











 Программное обеспечение
Программное обеспечениеПохожие презентации:










3D веб-ГИС IPano3D
1.
3D веб-ГИС IPano3DА.Ю. Головчанский
Ведущий ГИС-специалист HelgiLab
2.
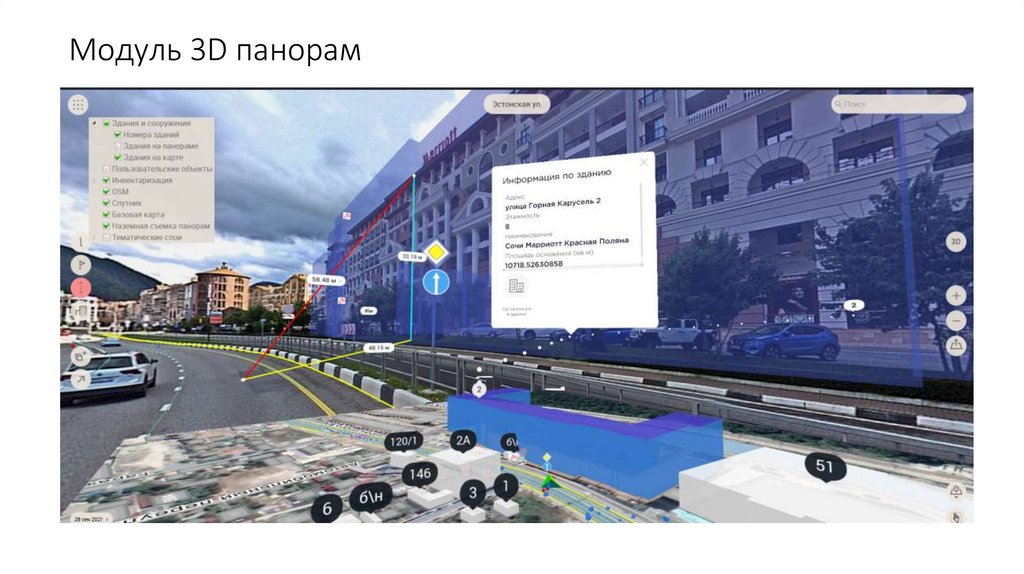
Модуль 3D панорам3.
Модуль 3D объектов4.
Возможности и функцииIPano3D
5.
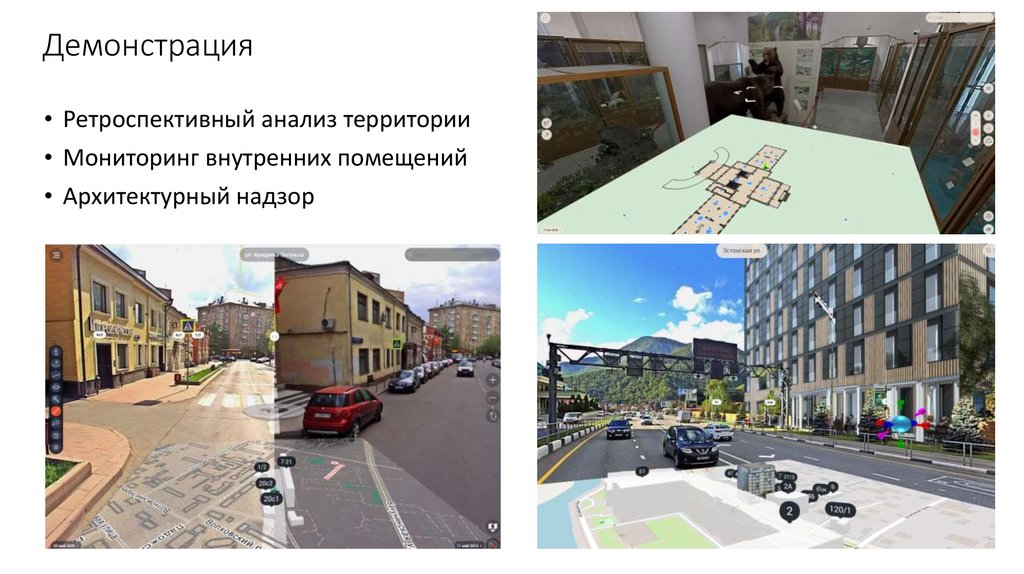
Демонстрация• Ретроспективный анализ территории
• Мониторинг внутренних помещений
• Архитектурный надзор
6.
