

 Социология
СоциологияПохожие презентации:

")
")




")


Система обнаружения средств индивидуальной мобильности в городской среде
1.
БЕЛГОРОДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТим. В.Г. ШУХОВА
Система обнаружения
средств индивидуальной
мобильности в городской
среде
Автор: студент гр. МОБД-201 Юнг Анастасия Алексеевна
Команда: студент гр. МОБД-201 Галюзин Александр Игоревич
студент гр. МОБД-201 Высоцкий Владимир Андреевич
2.
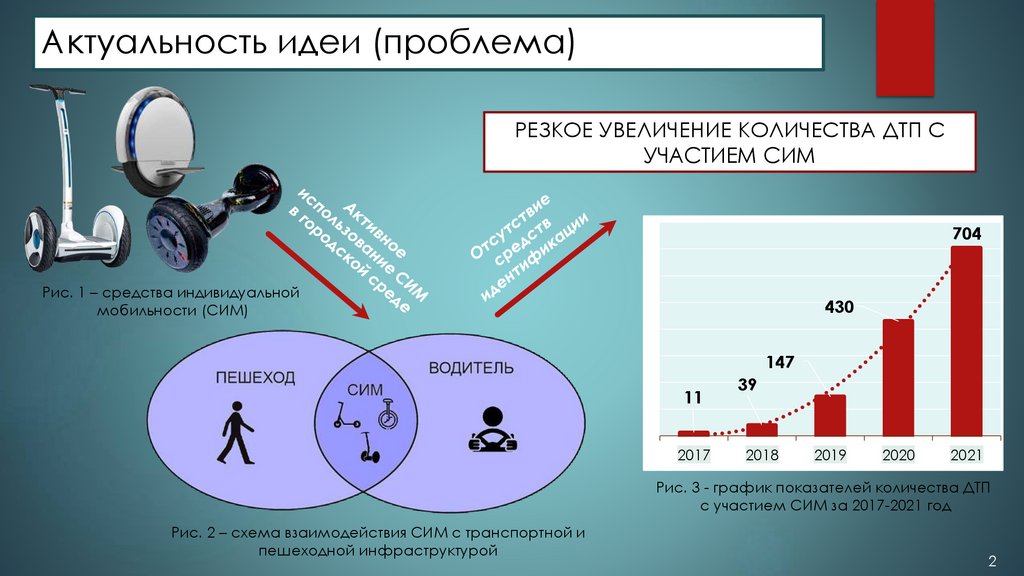
Актуальность идеи (проблема)РЕЗКОЕ УВЕЛИЧЕНИЕ КОЛИЧЕСТВА ДТП С
УЧАСТИЕМ СИМ
704
Рис. 1 – средства индивидуальной
мобильности (СИМ)
430
147
11
2017
39
2018
2019
2020
2021
Рис. 3 - график показателей количества ДТП
с участием СИМ за 2017-2021 год
Рис. 2 – схема взаимодействия СИМ с транспортной и
пешеходной инфраструктурой
2
3.
