

 Промышленность
ПромышленностьПохожие презентации:










Синтез корректирующих устройств двухконтурного скоростного следящего электропривода постоянного тока
1.
Министерство науки и высшего образования РФФГБОУ ВО «Казанский государственный энергетический университет»
Кафедра «Электротехнические комплексы и системы»
Выпускная квалификационная работа
на тему:
«СИНТЕЗ КОРРЕКТИРУЮЩИХ УСТРОЙСТВ ДВУХКОНТУРНОГО СКОРОСТНОГО
СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА»
Выполнил:
студент гр. ЭМК-1-18
Валиуллов Эмиль Фарисович
Руководитель:
Доцент кафедры ЭТКС
к.т.н., доцент Бутаков Валерий Михайлович
.
Казань, 2022
2.
Актуальность работы• Актуальность
темы
подтверждается
тем,
что
электроприводы нашли в настоящее время широкое
применение в различных областях науки и техники.
Автоматизация процессов функционирования различных
механизмов
невозможна без широкого применения
электроприводов - управляемых электромеханических
систем, среди которых широкое применение нашли
следящие электроприводы постоянного тока.
3.
Цель работыЦель-исследование особенностей синтеза корректирующих устройств для
двухконтурного скоростного следящего электропривода постоянного тока
различными методами, сравнение результатов.
Задачи:
-Выбор и расчёт электродвигателя.
-Разработка корректирующих устройств при помощи метода стандартных
настроек.
-Разработка корректирующих устройств при помощи метода ЛАЧХ.
-Исследования динамической модели скоростного следящего электропривода на
персональном компьютере с использованием системы Matlab-Simulink.
-Расчёт электрических схем параллельного сумматора и ПИ-регулятора.
4.
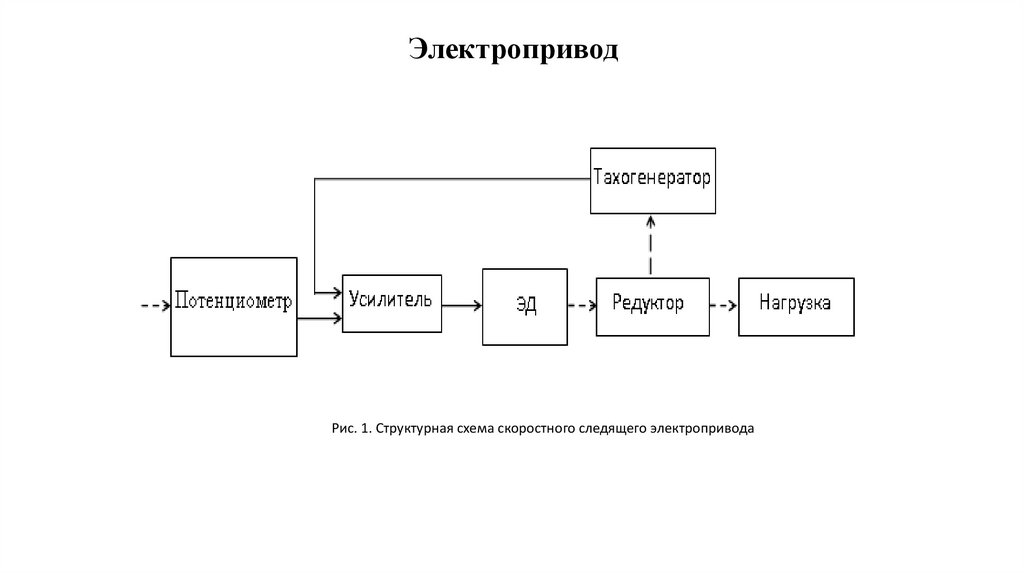
ЭлектроприводРис. 1. Структурная схема скоростного следящего электропривода
5.
