


 Программное обеспечение
Программное обеспечениеПохожие презентации:




")



")
 знань курсантів")
Розробка автоматизованої системи керування об’єктом
1.
Міністерство освіти і науки УкраїниПавлоградський коледж
Національного технічного університету
“Дніпровська політехніка”
Курсовий проект
З дисципліни: “Мікропроцесорні системи”
Тема: Розробка автоматизованої системи керування
об’єктом
“Підтримка рівня води у лаві шахти”
Виконавець: студент групи
КС-1-19
Тихонов А.О.
Керівник проекту: Герасимюк В.І.
2.
Мета роботиРозробити автоматизовану
систему керування об’єктом
“Підтримка рівня води у лаві шахти ”
на мові низького рівня – Assembler
3.
Огляд аналогівВодонапірні вежі
Рожновського, призначені для
регулювання нерівномірності
водоспоживання, зберігання
резервного запасу води.
Рисунок 1 Водонапірна вежа Рожновського
4.
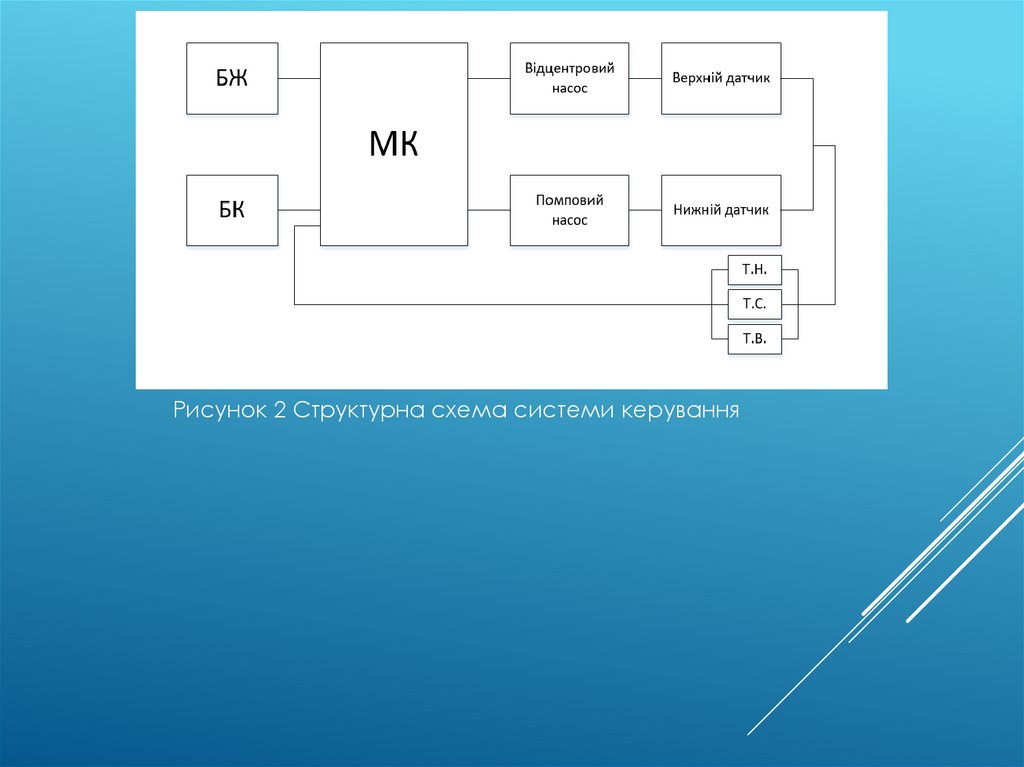
Рисунок 2 Структурна схема системи керування5.
