











































































































































 Электроника
ЭлектроникаПохожие презентации:




")




")
Одноплатная ЭВМ «Arduino»
1.
Одноплатная ЭВМ«Arduino»
Микроконтроллер
ATMega328
2.
Семейство AVR-контроллеровУ АVR-контроллеров есть две особенности, которые
отличают это семейство от остальных МК.
1. Система команд и архитектура ядра АVR
разрабатывались совместно с фирмой-разработчиком
компиляторов с языков программирования высокого уровня IAR
Systems. В результате появилась возможность писать АVRпроrраммы на языке С без большой потери в производительности
по сравнению с программами, написанными на ассемблере.
2. Одним из существенных преимуществ АVR стало
применение конвейера. В результате для АVR не существует
понятия машинного цикла: большинство команд выполняется за
один такт. Для сравнения отметим, что пользующиеся большой
популярностью МК семейства PIC выполняют команду за 4 такта, а
классические 8051 - 12 тактов.
3.
Семейство AVR-контроллеровТри самых распространенных семейств контроллеров.
1. Контроллеры классической архитектуры х51 (первые
микросхемы семейства 8051 были выпущены еще в начале 1980'-х)
лучше всего подходят для общего изучения предмета. Отметим, что
кроме Atmel, х51-совместимые изделия выпускают еще порядка
десятка фирм, включая такие гиганты, как Philips и Siemens, есть и
отечественные аналоги (серии 1816, 1830 и др.), что делает эту
архитектуру наиболее универсальной.
2. Семейство АVR рекомендуется для начинающих
электронщиков-практиков, в силу простоты и универсальности
устройства, преемственности структуры для различных типов
контроллеров, простоты схемотехники и программирования (в
данном случае под «программированием» понимается процесс
записи программ в микросхему).
3. PIC фирмы Microchip идеально подходят для
проектирования несложных устройств, особенно предназначенных
для тиражирования.
4.
Корпус микроконтроллерасемейства ATMega
5.
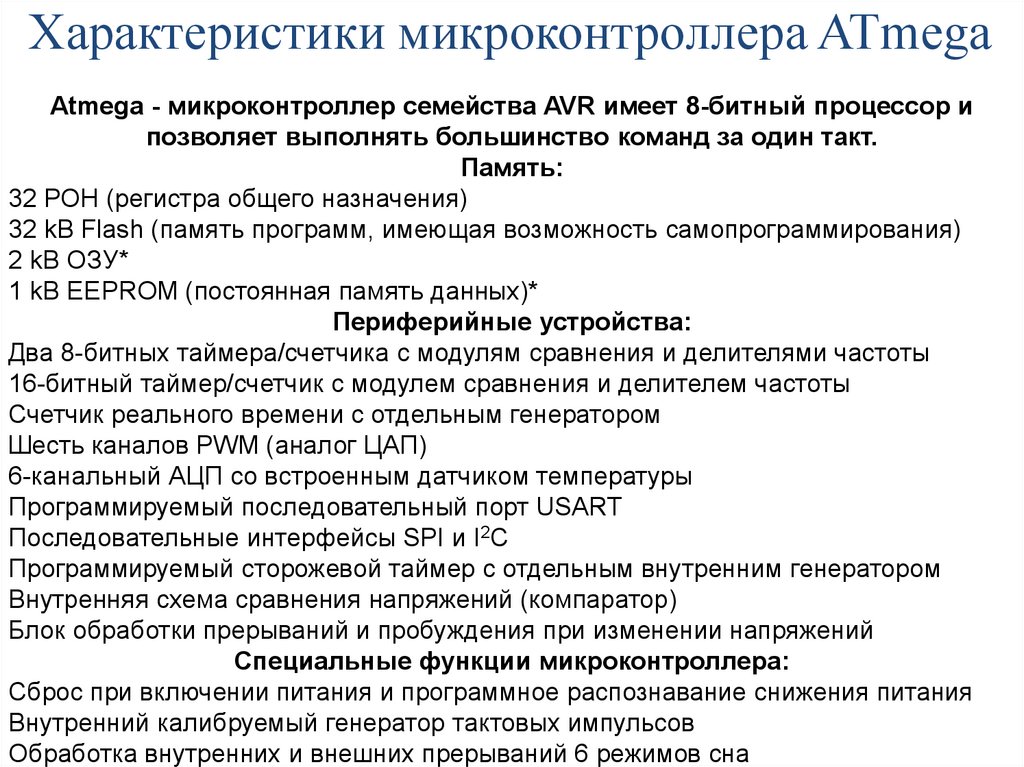
Характеристики микроконтроллера ATmegaAtmega - микроконтроллер семейства AVR имеет 8-битный процессор и
позволяет выполнять большинство команд за один такт.
Память:
32 РОН (регистра общего назначения)
32 kB Flash (память программ, имеющая возможность самопрограммирования)
2 kB ОЗУ*
1 kB EEPROM (постоянная память данных)*
Периферийные устройства:
Два 8-битных таймера/счетчика с модулям сравнения и делителями частоты
16-битный таймер/счетчик с модулем сравнения и делителем частоты
Счетчик реального времени с отдельным генератором
Шесть каналов PWM (аналог ЦАП)
6-канальный АЦП со встроенным датчиком температуры
Программируемый последовательный порт USART
Последовательные интерфейсы SPI и I2C
Программируемый сторожевой таймер с отдельным внутренним генератором
Внутренняя схема сравнения напряжений (компаратор)
Блок обработки прерываний и пробуждения при изменении напряжений
Специальные функции микроконтроллера:
Сброс при включении питания и программное распознавание снижения питания
Внутренний калибруемый генератор тактовых импульсов
Обработка внутренних и внешних прерываний 6 режимов сна
6.
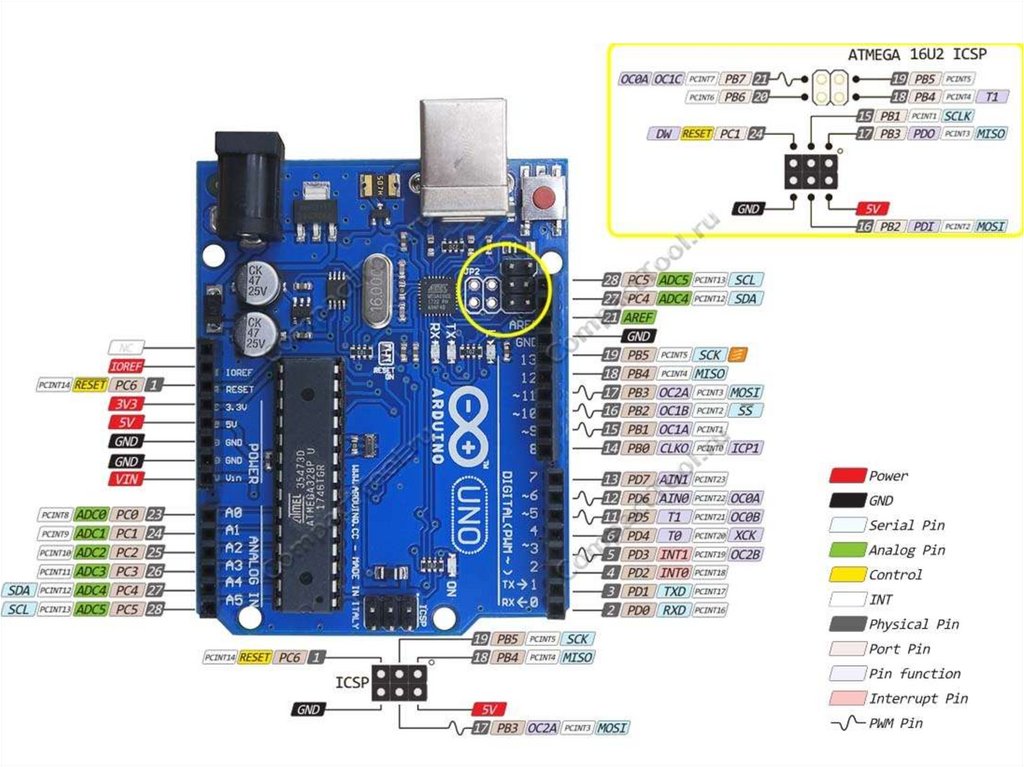
Выводы микроконтроллера ATMega7.
Назначение выводов ATMega8.
Программаторы ATMEL, параллельныйпорт LPT
9.
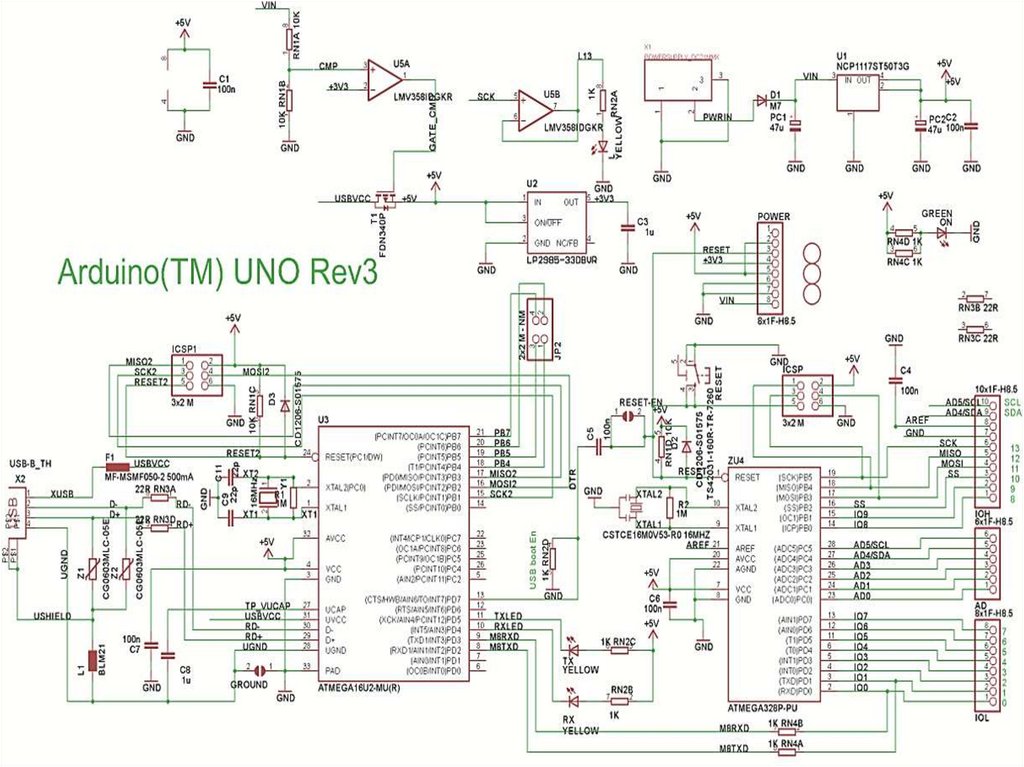
Одноплатная ЭВМ Arduino UNO10.
11.
12.
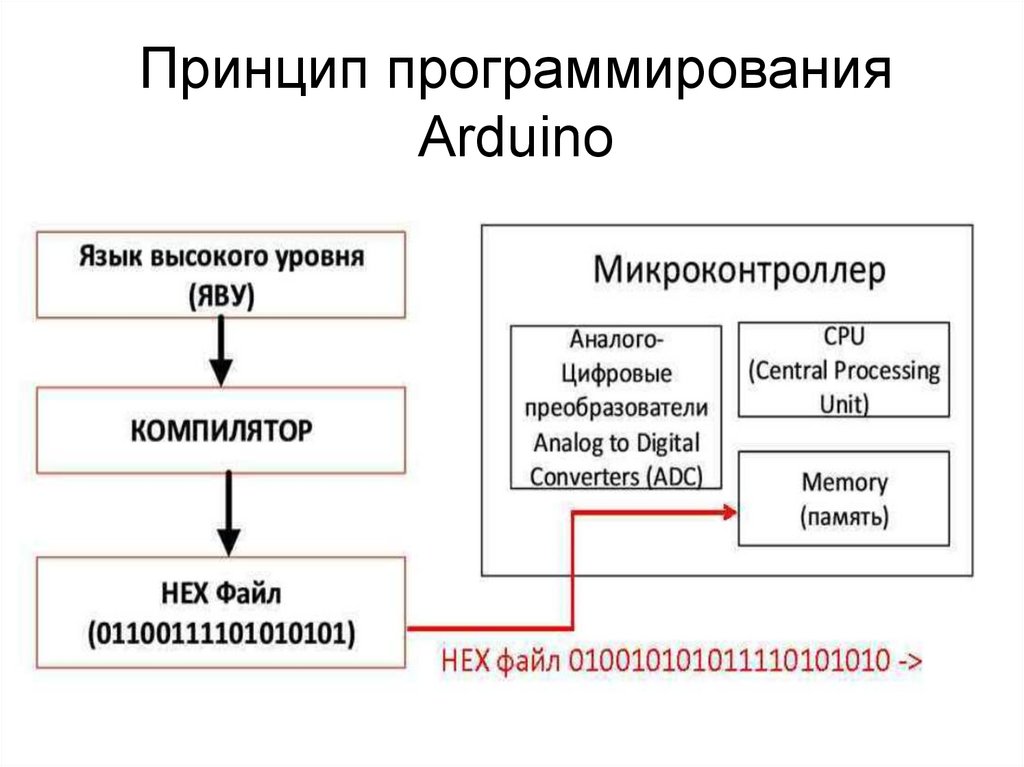
Принцип программированияArduino
13.
14.
Архитектура контроллеров семейства AVR15.
Архитектура контроллеров семейства AVRПроцессорное ядро (Central Processing Unit – CPU)
AVR-микроконтроллеров содержит:
1. Арифметико-логическое устройство (АЛУ).
2. Регистры общего назначения (РОН).
3. Программный счётчик.
4. Указатель стека.
5. Регистр состояния.
6. Регистр команд.
7. Дешифратор команд.
8. Схему управления выполнением команд.
16.
Архитектура контроллеров семейства AVRВ АЛУ выполняются все вычислительные операции. Операции
производятся только над содержимым РОН. На выборку содержимого
регистров, выполнение операции и запись результата обратно в РОН
затрачивается один машинный такт (один период тактовой частоты).
Регистры общего назначения представляют собой 8-разрядные
ячейки памяти с быстрым доступом, непосредственно доступные АЛУ. В
AVR-микро-контроллерах имеется 32 РОН.
Программный счётчик (Program Counter – PC) содержит адрес
следующей выполняемой команды.
Указатель стека (Stack Pointer – SP) служит для хранения адреса
вершины стека.
Регистр состояния (Status Register – SREG) содержит слово состояния
процессора.
Регистр команд, дешифратор команд и схема управления
выполнением команд обеспечивают выборку из памяти программ
команды, адрес которой содержится в программном счётчике, её
декодирование, определение способа доступа к указанным в команде
аргументам и собственно выполнение команды.
17.
Архитектура контроллеров семейства AVRПамять AVR-микроконтроллеров организована по схеме гарвардского
типа – адресные пространства памяти программ и памяти данных
разделены.
Память программ представляет собой перепрограммируемое ПЗУ типа
FLASH и выполнена в виде последовательности 16-разрядных ячеек, так
как большинство команд AVR-микроконтроллера являются 16разрядными словами.
Оперативная память данных представляет собой статическое ОЗУ
(SRAM – Static Random-Access Memory) и организована как
последовательность 8-разрядных ячеек. Оперативная память данных
может быть внутренней (до 16 Kбайт) и внешней (до 64 Кбайт).
Энергонезависимая (nonvolatile) память данных организована как
последовательность 8-разрядных ячеек и представляет собой перепрограммируемое ПЗУ с электрическим стиранием (РПЗУ-ЭС, или EEPROM –
Electrically Erasable Programmable Read-only Memory). Энергонезависимая
память данных имеет размер до 64 Кбайт.
Регистры ввода-вывода предназначены для управления процессорным ядром и периферийными устройствами AVR-микроконтроллера.
Схема прерываний обеспечивает возможность асинхронного прерывания процесса выполнения программы при определённых условиях.
18.
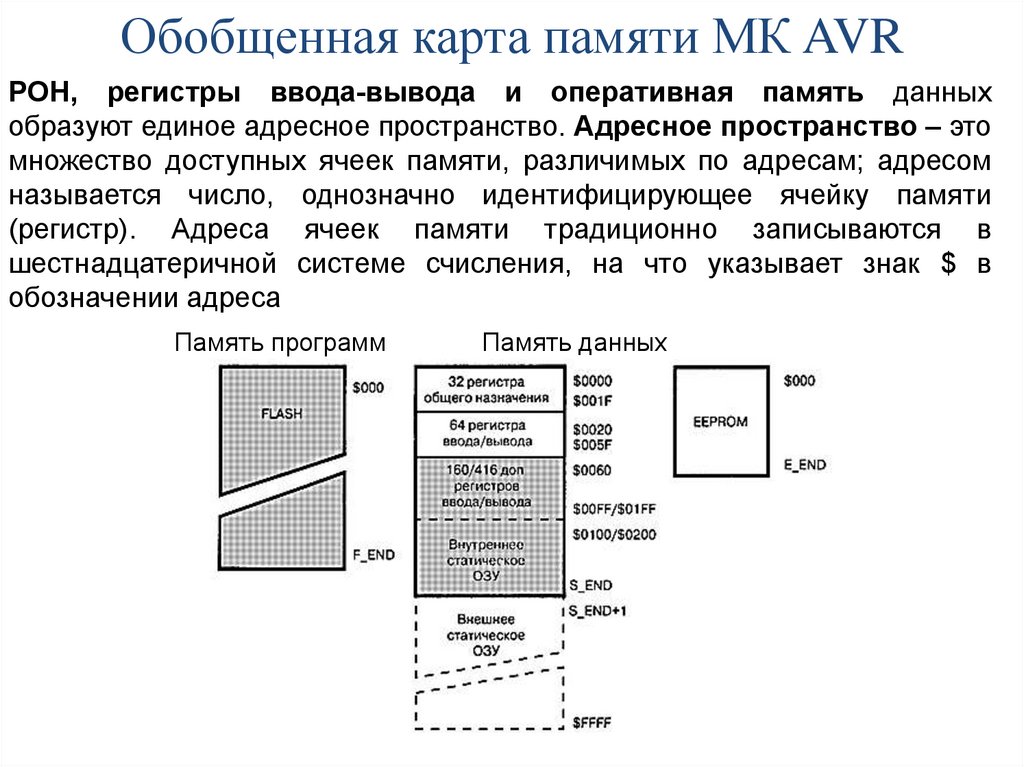
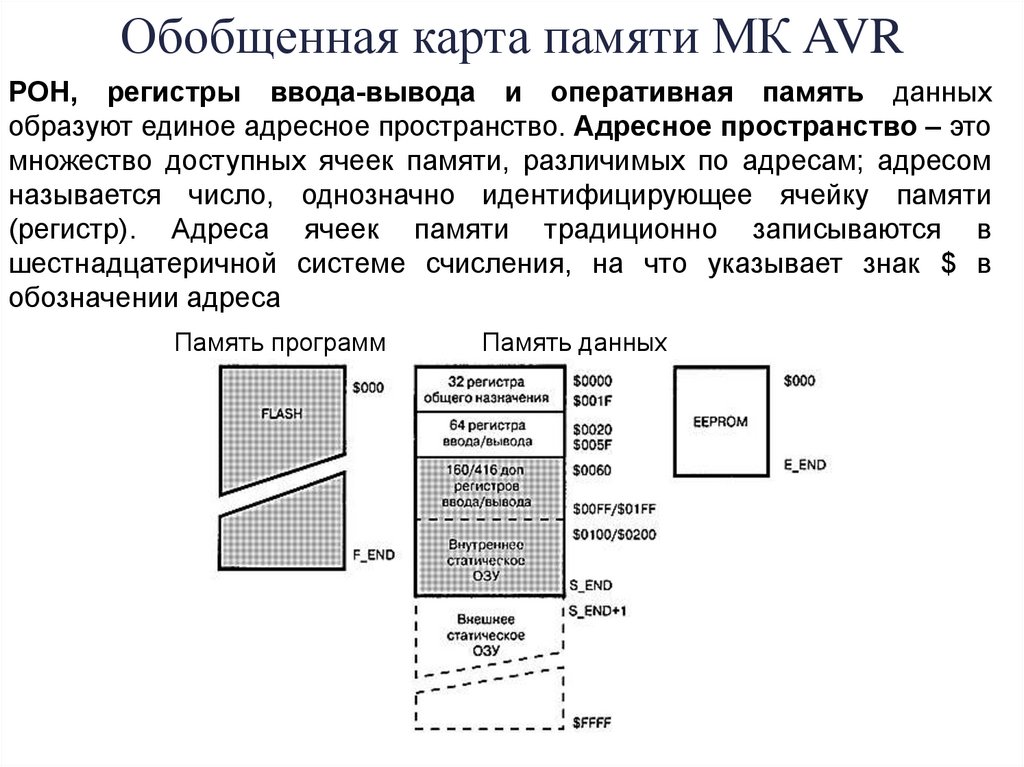
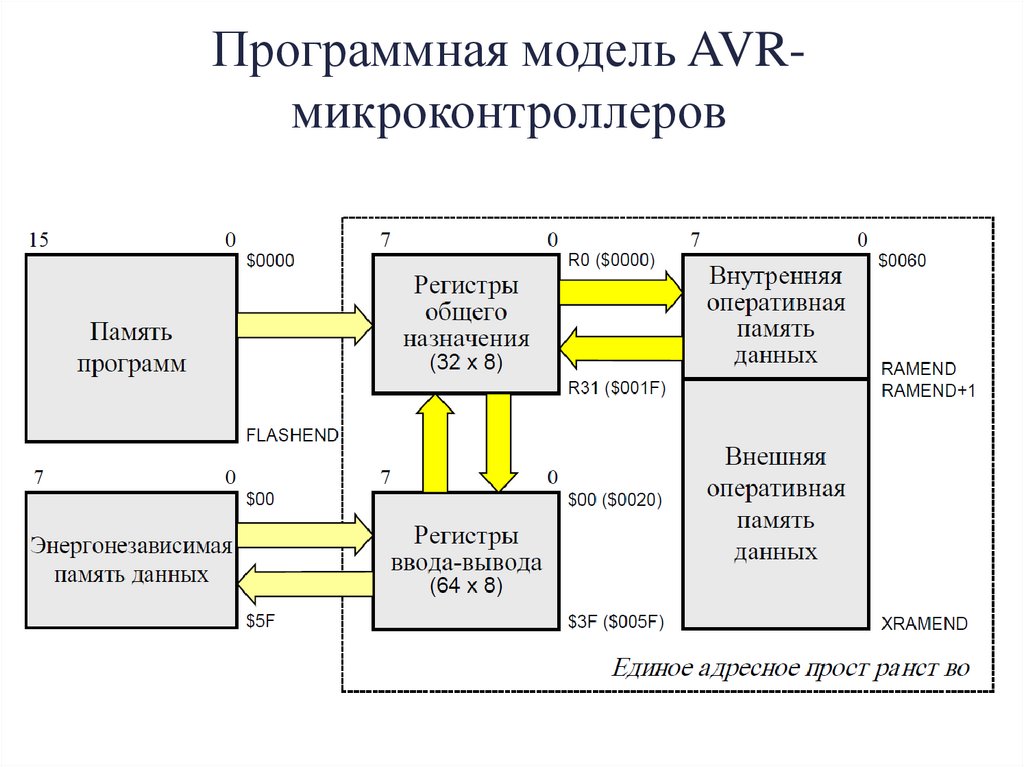
Обобщенная карта памяти МК AVRРОН, регистры ввода-вывода и оперативная память данных
образуют единое адресное пространство. Адресное пространство – это
множество доступных ячеек памяти, различимых по адресам; адресом
называется число, однозначно идентифицирующее ячейку памяти
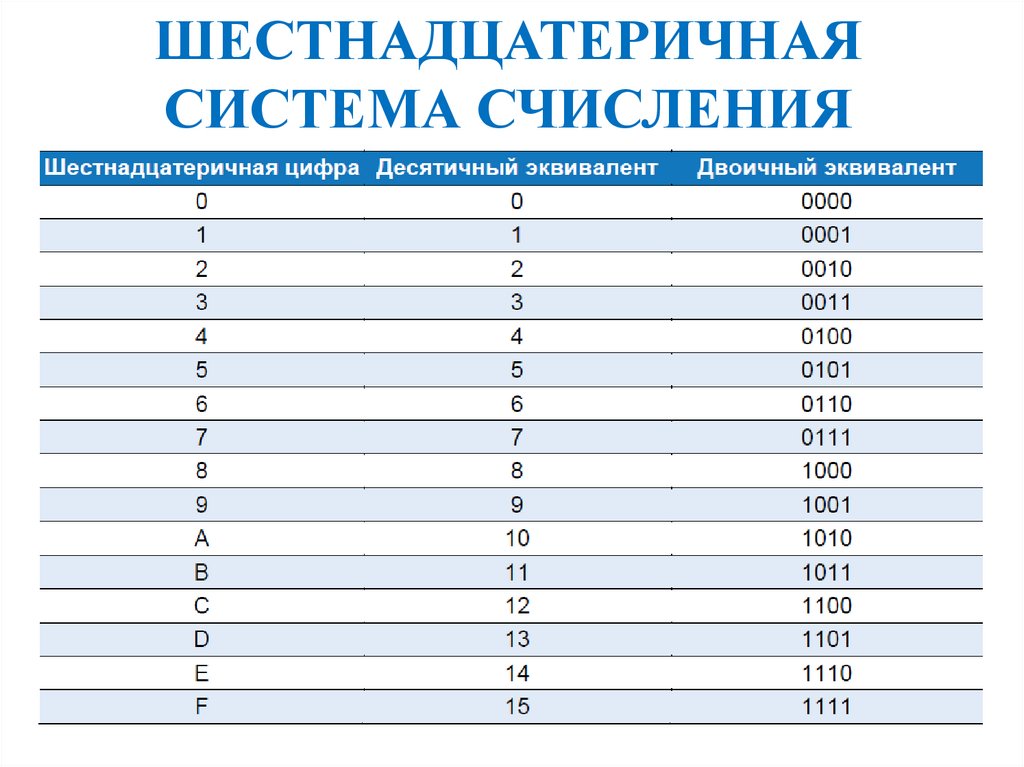
(регистр). Адреса ячеек памяти традиционно записываются в
шестнадцатеричной системе счисления, на что указывает знак $ в
обозначении адреса
Память программ
Память данных
19.
Память данныхПамять данных предназначена для записи/чтения данных. Является
энергозависимой, то есть, при отключении питания микроконтроллера все
хранимые в ней данные, будут потеряны. Начальный адрес SRAM – 0x100, а
верхний адрес – разный в различных устройствах.
Память программ
Память программ реализована по технологии Flash–EPROM, является
энергонезависимой, подразумевает программирование пользователем и cтирание
электрическим способом. Размер этой памяти варьируется в зависимости от
микроконтроллера и обычно составляет несколько Кбайт командных слов.
Адресация команд в памяти программ реализуется с помощью специального
регистра – счетчика команд, разрядность которого определяет допустимый размер
этой памяти. Для программирования необходим программатор.
Память EEPROM микроконтроллеров AVR
Встроенная
память
EEPROM
–
электрически
перезаписываемая
энергонезависимая память, медленнодействующая и имеет ограниченный цикл
перезаписи.
Память EEPROM используют для хранения данных, которые не должны быть
потеряны даже при потере питания. Запись/чтение памяти EEPROM доступна
программно и допускает побайтную передачу данных с помощью регистра
управления EECR, регистра данных EEDR и регистровой пары EEARL, EEARH,
определяющей адрес ячейки памяти
20.
Регистры общего назначения (РОН)РОН
(R0…R31)
могут
использоваться в программе для
хранения данных, адресов, констант и
другой информации. Шесть старших
регистров объединены попарно и
составляют
три
16-разрядных
регистра Х [R27:R26], Y [R29:R28] и Z
[R31:R30]
В микроконтроллерах AVR она
состоит из 32 восьмиразрядных
регистров (диапазон адресов 0x000 –
0x01F).
В программах, написанных на
языке
С,
непосредственное
обращение к регистрам общего
назначения обычно не требуется.
21.
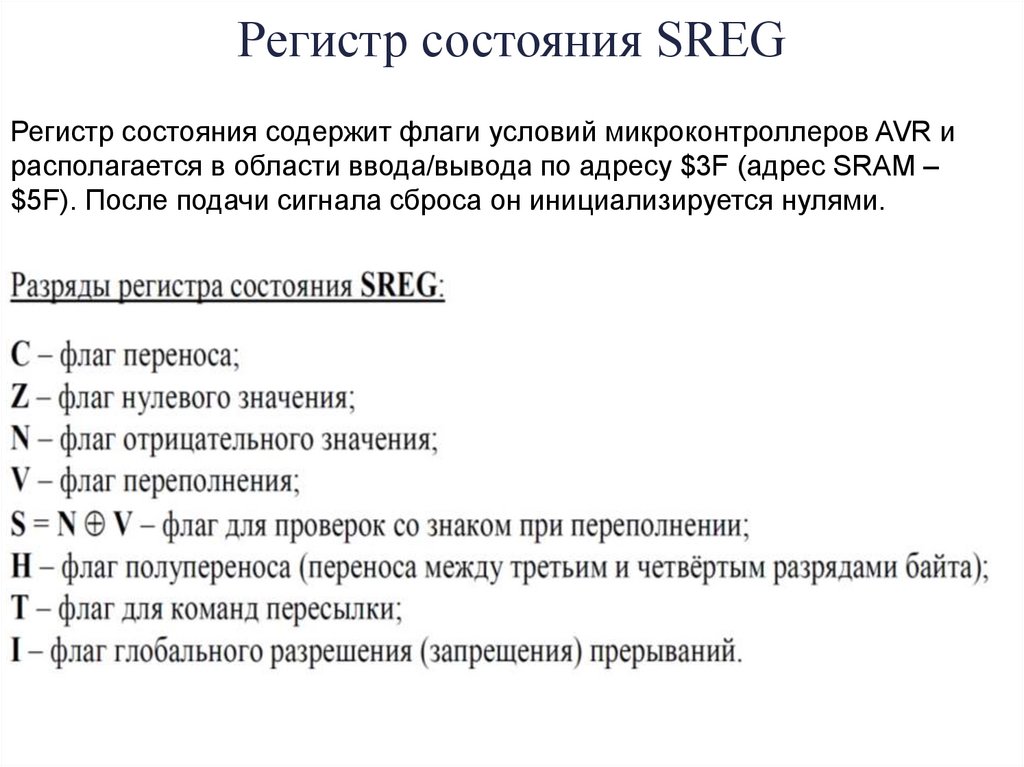
Регистр состояния SREGРегистр состояния содержит флаги условий микроконтроллеров AVR и
располагается в области ввода/вывода по адресу $3F (адрес SRAM –
$5F). После подачи сигнала сброса он инициализируется нулями.
22.
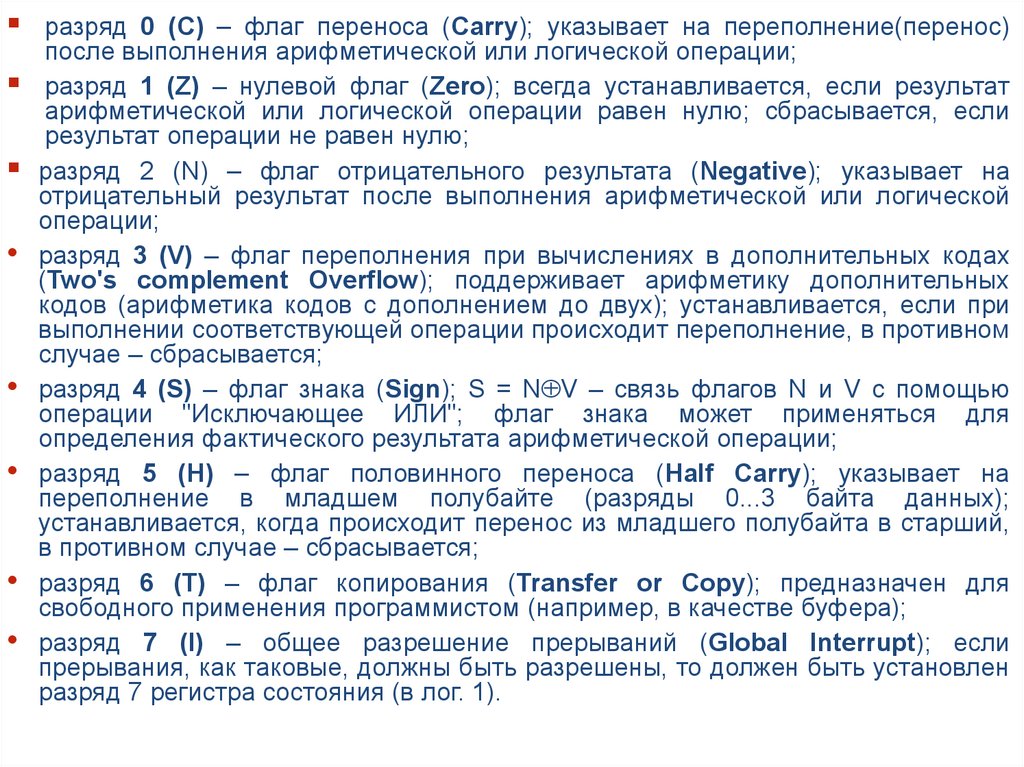
разряд 0 (С) – флаг переноса (Carry); указывает на переполнение(перенос)после выполнения арифметической или логической операции;
разряд 1 (Z) – нулевой флаг (Zero); всегда устанавливается, если результат
арифметической или логической операции равен нулю; сбрасывается, если
результат операции не равен нулю;
разряд 2 (N) – флаг отрицательного результата (Negative); указывает на
отрицательный результат после выполнения арифметической или логической
операции;
• разряд 3 (V) – флаг переполнения при вычислениях в дополнительных кодах
(Two's complement Overflow); поддерживает арифметику дополнительных
кодов (арифметика кодов с дополнением до двух); устанавливается, если при
выполнении соответствующей операции происходит переполнение, в противном
случае – сбрасывается;
• разряд 4 (S) – флаг знака (Sign); S = N V – связь флагов N и V с помощью
операции "Исключающее ИЛИ"; флаг знака может применяться для
определения фактического результата арифметической операции;
• разряд 5 (Н) – флаг половинного переноса (Half Carry); указывает на
переполнение в младшем полубайте (разряды 0...3 байта данных);
устанавливается, когда происходит перенос из младшего полубайта в старший,
в противном случае – сбрасывается;
• разряд 6 (Т) – флаг копирования (Transfer or Copy); предназначен для
свободного применения программистом (например, в качестве буфера);
• разряд 7 (I) – общее разрешение прерываний (Global Interrupt); если
прерывания, как таковые, должны быть разрешены, то должен быть установлен
разряд 7 регистра состояния (в лог. 1).
23.
СтекСтек – это особая область памяти данных, используемая
процессором для временного хранения адресов возврата из подпрограмм,
промежуточных результатов вычислений и др. Для микроконтроллеров
AVR компиляторы языка С (например, при обращении к подпрограммам)
могут также создавать один или более стеков программно, начиная с
верхних адресов области SRAM.
Стек действует по принципу LIFO – "Last In, First Out", что означает
"последним вошел, первым вышел". Это означает, что новые данные
вначале помещаются на вершину (первый уровень) стека, а затем, с
поступлением следующих данных, "проталкиваются" на его нижние
уровни. Извлечение из стека происходит в обратном порядке: вначале
считываются данные, помещенные последними на вершину, после чего
данные, размещенные на нижних уровнях, как бы "выталкиваются" на один
уровень вверх.
Ячейка памяти, которая является в данный момент вершиной
стека, адресуется указателем стека (для AVR – регистровой парой SPL,
SPH).
24.
Архитектура контроллеров семейства AVRК периферийным устройствам AVR-микроконтроллера относятся:
1. Порты ввода-вывода (I/O).
2. Таймеры (TIMERS).
3. Счётчики (COUNTERS).
4. Сторожевой таймер (WDT).
5. Аналоговый компаратор (AC).
6. Аналого-цифровой преобразователь (A/D CONVERTER, ADC).
7. Универсальный асинхронный (синхронно-асинхронный)
приёмопередатчик – УАПП (УСАПП) (UART или USART),
8. Последовательный периферийный интерфейс SPI.
9. Двухпроводной последовательный интерфейс I2C.
25.
Порты ввода-выводаВсе периферийные устройства адресуются через регистры
ввода-вывода (, IO registers). В архитектуре АVR, как и в других
архитектурах МК, термин «порты ввода-вывода» обозначает
параллельные порты для обмена данными с внешними устройствами.
Портов ввода-вывода в разных моделях может быть от 1 до 7.
Номинально порты 8-разрядные.
Для сокращения числа контактов корпуса в подавляющем
большинстве случаев внешние выводы, соответствующие портам,
кроме своей основной функции (двунаправленного ввода-вывода) несут
также и дополнительную, переключаются программным способом.
Выводы портов в достаточной степени автономны, и их режим может
устанавливаться независимо друг от друга. По умолчанию при
включении питания все дополнительные устройства отключены, а порты
работают на вход, причем находятся в состоянии с высоким
импедансом.
26.
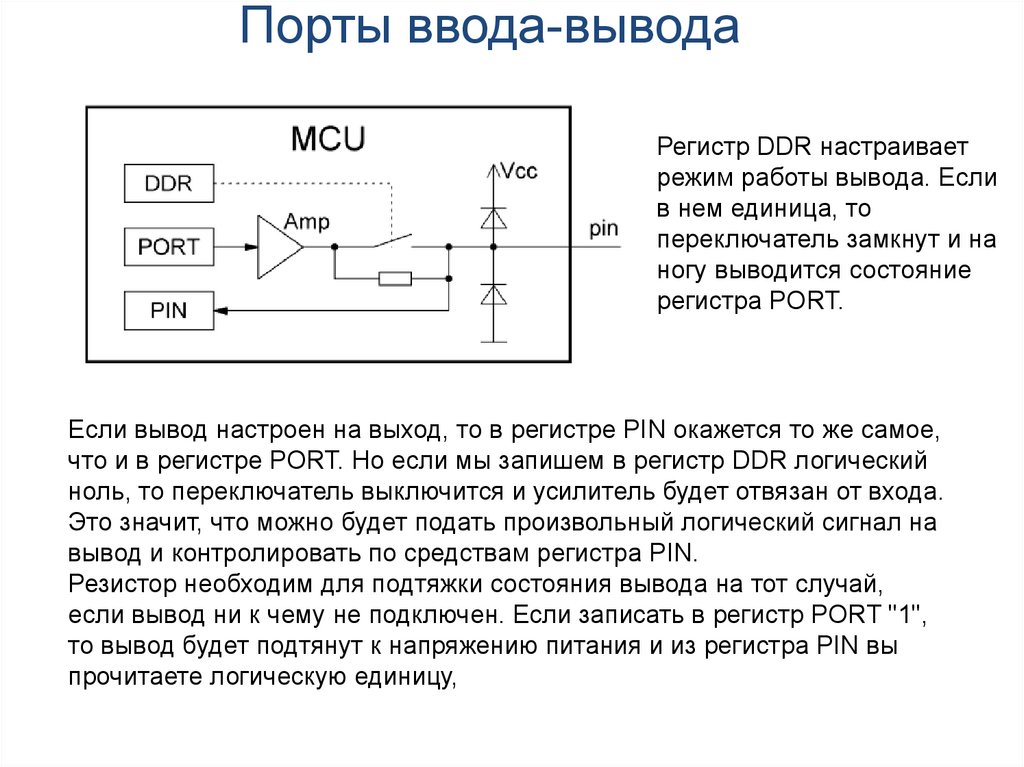
Порты ввода-выводаРегистр DDR настраивает
режим работы вывода. Если
в нем единица, то
переключатель замкнут и на
ногу выводится состояние
регистра PORT.
Если вывод настроен на выход, то в регистре PIN окажется то же самое,
что и в регистре PORT. Но если мы запишем в регистр DDR логический
ноль, то переключатель выключится и усилитель будет отвязан от входа.
Это значит, что можно будет подать произвольный логический сигнал на
вывод и контролировать по средствам регистра PIN.
Резистор необходим для подтяжки состояния вывода на тот случай,
если вывод ни к чему не подключен. Если записать в регистр PORT "1",
то вывод будет подтянут к напряжению питания и из регистра PIN вы
прочитаете логическую единицу,
27.