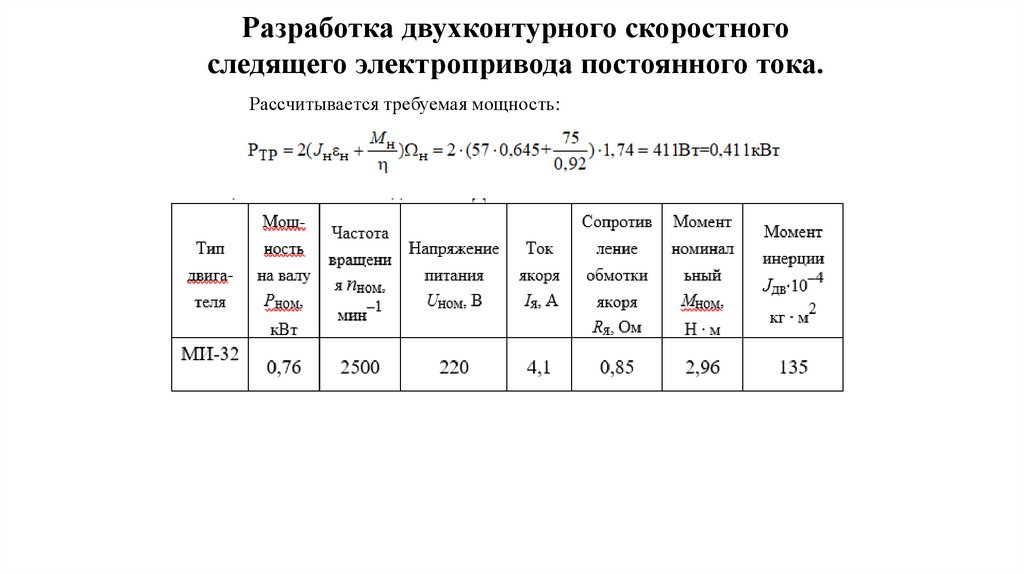
Разработка двухконтурного скоростногоследящего электропривода постоянного тока.
Рассчитывается требуемая мощность:
6.
12
3
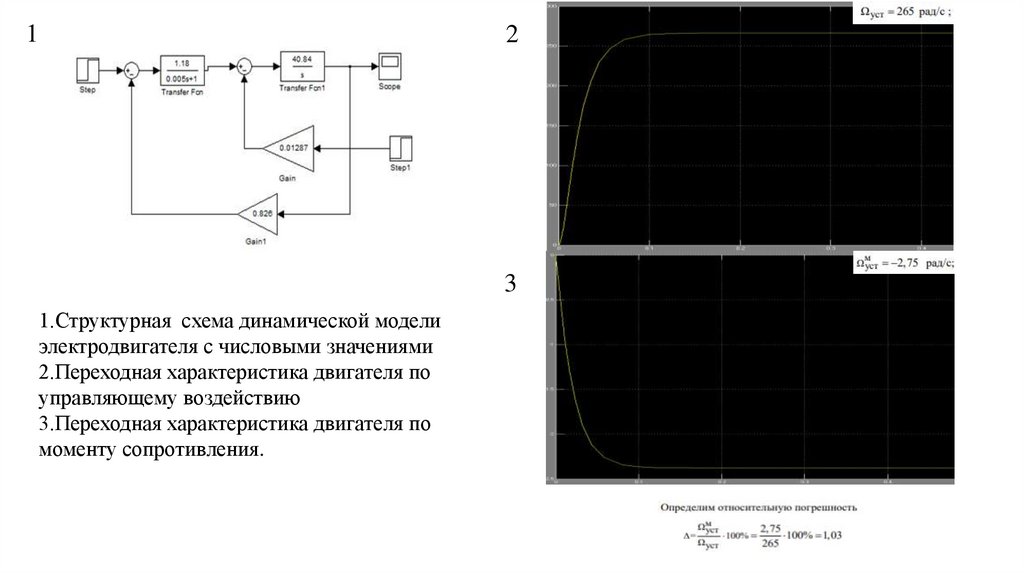
1.Структурная схема динамической модели
электродвигателя с числовыми значениями
2.Переходная характеристика двигателя по
управляющему воздействию
3.Переходная характеристика двигателя по
моменту сопротивления.
7.