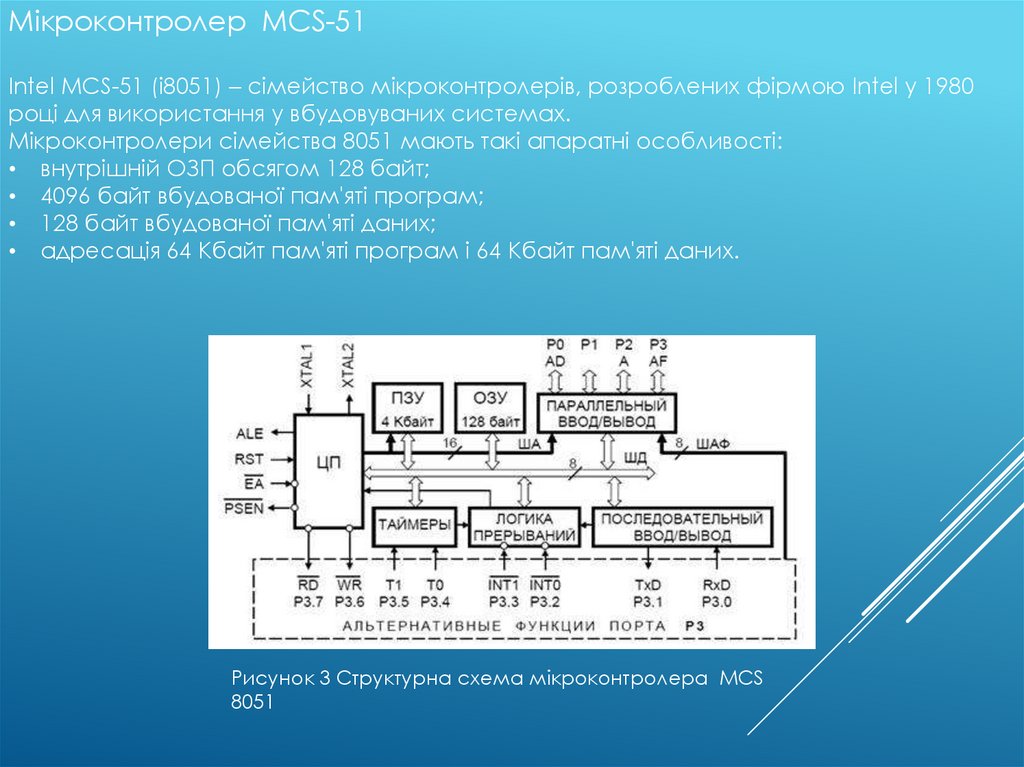
Мікроконтролер MCS-51Intel MCS-51 (i8051) – сімейство мікроконтролерів, розроблених фірмою Intel у 1980
році для використання у вбудовуваних системах.
Мікроконтролери сімейства 8051 мають такі апаратні особливості:
• внутрішній ОЗП обсягом 128 байт;
• 4096 байт вбудованої пам'яті програм;
• 128 байт вбудованої пам'яті даних;
• адресація 64 Кбайт пам'яті програм і 64 Кбайт пам'яті даних.
Рисунок 3 Структурна схема мікроконтролера MCS
8051
6.
Рисунок 4Відцентрові насоси використовуються
для транспортування рідин шляхом
перетворення кінетичної енергії
обертання в гідродинамічну енергію
потоку рідини. Обертальна енергія, як
правило, передається від двигуна або
електродвигуна.
Рисунок 5 Насос помпового
типу
Насос помпового типу