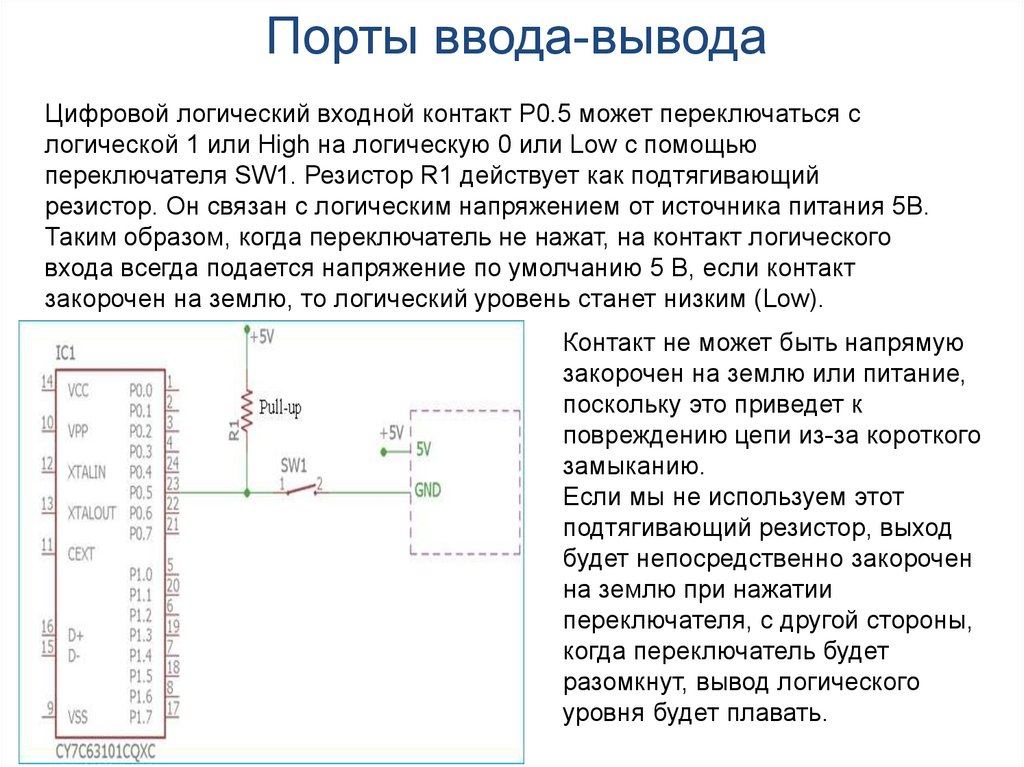
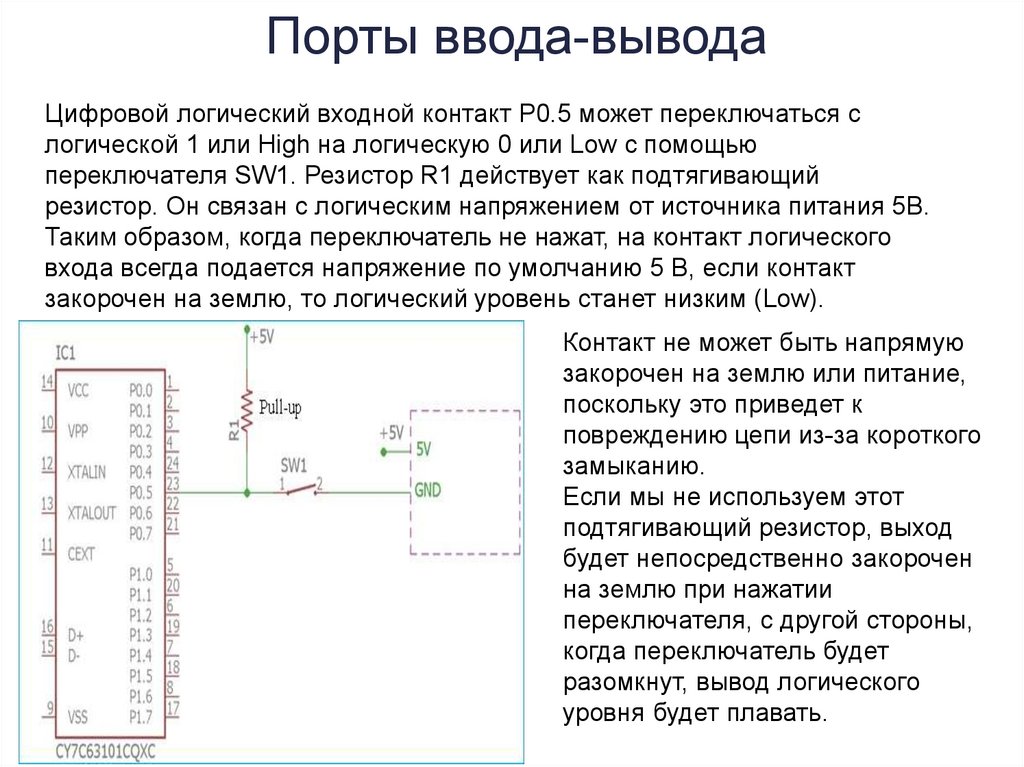
Порты ввода-выводаЦифровой логический входной контакт P0.5 может переключаться с
логической 1 или High на логическую 0 или Low с помощью
переключателя SW1. Резистор R1 действует как подтягивающий
резистор. Он связан с логическим напряжением от источника питания 5В.
Таким образом, когда переключатель не нажат, на контакт логического
входа всегда подается напряжение по умолчанию 5 В, если контакт
закорочен на землю, то логический уровень станет низким (Low).
Контакт не может быть напрямую
закорочен на землю или питание,
поскольку это приведет к
повреждению цепи из-за короткого
замыканию.
Если мы не используем этот
подтягивающий резистор, выход
будет непосредственно закорочен
на землю при нажатии
переключателя, с другой стороны,
когда переключатель будет
разомкнут, вывод логического
уровня будет плавать.
28.
Таймеры-счетчикиСчетчики предназначены для подсчета импульсов,
поступающих на отдельные входы.
Таймеры предназначены для формирования импульсов
заданной длины.
При переполнении счетчика возникает событие, которое может
вызывать соответствующее прерывание. 8-разрядный счетчик Timer0 в
большинстве случаев этой функцией и ограничивается. Счетчик Timer2,
если он имеется, может также вызывать прерывание по совпадению
подсчитанного значения с некоторой заранее заданной
величиной. 16-разрядные счетчики - более «продвинутая» штука, и
могут вызывать прерывания по совпадению с двумя независимо
заданными .числами А и В. При этом счетчики могут обнуляться или
продолжать счет, а на специальных выводах- генерироваться импульсы
(аппаратно, без участия программы).
Все счетчики-таймеры допускают работу в так называемых
режимах РWМ (ШИМ).
Кроме таймеров-счетчиков, во всех без исключения АVRконтроллерах есть сторожевой (WatchDog) таймер. Он предназначен в
основном для вывода МК из режима энергосбережения через
определенный интервал времени, но может служить и для аварийного
перезапуска МК.
29.
Таймеры-счетчикиВ принципе таймер это простой счетчик. Его достоинство в том, что он может
считать импульсы входной частоты и работать независимо от основного потока
выполнения программы. Строго заданная частота тактирования делает
возможным измерять интервалы времени в единицах периода тактов таймера.
Почему существуют разные таймеры? Ответ очень прост: для создания
подходящего таймера для разных задач нужны некоторые разные (аппаратные)
ресурсы.
Обычно в микроконтроллерах серий 90S, megaAVR и tinyAVR имеется два 8битных таймера и один 16-битный. Таймер, у которого 16-битное разрешение,
обычно более гибок в настройке и обладает расширенным функционалом в
сравнении с 8-битным таймером. Однако правило "чем больше тем лучше" не
всегда справедливо для мира микроконтроллеров, когда нужно решить
узкоспециализированную задачу. Для многих приложений достаточно 8разрядной разрешающей способности. Использование разрядности выше
означает увеличение затрат на вычисления, увеличение времени обработки, и
этого нужно пытаться избегать путем оптимизации кода по скорости. Это также
означает, что нужно применять более дорогой микроконтроллер. Гибкость
таймеров AVR позволяет приспособить их для решения различных задач.
Количество таймеров определяет количество различных конфигураций.
30.
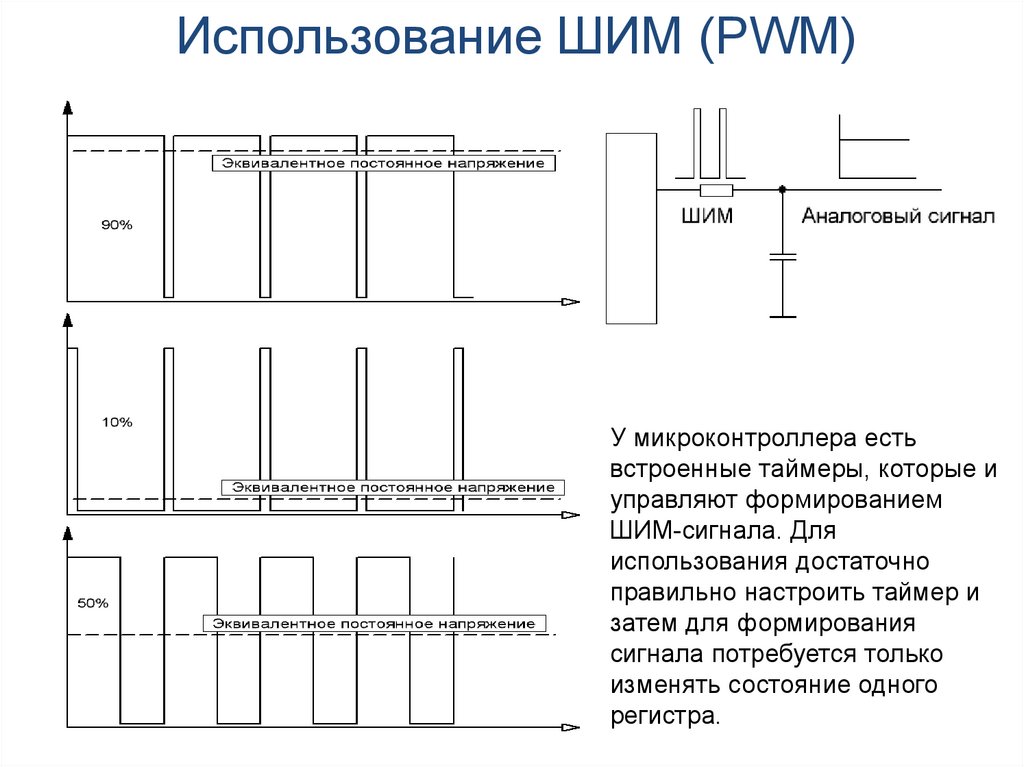
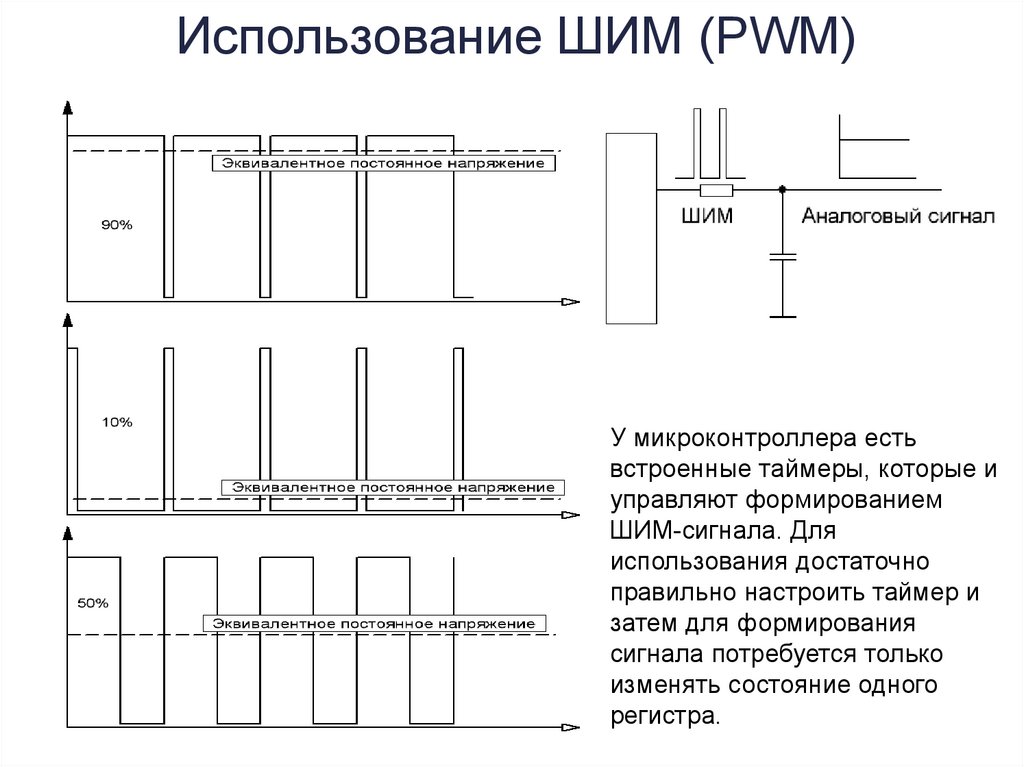
Использование ШИМ (PWM)У микроконтроллера есть
встроенные таймеры, которые и
управляют формированием
ШИМ-сигнала. Для
использования достаточно
правильно настроить таймер и
затем для формирования
сигнала потребуется только
изменять состояние одного
регистра.
31.
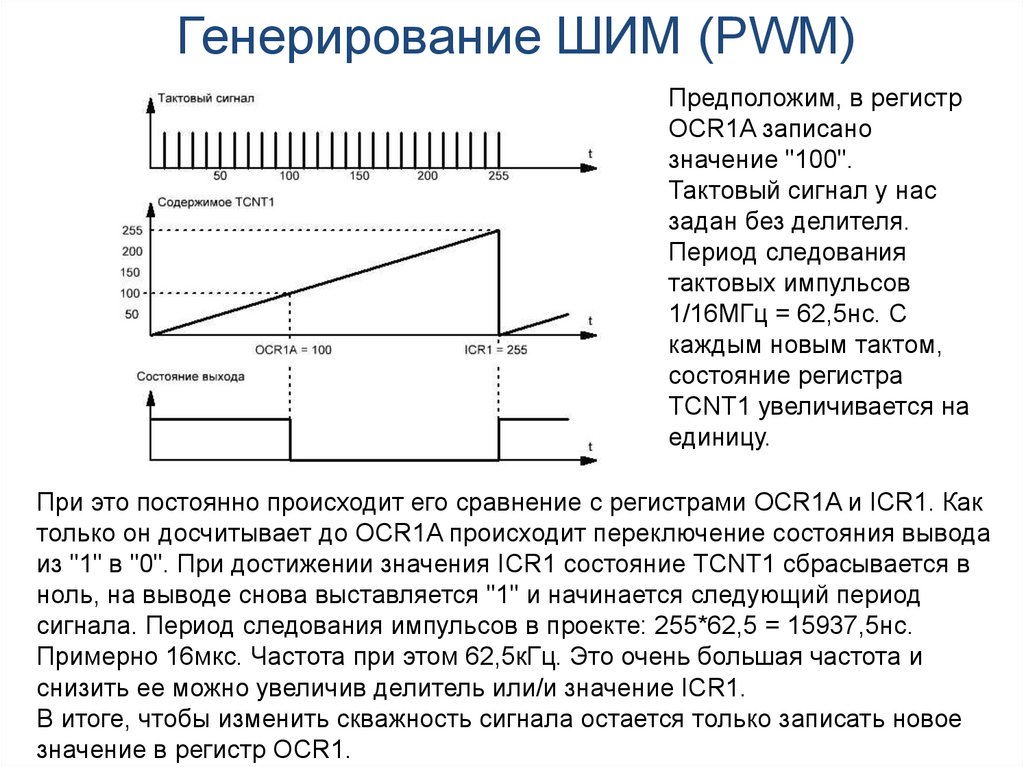
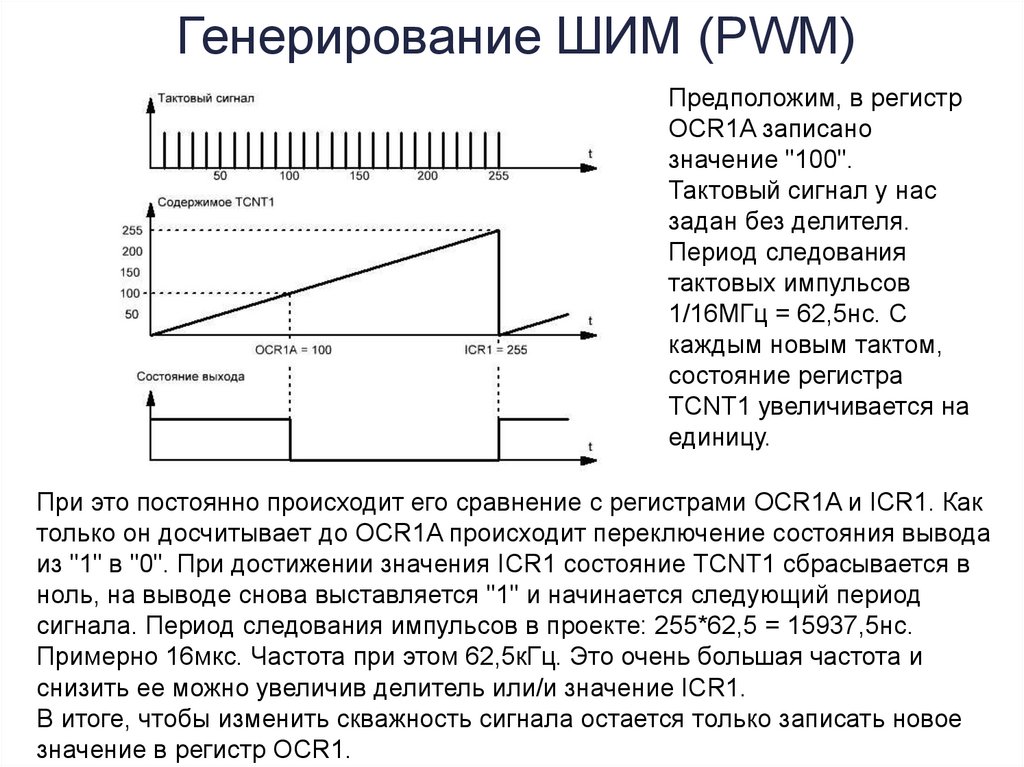
Генерирование ШИМ (PWM)Предположим, в регистр
OCR1A записано
значение "100".
Тактовый сигнал у нас
задан без делителя.
Период следования
тактовых импульсов
1/16МГц = 62,5нс. С
каждым новым тактом,
состояние регистра
TCNT1 увеличивается на
единицу.
При это постоянно происходит его сравнение с регистрами OCR1A и ICR1. Как
только он досчитывает до OCR1A происходит переключение состояния вывода
из "1" в "0". При достижении значения ICR1 состояние TCNT1 сбрасывается в
ноль, на выводе снова выставляется "1" и начинается следующий период
сигнала. Период следования импульсов в проекте: 255*62,5 = 15937,5нс.
Примерно 16мкс. Частота при этом 62,5кГц. Это очень большая частота и
снизить ее можно увеличив делитель или/и значение ICR1.
В итоге, чтобы изменить скважность сигнала остается только записать новое
значение в регистр OCR1.
32.
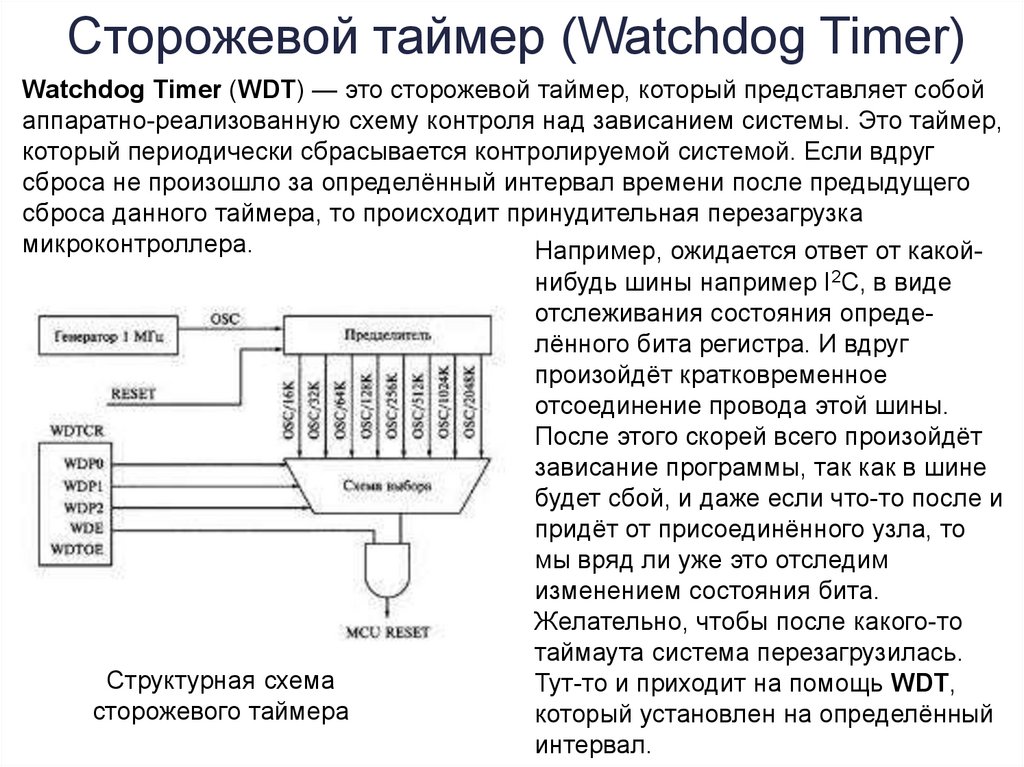
Сторожевой таймер (Watchdog Timer)Watchdog Timer (WDT) — это сторожевой таймер, который представляет собой
аппаратно-реализованную схему контроля над зависанием системы. Это таймер,
который периодически сбрасывается контролируемой системой. Если вдруг
сброса не произошло за определённый интервал времени после предыдущего
сброса данного таймера, то происходит принудительная перезагрузка
микроконтроллера.
Например, ожидается ответ от какойнибудь шины например I2C, в виде
отслеживания состояния определённого бита регистра. И вдруг
произойдёт кратковременное
отсоединение провода этой шины.
После этого скорей всего произойдёт
зависание программы, так как в шине
будет сбой, и даже если что-то после и
придёт от присоединённого узла, то
мы вряд ли уже это отследим
изменением состояния бита.
Желательно, чтобы после какого-то
таймаута система перезагрузилась.
Структурная схема
Тут-то и приходит на помощь WDT,
сторожевого таймера
который установлен на определённый
интервал.
33.
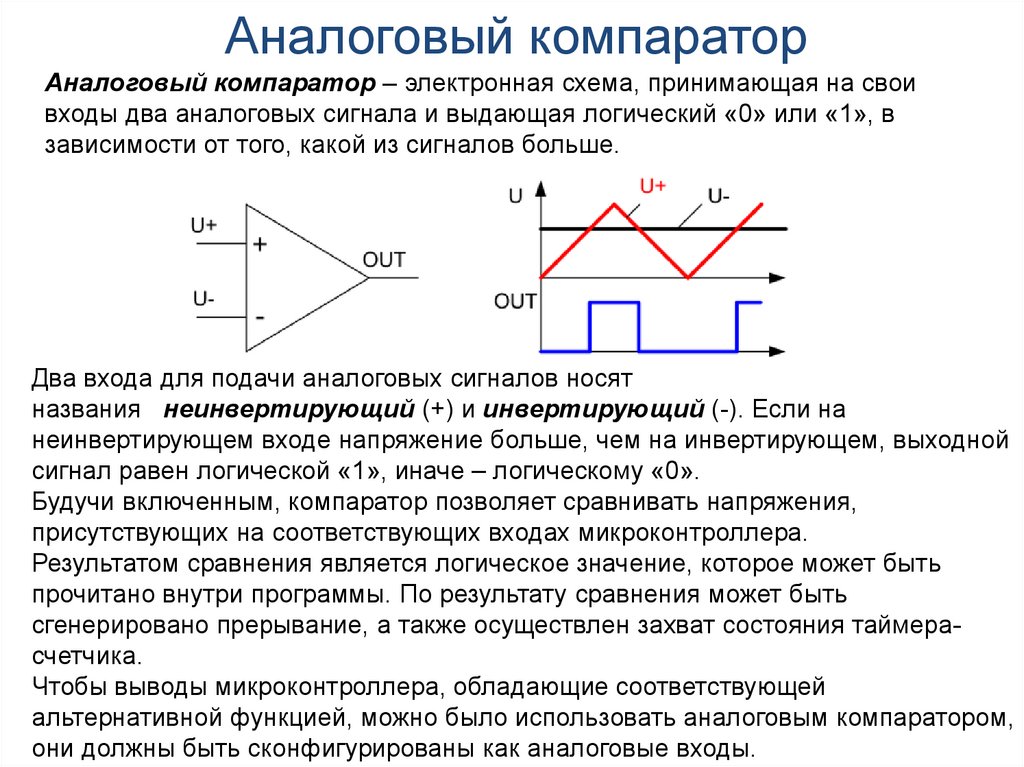
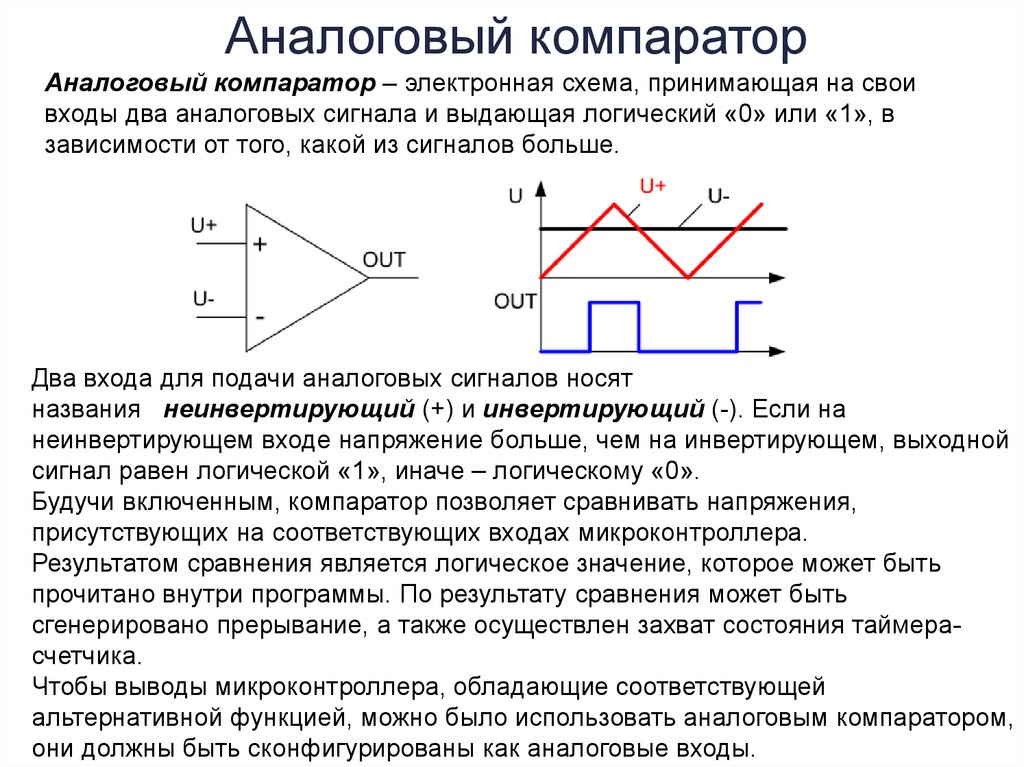
Аналоговый компараторАналоговый компаратор – электронная схема, принимающая на свои
входы два аналоговых сигнала и выдающая логический «0» или «1», в
зависимости от того, какой из сигналов больше.
Два входа для подачи аналоговых сигналов носят
названия неинвертирующий (+) и инвертирующий (-). Если на
неинвертирующем входе напряжение больше, чем на инвертирующем, выходной
сигнал равен логической «1», иначе – логическому «0».
Будучи включенным, компаратор позволяет сравнивать напряжения,
присутствующих на соответствующих входах микроконтроллера.
Результатом сравнения является логическое значение, которое может быть
прочитано внутри программы. По результату сравнения может быть
сгенерировано прерывание, а также осуществлен захват состояния таймерасчетчика.
Чтобы выводы микроконтроллера, обладающие соответствующей
альтернативной функцией, можно было использовать аналоговым компаратором,
они должны быть сконфигурированы как аналоговые входы.
34.
Аналого-цифровой преобразовательАналого-цифровой преобразователь (АЦП) – это
устройство, преобразующее входной аналоговый сигнал в
дискретный код (цифровой сигнал).
В качестве аналогового сигнала может выступать любая
физическая непрерывно меняющаяся величина. Чаще
всего в качестве входного сигнала используется
эквивалентный сигнал напряжения для получения
цифровой информации о температуре, токе, влажности.
Большинство аналого-цифровых преобразователей
являются линейными, то есть диапазон входных значений,
отображаемый на выходное цифровое значение, связан по
линейному закону с этим выходным значением. Основой
построения АЦП является аналоговый компаратор.
Разрешение АЦП – минимальное изменение
величины аналогового сигнала, которое может быть
преобразовано данным АЦП. Обычно измеряется в
вольтах.
35.
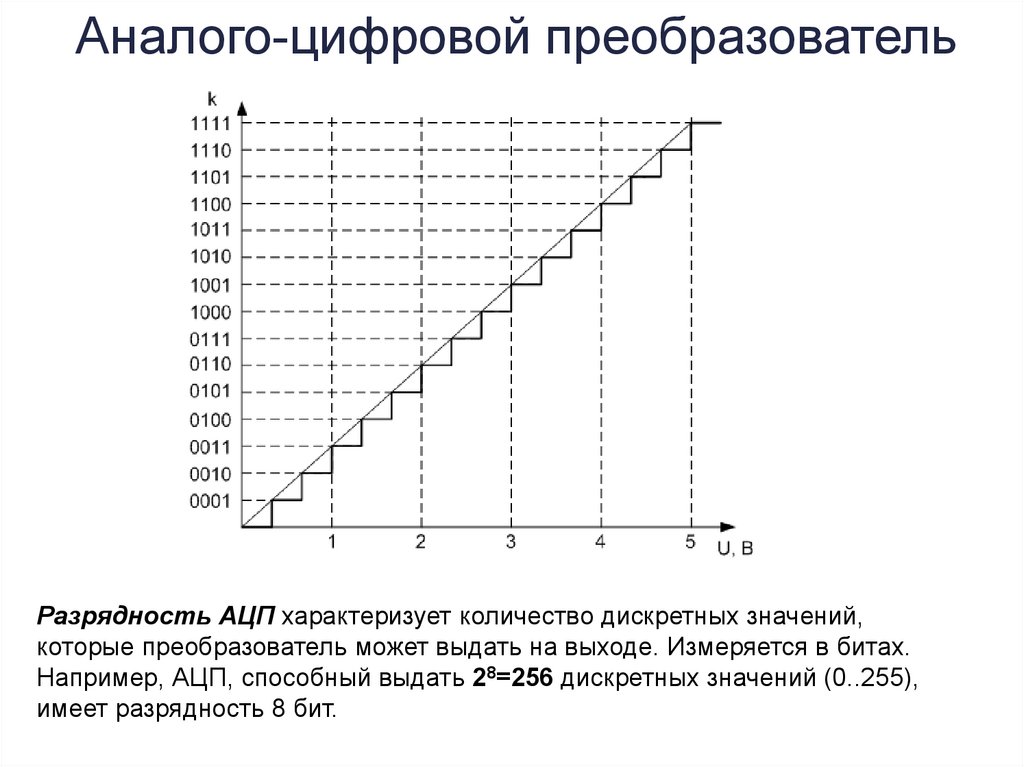
Аналого-цифровой преобразовательРазрядность АЦП характеризует количество дискретных значений,
которые преобразователь может выдать на выходе. Измеряется в битах.
Например, АЦП, способный выдать 28=256 дискретных значений (0..255),
имеет разрядность 8 бит.
36.
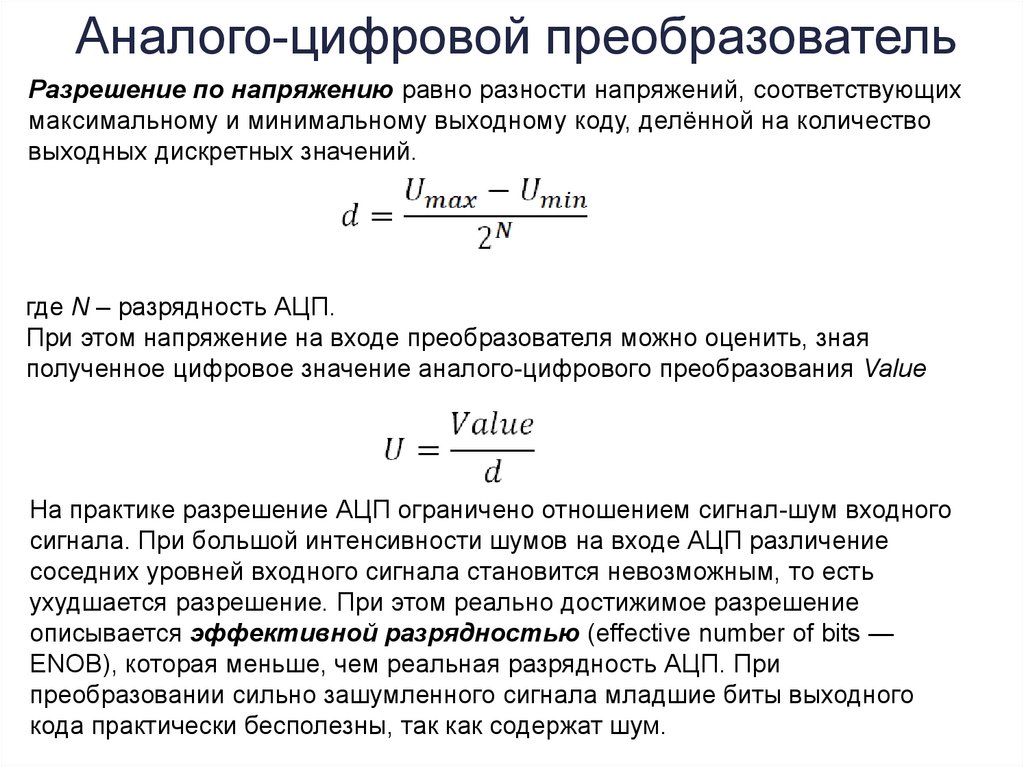
Аналого-цифровой преобразовательРазрешение по напряжению равно разности напряжений, соответствующих
максимальному и минимальному выходному коду, делённой на количество
выходных дискретных значений.
где N – разрядность АЦП.
При этом напряжение на входе преобразователя можно оценить, зная
полученное цифровое значение аналого-цифрового преобразования Value
На практике разрешение АЦП ограничено отношением сигнал-шум входного
сигнала. При большой интенсивности шумов на входе АЦП различение
соседних уровней входного сигнала становится невозможным, то есть
ухудшается разрешение. При этом реально достижимое разрешение
описывается эффективной разрядностью (effective number of bits —
ENOB), которая меньше, чем реальная разрядность АЦП. При
преобразовании сильно зашумленного сигнала младшие биты выходного
кода практически бесполезны, так как содержат шум.
37.
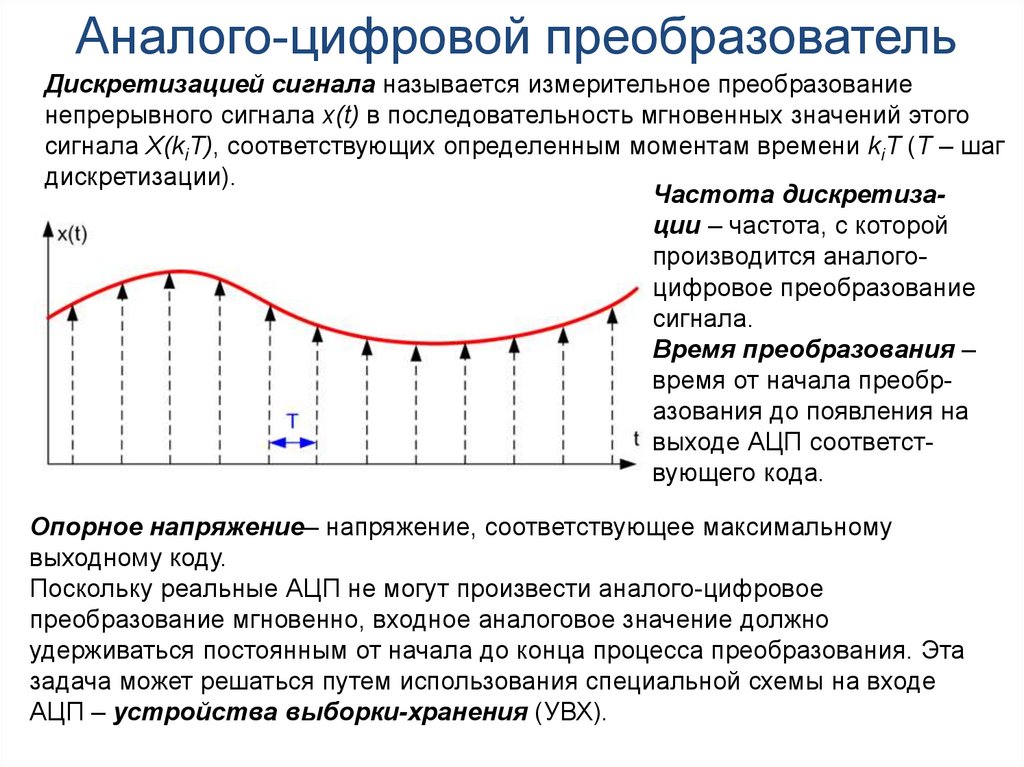
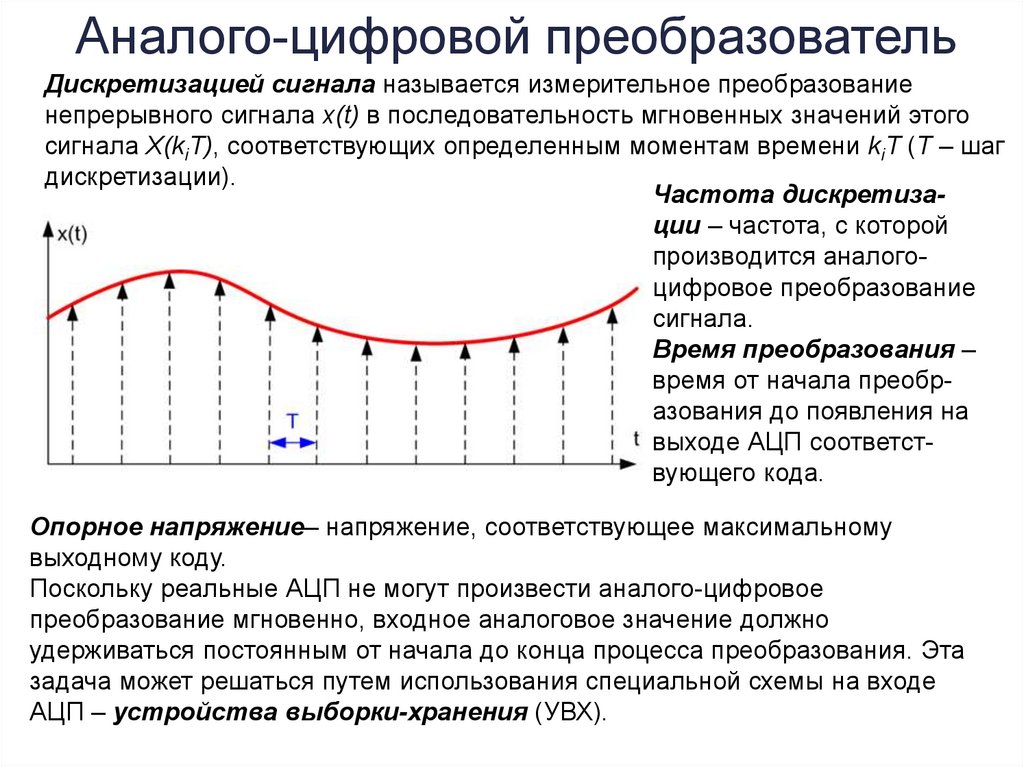
Аналого-цифровой преобразовательДискретизацией сигнала называется измерительное преобразование
непрерывного сигнала x(t) в последовательность мгновенных значений этого
сигнала X(kiT), соответствующих определенным моментам времени kiT (T – шаг
дискретизации).
Частота дискретизации – частота, с которой
производится аналогоцифровое преобразование
сигнала.
Время преобразования –
время от начала преобразования до появления на
выходе АЦП соответствующего кода.
Опорное напряжение– напряжение, соответствующее максимальному
выходному коду.
Поскольку реальные АЦП не могут произвести аналого-цифровое
преобразование мгновенно, входное аналоговое значение должно
удерживаться постоянным от начала до конца процесса преобразования. Эта
задача может решаться путем использования специальной схемы на входе
АЦП – устройства выборки-хранения (УВХ).
38.
Аналого-цифровой преобразовательАЦП входит во многие современные модели МК
АVR, и в том числе может использоваться для замены
функций более простого в обращении, но менее
функционального аналогового компаратора. АЦП в
АVR - многоканальный.
Разрешающая способность АЦП в МК АVR - 10
двоичных разрядов, чего для большинства типовых
применений достаточно (около 0,1% шкалы).
Отметим также, что АЦП может работать в двух
режимах: одиночного и непрерывного
преобразования.
39.
Последовательные портыПоследовательные порты называют так потому,
что в них в каждый момент времени передается
только один бит. Самое главное преимущество
последовательных портов перед параллельными снижение числа соединений.
В микроконтроллерных устройствах с малыми
объемами данных скорость передачи.
Практически любой последовательный порт можно
имитировать программно, используя
обычные выводы МК. Когда-то так и поступали даже в
случае самого популярного из таких портов - UART.
Однако с тех пор МК обзавелись аппаратными
последовательными портами.
40.
UART (Universal Asynchronous Receiver-Transmitter)В компьютерах есть СОМ-порт, часто ошибочно
называемый портом RS-232. Правильно сказать так:
СОМ-порт передает данные, основываясь на
стандарте последовательного интерфейса RS-232.
Последний, кроме собственно протокола
передачи, стандартизирует также и электрические
параметры, и разъемы DB-9 и DB-25. UART основная часть любого устройства, поддерживающего
RS-232, но и не только его - например, стандарты RS485 и RS-422 также реализовываются через UART, т.
к. они отличаются от RS-232 только электрическими
параметрами и допустимыми скоростями.
Кроме UART, в конкретный порт (в том числе в
СОМ-порт ПК) обычно входит схема преобразования
логических уровней в уровни соответствующего
стандарта.
41.
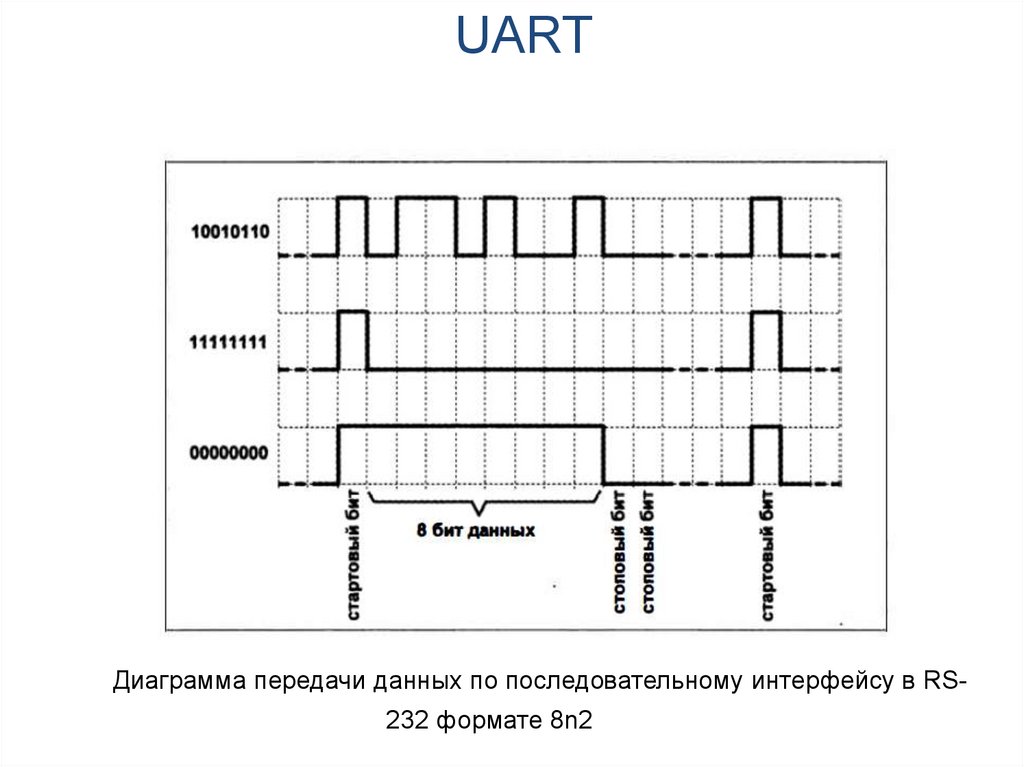
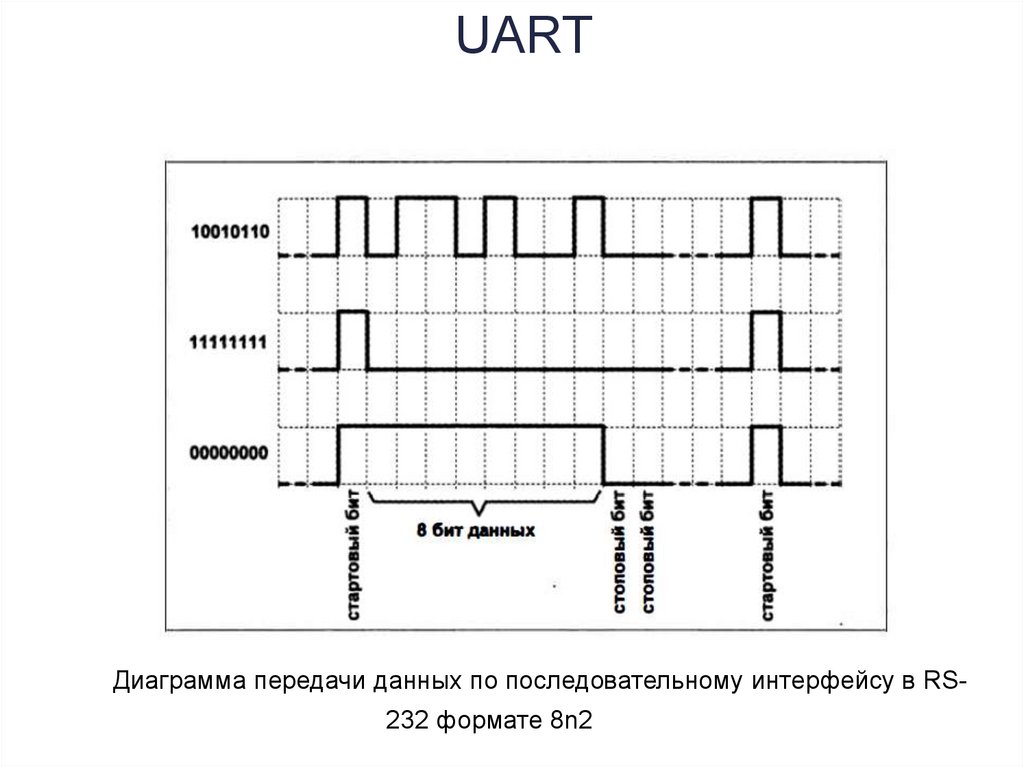
UARTДиаграмма передачи данных по последовательному интерфейсу в RS232 формате 8n2
42.