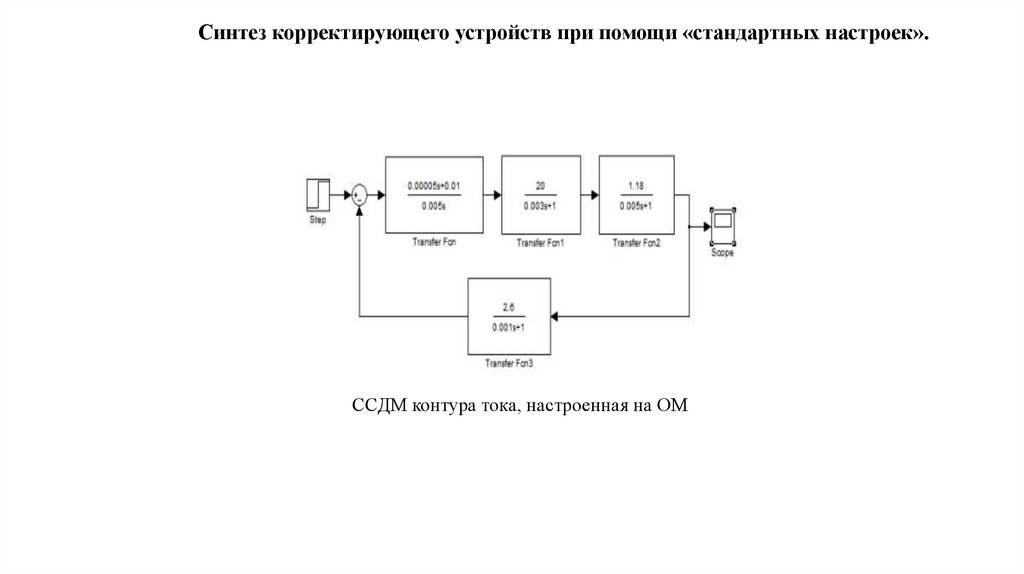
Синтез корректирующего устройств при помощи «стандартных настроек».ССДМ контура тока, настроенная на ОМ
8.
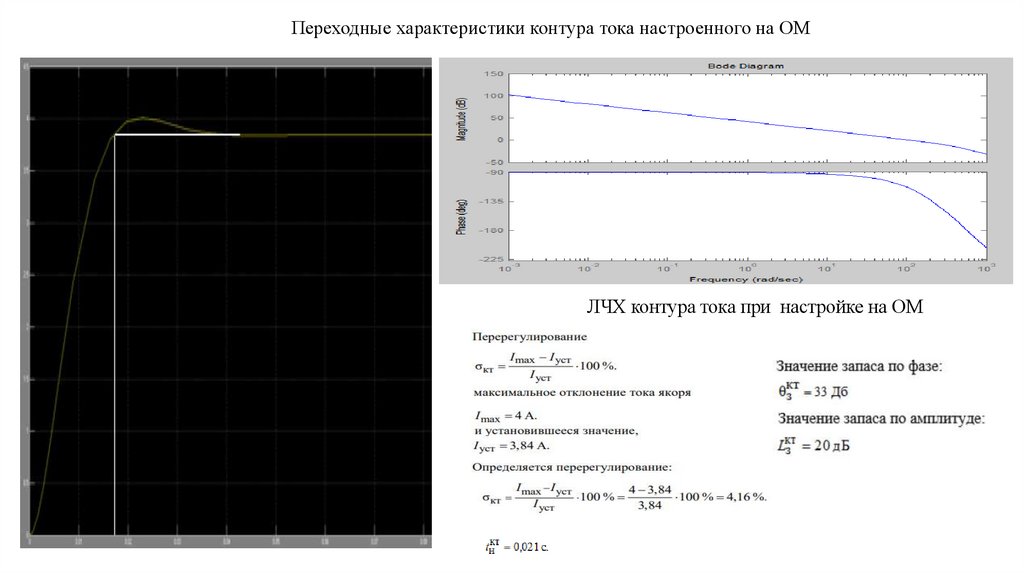
Переходные характеристики контура тока настроенного на ОМЛЧХ контура тока при настройке на ОМ
9.
