




 Программное обеспечение
Программное обеспечение Промышленность
ПромышленностьПохожие презентации:









")
Система навигации группы автономных необитаемых подводных аппаратов в подводном пространстве без оператора и без проводов
1.
СИСТЕМА НАВИГАЦИИ ГРУППЫ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХАППАРАТОВ В ПОДВОДНОМ ПРОСТРАНСТВЕ БЕЗ ОПЕРАТОРА И БЕЗ ПРОВОДОВ.
Подготовили:
Анненков Владимир
Энс Эдуард
Ивженко Александр
Васильченко Дмитрий
Бухтияров Игорь
2.
Проблема:Цель:
В процессе обследования
подводной среды, часто
происходит ,что обследовать
большую площадь за короткое
время очень трудно, что приводит
к
Создать систему навигации
группы АНПА с целью
уменьшения времени
исследования площади, путём
сравнения аналогов и
заимствования сильных сторон
каждого аналога.
3.
ЗАДАЧИ ПРОЕКТА:Сравнить зарубежные и
отечественные аналоги
Выделить сильные
стороны каждого аналога
Создать собственную
систему навигации ,
применив сильные
стороны аналогов
Достичь стабильной
работы при глубине
свыше 2 км
Увеличить скорость
обследования
морской среды, за
счёт нашей системы
4.
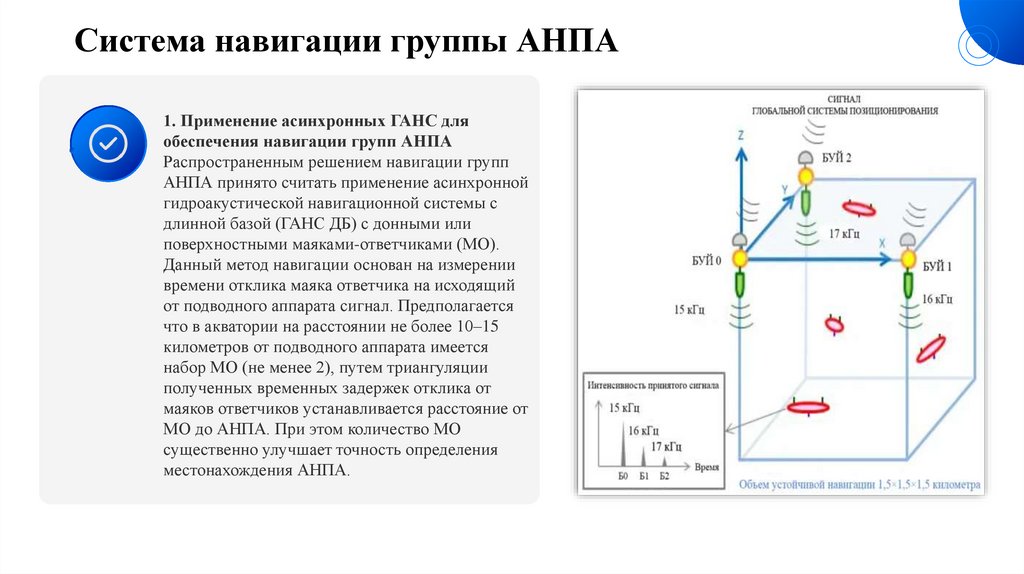
Система навигации группы АНПА1. Применение асинхронных ГАНС для
обеспечения навигации групп АНПА
Распространенным решением навигации групп
АНПА принято считать применение асинхронной
гидроакустической навигационной системы с
длинной базой (ГАНС ДБ) с донными или
поверхностными маяками-ответчиками (МО).
Данный метод навигации основан на измерении
времени отклика маяка ответчика на исходящий
от подводного аппарата сигнал. Предполагается
что в акватории на расстоянии не более 10–15
километров от подводного аппарата имеется
набор МО (не менее 2), путем триангуляции
полученных временных задержек отклика от
маяков ответчиков устанавливается расстояние от
МО до АНПА. При этом количество МО
существенно улучшает точность определения
местонахождения АНПА.
5.
