
 Промышленность
ПромышленностьПохожие презентации:










Основные типы гидравлических и пневматических датчиков
1.
Основные типы гидравлических ипневматических датчиков.
Характеристики, конструкции,
сфера применения
2.
Пневматические датчики предназначены для непрерывногопреобразования текущего значения технологического параметра в
пневматический сигнал. (0,2-1кгс/см2). Давление питания 1,4 кгс/см2.
приборы предназначены для измерения давления (также расхода и
уровня) неагрессивных и агрессивных жидкостей и газов с выдачей
информации в виде стандартного пневматического выходного сигнала
20-100кПа.
Пневматический сигнал, в основном, используется в системах контроля и
управления технологическим процессами во взрывоопасных условиях (в
химической, нефтеперерабатывающей, нефтехимической, угольной
промышленности, в энергетики, судостроении и ряде других отраслей,
где применение электрических сигналов ограничено спецификой
условий эксплуатации.
Принцип действия основан на пневматической силовой
компенсации: под воздействием давления чувствительный элемент
передает усилие на рычаг, поворачивающий заслонку относительно
сопла, в результате чего меняется давление в камере пневмореле и в
связанной с ней системе обратной связи. Это давление и является
пневматическим выходным сигналом прибора.
3.
Пневматические датчики ввиду простоты ихустройства получают широкое распространение при
контроле точных деталей в массовом и серийном
производстве, особенно при измерении в процессе
обработки и при автоматизации контроля. Работа
пневматических датчиков основана на изменении расхода
или давления воздуха в зависимости от площади
выходного отверстия, дающего выход воздуху в
атмосферу.
По
способу
определения
расхода
воздуха
пневматические приборы делятся на две группы:
приборы с переменным перепадом давления;
приборы с постоянным перепадом давления.
Приборы с переменным перепадом давления, в свою
очередь, делятся на приборы низкого давления (500 —
1200 кгс/м2) и приборы высокого давления (1 — 2,5
кгс/см2 и более).
4.
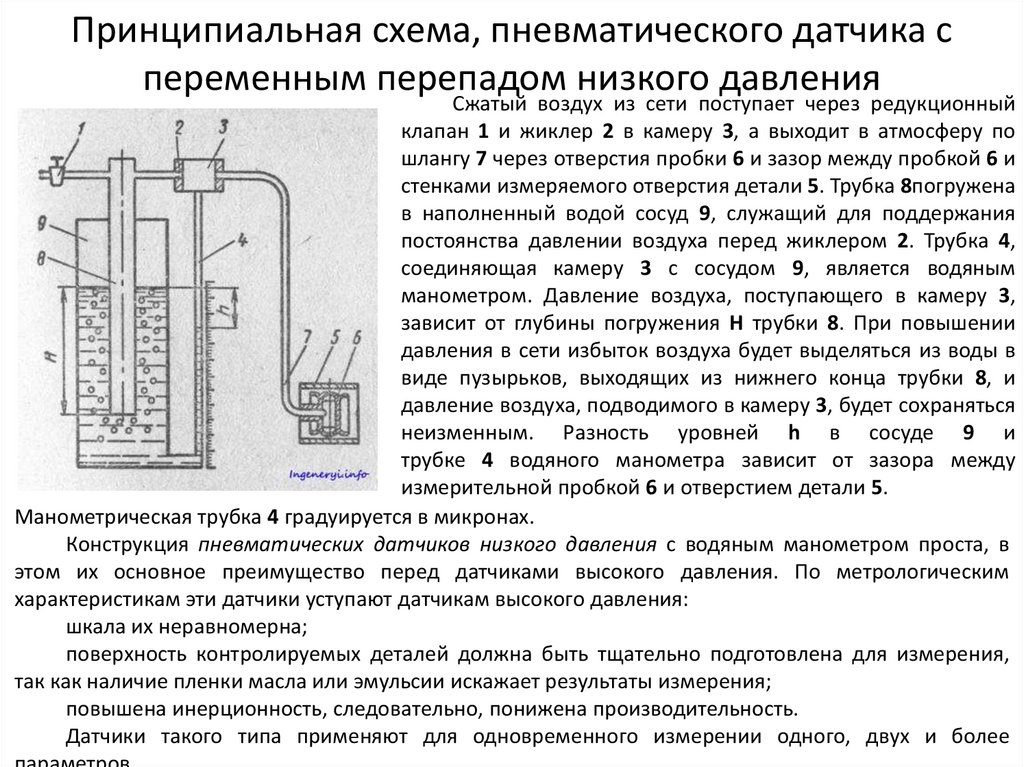
Принципиальная схема, пневматического датчика спеременным перепадом низкого давления