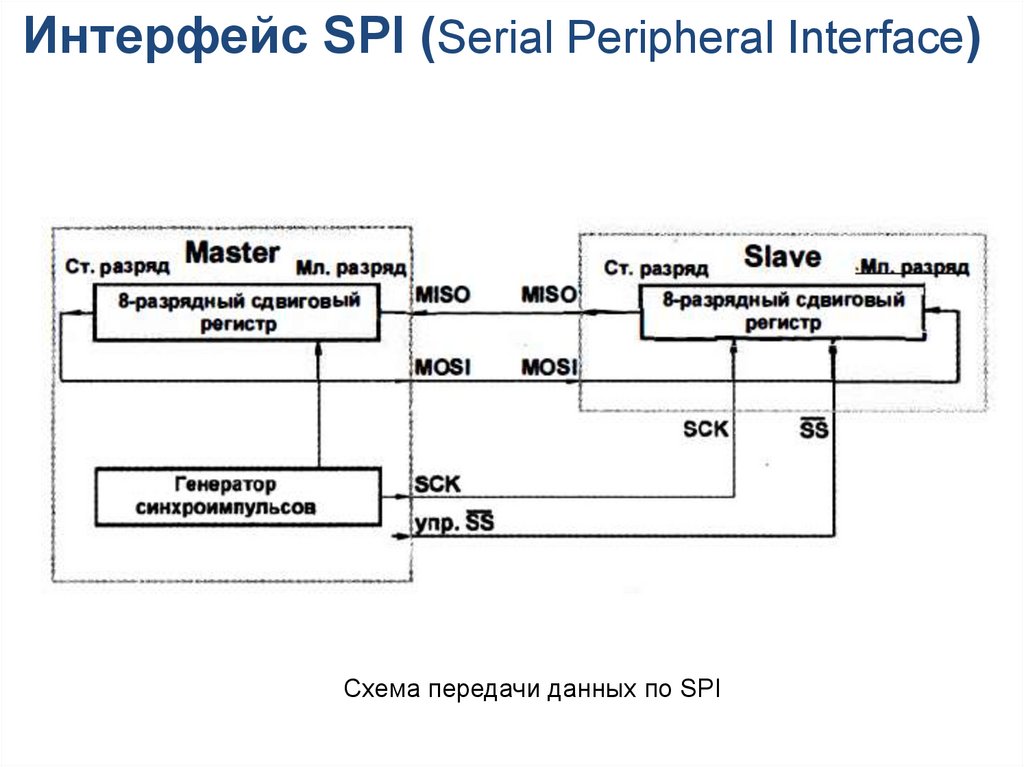
Интерфейс SPI (Serial Peripheral Interface)В интерфейсе SPI синхронизирующие импульсы передают по отдельной,
специально выделенной линии.
Названия линий SPI - информационные линии MISO (Master In Slave Out),
MOSI (Master Out Slave ln) и линия для подачи тактовых импульсов
SCK.
В интерфейсе SPI одноименные выводы MISO и MOSI соединяются
между собой, а направление передачи задается выбором режима «ведущий ведомый.
Четвертый провод в является аналогом «выбора кристалла» и носит
название SS (Slave Select- выбор ведомого).
Никаких стартовых и стоповых битов в SPI не предусматривается, и
если обмен непрерывный, то выделить начало байта, чтобы синхронизировать
чтение/запись, невозможно. Поэтому обычно на время чтения генератор
приостанавливают и заодно подают сигнал высокого уровня на SS (если этот
вывод задействован), чтобы остановить ведомый и привести его в исходное
состояние.
43.
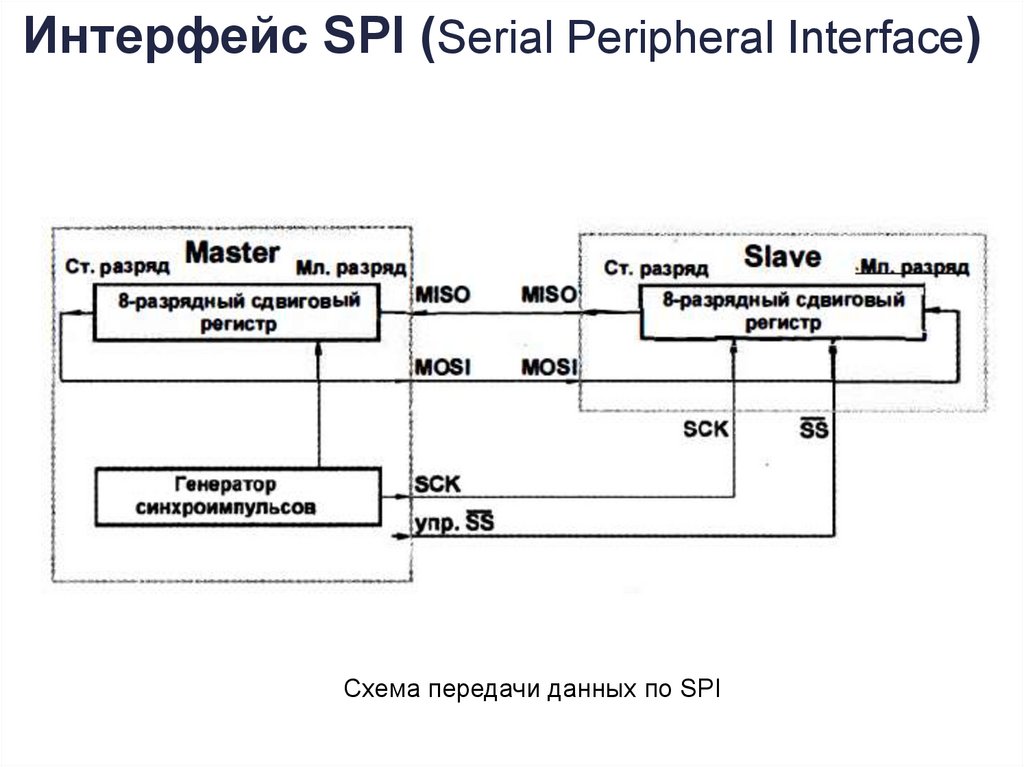
Интерфейс SPI (Serial Peripheral Interface)Схема передачи данных по SPI
44.
Интерфейс ТWI (I2С)Интерфейс I2C, требует двухпроводного соединения, но с
обязательным объединением «земель».
В интерфейсе I2С устройства могут работать в режиме
«ведущий» (Master) или «ведомый» (Slave).
В отличие от большинства других интерфейсов, ведомые
устройства с интерфейсом I2C должны иметь индивидуальный
адрес, присваиваемый производителем.
I2С, как и SPI, как правило, служит для связи между собой
микросхем на одной плате или в пределах одного устройства.
Однако это значительно более медленный интерфейс (типовое
значение скорости обмена- 100 кбит/с), и потому применяется там,
где не требуется скоростной передачи данных.
Существуют устройства (например, датчики температуры
фирмы Dallas Semiconductor, которые способны работать без
питания, получая его от сигнальных линий интерфейса I2С.
45.
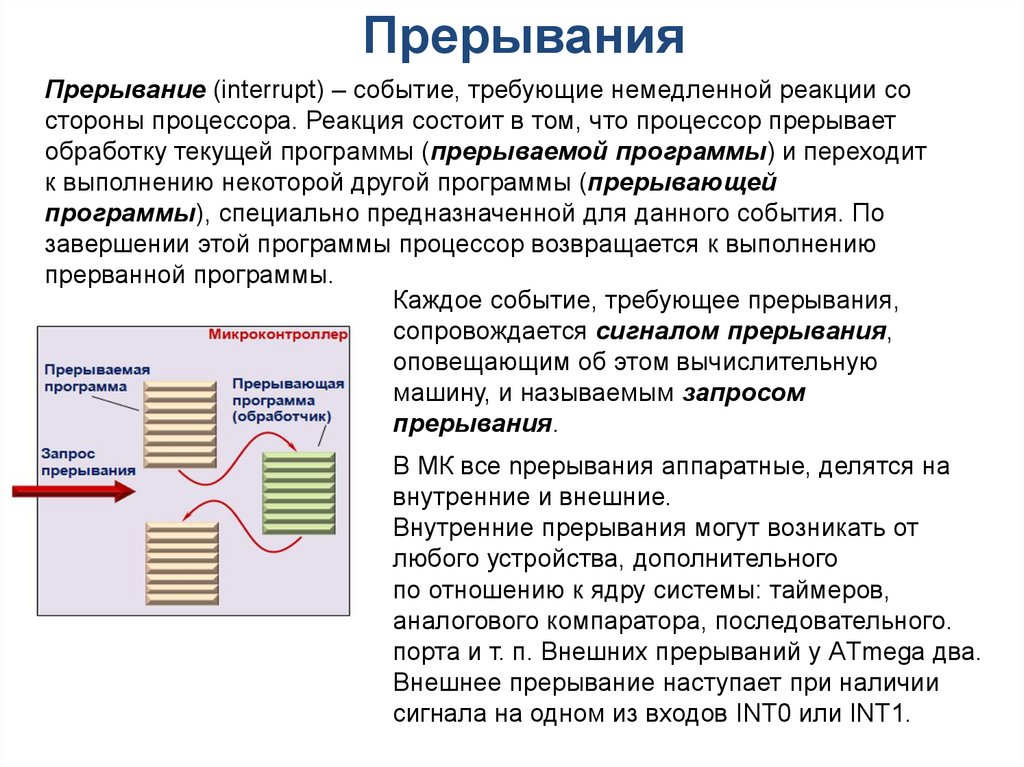
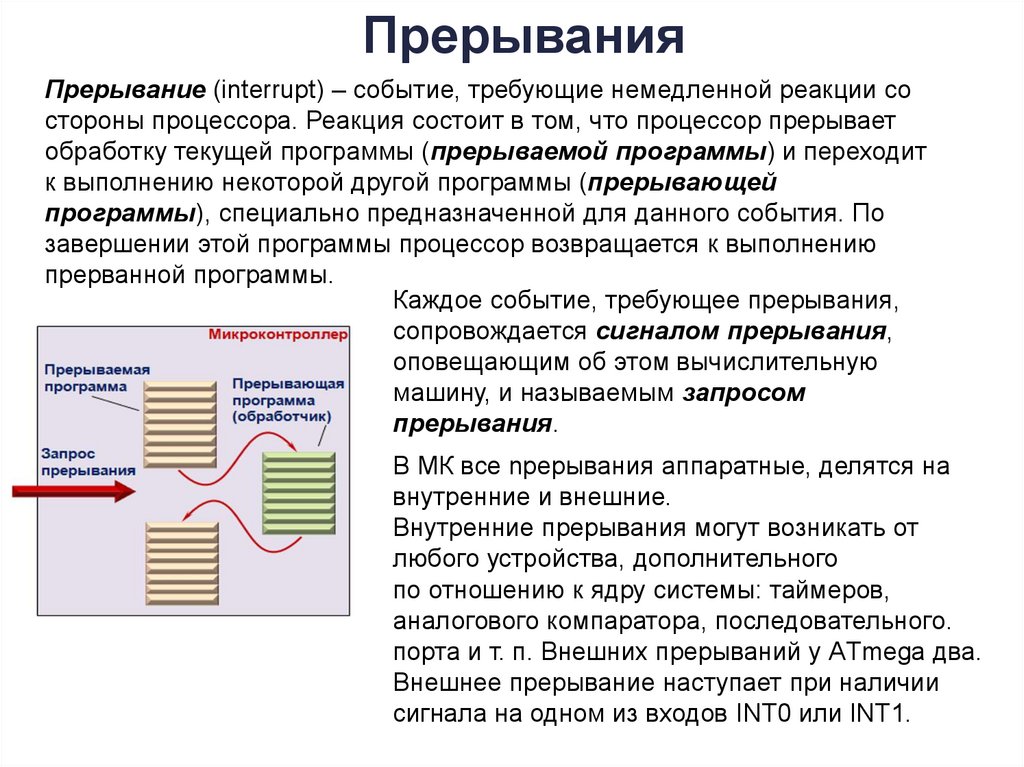
ПрерыванияПрерывание (interrupt) – событие, требующие немедленной реакции со
стороны процессора. Реакция состоит в том, что процессор прерывает
обработку текущей программы (прерываемой программы) и переходит
к выполнению некоторой другой программы (прерывающей
программы), специально предназначенной для данного события. По
завершении этой программы процессор возвращается к выполнению
прерванной программы.
Каждое событие, требующее прерывания,
сопровождается сигналом прерывания,
оповещающим об этом вычислительную
машину, и называемым запросом
прерывания.
В МК все nрерывания аппаратные, делятся на
внутренние и внешние.
Внутренние прерывания могут возникать от
любого устройства, дополнительного
по отношению к ядру системы: таймеров,
аналогового компаратора, последовательного.
порта и т. п. Внешних прерываний у АTmega два.
Внешнее прерывание наступает при наличии
сигнала на одном из входов INT0 или INТ1.
46.
ПрерыванияСостояние программы представляет собой совокупность состояний всех
запоминающих элементов после выполнения последней команды. При
возникновении прерывания микроконтроллер сохраняет в стеке содержимое
счетчика команд и загружает в него адрес соответствующего вектора
прерывания. Последней командой подпрограммы обработки прерывания
должна быть команда, которая осуществляет возврат в основную программу и
восстановление предварительно сохраненного счетчика команд. Во время
выполнения обработчика прерывания некоторая информация может
подвергнуться изменению. Поэтому при переходе к обработчику прерывания
необходимо сохранить элементы, подвергающиеся изменению. Набор таких
элементов представляет собой вектор состояния программы.
Вектор прерывания является вектором начального состояния прерывающей
программы (обработчика) и содержит всю необходимую информацию для
перехода к обработчику, в том числе его начальный адрес. Каждому типу
прерываний соответствует свой вектор прерывания, который инициализирует
выполнение соответствующего обработчика. Обычно векторы прерывания
хранятся в специально выделенных фиксированных ячейках памяти с
короткими адресами, представляющих собой таблицу векторов
прерываний. Для перехода к соответствующей прерывающей программе
процессор должен располагать вектором прерывания и адресом этого вектора.
По этому адресу, как правило, находится команда безусловного перехода к
подпрограмме обработки прерывания.
47.
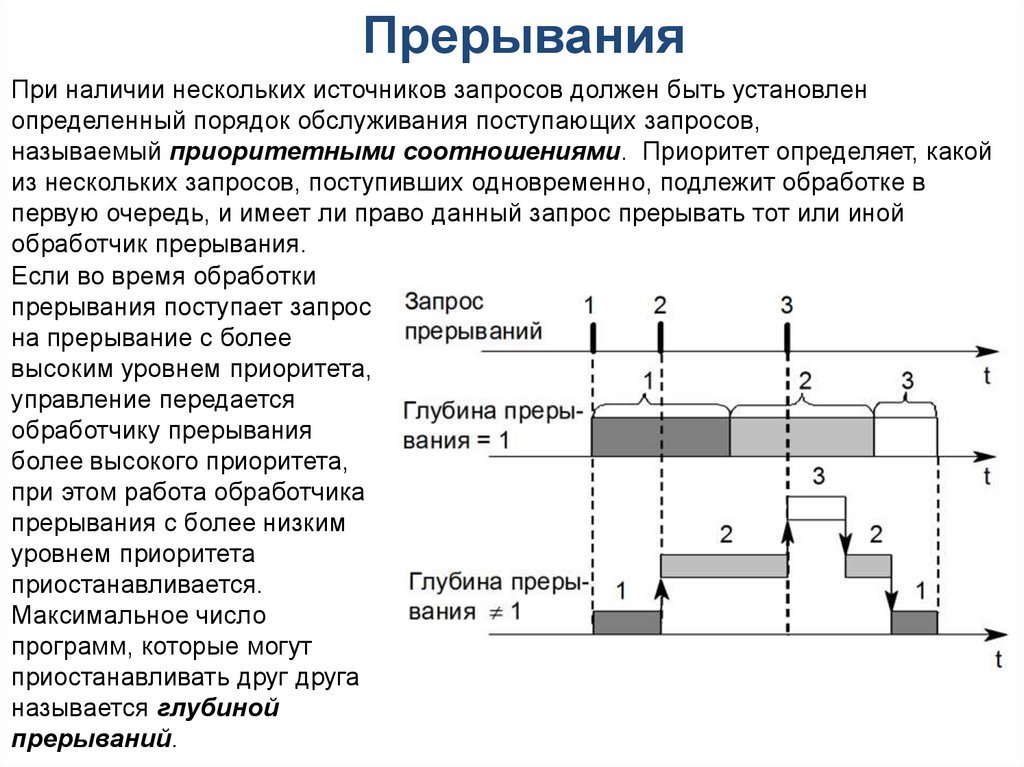
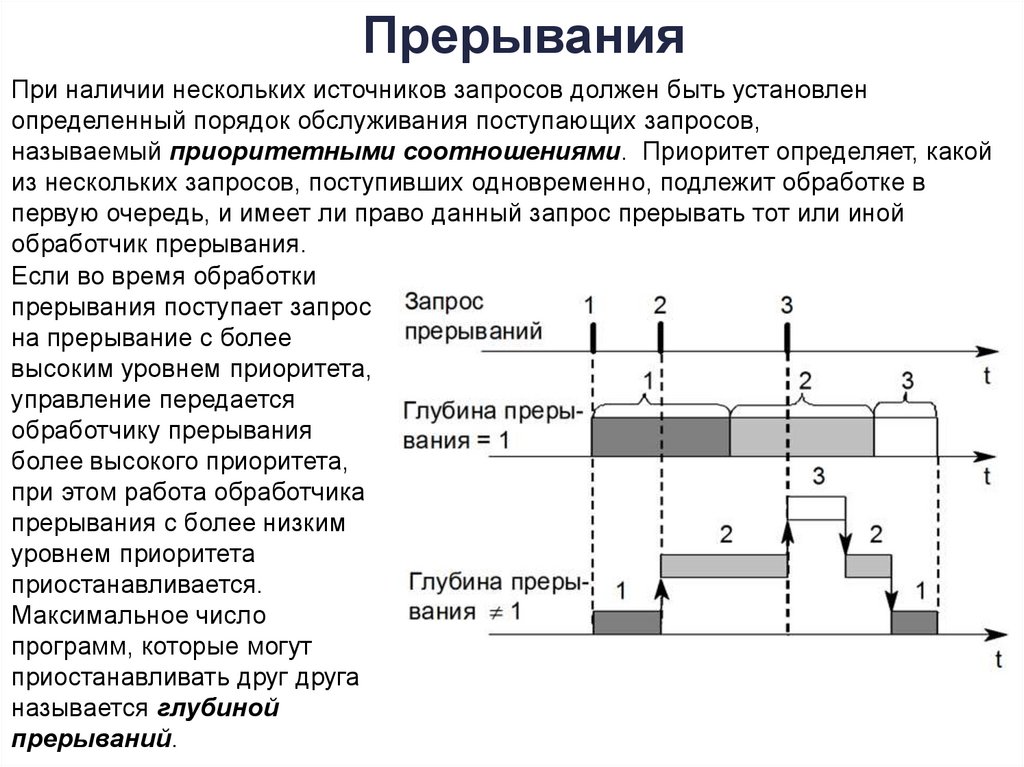
ПрерыванияПри наличии нескольких источников запросов должен быть установлен
определенный порядок обслуживания поступающих запросов,
называемый приоритетными соотношениями. Приоритет определяет, какой
из нескольких запросов, поступивших одновременно, подлежит обработке в
первую очередь, и имеет ли право данный запрос прерывать тот или иной
обработчик прерывания.
Если во время обработки
прерывания поступает запрос
на прерывание с более
высоким уровнем приоритета,
управление передается
обработчику прерывания
более высокого приоритета,
при этом работа обработчика
прерывания с более низким
уровнем приоритета
приостанавливается.
Максимальное число
программ, которые могут
приостанавливать друг друга
называется глубиной
прерываний.
48.
ПрерыванияМаскирование прерываний используется для сообщения микроконтроллеру о
необходимости реагировать на каждый тип прерывания или игнорировать
его. Маска прерывания представляет двоичный код, разряды которого
поставлены в соответствие источникам запроса прерываний. Единичный бит в
двоичном коде сообщает микроконтроллеру о необходимости обработки
прерываний такого типа. Нулевой бит напротив не позволяет микроконтроллеру
переходить к обработке прерываний указанного типа.
Как правило, кроме маскирования прерываний, существует также бит глобального
разрешения прерываний, нулевое значение которого отключает все обработчики
прерываний (кроме аппаратного сброса и перехода к началу исполняемой
программы).
Кроме двоичного кода маски прерываний существует также двоичный
код флагов прерываний, который позволяет обработчику прерываний
установить источник возникновения прерывания в случае если источников с
указанным запросом в микроконтроллере несколько.
49.
ПрерыванияДля надлежащего управления этим процессом флаги прерываний образуют
иерархию.
Во главе данной структуры стоит бит I регистра флагов SREG, который
разрешает (если установлен в логическую единицу) или запрещает (если
установлен в логический нуль) аппаратные прерывания вообще. Как правило,
непосредственно с этим битом (как и вообще с регистром SREG) программисту
дело можно не иметь: для общего разрешения (запрещения) прерываний
предусмотрены специальные команды sei (разрешить) и cli (запретить),
устанавливающие данный бит в нужное состояние. Отметим, что по умолчанию
бит I регистра флагов SREG сброшен, т. е. прерывания при запуске МК
запрещены. Для того чтобы их разрешить, необходимо в процедуре начальной
инициализации, выполняющейся по сбросу МК," разместить команду sei.
Кроме общего флага прерываний, для каждого конкретного прерывания имеется
свой разрешающий/запрещающий бит, расположенный в соответствующем
регистре (например, для таймеров это регистры ТIМSК или ЕТ IМSК, для
внешних прерываний- GIМSК). Для разрешения прерываний указанные биты
необходимо устанавливать в состояние логической единицы, в противном случае
автоматического вызова прерываний не произойдет.
50.
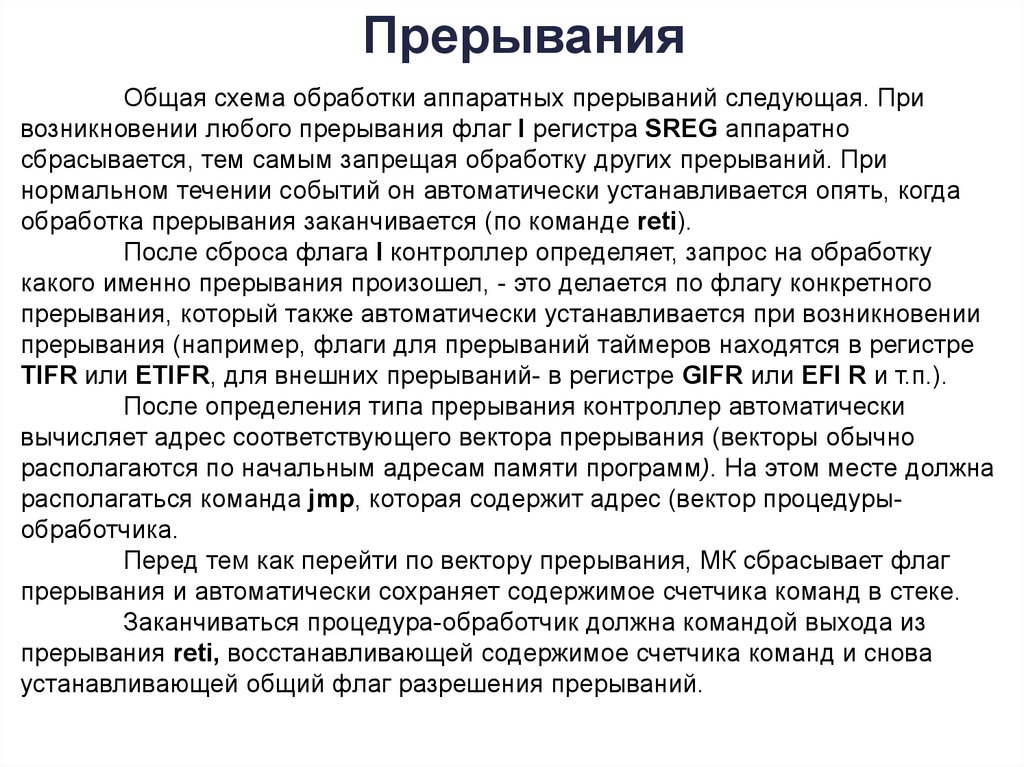
ПрерыванияОбщая схема обработки аппаратных прерываний следующая. При
возникновении любого прерывания флаг I регистра SREG аппаратно
сбрасывается, тем самым запрещая обработку других прерываний. При
нормальном течении событий он автоматически устанавливается опять, когда
обработка прерывания заканчивается (по команде reti).
После сброса флага I контроллер определяет, запрос на обработку
какого именно прерывания произошел, - это делается по флагу конкретного
прерывания, который также автоматически устанавливается при возникновении
прерывания (например, флаги для прерываний таймеров находятся в регистре
TIFR или ETIFR, для внешних прерываний- в регистре GIFR или EFI R и т.п.).
После определения типа прерывания контроллер автоматически
вычисляет адрес соответствующего вектора прерывания (векторы обычно
располагаются по начальным адресам памяти программ). На этом месте должна
располагаться команда jmp, которая содержит адрес (вектор процедурыобработчика.
Перед тем как перейти по вектору прерывания, МК сбрасывает флаг
прерывания и автоматически сохраняет содержимое счетчика команд в стеке.
Заканчиваться процедура-обработчик должна командой выхода из
прерывания reti, восстанавливающей содержимое счетчика команд и снова
устанавливающей общий флаг разрешения прерываний.
51.
Режимы энергосбережения1. IDLE MODE (режим ожидания)- режим, в котором останавливается GPU (а
также устройство управления выборкой команд из памяти). Все периферийные
устройства(таймеры, АЦП, порты) продолжают функционировать. Поэтому
значительной экономии не получается: потребление снижается лишь на 30-50%.
Очевидно, что режим Idle целесообразен, когда общее потребление устройства
лимитирует именно МК, который при этом обязательно должен находиться в
состоянии постоянной готовности. Во всех остальных случаях следует выбирать
режимы «глубокого» энергосбережения, когда собственное потребление МК
снижается до единиц или десятков микроампер.
2.POWER DOWN MODE - режим, общий для всех моделей МК. В нем
останавливаются все узлы МК, за исключением сторожевого таймера, системы
обработки внешних асинхронных прерываний и модуля ·тw1. Соответственно,
выход из данного режима возможен либо по сбросу МК (в том числе и от
сторожевого таймера), либо от прерывания TWI, либо от внешнего прерывания.
Важная особенность Power Down mode - остановка тактового генератора.
3. POWER SAVE MODE - таймер продолжит работу и в этом режиме.
Практически используется при реализации часов реального времени.
4. STANDBY MODE - отличается от Power Down тем, что в этом режиме
продолжает работать тактовый генератор (только при установке внешнего
резонатора). Режим полезен тем, что позволяет выходить из «спящего»
состояния всего за 6 тактов.
52.
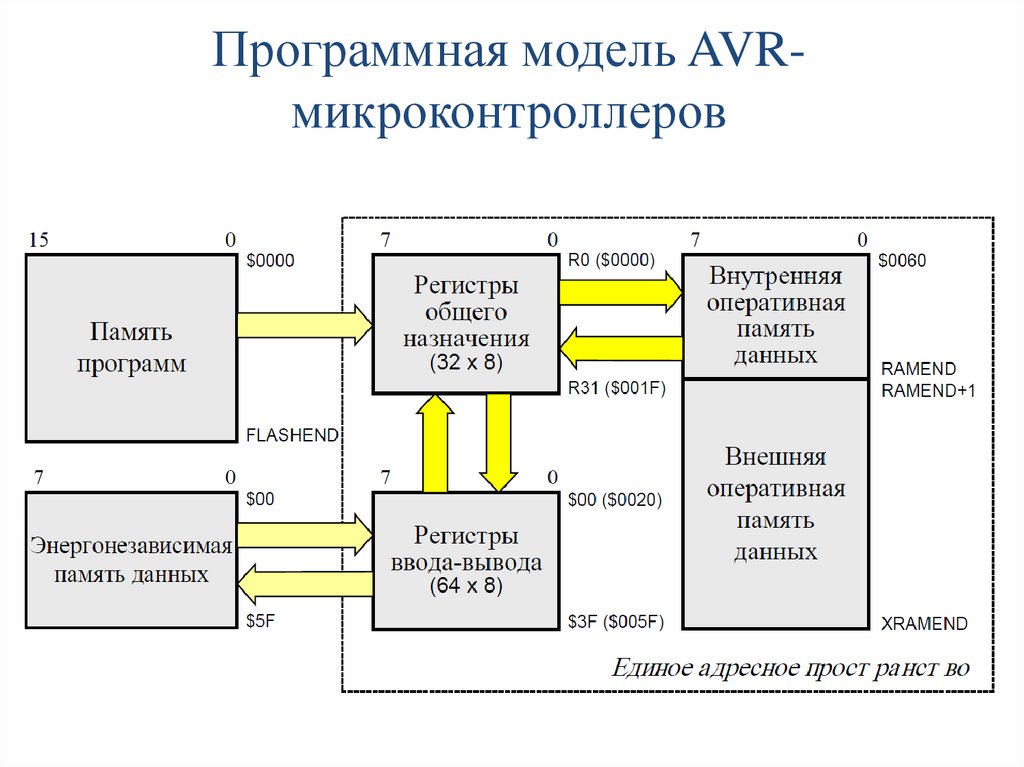
Программная модель AVRмикроконтроллеров53.
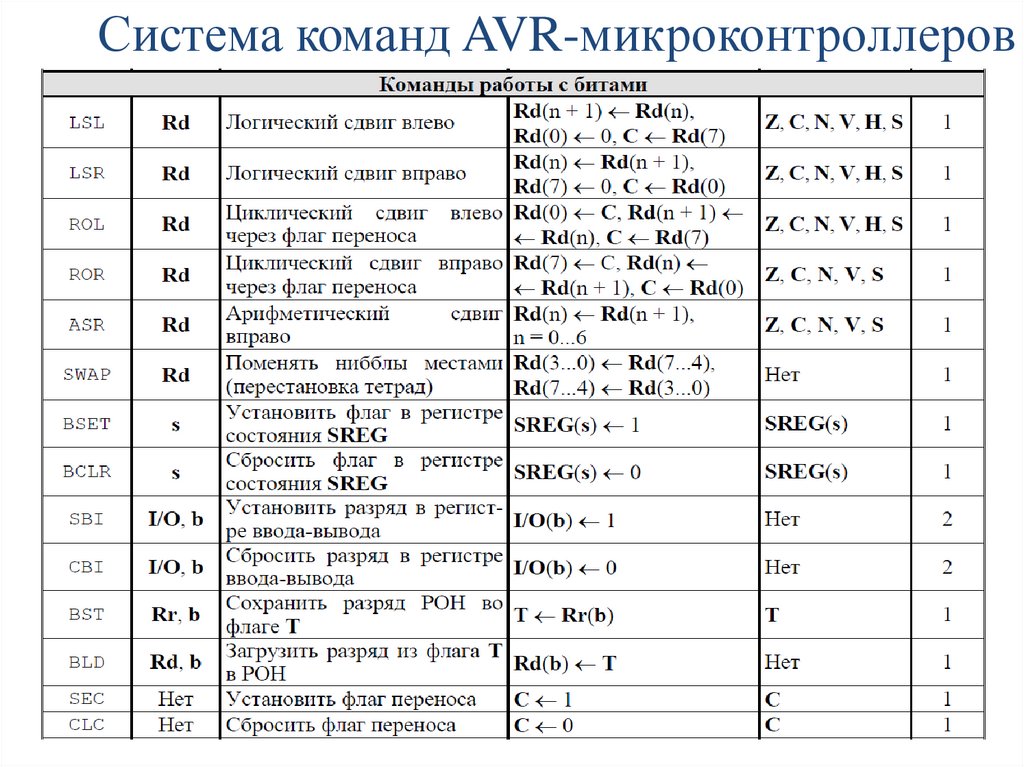
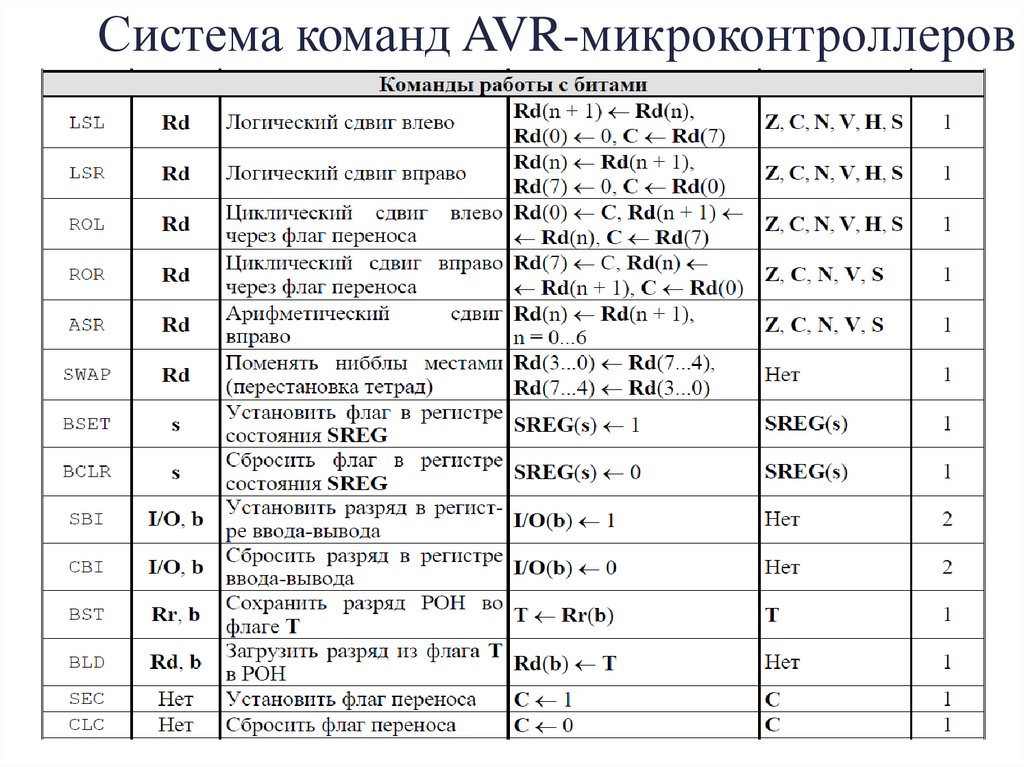
Система команд AVR-микроконтроллеровСистема команд (instruction set) микропроцессора
представляет собой совокупность выполняемых микропроцессором операций и правила их кодирования в
программе.
Система команд AVR-микроконтроллеров включает
команды (инструкции) арифметических и логических
операций,
команды
ветвления,
управляющие
последовательностью выполнения программы, команды
передачи данных и команды операций с битами.
Всего
инструкций.
в
систему
команд
входит
более
130
54.
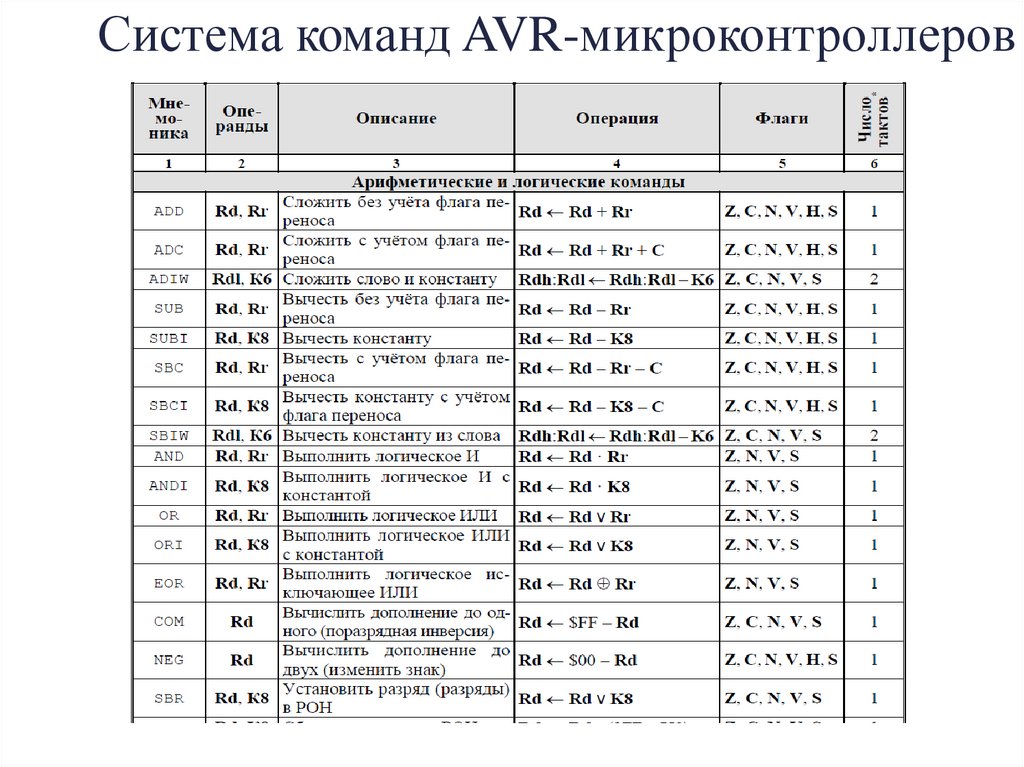
Система команд AVR-микроконтроллеров55.
Система команд AVR-микроконтроллеров56.
Система команд AVR-микроконтроллеров57.
Система команд AVR-микроконтроллеров58.
Способы адресации операндов в AVR-микроконтроллерахСпособ формирования адреса операнда, указание на который
содержится в команде, называется адресацией. С помощью того или иного
способа адресации вычисляется физический адрес, который поступает на
шину адреса процессора для выбора ячейки памяти или регистра,
используемых в команде.
В AVR-микроконтроллерах возможны три типа команд :
безадресные;
одноадресные;
двухадресные.
В первом типе команд присутствует только код операции (КОП),
определяющий выполняемую командой функцию. В командах второго и
третьего типов помимо кода операции содержится адресная часть,
устанавливающая способ доступа соответственно к одному или двум
участвующим в команде операндам (аргументам команды).
В соответствии с типом адресуемой памяти способы адресации в
AVR-микроконтроллерах можно разделить на способы адресации:
РОН и регистров ввода-вывода;
оперативной памяти данных (ОЗУ);
памяти программ
59.
Способы адресации операндов в AVR-микроконтроллерахПрямая регистровая адресация
предусмотрена для адресации РОН и регистров ввода-вывода.
При прямой регистровой адресации РОН операндом является
содержимое регистра общего назначения, указанного в команде. Команды с
прямой регистровой адресацией могут адресовать один (Rd) или два (Rr и Rd)
РОН . Во втором случае результат выполнения команды со-храняется в регистре
Rd. Прямая регистровая адресация РОН применяется во всех арифметических и
логических командах, а также в некоторых командах работы с битами, т. к. эти
команды выполняются в АЛУ только над содержимым РОН. Команды, вторым
операндом которых является константа, могут использовать в качестве первого
операнда только регистры из старшей половины РОН (R16…R31).
При прямой регистровой адресации регистра ввода-вывода операнд
содержится в регистре ввода-вывода, указанном в команде. Адрес регистра вводавывода хранится в шести разрядах слова команды ( где n определяет адрес
регистра-источника или регистра-приёмника в РОН). Прямая регистровая
адресация регистров ввода-вывода используется в командах чтения IN и записи
OUT регистра ввода-вывода, а также в ряде других команд работы с регистрами
ввода-вывода.
60.
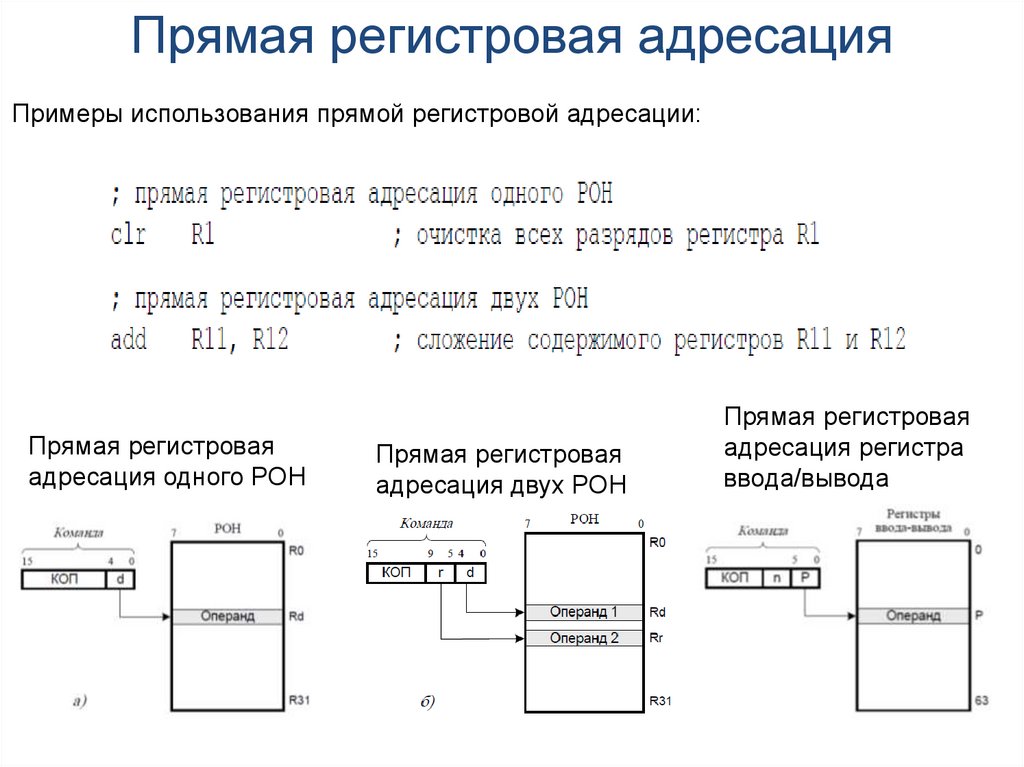
Прямая регистровая адресацияПримеры использования прямой регистровой адресации:
Прямая регистровая
адресация одного РОН
Прямая регистровая
адресация двух РОН
Прямая регистровая
адресация регистра
ввода/вывода
61.