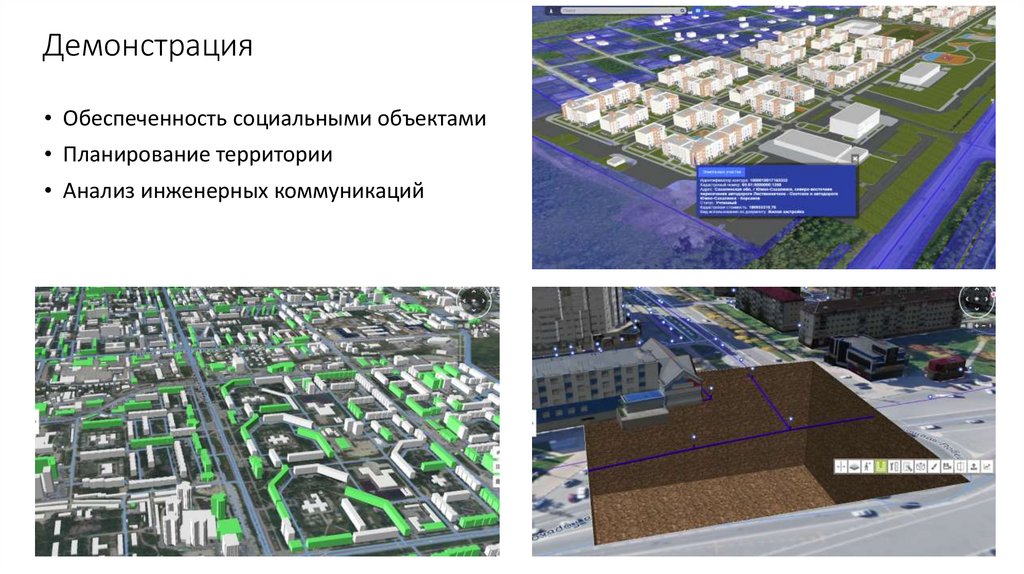
Демонстрация• Обеспеченность социальными объектами
• Планирование территории
• Анализ инженерных коммуникаций
7.
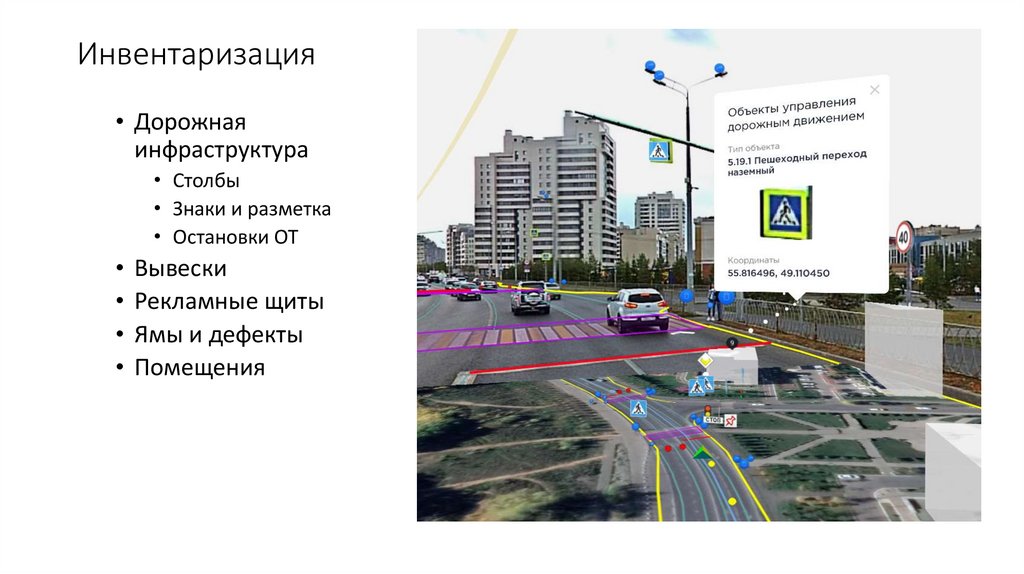
Инвентаризация• Дорожная
инфраструктура
• Столбы
• Знаки и разметка
• Остановки ОТ
• Вывески
• Рекламные щиты
• Ямы и дефекты
• Помещения
8.
