
























 Электроника
ЭлектроникаПохожие презентации:
")









Автоматизация и роботизация. 5 класс
1.
Простые механизмы• Механизмы - это устройства, позволяющие
облегчить труд человека, создающие удобства в
работе.
• Простые механизмы созданы в древние века
2.
3.
Архимед• Древнегреческий математик,
физ
ик и инженер.
• Заложил основы механики,
гидростатики, автор ряда важных
изобретений.
• Архимед изобрел машину для
подъема воды («архимедов винт»),
системы рычагов и блоков для
поднятия больших тяжестей.
около 287-212г. до н. э.
4.
Изобретения Архимеда• Сконструированные Архимедом катапульты метали
камни в корабли захватчиков, на их головы неслись тучи
копий и дротиков из метательных машин.
5.
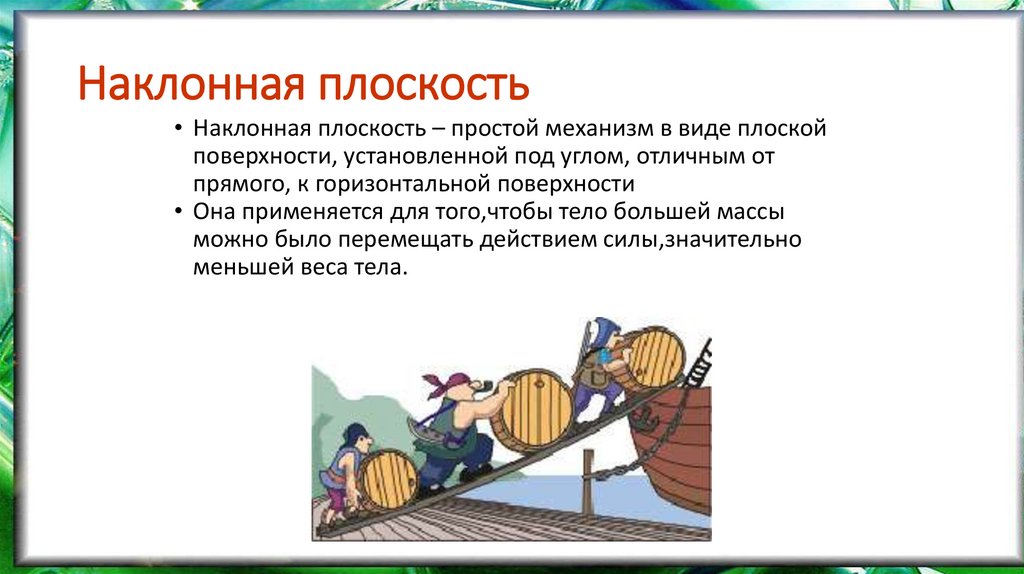
Наклонная плоскость• Наклонная плоскость – простой механизм в виде плоской
поверхности, установленной под углом, отличным от
прямого, к горизонтальной поверхности
• Она применяется для того,чтобы тело большей массы
можно было перемещать действием силы,значительно
меньшей веса тела.
6.
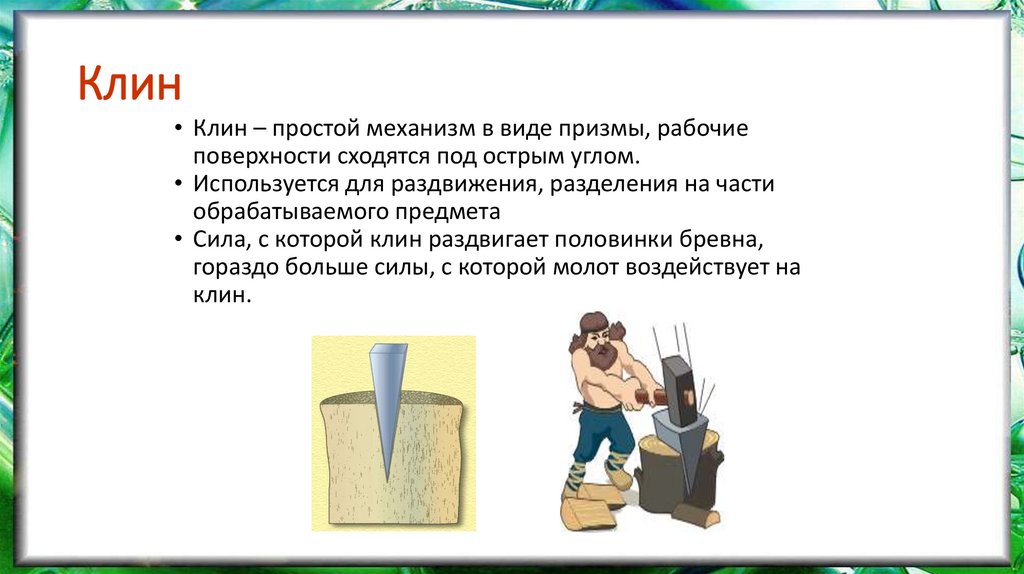
Клин• Клин – простой механизм в виде призмы, рабочие
поверхности сходятся под острым углом.
