









 Промышленность
ПромышленностьПохожие презентации:




 în Tranșee")
Mașini electrice de curent alternativ
1.
3. Mașini electrice de curent alternativ.3.1 Mașina asincronă
3.1.1 Elemente generale ale mașinilor asincrone.
1. Generalități și utilizări.
2. Părți componente.
3. Principiul de funcționare.
4. Regimuri de funcționare.
5. Cuplul electromagnetic și caracteristici
de funcționare.
2.
GeneralitățiMașina asincronă este o mașină electrică rotativă de curent alternativ care, la
frecvența dată a rețelei = 50 Hz, funcționează cu o turație variabilă cu sarcina.
Denumirea de asincronă provine de la faptul că viteza rotorului diferă de viteza
câmpului magnetic inductor creat de stator: Primele propuneri de mașini asincrone
au fost la sfârșitul secolului al XlX -lea. Una dintre acestea este cunoscută dinainte
de 1885 și aparține lui Galileo Ferraris, care a construit
un motor asincron. În anul 1886, Nicola Tesla a
conceput o mașină cu înfășurare difazată în stator;
la această mașină, rotorul este format dintr-un miez
feromagnetic care este echipat cu o înfășurare
scurtcircuitată.
Motorul asincron cu rotorul bobinat a fost conceput
în anul 1889 de Dolivo- Dobrovolski. Tot DolivoDobrovolski a proiectat și realizat motorul asincron
cu colivie dublă în rotor.
3.
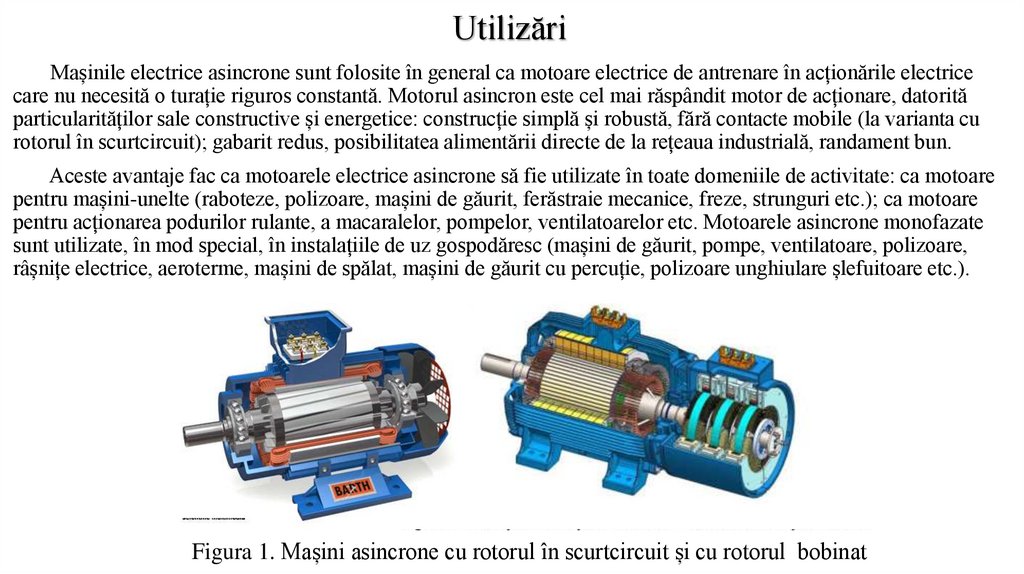
UtilizăriMașinile electrice asincrone sunt folosite în general ca motoare electrice de antrenare în acționările electrice
care nu necesită o turație riguros constantă. Motorul asincron este cel mai răspândit motor de acționare, datorită
particularităților sale constructive și energetice: construcție simplă și robustă, fără contacte mobile (la varianta cu
rotorul în scurtcircuit); gabarit redus, posibilitatea alimentării directe de la rețeaua industrială, randament bun.
Aceste avantaje fac ca motoarele electrice asincrone să fie utilizate în toate domeniile de activitate: ca motoare
pentru mașini-unelte (raboteze, polizoare, mașini de găurit, ferăstraie mecanice, freze, strunguri etc.); ca motoare
pentru acționarea podurilor rulante, a macaralelor, pompelor, ventilatoarelor etc. Motoarele asincrone monofazate
sunt utilizate, în mod special, în instalațiile de uz gospodăresc (mașini de găurit, pompe, ventilatoare, polizoare,
râșnițe electrice, aeroterme, mașini de spălat, mașini de găurit cu percuție, polizoare unghiulare șlefuitoare etc.).
Figura 1. Mașini asincrone cu rotorul în scurtcircuit și cu rotorul bobinat
4.
Motoarele asincrone trifazate cu rotorul în scurtcircuit sunt simbolizate prin grupul de litereASI. De exemplu, simbolul ASI 250M-4 înseamnă:
ASI - motor asincron trifazat cu rotorul în scurtcircuit, în construcție închisă;
250M - gabaritul 250, mediu, ceea ce înseamnă că înălțimea axului mașinii este de 250
mm de la planul tălpilor de fixare, iar motorul este executat în lungime medie;
4 - numărul de poli ai motorului, care indică viteza de sincronism, respectiv 1500 rot/min,
în cazul exemplificat.
Motoarele asincrone cu rotorul bobinat se folosesc la diverse acționări unde este necesară
pornirea în plină sarcină, sau - în orice caz - cu un cuplu de pornire ridicat, la curenți de
pornire limitați, ca de exemplu: compresoare de debit mare, pompe cu contrapresiune, mașini
de trefilat etc.
Pentru o serie de acționări care necesită porniri în plină sarcină (mașini unelte, pompe fără
contrapresiune, ventilatoare), se utilizează motoare asincrone cu rotorul în scurtcircuit, cu
două turații.
Motoarele asincrone trifazate cu rotorul în scurtcircuit, în construcție antiexplozivă
antideflagrantă sunt destinate acționărilor instalațiilor ce lucrează în medii cu pericol de
explozie în industria chimică, petrolieră și minieră.
5.
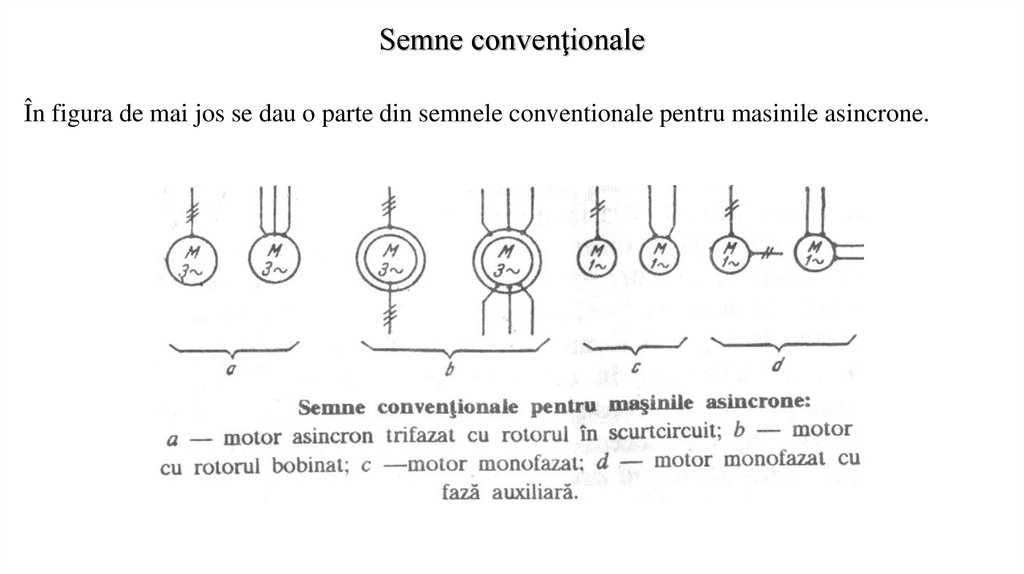
Semne convenţionaleÎn figura de mai jos se dau o parte din semnele conventionale pentru masinile asincrone.
6.