Выявление нарушений• Незаконные пристройки и надстройки
• Нецелевое использование объектов
• Самовольный захват территорий
9.
Аппаратура10.
Мобильный лазерный сканер Topcon IP-S2 Compact11.
Пешеходная и велосипедная съемкиОператор с камерой(Insta360 One X2)
Оператор с камерами (Insta360 pro 2)
12.
Создание трехмерныхпанорам
13.
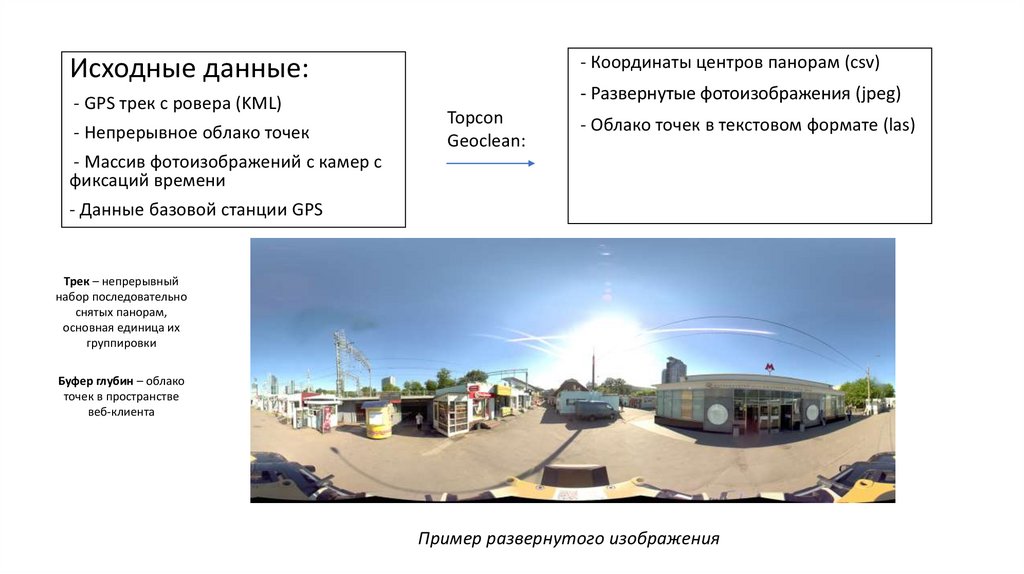
- Координаты центров панорам (csv)Исходные данные:
- GPS трек с ровера (KML)
- Непрерывное облако точек
- Развернутые фотоизображения (jpeg)
Topcon
Geoclean:
- Облако точек в текстовом формате (las)
- Массив фотоизображений с камер с
фиксаций времени
- Данные базовой станции GPS
Трек – непрерывный
набор последовательно
снятых панорам,
основная единица их
группировки
Буфер глубин – облако
точек в пространстве
веб-клиента
Пример развернутого изображения
14.