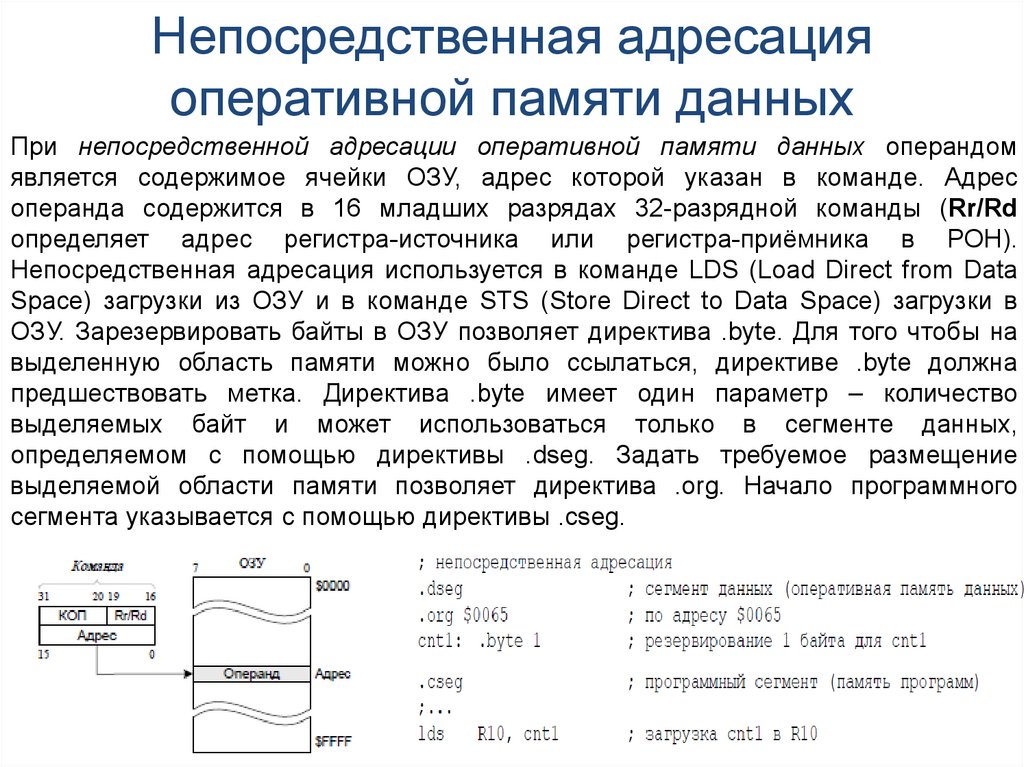
Непосредственная адресацияоперативной памяти данных
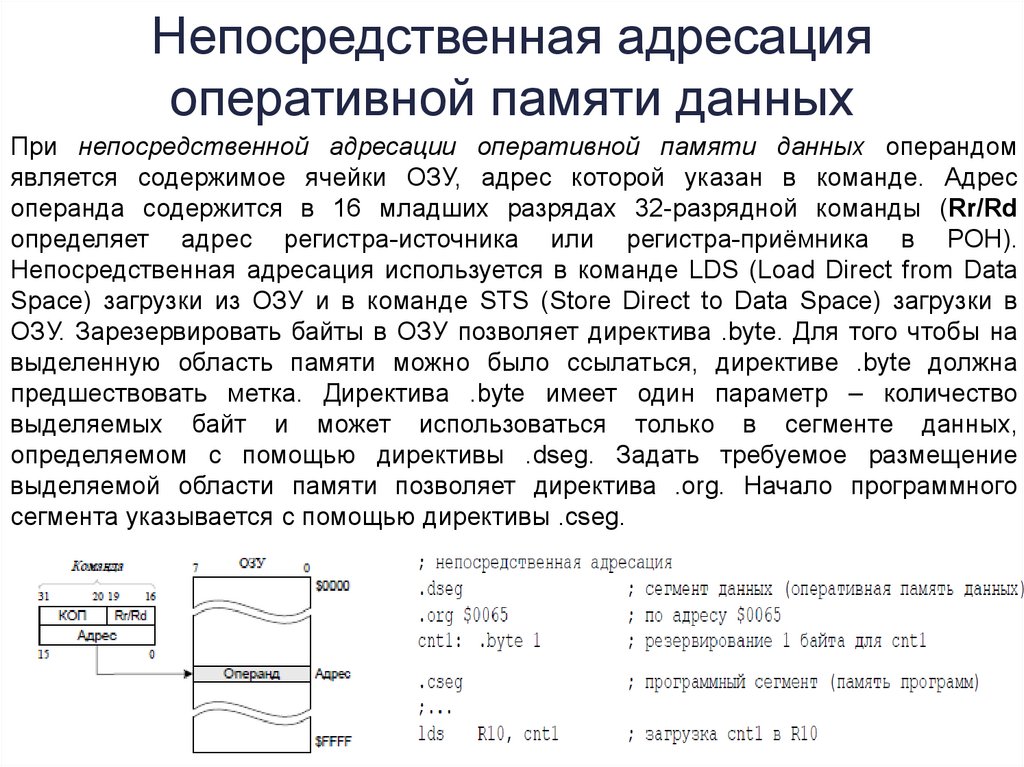
При непосредственной адресации оперативной памяти данных операндом
является содержимое ячейки ОЗУ, адрес которой указан в команде. Адрес
операнда содержится в 16 младших разрядах 32-разрядной команды (Rr/Rd
определяет адрес регистра-источника или регистра-приёмника в РОН).
Непосредственная адресация используется в команде LDS (Load Direct from Data
Space) загрузки из ОЗУ и в команде STS (Store Direct to Data Space) загрузки в
ОЗУ. Зарезервировать байты в ОЗУ позволяет директива .byte. Для того чтобы на
выделенную область памяти можно было ссылаться, директиве .byte должна
предшествовать метка. Директива .byte имеет один параметр – количество
выделяемых байт и может использоваться только в сегменте данных,
определяемом с помощью директивы .dseg. Задать требуемое размещение
выделяемой области памяти позволяет директива .org. Начало программного
сегмента указывается с помощью директивы .cseg.
62.
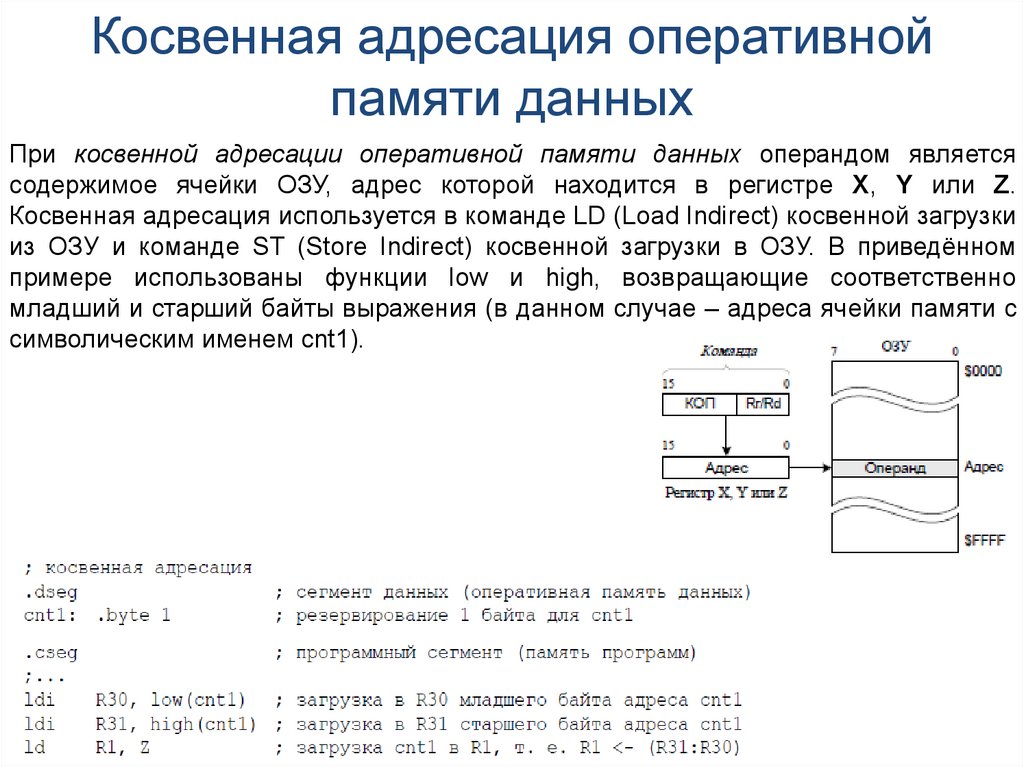
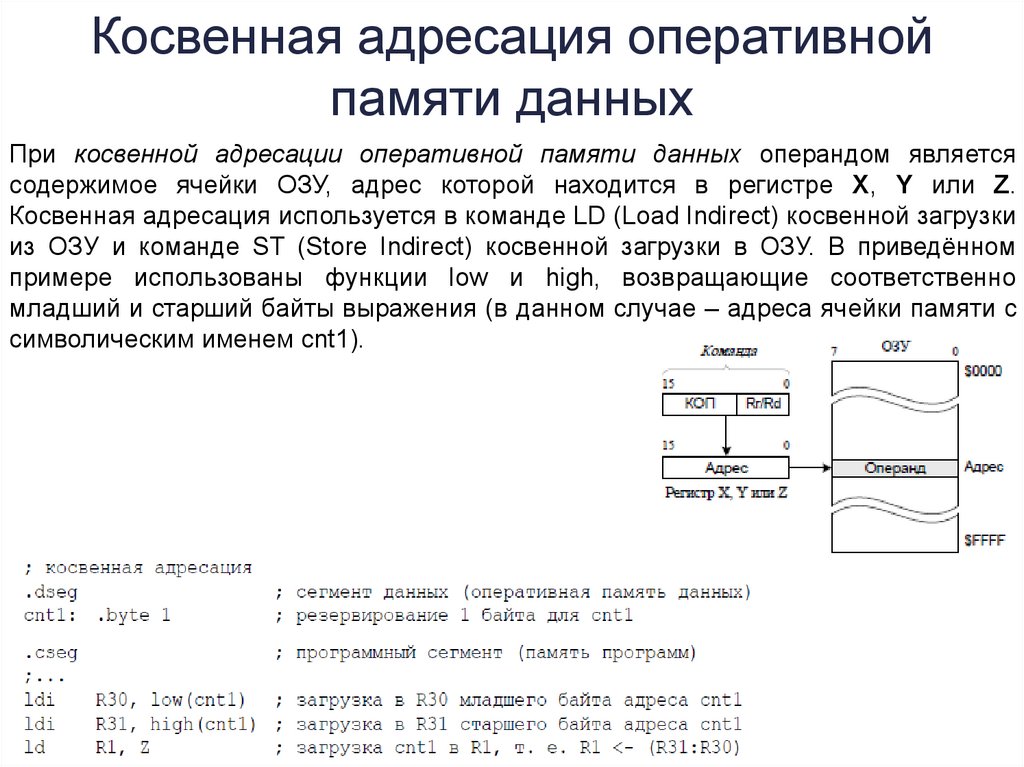
Косвенная адресация оперативнойпамяти данных
При косвенной адресации оперативной памяти данных операндом является
содержимое ячейки ОЗУ, адрес которой находится в регистре X, Y или Z.
Косвенная адресация используется в команде LD (Load Indirect) косвенной загрузки
из ОЗУ и команде ST (Store Indirect) косвенной загрузки в ОЗУ. В приведённом
примере использованы функции low и high, возвращающие соответственно
младший и старший байты выражения (в данном случае – адреса ячейки памяти с
символическим именем cnt1).
63.
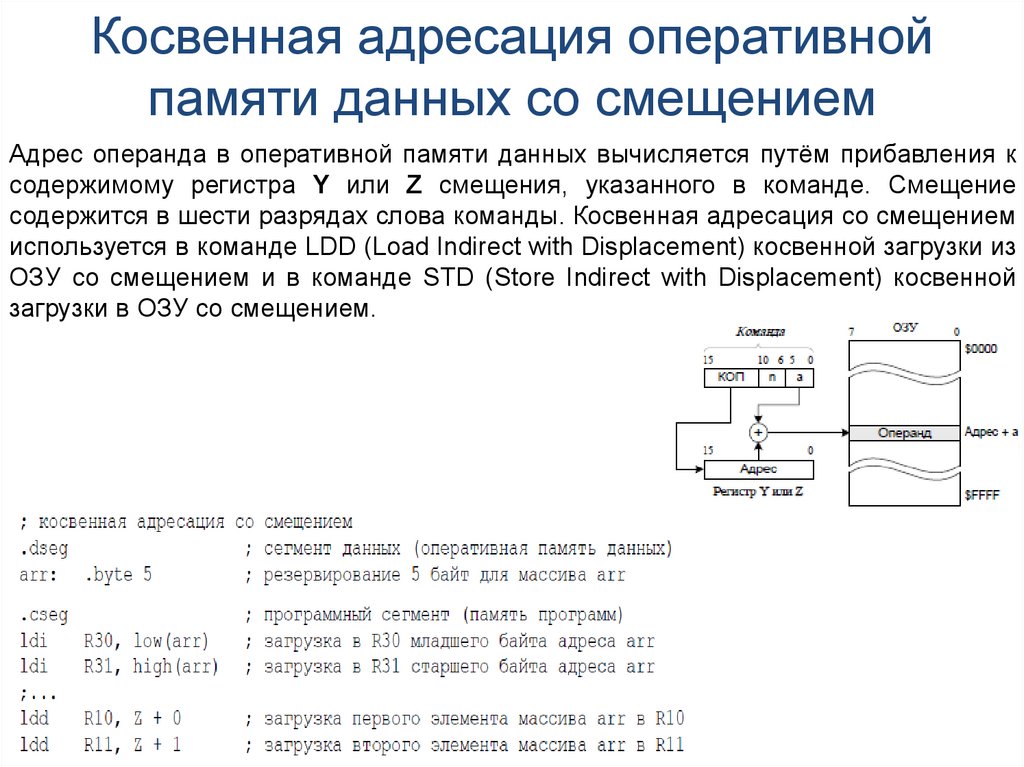
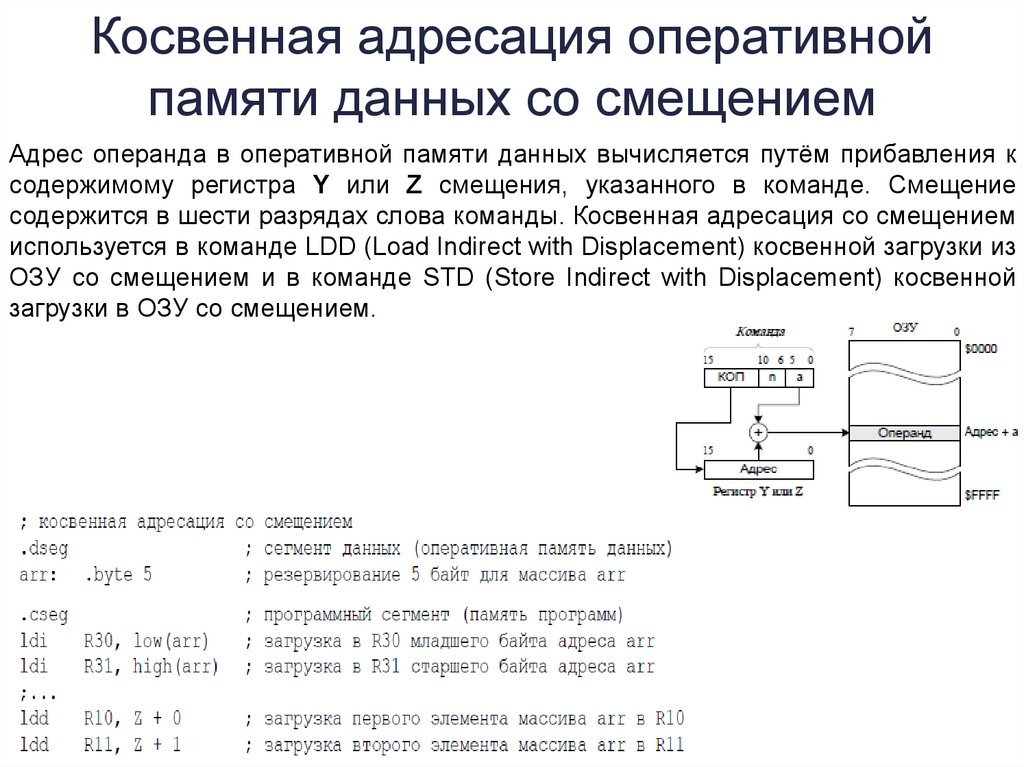
Косвенная адресация оперативнойпамяти данных со смещением
Адрес операнда в оперативной памяти данных вычисляется путём прибавления к
содержимому регистра Y или Z смещения, указанного в команде. Смещение
содержится в шести разрядах слова команды. Косвенная адресация со смещением
используется в команде LDD (Load Indirect with Displacement) косвенной загрузки из
ОЗУ со смещением и в команде STD (Store Indirect with Displacement) косвенной
загрузки в ОЗУ со смещением.
64.
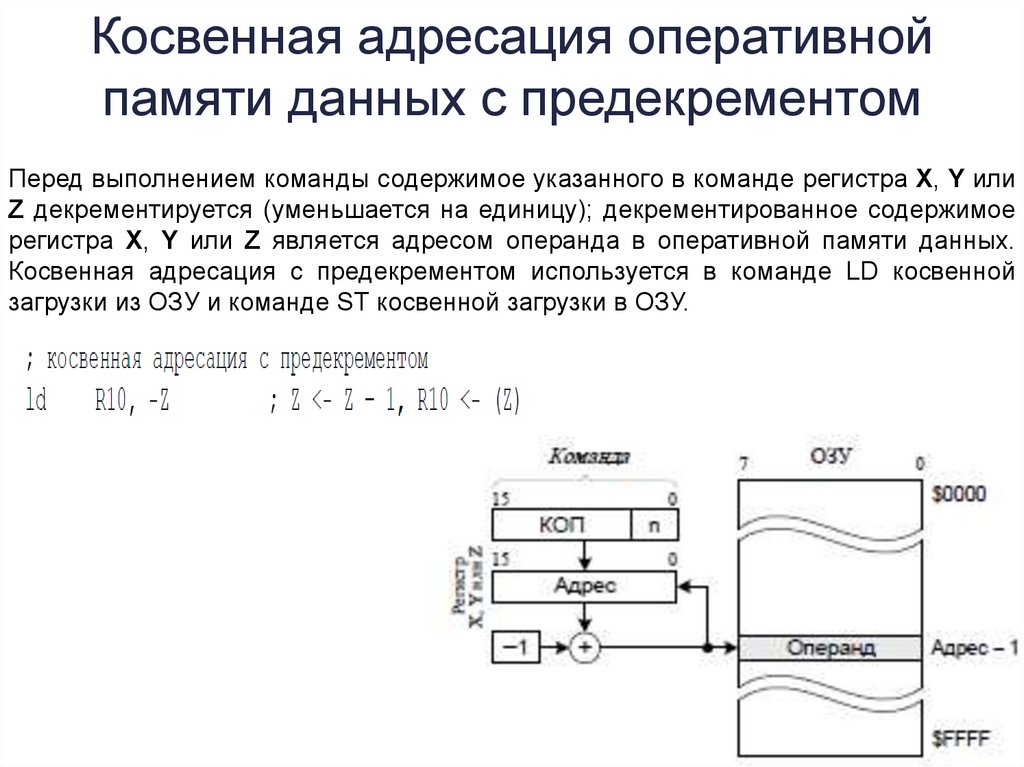
Косвенная адресация оперативнойпамяти данных с предекрементом
Перед выполнением команды содержимое указанного в команде регистра X, Y или
Z декрементируется (уменьшается на единицу); декрементированное содержимое
регистра X, Y или Z является адресом операнда в оперативной памяти данных.
Косвенная адресация с предекрементом используется в команде LD косвенной
загрузки из ОЗУ и команде ST косвенной загрузки в ОЗУ.
65.
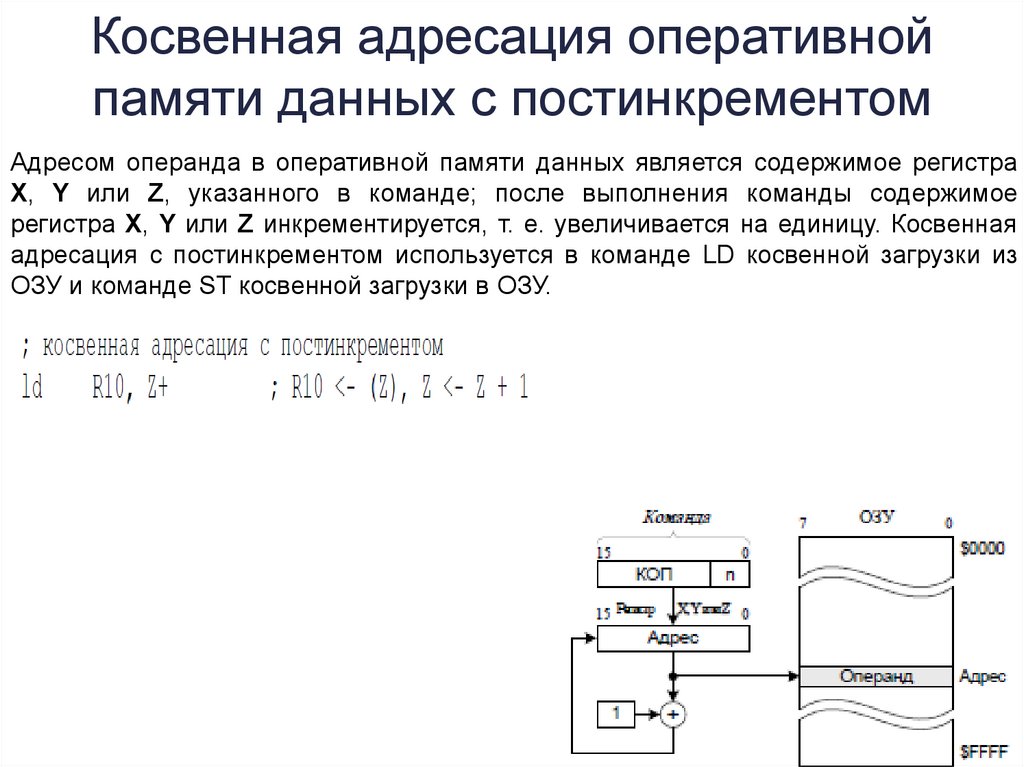
Косвенная адресация оперативнойпамяти данных с постинкрементом
Адресом операнда в оперативной памяти данных является содержимое регистра
X, Y или Z, указанного в команде; после выполнения команды содержимое
регистра X, Y или Z инкрементируется, т. е. увеличивается на единицу. Косвенная
адресация с постинкрементом используется в команде LD косвенной загрузки из
ОЗУ и команде ST косвенной загрузки в ОЗУ.
66.
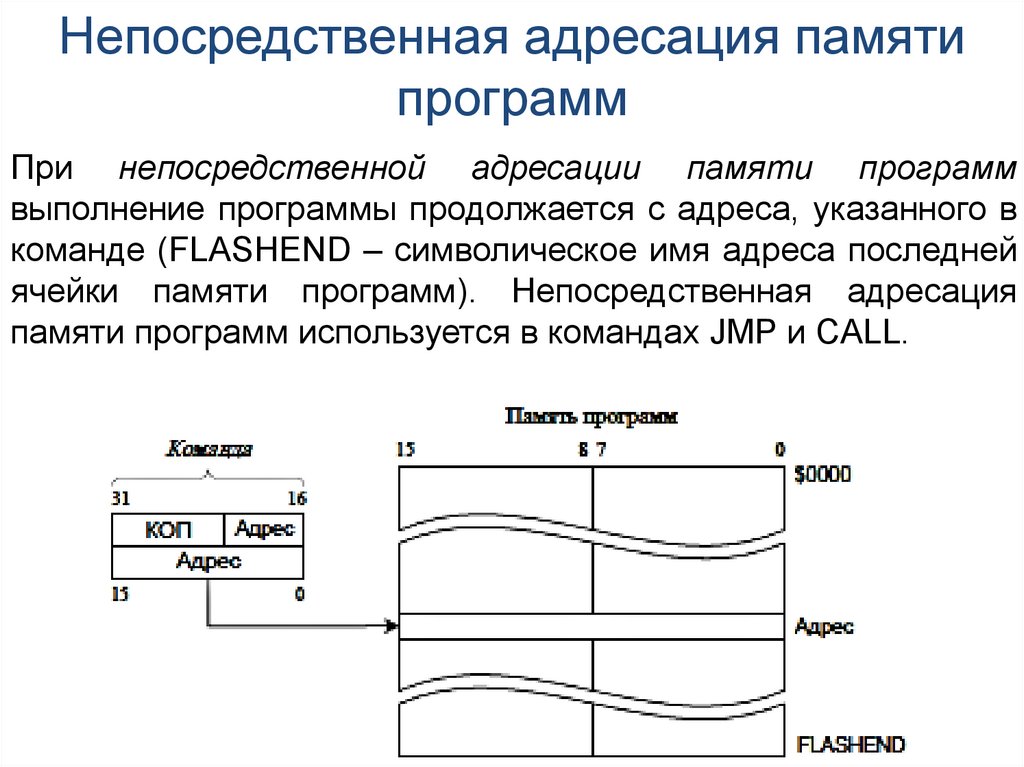
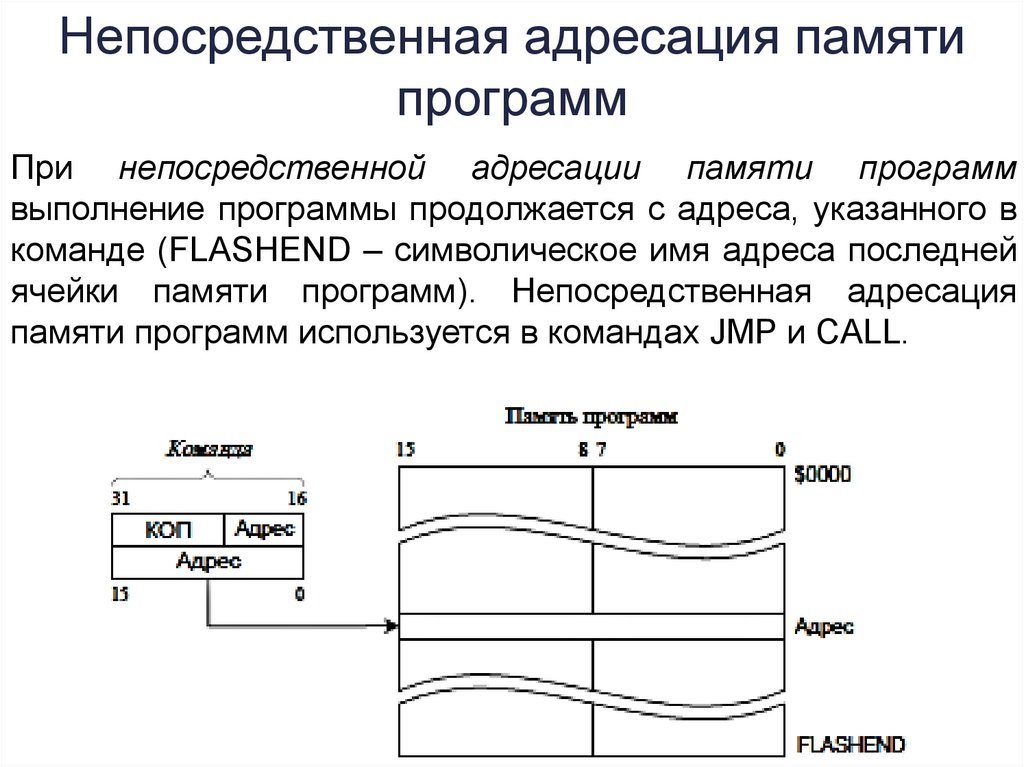
Непосредственная адресация памятипрограмм
При непосредственной адресации памяти программ
выполнение программы продолжается с адреса, указанного в
команде (FLASHEND – символическое имя адреса последней
ячейки памяти программ). Непосредственная адресация
памяти программ используется в командах JMP и CALL.
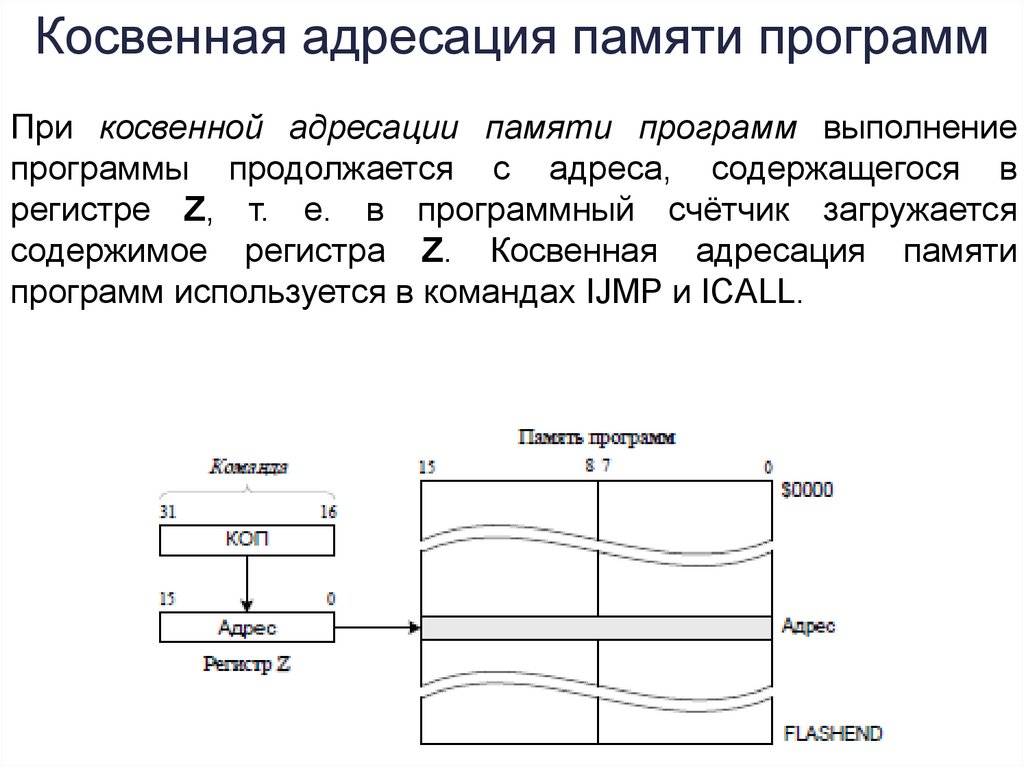
67.
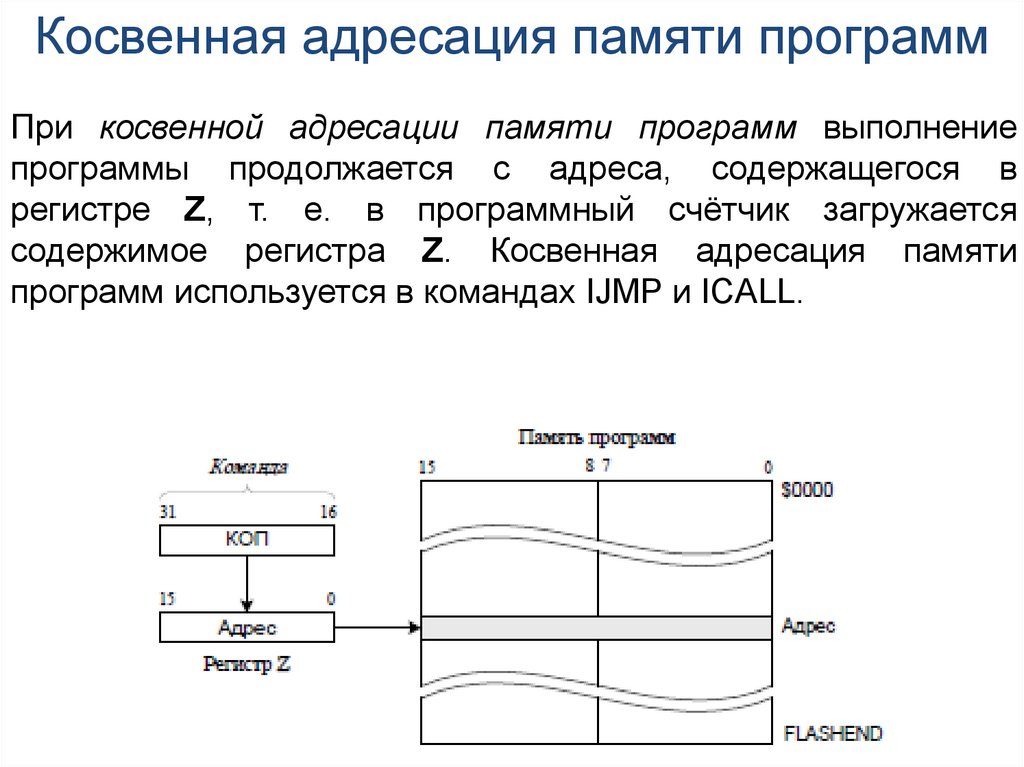
Косвенная адресация памяти программПри косвенной адресации памяти программ выполнение
программы продолжается с адреса, содержащегося в
регистре Z, т. е. в программный счётчик загружается
содержимое регистра Z. Косвенная адресация памяти
программ используется в командах IJMP и ICALL.
68.
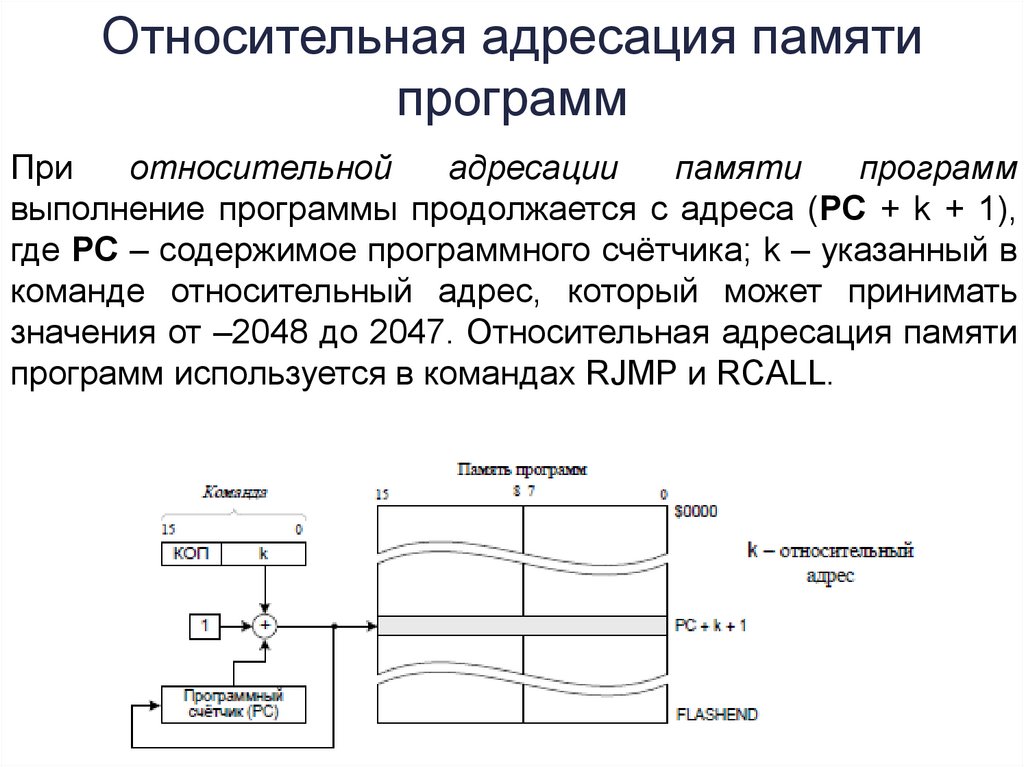
Относительная адресация памятипрограмм
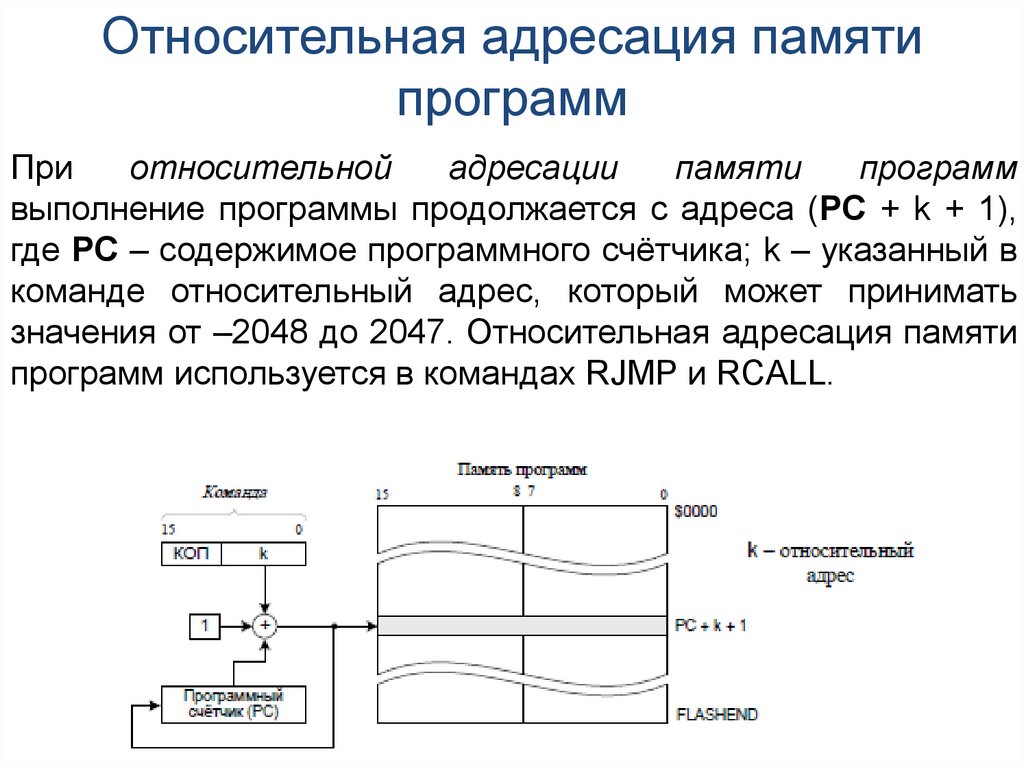
При
относительной
адресации
памяти
программ
выполнение программы продолжается с адреса (PC + k + 1),
где PC – содержимое программного счётчика; k – указанный в
команде относительный адрес, который может принимать
значения от –2048 до 2047. Относительная адресация памяти
программ используется в командах RJMP и RCALL.
69.
