

























 Физика
ФизикаПохожие презентации:

")








Кінематика поступального та обертального руху (лекція 1)
1. ЛЕКЦІЯ 1
ЛЕКЦІЯВСТУП ДО КУРСУ
1
«ФІЗИКА»
МОДУЛЬ 1 «МЕХАНІКА»
Тема 1. «КІНЕМАТИКА
ПОСТУПАЛЬНОГО ТА
ОБЕРТАЛЬНОГО РУХУ»
лектор
Бойко В.В.
2. МАТЕРІЯ
МАТЕРІЯ–
це в широкому
розумінні все те, що реально існує у
Всесвіті, і що може бути виявлене
людиною за допомогою органів
відчуття або приладів. Матерія є
об’єктивною реальністю, тобто вона
існує незалежно від свідомості людини
(суб’єкта).
3. РЕЧОВИНА та ПОЛЕ
Дещо умовно матерію розділяють на двавиди неживої природи: речовина та поле.
речовина (від елементарних частинок,
атомів, молекул , тіл, планет, зіркових систем, до
галактик…всесвіту) та
ПОЛЯ (матеріальні носії різних взаємодій –
таких, як гравітаційне, електричне, магнітне,
електромагнітне, поля ядерних взаємодій)
4. РУХ. Форми руху матерії
РУХ в широкому філософському сенсі– це любий процес, люба зміна, що
проходить з матерією.
Форми руху
- від найпростішого
механічного руху, теплового руху молекул,
і до складних форм руху, таких як
мислення.
5. ПРЕДМЕТ НАУКИ «ФІЗИКА»
Фізика –це наука, що вивчає
найпростіші і в той же час найбільш
загальні закономірності явищ природи,
властивості та будову матерії і закони її руху.
ФІЗИКА, як наука, вивчає найпростіші
форми руху матерії, серед яких найбільш
простою формою є МЕХАНІЧНИЙ РУХ.
Фізика (грец. Physis - природа).
6. Мехачний рух
Механіка (як розділ фізики)вивчає механічний рух – ? Це
зміна положення тіла з часом відносно
іншого тіла або системи тіл, що умовно
вважають нерухомими. Або - зміна з
часом взаємного розміщення тіл, або їх
частин
7. РОЗДІЛИ МЕХАНІКИ: Кінематика Динаміка Статика
8. Механіка – найдревніший розділ фізики
9. Створення класичної теорії
Довівнезалежність g
від маси тіла
10. основні Моделі
Матеріальна точка - тіло,розмірами та формою якого
можна нехтувати в даній
конкретній фізичній задачі.
Тіло (система тіл) – система матеріальних точок
11. Матеріальна точка
Матеріальна точка - тіло, розмірами таформою якого можна нехтувати за даних умов.
Критерій – характерні розміри тіла значно менші за
відстані, які тіло проходить в даному конкретному русі
Приклад:
Землю можна вважати матеріальною точкою при вивченні її
руху навколо Сонця.
12. основні Моделі
Абсолютно тверде тіло тіло, відстань між будь-якимидвома точками якого залишається
незмінною в процесі руху
13. Будь-який рух абсолютно твердого тіла можна розкласти на два головних види руху поступальний та обертальний.
14. Поступальний рух
Поступальний рух — це такий рух, при якомубудь-яка пряма, що з’єднує дві довільні точки
цього тіла, проведена в тілі, що рухається,
залишається паралельною сама собі.
В кожний момент часу швидкості та
прискорення
всіх
точок
тіла
при
поступальному русі будуть однаковими, для
описання такого руху твердого тіла
достатньо розглянути рух будь-якої однієї
його точки.
15. Обертальний рух
При обертальному русі абсолютнотвердого тіла всі точки тіла
рухаються по колах, центри яких
лежать на одній прямій, яку
називають віссю обертання.
16.
Координати тіла визначають йогоположення в просторі.
Найчастіше використовують
праву прямокутну Декартову
систему координат. Положення
точки
М
задається
трьома
y
x
z
координатами М(x;y;z)
або
радіус-вектором , який сполучає
початок координат з точкою М.
17. Траєкторія руху
