









































 Военное дело
Военное делоПохожие презентации:


")


: история, понятие, назначение, функции")




БПЛА. Введение
1.
БПЛА. Введение.БЛА (БПЛА)/UAV — Беспилотный Летательный
Аппарат/Unmanned Aerial Vehicles (любой).
2.
Что такое квадрокоптер?Квадрокоптер – разновидность мультикоптера.
Мультикоптер
–
многомоторный
или
мультироторный
летательный аппарат (вертолет), несущие винты которого
осуществляют вращение диагонально в противоположных
направлениях.
Различаются мультикоптеры по количеству моторов (или по
количеству несущих винтов).
В настоящее время применение получили мультикоптеры с тремя
и более несущими винтами.
3.
Примеры современных мультироторных решений4.
Примеры современных мультироторных решений5.
Примеры современных мультироторных решений6.
Примеры современных мультироторных решений7.
Из историиВсе началось в далеком 1922 году с русско-американского авиаконструктора
Георгия Александровича Ботезат. Который изобрел первый в своем роде
действующий квадрокоптер. Его аппарат смог не только оторваться от земли, но
и продержаться в воздухе некоторое время. На тот момент такие аппараты имели
один существенный недостаток – принцип работы.
8.
Из историиИз четырёх несущих винтов, ведущим был лишь один (вращение задавалось
двигателем внутреннего сгорания), т.е. крутящий момент посредством сложной
трансмиссии, передавался одним мотором на остальные 3 несущих винта. До
серийных разработок дело не дошло. А такие изобретения как «Хвостовой винт»
и «Автомат перекоса» заставили полностью отказаться от разработок
многороторных летательных аппаратов, впоследствии чего позднее был создан
первый в мире вертолёт.
9.
Что такое дрон?БПЛА (БЛА/UAV) — беспилотный летательный
аппарат, дрон. До начала 21 века применялся
исключительно в военных целях. С недавнего
времени беспилотники получили широкое
применение как в быту, так и в бизнесе.
Дрон — в технологическом контексте это беспилотный летательный аппарат. По существу,
беспилотный летающий робот.
Беспилотники могут управляться дистанционно, а могут летать автономно с помощью
встроенного программного обеспечения (плана полета), работающего в тесной связи с
бортовыми сенсорами и системами GPS.
В настоящее время дроны получили широкое гражданское применение, начиная от поисковоспасательных операций, наблюдения, мониторинга погоды, трафика, тушение пожаров, в
личных целях, бизнесе с акцентом на фото и видео съемку, в сельском хозяйстве и в службах
доставки грузов.
10.
Историческая справка. Аэростаты11.
Историческая справка. Бомба с крыльями12.
Историческая справка. Бомба с крыльями13.
Историческая справка. Первый беспилотный самолет14.
Историческая справка. Первый беспилотный самолет15.
Исторические факты• В конце 2012 года, Крис Андерсон, уходит с поста главного редактора журнала «Wired», чтобы
посветить себя дронам в компании 3DRobotics Inc. Позднее в стенах этой компании был
впервые написан уникальный код полёта APM, на базе которого был реализован известный
автопилот высокого класса – Pixhawk. На текущий момент компания специализируется в
области БПЛА и реализует свои передовые решения в таких сферах как фото и видеосъемка,
строительство, коммунальные услуги, телекоммуникационные услуги, а так же в обеспечении
общественной безопасности.
• В конце 2013 года, известная публичная компания «Amazon» одна из первых начала
использовать в тестовом режиме коммерческие беспилотники для доставки продаваемой
продукции. Позже в 2016 году эту идею поддержали: Политехнический университет Виргинии
и Государственный институт совместно с холдингом Alphabet Inc на примере тестового проекта
«Wing», целью которого являлось реализовать доставку купленных в интернете товаров либо
предметов первой необходимости с помощью дронов.
16.
