


 Биология
БиологияПохожие презентации:










Биомеханика опорно-двигательного аппарата человека. Биофизика мышечного сокращения
1.
Лекция 318. 02. 2017
Биомеханика опорно-двигательного аппарата (ОДА)
человека.
Биофизика мышечного сокращения.
2.
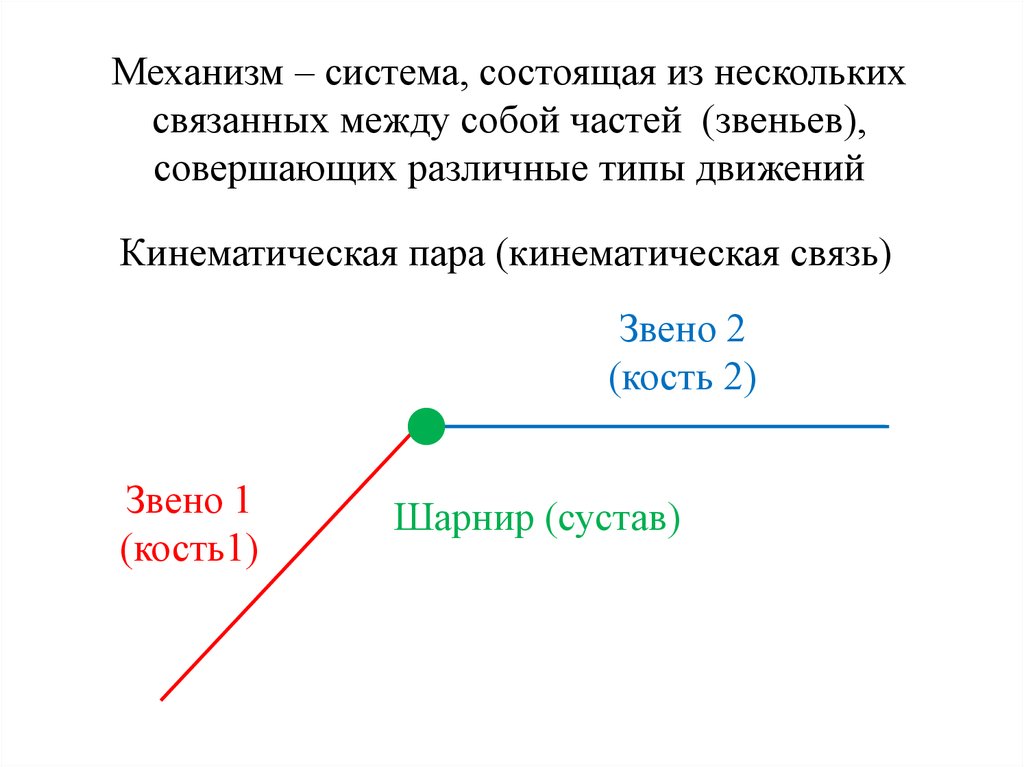
Механизм – система, состоящая из несколькихсвязанных между собой частей (звеньев),
совершающих различные типы движений
Кинематическая пара (кинематическая связь)
Звено 2
(кость 2)
Звено 1
(кость1)
Шарнир (сустав)
3.