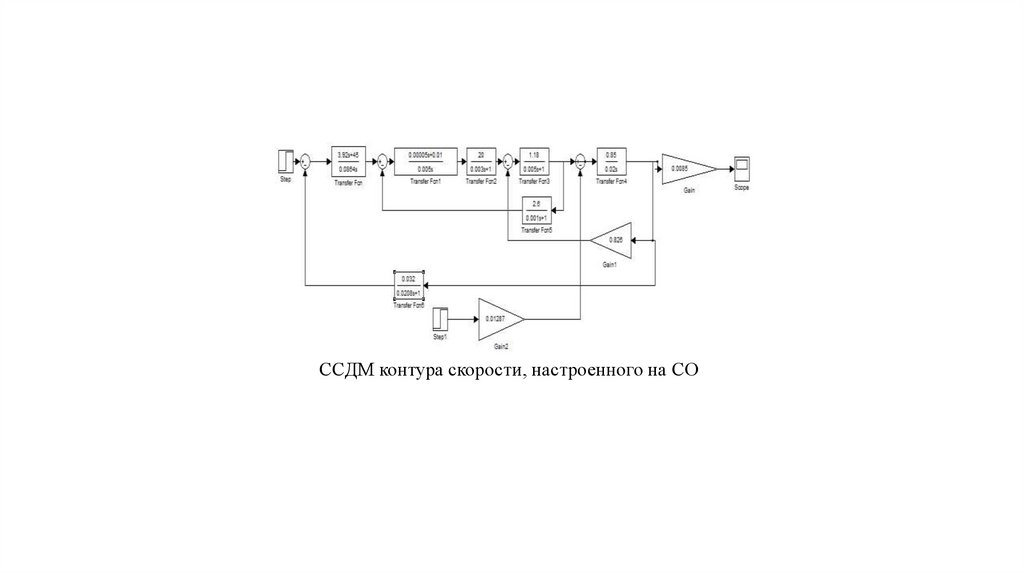
ССДМ контура скорости, настроенного на СО10.
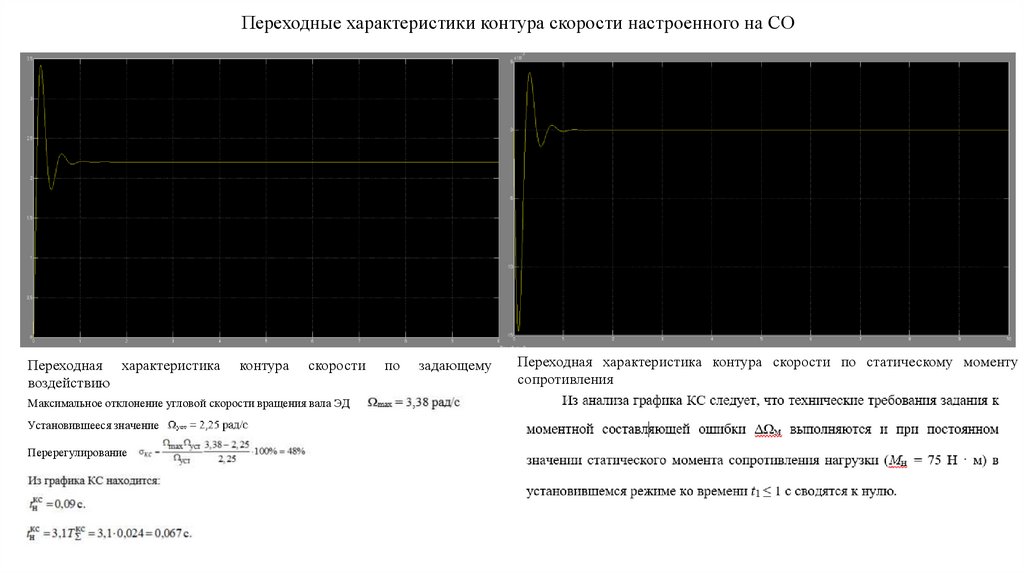
Переходные характеристики контура скорости настроенного на СОПереходная характеристика
воздействию
контура
скорости
Максимальное отклонение угловой скорости вращения вала ЭД
Установившееся значение
Перерегулирование
по
задающему
Переходная характеристика контура скорости по статическому моменту
сопротивления
11.