Аналоги предложенного решения/продуктаОтечественные аналоги
Отечественные аналоги
Военный автономный необитаемый аппарат «Посейдон
Система
навигации
RedWAVE
Автономный необитаемый подводный планер «Морская
тень»
Автономный необитаемый подводный аппарат
МТ-2012 «Галтель»
EvoLogics Комбинированная
гидроакустическая система
позиционирования
Подводная акустическая
система ZIMA
Преимущества
Отечественные аналоги
Принцип работы системы RedWave схож с принципом работы глобальных
спутниковых навигационных систем GPS и GLONASS. С основным отличием
состоящим в том, что в роли навигационных спутников выступают небольшие
легкоустанавливаемые плавучие буи RedBASE — ретрансляторы спутникового
навигационного сигнала. При этом координата вырабатывается непосредственно
на навигационном приемнике RedNODE, который является акустически
пассивным устройством. Такая организация системы позволяет одновременно
обеспечить навигационными данными неограниченное число навигационных
приемников при поддержке одного комплекта буев в одной акватории.
Комбинированная гидроакустическая система позиционирования и
цифровой связи EvoLogics серии S2C предназначена для
позиционирования подводных объектов, получения их абсолютных и
относительных координат, а также двустороннего обмена
информацией с подводным объектом.
Подводная акустическая навигационная система Zima предназначена для
определения в реальном времени горизонтального угла и дистанции до
подводных объектов, оснащенных гидроакустическими маякамиответчиками. Отличительной особенностью данной системы является так
называемая двусторонняя навигация, запатентованное решение, которое
позволяет взаимно определять дистанцию как на базовой станции, так и на
маяке, а также передавать на маяк азимутальный угол базовой станции.
6.
Аналоги предложенного решения/продуктаПреимущества
Зарубежные аналоги
Зарубежные аналоги
Отечественные аналоги
Военный автономный необитаемый аппарат «Посейдон
Австралийская система навигации
Автономный необитаемый подводный планер «Морская
CERTUS
тень»
Автономный необитаемый подводный аппарат
МТ-2012 «Галтель»
Австралийская система навигации
Spatial FOG Dual
Английская система GIB SAR
CERTUS - это инерциальная навигационная система (ИНС) с
поддержкой GNSS, обеспечивающая точное положение,
скорость, ускорение и ориентацию. Она предлагает надежные
данные и 8 мм RTK точность положения. Низкий Swap-C
(размер, вес, мощность и стоимость) и несколько интерфейсов
связи позволяют легко интегрировать.
Spatial FOG Dual - это прочная инерциальная навигационная
система GPS и AHRS, которая обеспечивает точное определение
местоположения, скорости, ускорения и ориентации в самых
сложных условиях. Она сочетает в себе сверхточные
оптоволоконные гироскопы, акселерометры, магнитометры и
датчик давления с двойной антенной RTK GNSS приемника. Они
объединены сложным алгоритмом синтеза для обеспечения
точной и надежной навигации и ориентации.
Система выдаёт в реальном масштабе времени абсолютные координаты,
скорость и траекторию движения, подводных лодок, водолазов,
телеуправляемых подводных аппаратов, буксируемых подводных аппаратов,
автономных обитаемых и необитаемых подводных аппаратов. Также система
позволяет определять с большой точностью (до 1-5 метров) координаты
«черных ящиков» самолетов, оборудованных гидроакустическими маяками.
7.
Матрица заинтересованных лицВлияние
Поддерживать
удовлетворённость
Активно управлять
«Малахит»
«Гидроприбор»
«GNOM ROV»
Наблюдать
Поддерживать
информированность
Интерес
8.
Требования к продукты к решениюЗаинтересованное лицо
Требования
«Малахит»
Система навигации для группа АНПА для создания
системы территориальной безопасности в зоне
Северного Ледовитого океана
«Гидроприбор»
Испытание нашей системы навигации на их
аппаратах, если система их устроит, то компания
заключит с нами контракт на серийное
производство
«GNOM ROV»
Нужна система навигации группы беспилотных
Использовать группу автономныхподводных
необитаемых
аппаратов для обслуживания и починки
подводных аппаратов для поискаморских
повреждённых
судов
участков газопровода на дне моря
Так как компания создаёт уникальные подводные
аппараты им нужна уникальная система навигации
9.
План коммуникацийЗаинтересованное
лицо
Smelcom Robotics
«Гидроприбор»
«GNOM ROV»
«Малахит»
Формат
коммуникации
Конференции, встречи с
руководителями проекта,
онлайн конференции в
zoom.
Конференции, встречи с
руководителями проекта,
онлайн конференции в
discord.
Еженедельные отчёты о
продвижении проекта
Встречи и конференции
Периодичность
Актуальная(раз в
неделю)
Актуальная(по мере
возникновения вопросов)
Раз в неделю
Раз в несколько недель
10.
Управление рисками проектаРиск
Увеличение требуемого бюджета из-за
появившихся в процессе разработки технических
проблем
Дефицит запчастей из-за санкций
Технические риски, такие как отказы
электроники, проблемы с батареями, сбои в
программном обеспечении .