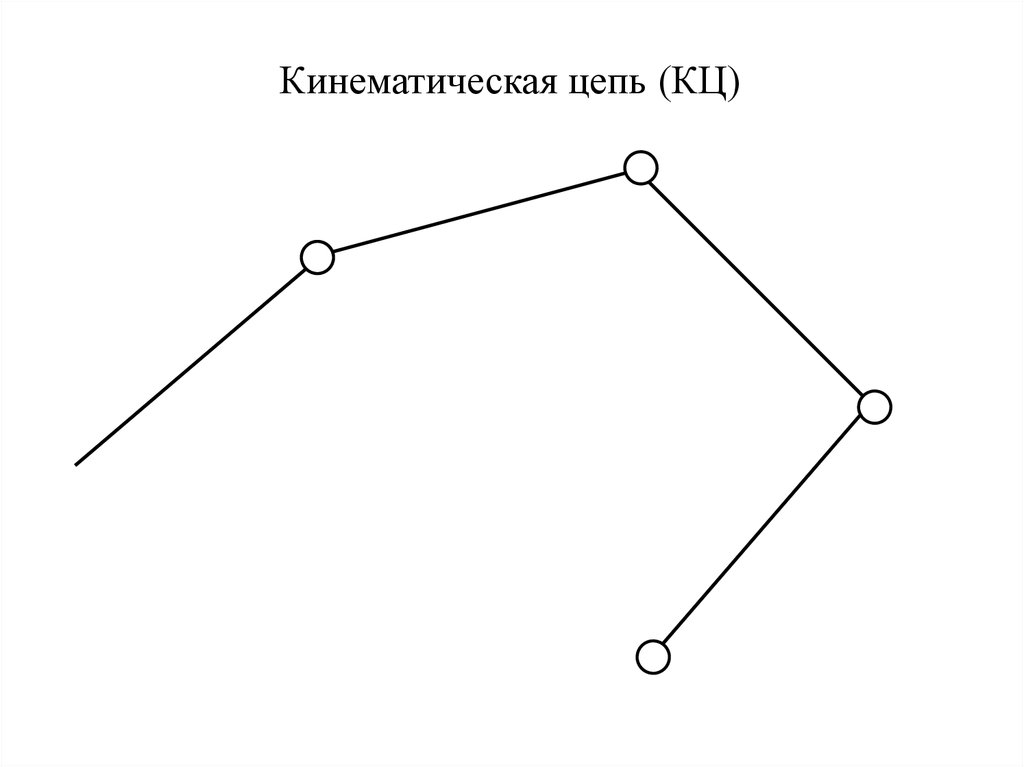
Кинематическая цепь (КЦ)4.
Число степеней свободы механизма – числонезависимых координат, необходимых
для определения положения всех звеньев механизма
или число независимых движений, на которые
раскладываются движения всех звеньев механизма
Накладываемые кинематические связи уменьшают
число степеней свободы механизма
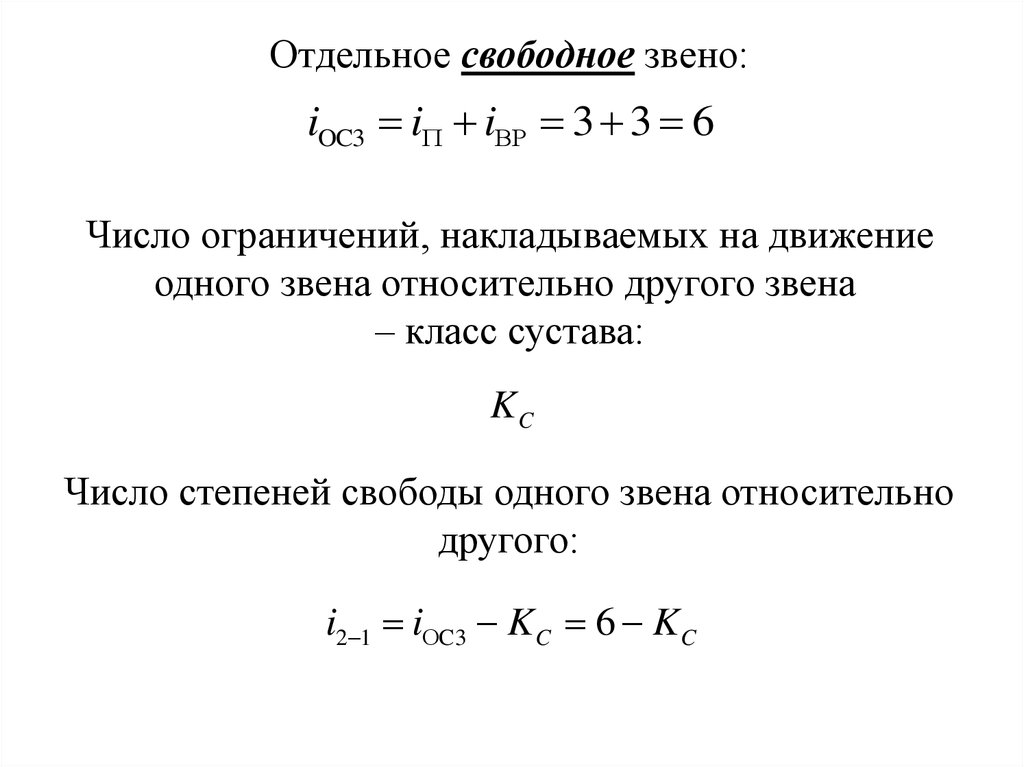
5.