призначений для перекачування
води. Найчастіше використовують
для відкачування води з кабельних
траншей, затоплених підвалів,
будівельних каналів та інших
конструкцій.
7.
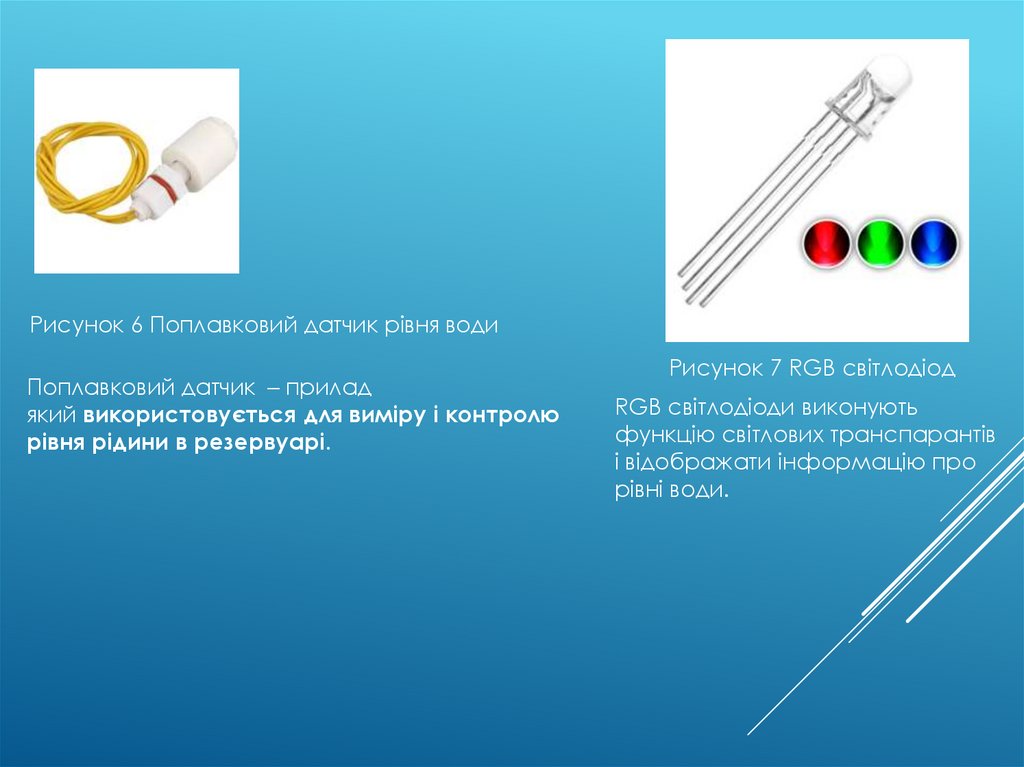
Рисунок 6 Поплавковий датчик рівня водиПоплавковий датчик – прилад
який використовується для виміру і контролю
рівня рідини в резервуарі.
Рисунок 7 RGB світлодіод
RGB світлодіоди виконують
функцію світлових транспарантів
і відображати інформацію про
рівні води.
8.
ПускачМагнітний пускач електромеханічний комутаційний
апарат, призначений для керування
живленням електродвигунів
Рисунок 8 Пускач
9.
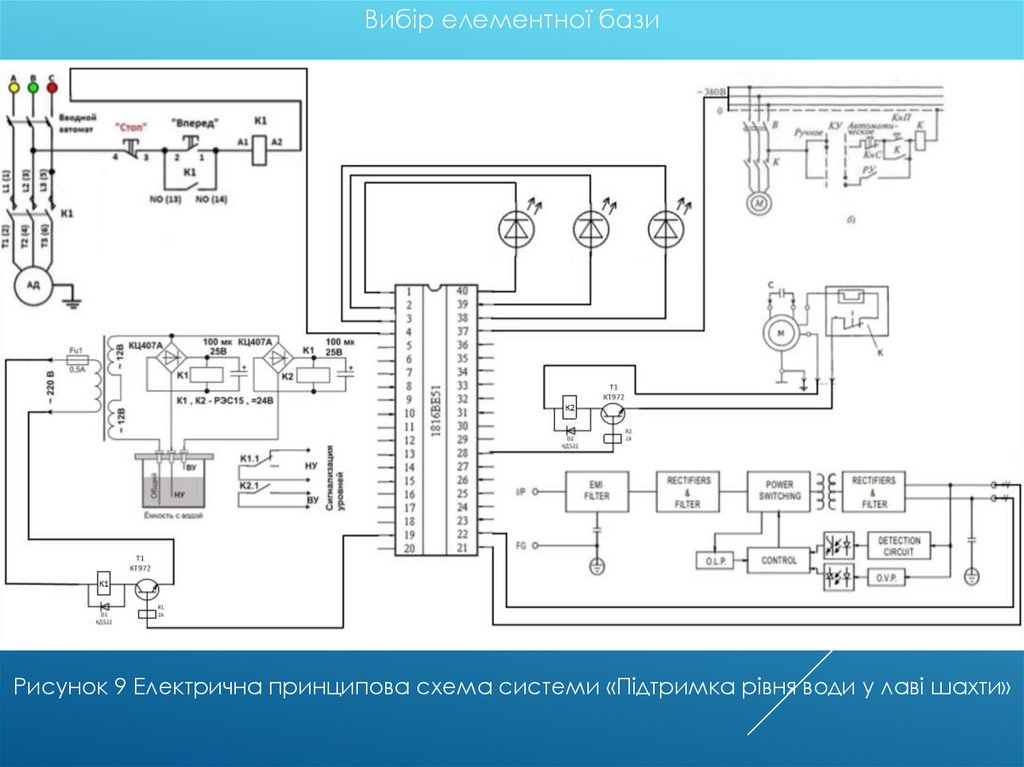
Вибір елементної базиРисунок 9 Електрична принципова схема системи «Підтримка рівня води у лаві шахти»
10.