• Используется для раздвижения, разделения на части
обрабатываемого предмета
• Сила, с которой клин раздвигает половинки бревна,
гораздо больше силы, с которой молот воздействует на
клин.
7.
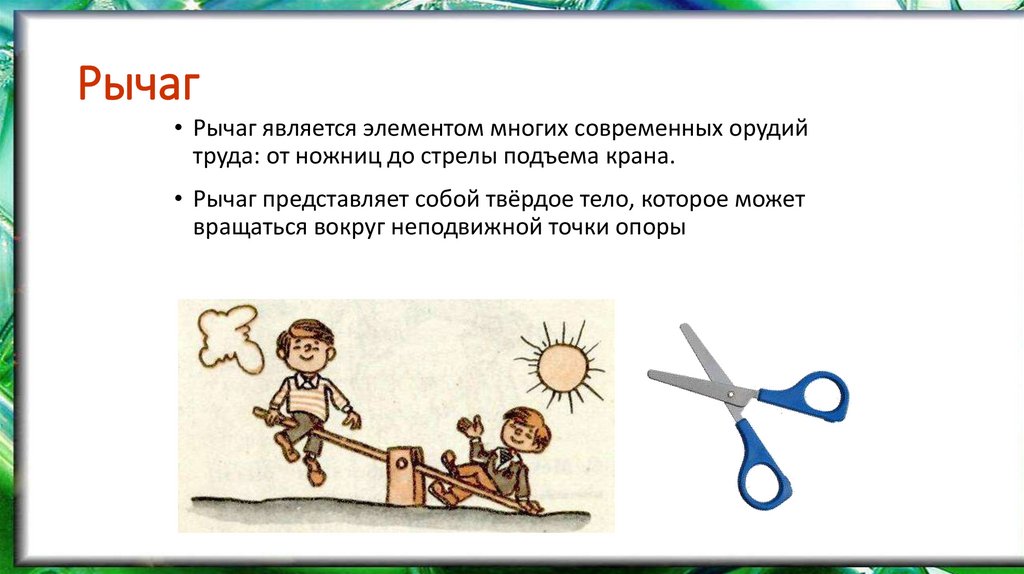
Рычаг• Рычаг является элементом многих современных орудий
труда: от ножниц до стрелы подъема крана.
• Рычаг представляет собой твёрдое тело, которое может
вращаться вокруг неподвижной точки опоры
8.
Блок• Блок-это колесо с желобом по окружности для каната,
троса или цепи.
• Блоки применяются в грузоподъемных устройствах.
• Виды блоков: неподвижный и подвижный
1. неподвижный
2. подвижный
9.
Простейший механизм для гашения билетов.(Слово из 9 букв)
•Раньше этот предмет висел во всех автобусах и
троллейбусах до появления кондукторов.
•Трамвайный «дырокол».
•Аппарат, превращающий зайца в человека
КОМПОСТЕР
10.