Отдельное свободное звено:iOC3 i i 3 3 6
Число ограничений, накладываемых на движение
одного звена относительно другого звена
– класс сустава:
KC
Число степеней свободы одного звена относительно
другого:
i2 1 i C3 K C 6 K C
6.
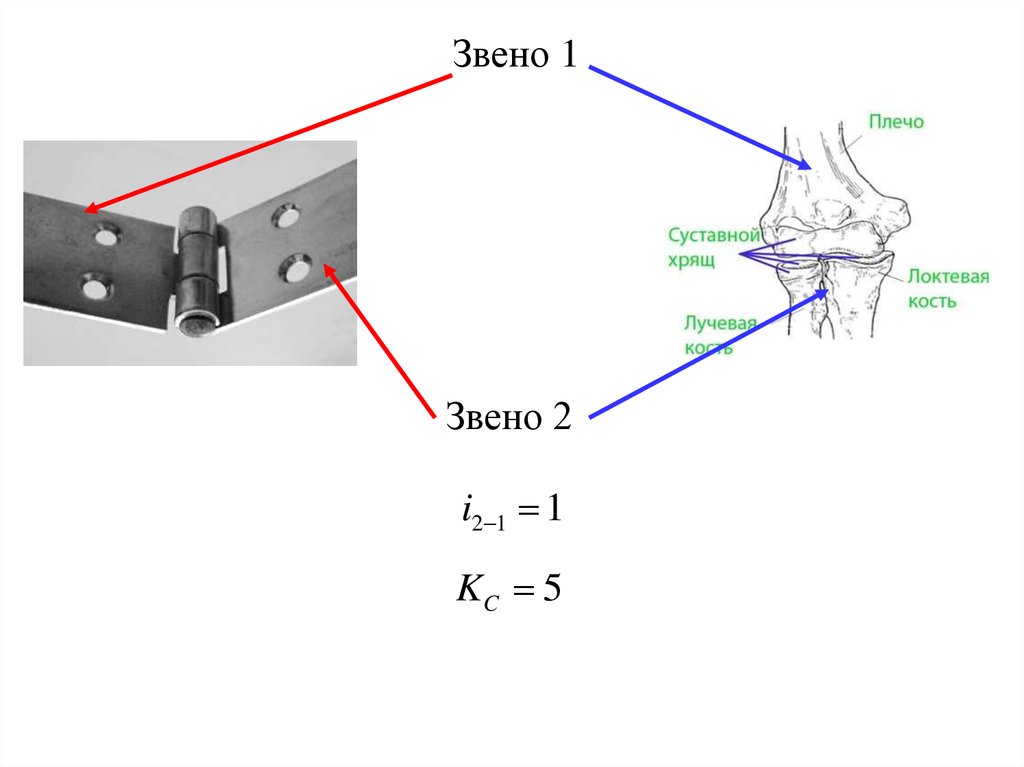
Звено 1Звено 2
i2 1 1
KC 5
7.
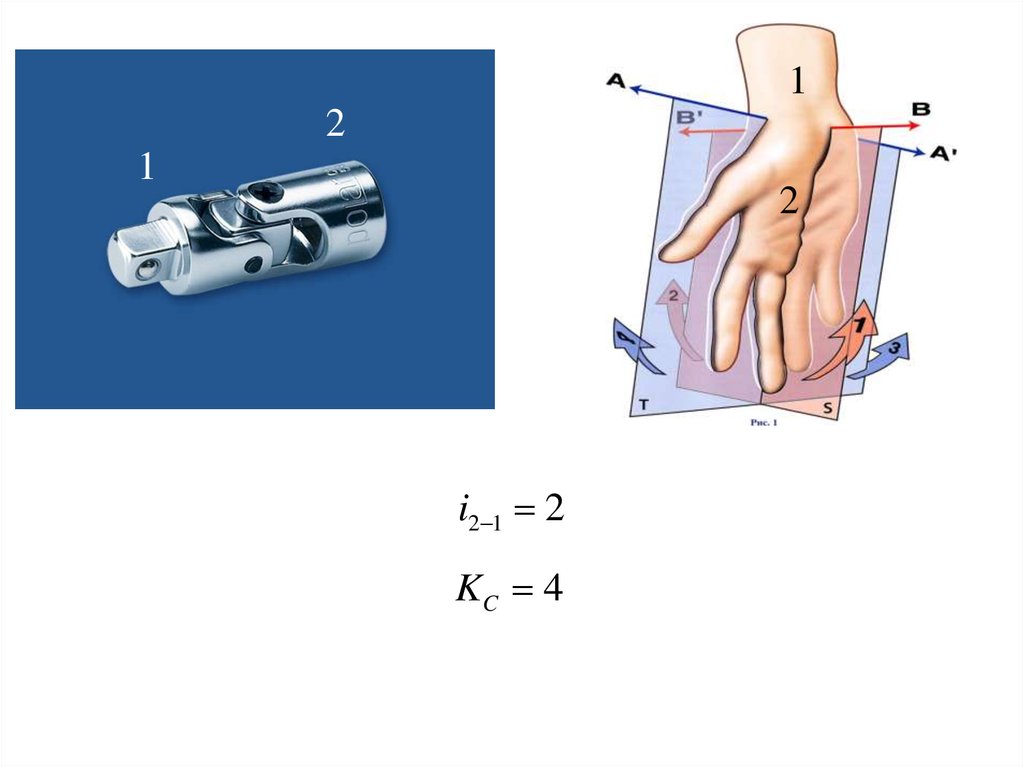
12
1
2
i2 1 2
KC 4
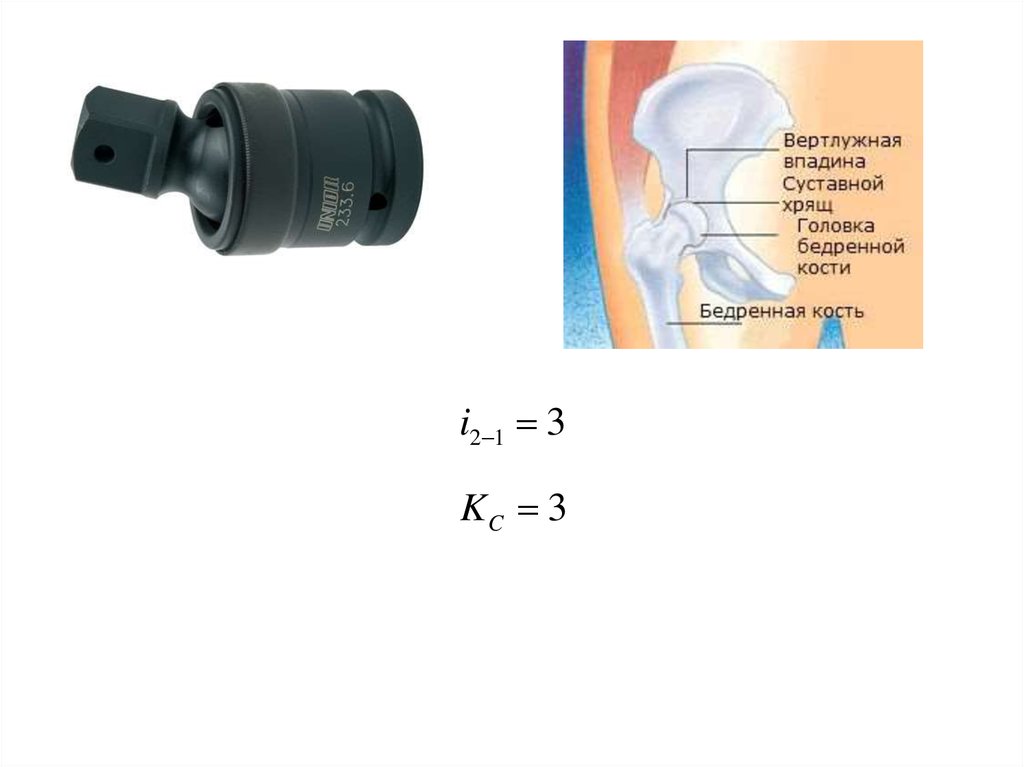
8.
i2 1 3KC 3
9.