Опис структурної схеми джерела живленняБлок живлення - вторинне джерело живлення, призначене для
забезпечення живлення електроприладу електричною енергією.
Основним призначенням блоку живлення LRS-75-24 В є незалежне
живлення від вхідного пристрою. Завдяки такому блоку
забезпечується вентиляція, освітлення, напруга і зв'язок.
Рисунок 10 Електрична схема блоку живлення
11.
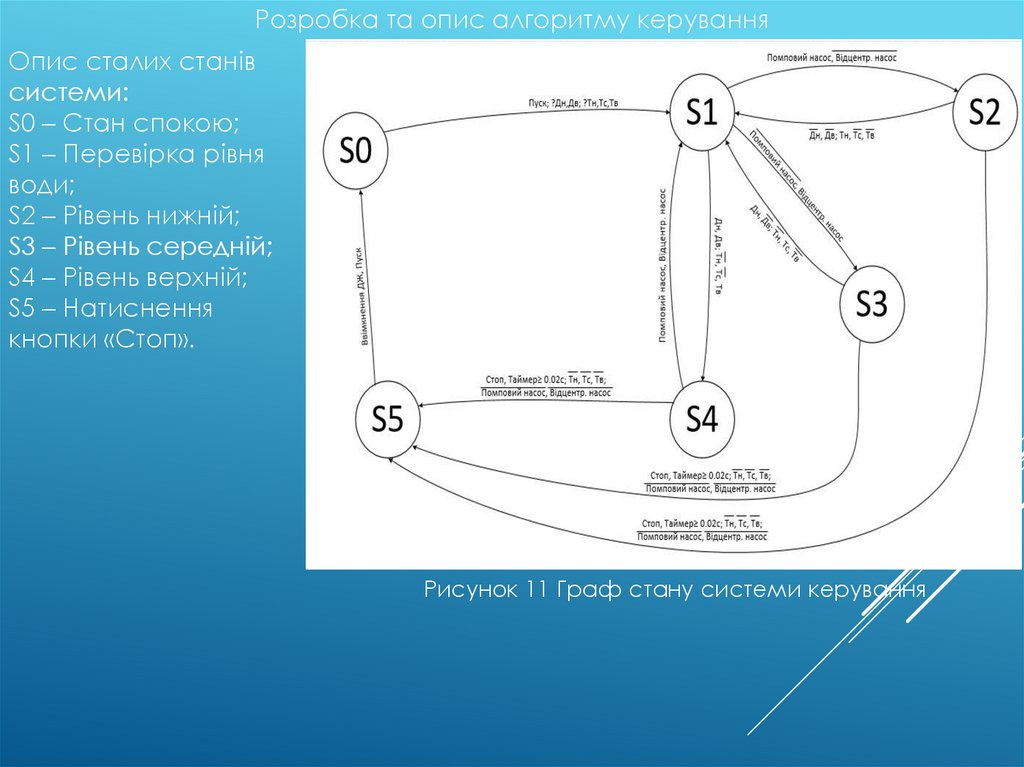
Розробка та опис алгоритму керуванняОпис сталих станів
системи:
S0 – Стан спокою;
S1 – Перевірка рівня
води;
S2 – Рівень нижній;
S3 – Рівень середній;
S4 – Рівень верхній;
S5 – Натиснення
кнопки «Стоп».
Рисунок 11 Граф стану системи керування
12.
Опис програмного забезпеченняДля написання програмного забезпечення була використана мова
програмування низького рівня - Assembler. Налаштування програми
для системи керування виконано в програмі MCStudio.
У програмі використовувались наступні команди:
SET - присвоєння порту;
CLR - обнулення;
SETB - встановлення біта в логічну одиницю;
JMP - безумовний перехід;
JB - перехід за умови, що біт встановлений;
13.
MC Studio – це інтегральне середовищерозробки програмного забезпечення для
мікроконтролерів серії MCS-51, яке має
симулятор
оточення,
що
дозволяє
промоделювати
пристрої,
що
оточують
мікроконтролер в реальній системі.
14.
ВИСНОВКИУ ході розробки програмного забезпечення було
вивчено особливості програмування мовою низького
рівня - Assembler. Поглиблені практичні навички
роботи з середовищем програмування низького
рівня MC Studio.