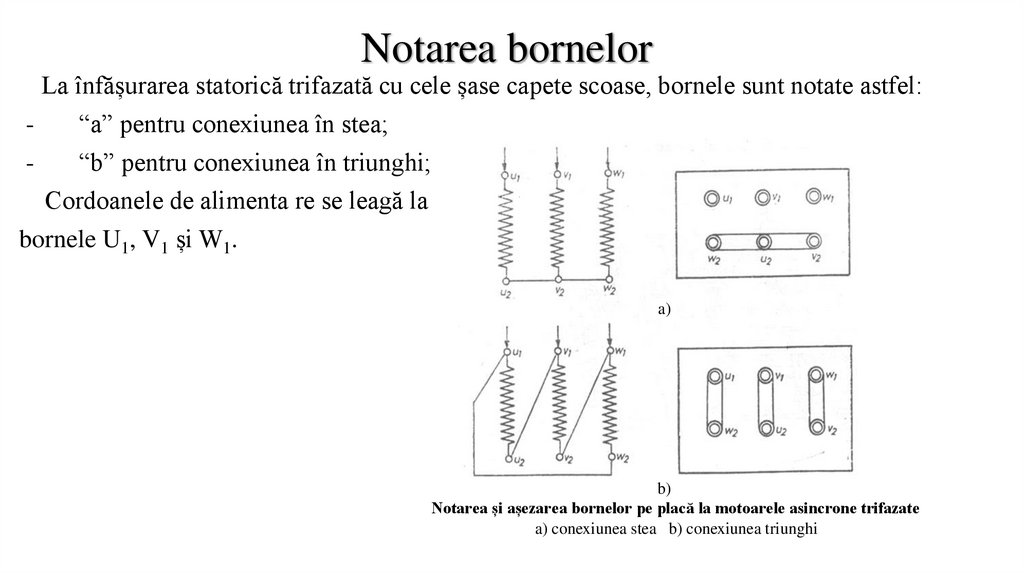
Notarea bornelorLa înfășurarea statorică trifazată cu cele șase capete scoase, bornele sunt notate astfel:
“a” pentru conexiunea în stea;
“b” pentru conexiunea în triunghi;
Cordoanele de alimenta re se leagă la
bornele U1, V1 și W1.
a)
b)
Notarea și așezarea bornelor pe placă la motoarele asincrone trifazate
a) conexiunea stea b) conexiunea triunghi
7.
Părți componente8.
Rotorul (indusul) este partea mobilă a mașinii, alcătuită din:• circuit magnetic (miez feromagnetic);
• sistem de înfășurări;
• organ colector.
Indusul mașinii - rotorul poartă spirele în care ia naștere t.e.m. de inducție. El este format dintr-un miez fixat pe
arborele mașinii. La periferia indusului se află crestăturile, în interiorul cărora se introduc conductoarele bobinajului.
Arborele (din oțel) este componente pe care se fixează rotorul.
Organul colector este necesar pentru realizarea legăturilor electrice între înfășurarea rotorică - mobilă în spațiu, odată
cu rotorul - și circuitul electric exterior, de la care primește energia electrică. Această legătură se asigură sub forma unui
contact alunecător, alcătuit din:
partea mobilă - inele colectoare ;
- lamele colectoare;
o partea fixă - perii colectoare.
O înfășurare este alcătuită din spire (bucle simple formate de un conductor sau de mai multe conductoare legate în
paralel) și bobine (formate din mai multe spire).
Înfășurarea rotorică trifazată (ca și cea statorică) se realizează din cupru izolat cu email, bumbac, fibră de sticlă etc.
Alături de părțile componente de bază, mașinilor electrice le mai sunt necesare, pentru funcționare, și o serie de piese și
subansambluri, dintre care:
• ventilatorul;
• lagărele, scuturile;
• colierul cu portperii;
• inelul de ridicat;
• cutia de borne;
• capacul protector .
9.
Principiul de funcționare, regimuri de funcționare.În crestăturile statorice sunt amplasate trei înfășurări repartizate identice. Aceste înfășurări sunt decalate, între ele, cu 120°
geometrice. Prin bobine vor circula curenții i1, i2 și i3. Acești curenți formează un sistem trifazat simetric (curenți egali). Trecerea
curentului prin bobine, conform legii inducției electromagnetice, determină apariția unui câmp magnetic alternativ cu repartiție
sinusoidală. În consecință, înfășurarea statorică parcursă de curentul alternativ trifazat dă naștere unui câmp magnetic învârtitor
care se rotește în sensul succesiunii fazelor cu turația de sincronism n1:
60∗f
n1 =
[rot/min]
p
unde: n1 – turația câmpului magnetic învârtitor statoric (turație sincronă);
f – frecvența curenților din stator (50 Hz);
p – numărul de perechi de poli.
Dacă rotorul este în repaus, acest câmp va induce în fazele
înfășurării rotorice, conform legii inducției electromagnetice,
tensiuni electromotoare.
În cazul în care înfășurarea rotorică este scurtcircuitată sau
se racordează pe o impedanță trifazată simetrică, aceste tensiuni
electromotoare (induse) alcătuiesc un sistem simetric și
echilibrat iar curenții induși, asemenea celor din înfășurările
statorice, determină apariția unui câmp magnetic învârtitor.
Prin interacțiunea câmpului magnetic statoric cu acești
curenți induși vor lua naștere forțe electromagnetice care se vor
exercita asupra fiecărui conductor rotoric.
10.
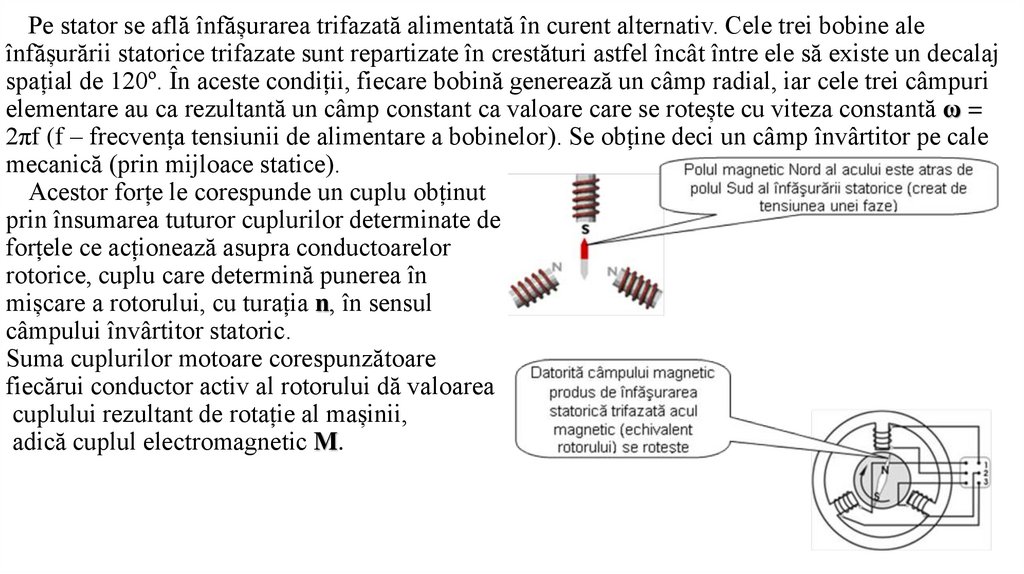
Pe stator se află înfășurarea trifazată alimentată în curent alternativ. Cele trei bobine aleînfășurării statorice trifazate sunt repartizate în crestături astfel încât între ele să existe un decalaj
spațial de 120º. În aceste condiții, fiecare bobină generează un câmp radial, iar cele trei câmpuri
elementare au ca rezultantă un câmp constant ca valoare care se rotește cu viteza constantă ω =
2πf (f – frecvența tensiunii de alimentare a bobinelor). Se obține deci un câmp învârtitor pe cale
mecanică (prin mijloace statice).
Acestor forțe le corespunde un cuplu obținut
prin însumarea tuturor cuplurilor determinate de
forțele ce acționează asupra conductoarelor
rotorice, cuplu care determină punerea în
mișcare a rotorului, cu turația n, în sensul
câmpului învârtitor statoric.
Suma cuplurilor motoare corespunzătoare
fiecărui conductor activ al rotorului dă valoarea
cuplului rezultant de rotație al mașinii,
adică cuplul electromagnetic M.
11.
Când rotorul se mișcă, în înfășurarea rotorică se induc curenți de frecvență f2=p(n1-n), curenți care produc un câmp învârtitorf
de turație n2: n2 = 2
p
Unda învârtitoare a câmpului magnetic rotoric este sincronă cu cea statorică deoarece rotorul se rotește cu turația n, și față de
stator are turația n2 + n = n1.
Dacă rotorul se va roti din exterior cu turația n = n1, în înfășurarea rotorică nu se vor mai induce curenți (pentru că această
înfășurare nu se află în mișcare relativă față câmpul inductor), în mașină nu va mai apărea cuplu electromagnetic.