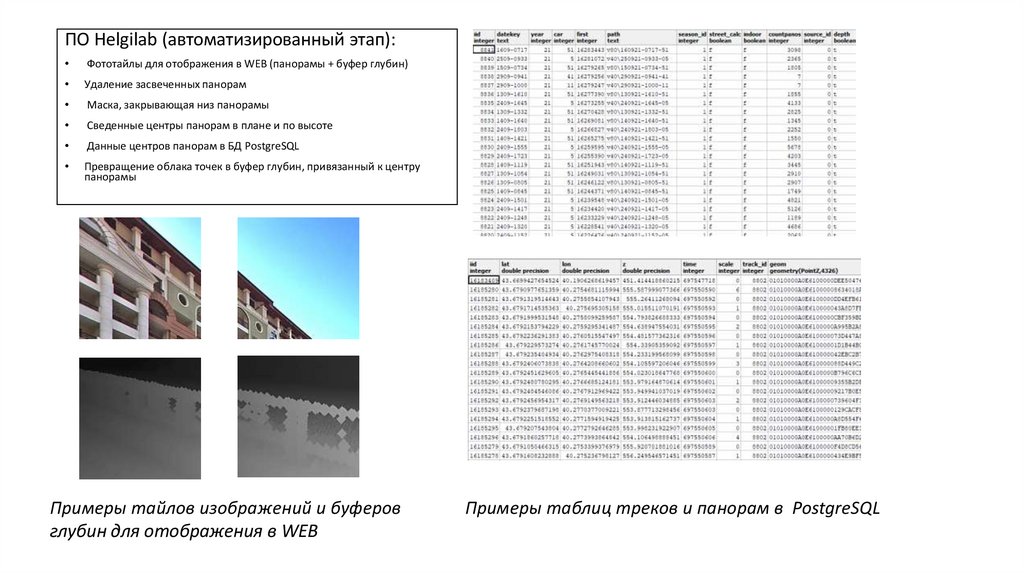
ПО Helgilab (автоматизированный этап):Фототайлы для отображения в WEB (панорамы + буфер глубин)
Удаление засвеченных панорам
Маска, закрывающая низ панорамы
Сведенные центры панорам в плане и по высоте
Данные центров панорам в БД PostgreSQL
Превращение облака точек в буфер глубин, привязанный к центру
панорамы
Примеры тайлов изображений и буферов
глубин для отображения в WEB
Примеры таблиц треков и панорам в PostgreSQL
15.
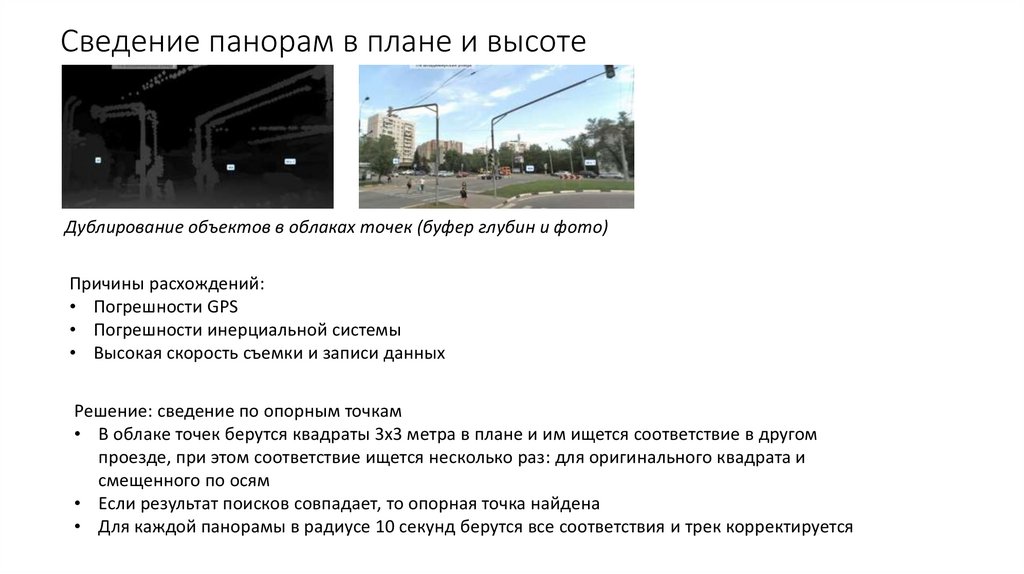
Сведение панорам в плане и высотеДублирование объектов в облаках точек (буфер глубин и фото)
Причины расхождений:
• Погрешности GPS
• Погрешности инерциальной системы
• Высокая скорость съемки и записи данных
Решение: сведение по опорным точкам
• В облаке точек берутся квадраты 3х3 метра в плане и им ищется соответствие в другом
проезде, при этом соответствие ищется несколько раз: для оригинального квадрата и
смещенного по осям
• Если результат поисков совпадает, то опорная точка найдена
• Для каждой панорамы в радиусе 10 секунд берутся все соответствия и трек корректируется
16.