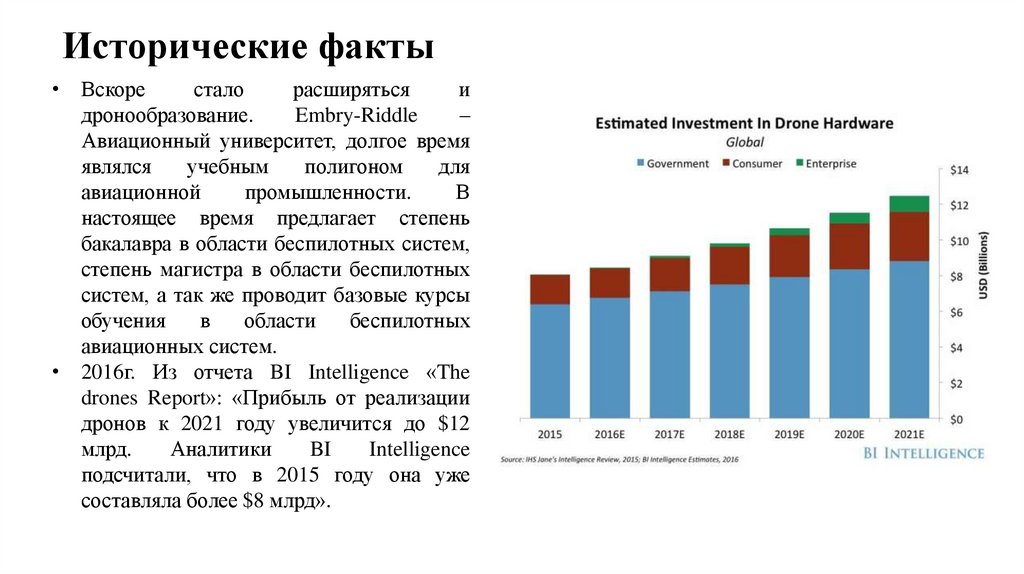
Исторические факты• Вскоре
стало
расширяться
и
дронообразование.
Embry-Riddle
–
Авиационный университет, долгое время
являлся
учебным
полигоном
для
авиационной
промышленности.
В
настоящее время предлагает степень
бакалавра в области беспилотных систем,
степень магистра в области беспилотных
систем, а так же проводит базовые курсы
обучения
в
области
беспилотных
авиационных систем.
• 2016г. Из отчета BI Intelligence «The
drones Report»: «Прибыль от реализации
дронов к 2021 году увеличится до $12
млрд.
Аналитики
BI
Intelligence
подсчитали, что в 2015 году она уже
составляла более $8 млрд».
17.
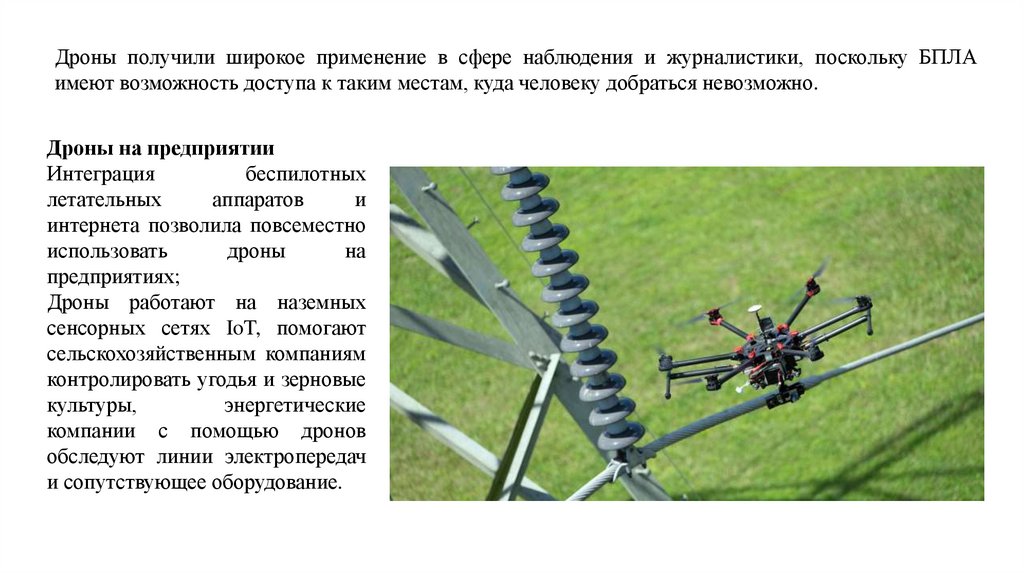
Дроны получили широкое применение в сфере наблюдения и журналистики, поскольку БПЛАимеют возможность доступа к таким местам, куда человеку добраться невозможно.
