













 Программирование
Программирование Электроника
ЭлектроникаПохожие презентации:










Школа робототехники и инженерии. Робот-доставщик на Arduino. Занятие 3
1.
Школаробототехники и
инженерии
Робот-доставщик на Arduino. Занятие 3
2.
ПРИВЕТ, РЕБЯТА!Правила занятий:
Соблюдаем тишину, когда говорит
преподаватель
Задаем вопросы, если что-то не понятно,
не стесняемся)
Не обмениваемся деталями. Просим
недостающие у преподавателя
Соблюдаем технику безопасности!
3.
Что мы узнали в прошлый раз?• Какие порты бывают?
• Отличие void loop от void setup?
• Как обозначается задержка в
программе?
4.
Функции Serial5.
Функция millis вместо delayunsigned long timing; // Переменная для хранения точки
отсчета
void setup() {
Serial.begin(9600);
}
void loop() { /* В этом месте начинается выполнение
аналога delay()
Вычисляем разницу между текущим моментом и ранее
сохраненной точкой отсчета.
Если разница больше нужного значения, то выполняем код.
Если нет - ничего не делаем */
if (millis() - timing > 10000){ // Вместо 10000
подставьте нужное вам значение паузы
timing = millis();
Serial.println ("10 seconds");
}
}
6.
Драйвер двигателя7.
Макетная плата8.
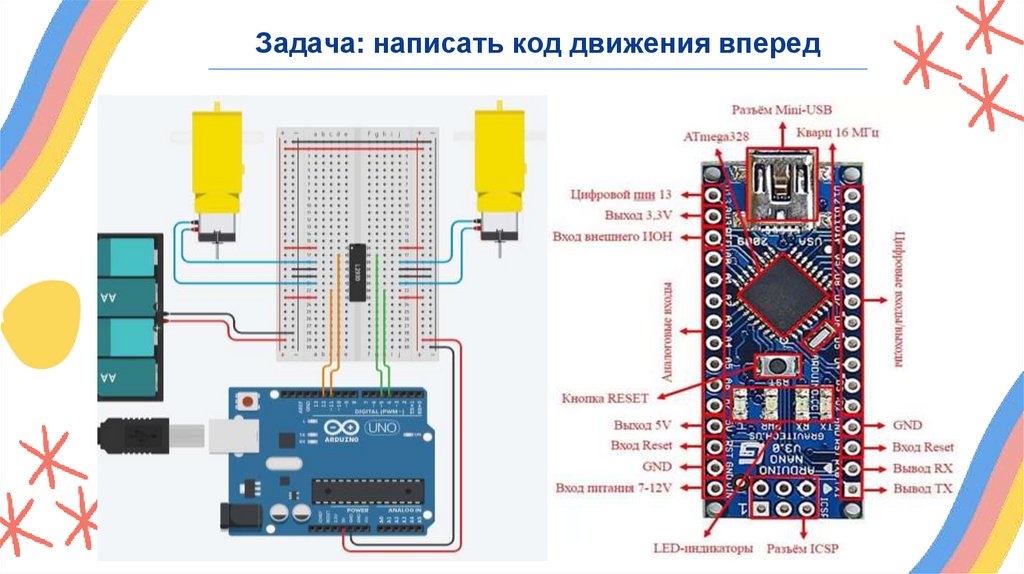
Подключение двигателя L293D к микроконтроллеру Arduino9.
Задача: написать код движения вперед10.
ТЕХНИКАБЕЗОПАСТНОСТИ:
Компьютер включает и выключает только
преподаватель
Нужные приложения открывает
преподаватель вначале занятия
Подключение Arduino по проводу с
разрешения преподавателя
Кушать и пить за компьютером запрещено:)
11.