ПО Helgilab (с использованиемвизуального контроля):
Удаление бракованных панорам
Капли
Сбой позиционирования
Расхождения изображения и буфера глубин
Удаление дублирующихся панорам
Привязка панорам к дорожной сети
Расстановка связей (стрелок) на перекрестках
Пример расположения центров панорам до расчистки
Это же место после расчистки и расстановки связей (стрелок)
Иллюстрация привязки панорам к графу дорог
17.
Подготовка данных18.
Распознавание• Ручное
• С использованием нейросетевых технологий
Приложение для ручного распознавания объектов
19.
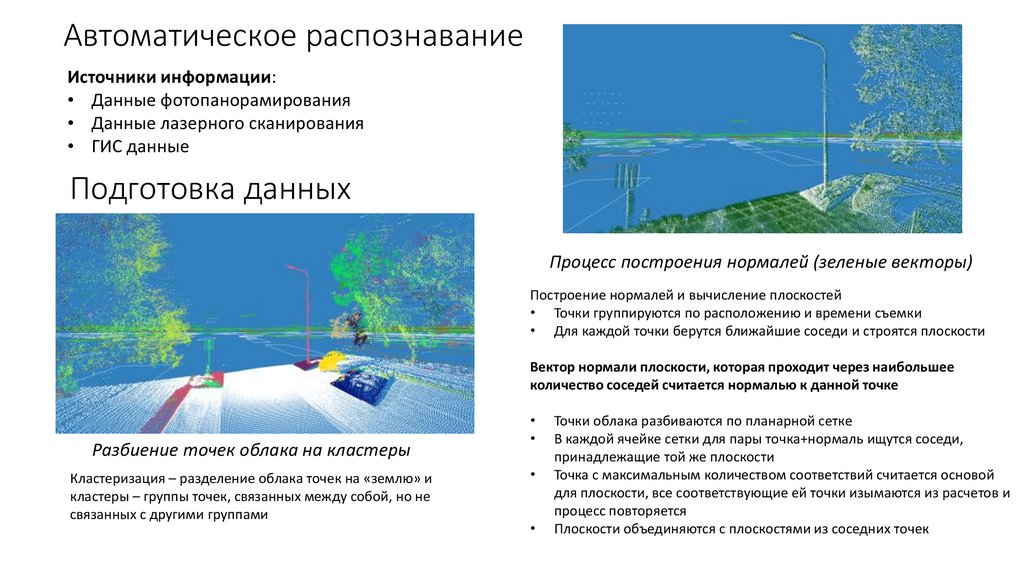
Автоматическое распознаваниеИсточники информации:
• Данные фотопанорамирования
• Данные лазерного сканирования
• ГИС данные
Подготовка данных
Процесс построения нормалей (зеленые векторы)
Построение нормалей и вычисление плоскостей
• Точки группируются по расположению и времени съемки
• Для каждой точки берутся ближайшие соседи и строятся плоскости
Вектор нормали плоскости, которая проходит через наибольшее
количество соседей считается нормалью к данной точке
Разбиение точек облака на кластеры
Кластеризация – разделение облака точек на «землю» и
кластеры – группы точек, связанных между собой, но не
связанных с другими группами
Точки облака разбиваются по планарной сетке
В каждой ячейке сетки для пары точка+нормаль ищутся соседи,
принадлежащие той же плоскости
Точка с максимальным количеством соответствий считается основой
для плоскости, все соответствующие ей точки изымаются из расчетов и
процесс повторяется
Плоскости объединяются с плоскостями из соседних точек
20.
Общий принцип распознавания (на примере столбов)• Выделение цилиндрических вертикально ориентированных объектов по кластерам
• Обучение алгоритма оператором
• Классификация найденных объектов
Интерфейс оператора для проверки распознанных столбов
21.