Дроны на предприятии
Интеграция
беспилотных
летательных
аппаратов
и
интернета позволила повсеместно
использовать
дроны
на
предприятиях;
Дроны работают на наземных
сенсорных сетях IoT, помогают
сельскохозяйственным компаниям
контролировать угодья и зерновые
культуры,
энергетические
компании с помощью дронов
обследуют линии электропередач
и сопутствующее оборудование.
18.
Военные дроны19.
Военные дроны20.
Военные дроны21.
Военные дроны22.
Военные дроны23.
Военные дроны24.
Военные дроны25.
Коммерческие дроны26.
Коммерческие дроны27.
Коммерческие дроны28.
Коммерческие дроны29.
Коммерческие дроны30.
Коммерческие дроны31.
Коммерческие дроны32.
Коммерческие дроны33.
Гражданские дроны34.
Гражданские дроны35.
Гражданские дроны36.
Гражданские дроны37.
Гражданские дроны38.
Гражданские дроны39.
Гражданские дроны40.
Основные компоненты мультикоптеров• Аккумуляторная батарея – литий полимерная (LiPo), реже литий-ионная (LiIon).
• Бесколлекторные либо коллекторные двигатели на редкоземельных элементах.
• Контроллер дистанционного управления (Пульт управления/Аппаратура/Трансмиттер).
41.
Принцип действияВ зависимости от схемы применения (3/4/6/8-несущих винтов) каждый несущий
винт приводится во вращение эл.двигателем (эл.мотором).
Одна половина моторов осуществляет вращение винтов по часовой стрелки, а
вторая против.
Благодаря такому подходу для осуществления управления мультикоптером не
требуется применение в конструкции дрона хвостового винта и сложного в
работе автомата перекоса.
42.
Порядок направления вращения несущих винтов мультикоптера43.
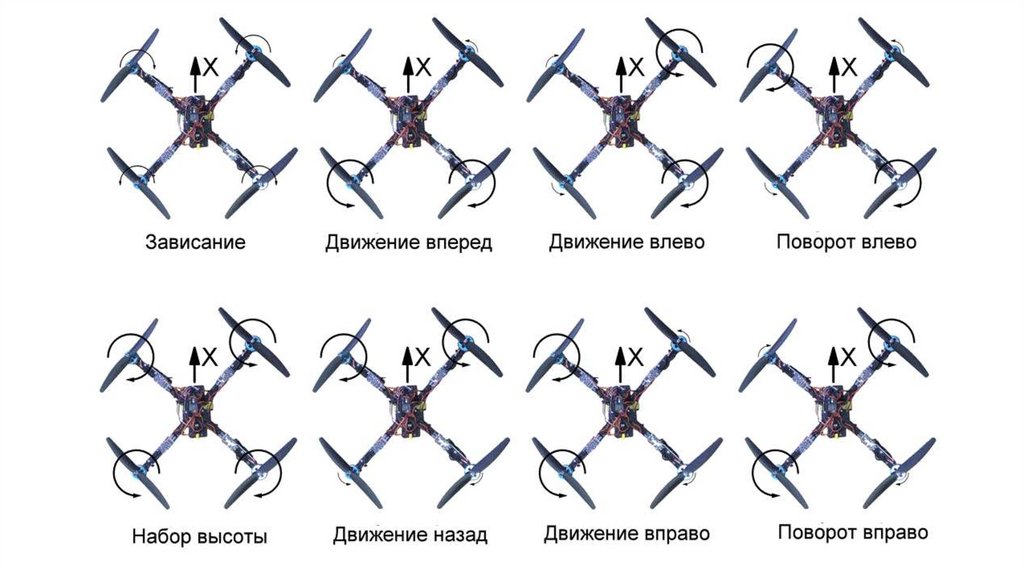
Пример управления полётом• Увеличение оборотов на всех несущих винтах – подъём.
• Уменьшение оборотов на всех несущих винтах — снижение.
• Увеличение оборотов одной половины винтов и уменьшении оборотов другой
половины – задаст движение в сторону.
• Увеличение оборотов у винтов с вращением по часовой стрелки и уменьшении
оборотов у винтов вращающихся против часовой – обеспечит поворот дрона.
44.
45.
МоторыНа современных мультикоптерах (дронах) в настоящий момент применяются два
типа электромоторов — коллекторные и бесколлекторные.
Бесколлекторными в основном оснащают дорогие и профессиональные дроны.
Коллекторными же моторами оснащают только бюджетные варианты, игрушки.
46.
УправлениеУправление мультикоптером осуществляется контроллером дистанционного
управления (он же пульт управления, аппаратура, трансмиттер) посредством
исходящих радиоволн (как правило, на частотах 2.4ГГц либо 5.8ГГц).