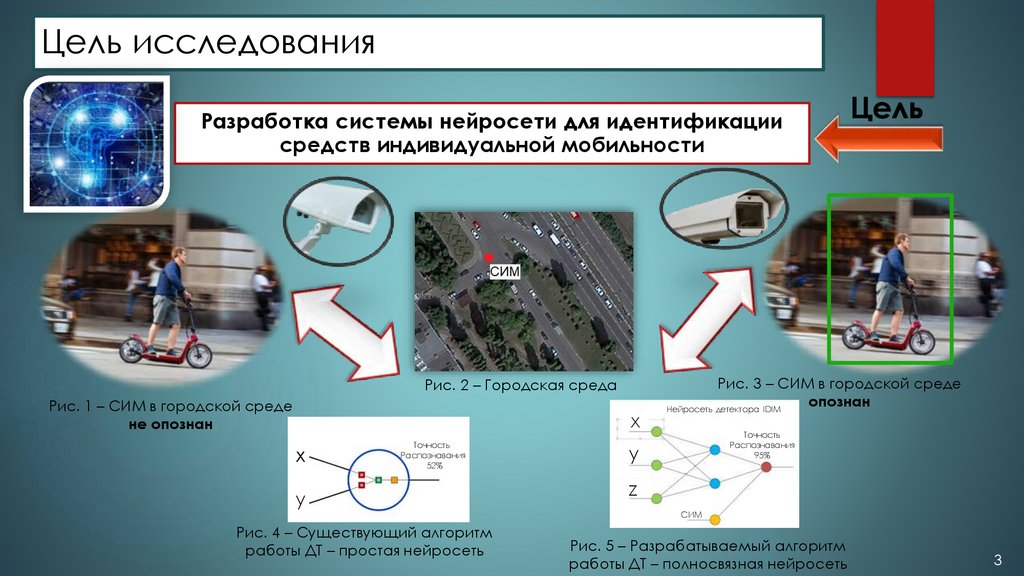
Цель исследованияРазработка системы нейросети для идентификации
средств индивидуальной мобильности
Рис. 2 – Городская среда
Рис. 1 – СИМ в городской среде
не опознан
x
x
Точность
Распознавания
52%
y
Рис. 4 – Существующий алгоритм
работы ДТ – простая нейросеть
Цель
Рис. 3 – СИМ в городской среде
опознан
Нейросеть детектора IDIM
Точность
Распознавания
95%
y
z
СИМ
Рис. 5 – Разрабатываемый алгоритм
работы ДТ – полносвязная нейросеть
3
4.
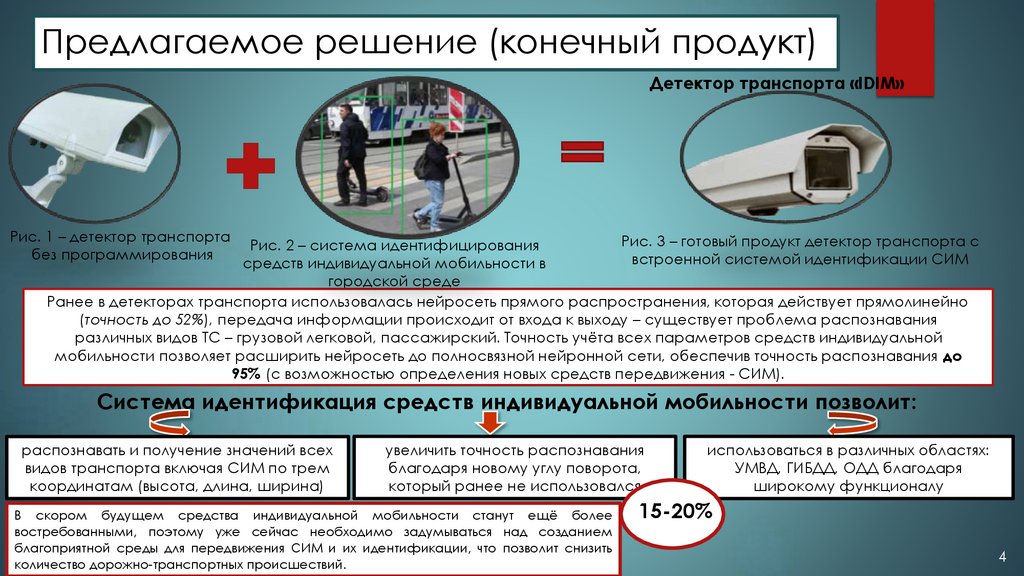
Предлагаемое решение (конечный продукт)Детектор транспорта «IDIM»
Рис. 1 – детектор транспорта
без программирования
Рис. 3 – готовый продукт детектор транспорта с
Рис. 2 – система идентифицирования
встроенной системой идентификации СИМ
средств индивидуальной мобильности в
городской среде
Ранее в детекторах транспорта использовалась нейросеть прямого распространения, которая действует прямолинейно
(точность до 52%), передача информации происходит от входа к выходу – существует проблема распознавания
различных видов ТС – грузовой легковой, пассажирский. Точность учёта всех параметров средств индивидуальной
мобильности позволяет расширить нейросеть до полносвязной нейронной сети, обеспечив точность распознавания до
95% (с возможностью определения новых средств передвижения - СИМ).