Банкротство заинтересованных лиц
Риски, связанные с недостаточной
квалификацией или опытом сотрудников,
Риски, связанные с недостаточной оценкой
затрат на разработку и производство устройства.
Вероятность
наступления
(0-1)
0,5
0,7
0,2
0,1
0,7
0,2
Степень
влияния
(1-10)
Значимость
Мероприятия по управлению риском
95%
Включение таких возможностей в договор с
заинтересованными лицами.
90%
Закупка запчастей у отечественного
производителя
70%
Предварительное тестирование системы
90%
Заранее прописать в договоре наши обязательства
перед заказчиком при подобном повороте событий.
90%
Организовать курсы повышения квалификации
для сотрудников.
60%
Изначально планировать бюджет с учетом
самых неблагоприятных исходов в процессе
разработки и производства.
11.
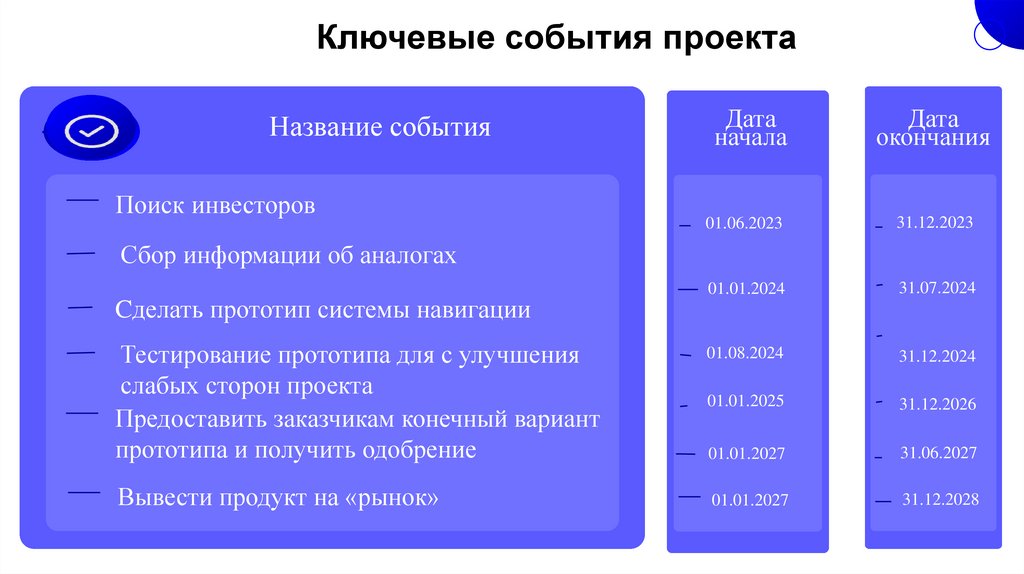
Ключевые события проектаНазвание события
Поиск инвесторов
Дата
начала
Дата
окончания
01.06.2023
31.12.2023
01.01.2024
31.07.2024
01.08.2024
31.12.2024
01.01.2025
31.12.2026
01.01.2027
31.06.2027
01.01.2027
31.12.2028
Сбор информации об аналогах
Cделать прототип системы навигации
Тестирование прототипа для с улучшения
слабых сторон проекта
Предоставить заказчикам конечный вариант
прототипа и получить одобрение
Вывести продукт на «рынок»
12.
Показатели эффективности проекта1.Площадь исследуемая за один час, увеличилась на 0.2км2. При сравнение результатов 2024 года с
результатами 2025 года.
2. Увеличено разрешение камеры аппарата в 2 раза. В период с 2025 года по 2026.
3. В 2026 году дальность автономного движения увеличена на 1,5 км по сравнению с 2025
4. В 2027 г. скорость классификации подводных объектов уменьшена на 0,5 секунды в сравнении с 2026.
5. В 2028 году длительность работы увеличена на 2 часа в сравнении с 2026 г.
13.
Бюджет проектаНаименование затрат
Количество
единиц/ объем
Стоимость за
единицу, руб.
Общая стоимость, руб
Курсы повышения квалификации
Зависит от штата
сотрудников
15000
Около 150000
Зарплата сотрудникам
Зависит от штата
сотрудников
50000-70000
Около 500000 руб. в месяц
АНПА для теста системы навигации
3
1500000
4500000
Закупка и обслуживание оборудования
10
70000
700000
Гидроакустические антенны
10
50000
500000
Буи для системы навигации
20
60000
1200000
Всего
7550000