Сжатый воздух из сети поступает через редукционный
клапан 1 и жиклер 2 в камеру 3, а выходит в атмосферу по
шлангу 7 через отверстия пробки 6 и зазор между пробкой 6 и
стенками измеряемого отверстия детали 5. Трубка 8погружена
в наполненный водой сосуд 9, служащий для поддержания
постоянства давлении воздуха перед жиклером 2. Трубка 4,
соединяющая камеру 3 с сосудом 9, является водяным
манометром. Давление воздуха, поступающего в камеру 3,
зависит от глубины погружения Н трубки 8. При повышении
давления в сети избыток воздуха будет выделяться из воды в
виде пузырьков, выходящих из нижнего конца трубки 8, и
давление воздуха, подводимого в камеру 3, будет сохраняться
неизменным. Разность уровней h в сосуде 9 и
трубке 4 водяного манометра зависит от зазора между
измерительной пробкой 6 и отверстием детали 5.
Манометрическая трубка 4 градуируется в микронах.
Конструкция пневматических датчиков низкого давления с водяным манометром проста, в
этом их основное преимущество перед датчиками высокого давления. По метрологическим
характеристикам эти датчики уступают датчикам высокого давления:
шкала их неравномерна;
поверхность контролируемых деталей должна быть тщательно подготовлена для измерения,
так как наличие пленки масла или эмульсии искажает результаты измерения;
повышена инерционность, следовательно, понижена производительность.
Датчики такого типа применяют для одновременного измерении одного, двух и более
5.
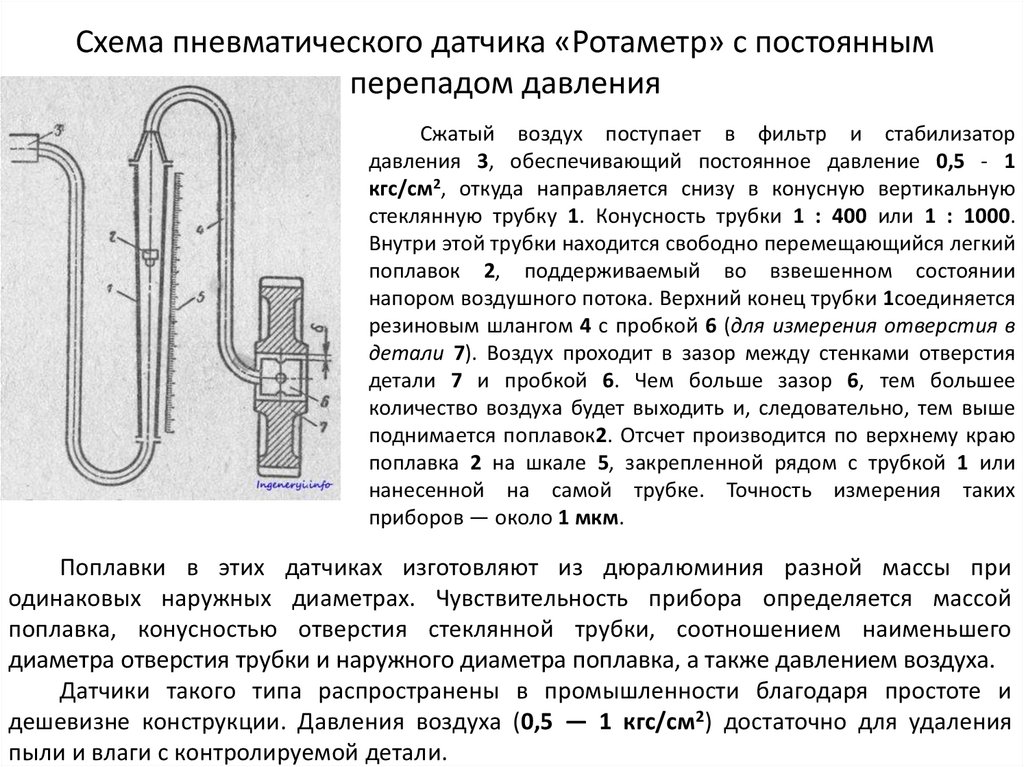
Схема пневматического датчика «Ротаметр» с постояннымперепадом давления
Сжатый воздух поступает в фильтр и стабилизатор
давления 3, обеспечивающий постоянное давление 0,5 - 1
кгс/см2, откуда направляется снизу в конусную вертикальную
стеклянную трубку 1. Конусность трубки 1 : 400 или 1 : 1000.
Внутри этой трубки находится свободно перемещающийся легкий
поплавок 2, поддерживаемый во взвешенном состоянии
напором воздушного потока. Верхний конец трубки 1соединяется
резиновым шлангом 4 с пробкой 6 (для измерения отверстия в
детали 7). Воздух проходит в зазор между стенками отверстия
детали 7 и пробкой 6. Чем больше зазор 6, тем большее
количество воздуха будет выходить и, следовательно, тем выше