Система идентификация средств индивидуальной мобильности позволит:
распознавать и получение значений всех
видов транспорта включая СИМ по трем
координатам (высота, длина, ширина)
увеличить точность распознавания
благодаря новому углу поворота,
который ранее не использовался
В скором будущем средства индивидуальной мобильности станут ещё более
востребованными, поэтому уже сейчас необходимо задумываться над созданием
благоприятной среды для передвижения СИМ и их идентификации, что позволит снизить
количество дорожно-транспортных происшествий.
использоваться в различных областях:
УМВД, ГИБДД, ОДД благодаря
широкому функционалу
15-20%
4
5.
Техническая значимостьПри анализе потенциальных конкурентов было выполнено сравнение двух компаний,
продающих детекторы транспорта:
+
Стоимость
«ООО Автоматика-Д»
«ООО Рипас»
ДТ «IDIM»
Разнообразная специализация
сервисного оборудования и
детекторов транспорта.
Позволяет просчитывать
больше количество
транспортных средств с
минимальными временными
затратами
В одном устройстве будет
совмещаться получение
реальных значений количества
средств индивидуальных
мобильности и других
транспортных средств и
среднюю стоимость
производства
Отсутствует возможность
распознавания типов ТС
(грузовые, легковые,
пассажирские),
метеозависимость,
незначительный угол обзор.
При интеграции полученных
данный с устройства данной
фирмы существует
погрешность в 25-30 %,
поэтому данные показатели
являются недостоверными.
Метеозависимость при
температуре +45 °C
121 тыс.руб.
243 тыс.руб
Детектор транспорта «IDIM» по
состоянию на 15.03.2022
приблизительная стоимость
запрограммированного
устройства будет составлять
215 тыс. руб.
5
6.
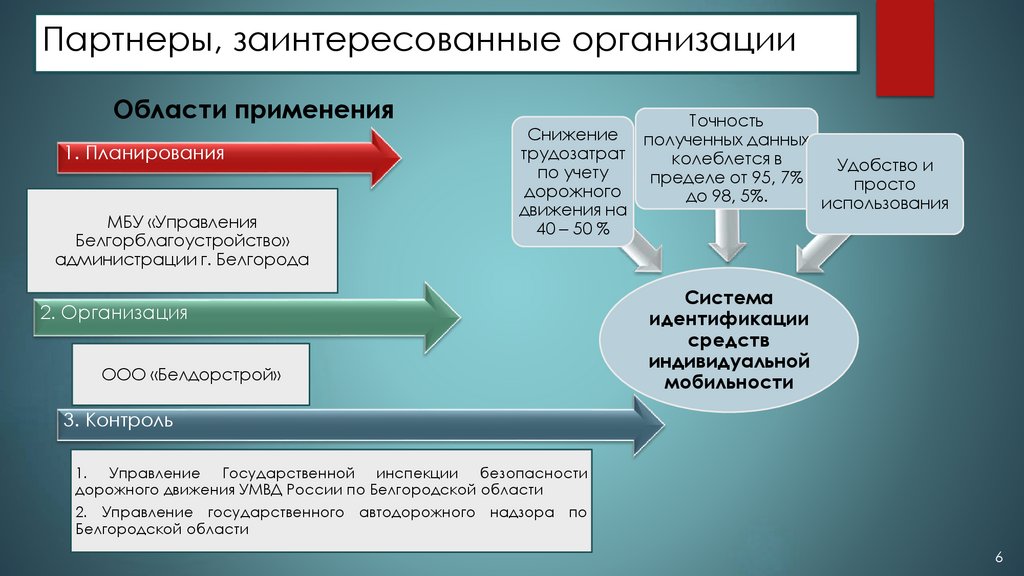
Партнеры, заинтересованные организацииОбласти применения
1. Планирования
МБУ «Управления
Белгорблагоустройство»
администрации г. Белгорода
Точность
Снижение полученных данных
трудозатрат
колеблется в
Удобство и
по учету
пределе от 95, 7%
просто
дорожного
до 98, 5%.