Dacă rotorul va fi lăsat liber, datorită forțelor de frecare și a cuplului rezistent de la ax, turația rotorului va descrește. Rotorul
„alunecă” față de câmpul statoric rămânând în urmă.
Alunecarea, mărimea caracteristică motoarelor asincrone, se definește astfel:
n1 −n
s=
n1
Astfel, frecvența curenților rotorici, poate fi
exprimată funcție de frecvența curenților din stator:
f 2 pn2 pn1
n1 n
n1
f1 s
12.
În regim nominal de funcționare al motorului asincron, conform acestei relații, frecvențacurenților rotorici este mult mai mică decât frecvența curenților statorici deoarece alunecarea s
este cuprinsă între (3-10)%.
De aici rezultă că mașina asincronă modifică și frecvența energiei primite și, deci, o a doua
justificare a denumirii ce i s-a dat, de transformator generalizat.
Este cunoscut faptul că vitezele unghiulare sunt proporționale cu vitezele de rotație, și ca
atare, expresia alunecării poate deveni:
1
s
1
1
unde:
și
1
- este viteza unghiulară a câmpului învârtitor
p
p
- viteza unghiulară a rotorului.
Observație: Turația n a fost împărțită la 60 pentru a se putea exprima în rot/min – unitate
uzuală pentru mașinile electrice rotative.
13.
Regimuri de funcționareÎn regim de motor mașina absoarbe putere electrică din rețea, pe la bornele înfășurării statorice, și furnizează, la arbore,
putere mecanică. Acesta este cel mai utilizat regim de funcționare a mașinii asincrone.
Turația rotorului, în acest caz, este mai mică decât turația de sincronism (n<n1).
pentru regimul de motor: n < n1 ⇒ 0 < s <1
Dacă însă mașina este antrenată, cu ajutorul unui motor auxiliar, în sensul de mișcare, cu o turație (n>n1), se schimbă sensul
de deplasare a rotorului față de câmpul inductor statoric. Prin urmare se va schimba și sensul tensiunii electromotoare induse,
respectiv al curentului indus, și, implicit, al cuplului.
În această situație mașina primește putere mecanică pe la arbore (de la motorul auxiliar) și cedează putere electrică pe la
bornele înfășurării statorice. Spunem că mașina funcționează în regim de generator.
pentru regimul de generator: n > n1 ⇒ s < 0
În cazul regimului de frână electromagnetică, mașina este antrenată,
din exterior, în sens contrar câmpului statoric (n<0).
Ea primește astfel putere mecanică pe la arbore, putere electrică pe la
bornele înfășurării statorice, întreaga putere rezultată, după acoperirea
pierderilor, fiind disipată pe înfășurări, determinând astfel
încălzirea acestora.
pentru regimul de frână: n < 0 ⇒ s > 1
14.
Încercarea mașinii asincrone1. Inspecţia înainte de pornire .
După terminarea instalarii motorului şi înainte de testare, se verifică exactitatea conexiunii motorului cu echipamentul
antrenat. Verificăm dacă firele sunt legate corect în conformitate cu diagrama de conexiuni. Pentru o funcționare a motorului în
condiții de siguranță este utilă o inspecție strictă şi atentă.
1.1 Verificăm dacă motorul este instalat corect, dacă fundația nu este defectă, de exemplu, dacă există vreo fisură sau nu.
1.2 Verificăm dacă șuruburile de fixare sunt filetate în partea de jos.
1.3 Verificăm dacă toate conexiunile sunt făcute corect, inclusiv conexiunile tuturor echipamentelor auxiliare.
1.4 Verificăm dacă diametrul conductoarelor este corect sau nu, dacă sunt pierderi în comun sau dacă există orice alt defect.
1.5 Verificăm dacă clasa de temperatură şi tensiunea precum și rezistența conductoarelor îndeplinesc cerinţele motorului
sau nu.
1.6 Verificăm dacă există izolație la capetele cablului cu excepţia sârmei de conexiune la borne.
1.7 Reconfirmati daca cutia de borne si carcasa motorului au fost impamantate.
1.8 Verificăm dacă capacitatea contactorului, a siguranţei, etc. în sistemul de control sunt corecte sau nu, și dacă contactele
din contactoare sunt în stare bună.
1.9 Indiferent de metoda de pornire stabilită dacă îndeplineşte cerinţa motorului.
1.10 Verificăm dacă sistemul de răcire este conectat corect sau nu.
1.11 Verificăm legarea conductei de lubrifiere din lagarul de alunecare și acordăm atenţie dacă există vreo scurgere în
timpul funcţionării.
1.12 Pentru motorul având racire cu apă, verificăm conexiunea conductei de apă pentru răcire, acordând atenţie faptului
dacă există vreo scurgere în timpul funcţionării.
1.13 Verificăm dacă presiunea şi debitul de ulei de ungere pentru lagărul de alunecare şi de apă pentru răcirea racitorului de
apă indeplinesc cerinţele sau nu.
1.14 Verificăm dacă conectarea cablurilor principalele este corectă şi bine facută.
1.15 Pentru motorul cu încălzitor, ar trebui să se asigure că nu este stimulat în timpul funcționării motorului, și stimulat
când motorul este oprit.
15.
2. Măsurarea rezistenţei de izolaţieÎnainte de prima pornire, sau la o repornire după ce motorul a fost in repaos pentru o lungă perioadă de timp, ar trebui măsurată
rezistenţa de izolaţie a motorului. Măsurătorile includ bobinajul statoric și rotoric (la motoarele cu inele colectoare). În general in
procesul de întreţinere a unui motor, rezistenţa de izolaţie trebuie să fie întotdeauna măsurată. Pentru un motor nou livrat bobinajul este
uscat iar rezistența sa de izolație este relativ mare. Dacă condiţiile de transport și depozitare nu sunt adecvate pentru motor, și motorul
este afectat de umezeală sau este folosit incorect, toate acestea vor cauza reducerea rezistenţei de izolaţie.
Valoarea rezistenţei de izolaţie oferă informaţii legate de umiditate si de curăţenie a materialului izolant. Starea corectă a izolației
motorului poate fi stabilită pe baza acestor informaţii.
2.1 Măsuri de precauţie înainte de măsurarea rezistenţei de izolaţie
(1) Dacă valoarea măsurată a rezistenţei de izolaţie este relativ mică, curățim bobinajul motorului. Dacă încă nu poate fi atins rezultatul
dorit, uscăm bobinajele.
(2) Dacă înainte de măsurare motorul este afectat de umiditate, indiferent de rezultatul măsurării motorul trebuie să fie uscat.
(3) Odată cu creşterea temperaturii bobinajului, rezistenţa de izolaţie a motorului va scădea. În general, când temperatura este mai mare
decat cea a mediului ambiant, şi temperatura creşte cu +10˚C, rezistența sa de izolaţie va scădea la jumătate din valoare.
(4) Când la livrarea motorului izolația bobinajului este foarte bună, înseamnă că valoarea masurată de producător a rezistenţei de izolaţie
a fost mult mai mare decât valoarea măsurată la locul de montaj.
2.2 Valoarea minimă admisă a rezistenţei de izolaţie.
În general, este nerealist să se judece foarte corect valoarea minimă admisă a rezistenţei de izolaţie, pentru
că valoarea rezistentei de izolație depinde de gradul de uscare a motorului, varietatea motorului şi conditiile
actuale la locul de montaj. Rezistența de izolație a unui motor uscat este mult mai mare decât valorile minime
admise.