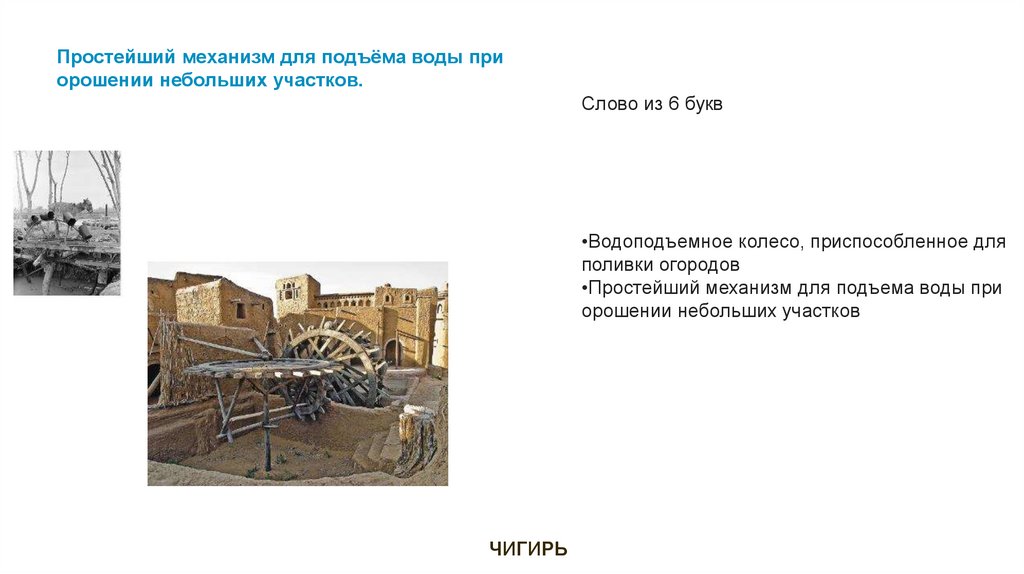
Простейший механизм для подъёма воды приорошении небольших участков.
Слово из 6 букв
•Водоподъемное колесо, приспособленное для
поливки огородов
•Простейший механизм для подъема воды при
орошении небольших участков
ЧИГИРЬ
11.
Механизм для подъёма тяжестей на небольшуювысоту.
7 букв
•Работает на повышение.
•Приподниматель машины.
•Устройство, необходимое при установке запаски.
ДОМКРАТ
12.
Приспособление для подъёма воды из колодца —длинный шест, служащий рычагом.
7 букв
•Птица над колодцем.
•Птица, гостившая у Лисы.
•«Птица», которая вёдра из колодца достаёт.
ЖУРАВЛЬ
13.
Автомат(автоматическое устройство) это техническое устройство,
работающее целенаправленно без непосредственного участия
человека.
14.
Виды автоматических устройств• Автоматы
• Механические
• Электромеханические
• Электронные
• Термоэлектрические
15.
Механическое устройство16.
Электромеханическое устройство17.
Электронные устройства18.
Термоэлектрические устройства• Термоэлектрический модуль компьютера
19.
Что такое робот?• Термин «робот» ввёл в обиход чешский писатель Карел Чапек.
Хотя сначала в своей пьесе он назвал человекоподобных
механизмы «лаборами» (от латинского labor работа), это слово
ему не понравилось. Тогда по совету брата Йозефа он
переименовал их в роботов. Кстати, по-чешски исходное для
этого неологизма слово robota означает не просто работу, а
тяжёлую работу или каторгу.
• Ро́бот (чеш. robot, от robota подневольный труд или rob раб)
автоматическое устройство, предназначенное для осуществления
производственных и других операций, обычно выполняемых
человеком
20.
Цель создания роботов –создание
эффективного помощника,
способного совершать
операции по достижению целей,
поставленных человеком.
Иными словами
главная цель создания роботов освободить человека от однотипной,
рутинной работы.
21.
Робот – объект в котором естьтри взаимосвязанных элемента:
1.
Датчиковая система, при помощи
которой робот наблюдает за
окружающей средой
2.
Информационная управляющая
система, в которую подаются сигналы с
датчиковой системы и на основе этих
данных формируется управляющее
воздействие
3.
Исполнительная система – может быть
любой например для перемещения
робота и манипулирования
предметами или собирания
информации об окружающем мире
22.
Первые прообразы роботовДревнегреческий математик и изобретатель Архит Тарентский
еще в 5 веке до н. э. изобрел деревянного голубя, который
запускался в небо с помощью паровой катапульты.
Архимед - древнегреческий учёный и
математик в 3 веке н. э.
23.
24.
Тип выполняемой работы.• 1.промышленные
• 2. строительные
• 3. сельскохозяйственные
• 4. транспортные
• 5. бытовые
• 6. боевые
• 7. охранные
• 8. исследовательские
• 9.Медицинские
• 10.Андроиды
• 11.Космические
25.