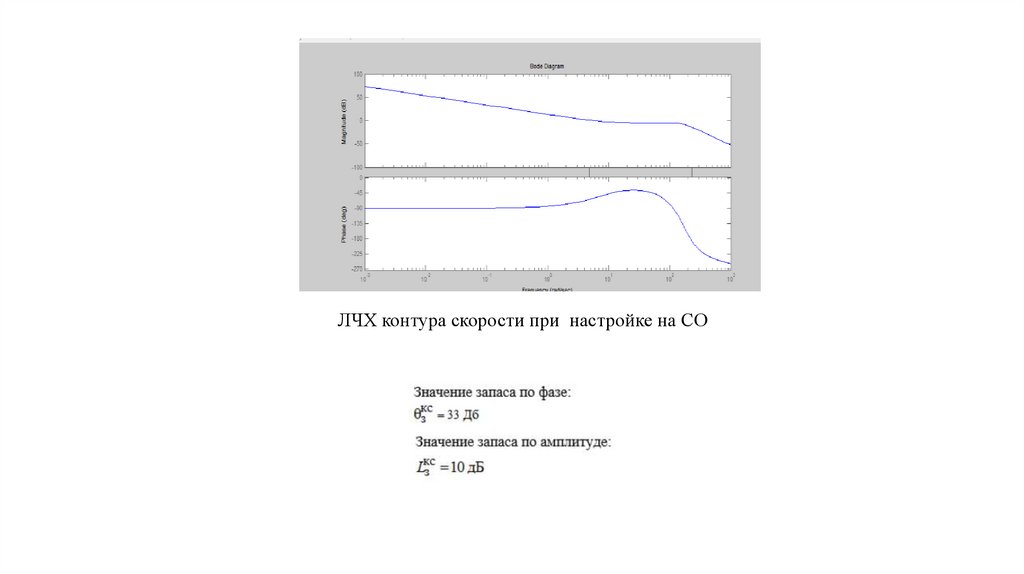
ЛЧХ контура скорости при настройке на СО12.
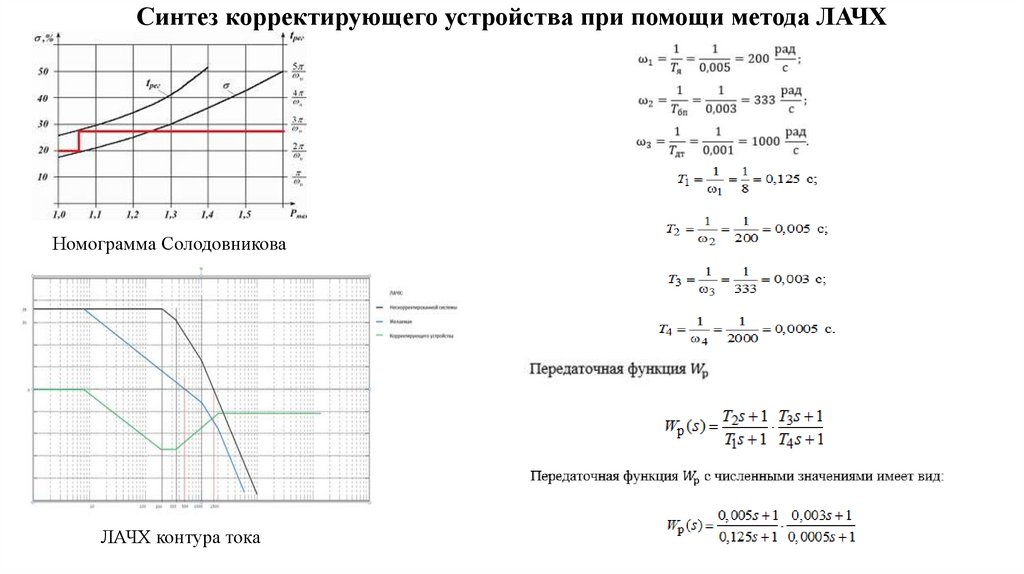
Синтез корректирующего устройства при помощи метода ЛАЧХНомограмма Солодовникова
ЛАЧХ контура тока
13.