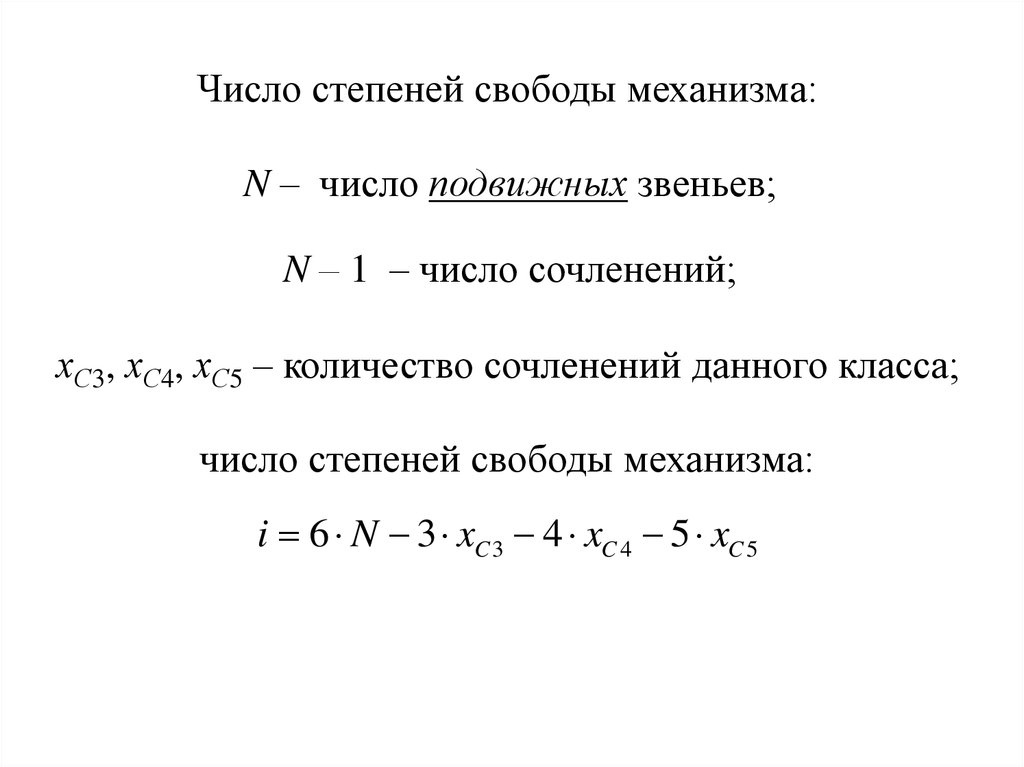
Число степеней свободы механизма:N – число подвижных звеньев;
N – 1 – число сочленений;
хС3, хС4, хС5 – количество сочленений данного класса;
число степеней свободы механизма:
i 6 N 3 xC 3 4 xC 4 5 xC 5
10.
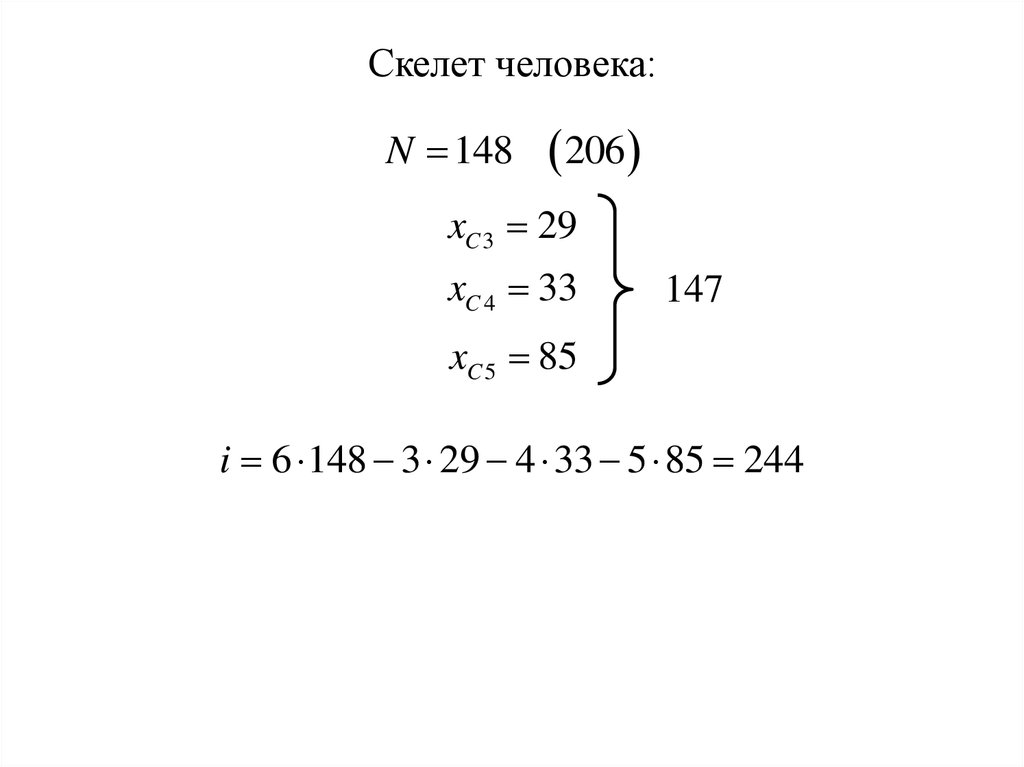
Скелет человека:N 148
206
xC 3 29
xC 4 33
147
xC 5 85
i 6 148 3 29 4 33 5 85 244
11.
