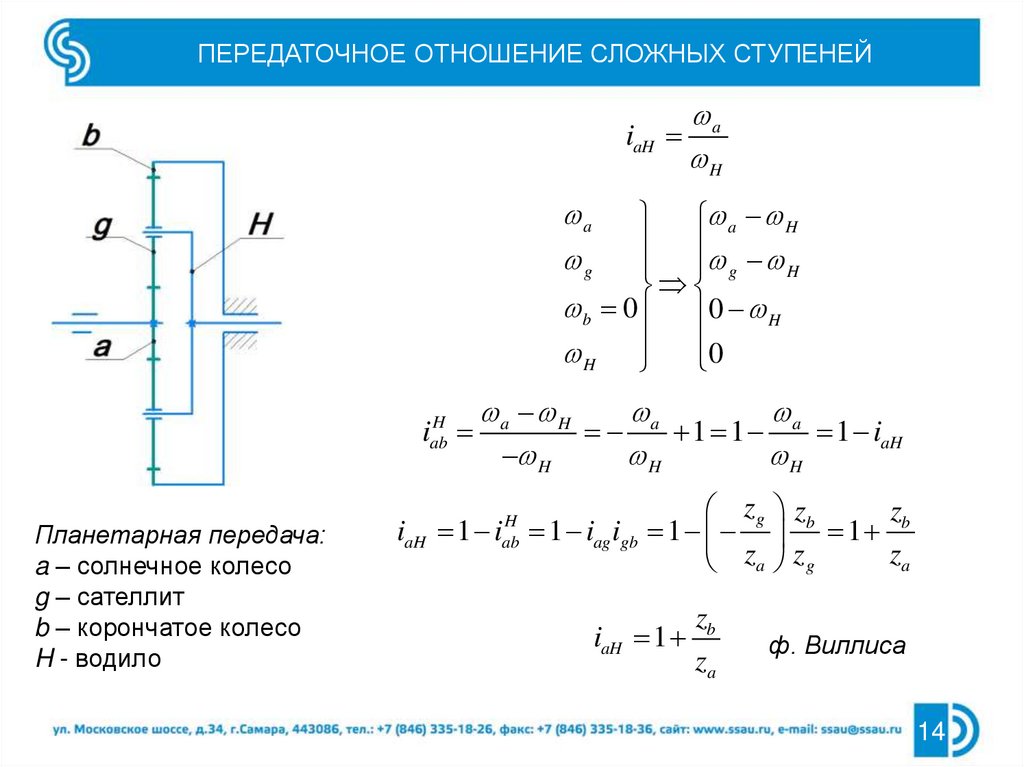
ПЕРЕДАТОЧНОЕ ОТНОШЕНИЕ СЛОЖНЫХ СТУПЕНЕЙiaH
a
H
a
g
a H
g H
b 0 0 H
H 0
iabH
Планетарная передача:
a – солнечное колесо
g – сателлит
b – корончатое колесо
H - водило
iaH
a H
a 1 1 a 1 iaH
H
H
H
zg
1 i 1 iag igb 1
za
H
ab
iaH 1
zb
za
zb
zb
1
za
zg
ф. Виллиса
14