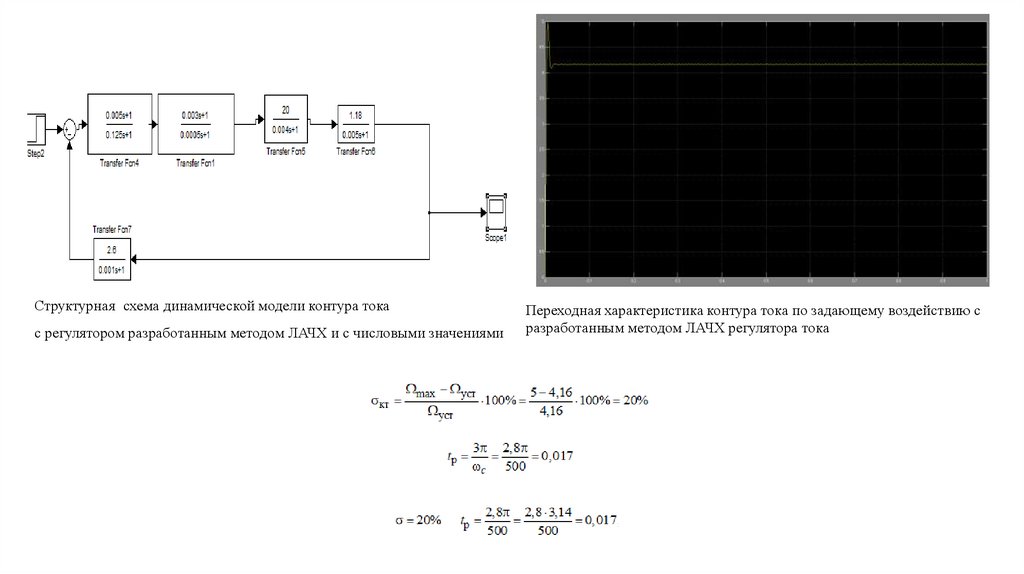
Структурная схема динамической модели контура токас регулятором разработанным методом ЛАЧХ и с числовыми значениями
Переходная характеристика контура тока по задающему воздействию с
разработанным методом ЛАЧХ регулятора тока
14.
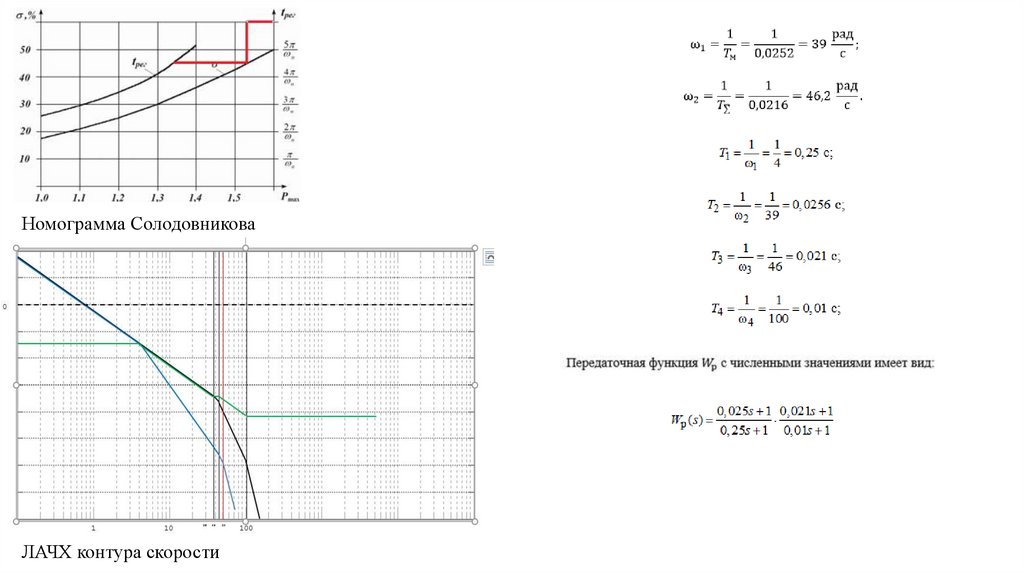
Номограмма СолодовниковаЛАЧХ контура скорости
15.