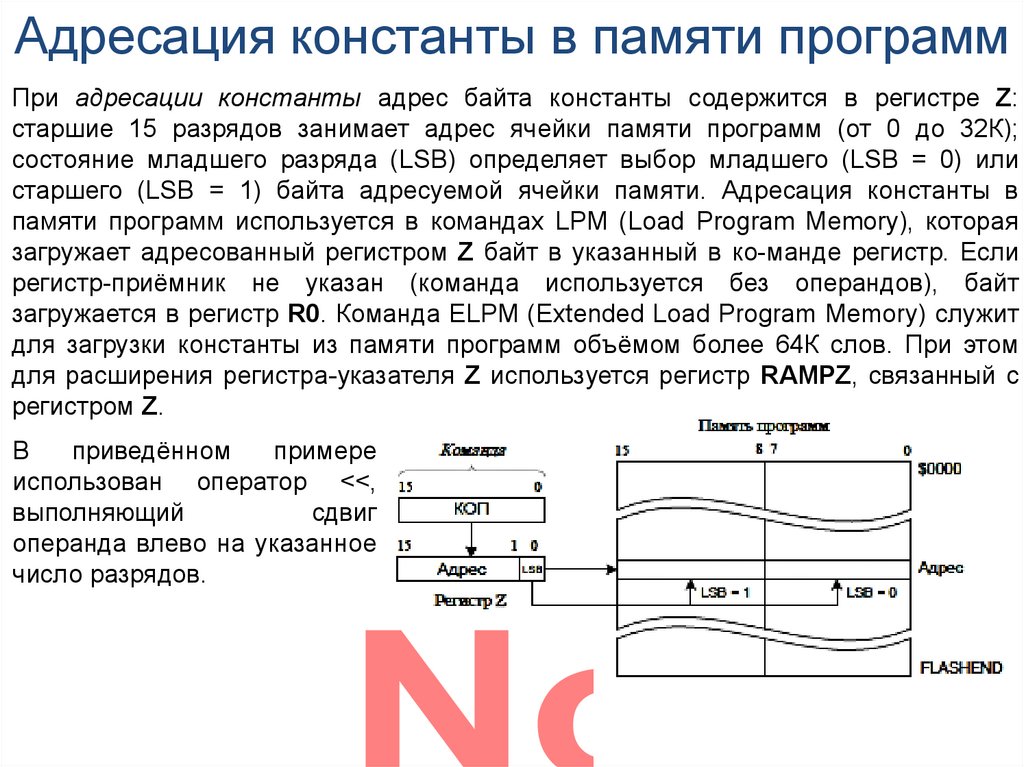
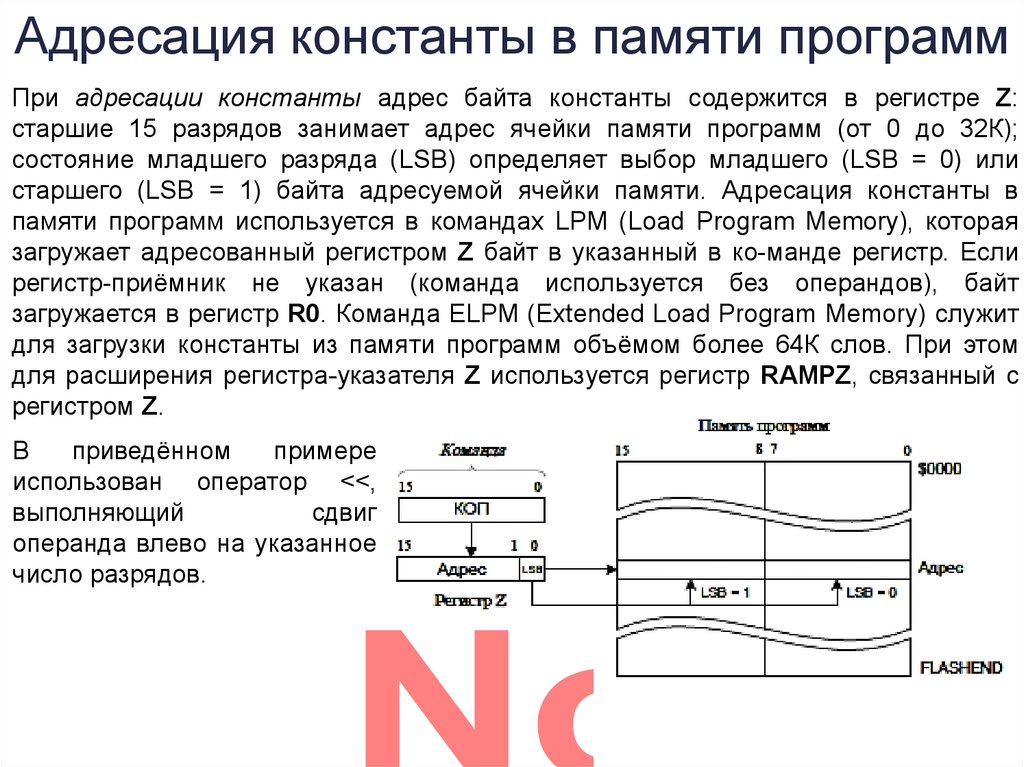
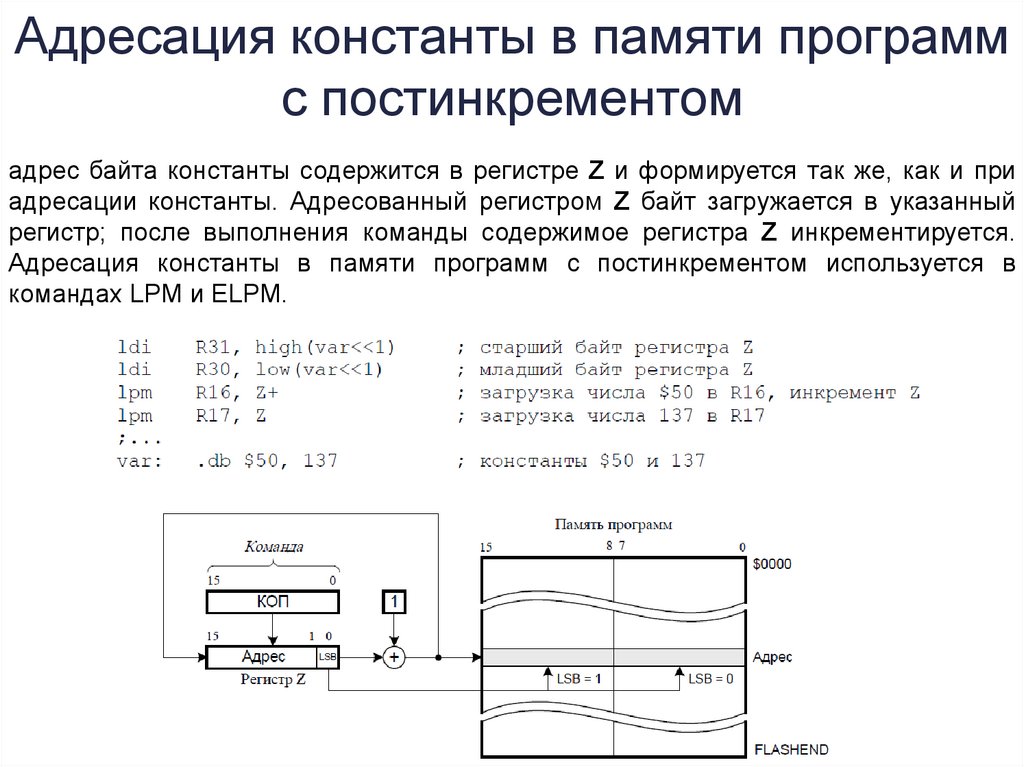
Адресация константы в памяти программПри адресации константы адрес байта константы содержится в регистре Z:
старшие 15 разрядов занимает адрес ячейки памяти программ (от 0 до 32К);
состояние младшего разряда (LSB) определяет выбор младшего (LSB = 0) или
старшего (LSB = 1) байта адресуемой ячейки памяти. Адресация константы в
памяти программ используется в командах LPM (Load Program Memory), которая
загружает адресованный регистром Z байт в указанный в ко-манде регистр. Если
регистр-приёмник не указан (команда используется без операндов), байт
загружается в регистр R0. Команда ELPM (Extended Load Program Memory) служит
для загрузки константы из памяти программ объёмом более 64К слов. При этом
для расширения регистра-указателя Z используется регистр RAMPZ, связанный с
регистром Z.
В
приведённом
примере
использован оператор <<,
выполняющий
сдвиг
операнда влево на указанное
число разрядов.
70.
Адресация константы в памяти программс постинкрементом
адрес байта константы содержится в регистре Z и формируется так же, как и при
адресации константы. Адресованный регистром Z байт загружается в указанный
регистр; после выполнения команды содержимое регистра Z инкрементируется.
Адресация константы в памяти программ с постинкрементом используется в
командах LPM и ELPM.
71.
Реализация типовых структуралгоритмов
Ветвления используются для выполнения различных частей
программы (разделения ветвей алгоритма) в зависимости от некоторых
условий.
В циклах одна и та же операция выполняется над содержимым
нескольких последовательно расположенных в памяти ячеек или
элементов данных.
В циклической программе можно выделить блоки:
1. Блок инициализации, в котором производится присвоение начальных
значений переменным, счётчикам, индексам и указателям. Указатели
представляют собой адреса данных в памяти.
2. Блок обработки, в котором выполняются требуемые вычисления, т. е.
одинаковые повторяющиеся действия над различными последовательно
расположенными в памяти данными.
3. Блок управления циклом, в котором изменяются значения счётчиков и
индексов (указателей) перед выполнением следующей повторяющейся
операции, а также производится проверка условия выхода из цикла.
4. Заключительный блок, в котором производится сохранение
полученных результатов.
72.
Команды безусловных переходовКоманды безусловных переходов JMP, RJMP, IJMP и EIJMP
передают управление по указанному в команде адресу памяти программ.
Команда JMP (Jump – переход) позволяет передавать управление
внутри всего объёма памяти программ.
Команда RJMP (Relative Jump – относительный переход)
обеспечива-ет переход в пределах ±2К слов (±4К байт) относительно
текущего содержимо-го программного счётчика.
По команде IJMP (Indirect Jump – косвенный пере-ход)
выполняется косвенный переход по адресу, указанному регистром Z; максимальное смещение составляет 64К слов (128К байт).
Команда EIJMP (Extend-ed Indirect Jump – расширенный
косвенный переход) обеспечивает косвенный переход по всему объёму
памяти программ; для расширения программного счётчика используется
регистр EIND. При выполнении команд безусловных переходов в
программный счётчик загружается адрес ячейки памяти программ, на
которую передаётся управление.
73.
Команды условных переходовКоманды BRхх (Branch if… – перейти, если …) выполняют
переход по результатам проверки разрядов регистра состояния SREG.
Коды условий (C, Z, N, V, S, H) формируются в регистре состояния при
выполнении арифметических, логических команд и команд работы с
битами и представляют собой признаки результата операции. Разряд С
устанавливается, если при выполнении команды был перенос из старшего
разряда результата. Разряд Z устанавливается, если результат
выполнения команды равен нулю. Разряд N устанавливается, если
старший значащий разряд результата равен 1. Разряд V (overflow –
переполнение) устанавливается, если при выполнении команды
произошло переполнение разрядной сетки числа со знаком. Разряд S = N
⊕ V (sign – знак) правильно показывает знак результата при переполнении
разрядной сетки числа со знаком. Разряд H (half carry – полуперенос)
устанавливается, если при выполнении команды был перенос из третьего
разряда результата.
Для организации ветвлений при сравнении операндов команды
BRхх используются совместно с командами CP (Compare) сравнения
содержимого двух РОН, CPC (Compare with Carry) сравнения с учётом
признака переноса и CPI (Compare with Immediate) сравнения с
константой.
74.
Команды условных переходовК командам условных переходов также относится команда CPSE
(Compare and Skip if Equal – сравнить и пропустить, если равно), которая
сравнивает содержимое двух РОН и пропускает следующую за ней
команду, если содержи-мое одинаково.
Команды SBRS, SBRC, SBIS, SBIC (Skip if Bit in Register [I/O
Register] is Set [Cleared] – пропустить, если разряд в регистре общего
назначения [ввода-вывода] установлен [сброшен]) пропускают следующую
команду в случае выполнения соответствующего условия.
75.
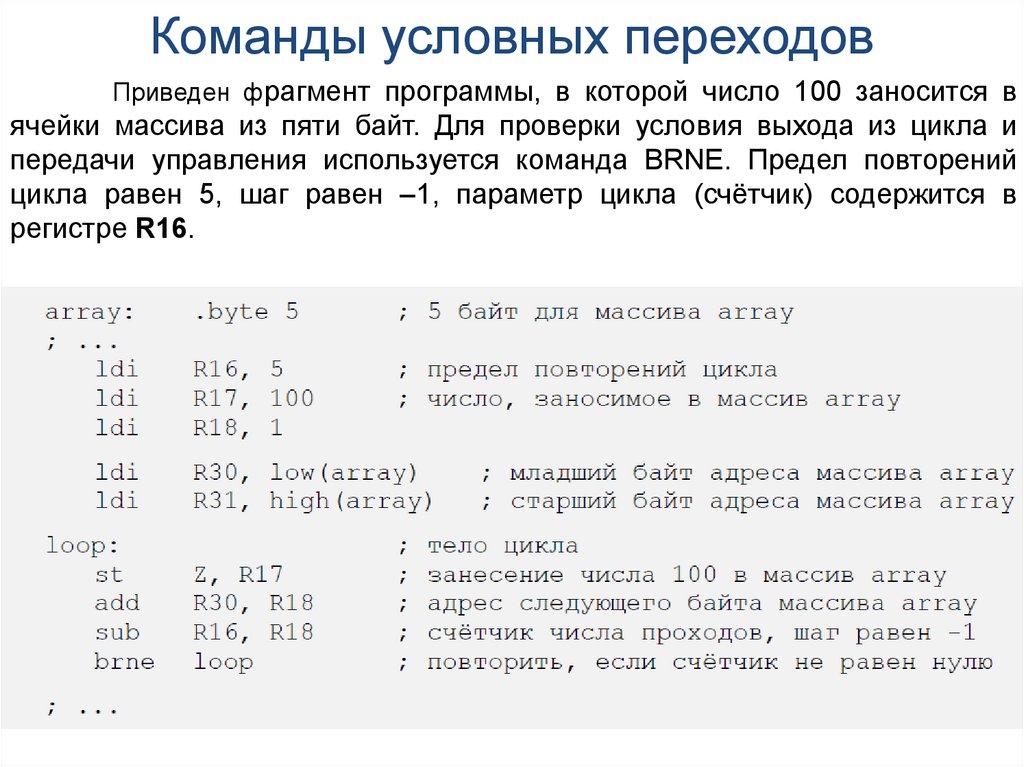
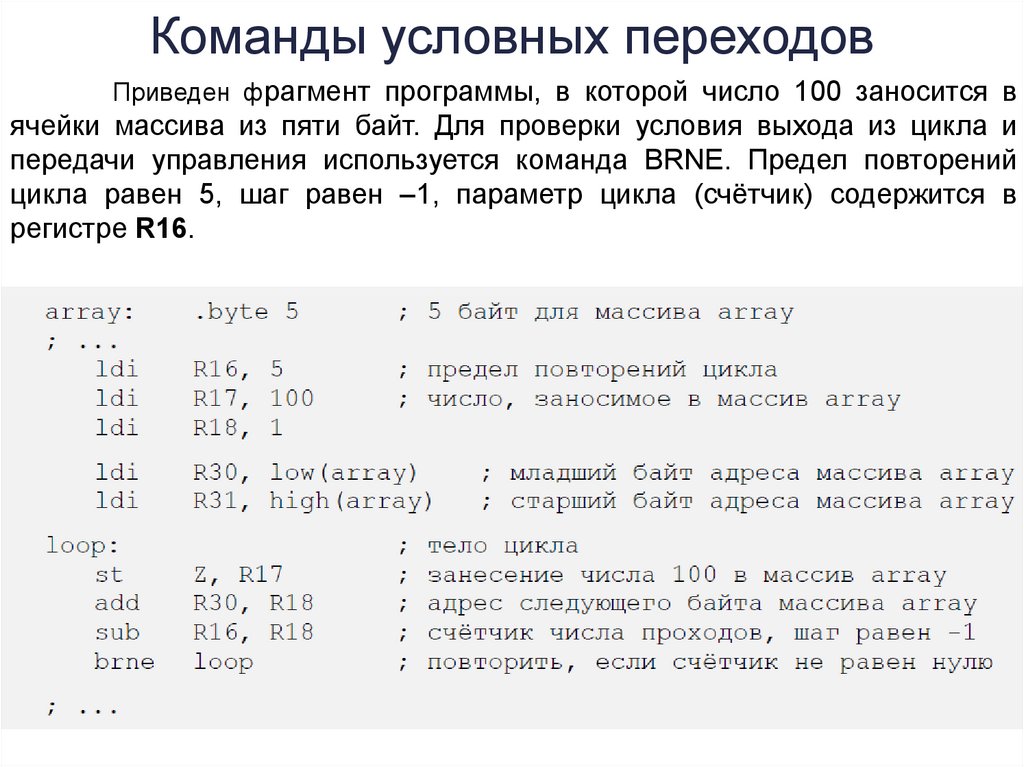
Команды условных переходовПриведен фрагмент программы, в которой число 100 заносится в
ячейки массива из пяти байт. Для проверки условия выхода из цикла и
передачи управления используется команда BRNE. Предел повторений
цикла равен 5, шаг равен –1, параметр цикла (счётчик) содержится в
регистре R16.
76.
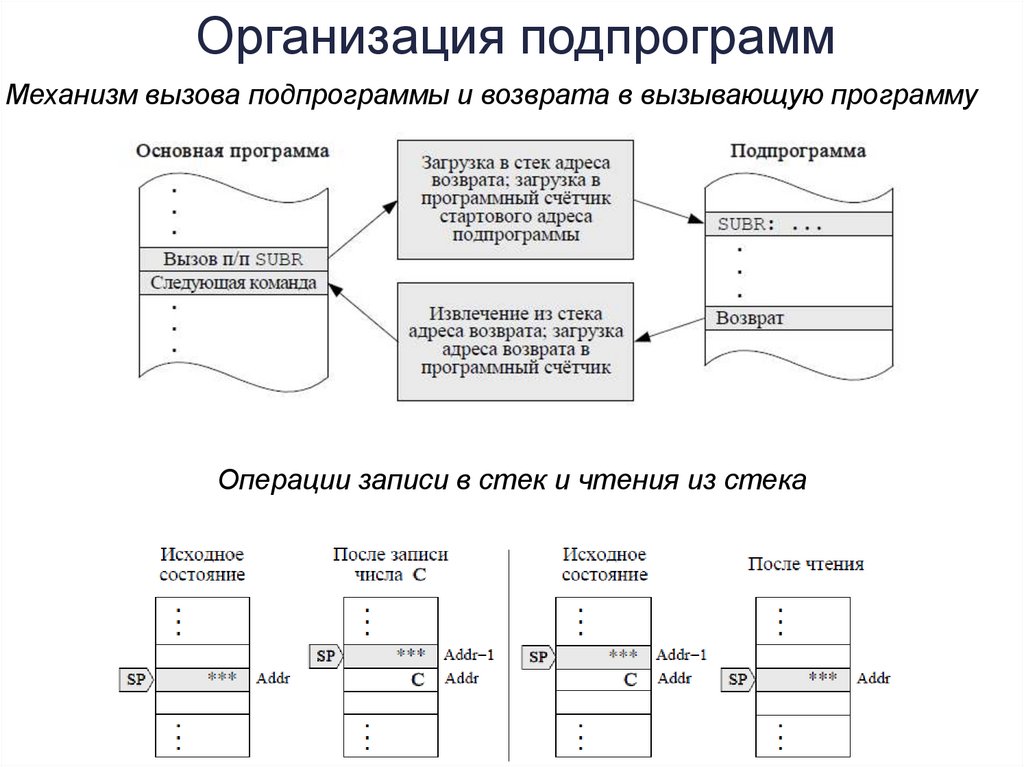
Организация подпрограммПоложение подпрограммы в общей структуре программы определяется по
её имени. Имя подпрограммы на ассемблере, задаваемое символической меткой,
является стартовым адресом исполняемой части подпрограммы.
Вызов подпрограммы подразумевает передачу в неё управления ходом выполнения команд. Передача управления осуществляется путём загрузки в программный счётчик (РС) стартового адреса подпрограммы. Для хранения адресов
возврата из подпрограмм используется стек (stack).
Стек – специальным образом организованная последовательность ячеек
памяти с дисциплиной обслуживания LIFO. При занесении в стек новых данных
предыдущие данные сохраняются («опускаются»). Выгружаются из стека
(«поднимаются») данные в обратном порядке. Программный стек (Software Stack)
организуется в оперативной памяти; глубина определяется размером и степенью
использования памяти.
Адрес очередной свободной ячейки стека содержится в специальном
регистре – указателе стека SP (Stack Pointer). При записи в стек число помещается
в ячейку с адресом, содержащимся в указателе стека, после чего содержимое
указателя стека уменьшается на единицу. При чтении из стека производится
выборка содержимого ячейки по адресу, на единицу большему содержимого
указателя стека.
77.
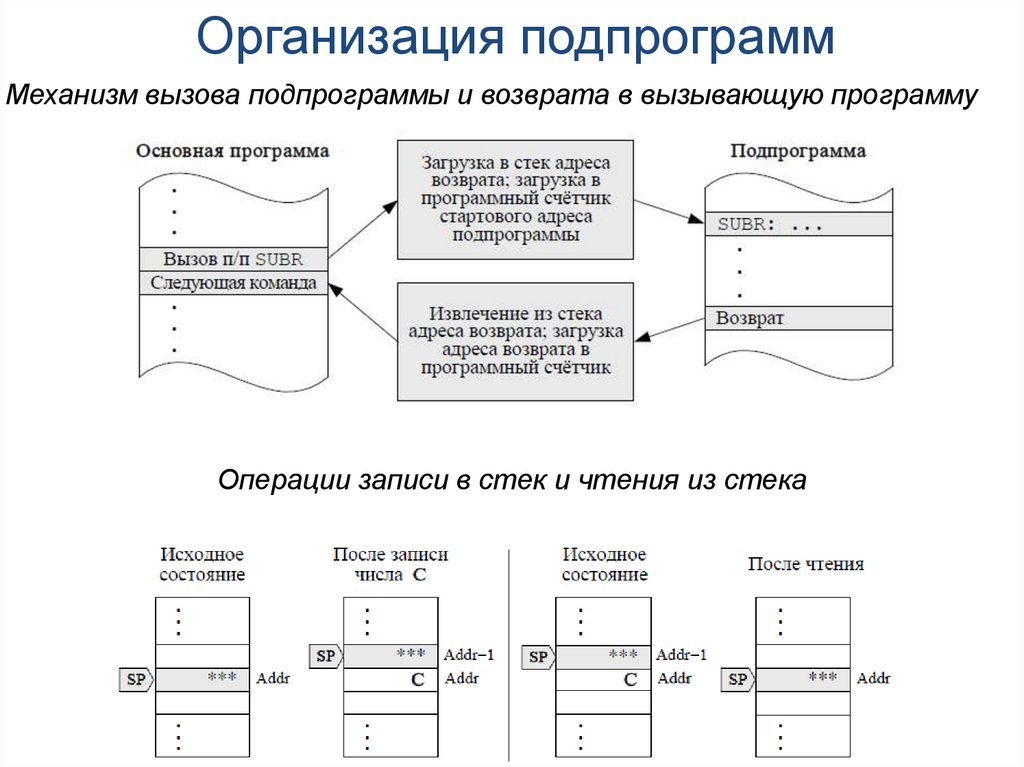
Организация подпрограммМеханизм вызова подпрограммы и возврата в вызывающую программу
Операции записи в стек и чтения из стека
78.
Организация подпрограммВызов
подпрограммы
на
языке
ассемблера
AVRмикроконтроллеров осуществляется командами RCALL, ICALL, CALL и
EICALL. Команда RCALL обеспечивает вызов подпрограммы, с помощью
относительной адресации памяти программ. Команда ICALL производит
косвенный вызов подпрограммы по адресу памяти программ,
содержащемуся в регистре-указателе Z. Команда CALL обеспечивает
вызов подпрограммы из памяти программ с использованием
непосредственной адресации. Команда EICALL позволяет выполнять
косвенный вызов подпрограмм из памяти. При выполнении команд RCALL,
ICALL, CALL и EICALL текущее значение программного счётчика заносится
в стек. Содержимое указателя стека (SPH:SPL) уменьшается на 2.
Для возврата из подпрограмм используется команда RET, при этом
адрес возврата загружается из стека в программный счётчик. При этом
содержимое указателя стека увеличивается на 2.
Стек может также использоваться для сохранения содержимого
РОН на время выполнения подпрограмм. Для сохранения в стеке и
извлечения из стека содержимого РОН служат команды PUSH и POP.
Команда PUSH заносит содержимое регистра в стек по адресу,
хранящемуся в указателе стека. Команда POP выполняет обратные
действия: значение указателя стека увеличивается на единицу.
79.
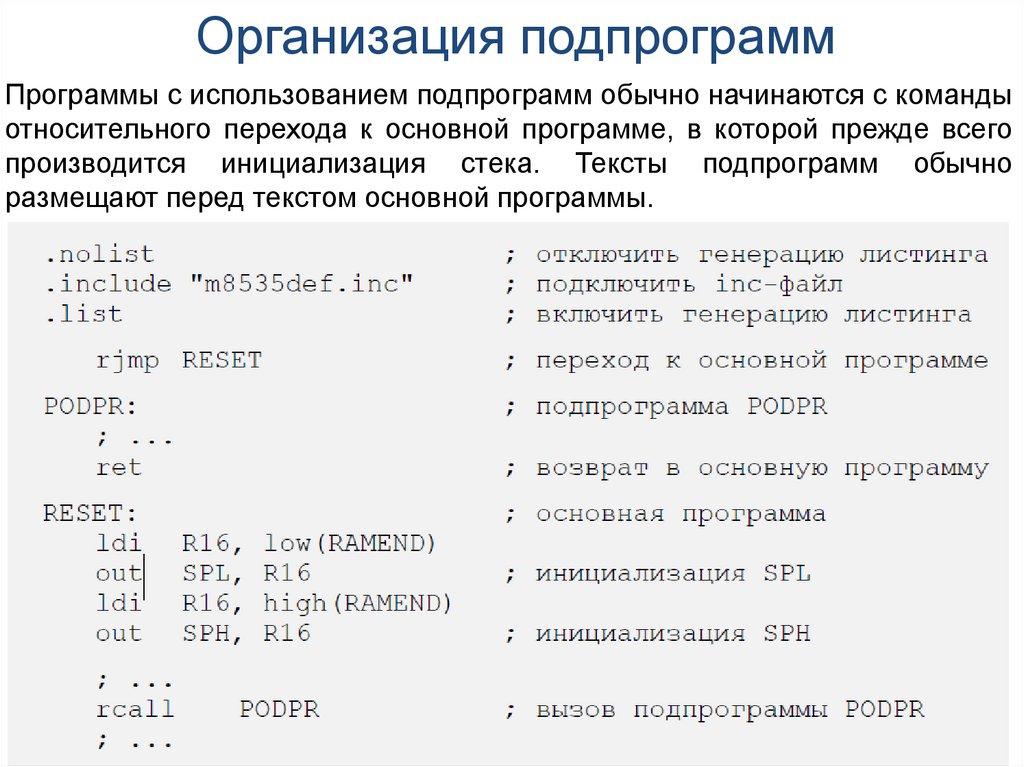
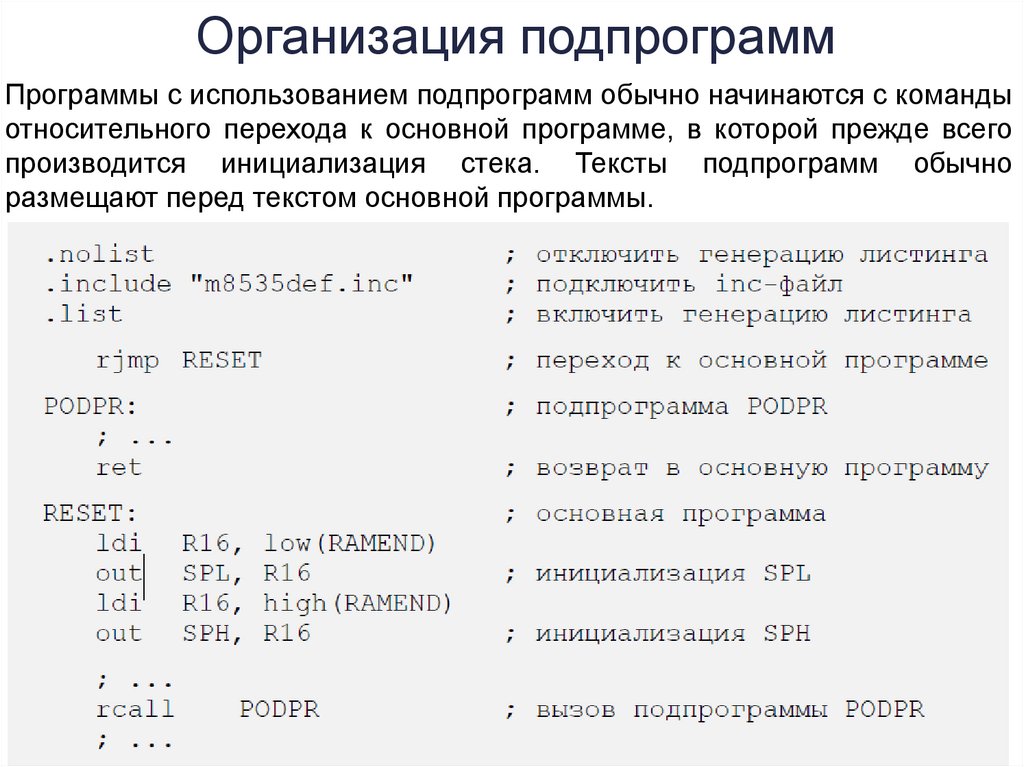
Организация подпрограммПрограммы с использованием подпрограмм обычно начинаются с команды
относительного перехода к основной программе, в которой прежде всего
производится инициализация стека. Тексты подпрограмм обычно
размещают перед текстом основной программы.
80.
Программирование микроконтроллеровЯзыком ассемблера называется язык программирования, в
котором каждой команде процессора или совокупности команд
процессора
соответствует
сокращённая
символическая
запись
(мнемоника). Использование символического обозначения команд, а
также адресов регистров и ячеек памяти, переменных, констант и других
элементов программы облегчает процесс составления программ.
Язык ассемблера обеспечивает возможность гибкого доступа ко
всем ресурсам программируемого микроконтроллера и позволяет
создавать программы, наиболее эффективные как по быстродействию,
так и по объёму занимаемой программной памяти. В этой связи
программирование на языке ассемблера предполагает знание
архитектуры и свойств микропроцессора. Языки ассемблера являются
машинно-ориентированными и, следовательно, отличаются для разных
типов микропроцессоров.
Языки высокого уровня (С, Паскаль, Бейсик и др.)
обеспечивают доступ ко всем ресурсам микроконтроллера, дают
возможность создавать хорошо структурированные программы, снимают
с программиста заботу о распределении памяти и содержат большой
набор библиотечных функций для выполнения стандартных операций.
81.
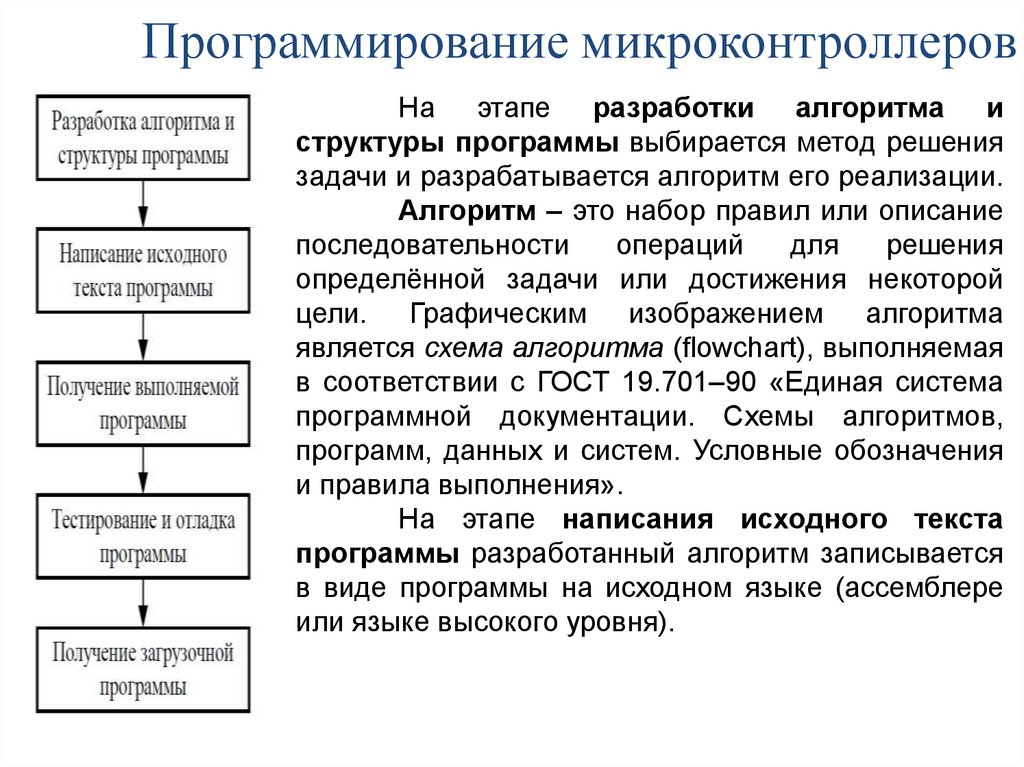
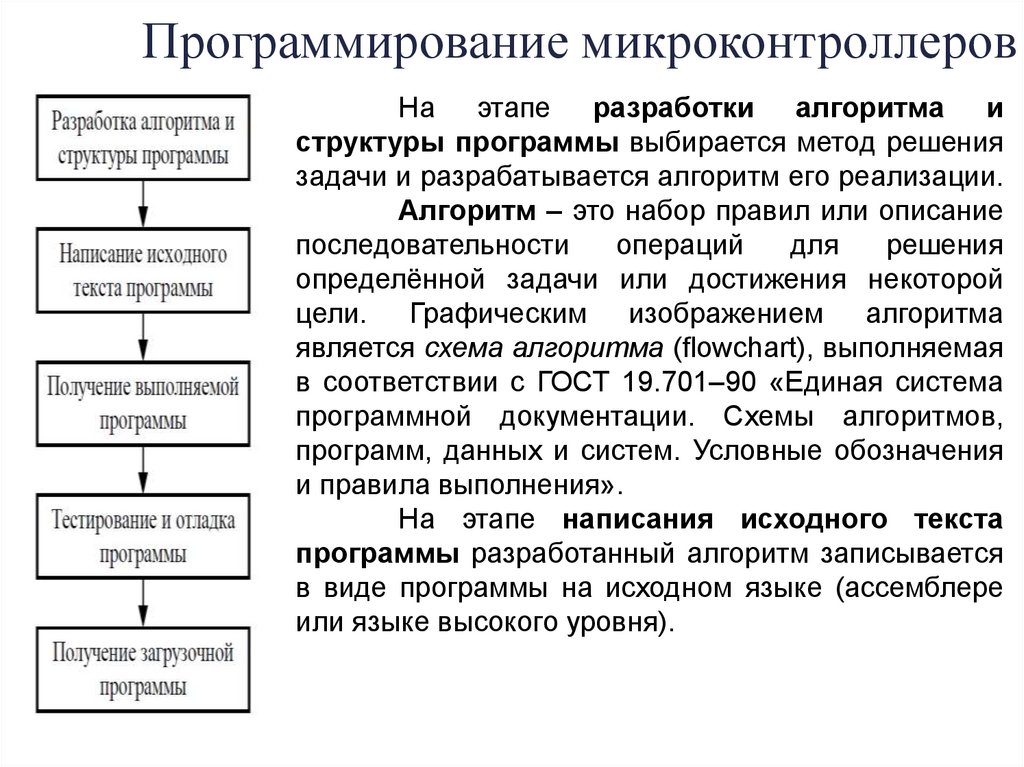
Программирование микроконтроллеровНа этапе разработки алгоритма и
структуры программы выбирается метод решения
задачи и разрабатывается алгоритм его реализации.
Алгоритм – это набор правил или описание
последовательности
операций
для
решения
определённой задачи или достижения некоторой
цели. Графическим изображением алгоритма
является схема алгоритма (flowchart), выполняемая
в соответствии с ГОСТ 19.701–90 «Единая система
программной документации. Схемы алгоритмов,
программ, данных и систем. Условные обозначения
и правила выполнения».
На этапе написания исходного текста
программы разработанный алгоритм записывается
в виде программы на исходном языке (ассемблере
или языке высокого уровня).
82.
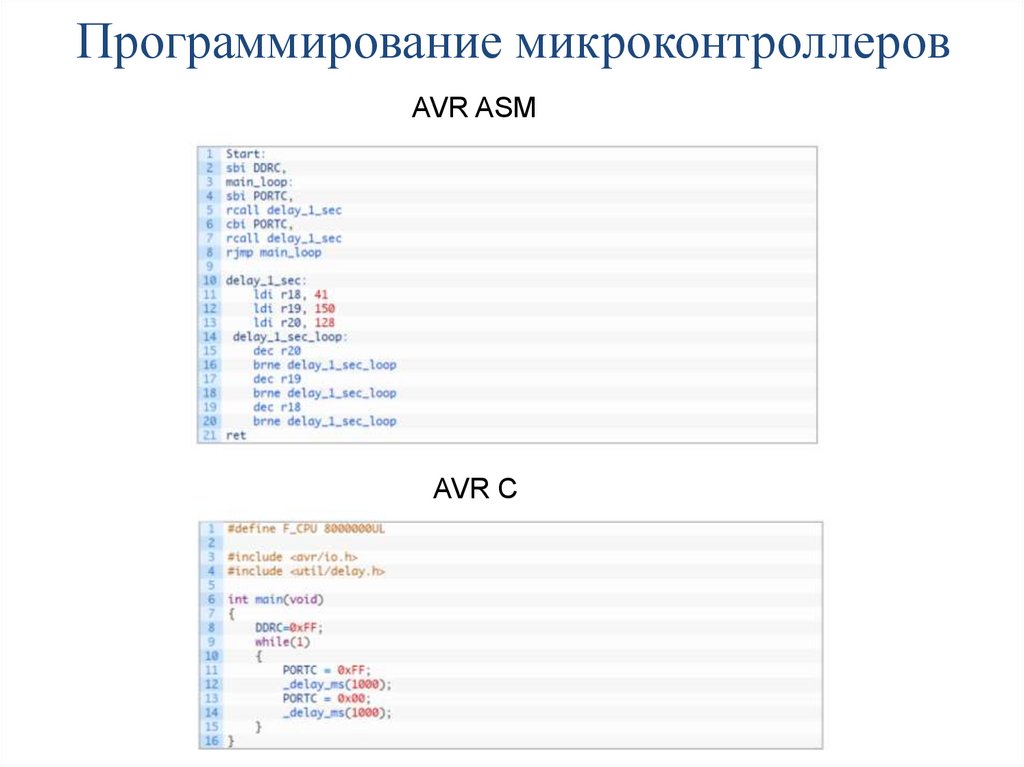
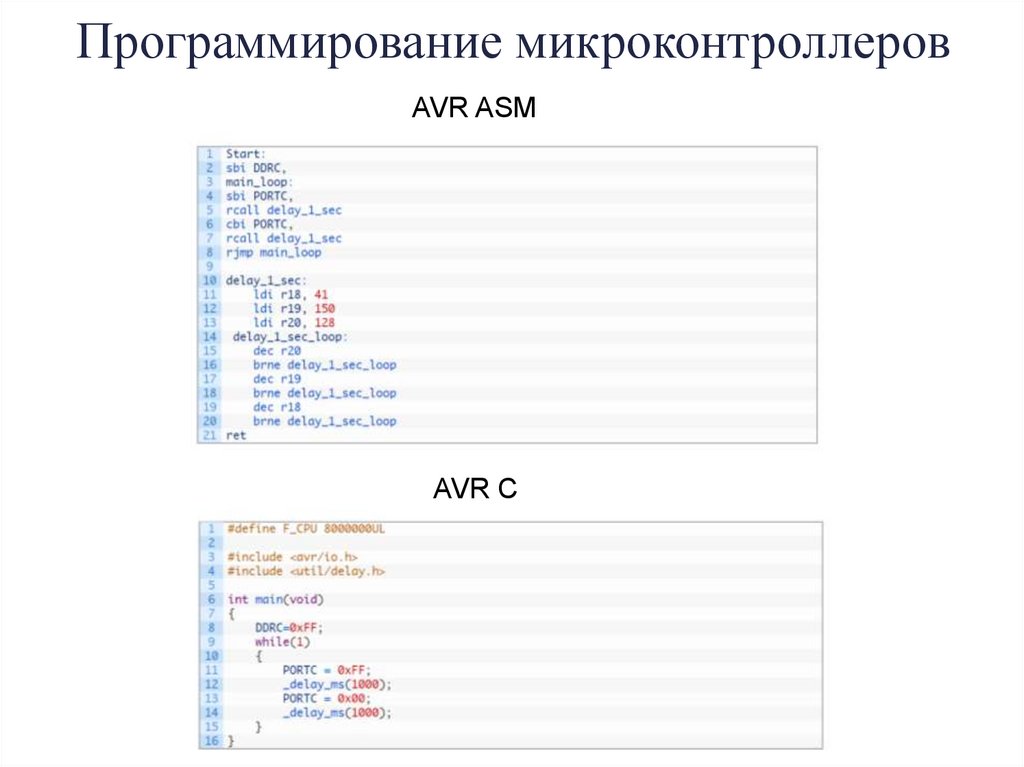
Программирование микроконтроллеровAVR ASM
AVR C
83.
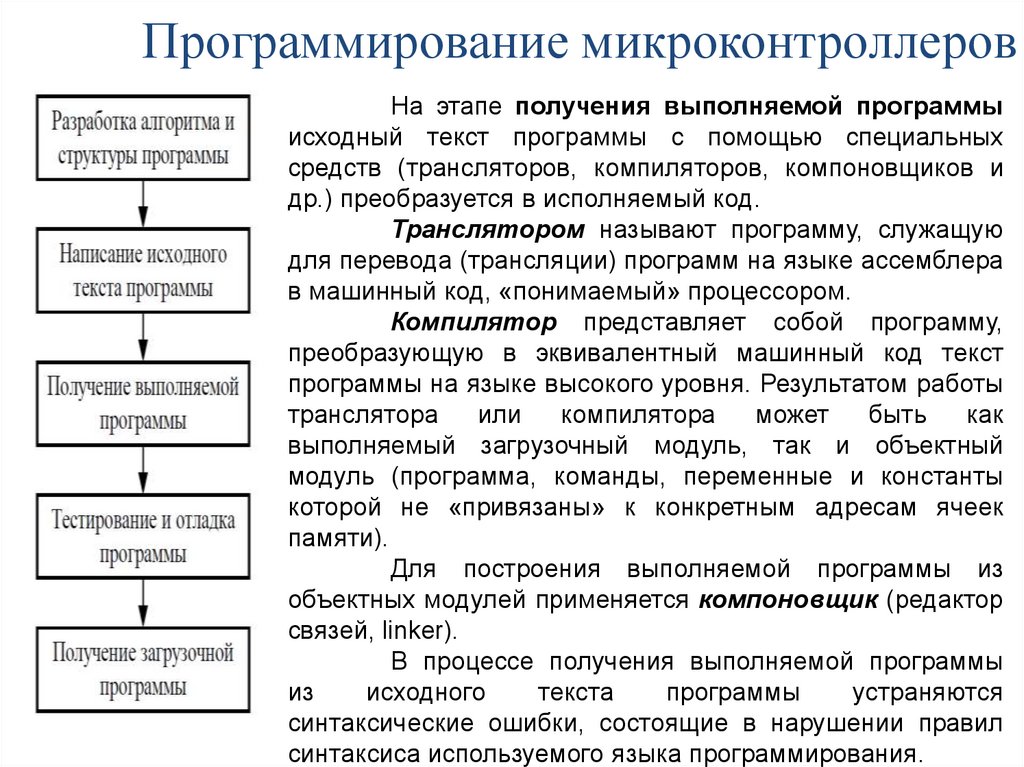
Программирование микроконтроллеровНа этапе получения выполняемой программы
исходный текст программы с помощью специальных
средств (трансляторов, компиляторов, компоновщиков и
др.) преобразуется в исполняемый код.
Транслятором называют программу, служащую
для перевода (трансляции) программ на языке ассемблера
в машинный код, «понимаемый» процессором.
Компилятор представляет собой программу,
преобразующую в эквивалентный машинный код текст
программы на языке высокого уровня. Результатом работы
транслятора
или
компилятора
может
быть
как
выполняемый загрузочный модуль, так и объектный
модуль (программа, команды, переменные и константы
которой не «привязаны» к конкретным адресам ячеек
памяти).
Для построения выполняемой программы из
объектных модулей применяется компоновщик (редактор
связей, linker).
В процессе получения выполняемой программы
из
исходного
текста
программы
устраняются
синтаксические ошибки, состоящие в нарушении правил
синтаксиса используемого языка программирования.
84.
Программирование микроконтроллеровТестирование служит для обнаружения в
программе ошибок.
После тестирования программа должна быть
подвергнута отладке (debug), задачей которой является
локализация ошибки, т. е. нахождение места в программе,
вызывающего ошибку.
На этапе получения загрузочной программы
производится «освобождение» программы от лишних
фрагментов, использовавшихся для тестирования и
отладки. Далее полученная загрузочная программа
заносится в память микроконтроллера.
По
завершении
процесса
разработки
производится документирование, т. е. составление
комплекта документов, необходимых для эксплуатации и
сопровождения программы. Сопровождение программы
(program maintenance) – это процесс внесения изменений,
исправления
оставшихся
ошибок
и
проведения
консультаций по программе, находящейся в эксплуатации.
Виды программных документов регламентированы ГОСТ
19.101–77 «Единая система программной документации.
Виды программ и программных документов».
85.
Работа в среде AVR StudioAVR Studio содержит:
• редактор исходных текстов,
• транслятор с языка ассемблера,
• отладчик-симулятор.
Транслятор работает с исходными программами на языке ассемблера,
содержащими метки, директивы, команды и комментарии.