Строительные роботыэто электрическая дистанционно управляемая
машина, с мощным манипулятором и
разнообразным навесным оборудованием.
В основном используются для проведения
строительных и подрывных работ, сноса
зданий, расчистки площадок под застройку,
выполнения опасных работ.
Позволяют увеличить производительность
труда и свести к минимуму производственный
травматизм. Роботы очень маневренны, у них
отсутствуют выхлопные газы. Оператор может
работать с ними в любых условиях без
нарушения техники безопасности: в узких
тоннелях, подвалах, на краю высотных
конструкций, рядом с ветхими перекрытиями,
на реконструируемых мостах и виадуках и т.д.
26.
Промышленные роботыАвтоматизация производства – позволяет
обеспечить полный цикл обработки с
высокой производительностью и
точностью. Позволяет избегать перерывы
и ошибки, свойственные человеку.
Применяется в автомобильной,
электротехнической, электронной,
металлообрабатывающей, машинной
промышленности, при производстве
продовольственных и других товарах.
Способны выполнять любые
технологические операции: перемещение
и сборка, сварка, нанесение защитного
слоя, чертёжные работы, обработка
древесины, металла и других материалов.
27.
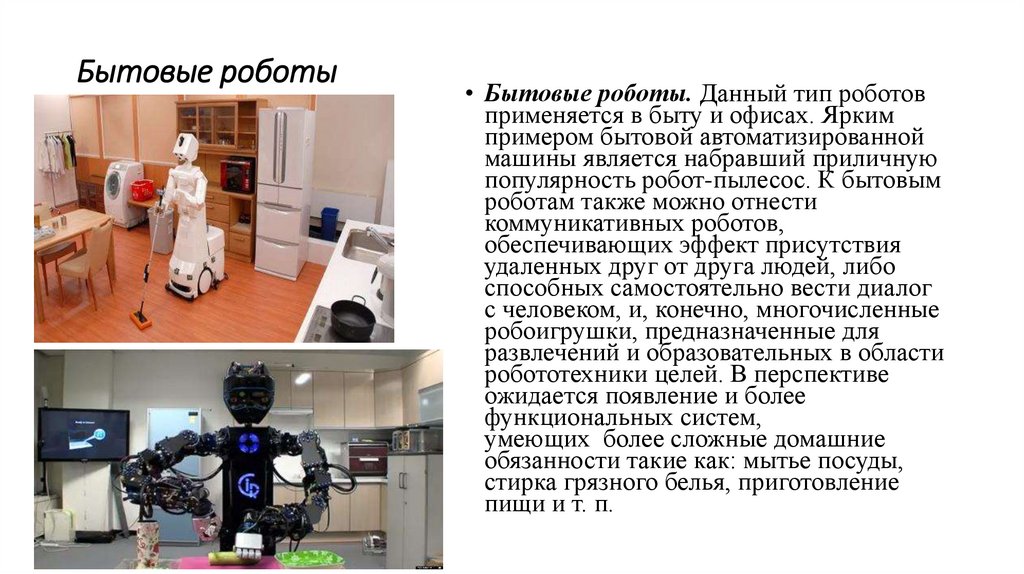
Бытовые роботы• Бытовые роботы. Данный тип роботов
применяется в быту и офисах. Ярким
примером бытовой автоматизированной
машины является набравший приличную
популярность робот-пылесос. К бытовым
роботам также можно отнести
коммуникативных роботов,
обеспечивающих эффект присутствия
удаленных друг от друга людей, либо
способных самостоятельно вести диалог
с человеком, и, конечно, многочисленные
робоигрушки, предназначенные для
развлечений и образовательных в области
робототехники целей. В перспективе
ожидается появление и более
функциональных систем,
умеющих более сложные домашние
обязанности такие как: мытье посуды,
стирка грязного белья, приготовление
пищи и т. п.
28.
Бытовые роботыКатегории
Роботы для чистки бассейна
Роботы снегоуборщики
Роботы для чистки аквариумов
Роботы мойщики окон
Роботы для охраны и безопасности
Робот пылесос
29.
Медицинские роботыДавно и широко используются в медицине для диагностики и
хирургических вмешательств. Имеют свои преимущества и недостатки.
+ имеют бОльшую доступность
в сравнении с лапароскопическими инструментами
+ более точное движение инструмента
+ выводит изображение на экран
+ бионические протезы
(управляются собственной
нервной системой человека)
- Отсутствие обратной связи
(врачу необходимо тщательно
отслеживать свои движения,
чтобы не повредить ткани)
- Узкое операционное поле
30.