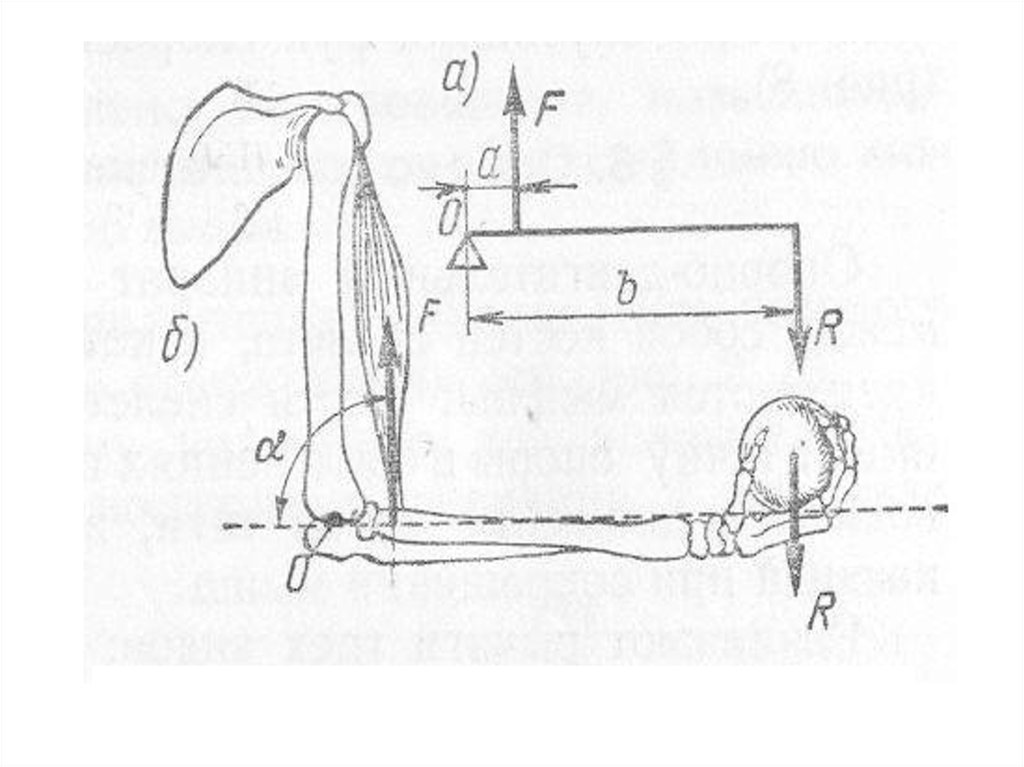
ОДА = сочлененные кости скелета ++ сухожилия и мышцы =
= совокупность рычагов, удерживаемых и
управляемых человеком
12.
