










 Механика
МеханикаПохожие презентации:










Поворотные пневматические двигатели
1.
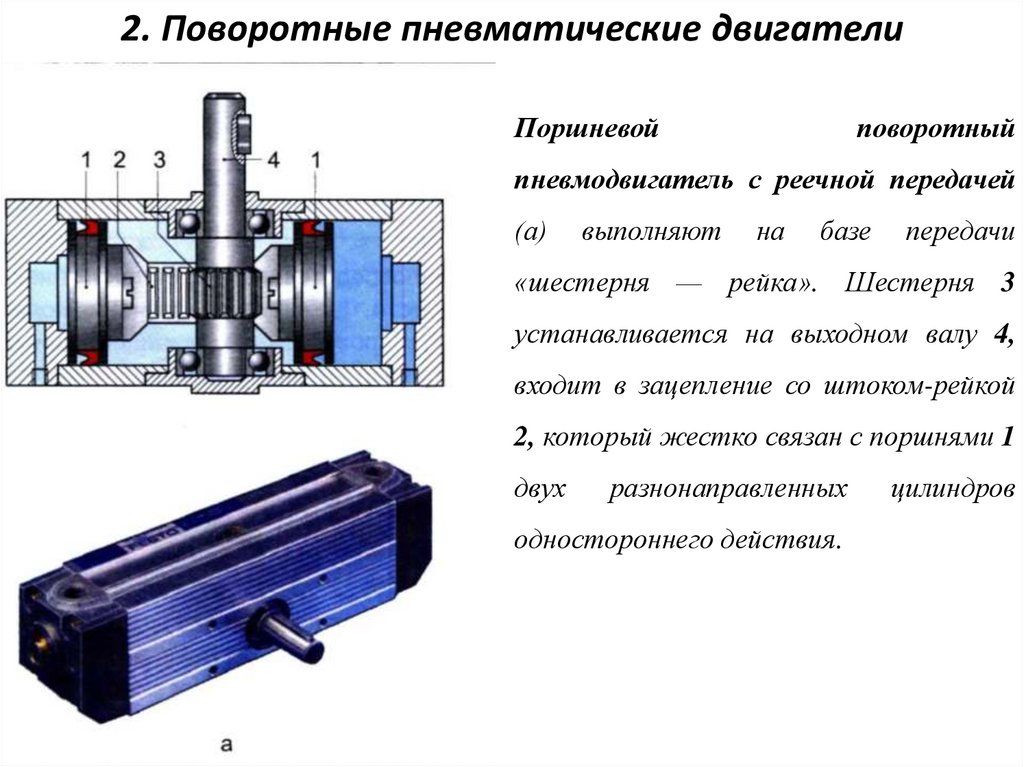
2. Поворотные пневматические двигателиПоршневой
поворотный
пневмодвигатель с реечной передачей
(а)
выполняют
на
базе
передачи
«шестерня — рейка». Шестерня 3
устанавливается на выходном валу 4,
входит в зацепление со штоком-рейкой
2, который жестко связан с поршнями 1
двух
разнонаправленных
одностороннего действия.
цилиндров
2.
Шиберныйповоротный
пневмодвигатель
(б)
устроен
таким
образом, что сжатый воздух воздействует
на шибер 1 — жестко закрепленную на
выходном валу 2 пластину, расположенную
внутри цилиндрической расточки 3 в корпусе
4.
Чтобы
предотвратить
перетекание
воздуха из одной рабочей полости двигателя
в другую пластину выполняют с резиновым
либо
пластмассовым
поворота
шибера
покрытием.
зависит
от
Угол
размеров
корпусного ограничителя 5 и в стандартных
конструкциях составляет 90, 180 или 270
градусов. Для установки произвольного угла
поворота
шиберные
пневмодвигатели
снабжают внешними передвижными упорами.
3.
Условное графическое обозначение поворотных пневмодвигателей: а —общее; б — с демпфированием в конце хода
4.
3. Пневмодвигатели вращательного действия —пневмомоторы
Пневмомоторы, предназначены для преобразования потенциальной
энергии сжатого воздуха в механическую работу и обеспечивают неограниченное
вращательное движение выходного вала.
Преимущества:
простота регулирования скорости вращения и крутящего момента;
возможность полного торможения под нагрузкой без ущерба для конструкции и
рабочих качеств пневмомотора;
отсутствие перегрева;
большой ресурс работы;
полная взрывобезопасность;
нечувствительность к неблагоприятным факторам внешней среды (пыль, влага
и др.);
простота монтажа.
5.
Классификация пневмомоторов6.
Шиберные пневмомоторы7.
