





 Военное дело
Военное делоПохожие презентации:










Разработка структурной схемы дистанционно-управляемой платформы для многоспектральных приборов наблюдения и разведки
1.
Филиал Военной академииматериально-технического обеспечения (г. Пенза)
ВОЕННО-НАУЧНАЯ РАБОТА
Разработка структурной схемы дистанционно-управляемой платформы
для многоспектральных приборов наблюдения и разведки
(шифр «Схема»)
Автор – курсант Федотов Владимир Алексеевич
Научный руководитель – доцент Жириков Сергей Анатольевич
2.
Цель конкурсной работыРазработка
структурной
схемы
дистанционно-управляемой
платформы кругового наведения современных многоспектральных
приборов наблюдения и разведки, позволяющей в автоматическом
режиме определять прямоугольные и геодезические координаты места
стояния, горизонтальные и вертикальные углы, осуществлять
сканирование местности в заданном секторе разведки, передавать
получаемую информацию на выносные приемники.
2
3.
Классификация оптико-электронных средств разведки3
4.
Основные технические характеристики многоспектральныхприборов наблюдения и разведки
Основные
характеристики
1ПН142
1ПН143
MATIS
(Франция)
Catherine GP
Спектральный диапазон, мкм
8-12
3-5
3-5
8-12
Дальность распознавания цели
«танк», м
4000
4000
4500
4500
Поле зрения, град
телевизионный канал
тепловизионный канал
3х2,25
3х2,25
6х9
6,75х9
6х4
6х4
2х3
2,25х3
Тип ФП,
формат
InSb
320х240
КРТ
2х240
InSb
640х480
КРТ
4х288
Масса, кг
2,85
RS232
10
RS232
2,5
RS232
Bluetooth
12,5
RS232
Wifi
2016
2016
2009
2010
Канал передачи данных
Год принятия на вооружение
(США)
4
5.
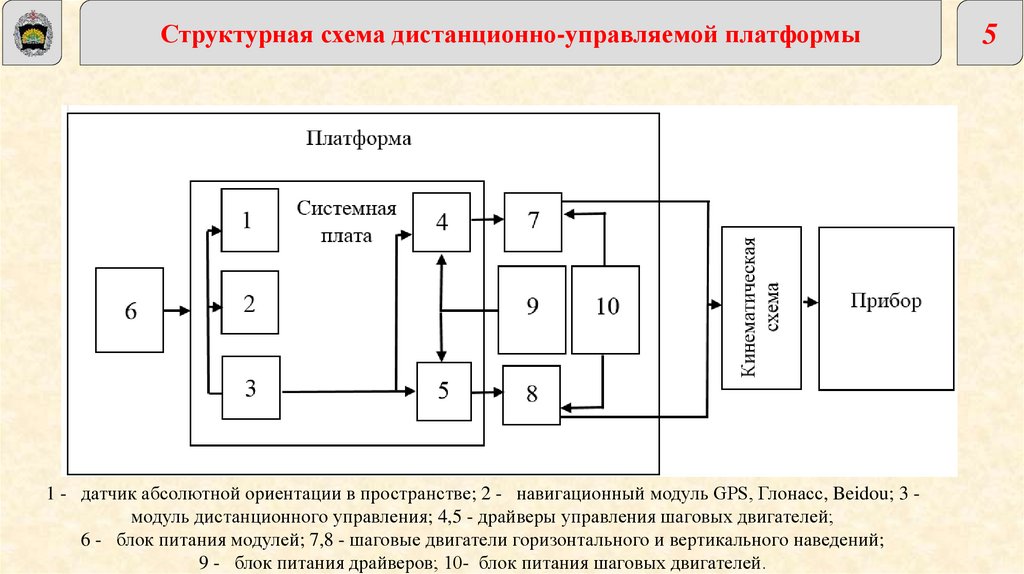
Структурная схема дистанционно-управляемой платформы1 - датчик абсолютной ориентации в пространстве; 2 - навигационный модуль GPS, Глонасс, Beidou; 3 модуль дистанционного управления; 4,5 - драйверы управления шаговых двигателей;
6 - блок питания модулей; 7,8 - шаговые двигатели горизонтального и вертикального наведений;
9 - блок питания драйверов; 10- блок питания шаговых двигателей.
5
6.
Датчик ориентации в пространствеРисунок 2 – Навигационный модуль
Характеристики модуля
Рисунок 1 – Модуль абсолютной
ориентации в пространстве
Модуль включает в себя: трехосный 14-разрядный
акселерометр, трехосный 16-разрядный гироскоп, трехосный
геомагнитный
датчик
(компас)
и
32-разрядный
микроконтроллер. Датчик также может предоставлять
интегрированные данные: углы Эйлера, векторы направления.
Основным его достоинство -освобождение пользователя от
обработки полученных алгоритмов, выводя сразу полученные
результаты.
Название
Параметр
характеристики
Поддерживаемые
GPS, Глонасс,
навигационные
Beidou
системы
Габариты(мм)
30x30
Точность
<2м
позиционирования (м)
Частота выводимых
1...10
данных (Гц)
Интерфейс
UART
Потребляемый ток
до 25
(мА)
Поддерживаемые
1200,2400,4800,960
скорости UART
0,19200,38400,5760
(бит/cек)
0,115200
6
7.
Модуль дистанционного управления7
Таблица 2 – Технические
характеристики модуля
Рисунок – Модуль дистанционного
управления
Таблица 1 – Режимы работы модуля
Скорость
передачи по
проводу бит/сек
Скорость
передачи в
эфире бит/сек
Дальность
передачи данных,
м
1200/
2400
4800/
9600
19200/
38400
57600/
115200
5000
15000
58000
236000
до
1800
до
600
Название характеристики
Параметр
Напряжение модуля (В)
3,3-5
Диапазон работы в
температурных условиях
(°С)
Интерфейс
Ток при передаче
данных(мА)
Мощность передатчика
(дБм)
Чувствительность
приемника (дБм)
Дальность связи (км)
Поддерживаемые
скорости UART (бит/cек)
-25…+75
Количество каналов
передачи данных
Количество рабочих
режимов
100
UART
100
до +20
до -117
до 1.8
1200,2400,4800,9
600,19200,38400,
57600,115200
Мощность передачи (мВт)
100
4
8.
Шаговый двигатель8
Модель
шагового
двигателя
Угол Номинальное Номиналь Удержива- Момент Инерция
шага напряжение, -ный ток, ющий фиксации, ротора,
(град.)
(В)
(А)
момент,
(г·см )
(г/см2)
(кг·см)
42HS34-1704
1.8
2.2
1.7
2.8
200
34
42HS40-0404
1.8
12.0
0.4
4.2
220
54
Рисунок 2 – Драйвер управления шаговым двигателем