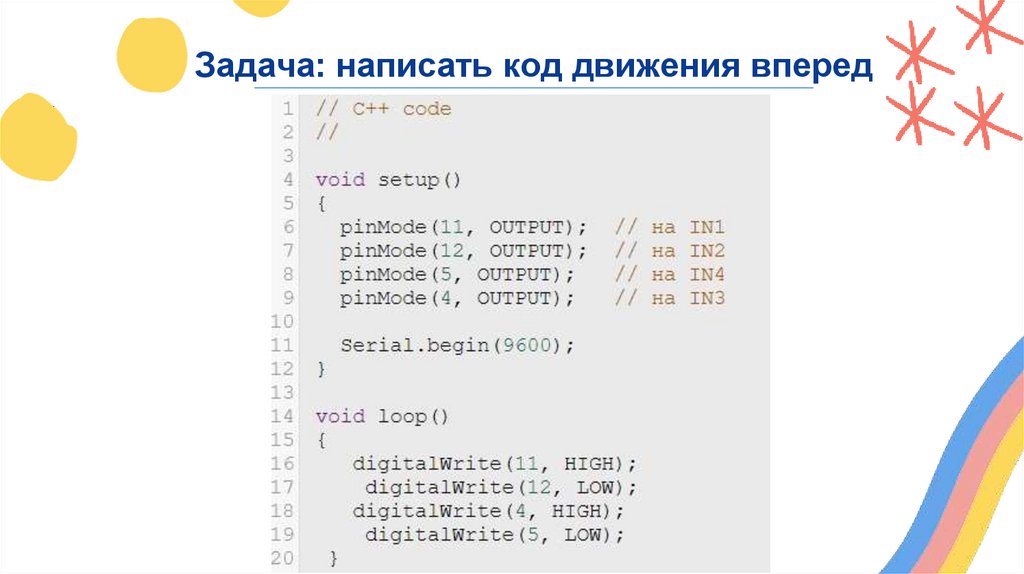
Задача: написать код движения вперед12.
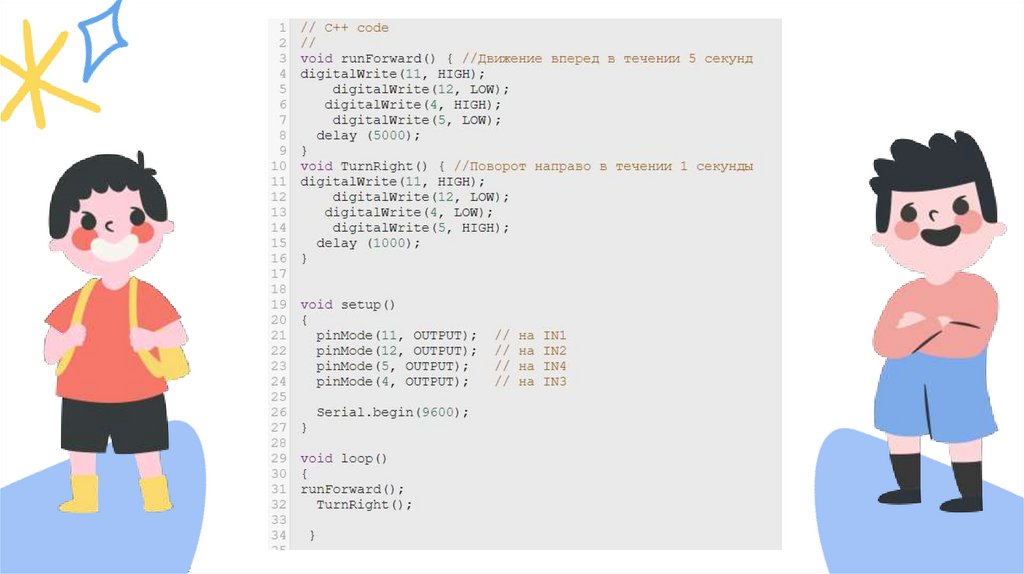
Задача: Необходимо запрограммироватьробота так, чтобы он проехал по квадрату
13.
Код программы14.
Функции в Arduino15.
Функции в ArduinoФункция, которая ничего не
принимает и ничего не возвращает
Функция, которая ничего не
принимает и возвращает результат
16.
Функция, которая принимает аргументы и возвращаетрезультат
17.
Задание: создать функции движения иповорота робота