Директивы являются инструкциями для транслятора и не заносятся в
исполняемый код программы.
Метка представляет собой символическое обозначение адреса
(последовательность символов, заканчивающаяся двоеточием). Метки
используются для указания места в программе, в которое передаётся
управление при переходах, а также для задания имён переменных.
Команды записываются в программе в виде мнемонического
обозначения выполняемой операции и могут иметь один или несколько
операндов, т. е. аргументов, с которыми они вызываются.
Строка имеет вид
86.
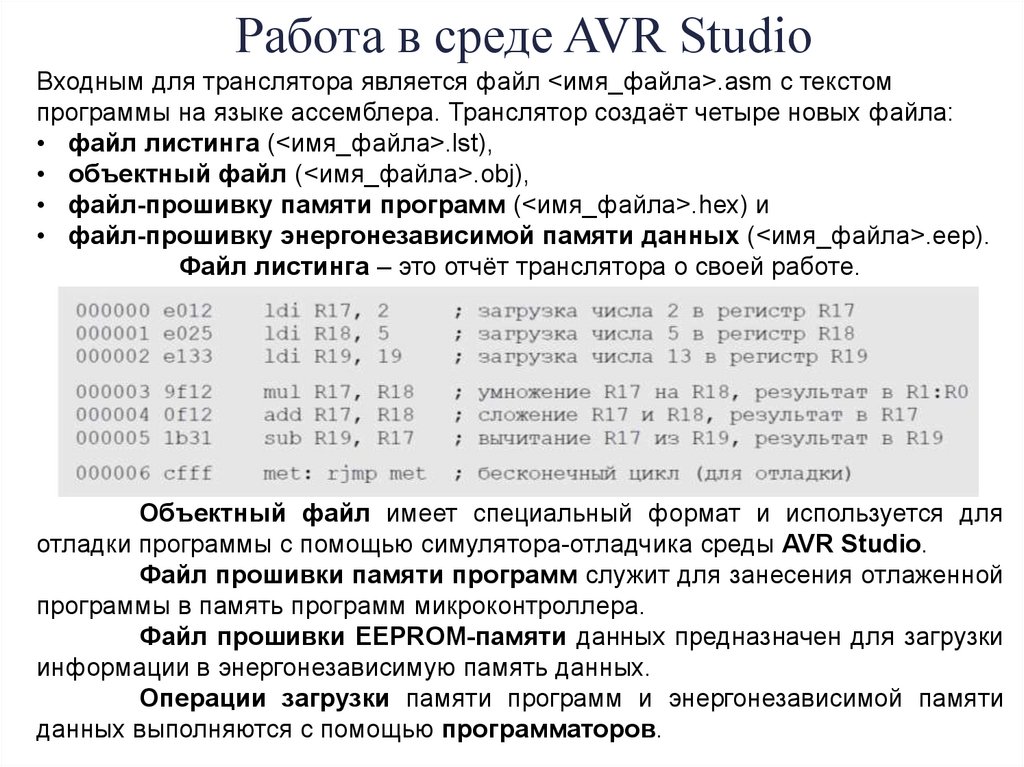
Работа в среде AVR StudioВходным для транслятора является файл <имя_файла>.asm с текстом
программы на языке ассемблера. Транслятор создаёт четыре новых файла:
• файл листинга (<имя_файла>.lst),
• объектный файл (<имя_файла>.obj),
• файл-прошивку памяти программ (<имя_файла>.hex) и
• файл-прошивку энергонезависимой памяти данных (<имя_файла>.eep).
Файл листинга – это отчёт транслятора о своей работе.
Объектный файл имеет специальный формат и используется для
отладки программы с помощью симулятора-отладчика среды AVR Studio.
Файл прошивки памяти программ служит для занесения отлаженной
программы в память программ микроконтроллера.
Файл прошивки EEPROM-памяти данных предназначен для загрузки
информации в энергонезависимую память данных.
Операции загрузки памяти программ и энергонезависимой памяти
данных выполняются с помощью программаторов.
87.
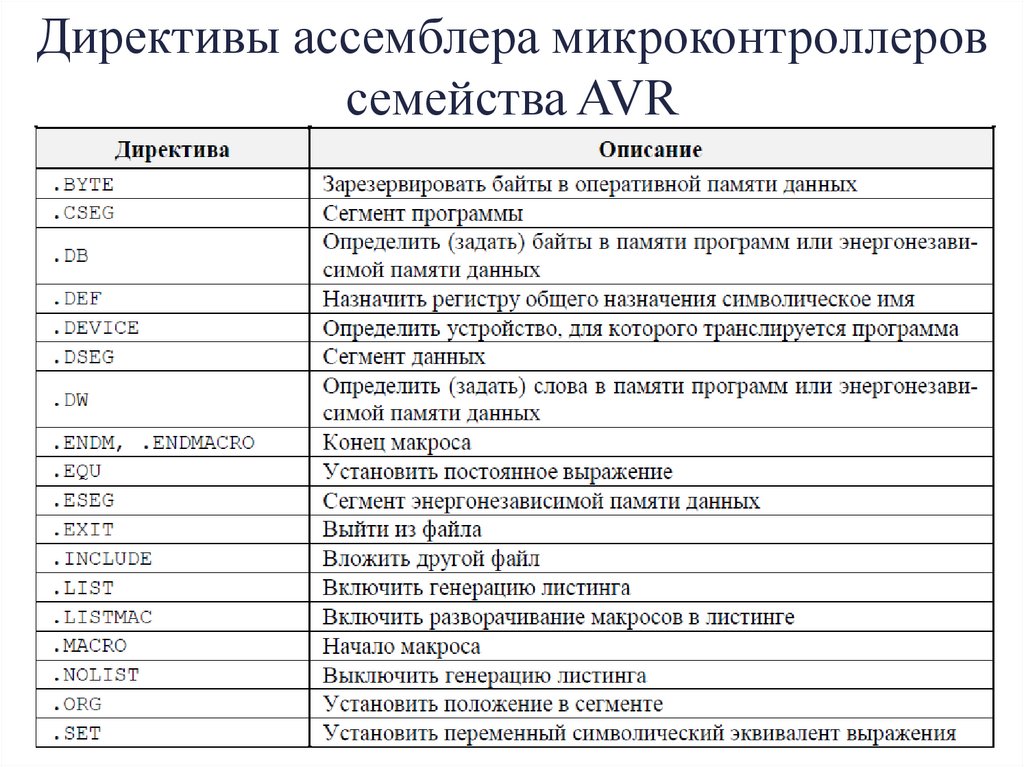
Директивы ассемблера микроконтроллеровсемейства AVR
88.
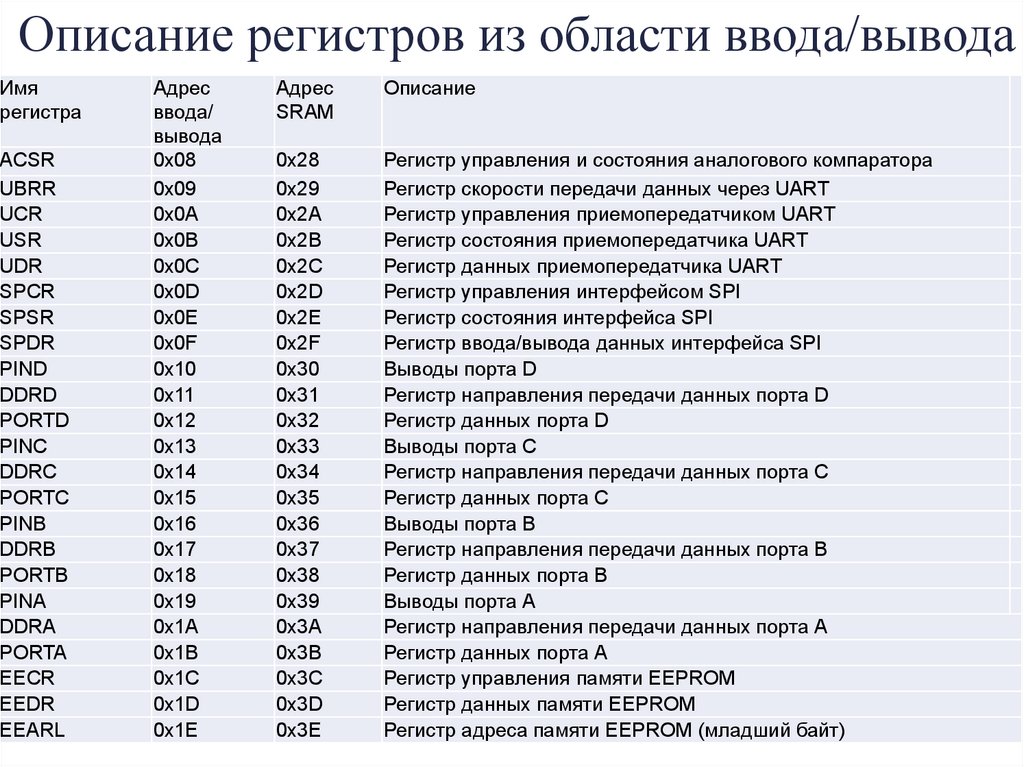
Описание регистров из области ввода/выводаИмя
регистра
ACSR
UBRR
UCR
USR
UDR
SPCR
SPSR
SPDR
PIND
DDRD
PORTD
PINC
DDRC
PORTC
PINB
DDRB
PORTB
PINA
DDRA
PORTA
EECR
EEDR
EEARL
Адрес
ввода/
вывода
0x08
0x09
0х0А
0x0В
0х0С
0x0D
0х0Е
0x0F
0x10
0x11
0x12
0x13
0x14
0x15
0x16
0x17
0x18
0x19
0x1А
0x1В
0x1С
0x1D
0x1Е
Адрес
SRAM
Описание
0x28
0x29
0х2А
0x2В
0х2С
0x2D
0х2Е
0x2F
0x30
0x31
0x32
0x33
0x34
0x35
0x36
0x37
0x38
0x39
0х3А
0х3В
0х3С
0x3D
0х3Е
Регистр управления и состояния аналогового компаратора
Регистр скорости передачи данных через UART
Регистр управления приемопередатчиком UART
Регистр состояния приемопередатчика UART
Регистр данных приемопередатчика UART
Регистр управления интерфейсом SPI
Регистр состояния интерфейса SPI
Регистр ввода/вывода данных интерфейса SPI
Выводы порта D
Регистр направления передачи данных порта D
Регистр данных порта D
Выводы порта С
Регистр направления передачи данных порта С
Регистр данных порта С
Выводы порта В
Регистр направления передачи данных порта В
Регистр данных порта В
Выводы порта А
Регистр направления передачи данных порта А
Регистр данных порта А
Регистр управления памяти EEPROM
Регистр данных памяти EEPROM
Регистр адреса памяти EEPROM (младший байт)
89.
Описание регистров из области ввода/выводаEEARH
0x1F
0x3F
Регистр адреса памяти EEPROM (старший байт)
WDTCR
0x21
0x41
Регистр управления сторожевым таймером
ICR1L
0x24
0x44
Регистр захвата таймера/счетчика Т/С1 (младший байт)
ICR1H
0x25
0x45
Регистр захвата таймера/счетчика Т/С1 (младший байт)
OCR1BL
0x28
0x48
Регистр сравнения В таймера Т/С1 (младший байт)
OCR1BH
0x29
0x49
Регистр сравнения В таймера Т/С1 (старший байт)
OCR1AL
0х2А
0х4А
Регистр сравнения А таймера Т/С1 (младший байт)
OCR1AH
0x2В
0x4В
Регистр сравнения А таймера Т/С1 (старший байт)
TCNT1L
0х2С
0х4С
Счетный регистр таймера/счетчика Т/С1 (младший байт)
TCNT1H
0x2D
0x4D
Счетный регистр таймера/счетчика Т/С1 (старший байт)
TCCR1B
0x2Е
0х4Е
Регистр управления В таймера/счетчика Т/С1
TCCR1A
0x2F
0x4F
Регистр управления А таймера/счетчика Т/С1
TCNT0
0x32
0x52
Счетный регистр таймера/счетчика Т/С0
TCCR0
0x33
0x53
Регистр управления таймера/счетчика Т/С0
MCUCR
0x35
0x55
Регистр управления микроконтроллером
TIFR
0x38
0x58
Регистр флагов прерываний от таймеров/счетчиков
TIMSK
0x39
0x59
Регистр маскирования прерываний от таймеров
GIFR
0х3А
0х5А
Общий регистр флагов прерываний
GIMSK
0х3В
0x5В
Общий регистр маскирования прерываний
SPL
0x3D
0x5D
Указатель стека (младший байт)
SPH
0х3Е
0х5Е
Указатель стека (старший байт)
SREG
0x3F
0x5F
Регистр состояния
90.
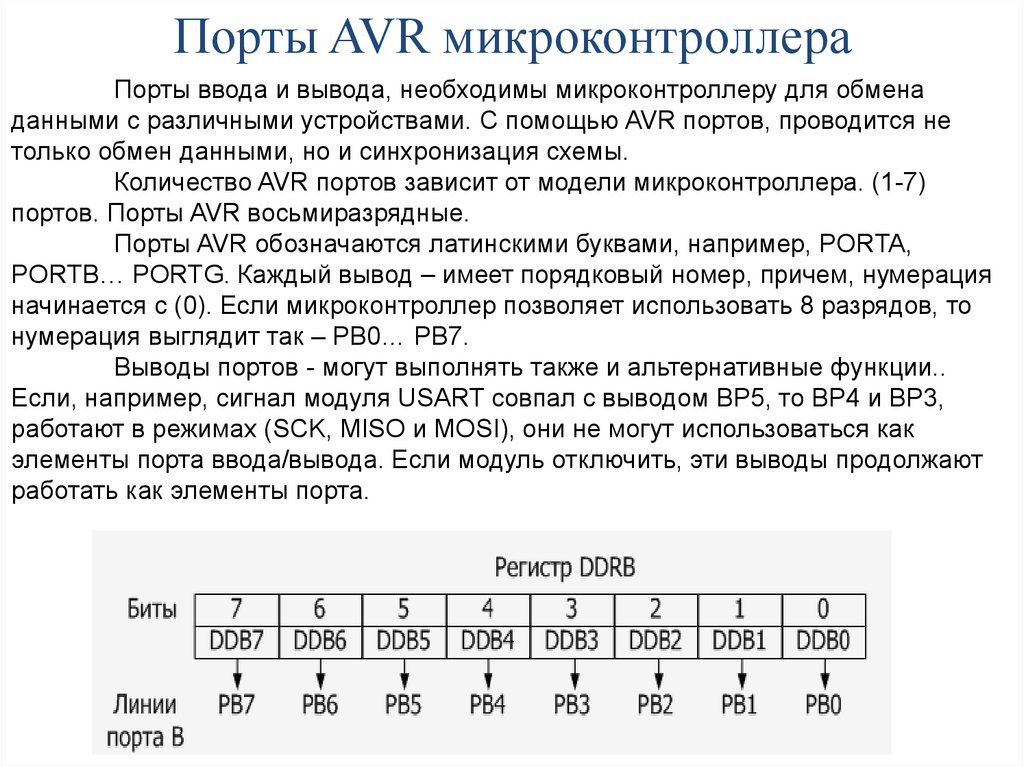
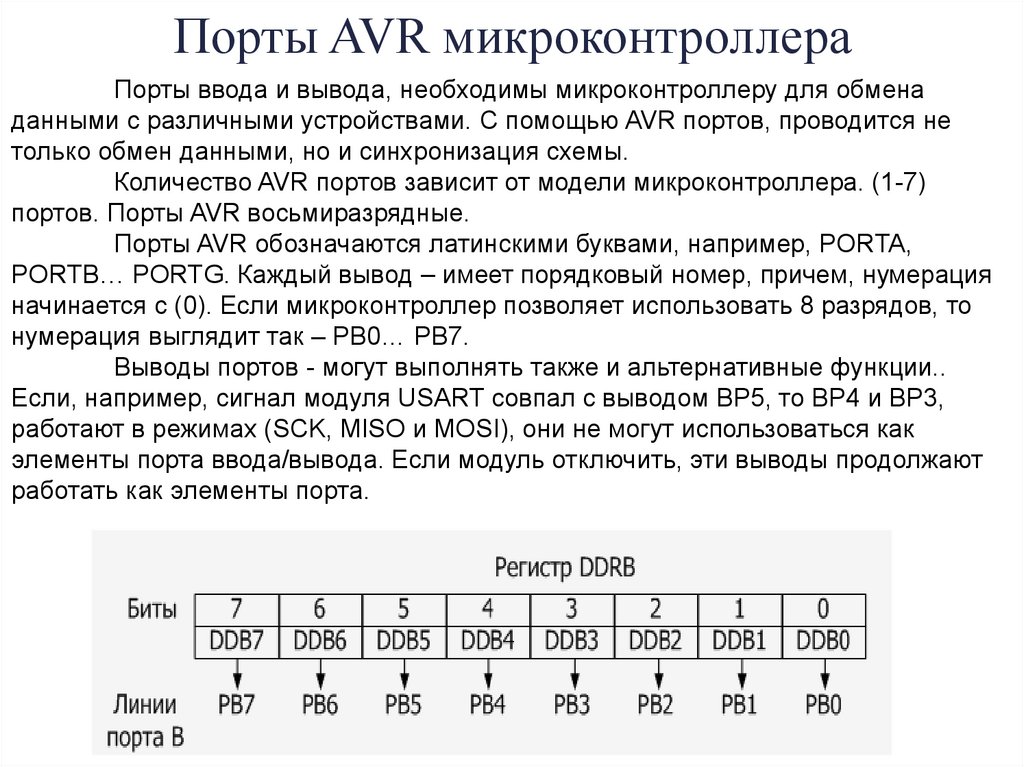
Порты AVR микроконтроллераПорты ввода и вывода, необходимы микроконтроллеру для обмена
данными с различными устройствами. С помощью AVR портов, проводится не
только обмен данными, но и синхронизация схемы.
Количество AVR портов зависит от модели микроконтроллера. (1-7)
портов. Порты AVR восьмиразрядные.
Порты AVR обозначаются латинскими буквами, например, PORTA,
PORTB… PORTG. Каждый вывод – имеет порядковый номер, причем, нумерация
начинается с (0). Если микроконтроллер позволяет использовать 8 разрядов, то
нумерация выглядит так – PB0… PB7.
Выводы портов - могут выполнять также и альтернативные функции..
Если, например, сигнал модуля USART совпал с выводом BP5, то BP4 и BP3,
работают в режимах (SCK, MISO и MOSI), они не могут использоваться как
элементы порта ввода/вывода. Если модуль отключить, эти выводы продолжают
работать как элементы порта.
91.
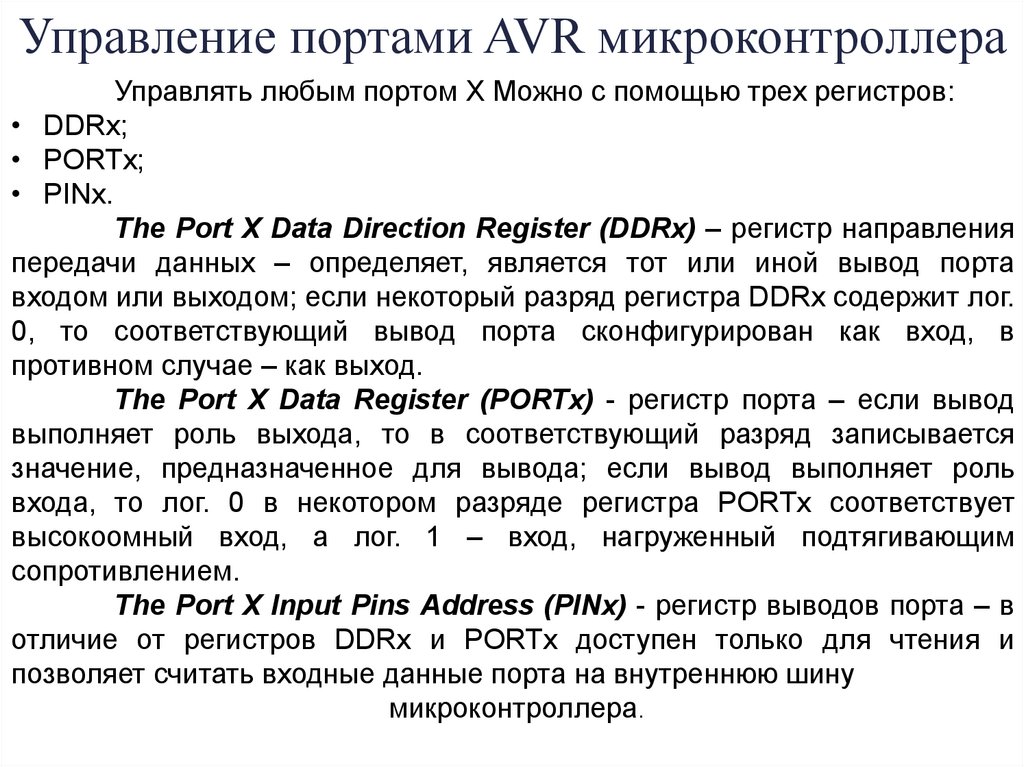
Управление портами AVR микроконтроллераУправлять любым портом X Можно с помощью трех регистров:
• DDRx;
• PORTx;
• PINx.
The Port X Data Direction Register (DDRx) – регистр направления
передачи данных – определяет, является тот или иной вывод порта
входом или выходом; если некоторый разряд регистра DDRx содержит лог.
0, то соответствующий вывод порта сконфигурирован как вход, в
противном случае – как выход.
The Port X Data Register (PORTx) - регистр порта – если вывод
выполняет роль выхода, то в соответствующий разряд записывается
значение, предназначенное для вывода; если вывод выполняет роль
входа, то лог. 0 в некотором разряде регистра PORTx соответствует
высокоомный вход, а лог. 1 – вход, нагруженный подтягивающим
сопротивлением.
The Port X Input Pins Address (PINx) - регистр выводов порта – в
отличие от регистров DDRx и PORTx доступен только для чтения и
позволяет считать входные данные порта на внутреннюю шину
микроконтроллера.
92.
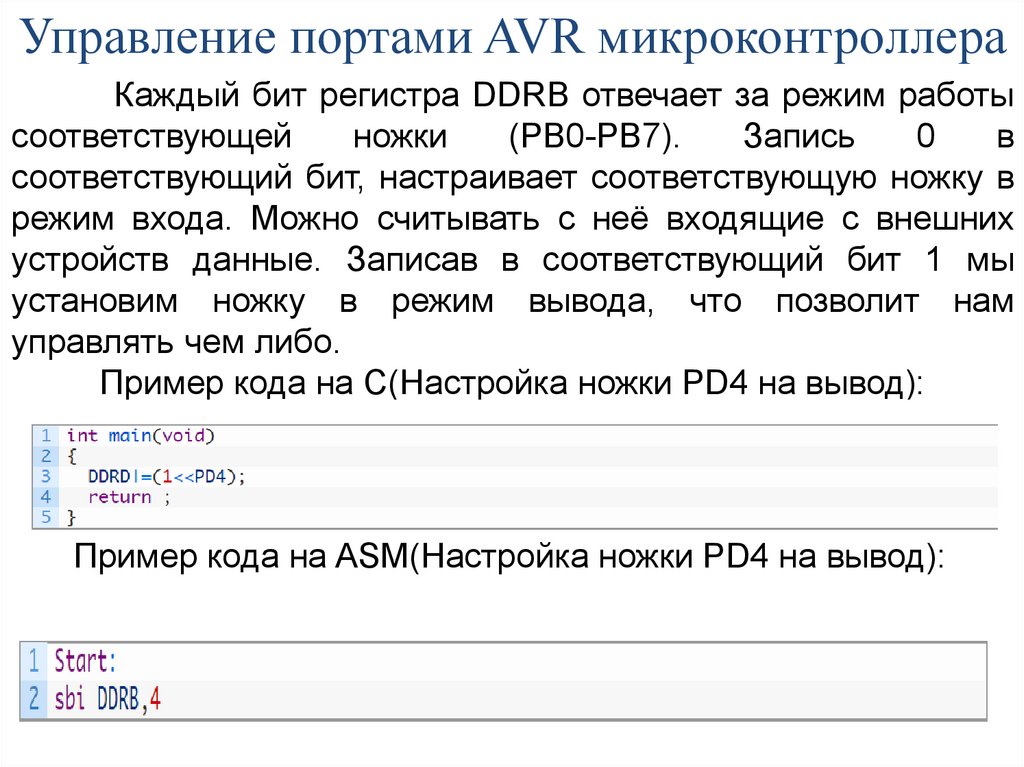
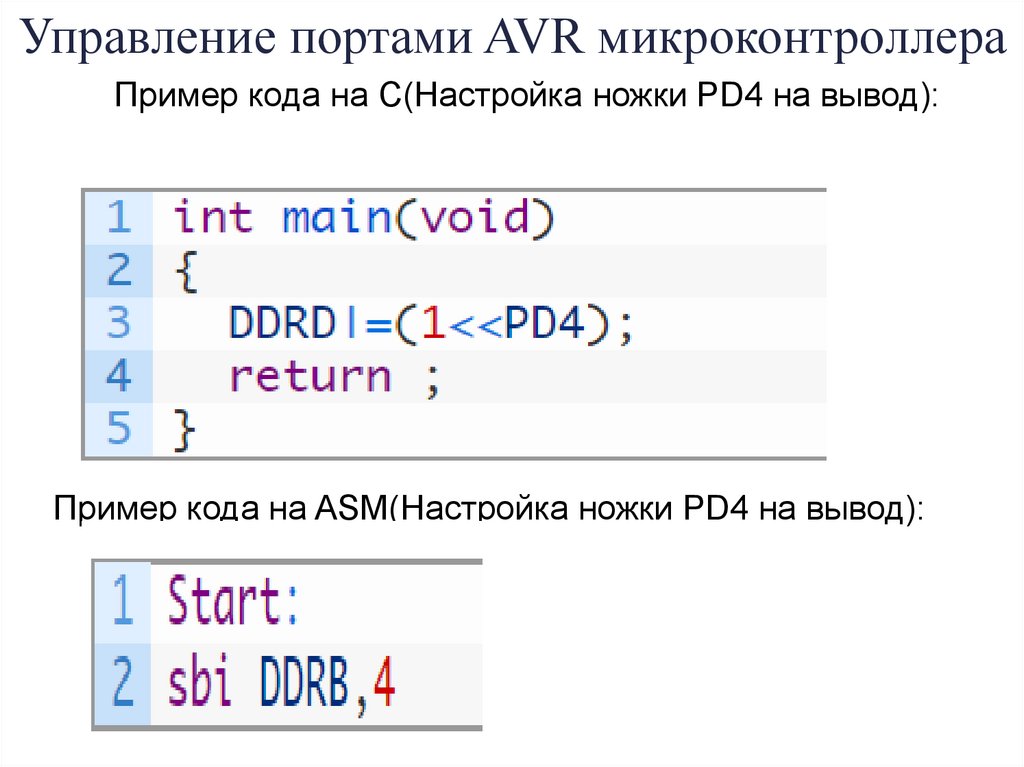
Управление портами AVR микроконтроллераКаждый бит регистра DDRB отвечает за режим работы
соответствующей
ножки
(PB0-PB7).
Запись
0
в
соответствующий бит, настраивает соответствующую ножку в
режим входа. Можно считывать с неё входящие с внешних
устройств данные. Записав в соответствующий бит 1 мы
установим ножку в режим вывода, что позволит нам
управлять чем либо.
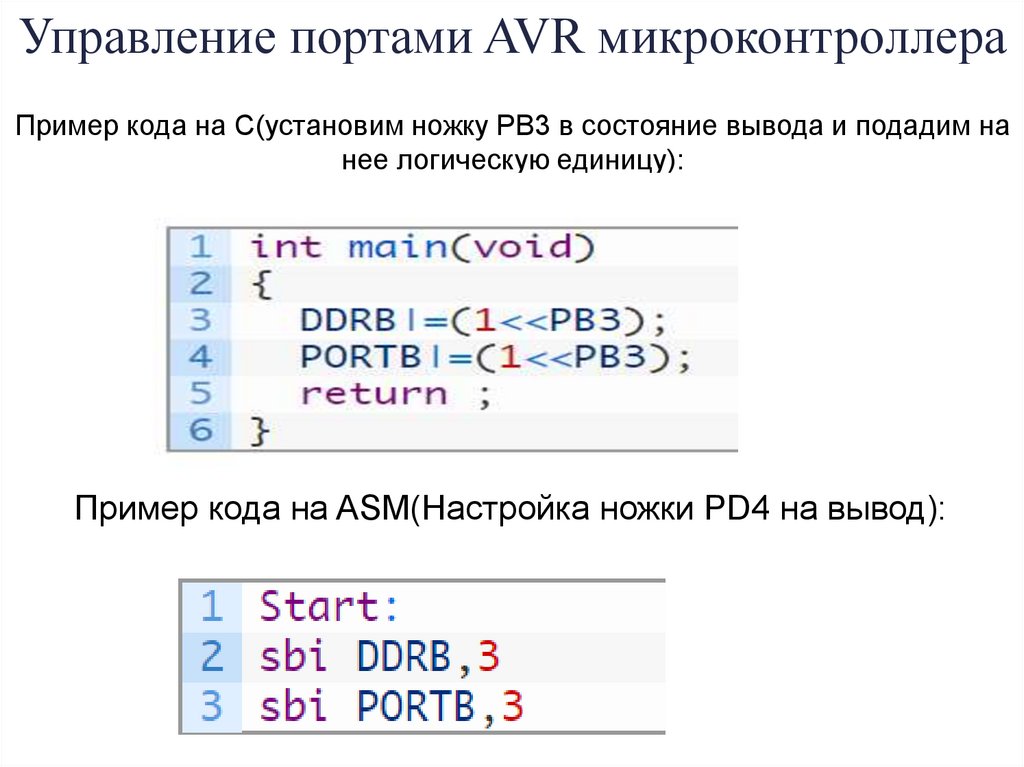
Пример кода на C(Настройка ножки PD4 на вывод):
Пример кода на ASM(Настройка ножки PD4 на вывод):
93.
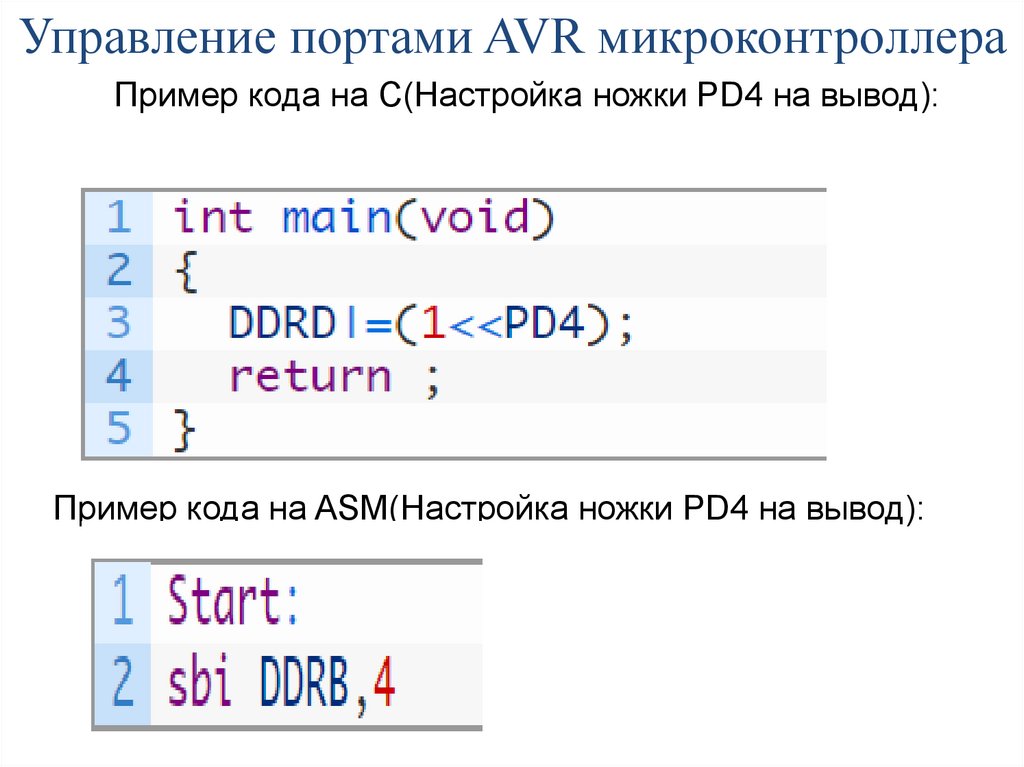
Управление портами AVR микроконтроллераПример кода на C(Настройка ножки PD4 на вывод):
Пример кода на ASM(Настройка ножки PD4 на вывод):
94.
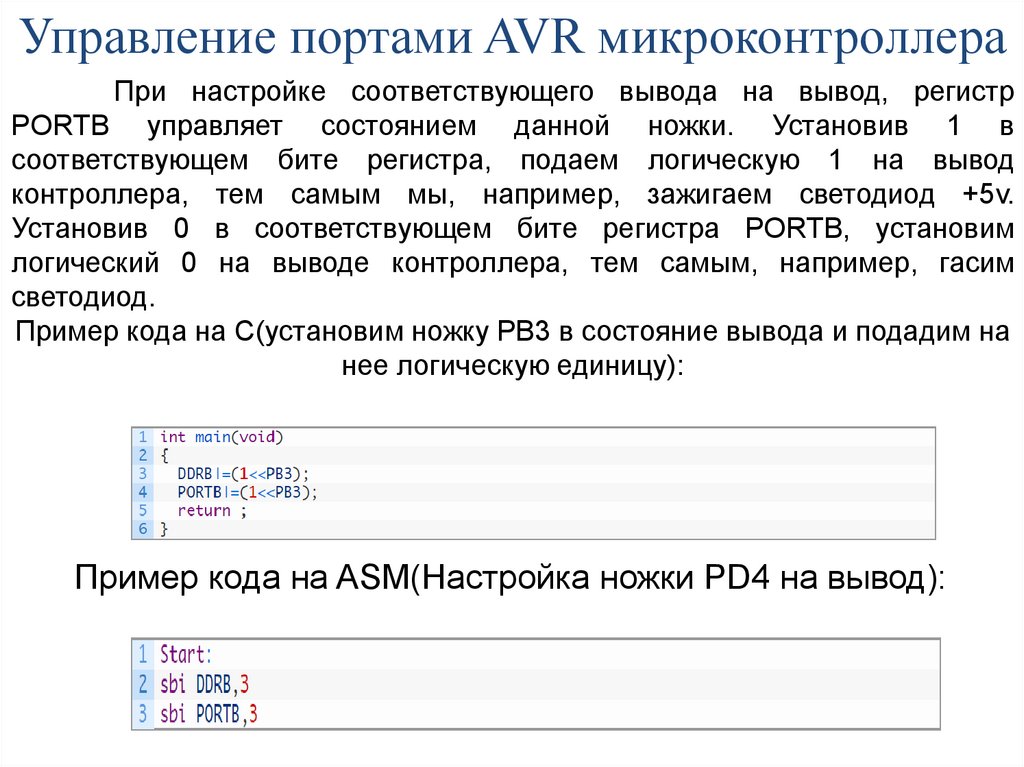
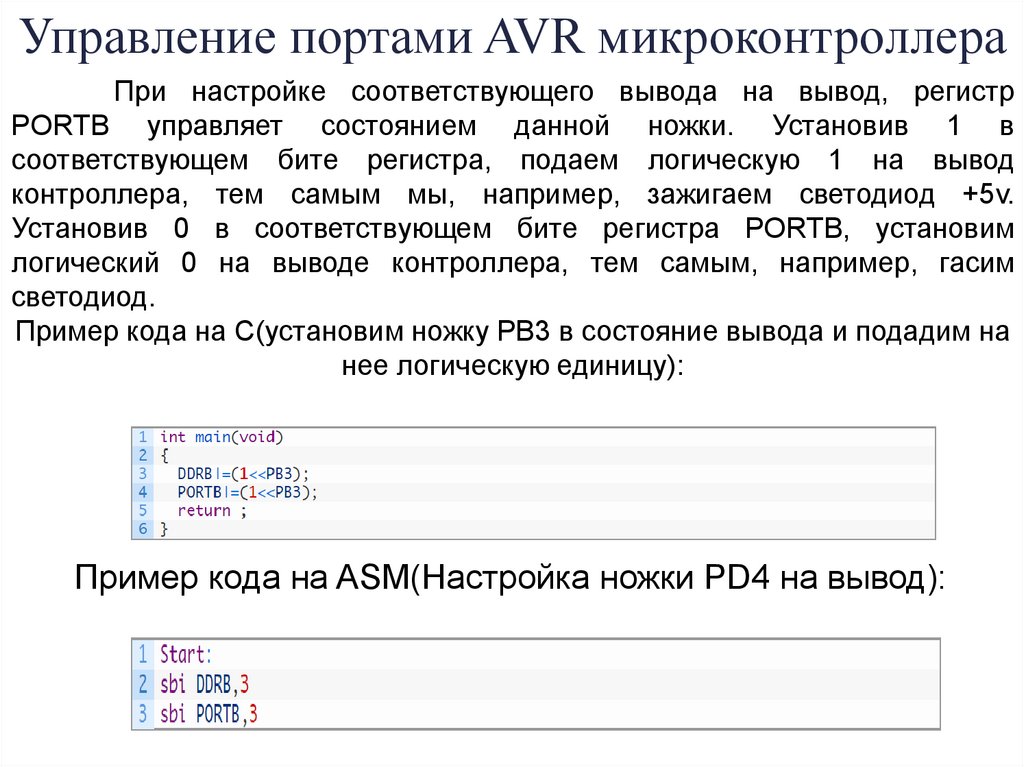
Управление портами AVR микроконтроллераПри настройке соответствующего вывода на вывод, регистр
PORTB управляет состоянием данной ножки. Установив 1 в
соответствующем бите регистра, подаем логическую 1 на вывод
контроллера, тем самым мы, например, зажигаем светодиод +5v.
Установив 0 в соответствующем бите регистра PORTB, установим
логический 0 на выводе контроллера, тем самым, например, гасим
светодиод.
Пример кода на C(установим ножку PB3 в состояние вывода и подадим на
нее логическую единицу):
Пример кода на ASM(Настройка ножки PD4 на вывод):
95.
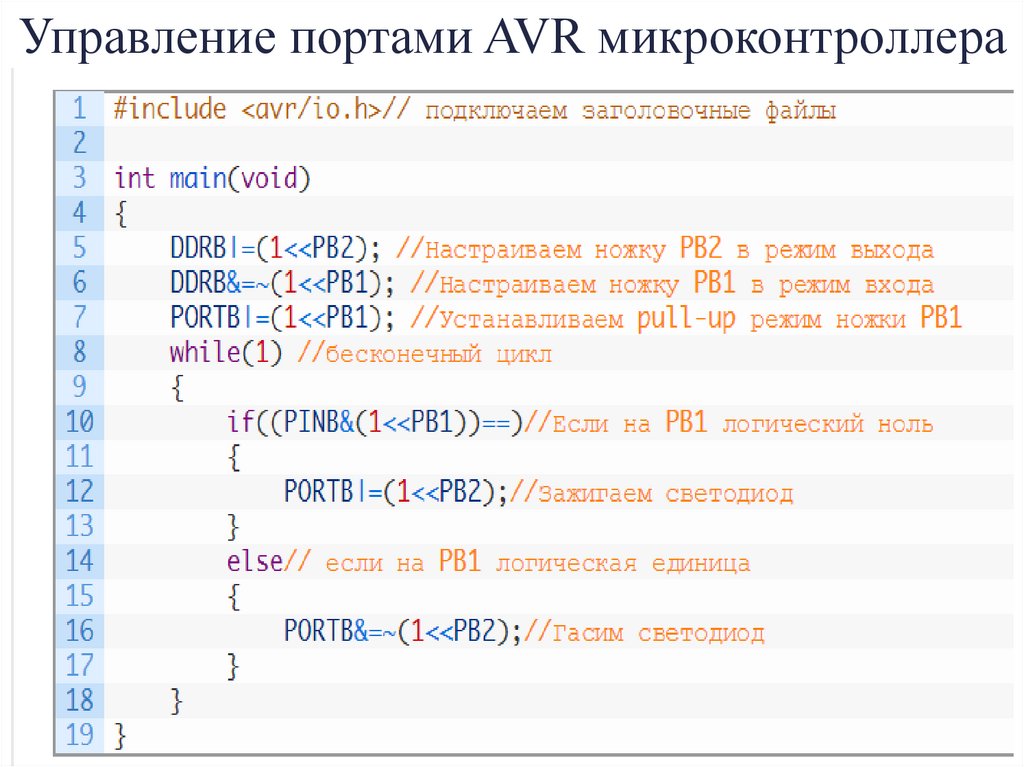
Управление портами AVR микроконтроллераПример кода на C(установим ножку PB3 в состояние вывода и подадим на
нее логическую единицу):
Пример кода на ASM(Настройка ножки PD4 на вывод):
96.