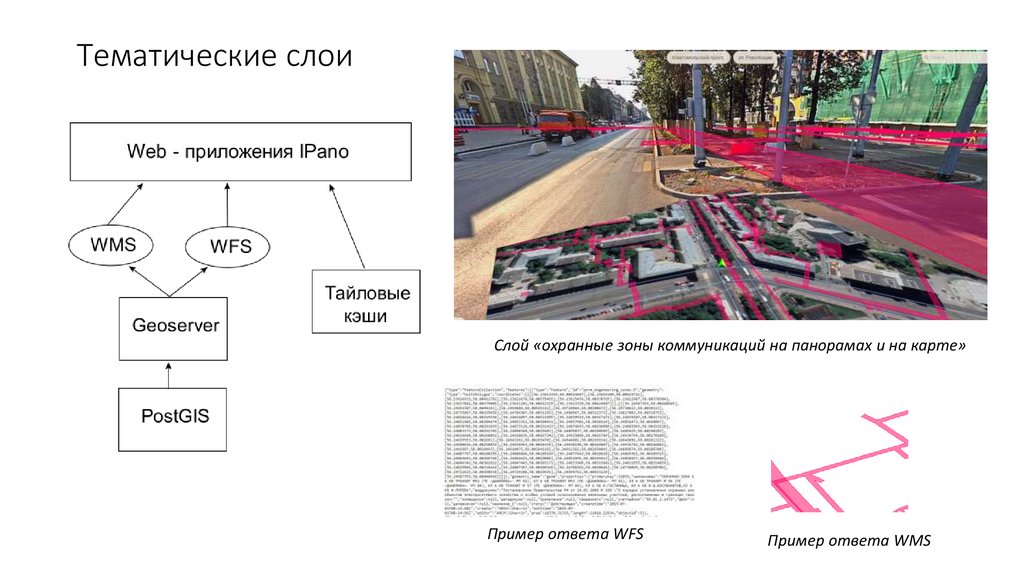
Тематические слоиСлой «охранные зоны коммуникаций на панорамах и на карте»
Пример ответа WFS
Пример ответа WMS
22.
Устройство вебприложения23.
Схема организации данных24.
Компоненты приложения• Контейнер панорам
• Карта
• Сервисы данных и поиска
• Инструменты
• Файлы конфигурации
Технологии
• WebGL
• Three.JS
• OpenLayers, Leaflet
• JS-фреймворки (JQuery,
jstree, и т. п.)
25.
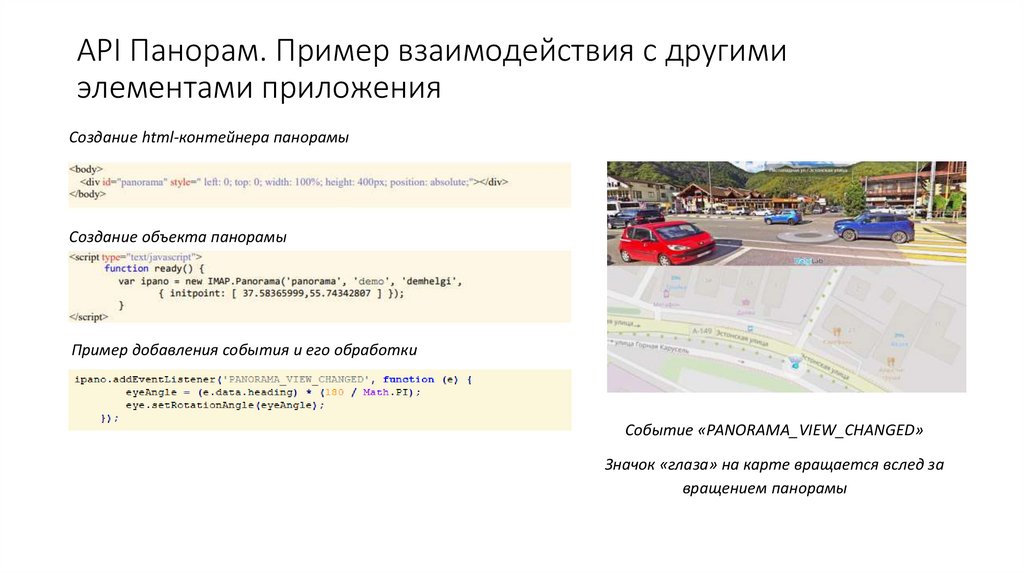
API Панорам. Пример взаимодействия c другимиэлементами приложения
Создание html-контейнера панорамы
Создание объекта панорамы
Пример добавления события и его обработки
Событие «PANORAMA_VIEW_CHANGED»
Значок «глаза» на карте вращается вслед за
вращением панорамы
26.