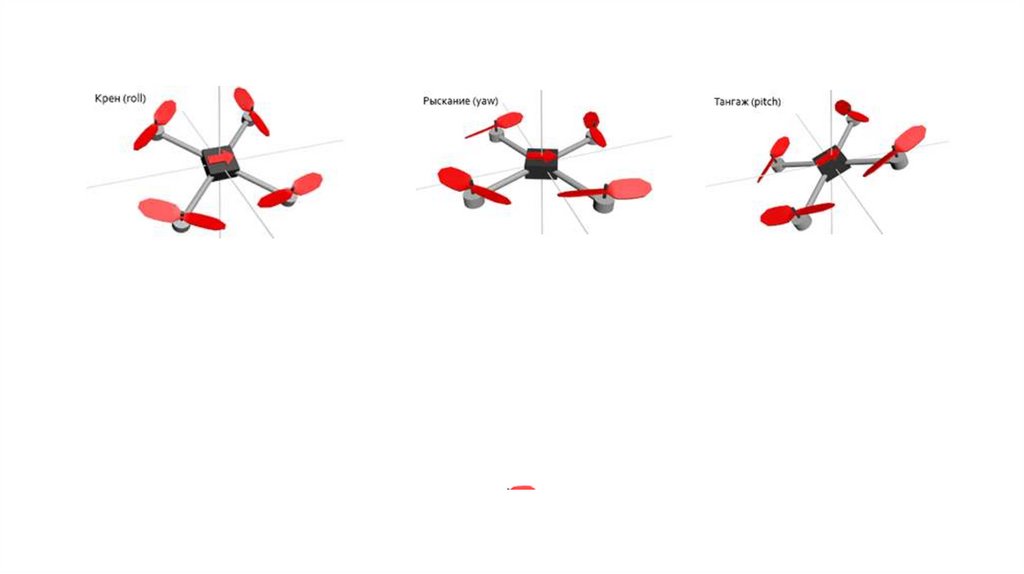
Полетный контроллер — (он же: мозги, полетная плата, компьютер, контроллер)
это устройство, которое обеспечивает полет коптера, управляя газом, креном,
тангажом и рысканьем (throttle, pitch, roll, yaw).
47.
48.
Функции полетного контроллера:• Собирает информацию с датчиков (установленных на нем или внешних: компас,
GPS, гироскопы и т.п.);
• Устанавливает/рассчитывает свое положение в пространстве, согласно датчикам;
• Собирает информацию о внешних управляющих воздействиях (отклонения стика
пилотом или следующий шаг алгоритма программы/автопилотирования);
• Рассчитывает неувязки и Пропорционально-Интегрально-Дифференциальные
(PID) коэффициенты, в соответствие с прошивкой/программой автопилотирования
или ручного управления;
• Отправляет
управляющие/корректирующие
механизмы (на регуляторы оборотов).
сигналы
на
исполнительные
49.
Принцип работыПолетный контроллер отдает команды регуляторам оборотов посредством
широтноимпульсной модуляции (ШИМ/PWM), где режим регулятора задается
длительностью импульсов, либо по последовательному интерфейсу Inter-Integrated
Circuit (IIC/I2C), где режим регулятора задается цифровыми сигналоми: первый —
определяет адрес устройства, второй — задает значение от 0 до 255. Чаще всего
используется метод PWM.
50.
Управление• Гироскоп – отвечает за стабильное поведение дрона в процессе полёта (как
правило, обеспечивает стабилизацию по 6 осям направления).
• Акселерометр – с помощью этого сенсора процессор может устанавливать
дрон в горизонтальное положение относительно земли.
• Барометрический сенсор (барометр) – обеспечивает дрону стабильное
зависание на выбранной пилотом высоте.
• Сонар (ультразвуковой сенсор) – обеспечивает автоматическую посадку и
удержание незначительной высоты (1.5 – 3.5 метров), может применяться так
же для облёта препятствий.
• GPS модуль – обеспечивает географическое позиционирование дрона,
посредством полученных данных со спутниковых систем. Благодаря его
присутствию реализуется функция полёта по точкам, возврат в место взлёта в
случае потери связи, либо низкого заряда АКБ, а так же позволяет снимать
показания полёта, как на момент полета, так и после.
51.
Простейшая схема устройства квадрокоптера52.
Какие бывают?• Для новичков
• Любительские
• Профессиональные