









 Электроника
ЭлектроникаПохожие презентации:

Robosumo loyihasi
1.
Mavzu: Robosumoloyihasi
• o'qituvchi: O'rishov S
2.
• Robo sumo bu - muayyano'lcham va xususiyatlarga ega
o'zini o'zi boshqaradigan
robot.
• Shuningdek, u jang qilish
uchun mos keladigan
dushman shakllarda
yaratilgan
3.
KOMPONENTLAR VAMATERIALLAR
• Arduino Uno
• DC dvigatel
• Arduino uchun Driverlar
• Ultrasonic sensor
• Batareka
• Ulash uchun simlar
• Asosiy qism (tana)
4.
• Ushbu loyihaning sxemasi5.
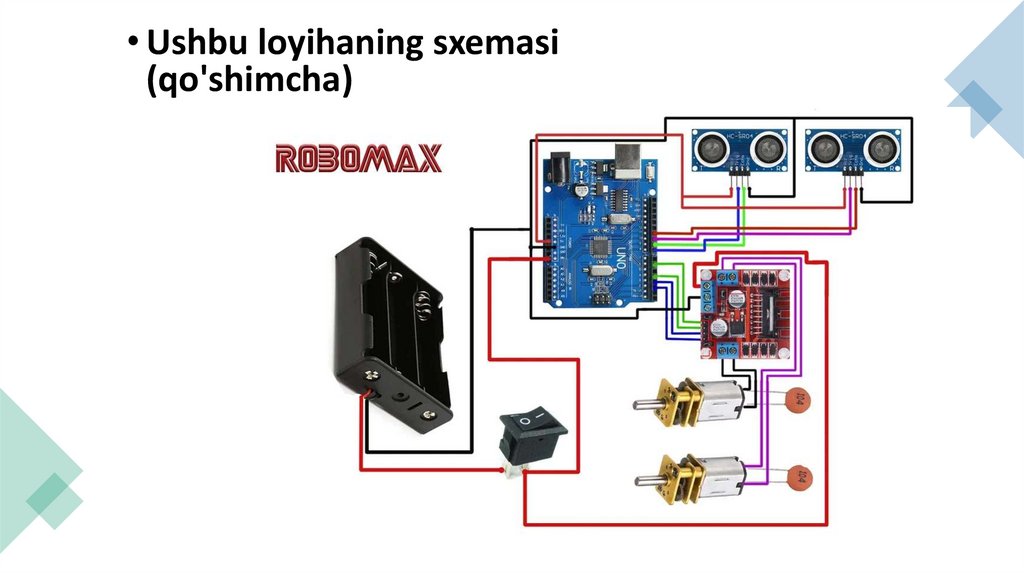
• Ushbu loyihaning sxemasi(qo'shimcha)
6.
Sumo carning tashqi ko'rinishi7.
Sumo carningbir necha xilko'rinishlari mavjud
8.
Robotning ko'zlari infraqizil va ultravtovush datchiklardir. Ular yordamida dushmanni topish mumkinRobot chegarani "qidirish" uchun mas'ul bo'lgan bir nechta IR datchiklari bilan jihozlangan.
Old datchiklar odatda harakat tezligini boshqarishga yordam beradi jangchi haddan tashqari g'ayrat tufayli maydonni tark etmasligi kerak.
rqa datchiklar halqa chegarasiga yaqinlashishni “kuzatadi”: ulardan javob olgan robot
harakat yo‘nalishini o‘zgartiradi.
9.
Dastur manba kodi•#include <AFMotor.h>
// AFMotor kutubxonasini yuklab olinadi , agar
siz motor shielddan foydalansangiz
•AF_DCMotor motor1(1);
• AF_DCMotor motor2(2); .
• ;
10.
• Ozgaruvchi kiritib olinadi ultasonicdan kelgan signalni qabulqilib uni bitta o'zgaruvchiga tenglab olamiz
• Va sensor pinlarini ham qaysi pinga ulaganimizni aniqlab
ketamiz
•int trigPin = 9;
•int echoPin = 10;
•int davomiylik, sm;
11.