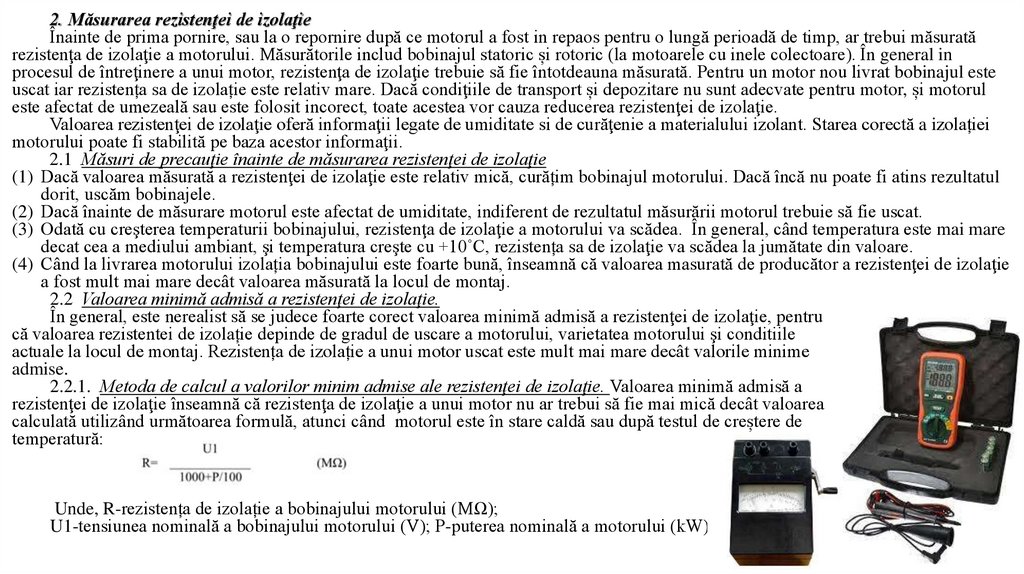
2.2.1. Metoda de calcul a valorilor minim admise ale rezistenţei de izolaţie. Valoarea minimă admisă a
rezistenţei de izolaţie înseamnă că rezistenţa de izolaţie a unui motor nu ar trebui să fie mai mică decât valoarea
calculată utilizând următoarea formulă, atunci când motorul este în stare caldă sau după testul de creștere de
temperatură:
Unde, R-rezistența de izolație a bobinajului motorului (MΩ);
U1-tensiunea nominală a bobinajului motorului (V); P-puterea nominală a motorului (kW).
16.
2.2.2.. Controlul valoarii rezistenţei de izolaţie in conditii generale. Valoarea calculată conform metodei de calcul a valoriiminime admise a rezistenței de izolație este valoarea de control a motorului în stare caldă. În general este imposibilă măsurarea
când motorul este în stare caldă, astfel încât valoarea de control s-ar putea schimba. La livrarea motorului, deoarece bobinajul
motorului este foarte uscat, rezistența sa de izolație este foarte mare. Este caracteristic ca la motoarele de joasă tensiune de obicei
să fie peste 500MΩ, iar la cele de înaltă tensiune peste 1000MΩ. Cu toate acestea, în cazul în care aceasta este măsurată într-un
mediu în care temperatura este foarte mare și umiditatea relativ mare, valoarea rezistenței de izolaţie va scădea în mod evident.
Dacă rezistenţa de izolaţie a unui motor de joasă tensiune este peste 10MΩ, iar a unui motor de înaltă tensiune este peste
100MΩ, motorul poate fi utilizat încă în condiții normale. Indiferent dacă există umiditate sau prea mult praf verificăm starea
motorului, dacă izolația este mai mică decât această valoare, deoarece chiar şi în cazul în care izolația nu este deteriorată, poate
să apară izolație scăzută.
În cazul unui motor folosit, acesta poate fi utilizat încă în condiții normale în cazul în care rezistenţa sa de izolaţie
referindu-se la un motor de joasă tensiune este de peste 10MΩ, şi respectiv peste 100MΩ la motoarele de inalta tensiune. Pentru
rezistenţa de izolaţie a unui rotor bobinat, motorul poate fi utilizat în cazul în care aceasta este peste 10MΩ. Reţineţi că praful de
carbune pe suprafața metalică a inelelor de alunecare poate reduce rezistenţa de izolaţie a rotorului.
2.2.3. Măsurarea rezistenţei de izolaţie a statorului unui motor. Măsurarea rezistenţei de izolaţie se face printr-o măsurare
a izolației metrice cu un instrument (numit în general megohmetru). Se vor folosi diferite capacități pentru măsurarea metrică a
izolatiei în conformitate cu diferite clase de tensiune.
(1) Când tensiunea nominală este de până la 1140V este utilizat megohmetru de 500V c.c. sau 1000V c.c.
(2) Cand tensiunea nominală este de 1140V și peste, pentru măsurare se foloseste un megohmetru de 2500V c.c.
Notă: când rezistența de izolație este în curs de măsurare sau după ce măsurarea este terminată, nu legăm la borna de
contact a motorului, legăm doar la pamânt pentru o perioadă de timp în scopul de a preveni șocul electric (electrocutarea).
Înainte de măsurarea rezistenţei de izolaţie, confirmăm întotdeauna faptul că sursa de alimentare este oprită iar motorul
este înca în asteptare.
Nu contează capacitatea megohmetrului care se foloseşte pentru măsurarea rezistenţei de izolaţie, timpul de măsurare
trebuind să fie de cel puţin 1 minut, după care înregistrăm rezultatul măsurării. Atenție la următoarele operaţiuni înainte de
măsurare:
17.
(1) Confirmăm că este taiată legătura de la toate sursele de alimentare.(2) Confirmăm ca alte bobinaje și carcasa motorului care nu vor fi măsurate sunt împamantate.
(3) Împămantăm cablurile tuturor dispozitivelor auxiliare.
(4) Rezistenţa de izolaţie trebuie să fie măsurată în cutie de borne a motorului iar megohmentrul trebuie să fie legat între bobinajul motorului
și carcasa.
(5) În ceea ce priveşte măsurarea rezistenţei de izolaţie, probabil ca ar putea fi măsurat întregul bobinaj. Dacă este necesar, rezistența de
izolație a fiecărei faze a bobinajului ar putea fi măsurată separat. Pentru a măsura rezistenţa de izolaţie a unui anumit bobinaj, bobinajele celorlalte
două faze trebuie să fie legate împreună şi puse la pamant.
(6) Măsurarea temperaturii bobinajului. Dacă motorul a fost depozitat pentru o perioadă de timp, în loc de temperatura bobinajului poate fi
masurată temperatura carcasei motorului.
(7) După terminarea măsurării rezistenţei de izolaţie, legăm la pământ bobinajul în conformitate cu prevederile testului, pentru descărcarea
imediată.
2.2.4. Măsurarea rezistenţei de izolaţie a unui motor cu rotor bobinat. Măsurarea rezistenţei de izolaţie pentru motoare cu rotor bobinat este
la fel ca pentru un motor obișnuit și, cu toate acestea, trebuie să se acorde atenţie la următoarele:
(1) Confirmăm că este taiată legătura de la toate sursele de alimentare.
(2) Confirmăm ca este taiată legătura de la sursa de alimentare la inelul de alunecare.
(3) Confirmăm că bobinajul rotoric, arborele şi carcasa sunt împământate.
(4) Verificăm dacă este corectă presiunea periei de carbune.
(5) Dacă se masoară rezistenţa de izolaţie a bobinajului rotorului, acordăm totodată atenție la măsurarea temperaturii bobinajului. Daca
motorul a fost depozitat pentru o perioadă de timp, în loc de temperatura bobinajului putem măsura temperatura carcasei.
1 Împământăm bobinajul statorului şi carcasa.
2 Legăm arborele la pamânt.
3 În general, bobinele pot fi legate în stea și măsurate împreună. În cazul în care acestea sunt masurate separat, bobinele care nu trebuie
măsurate vor fi legate alternativ la pamânt.
4 După terminarea măsurării rezistenţei de izolaţie, bobinajul aflat în testare trebuie să fie legat imediat la pământ pentru descărcare
imediată.
2.2.5. Măsurarea rezistenţei de izolaţie a componentelor auxiliare
(1) Pentru motoare cu încălzitor, rezistenţa de izolaţie a încălzitorului este măsurată cu megohmetru de 500V c.c.
(2) Pentru motoarele cu lagăre izolate. În cazul în care se montează la ambele capete lagăre izolate sau izolate separat, singurul lucru de
făcut este de a deconecta firul de legare la pământ pe capatul de arbore. Dacă lagărul izolat nu este montat pe capatul de arbore, măsurarea poate fi
efectuată numai după ce lagărul, carcasa lagărului şi capota sunt separate.
18.
Mașinile electrice noi sau reparate se supun unor încercări de control care au ca scop stabilirea concordanței parametrilor mașinii cuprevederile standardelor în vigoare, ca și determinarea acelor caracteristici și parametri, care, deși nu sunt normalizați, au valoare importantă
pentru exploatare.
Pentru exemplificarea modului de efectuare a principalelor încercări, în cele care urmează se vor descrie încercările ce se efectuează la
mașinile reparate.
Încercările mașinilor electrice se fac atât în timpul execuției sub formă de încercări intermediare, cât și asupra mașinilor montate sub forma de
încercări finale. O parte din încercările finale sunt comune tuturor mașinilor electrice, iar altele sunt specifice fiecărui tip de mașină. Probele ce se
efectuează la aceste încercări, precum și în ordinea lor sunt următoarele:
a. Verificarea exterioară și a stării generale a mașinii.
b. Măsurarea întrefierului dintre rotor și stator.