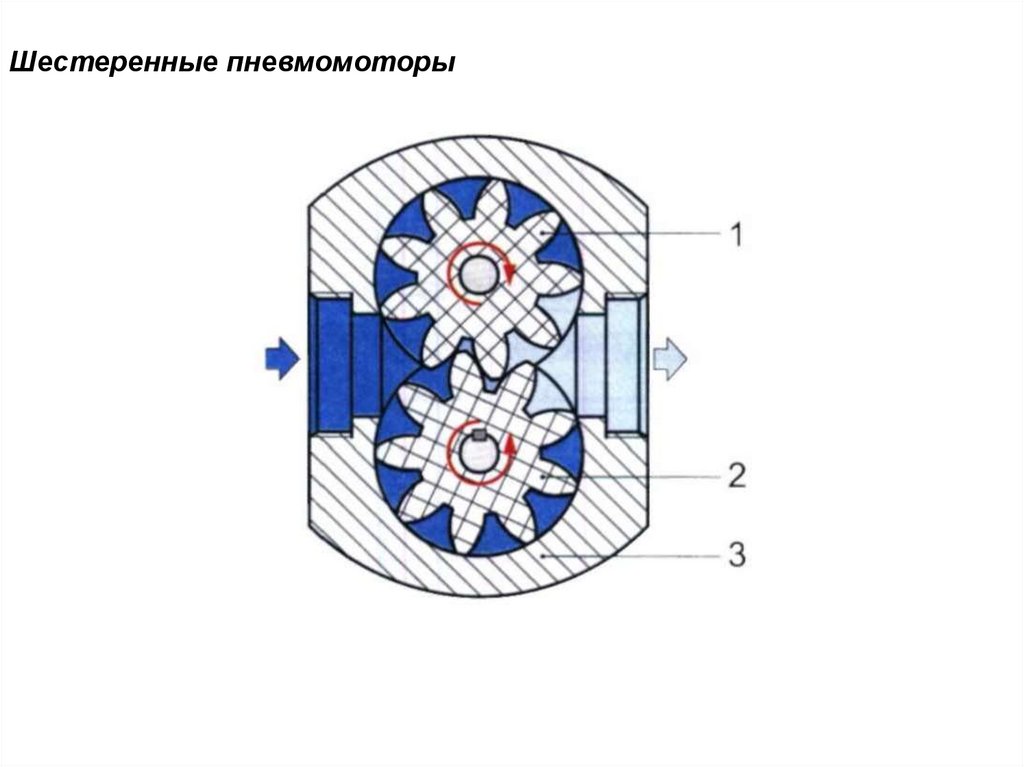
Шестеренные пневмомоторы8.
Радиально-поршневые пневмомоторыСжатый
воздух
одновременно
подается в две рабочие камеры
пневмомотора, например 1 и 2, через
крановый
распределитель
5,
установленный на выходном валу. При
этом
соответствующие
поршни,
перемещаясь к нижней «мертвой
точке», передают усилие на коленчатый
вал через свои шатуны. После поворота
вала, а •месте с ним и распределителя
на некоторый угол сжатый воздух
подается в рабочие камеры 2 и 3, а
отработавший воздух из камер 4 и 1
сбрасывается в атмосферу также через
крановый распределитель. Далее этот
цикл повторяется.
Радиально-поршневые пневмомоторы
применяют в больших подъемниках, в
приводах различных транспортных
средств.
9.
Пневмомоторы, вне зависимости от их конструктивного типа, обозначают напринципиальных пневматических схемах таким образом
10.
4.Специальные пневматическиеисполнительные устройства
Цанговые зажимы
Цанговый зажим состоит из следующих
основных деталей: цанги 1, обжимной втулки
2, кольцевого поршне 3 с пружинным
возвратом, шариков 4 и корпуса 5.
При подаче сжатого воздуха в зажим
поршень 3, сжимая возвратную пружину,
перемещается влево и вдавливает шарики 4 в
клиновой зазор между корпусом 5 и обжимной
втулкой 2, которая, в свою очередь, смещается вправо, сжимая лепестки цанги 1 и
осуществляя зажатие детали.
Для разжатия заготовки сжатый воздух из
поршневой полости сбрасывают в атмосферу,
при этом поршень возвращается в исходное
положение,
освобождая
шарики.
В
результате цанга разжимается, смещая
обжимную втулку в исходную позицию.
11.
Пневматические захватыПрактически любой робот-манипулятор снабжен захватным устройством,
предназначенным для того, чтобы захватить какой-либо объект, удерживать его при
перемещении и ориентации в пространстве, после чего отпустить в нужной точке
Рис. Пневматический захват с параллельным движением пальцев
При подаче сжатого воздуха в поршневую полость пневмоцилиндра двустороннего
действия шток выдвигается и через кулисный механизм разводит захватывающие пальцы
(а). При обратном ходе поршня пальцы сводятся (б).
12.
По конструктивному исполнению захваты подразделяются на:параллельные (а),
поворотные (б)
трехточечные (в).
13.
Вакуумные захватыВ вакуумных захватах объект удерживается вследствие разрежения, создаваемого в
полости между эластичным захватом (присоской) и поверхностью самого объекта (а),
при этом для получения вакуума в захвате важно, чтобы последняя была достаточно
гладкой и плотной.
14.
После лабораторной работы ожидаетсяTECT