использования
движения на
40 – 50 %
2. Организация
ООО «Белдорстрой»
Система
идентификации
средств
индивидуальной
мобильности
3. Контроль
1. Управление Государственной инспекции безопасности
дорожного движения УМВД России по Белгородской области
2. Управление государственного автодорожного надзора по
Белгородской области
6
7.
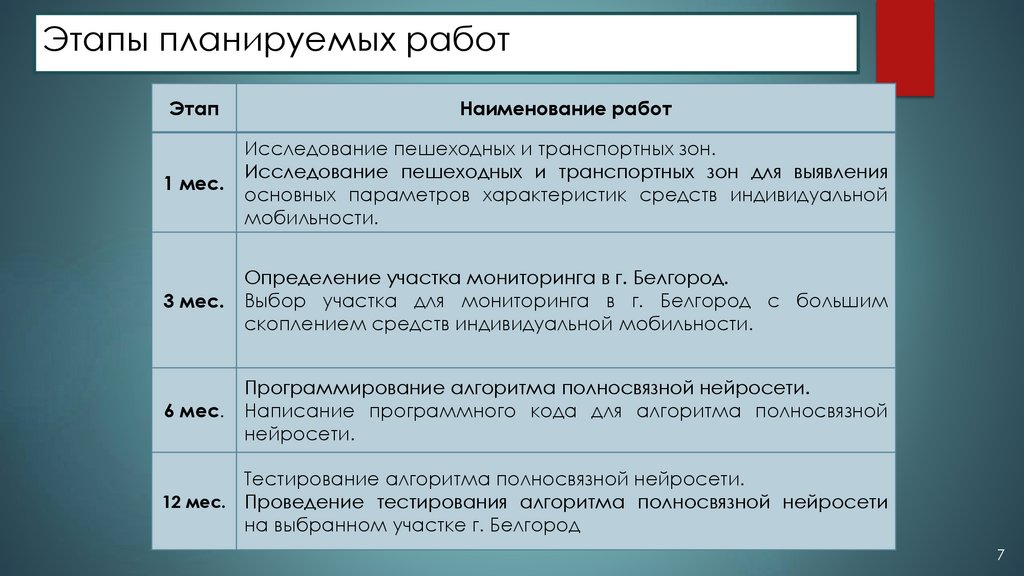
Этапы планируемых работЭтап
Наименование работ
1 мес.
Исследование пешеходных и транспортных зон.
Исследование пешеходных и транспортных зон для выявления
основных параметров характеристик средств индивидуальной
мобильности.
3 мес.
Определение участка мониторинга в г. Белгород.
Выбор участка для мониторинга в г. Белгород с большим
скоплением средств индивидуальной мобильности.
6 мес.
Программирование алгоритма полносвязной нейросети.
Написание программного кода для алгоритма полносвязной
нейросети.
Тестирование алгоритма полносвязной нейросети.
12 мес. Проведение тестирования алгоритма полносвязной нейросети
на выбранном участке г. Белгород
7
8.
Квалификация8
9.
Команда проектаВысоцкий Владимир Андреевич
Юнг Анастасия Алексеевна
Руководитель проекта - постановка цели,
координация работы команды, раскрытие
потенциала каждого участника команды.
Исполнитель проекта - претворяет
идеи исследователя в жизнь,
разработка планов, схем и
процедур.
Галюзин Александр Игоревич
Исследователь проекта - установление
новых контактов в компании, разработка
новых идей, ресурсов.
Магистрант Белгородского государственного Инспектор УМВД МРЭО ГИБДД по
Инженер первой категории МБУ
Белгородской области.
технологического университета им. В.Г. Шухова
Белгорблагоустройство отдел ЦУП
(центральный управленческий пункт)
9
10.
СПАСИБО ЗА ВНИМАНИЕ!ЮНГ АНАСТАСИЯ АЛЕКСЕЕВНА
студентка гр. МОБД-201
кафедры «Эксплуатация и организация движения
автотранспорта»
e-mail: yungnastena33@gmail.com
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ
ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО
ОБРАЗОВАНИЯ "БЕЛГОРОДСКИЙ ГОСУДАРСТВЕННЫЙ
ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ ИМ. В.Г. ШУХОВА"
10