Măsurarea se face cu aparate speciale, în 4—8 puncte diametral opuse. Valorile obținute nu trebuie să difere față de media, egală cu semisuma
lor, cu mai mult de ±10%.
c. Măsurarea rezistenței de izolație a înfășurărilor
Se măsoară după cum urmează:
pentru motoare asincrone cu Unom > 1 kV sau Pnom > 50 kW, cu megohmmetrul de 2 500 V;
pentru motoare asincrone cu Unom < 1 kV, indiferent de putere și pentru motoarele de curent continuu, cu megohmmetrul de 1 000 V.
Rezultatele măsurărilor nu se normează. Valorile obținute nu trebuie însă să fie mai mici decât 70 % din datele de catalog. În lipsa lor se
recomandă formula:
d. Încercarea rigidității dielectrice a înfășurărilor sau proba cu tensiune mărita alternativă 50 Hz
Se aplică o tensiune sinusoidală cu f = 50 Hz, izolației înfășurării care sc încearcă, față de masă, la care s-au legat celelalte înfășurări ce nu se
supun probei. Valoarea inițială a tensiunii de încercare nu trebuie să depășească jumătate din tensiunea nominală de încercare, iar variația ei trebuie
făcută în trepte.
Timpul de încercare este de 1 min, iar timpul de creștere al tensiunii de încercare dc la 0,5 Vînc la valoarea prescrisă trebuie să fie dc
minimum 10 s.
Reducerea tensiunii se face treptat. Dispozitivul de încercat poate fi o trusă.
e. Măsurarea rezistenței ohmice a înfășurării motoarelor.
Se aplică înfășurării de excitație a motoarelor de c.c. și fazelor înfășurărilor motoarelor de c.a.Rezultatele obținute nu trebuie să difere cu mult
mai mult de 2% față de datele inițiale de catalog. Proba se execută cu montaje de puncte de c.c.
19.
f. Proba de mers în gol. Este necesară pentru determinarea comportării diverselor părți componente ale mașinii. În această perioadăse controlează încălzirea diverselor părți, funcționarea stabilă, comutația la colector, funcționarea periilor, ungerea normală și se măsoară
vibrațiile lagărelor care nu trebuie să depășească 0,06 mm pentru motoarele cu turații de 3 000 t/min și 0,1 mm pentru cele cu turații < 1
500 t/min.
g. Proba de mers în sarcină. În atelierele de reparații, unde de regulă nu există standuri de probă adecvate, se utilizează două
metode:
1. cu frână electromagnetică,
2. încărcarea artificială a motorului.
Metoda de frână electromagnetică constă în folosirea unui grup motor-generator care alimentează un motor de c.c. de circa 10 kW,
folosit drept frână. La acest. motor de c.c., bobinajul polilor principali și auxiliari este modificat pentru tensiunea generatorului de
alimentare și legat în serie, în așa fel încât polii vecini să aibă polarități de sensuri contrare, iar rotorul este înlocuit cu un cilindru gol de
oțel, cu un întrefier de 2 mm.
Curentul de excitație al frânei sc reglează în limite largi cu ajutorul unui reostat. Drept cuplaj se poate folosi un universal de strung
montat pe arborele frânei.
În vederea probelor, motorul de încercat se cuplează cu frâna și se conectează la rețea. Se reglează curentul de excitație al frânei,
alimentat dc grupul motor-generator, treptat până când curentul în motorul de încercat atinge valoarea nominală (încărcarea se explică
astfel: prin rotirea cilindrului de oțel în câmpul magnetic produs dc polii frânei, apar în acesta curenți turbionari și se creează un cuplu de
frânare care echilibrează cuplul activ al motorului încercat).
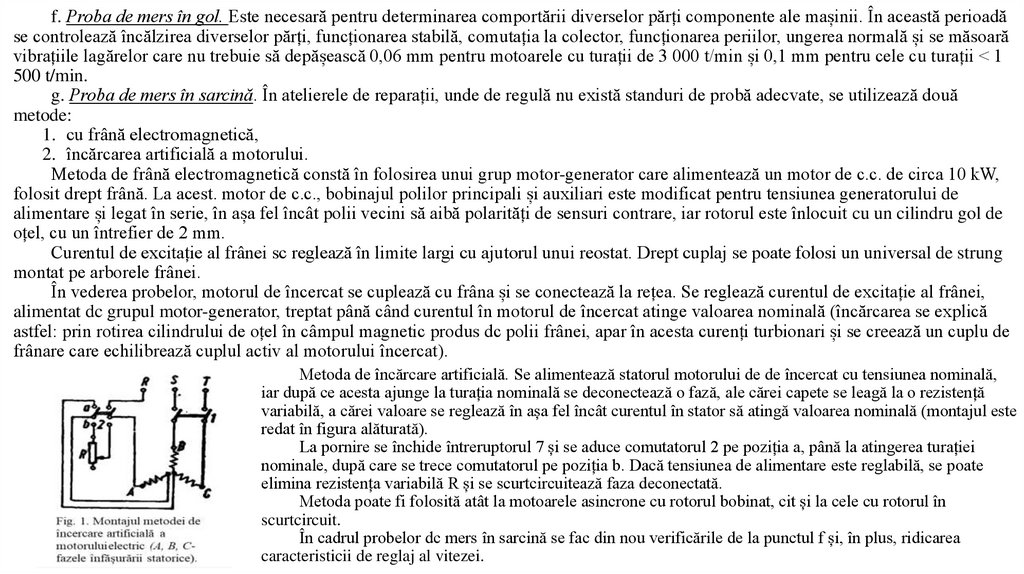
Metoda de încărcare artificială. Se alimentează statorul motorului de de încercat cu tensiunea nominală,
iar după ce acesta ajunge la turația nominală se deconectează o fază, ale cărei capete se leagă la o rezistență
variabilă, a cărei valoare se reglează în așa fel încât curentul în stator să atingă valoarea nominală (montajul este
redat în figura alăturată).
La pornire se închide întreruptorul 7 și se aduce comutatorul 2 pe poziția a, până la atingerea turației
nominale, după care se trece comutatorul pe poziția b. Dacă tensiunea de alimentare este reglabilă, se poate
elimina rezistența variabilă R și se scurtcircuitează faza deconectată.
Metoda poate fi folosită atât la motoarele asincrone cu rotorul bobinat, cit și la cele cu rotorul în
scurtcircuit.
În cadrul probelor dc mers în sarcină se fac din nou verificările de la punctul f și, în plus, ridicarea
caracteristicii de reglaj al vitezei.
20.
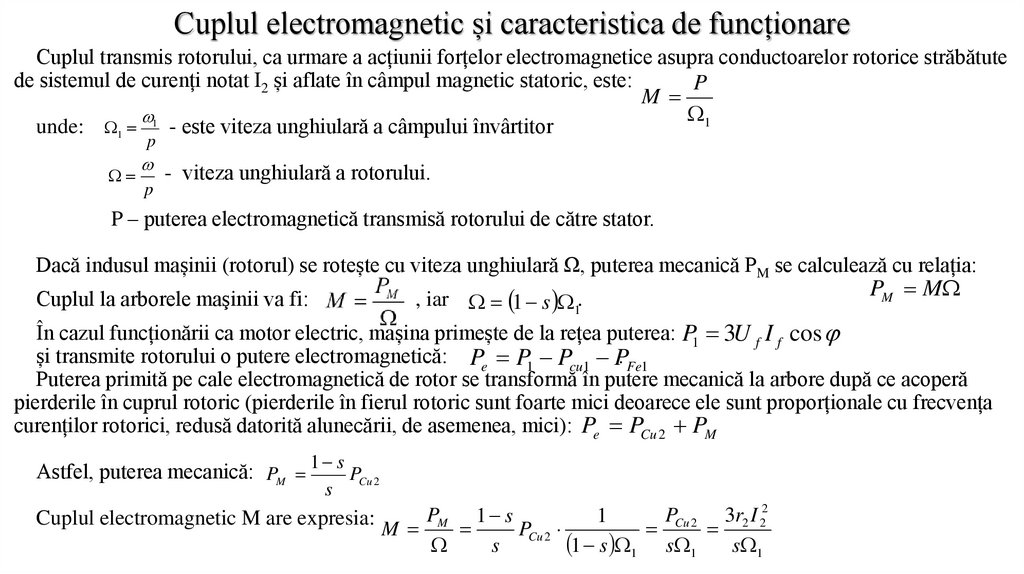
Cuplul electromagnetic și caracteristica de funcționareCuplul transmis rotorului, ca urmare a acțiunii forțelor electromagnetice asupra conductoarelor rotorice străbătute
de sistemul de curenți notat I2 și aflate în câmpul magnetic statoric, este:
P
M
1
unde: 1 1 - este viteza unghiulară a câmpului învârtitor
p
p
- viteza unghiulară a rotorului.