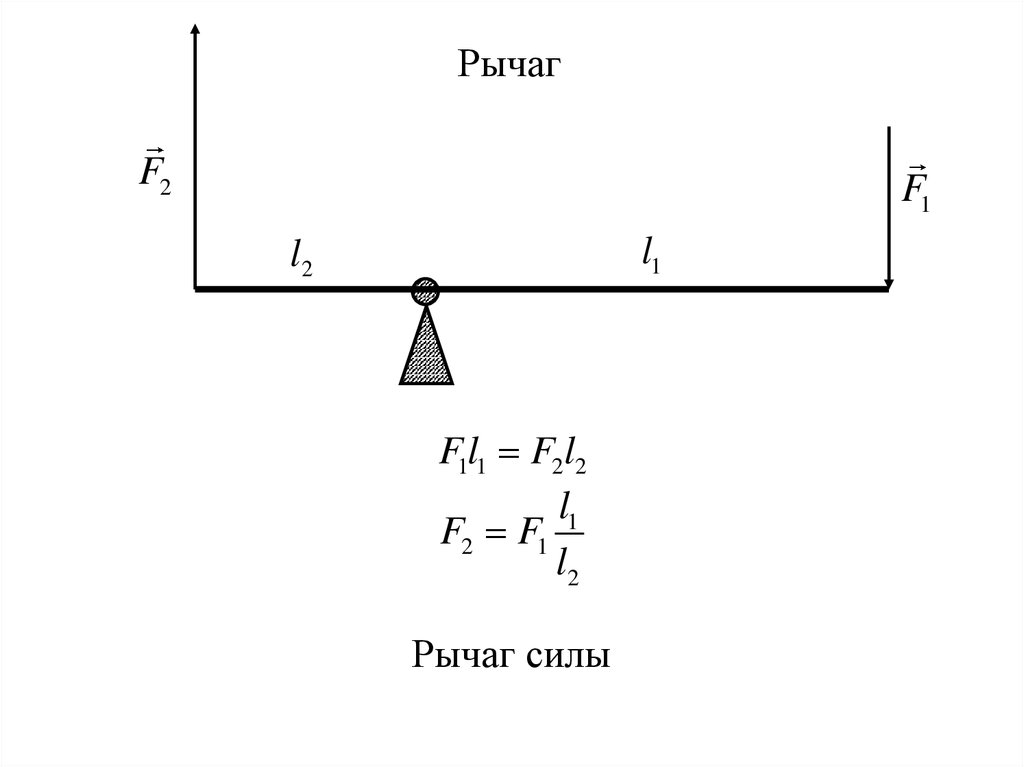
РычагF2
F1
l1
l2
F1l1 F2l2
l1
F2 F1
l2
Рычаг силы
13.
14.
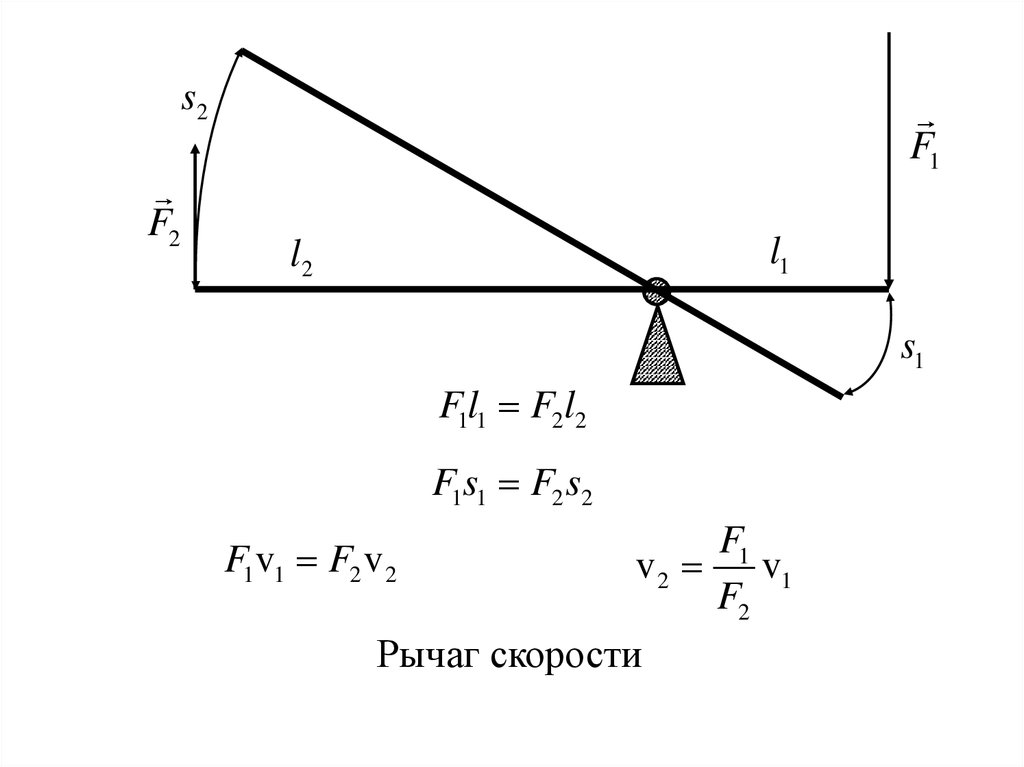
s2F1
F2
l1
l2
s1
F1l1 F2l2
F1s1 F2 s2
F1
v 2 v1
F2
Рычаг скорости
F1v1 F2 v 2
15.