КартаJavaScript Фреймворки
• OpenLayers
• Leaflet
Пример синтаксиса создания карты и слоев в OpenLayers
27.
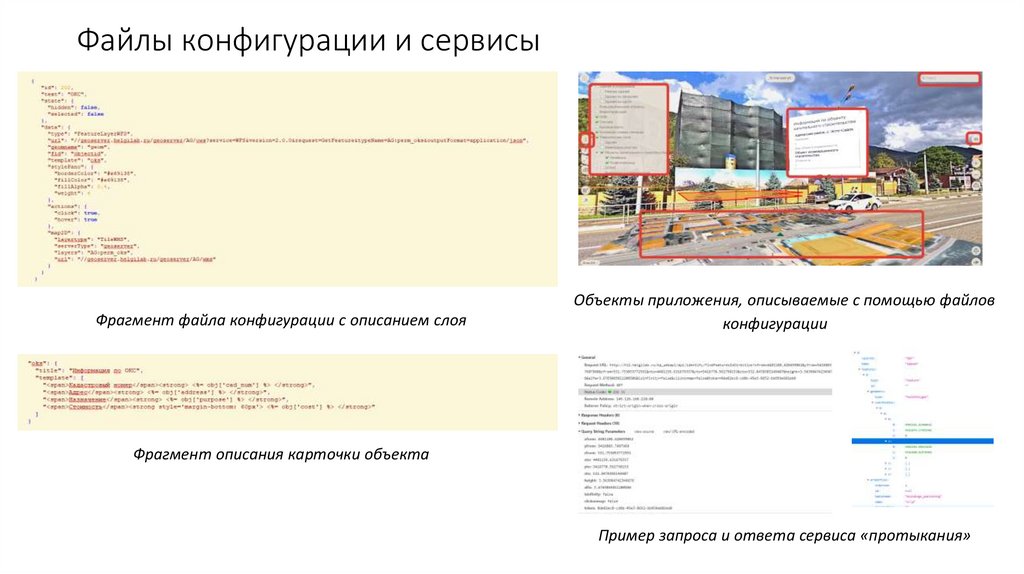
Файлы конфигурации и сервисыФрагмент файла конфигурации с описанием слоя
Объекты приложения, описываемые с помощью файлов
конфигурации
Фрагмент описания карточки объекта
Пример запроса и ответа сервиса «протыкания»
28.
Дополненная реальность. СценыКомпоненты
• Zip-архив с моделью (obj)
• Фоновый процесс загрузки
моделей с сервера на клиент
• Преобразование obj во
внутренний формат моделей
three.js
• Клонирование моделей на
панораме и на карте
29.
Модуль 3d объектов30.