P – puterea electromagnetică transmisă rotorului de către stator.
Dacă indusul mașinii (rotorul) se rotește cu viteza unghiulară Ω, puterea mecanică PM se calculează cu relația:
PM M
, iar 1 s 1.
În cazul funcționării ca motor electric, mașina primește de la rețea puterea: P1 3U f I f cos
și transmite rotorului o putere electromagnetică: Pe P1 Pcu1 P
. Fe1
Puterea primită pe cale electromagnetică de rotor se transformă în putere mecanică la arbore după ce acoperă
pierderile în cuprul rotoric (pierderile în fierul rotoric sunt foarte mici deoarece ele sunt proporționale cu frecvența
curenților rotorici, redusă datorită alunecării, de asemenea, mici): Pe PCu 2 PM
Cuplul la arborele maşinii va fi:
Astfel, puterea mecanică: PM 1 s PCu 2
s
PCu 2 3r2 I 22
1
Cuplul electromagnetic M are expresia: M PM 1 s P
Cu 2
1 s 1 s 1 s 1
s
21.
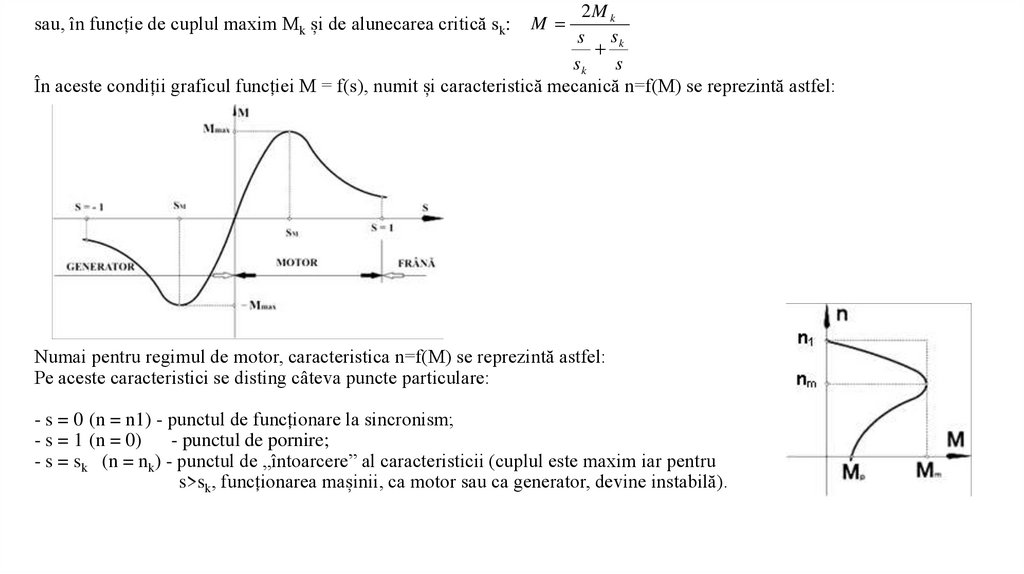
2M ks sk
sk
s
În aceste condiții graficul funcției M = f(s), numit și caracteristică mecanică n=f(M) se reprezintă astfel:
sau, în funcție de cuplul maxim Mk și de alunecarea critică sk:
M
Numai pentru regimul de motor, caracteristica n=f(M) se reprezintă astfel:
Pe aceste caracteristici se disting câteva puncte particulare:
- s = 0 (n = n1) - punctul de funcționare la sincronism;
- s = 1 (n = 0)
- punctul de pornire;
- s = sk (n = nk) - punctul de „întoarcere” al caracteristicii (cuplul este maxim iar pentru
s>sk, funcționarea mașinii, ca motor sau ca generator, devine instabilă).
22.
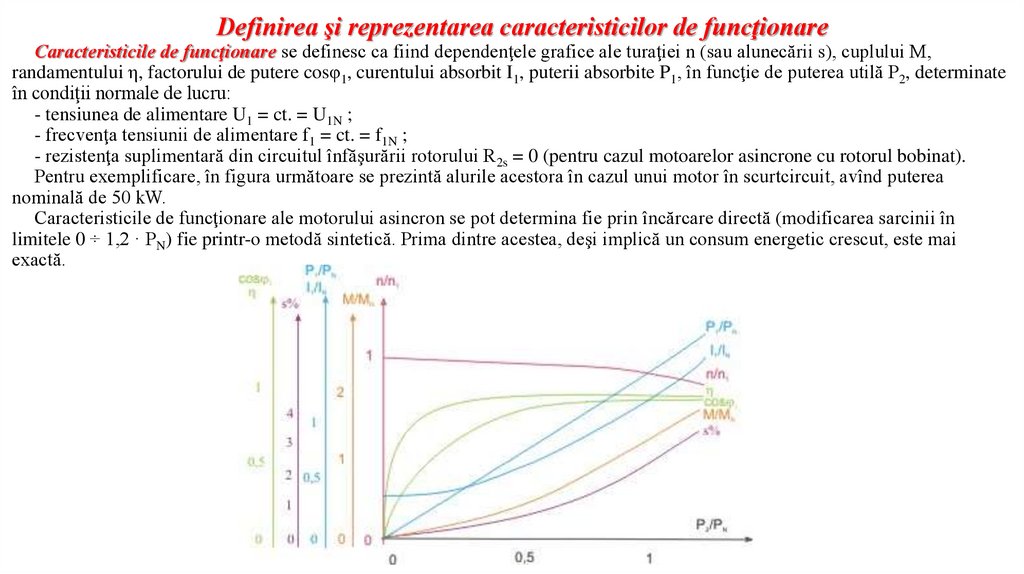
Definirea şi reprezentarea caracteristicilor de funcţionareCaracteristicile de funcţionare se definesc ca fiind dependenţele grafice ale turaţiei n (sau alunecării s), cuplului M,
randamentului η, factorului de putere cosφ1, curentului absorbit I1, puterii absorbite P1, în funcţie de puterea utilă P2, determinate
în condiţii normale de lucru:
- tensiunea de alimentare U1 = ct. = U1N ;
- frecvenţa tensiunii de alimentare f1 = ct. = f1N ;
- rezistenţa suplimentară din circuitul înfăşurării rotorului R2s = 0 (pentru cazul motoarelor asincrone cu rotorul bobinat).
Pentru exemplificare, în figura următoare se prezintă alurile acestora în cazul unui motor în scurtcircuit, avînd puterea
nominală de 50 kW.
Caracteristicile de funcţionare ale motorului asincron se pot determina fie prin încărcare directă (modificarea sarcinii în
limitele 0 ÷ 1,2 · PN) fie printr-o metodă sintetică. Prima dintre acestea, deşi implică un consum energetic crescut, este mai
exactă.
23.
Determinarea experimentală a caracteristicilor de funcţionare - încărcaredirectă
Se presupun cunoscute pierderile mecanice şi de ventilaţie pmec+v şi pierderile în fier PFe , separate printr-o probă
de mers în gol, precum şi rezistenţa R1 măsurată în stare caldă.
Se măsoară, pentru fiecare încărcare, puterea absorbită P1, curentul I1, alunecarea s şi se calculează
Prelucrarea rezultatelor experimentale decurge după cum urmează:
Scăzând din puterea P1 pierderile din înfăşurarea statorică pJ1 = m1 R1 I12 şi pierderile în fier, se obţine puterea
electromagnetică PM şi, la altă scară, cuplul electromagnetic M.
Întrucât alunecarea s este măsurată, se pot calcula şi pierderile din înfăşurarea rotorică pJ2 = s PM.
Dacă se scad, în continuare, din PM, pierderile pJ2 şi pmec+v se obţine puterea utilă P2 şi respectiv randamentul η =
P2 / P 1 .
Repetând calculele pentru diverse încărcări, se determină experimental caracteristicile de funcţionare căutate.
Determinarea experimentală a caracteristicilor de funcţionare - metodă
sintetică
Trasarea caracteristicilor de funcţionare se poate face şi cu ajutorul diagramei cercului, obţinută cu ajutorul
încercărilor în gol şi de scurtcircuit.