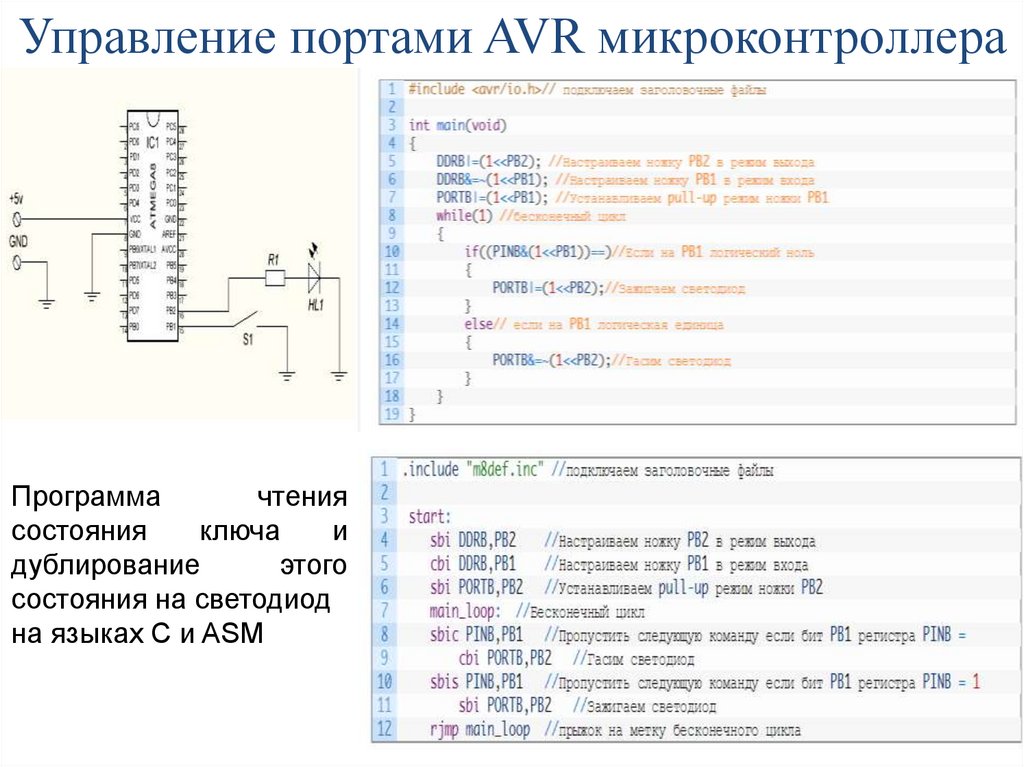
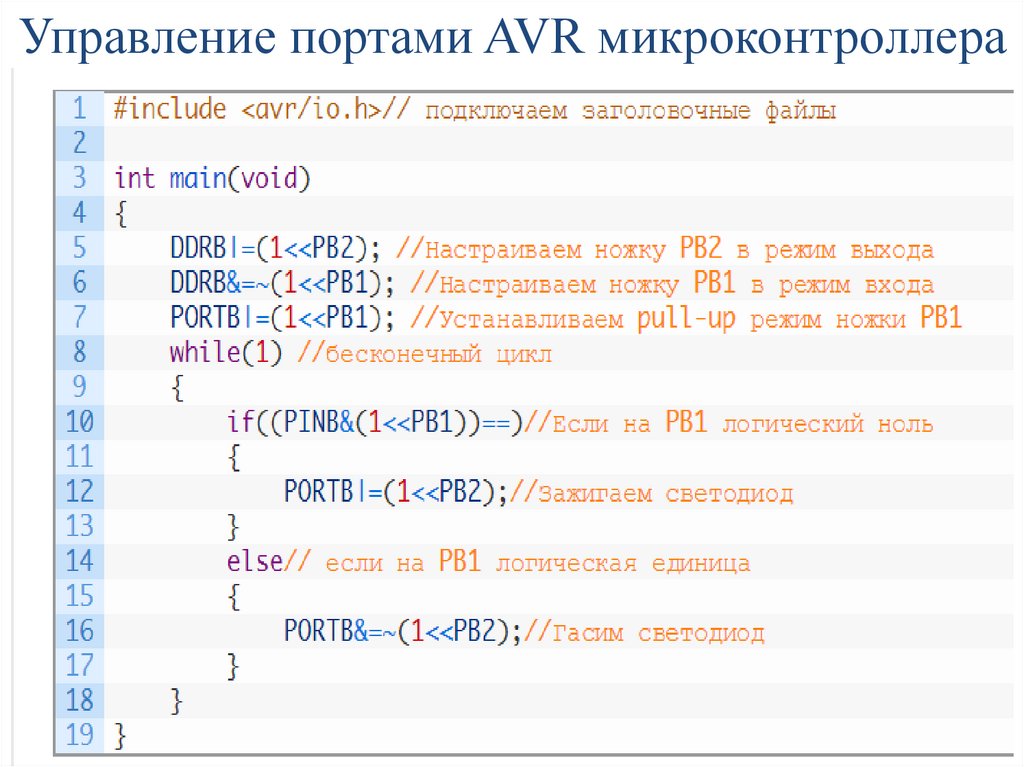
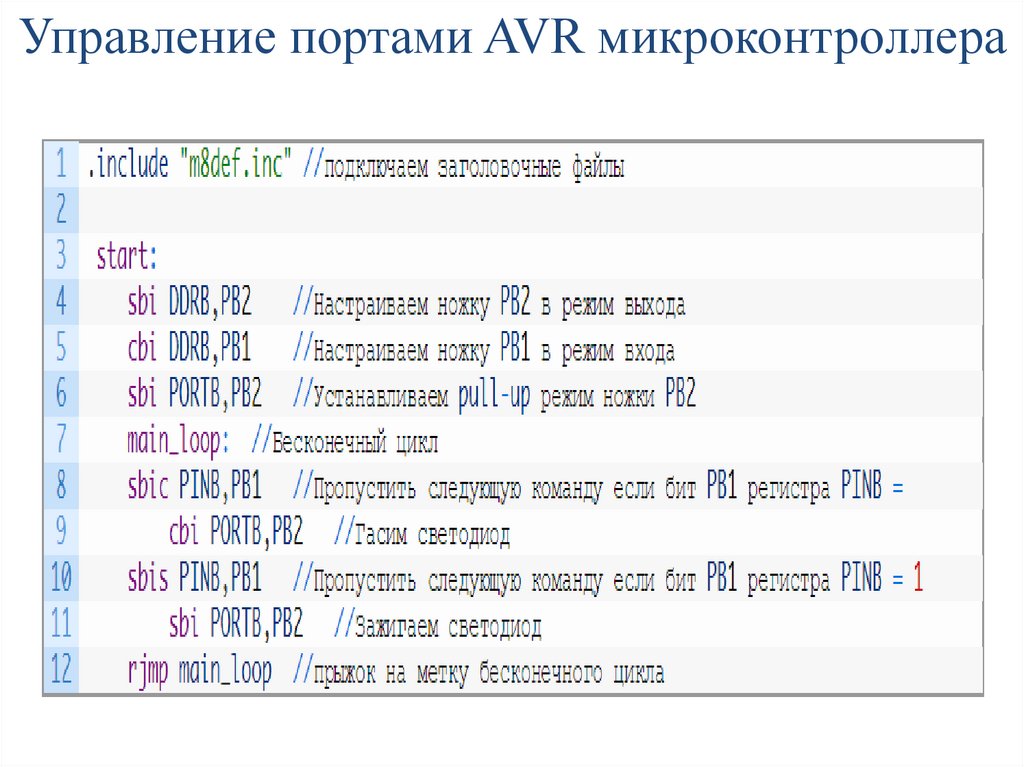
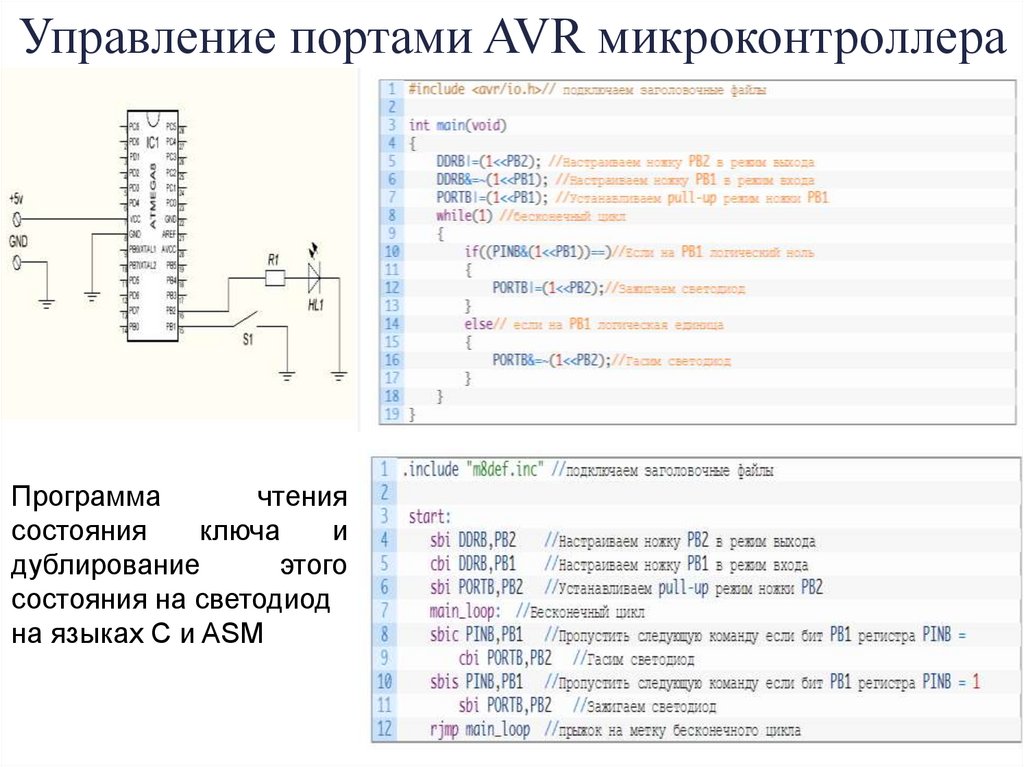
Управление портами AVR микроконтроллераПрограмма
чтения
состояния
ключа
и
дублирование
этого
состояния на светодиод
на языках С и ASM
97.
Управление портами AVR микроконтроллера98.
Управление портами AVR микроконтроллера99.
16-ти разрядный таймер/счетчик Т/С1Регистры Т/С1
TCNT1 – счетный регистр (содержимое счетчика);
TCCR1А – регистр управления для определения реакции
выводов
ОС1А/ОС1 – регистры сравнения, используются для
определения совпадения состояния счетчика в регистре TCNT1 с
регистрами сравнения OCR1A/OCR1B, а также для выбора режима
широтно-импульсной модуляции;
TCCR1B – регистр управления для настройки делителя
частоты, для разрешения подачи сигнала сброса для регистра
TCNT1 и для управления захватом;
ICR1 – регистр захвата по входу (при появлении на выводе
ICP фронта входного сигнала, определенного как активный,
текущее состояние счетчика будет перенесено в этот регистр);
OCR1A, OCR1B – регистры сравнения; их содержимое
постоянно сравнивается с состоянием счетчика. В случае
совпадения выполняются действия, определенные регистром
TCCR1A.
100.
16-ти разрядный таймер/счетчик Т/С1Регистры Т/С1
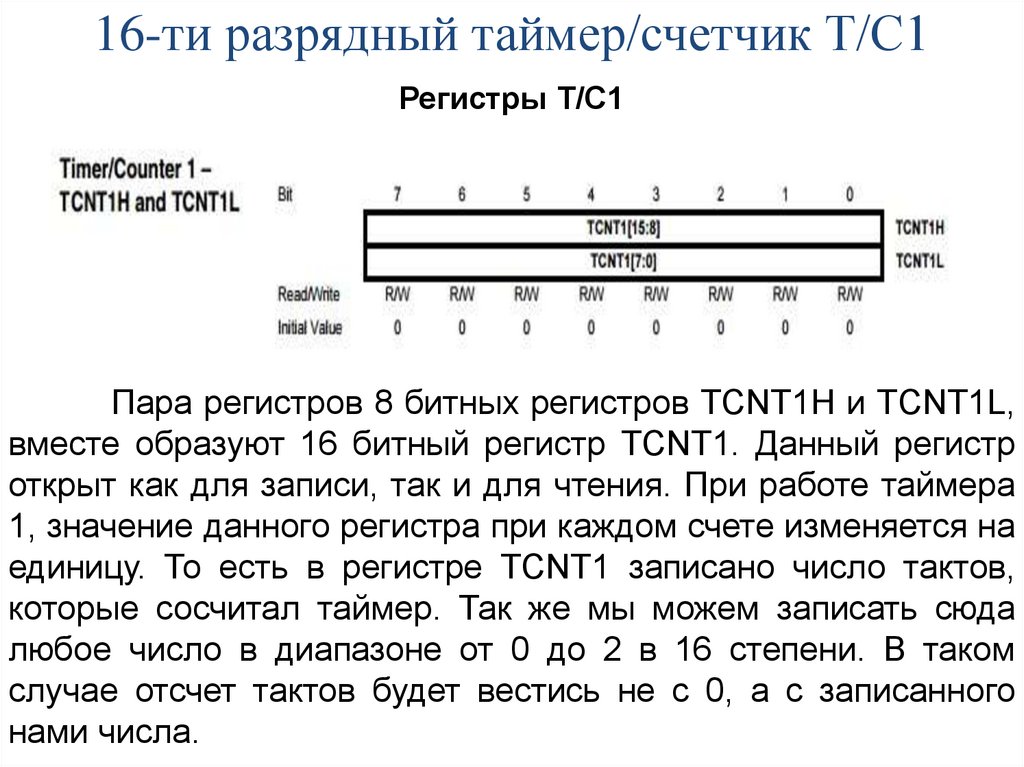
Пара регистров 8 битных регистров TCNT1H и TCNT1L,
вместе образуют 16 битный регистр TCNT1. Данный регистр
открыт как для записи, так и для чтения. При работе таймера
1, значение данного регистра при каждом счете изменяется на
единицу. То есть в регистре TCNT1 записано число тактов,
которые сосчитал таймер. Так же мы можем записать сюда
любое число в диапазоне от 0 до 2 в 16 степени. В таком
случае отсчет тактов будет вестись не с 0, а с записанного
нами числа.
101.
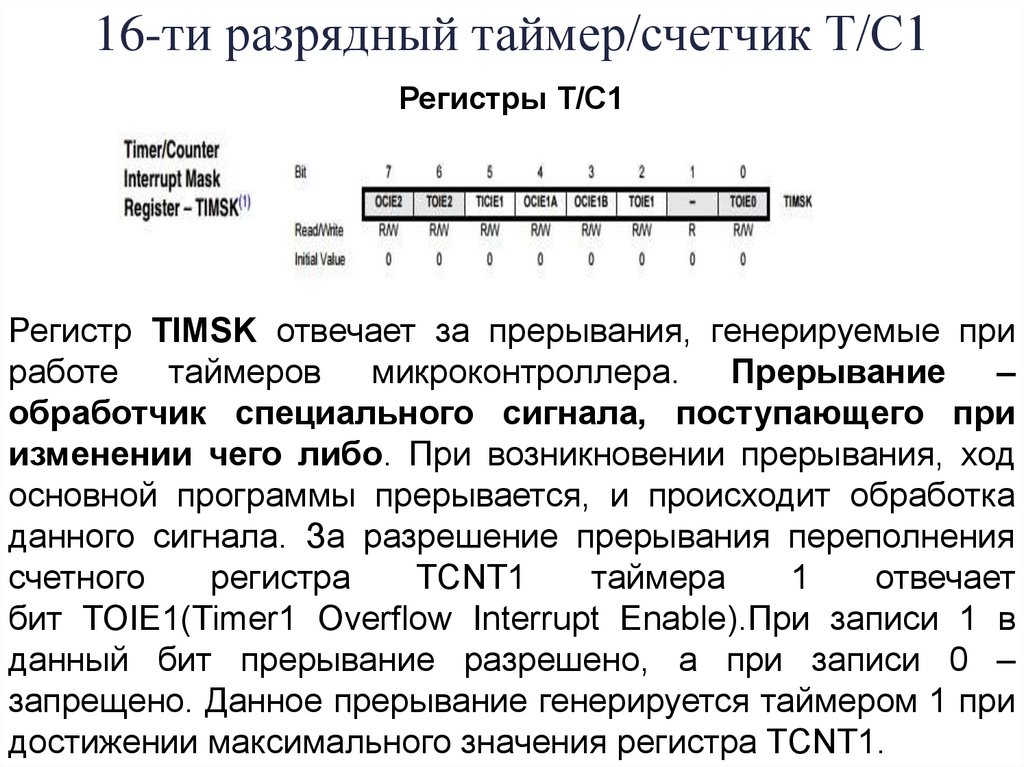
16-ти разрядный таймер/счетчик Т/С1Регистры Т/С1
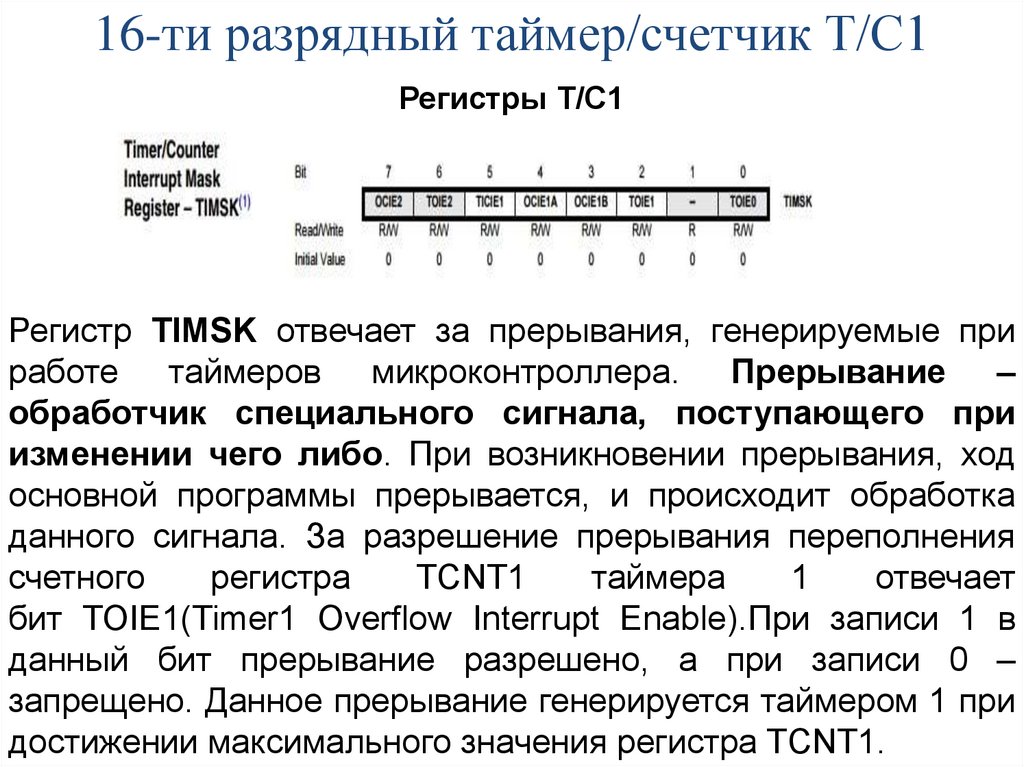
Регистр TIMSK отвечает за прерывания, генерируемые при
работе таймеров микроконтроллера. Прерывание –
обработчик специального сигнала, поступающего при
изменении чего либо. При возникновении прерывания, ход
основной программы прерывается, и происходит обработка
данного сигнала. За разрешение прерывания переполнения
счетного
регистра
TCNT1
таймера
1
отвечает
бит TOIE1(Timer1 Overflow Interrupt Enable).При записи 1 в
данный бит прерывание разрешено, а при записи 0 –
запрещено. Данное прерывание генерируется таймером 1 при
достижении максимального значения регистра TCNT1.
102.
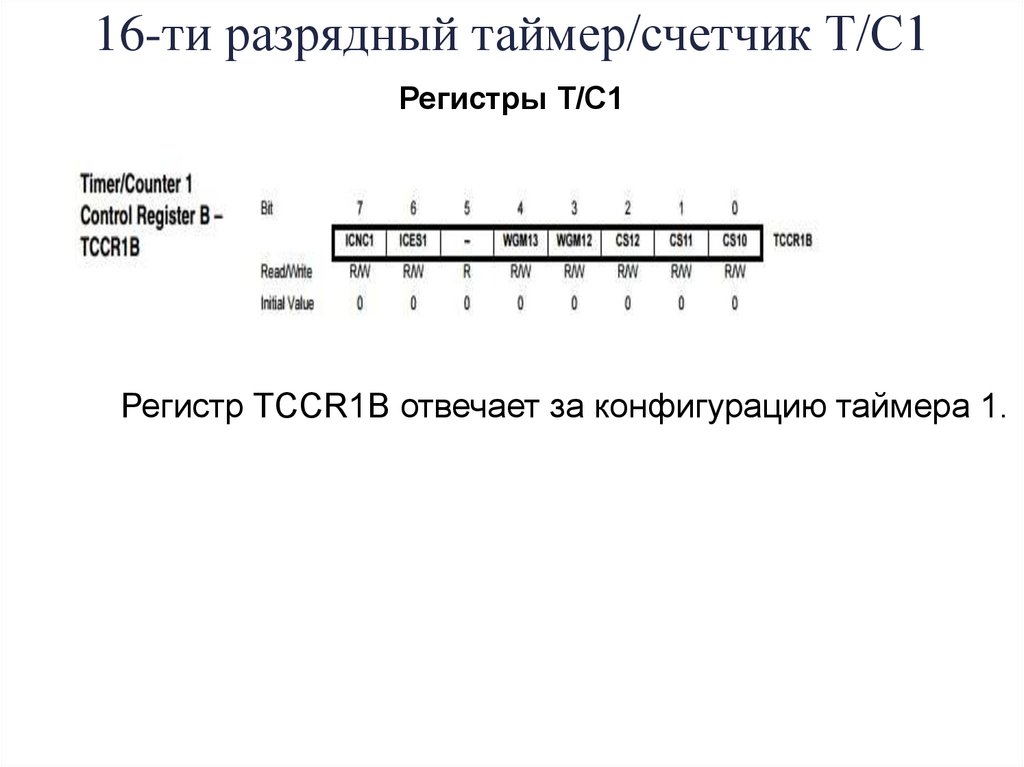
16-ти разрядный таймер/счетчик Т/С1Регистры Т/С1
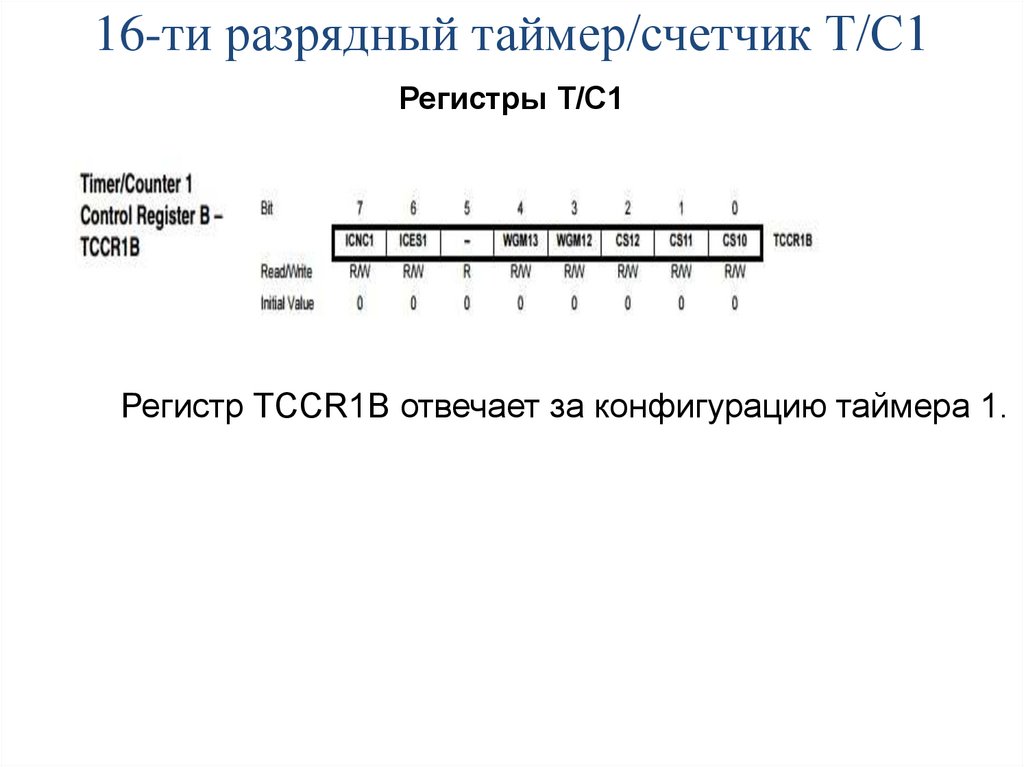
Регистр TCCR1B отвечает за конфигурацию таймера 1.
103.
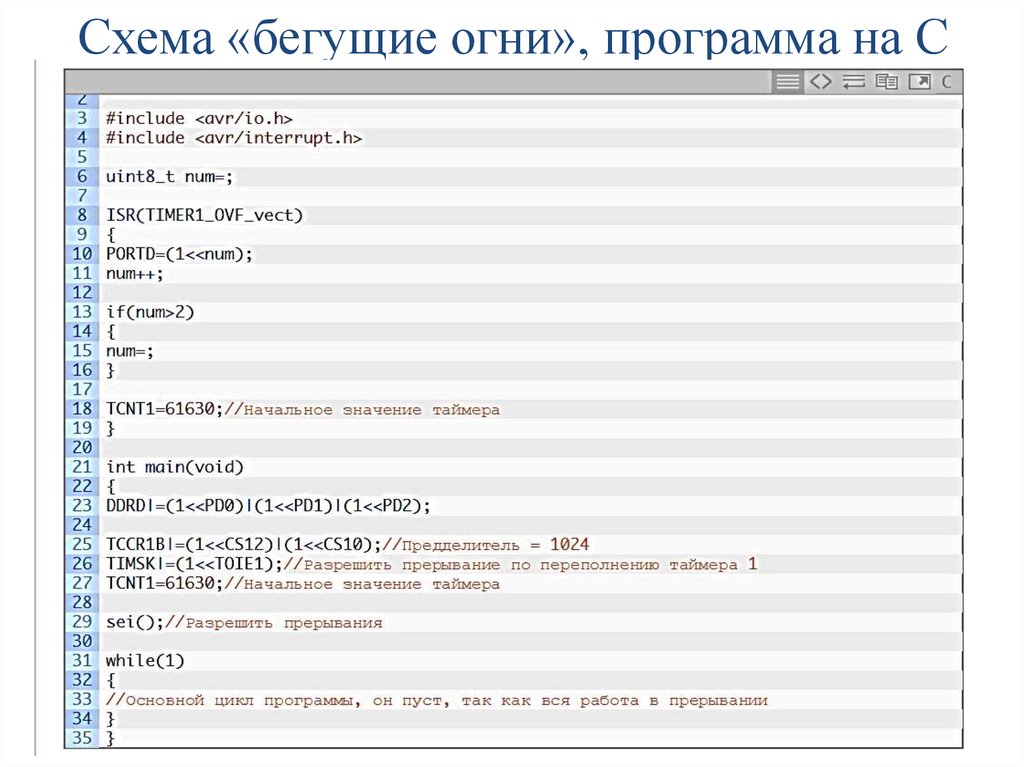
Схема «бегущие огни», программированиена С и ASM
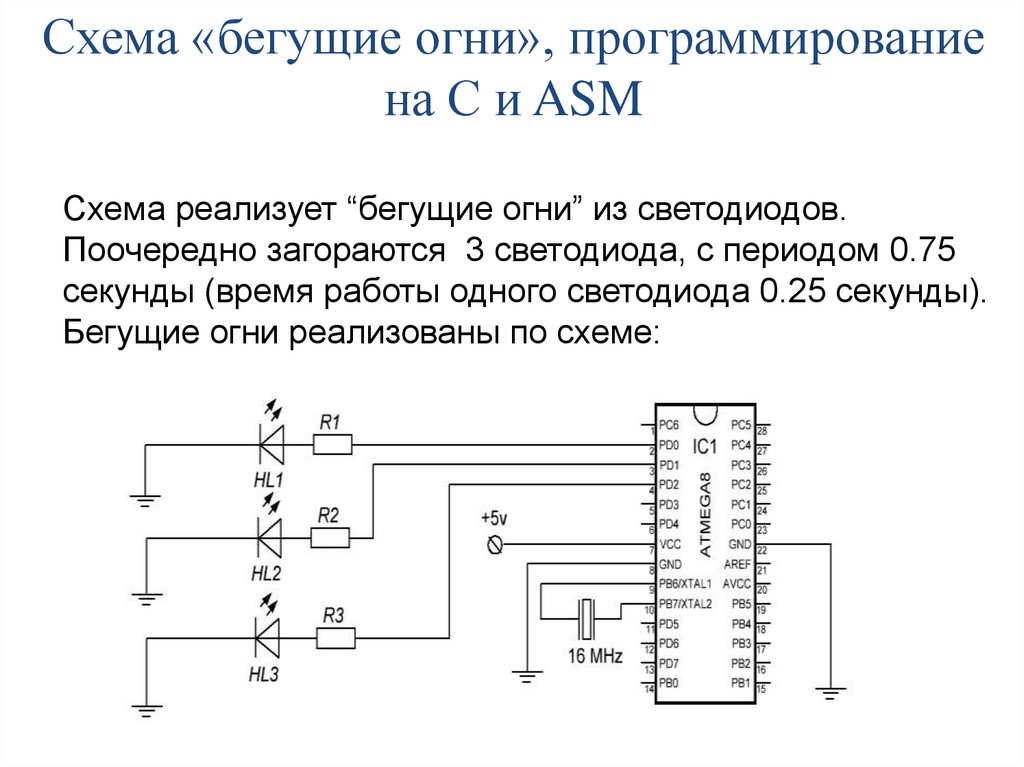
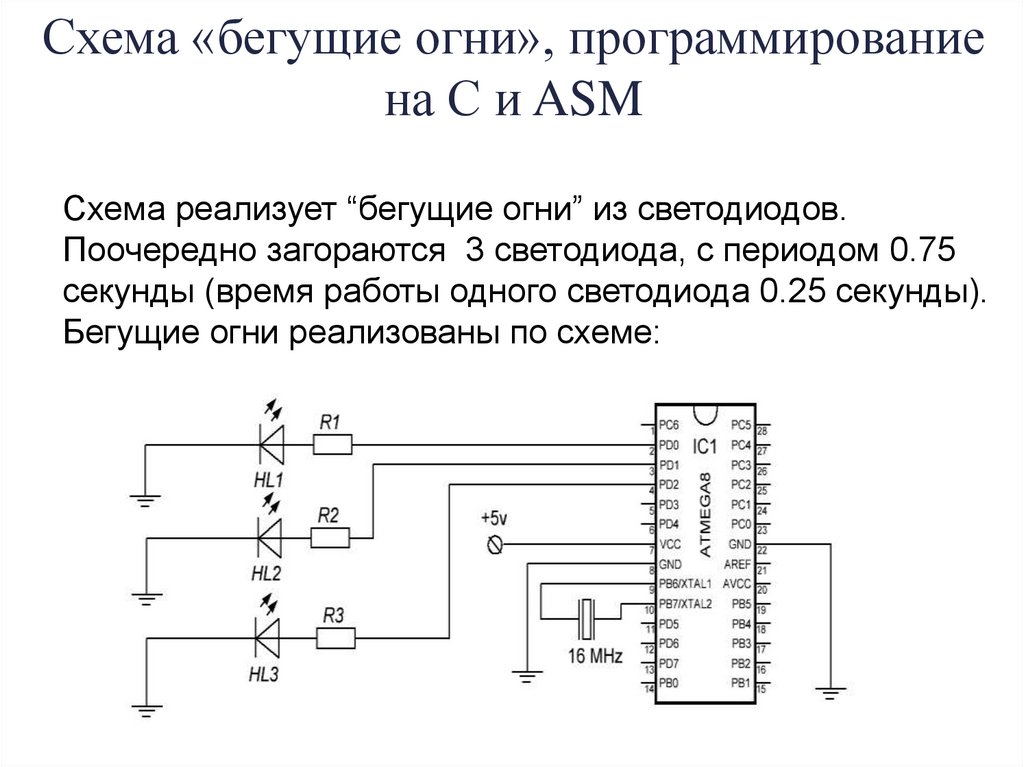
Схема реализует “бегущие огни” из светодиодов.
Поочередно загораются 3 светодиода, с периодом 0.75
секунды (время работы одного светодиода 0.25 секунды).
Бегущие огни реализованы по схеме:
104.
Схема «бегущие огни», программа на С105.
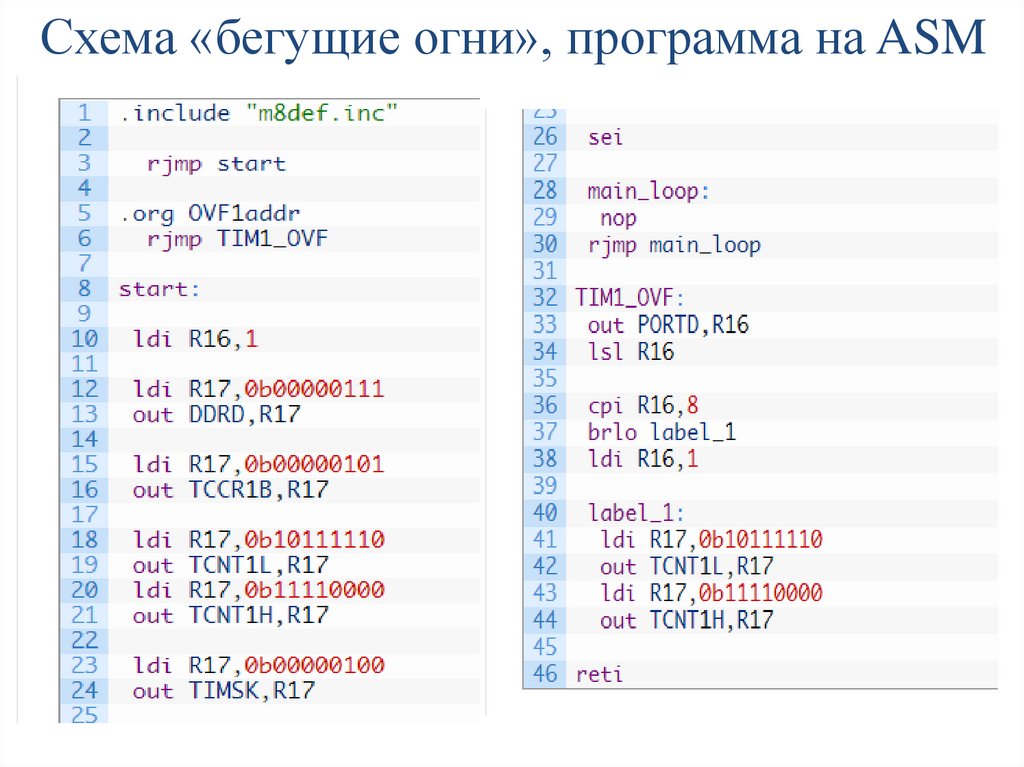
Схема «бегущие огни», программа на ASM106.
ПрерыванияПрерывание — сигнал, сообщающий о наступлении какого либо
события (переполнение счетчика таймера, завершение преобразования АЦП и
т.д.). При этом выполнение текущей последовательности команд прерывается,
и управление передается обработчику прерывания, который в свою очередь
корректно реагирует на событие и обрабатывает его, после чего управление
передается в прерванный код.
Прерывания позволяют своевременно обрабатывать события
периферийных устройств, таких как таймеры, АЦП, приемопередатчики и так
далее.
Внутренние прерывания — обработчики сигналов поступающих
от внутренней периферии контроллера (таймеры, АЦП, UART и т.д.).
Внешние прерывания — обработчики сигналов поступающих от
внешних устройств. Именно внешние прерывания позволяют реализовать
счетчики импульсов, измерять частоту чего либо, а так же быстро реагировать
на события внешних периферийных устройств.
Внешние прерывания происходят при изменении логического уровня
на определенных ножках контроллера.
Очень часто возникает необходимость быстрой обработки нажатия
кнопки. Никто не захочет нажимать и держать кнопку в ожидании реакции
контроллера.
Решить
эту
проблему
позволяют
внешние
прерывания INT0, INT1, возникновение которых возможно при изменении
логического уровня ножек PD2,PD3 микроконтроллера AtMega.
107.
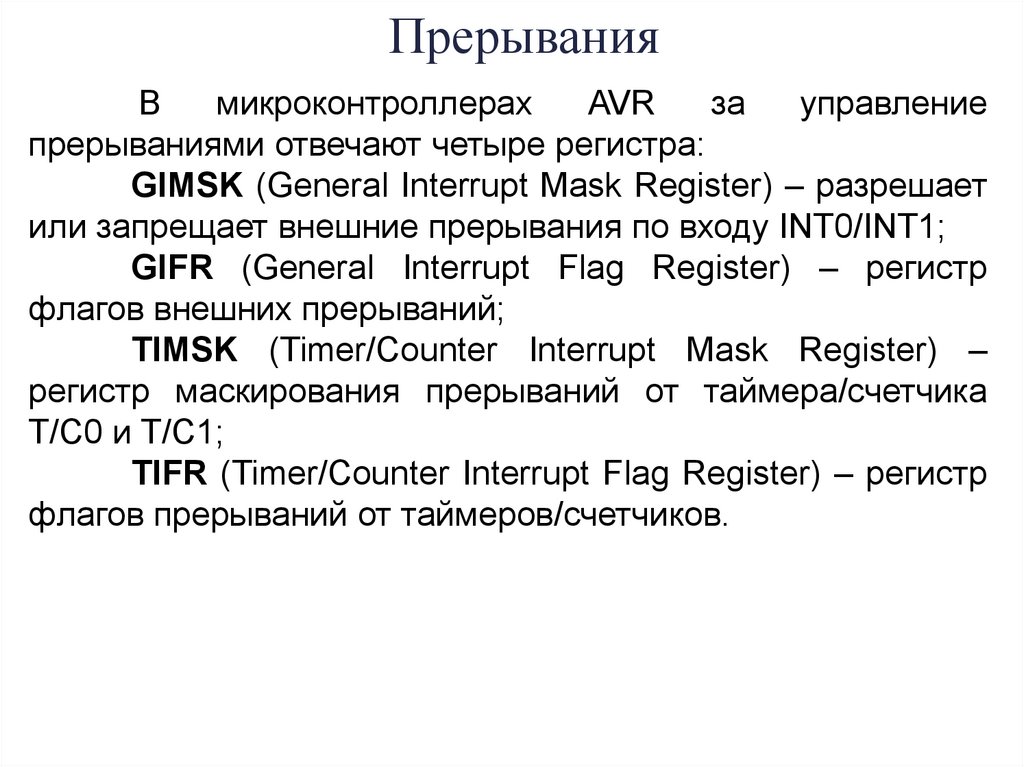
ПрерыванияВ
микроконтроллерах
AVR
за
управление
прерываниями отвечают четыре регистра:
GIMSK (General Interrupt Mask Register) – разрешает
или запрещает внешние прерывания по входу INT0/INT1;
GIFR (General Interrupt Flag Register) – регистр
флагов внешних прерываний;
TIMSK (Timer/Counter Interrupt Mask Register) –
регистр маскирования прерываний от таймера/счетчика
Т/С0 и Т/С1;
TIFR (Timer/Counter Interrupt Flag Register) – регистр
флагов прерываний от таймеров/счетчиков.
108.
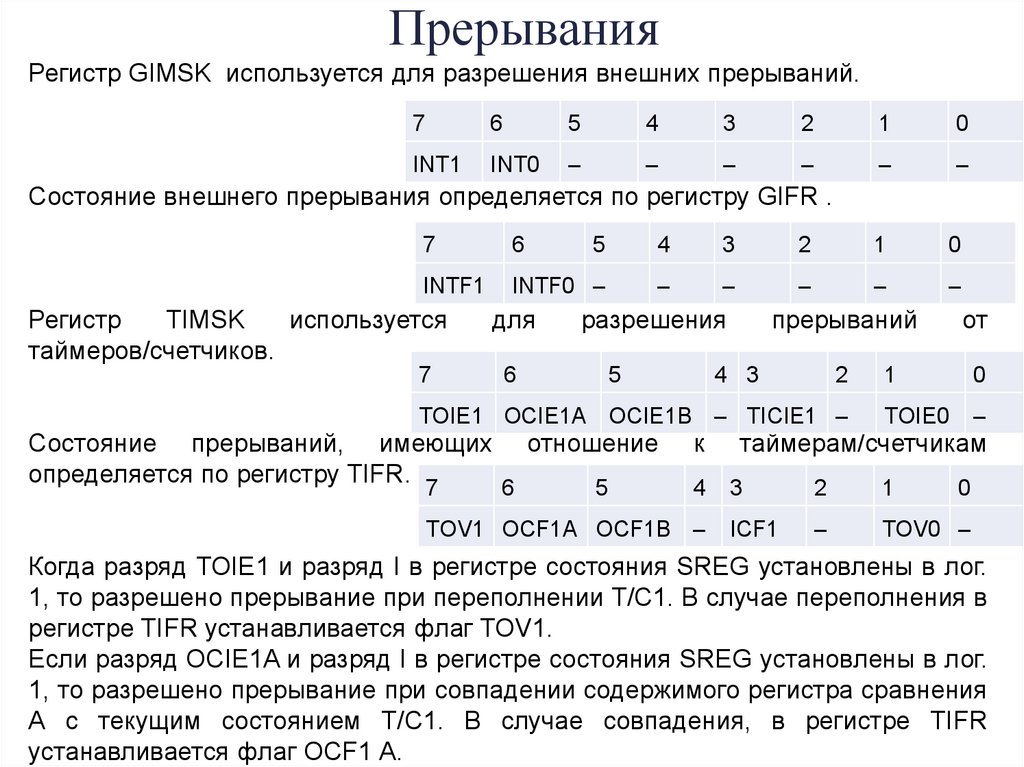
ПрерыванияРегистр GIMSK используется для разрешения внешних прерываний.
7
6
5
4
3
2
1
0
INT1
INT0
–
–
–
–
–
–
Состояние внешнего прерывания определяется по регистру GIFR .
7
6
5
4
3
2
1
0
INTF1
INTF0 –
–
–
–
–
–
Регистр
TIMSK
используется
таймеров/счетчиков.
7
для
6
разрешения
5
прерываний
от
2
1
0
TOIE0
–
4 3
TOIE1 OCIE1A OCIE1B – TICIE1 –
Состояние прерываний, имеющих отношение
определяется по регистру TIFR. 7
6
5
к
таймерам/счетчикам
4
3
2
1
ICF1
–
TOV0 –
TOV1 OCF1A OCF1B –
0
Когда разряд TOIE1 и разряд I в регистре состояния SREG установлены в лог.
1, то разрешено прерывание при переполнении Т/С1. В случае переполнения в
регистре TIFR устанавливается флаг TOV1.
Если разряд OCIE1A и разряд I в регистре состояния SREG установлены в лог.
1, то разрешено прерывание при совпадении содержимого регистра сравнения
А с текущим состоянием Т/С1. В случае совпадения, в регистре TIFR
устанавливается флаг OCF1 А.
109.
Векторы прерыванийАдрес в
Источник
памяти
прерывания
Описание
программ
0x0000
RESET
Сигнал сброса
0x0001
INT0
Внешний запрос на прерывание по входу INT0
0x0002
INT1
Внешний запрос на прерывание по входу INT1
0x0003
Т/С1
Захват по таймеру/счетчику Т/С1
0x0004
Т/С1
Совпадение с регистром сравнения А таймера Т/С1
0x0005
Т/С1
Совпадение с регистром сравнения В таймера Т/С1
0x0006
Т/С1
Переполнение таймера/счетчика Т/С1
0x0007
Т/С0
Переполнение таймера/счетчика Т/С0
0x0008
SPI
Завершение передачи данных по интерфейсу SPI
0x0009
UART
Прием байта приемопередатчиком UART завершен
0х000А
UART
Регистр данных приемопередатчика UART пуст
0x000В
UART
Передача данных приемопередатчиком UART завершена
0х000С
ANA_COMP
Прерывание от аналогового компаратора
110.
Векторы прерыванийАдрес в
Источник
памяти
прерывания
Описание
программ
0x0000
RESET
Сигнал сброса
0x0001
INT0
Внешний запрос на прерывание по входу INT0
0x0002
INT1
Внешний запрос на прерывание по входу INT1
0x0003
Т/С1
Захват по таймеру/счетчику Т/С1
0x0004
Т/С1
Совпадение с регистром сравнения А таймера Т/С1
0x0005
Т/С1
Совпадение с регистром сравнения В таймера Т/С1
0x0006
Т/С1
Переполнение таймера/счетчика Т/С1
0x0007
Т/С0
Переполнение таймера/счетчика Т/С0
0x0008
SPI
Завершение передачи данных по интерфейсу SPI
0x0009
UART
Прием байта приемопередатчиком UART завершен
0х000А
UART
Регистр данных приемопередатчика UART пуст
0x000В
UART
Передача данных приемопередатчиком UART завершена
0х000С
ANA_COMP
Прерывание от аналогового компаратора
111.