Сельскохозяйственныероботы
• Сельскохозяйственные
роботы предназначены для
выполнения трудоемких и
монотонных процессов в
сельском хозяйстве. В настоящее
время ведется интенсивная
разработка таких роботов, и
даже есть примеры их
использования, например, в
Японии.
31.
Транспортныероботы
• Транспортные
роботы используются, как
следует из наименования для
автоматического перемещения
грузов, либо автономного
управления различными
транспортными средствами.
Транспортными роботами
являются самоходные
тележки, автопилоты и т.д.
32.
Боевые (военные)роботы
• Боевые (военные)
роботы призваны вывести
вооруженные конфликты на
качественно иной уровень и
предназначены для минимизации
непосредственного
участия человека в боевых
действиях с целью сокращения
или исключения вовсе людских
потерь, а также для работы в
условиях, несовместимых с
возможностями человека в
военных целях.
33.
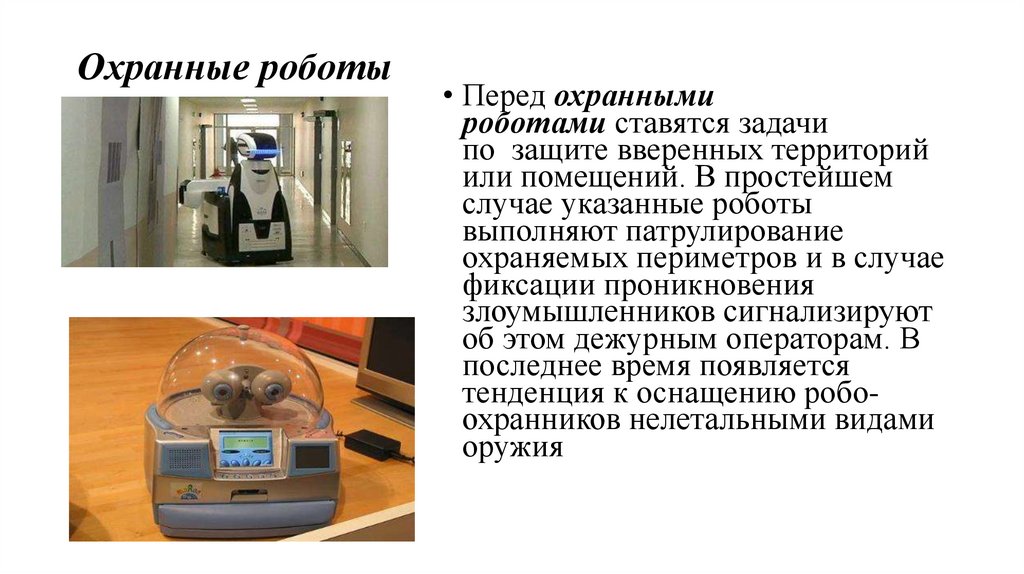
Охранные роботы• Перед охранными
роботами ставятся задачи
по защите вверенных территорий
или помещений. В простейшем
случае указанные роботы
выполняют патрулирование
охраняемых периметров и в случае
фиксации проникновения
злоумышленников сигнализируют
об этом дежурным операторам. В
последнее время появляется
тенденция к оснащению робоохранников нелетальными видами
оружия
34.
Космические роботыКосмороботы – это роботы,
приспособленные работать
в космическом пространстве.
Могут использоваться для
исследовательских, спасательных
ремонтных работ
в неблагоприятных условиях.
35.