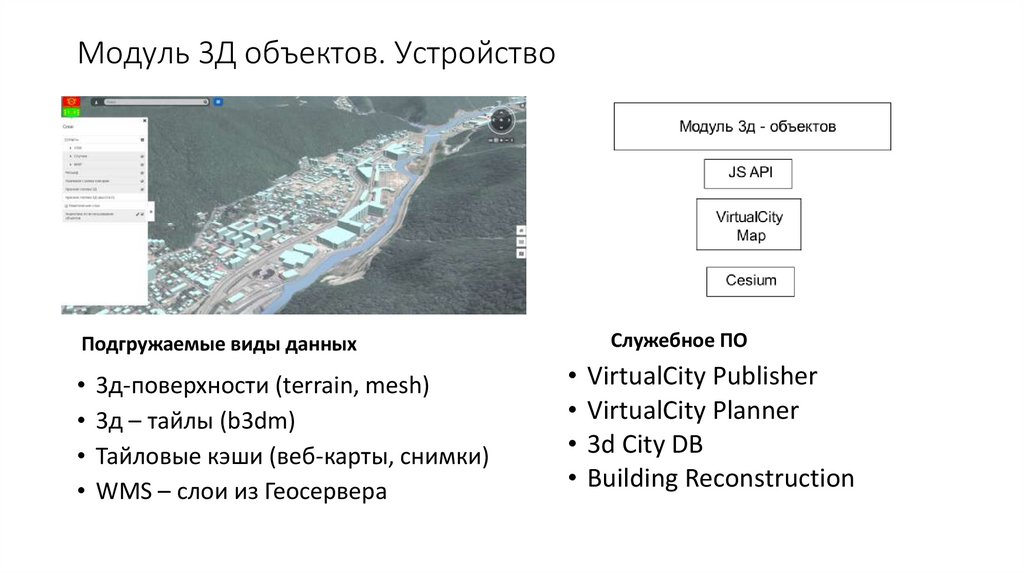
Модуль 3Д объектов. УстройствоПодгружаемые виды данных
• 3д-поверхности (terrain, mesh)
• 3д – тайлы (b3dm)
• Тайловые кэши (веб-карты, снимки)
• WMS – слои из Геосервера
Служебное ПО
• VirtualCity Publisher
• VirtualCity Planner
• 3d City DB
• Building Reconstruction
31.
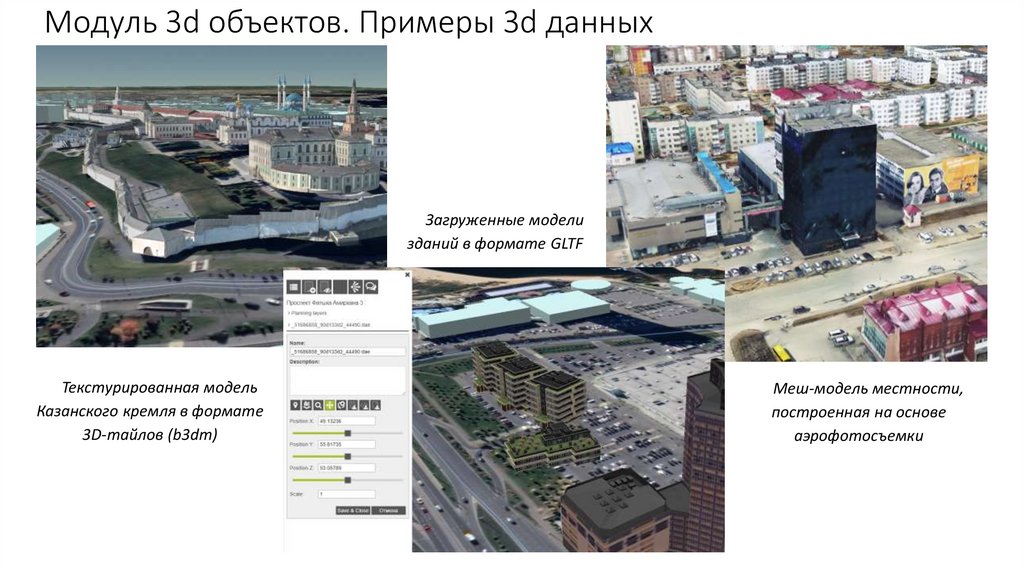
Модуль 3d объектов. Примеры 3d данныхЗагруженные модели
зданий в формате GLTF
Текстурированная модель
Казанского кремля в формате
3D-тайлов (b3dm)
Меш-модель местности,
построенная на основе
аэрофотосъемки
32.
Модуль 3Д объектов. 3d-визуализация плоских слоевМодели зданий
на основе плоской
геометрии и
информации о
высоте
Модель распределения
количества абонентов по
данным мобильных сетей
Модели подземных
коммуникаций (линейных и
точечных)
33.
КонтактыТелефон: +7 (962) 921 -23 -21
E-mail: info@helgilab.ru, golovchanskiy@helgilab.ru