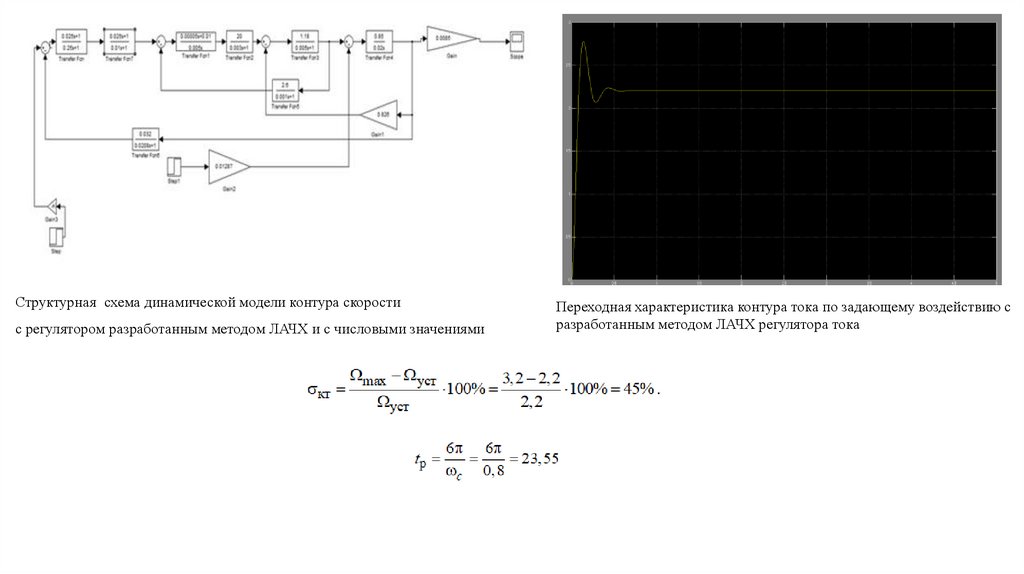
Структурная схема динамической модели контура скоростис регулятором разработанным методом ЛАЧХ и с числовыми значениями
Переходная характеристика контура тока по задающему воздействию с
разработанным методом ЛАЧХ регулятора тока
16.
Расчёт электрической схемы параллельного сумматораМодель параллельного сумматора на ОУ с числовыми значемниями
17.
Расчет электрической схемы ПИ-регулятораМодель ПИ-регулятора на ОУ с числовыми значениями
18.
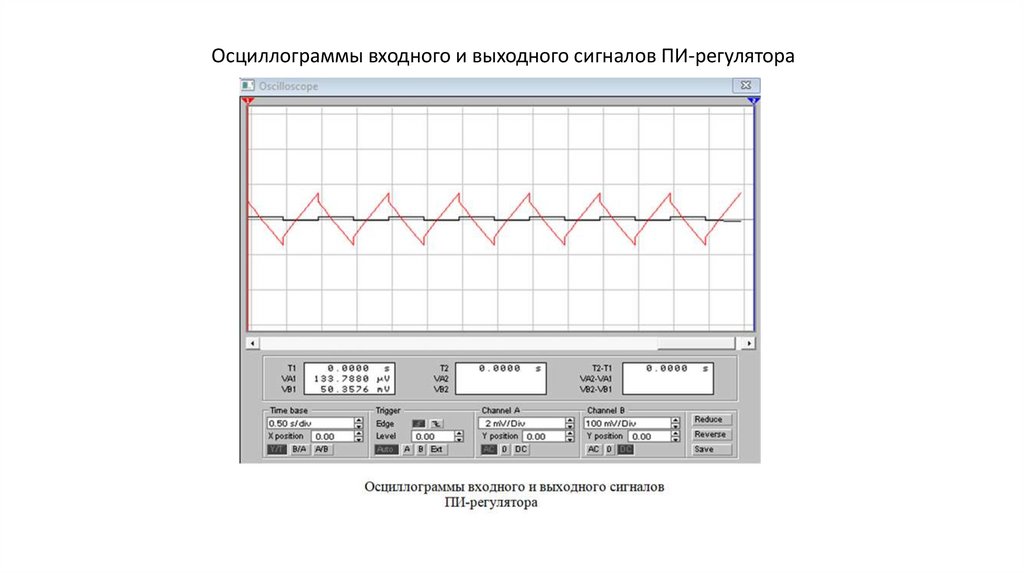
Осциллограммы входного и выходного сигналов ПИ-регулятора19.
Заключение1. Разработан двухконтурный скоростной следящий электропривод постоянного тока.
2. Произведена разработка КУ контура скорости и тока при помощи «стандартных настроек».
На основе проделанных исследований можно сделать вывод о том, что «стандартные
настройки» требуют больше вычислений и позволяют сделать настройки только на определенные
строго заданные значения.
3. Произведена разработка КУ контура скорости и тока при помощи метода ЛАЧХ.
На основе проделанных исследований можно сделать вывод, что метод ЛАЧХ является более
универсальным и предоставляет большую свободу действий.
4. Произведены расчет и моделирование электрических схем параллельного сумматора и ПИрегулятора.
Таким образом, поставленные задачи были решены в полном объеме.