Прикреплениемышцы
l1
Рычаг скорости
F1
F2
m
l2
F1l1 F2l2
F1v1 F2 v 2
F1
l2
v 2 v1 v1
F2
l1
16.
Свинг и хук:m(v 2 v . )
F
t
17.
18.
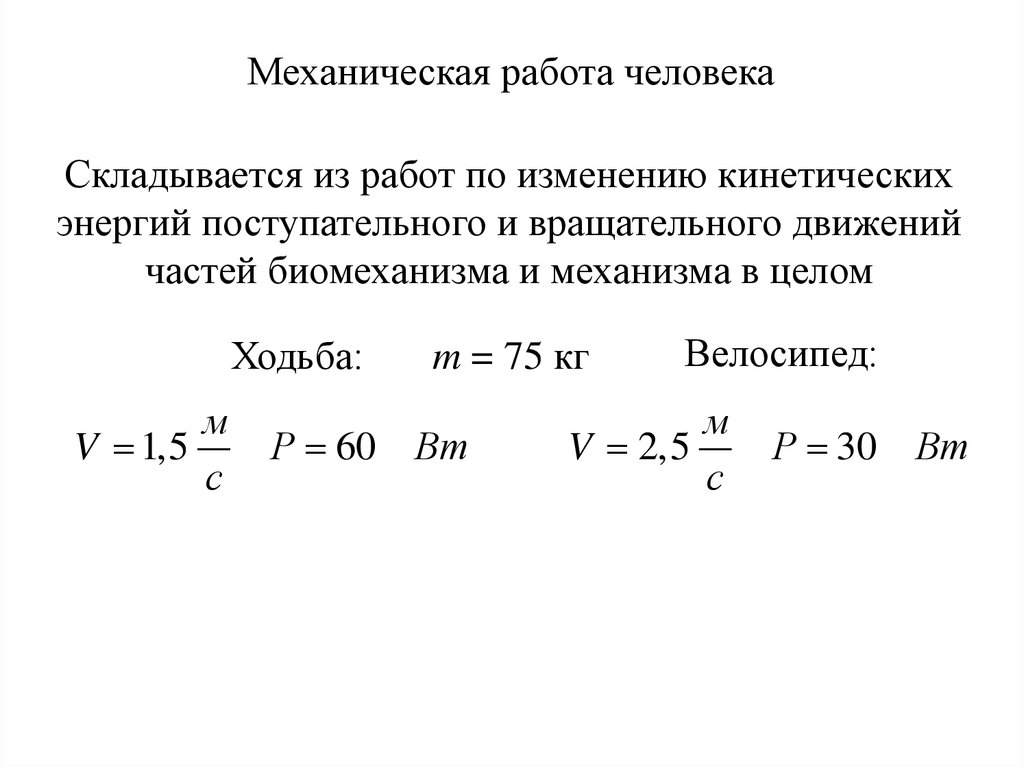
Механическая работа человекаСкладывается из работ по изменению кинетических
энергий поступательного и вращательного движений
частей биомеханизма и механизма в целом
Ходьба:
м
V 1,5
с
m = 75 кг
Р 60 Вт
Велосипед:
м
V 2,5
с
Р 30 Вт
19.
m = 75 кгh = 1,40 м
t = 0,2 c
mgh 70 9,81 1,40
P
4800 Вт
t
0,2
20.
«Статическая» работа мышц21.
Эргометрия – методы количественной оценкиработоспособности человека путем
регистрации его мышечной работы с
одновременным ЭКГ и клиническим контролем
Велоэргометрия – определяется работа, совершенная
человеком против силы трения при вращении
педалей неподвижного велосипеда
Тредмилэргометрия – контролируемая нагрузка
при ходьбе или бегу по движущейся дорожке
22.
Общие выводы:1. Скелет человека – сложный биомеханизм с
большим числом звеньев и сочленений между ними,
т.е. с большим числом степеней свободы (244)
относительных движений
2. Такой механизм обладает очень большой
подвижностью и является крайне неустойчивым из-за
большого числа степеней свободы при высоком
положении центра масс (тяжести)
23.
3. Устойчивость скелета, относительное перемещениечастей его относительно друг друга и
движение скелета, как целого,
относительно других тел, возможно
только при наличии окружающего скелет мышечного
каркаса
4. ОДА = подвижные и неподвижные кости +
+ сухожилия и мышцы