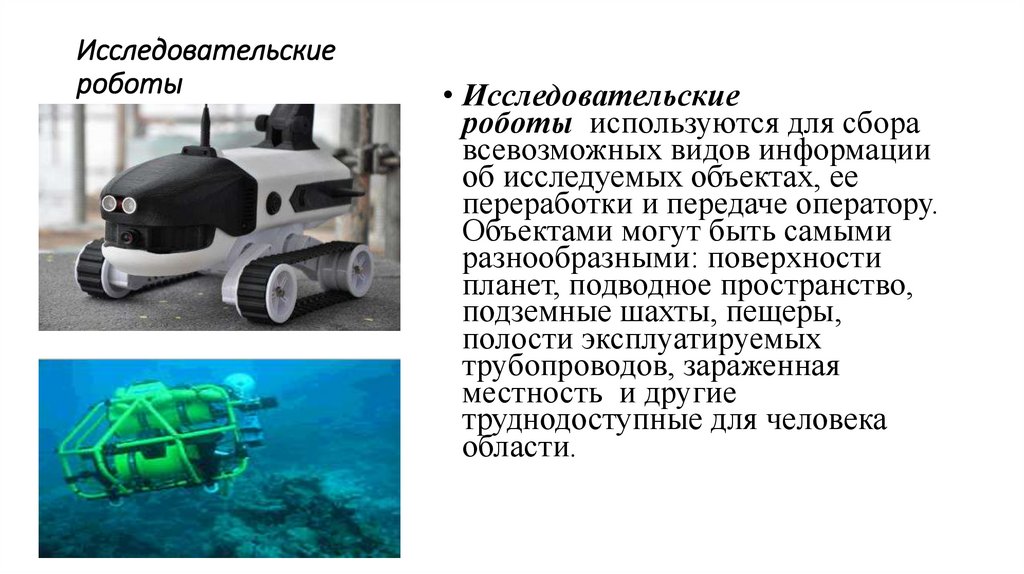
Исследовательскиероботы
• Исследовательские
роботы используются для сбора
всевозможных видов информации
об исследуемых объектах, ее
переработки и передаче оператору.
Объектами могут быть самыми
разнообразными: поверхности
планет, подводное пространство,
подземные шахты, пещеры,
полости эксплуатируемых
трубопроводов, зараженная
местность и другие
труднодоступные для человека
области.
36.
Андроидыот греч. слова «человек»
и суффикса -oid («подобие») — человекоподобный
Могут выполнять функции как бытовых,
Так и военных и промышленных роботов.
А также могут летать в космос.
37.
Тип управления.• Можно выделить три класса:
• 1. Управляемые оператором.
• 2. Полуавтономные.
• 3. Автономные.
38.
Управляемые оператором• Роботы, управляемые оператором, не способны
самостоятельно думать, принимать решения и даже
производить собственные вычисления. По сути это
просто дистанционно или прямо управляемые машины. К
данной категории роботов можно отнести копирующие
движения органов управления роботы (простые
манипуляторы или роботы андроидного типа),
экзоскелеты, роботы, управляемые человеком с пульта
управления.
39.
Полуавтоматические роботы• В полуавтоматических роботах ручное управление сочетается с
автоматическим. Используется, когда заранее жестко
запрограммировать все нужные операции невозможно, а
оснащать робота искусственным интеллектом нецелесообразно
или невозможно. К полуавтоматическим относятся роботы,
которые выполняют определенный запрограммированный набор
действий, однако существует
необходимость вмешательства оператора для сообщения ему
дополнительной информации (например, с помощью
целеуказания, указания требуемой последовательности действий
и т. д.).
40.
Автономные роботы• Автономные роботы – это, как следует из наименования, роботы,
запрограммированные на самостоятельные действия, без участия
человека. К таковым машинам можно отнести как промышленные
роботы, занятые выполнением последовательности технологических
операций, так и машины, обладающие полноценным искусственным
интеллектом. Предельным вариантом автономных роботов являются
андроиды или киборги, которые являются героями многочисленных
фантастических фильмов. Очевидно, что именно этот класс машин
является апогеем развития робототехники и при массовом
распространении позволит полноценно взять на себя все наши
повседневные бытовые заботы и просто быть незаменимым
помощником в любых делах.
41.
Степень мобильностиПо степени мобильности выделяются
два класса:
• Стационарные
• Мобильные
42.
Современные роботыAIBO
Айбо
ASIMO
Асимо
NAO (Нао)
43.
Современные роботы44.
Простые механизмы - презентация онлайн (ppt-online.org)Автоматические устройства | Презентация к уроку по технологии (7 класс) на тему: |
Образовательная социальная сеть (nsportal.ru)
Презентация на тему "Введение в
робототехнику". | Презентация к уроку на тему: |
Образовательная социальная сеть (nsportal.ru)
Презентация к уроку на тему "Робототехника" (multiurok.ru)
Презентация "Знакомство с робототехникой",
автор Авринская Юлия Викторовна (ya-odarennost.ru)
Урок 1. Роботы и робототехника — презентация на SlideShare.ru