Precizia rezultatelor este însă funcţie de măsura în care locul geometric este într-adevăr un cerc.
Metoda este aplicabilă la maşinile cu rotor bobinat şi cu rotor cu colivie normală.
24.
Comentarii asupra caracteristicilor:1. n = f(P2)
Dependenţa n = f(P2) are o formă asemănătoare cu n = (M), (pe figura anterioară a fost
reprezentată doar porţiunea corespunzătoare intervalului 0 ÷ sk).
Din analiza acestei dependenţe rezultă că turaţia scade foarte puţin cu încărcarea. Se spune că
această caracteristică este rigidă.
2. η = f(P2)
Forma curbei randamentului este asemănătoare cu cea întâlnită la transformator. Valorile sale
nominale, pentru cazul motoarelor de putere mijlocie, aparţin, în general domeniului 0,85 ÷ 0,9.
Aceste valori sunt mai mici decât în cazul transformatorului datorită existenţei pierderilor
mecanice şi de ventilaţie, respectiv a unor categorii de pierderi suplimentare.
3. cos φ1 = f(P2)
Caracteristica factorului de putere, cos φ1 = f(P2), are o alură asemănătoare cu cea a
randamentului.
Datorită faptului că motorul asincron absoarbe putere reactivă, pentru magnetizare, factorul de
putere este totdeauna subunitar.
25.
3.1.2Metode de pornire a motoarelor asincrone cu rotorul în scurtcircuit.
1. Pornirea prin cuplarea directă la rețea.
2. Pornirea stea – triunghi.
3. Pornirea cu bobine de reactanță.
4. Reglarea vitezei și schimbarea sensului de rotație.
26.
Metode de pornire a motoarelor electrice asincronePentru pornirea motoarelor asincrone trebuie asigurate următoarele condiții:
cuplul de pornire să fie suficient de mare
curentul de pornire să nu depășească valoarea admisibilă pentru rețeaua de alimentare a motorului
durata procesului să fie cât mai scurtă
Alegerea metodei de pornire se face funcție de rețeaua de alimentare (dacă este suficient de puternică)
și funcție de mecanismul acționat de motor.
Motoarele asincrone cu rotorul în scurtcircuit pot fi pornite utilizând următoarele metode:
a) pornirea prin cuplare directă la rețea;
b) pornirea stea-triunghi;
c) pornirea cu bobine de reactanțe;
d) pornirea cu autotransformator.
27.
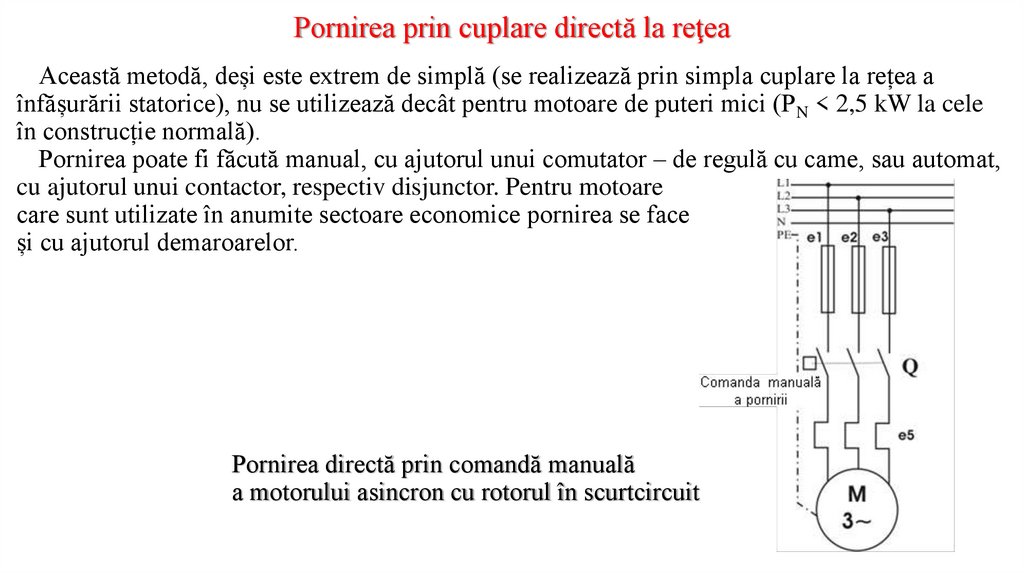
Pornirea prin cuplare directă la reţeaAceastă metodă, deși este extrem de simplă (se realizează prin simpla cuplare la rețea a
înfășurării statorice), nu se utilizează decât pentru motoare de puteri mici (PN < 2,5 kW la cele
în construcție normală).
Pornirea poate fi făcută manual, cu ajutorul unui comutator – de regulă cu came, sau automat,
cu ajutorul unui contactor, respectiv disjunctor. Pentru motoare
care sunt utilizate în anumite sectoare economice pornirea se face
și cu ajutorul demaroarelor.
Pornirea directă prin comandă manuală
a motorului asincron cu rotorul în scurtcircuit
28.
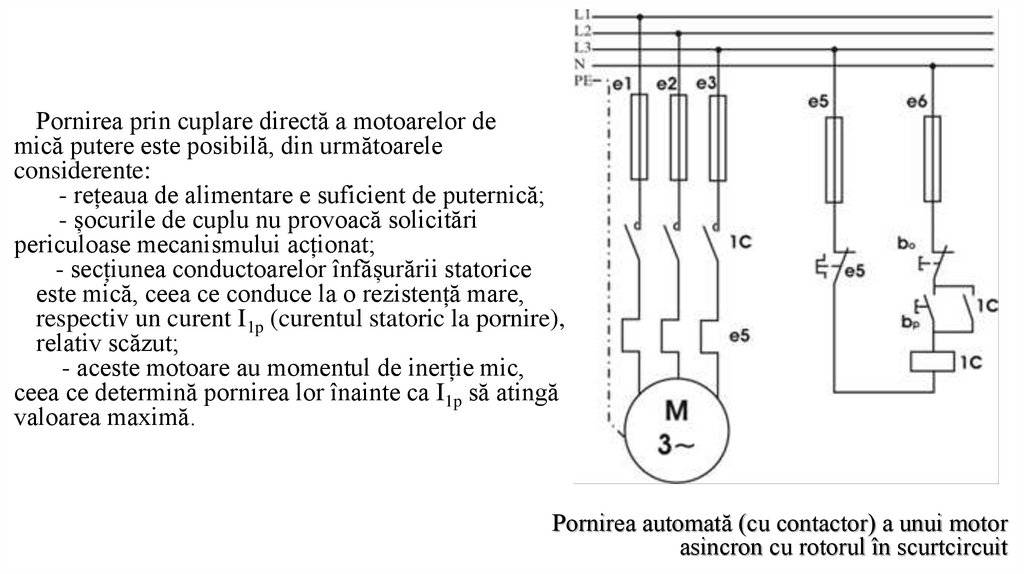
Pornirea prin cuplare directă a motoarelor demică putere este posibilă, din următoarele
considerente:
- rețeaua de alimentare e suficient de puternică;
- șocurile de cuplu nu provoacă solicitări
periculoase mecanismului acționat;
- secțiunea conductoarelor înfășurării statorice
este mică, ceea ce conduce la o rezistență mare,
respectiv un curent I1p (curentul statoric la pornire),
relativ scăzut;
- aceste motoare au momentul de inerție mic,
ceea ce determină pornirea lor înainte ca I1p să atingă
valoarea maximă.
Pornirea automată (cu contactor) a unui motor
asincron cu rotorul în scurtcircuit
29.