Траєкторією руху матеріальної точки називаєтьсянеперервна лінія, яку описує ця точка по відношенню
до обраної системи координат.
В залежності від форми траєкторії розрізняють
прямолінійний та криволінійний рух.
Форма траєкторії залежить від обрання системи
відліку.
Прямолінійний
Криволінійний
18.
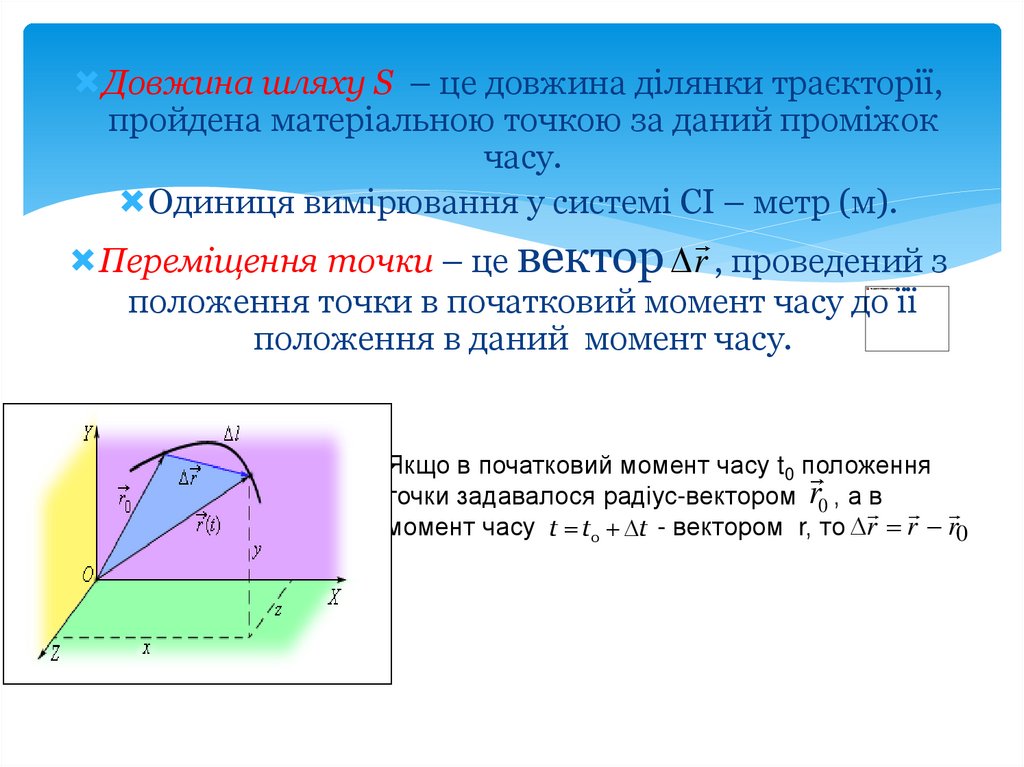
Довжина шляху S – це довжина ділянки траєкторії,пройдена матеріальною точкою за даний проміжок
часу.
Одиниця вимірювання у системі СІ – метр (м).
Переміщення точки – це вектор r , проведений з
положення точки в початковий момент часу до її
положення в даний момент часу.
Якщо в початковий момент часу t0 положення
точки задавалося радіус-вектором r0 , а в
r
r r0
момент часу t t0 t - вектором r, то
19. Миттєва швидкість
Миттєвоюшвидкістю
називають
першу
похідну
за
часом
від
радіус-вектора
матеріальної точки. Це векторна величина.
dr
v .
dt
Вектор миттєвої швидкості спрямований по
дотичній до траєкторії руху. Можна довести, що
модуль миттєвої швидкості дорівнює першій похідній
шляху за часом
v v
У системі СІ одиниця вимірювання швидкості – метр за секунду
20.
При рівномірному русі швидкість та її модуль незмінюються. При нерівномірному русі v змінюється з
часом, тому в даному випадку користуються середньою
шляховою швидкістю нерівномірного руху, яку
позначають <v>, або vc :
s
v
t
s– ділянка
шляху, пройдена точкою за час t
Прискорення a характеризує швидкість зміни вектора швидкості
точки.
t
Використовуються поняття середнього прискорення за час
v
a
t
21.
Прискорення в системі СІ [a]=м/c2В загальному випадку криволінійного
руху вектор прискорення визначається
як сума двох складових
22. Нормальний, тангенціальний вектор.
Вектор a n називається нормальним(доцентровим) прискоренням, він спрямований
по нормалі до траєкторії до центру її кривизни.
Нормальне прискорення виникає тоді, коли
вектор швидкості
змінює свій напрямок.
Вектор a називається тангенціальним
прискоренням, він спрямований по дотичній до
траєкторії. Тангенціальне прискорення виникає
при зміні модуля швидкості.
23. Модуль повного прискорення
a an 2 a 2 .В курсі механіки доводиться, що
v2
an
,
R
R – радіус кривизни траєкторії.
dv
a
dt
24. Окремі випадки:
1. a n 0a n 0,
– прямолінійний рівномірний рух
a 0
a a const
2. v v at
0
- прямолінійний рівнозмінний рух
axt 2
s v0 t
2
a
3. 0
a a n const - рівномірний обертальний
рух по колу з постійною за модулем швидкістю
25. Рух матеріальної точки по колу. Характеристики обертального руху
Для опису обертального руху матеріальної точки зручно використовуватикутові характеристики руху: кутове переміщення , кутову швидкість та
кутове прискорення
d
dt
26.
Швидкість руху точки по колу називається лінійною швидкістюv R.
Якщо W = const, то обертання рівномірне. Для характеристики
рівномірного обертання використовуються період T і частота n обертання.
Період обертання T – це час, за який точка здійснює один повний оберт,
тобто повертається на кут
2
,
T
T
2
.
27.
Частота обертання n – це число повних обертів точкинавколо осі за одиницю часу, тобто:
1
n
;
T 2
2 n.
Для характеристики нерівномірного обертання
використовується
кутове прискорення
2
d d
.
2
dt
dt
28. Зв`язок нормального та тангенціального прискорення з кутовими характеристиками руху
a . R,При рівнозмінному обертальному русі
параметрами існують такі залежності:
0 .t ;
an 2 R.
const
і між кутовими
0t
0– початкова кутова швидкість (при t=0).
.t 2
2
.