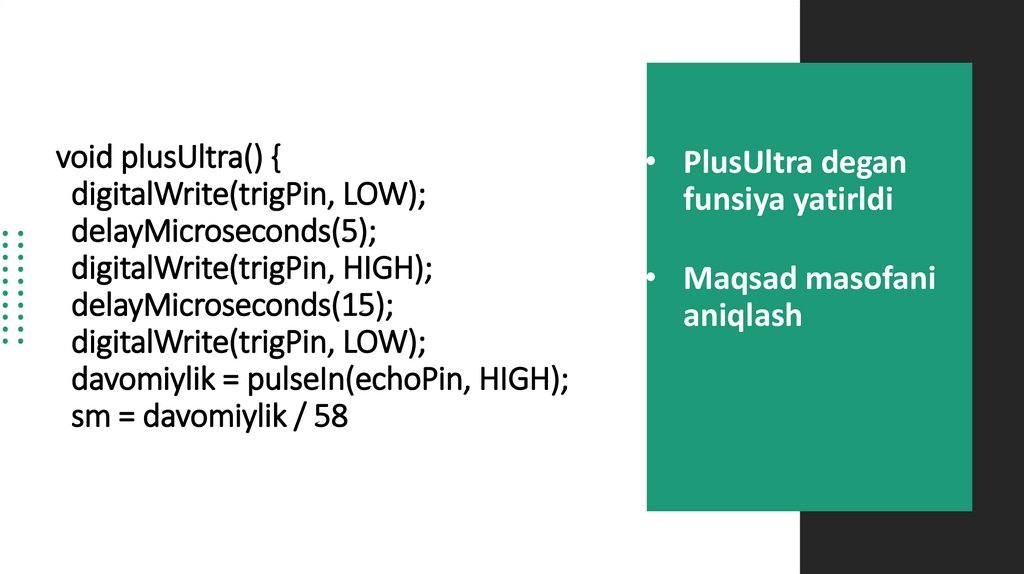
void plusUltra() {digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(15);
digitalWrite(trigPin, LOW);
davomiylik = pulseIn(echoPin, HIGH);
sm = davomiylik / 58
• PlusUltra degan
funsiya yatirldi
• Maqsad masofani
aniqlash
12.
Setup qismida bizPinMode commandasi
orqali pinlarni elon
qilib oldik,
void setup() {
//Serial.begin(9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
delay(5000); // 5 Sekund kutib turish
motor uchun tezlikni
belgilab oldik
motor1.setSpeed(255); // Tezlik 0 dan 255
gacha o'zgartirish mumkin
motor1.run(RELEASE);
motor2.setSpeed(255); // Tezlik 2- Motor
uchun
motor2.run(RELEASE);
13.
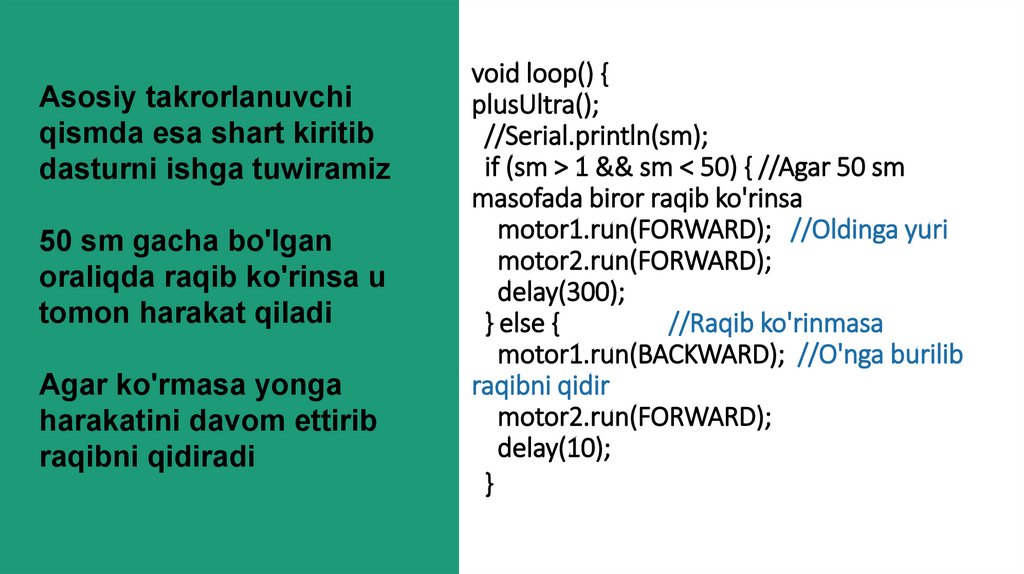
Asosiy takrorlanuvchiqismda esa shart kiritib
dasturni ishga tuwiramiz
50 sm gacha bo'lgan
oraliqda raqib ko'rinsa u
tomon harakat qiladi
Agar ko'rmasa yonga
harakatini davom ettirib
raqibni qidiradi
void loop() {
plusUltra();
//Serial.println(sm);
if (sm > 1 && sm < 50) { //Agar 50 sm
masofada biror raqib ko'rinsa
motor1.run(FORWARD); //Oldinga yuri
motor2.run(FORWARD);
delay(300);
} else {
//Raqib ko'rinmasa
motor1.run(BACKWARD); //O'nga burilib
raqibni qidir
motor2.run(FORWARD);
delay(10);
}
14.
XulosaBiz bugungi lohiymizda bitta ultrasonic
sensori yordamida robosumoga dastur
tuzdik . Lekin yuqorida ko'rsatilganidek
siz ko'p ultrasonic bilan robot yasab
ungaham shu yo'nalishda dastur
tuzishingiz mumkin
Qo'shimcha savollar bo'lsa telegram
orqali murojat qilishingiz mumkin
15.
E'TIBORINGIZ UCHUN RAXMATThis Photo by Unknown author is licensed under CC BY-NC-ND.