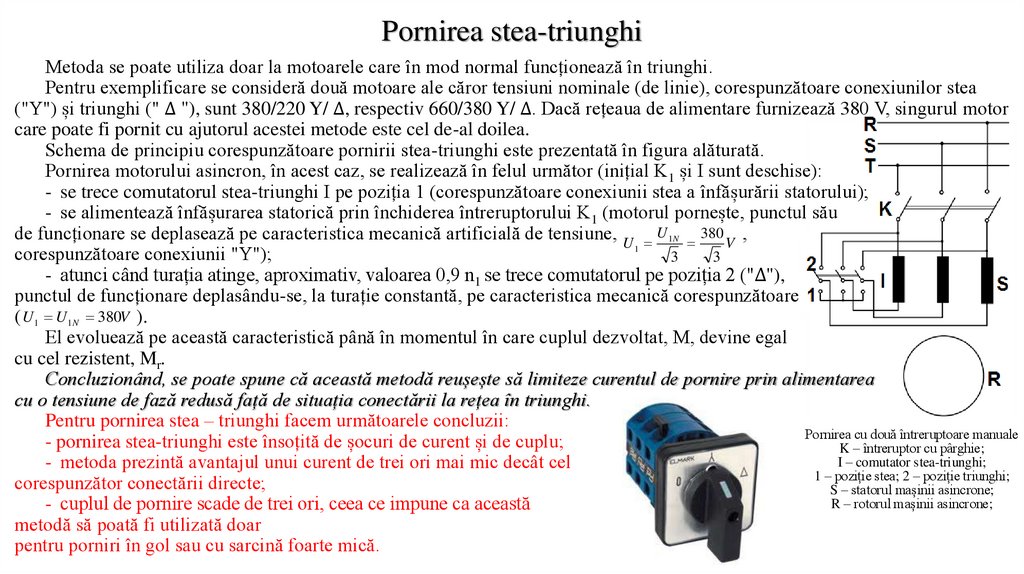
Pornirea stea-triunghiMetoda se poate utiliza doar la motoarele care în mod normal funcționează în triunghi.
Pentru exemplificare se consideră două motoare ale căror tensiuni nominale (de linie), corespunzătoare conexiunilor stea
("Y") și triunghi (" Δ "), sunt 380/220 Y/ Δ, respectiv 660/380 Y/ Δ. Dacă rețeaua de alimentare furnizează 380 V, singurul motor
care poate fi pornit cu ajutorul acestei metode este cel de-al doilea.
Schema de principiu corespunzătoare pornirii stea-triunghi este prezentată în figura alăturată.
Pornirea motorului asincron, în acest caz, se realizează în felul următor (inițial K1 și I sunt deschise):
- se trece comutatorul stea-triunghi I pe poziția 1 (corespunzătoare conexiunii stea a înfășurării statorului);
- se alimentează înfășurarea statorică prin închiderea întreruptorului K1 (motorul pornește, punctul său
de funcționare se deplasează pe caracteristica mecanică artificială de tensiune, U U 1N 380 V ,
1
corespunzătoare conexiunii "Y");
3
3
- atunci când turația atinge, aproximativ, valoarea 0,9 n1 se trece comutatorul pe poziția 2 ("Δ"),
punctul de funcționare deplasându-se, la turație constantă, pe caracteristica mecanică corespunzătoare
( U 1 U 1N 380V ).
El evoluează pe această caracteristică până în momentul în care cuplul dezvoltat, M, devine egal
cu cel rezistent, Mr.
Concluzionând, se poate spune că această metodă reușește să limiteze curentul de pornire prin alimentarea
cu o tensiune de fază redusă față de situația conectării la rețea în triunghi.
Pentru pornirea stea – triunghi facem următoarele concluzii:
Pornirea cu două întreruptoare manuale
- pornirea stea-triunghi este însoțită de șocuri de curent și de cuplu;
K – întreruptor cu pârghie;
I – comutator stea-triunghi;
- metoda prezintă avantajul unui curent de trei ori mai mic decât cel
1 – poziție stea; 2 – poziție triunghi;
corespunzător conectării directe;
S – statorul mașinii asincrone;
R – rotorul mașinii asincrone;
- cuplul de pornire scade de trei ori, ceea ce impune ca această
metodă să poată fi utilizată doar
pentru porniri în gol sau cu sarcină foarte mică.
30.
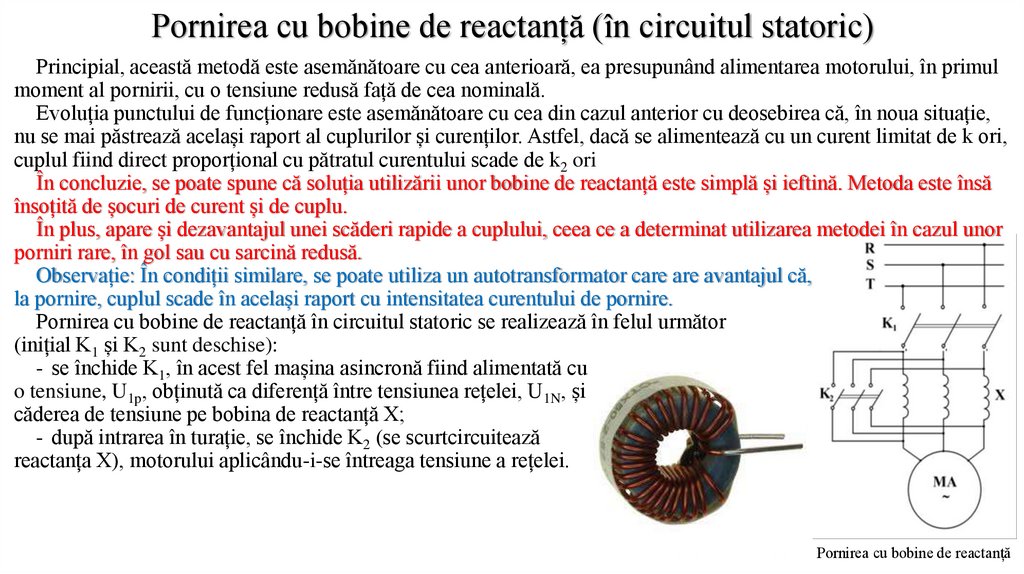
Pornirea cu bobine de reactanță (în circuitul statoric)Principial, această metodă este asemănătoare cu cea anterioară, ea presupunând alimentarea motorului, în primul
moment al pornirii, cu o tensiune redusă față de cea nominală.
Evoluția punctului de funcționare este asemănătoare cu cea din cazul anterior cu deosebirea că, în noua situație,
nu se mai păstrează același raport al cuplurilor și curenților. Astfel, dacă se alimentează cu un curent limitat de k ori,
cuplul fiind direct proporțional cu pătratul curentului scade de k2 ori
În concluzie, se poate spune că soluția utilizării unor bobine de reactanță este simplă și ieftină. Metoda este însă
însoțită de șocuri de curent și de cuplu.
În plus, apare și dezavantajul unei scăderi rapide a cuplului, ceea ce a determinat utilizarea metodei în cazul unor
porniri rare, în gol sau cu sarcină redusă.
Observație: În condiții similare, se poate utiliza un autotransformator care are avantajul că,
la pornire, cuplul scade în același raport cu intensitatea curentului de pornire.
Pornirea cu bobine de reactanță în circuitul statoric se realizează în felul următor
(inițial K1 și K2 sunt deschise):
- se închide K1, în acest fel mașina asincronă fiind alimentată cu
o tensiune, U1p, obținută ca diferență între tensiunea rețelei, U1N, și
căderea de tensiune pe bobina de reactanță X;
- după intrarea în turație, se închide K2 (se scurtcircuitează
reactanța X), motorului aplicându-i-se întreaga tensiune a rețelei.
Pornirea cu bobine de reactanță
31.
Reglarea vitezei la motoarele asincroneModificarea turației motoarelor asincrone, în timpul funcționării, se poate realiza, prin modificarea parametrilor de care
depinde caracteristica mecanică, și anume:
- modificarea, în sensul creșterii, a rezistenței circuitului rotoric prin introducerea unei rezistențe electrice reglabile, în circuitul
rotoric (metodă utilizată la motoarele asincrone cu rotorul bobinat), metodă de regulă neeconomică;
- schimbarea numărului de perechi de poli ai înfășurării statorice (prin această metodă se obține o variație în trepte a vitezei)
U
- modificarea frecvenței tensiunii de alimentare.
const.
- modificarea tensiunii de alimentare și a frecvenței în același timp astfel încât raportul f
, metoda cea mai utilizată în
prezent datorită progreselor din domeniul electronicii de putere și posibilităților de a realiza surse de tensiune alternativă
reglabilă.
Reglarea vitezei prin modificarea numărului
de perechi de poli magnetici de pe stator:
cele trei înfășurări de fază sunt realizate din câte
două semi bobine care sunt conectate în două
moduri diferite (o variantă – înseriate și
conectate în triunghi, cealaltă variantă –
în paralel și legate în stea).
Comanda celor două conexiuni se realizează
cu un comutator special.
32.
Schimbarea sensului de rotațiePentru schimbarea sensului de rotație al motoarelor asincrone trifazate este suficient să se schimbe două faze
între ele, la alimentare. Comanda poate fi făcută manual sau automat.
Schema de conectarea a inversorului de sens