поднимается поплавок2. Отсчет производится по верхнему краю
поплавка 2 на шкале 5, закрепленной рядом с трубкой 1 или
нанесенной на самой трубке. Точность измерения таких
приборов — около 1 мкм.
Поплавки в этих датчиках изготовляют из дюралюминия разной массы при
одинаковых наружных диаметрах. Чувствительность прибора определяется массой
поплавка, конусностью отверстия стеклянной трубки, соотношением наименьшего
диаметра отверстия трубки и наружного диаметра поплавка, а также давлением воздуха.
Датчики такого типа распространены в промышленности благодаря простоте и
дешевизне конструкции. Давления воздуха (0,5 — 1 кгс/см2) достаточно для удаления
пыли и влаги с контролируемой детали.
6.
Пневмоэлектроконтактные датчики по принципу действияделят на простыеи дифференциальные. В простых датчиках
перемещение жидкости или упругого элемента (пружины,
сильфона) определяется измерительным давлением.
У этих датчиков недостаточная стабильность и точность работы
из-за
колебания
рабочего
давления,
поэтому
их
вытесняют дифференциальные датчики, обладающие большей
точностью и стабильностью. Показания дифференциального
датчика
соответствуют
разности
давлений
в
ветвях
пневматической системы, работа которой мало зависит от
погрешностей стабилизатора давления воздуха. Применяют
дифференциальные
пневмоэлектроконтактные
датчики
следующих
типов: ртутные, мембранные,пружинные (сильфонные)
икомбинированные.
Дифференциальными датчиками удобно измерять диаметры,
овальность, конусность внутренних и наружных цилиндрических
поверхностей.
7.
К основным преимуществом пневматических датчиков относятся:• взрыво- и пожаробезопасность;
• возможность работы в условиях вибрации и радиации;
• относительная простота конструкций;
• надежность в работе, легкость и компактность конструкций;
• отсутствие возвратных линий и безопасность утечки воздуха.
Недостатки пневматических датчиков:
• необходимость специального источника питания (компрессора);
• высокие требования к очистке воздуха от пыли, влаги и масла;
• значительная сжимаемость воздуха, в результате чего имеют
место запаздывания в действии датчиков, особенно при значительных
расстояниях (более 50 м);
• низкое быстродействие.