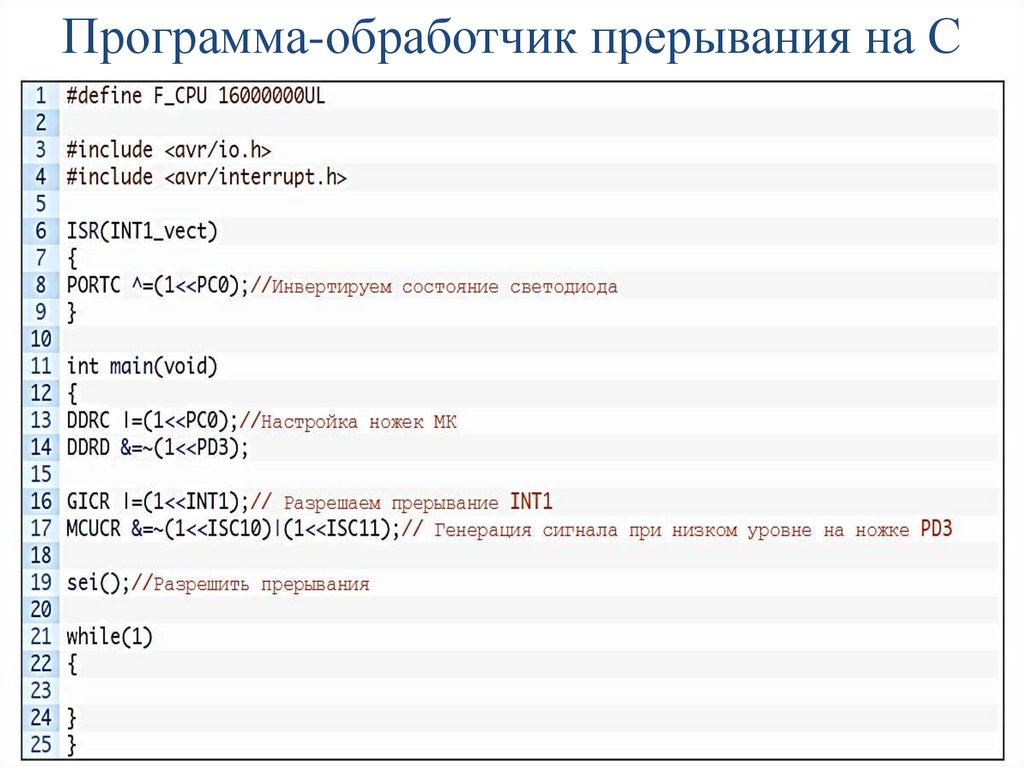
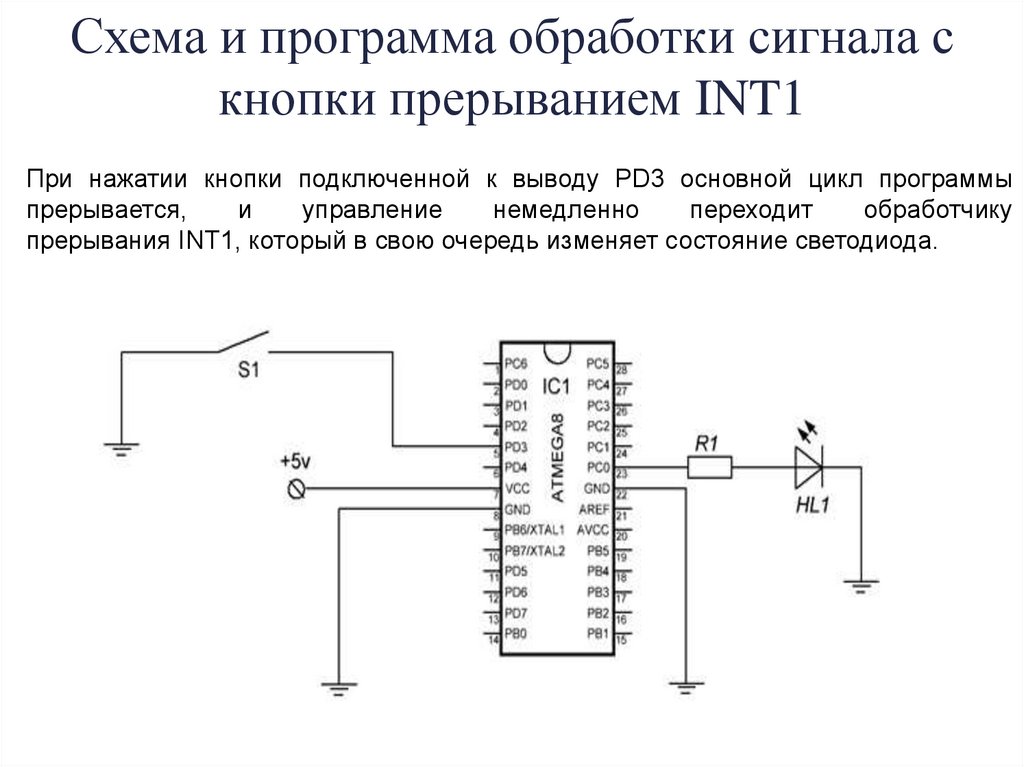
Схема и программа обработки сигнала скнопки прерыванием INT1
При нажатии кнопки подключенной к выводу PD3 основной цикл программы
прерывается,
и
управление
немедленно
переходит
обработчику
прерывания INT1, который в свою очередь изменяет состояние светодиода.
112.
Программа-обработчик прерывания на С113.
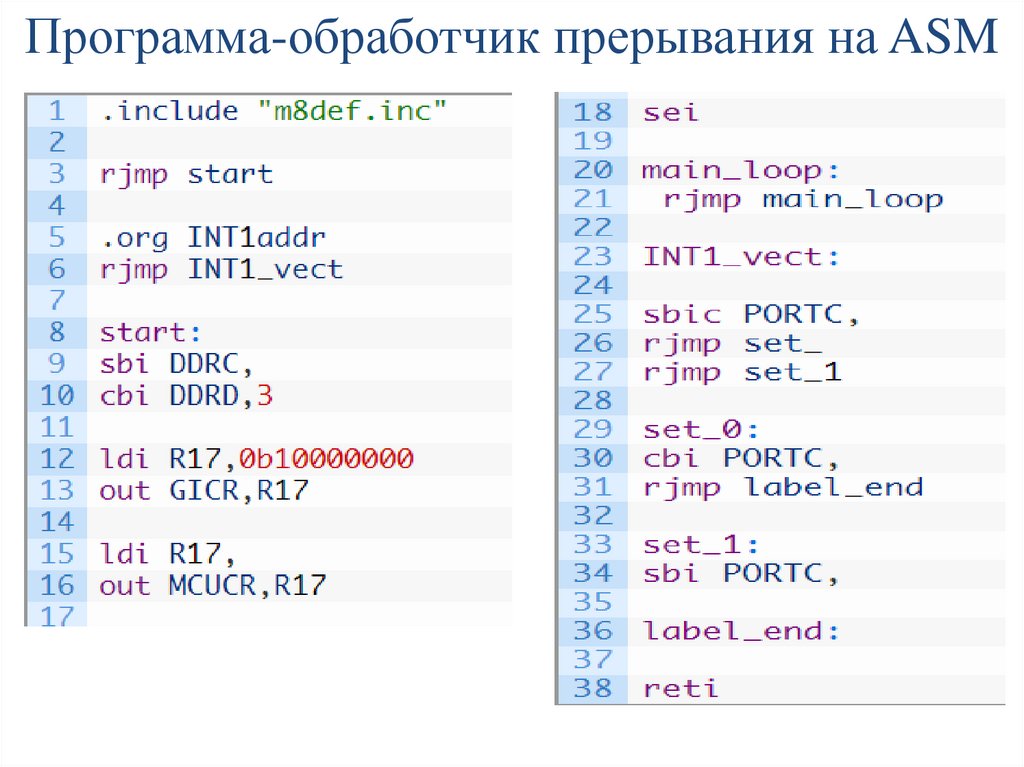
Программа-обработчик прерывания на ASM114.
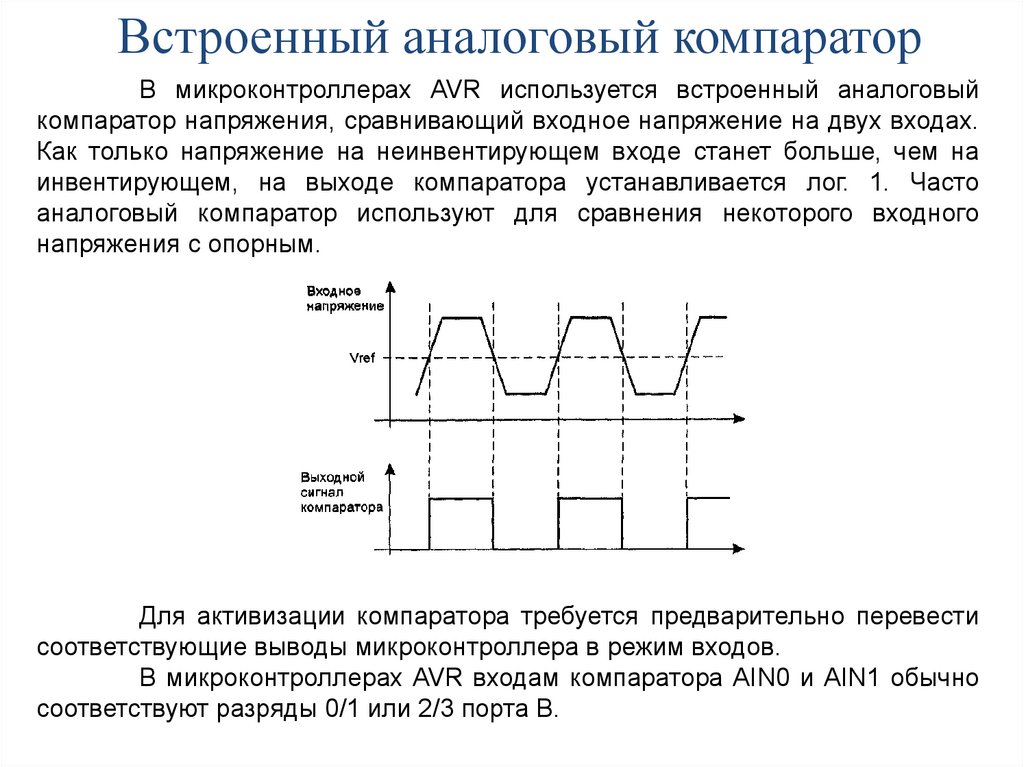
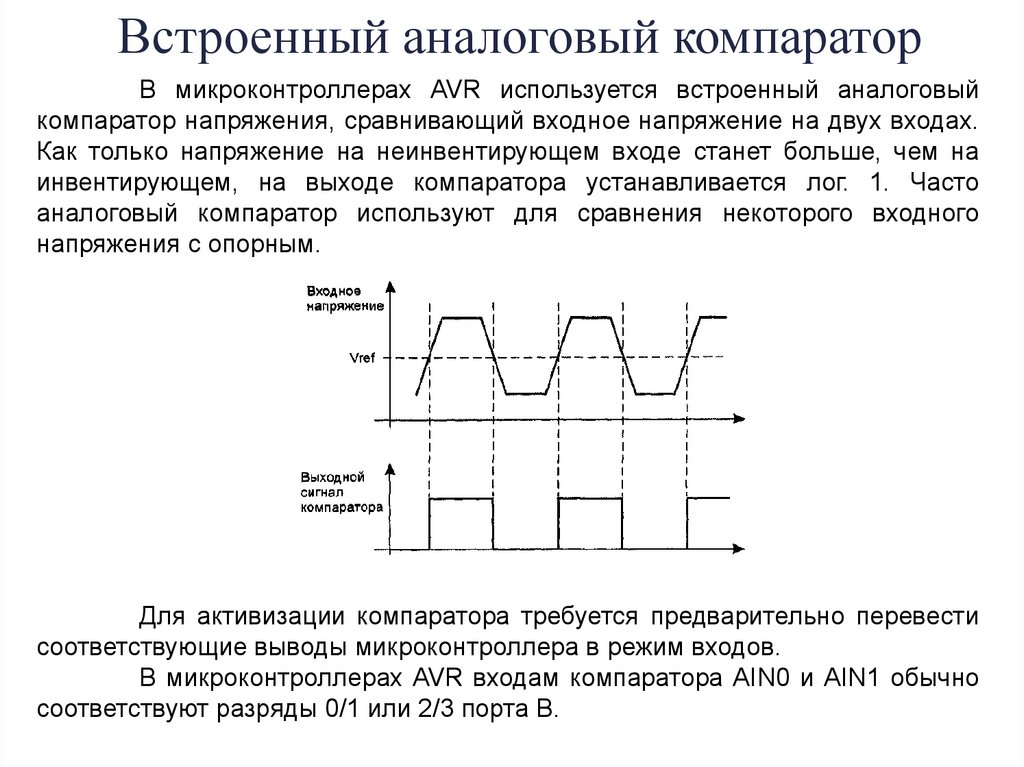
Встроенный аналоговый компараторВ микроконтроллерах AVR используется встроенный аналоговый
компаратор напряжения, сравнивающий входное напряжение на двух входах.
Как только напряжение на неинвентирующем входе станет больше, чем на
инвентирующем, на выходе компаратора устанавливается лог. 1. Часто
аналоговый компаратор используют для сравнения некоторого входного
напряжения с опорным.
Для активизации компаратора требуется предварительно перевести
соответствующие выводы микроконтроллера в режим входов.
В микроконтроллерах AVR входам компаратора AIN0 и AIN1 обычно
соответствуют разряды 0/1 или 2/3 порта В.
115.
Встроенный аналоговый компараторВ микроконтроллерах AVR для управления работой аналогового
компаратора используется регистр ACSR
7
6
5
4
3
2
1
0
ACD
–
ACO
ACI
ACIE
ACIC
ACIS1
ACIS0
Назначение разрядов регистра ACSR:
ACD – если установлен в лог. 1, питание аналогового компаратора отключено;
АСО – напрямую связан с выходом аналогового компаратора;
ACI – флаг прерываний от аналогового компаратора – устанавливается в лог.
1, когда наступает событие, определенное разрядами ACIS1 и ACIS0;
ACIE – разряд разрешения прерывания от аналогового компаратора;
ACIC – разряд разрешения захвата на входе аналогового компаратора; для
того чтобы можно было вызвать прерывание по захвату, оно должно быть
разрешено разрядом TICIE1 в регистре TIMSK;
ACIS1, ACIS0 – устанавливают вид события на выходе аналогового
компаратора, которое должно вызвать прерывание его работы.
ACIS1 AC1S0
0
0
0
1
1
0
1
1
Вид прерывания аналогового компаратора
Прерывание при изменении состояния выхода (разряда АСО)
Не используется
Прерывание по ниспадающему фронту на выходе аналогового
компаратора (напряжение на AIN1 больше, чем на AIN0)
Прерывание по нарастающему фронту на выходе аналогового
компаратора (напряжение на AIN0 больше, чем на AIN1)
116.
Аналого-цифровой преобразовательАналого-Цифровой преобразователь — устройство,
преобразующее входной аналоговый сигнал в цифровой код.
Преобразование
входного
сигнала
в
численное
представление происходит относительно опорного напряжения
(Vref) . Измерение напряжения производится в диапазоне от 0
до Vref. Весь этот диапазон делится в соответствии с
разрядностью. Если разрядность АЦП — 10 Бит, то диапазон
делится на 1023. Предполагая, что Vref = 5 Вольтам, при
разрядности 10 Бит мы получим шаг измерения 5/1023 = 0.0049
Вольт.
Для получения значения входного напряжения,
необходимо шаг измерения умножить на выходное значение
АЦП.
В микроконтроллерах AVR для управления режимом АЦП
используются два регистра: регистр управления ADCSRA и регистр
мультиплексирования ADMUX (определяет, какие из восьми входов
порта А являются аналоговыми).
117.
Аналого-цифровой преобразовательБиты REFS0-REFS1 отвечают за выбор опорного напряжения.
Бит ADLAR. Определяет порядок записи результатов преобразования в
регистры ADCL и ADCH..
118.
Аналого-цифровой преобразовательБиты MUX0-MUX3 отвечают за выбор входного канала.
119.
Аналого-цифровой преобразовательРегистр ADCSRA микроконтроллеров AVR
Бит ADEN включает и выключает АЦП микроконтроллера.
ADEN = 1 — АЦП включен.
ADEN = 0 — АЦП выключен.
При записи 1 в бит ADSC, в режиме однократного преобразования
запускается преобразование.
Бит ADFR, отвечает за выбор режима преобразования.
ADFR = 1 — Непрерывное преобразование.
ADFR = 0 — Однократное преобразование.
Бит ADIF, флаг окончания преобразования, становится равен 1 при
окончании преобразования
Бит ADIE, разрешает прерывание АЦП.
ADIE = 1 — Прерывание разрешено.
ADIE = 0 — Прерывание запрещено.
Биты ADPS0-ADPS2 отвечают за выбор предделителя между частотой
тактирования микроконтроллера и АЦП.
Результат преобразования помещается в пару регистров ADCH и ADCL.
120.
Дисциплина«Программирование микроконтроллеров»
Целью дисциплины является изучение структуры микропроцессоров и микроконтроллеров, основ
программирования микропроцессоров, знакомство с микропроцессорными системами, подсистемами памяти
и ввода-вывода.
Задачами дисциплины являются: освоение ключевых понятий микропроцессорной техники. Для этого
рассматриваются особенности систем различных уровней сложности и различного назначения, принципы
архитектурных решений, способы и средства организации обмена информацией.
Структура курса
1. Базовые принципы построения микропроцессоров и микропроцессорных систем
2. Знакомство с семейством микроконтроллеров AVR
3. Архитектура микроконтроллера ATMega
4. Система команд
5. Тактирование, питание, сброс, прерывания, порты ввода/вывода, таймеры, компаратор, АЦП,
последовательные интерфейсы
6. Программирование МК ATMega.
7. Компиляторы и средства разработки ПО. AVR Studio.
8. Язык С и директивы препроцессора
9. Ассемблер AVR. Команды, инструкции, нотации AVR ассемблера. Система команд AVR.
Арифметические операции. Программирование таймеров, памяти, АЦП, последовательных
интерфейсов.
121.
Дисциплина«Основы микропроцессорной техники»
Литература
Евстифеев А.В. Микроконтроллеры AVR семейства Mega. Руководство пользователя. - М:
изд-во Додэка XXI, 2007. - 592 с.
Новиков Ю. В. Основы микропроцессорной техники. - М.: Бином. Лаб. знаний, Интернетун-т информ. технологий, 2009. - 357с.
Шпак Ю.А. Программирование на языке С для AVR и PIC микроконтроллеров. - К.: МКПресс, 2006. - 400 c.
Ревич Ю.В. Практическое программирование микроконтроллеров Atmel AVR на языке
ассемблера. - СПб.: БХВ-Петербург, 2011. - 352 с.
Белов А.В. Разработка устройств на микроконтроллерах AVR: шагаем от «чайника» до
профи. – СПб.: Наука и техника, 2013, - 528 с.
Мортон Дж. Микроконтроллеры фирмы AVR. Вводный курс. - М: изд-во Додэка XXI,
2006. - 272 с.
Прокопенко В.С. Программирование микроконтроллеров Atmel на языке С. - К.: МКПресс, 2012. – 320 с.
Хартов В.Я. Микроконтроллеры AVR. Практикум для начинающих. – М.: Изд-во МГТУ
им. Н.Э Баумана, 2007. – 240 с.
122.
Тема 1. Базовые принципы построениямикропроцессоров и микропроцессорных систем
123.
Основные понятияМикропроцессор (МП) - функционально-завершенное, универсальное программноуправляемое устройство цифровой обработки данных, выполненное в виде одной
или нескольких микропроцессорных БИС.
Микропроцессорные системы (МС) - цифровые устройства или системы обработки
данных, контроля и управления, построенные на базе одного или нескольких МП.
Однокристальный МП - микропроцессор, выполненный в виде одной БИС и
осуществляющий программно-управляемый процесс обработки цифровой
информации с фиксированной разрядностью. Для расширения функциональных
возможностей однокристального МП его дополняют другими типами микросхем,
составляющих микропроцессорный комплект ИС и микропроцессорный набор
данного МП.
Микропроцессорный комплект ИС - совокупность микропроцессорных и других ИС,
совместимых по архитектуре, конструктивному исполнению и электрическим
параметрам и обеспечивающих возможность совместного применения.
Микропроцессорный набор - совокупность микропроцессорных и других ИС
микропроцессорного комплекта, номенклатура и количество которых необходимы и
достаточны для построения конкретного изделия вычислительной или
управляющей техники.
124.
Классификация микропроцессоровМикропроцессоры разбивают на два большие класса:
=> процессоры общего назначения, или универсальные микропроцессоры;
=> специализированные процессоры, среди которых наиболее широкое
распространение получили микроконтроллеры, цифровые сигнальные
процессоры и медийные процессоры.
Микропроцессоры общего назначения. Этот класс процессоров предназначен для
решения широкого круга задач обработки разнообразной информации и находит
применение в персональных компьютерах, рабочих станциях, серверах и других
цифровых системах массового применения.
Микроконтроллеры. Этот класс специализированных микропроцессоров
ориентирован на применение в качестве устройств или систем управления,
встраиваемых в разнообразную (в том числе и бытовую) аппаратуру. Особенностью
микроконтроллеров является размещение на одном кристалле, помимо
центрального процессора, внутренней памяти и большого набора периферийных
устройств.
Цифровые сигнальные процессоры. Этот класс специализированных
микропроцессоров предназначен для цифровой обработки поступающих
аналоговых сигналов в реальном времени.
Медийные процессоры. Этот тип процессоров предназначен для обработки аудиосигналов, графики, видеоизображений, а также для решения ряда
коммуникационных задач в мультимедиа-компьютерах, игровых приставках,
бытовых приборах и др.
125.
Классификация микропроцессорных системСформировалось несколько типов микропроцессорных систем, различающихся
мощностью, универсальностью, быстродействием и структурными отличиями.
Основные типы следующие:
микроконтроллеры — наиболее простой тип микропроцессорных систем, в
которых все или большинство узлов системы выполнены в виде одной
микросхемы;
контроллеры — управляющие микропроцессорные системы, выполненные в виде
отдельных модулей;
микрокомпьютеры — более мощные микропроцессорные системы с развитыми
средствами сопряжения с внешними устройствами.
компьютеры (в том числе персональные) — самые мощные и наиболее
универсальные микропроцессорные системы.
126.
Что такое микропроцессор?Микропроцессор — это тот узел, блок, который производит всю обработку
информации внутри микропроцессорной системы. Остальные узлы выполняют
всего лишь вспомогательные функции: хранение информации, связи с внешними
устройствами, связи с пользователем и т.д.
Все свои операции процессор выполняет последовательно, то есть одну за
другой, по очереди.
Микропроцессор работает под управлением программы. Программа представляет
собой набор команд (инструкций), то есть цифровых кодов, расшифровав которые,
процессор узнает, что ему надо делать.
Все команды, выполняемые процессором, образуют систему команд процессора.
Структура и объем системы команд процессора определяют его быстродействие,
гибкость, удобство использования.
127.
Информационные потоки в микропроцессорной имикроконтроллерной системе
128.
129.
130.
Принципы Джона фон Неймана131.
Устройстваввода
Внешняя
память
Устройства
вывода
Порты
ввода
Оперативная
память
Порты
вывода
Управляющее
устройство
Арифметико-логическое
устройство
132.
Процессор. Программно-управляемоеустройство, обрабатывает данные и управляет
работой компьютера.
Состоит из устройства управления (УУ) и
арифметико-логического устройства (АЛУ).
УУ управляет работой компьютера,
взаимодействием компонентов друг с другом.
АЛУ исполняет арифметические и логические
операции.
133.
Оперативное запоминающее устройство.Хранит информацию, с которой компьютер
работает в данное время: программу, исходные
данные, промежуточные и конечные результаты
счета.
Эта память небольшого объема,
энергозависима.
134.
Внешнее запоминающее устройство.Это были магнитные устройства для
долговременного хранения информации.
Большего объема, более медленные.
Магнитные барабаны, ленты, диски.
Устройство ввода-вывода
135.
Архитектурные принципы ЭВМфон Неймана
• Принцип двоичного кодирования
• Принцип программного управления
• Принцип однородности памяти
• Принцип адресуемости памяти
• Принцип условного перехода
136.
Архитектурные принципы ЭВМфон Неймана
1.Использование двоичной системы
счисления для представления
информации в ЭВМ.
Ее просто реализовать технически для
выполнения арифметических и
логических операций.
Ранее ЭВМ обрабатывали числа в
десятичном виде.
137.
Архитектурные принципы ЭВМфон Неймана
2.Программное управление работой ЭВМ.
Программа состоит из команд.
Все команды образуют систему команд
машины.
Команды программы последовательно
считываются из памяти и выполняются.
Адрес очередной команды хранится в
счетчике команд.
138.
Архитектурные принципы ЭВМфон Неймана
3. Принцип однородности памяти. Команды и данные
хранятся в одной и той же памяти и внешне в памяти
неразличимы. Распознать их можно только по способу
использования; то есть одно и то же значение в ячейке
памяти может использоваться и как данные, и как команда, и
как адрес в зависимости лишь от способа обращения к нему.
Это позволяет производить над командами те же операции,
что и над числами, и, соответственно, открывает ряд
возможностей. Так, циклически изменяя адресную часть
команды, можно обеспечить обращение к
последовательным элементам массива данных. Такой
приём носит название модификации команд и с позиций
современного программирования не приветствуется.
139.
Архитектурные принципы ЭВМфон Неймана
4. Принцип адресности.
Структурно основная память состоит из пронумерованных
ячеек, причём процессору в произвольный момент доступна
любая ячейка. Двоичные коды команд и данных разделяются
на единицы информации, называемые словами, и хранятся в
ячейках памяти, а для доступа к ним используются номера
соответствующих ячеек — адреса.
140.
Архитектурные принципы ЭВМфон Неймана
5.Принцип условного перехода.
Можно нарушить естественную
последовательность команд в программе.
Используется в командах безусловного и
условного переходов
141.
Классификация компьютерных архитектурCISC (Complicated Instruction Set Computers – компьютеры с усложненной системой
команд)
Процессоры Intel и AMD до 1990ых
RISC (Reduced Instruction Set Computers – компьютеры с упрощенной системой
команд)
Процессоры Intel и AMD, PowerPC с
начала1990ых
VLIW (Very Long Instruction Word – компьютеры с широким командным словом)
Эльбрус» — процессорная архитектура и одноимённое семейство
универсальных VLIW-микропроцессоров. Основные особенности:
длинное командное слово — способность выполнять несколько операций за
один такт операций, что обеспечивает высокую производительность при
умеренной тактовой частоте;
динамическая двоичная трансляция — эмуляция работы процессора на
архитектуре x86, используемая для выполнения x86-программ (требует 2 ядра
для работы);
защищённый режим — аппаратный контроль целостности структуры памяти,
обеспечивающий информационную безопасность;
отсутствие микрокода — компилятор переводит исходный код сразу в двоичный
код, минуя микрокод, как это реализовано на x86.
142.
CISC (Complex Instruction Set Соmputer)Проблема семантического разрыва решается за счет расширения
системы команд, дополнения ее сложными командами, семантически
аналогичными операторам ЯВУ.
Mov @ind(reg), @ind(reg)
Доля дополнительных команд, эквивалентных операторам ЯВУ, в
общем объеме программ не превышает 10-20%, а для некоторых
наиболее сложных команд даже 0,2%. В то же время объем
аппаратных средств, требуемых для реализации дополнительных
команд, возрастает весьма существенно. Так, емкость
микропрограммной памяти при поддержании сложных команд может
увеличиваться на 60%.
143.
Характеристики CISC•Небольшое число регистров общего назначения;
•Большое количество машинных команд, некоторые из них
аппаратно реализуют сложные операторы ЯВУ;
•Широкое использование микропрограммирования;
•Разнообразие способов адресации операндов;
•Разная временная структура выполнения команд;
•Множество форматов команд различной разрядности (Pentium –
длина команды 1-10 байт);
•Преобладание двухадресного формата команд;
•Наличие команд, где обработка совмещается с обращением к
памяти;
•Конвейер команд загружен не полностью.
144.
RISC (Reduced Instruction Set Computer)Джон Кок (70-е), Д. Паттерсон и Д. Дитцель 1980г.
Идея заключается в ограничении списка команд ЭВМ наиболее часто
используемыми простейшими командами, оперирующими данными,
размещенными только в регистрах процессорах. Сложные команды
ЯВУ выполняются набором простых.
Закон 20/80:
80% текста включает лишь 20% словаря.
CISC
T1
Команда 1
Команда 2
T2
T3
T4
T1
T2
T3
T4
T5
К2
К3
К4
К5
К6
К7
К8
К9
RISC
К1
145.
Сравнение процессоровMotorola 68030
Intel 80386
SPARC
Коэфиц. Увеличения Среднее
число Эквивалентная
числа клманд для циклов выполнения производительность
выполнения
тойже команды C
P=F/I*C
функции I%
100
5.2
4.8
110
4.4
5.2
120
1.3
16
Длина программного кода RISC на 25-45% больше обычной.
Первый RISC: IBM 801 32разряда, 1979г.
MIPS - Microproc.without interlocked pipeline stages - микропроцессор с
конвейером без задержек
SPARC - Scalable Processor Architecture - Масштабируемая
процессорная архитектура
146.
Характеристики RISC•Небольшое число команд с простым декодированием;
•Резко уменьшено количество форматов команд;
•Почти все команды выполняются за один такт;
•Ограничено количество способов адресации;
•Длинный регистровый файл, что позволяет большему объему данных
храниться в регистрах на процессорном кристалле большее время и
упрощает работу компилятора по распределению регистров под
переменные;
•Обращение к памяти допускается лишь с помощью специальных
команд чтения и записи;
•Используются трехадресные команды, что помимо упрощения
дешифрации дает возможность сохранять большее число переменных в
регистрах без их последующей перезагрузки;
•Эффективно загружен конвейер команд.
147.
Сравнение RISC и CISC процессоров148.
149.
150.
151.
152.
153.
Гарвардская архитектураРазные шина данных и шина адреса для всех
данных и команд
Модифицированная гарвардская архитектура
Общие шина данных и шина адреса для всех внешних данных, внутри
процессора используется шина данных, шина команд и две шины
адреса
Расширенная (супер-) гарвардская архитектура
Разные шина данных и шина адреса для всех данных, команды
хранятся внутри кэш-памяти, что позволяет передавать по два
операнда команды одновременно
154.
Обобщенный алгоритм функционированияфон-неймановской ЭВМ
Инициализация
Выборка команды
Увеличение программного счетчика
Дешифрация и выполнение команды
Нет
Остановка
процессора
Да
Инициализация
155.
ДВОИЧНЫЙ ПРОГРАММИСТ156.
ТАБЛИЦА ДВОИЧНЫХ ЧИСЕЛ ИИХ ДЕСЯТИЧНЫЙ ЭКВИВАЛЕНТ
157.
ШЕСТНАДЦАТЕРИЧНАЯСИСТЕМА СЧИСЛЕНИЯ
158.
Преобразование чисел из двоичнойсистемы счисления в десятичную
159.
Преобразование чисел из десятичнойсистемы счисления в двоичную
160.
Преобразование чисел из десятичнойсистемы счисления в двоичную
161.
162.
163.
164.
165.
166.
167.
168.
ЦИФРОВАЯ ШКАЛА ИЧЕТЫРЕХБИТНОЕ КОДИРОВАНИЕ
169.
АРИФМЕТИЧЕСКИЕ ОПЕРАЦИИПример сложения чисел в обратном и
дополнительном коде
170.
КОДИРОВАНИЕ. ТАБЛИЦА КОДОВ ASCII171.
172.
УПДМашинный
носитель
Первичная
информация
Обобщенная структурная схема ЭВМ
УВВ – устройство ввода
УВыв – устройство вывода
УПД – устройство подготовки
данных
ОЗУ – оперативное
запоминающее устройство
ВЗУ – внешнее запоминающее
устройство
УУ – устройство управления
ПУ – пульт управления
АЛУ – арифметико-логическое
устройство
УВВ
АЛУ
ВЗУ
ОЗУ
УВыв
Результаты
УУ
ПУ
173.
Шинная структура связейПри шинной структуре связей все сигналы между устройствами передаются по
одним и тем же линиям связи, но в разное время (мультиплексированная передача).
Причем передача по всем линиям связи может осуществляться в обоих направлениях
(так называемая двунаправленная передача). Группа линий связи, по которым
передаются сигналы или коды, называется шиной (англ. bus).
Достоинство: все устройства, подключенные к шине, должны принимать и
передавать информацию по одним и тем же правилам (протоколам обмена
информацией по шине). Соответственно, все узлы, отвечающие за обмен с шиной в
этих устройствах, должны быть единообразны, унифицированы.
Недостаток: все устройства подключаются к каждой линии связи параллельно.
Поэтому любая неисправность любого устройства может вывести из строя всю
систему, если она портит линию связи.
174.
175.
Выходные каскады цифровых микросхема)
б)
в)
стандартный выход или выход с двумя состояниями (а);
выход с открытым коллектором (б);
выход с тремя состояниями или (что то же самое) с возможностью отключения (в)
Мультиплексированная линия
Двунаправленная линия
176.
Архитектура ЭВМ с шинной организациейЦентральный процессор
Генератор
тактовой частоты
Арифметико-логическое устройство
Выполняемая
Регистровая память Регистр флагов
операция
Арифметико-логическое устройство
Программный счетчик
Регистр адреса
Пульт управления
Регистр команды
Шина адреса
Шина данных
Шина управления
Адрес
Данные
Управление
Ячейка 1
Ячейка 2
Ячейка 3
...
Ячейка n
Адрес
Порт 1
Порт 2
Порт 3
Память
...
Порт n
Данные
Управление
Порты
устройств
ввода-вывода
177.
Краткое описание регистров процессораРегистр данных - служит для временного хранения
промежуточных результатов при выполнении операций.
Регистр-аккумулятор - регистр временного хранения,
который
используется
в
процессе
вычислений
(например, в нем формируется результат выполнения
команды умножения).
Регистр-указатель
стека
используется
при
операциях со стеком.
Индексные, указательные и базовые регистры
используются для хранения и вычисления адресов
операндов в памяти.
Регистры-счетчики используются для организации
циклических участков в программах.
Регистры общего назначения могут использоваться
для любых целей.
178.
Структура типового микропроцессораВнутренняя структура микропроцессора
Схема управления выборкой команд выполняет
чтение команд из памяти и их дешифрацию.
Арифметико-логическое устройство (или АЛУ, ALU)
предназначено
для
обработки
информации
в
соответствии с полученной процессором командой.
Регистры процессора представляют собой по сути
ячейки очень быстрой памяти и служат для временного
хранения различных кодов: данных, адресов, служебных
кодов.
Регистр признаков (регистр состояния) также
является
внутренним
регистром
процессора.
Содержащаяся в нем информация — это не данные, не
адрес, а слово состояния процессора (PSW — Processor
Status Word). Каждый бит этого слова (флаг) содержит
информацию о результате предыдущей команды.
Схема управления прерываниями обрабатывает
поступающий на процессор запрос прерывания,
определяет адрес начала программы обработки
прерывания (адрес вектора прерывания), обеспечивает
переход к этой программе. По окончании программы
обработки прерывания процессор возвращается к
прерванной программе.
Схема управления прямым доступом к памяти служит для временного отключения процессора от
внешних шин и приостановки работы процессора на время предоставления прямого доступа запросившему
его устройству.
Логика управления организует взаимодействие всех узлов процессора, перенаправляет данные,
синхронизирует работу процессора с внешними сигналами, а также реализует процедуры ввода и вывода
информации.
179.
Функции устройств МПСФункции процессора
Важнейшие характеристики процессора — это количество разрядов его
шины данных, количество разрядов его шины адреса и количество
управляющих сигналов в шине управления. Разрядность шины данных
определяет скорость работы системы. Разрядность шины адреса определяет
допустимую сложность системы. Количество линий управления определяет
разнообразие режимов обмена и эффективность обмена процессора с
другими устройствами системы.
Основные функции любого процессора следующие:
выборка (чтение) выполняемых команд;
ввод (чтение) данных из памяти или устройства ввода/вывода;
вывод (запись) данных в память или в устройства ввода/вывода;
обработка данных (операндов), в том числе арифметические операции над
ними;
адресация памяти, то есть задание адреса памяти, с которым будет
производиться обмен;
обработка прерываний и режима прямого доступа.
180.
Функции памятиПамять микропроцессорной системы выполняет функцию временного или постоянного хранения
данных и команд.
Информация в памяти хранится в ячейках, количество разрядов которых равно количеству разрядов
шины данных процессора. Допустимое количество ячеек памяти определяется количеством разрядов
шины адреса как 2N, где N — количество разрядов шины адреса. Например, если память имеет 65 536
ячеек, каждая из которых 16-разрядная, то говорят, что память имеет объем 128 Кбайт: 216 ячеек 2
байта = 217 байт = 27 210 = 128 кБ.
Совокупность ячеек памяти называется обычно пространством памяти системы.
Для подключения модуля памяти к системной магистрали используются блоки сопряжения, которые
включают в себя дешифратор (селектор) адреса, схему обработки управляющих сигналов магистрали и
буферы данных.
181.
Функции устройств ввода-выводаВходной порт (порт ввода) в простейшем случае
представляет собой параллельный регистр, в
который процессор может записывать информацию.
Выходной порт (порт вывода) обычно представляет
собой просто однонаправленный буфер, через
который процессор может читать информацию от
внешнего устройства.
При обращении со стороны магистрали
селектор адреса распознает адрес, приписанный
данному
устройству
ввода/вывода.
Схема
управления выдает внутренние стробы обмена в
ответ на магистральные стробы обмена. Входной
буфер
данных
обеспечивает
электрическое
согласование шины данных с этим устройством
(буфер может и отсутствовать). Данные из шины
данных записываются в регистр по сигналу С и
выдаются на внешнее устройство. Выходной буфер
данных передает входные данные с внешнего
устройства на шину данных магистрали в цикле
чтения из порта.
Каждому устройству ввода/вывода отводится свой адрес в адресном пространстве микропроцессорной
системы. Дублирование адресов должно быть исключено, за этим должны следить разработчик и
пользователь микропроцессорной системы.
Группы устройств ввода/вывода:
устройства интерфейса пользователя (ввода информации пользователем и вывода информации для
пользователя);
устройства ввода/вывода для длительного хранения информации;
таймерные устройства.
182.
ТИПОВЫЕ ЛОГИЧЕСКИЕ ЭЛЕМНТЫ И УЗЛЫ МП И ИХ ФУНКЦИИАрифметико-логическое устройство (АЛУ)
183.
ТИПОВЫЕ ЛОГИЧЕСКИЕ ЭЛЕМЕНТЫ И УЗЛЫ МП И ИХФУНКЦИИ.
Арифметико-логическое устройство (АЛУ).
184.
УПРОЩЕННАЯ СХЕМА АЛУ185.
ОСНОВНЫЕ ЭЛЕМЕНТЫ АЛУ186.
ОСНОВНЫЕ ЭЛЕМЕНТЫ АЛУ187.
Регистры МП188.
АККУМУЛЯТОР189.
АККУМУЛЯТОР190.
СЧЕТЧИК КОМАНД191.
РЕГИСТР АДРЕСА. БУФЕРНЫЙ РЕГИСТР192.
РЕГИСТР СОСТОЯНИЯ (ПРИЗНАКОВ)193.
РЕГИСТРЫ ОБЩЕГО НАЗНАЧЕНИЯ. УКАЗАТЕЛЬ СТЕКАСТЕК – область памяти или регистр, в котором хранятся
адреса возврата программы из подпрограмм или прерываний
194.
УСТРОЙСТВО УПРАВЛЕНИЯ195.
УПРОЩЕННАЯ СТРУКТУРНАЯ СХЕМА УСТРОЙСТВАУПРАВЛЕНИЯ (ДЛЯ RISC)
196.
УПРОЩЕННАЯ СТРУКТУРНАЯ СХЕМА УСТРОЙСТВАУПРАВЛЕНИЯ (ДЛЯ СISC)
197.
СТЕК. ПРИНЦИП РАБОТЫ СТЕКА198.
СТЕК. ПРИНЦИП РАБОТЫ СТЕКА199.
СИСТЕМА ШИН200.
СИСТЕМА ШИН201.
СИСТЕМА ШИН202.
СИСТЕМА ШИН203.
Типовая структура системы управления наоснове микроконтроллера
ФСУ – формирователи сигналов управления; ИУ – исполнительные
устройства; Д – датчики; ФСС – формирователи сигналов состояния
204.
Семейство AVR-контроллеровУ АVR-контроллеров есть две особенности, которые
отличают это семейство от остальных МК.
1. Система команд и архитектура ядра АVR
разрабатывались совместно с фирмой-разработчиком
компиляторов с языков программирования высокого уровня IAR
Systems. В результате появилась возможность писать А VRпроrраммы на языке С без большой потери в производительности
по сравнению с программами, написанными на ассемблере.
2. Одним из существенных преимуществ А VR стало
применение конвейера. В результате для АVR не существует
понятия машинного цикла: большинство команд выполняется за
один такт. Для сравнения отметим, что пользующиеся большой
популярностью МК семейства PIC выполняют команду за 4 такта, а
классические 8051 - 12 тактов.
205.
Семейство AVR-контроллеровТри самых распространенных семейств контроллеров.
1. Контроллеры классической архитектуры х51 (первые
микросхемы семейства 8051 были выпущены еще в начале 1980'-х)
лучше всего подходят для общего изучения предмета. Отметим, что
кроме Atmel, х51-совместимые изделия выпускают еще порядка
десятка фирм, включая такие гиганты, как Philips и Siemens, есть и
отечественные аналоги (серии 1816, 1830 и др.), что делает эту
архитектуру наиболее универсальной.
2. Семейство А VR рекомендуется для начинающих
электронщиков-практиков, в силу простоты и универсальности
устройства, преемственности структуры для различных типов
контроллеров, простоты схемотехники и программирования (в
данном случае под «программированием» понимается процесс
записи программ в микросхему).
3. PIC фирмы Microchip идеально подходят для
проектирования несложных устройств, особенно предназначенных
для тиражирования.
206.
Корпус микроконтроллерасемейства ATMega
207.
Характеристики микроконтроллера ATmegaAtmega - микроконтроллер семейства AVR имеет 8-битный процессор и
позволяет выполнять большинство команд за один такт.
Память:
32 РОН (регистра общего назначения)
32 kB Flash (память программ, имеющая возможность самопрограммирования)
2 kB ОЗУ*
1 kB EEPROM (постоянная память данных)*
Периферийные устройства:
Два 8-битных таймера/счетчика с модулям сравнения и делителями частоты
16-битный таймер/счетчик с модулем сравнения и делителем частоты
Счетчик реального времени с отдельным генератором
Шесть каналов PWM (аналог ЦАП)
6-канальный АЦП со встроенным датчиком температуры
Программируемый последовательный порт USART
Последовательные интерфейсы SPI и I2C
Программируемый сторожевой таймер с отдельным внутренним генератором
Внутренняя схема сравнения напряжений (компаратор)
Блок обработки прерываний и пробуждения при изменении напряжений
Специальные функции микроконтроллера:
Сброс при включении питания и программное распознавание снижения питания
Внутренний калибруемый генератор тактовых импульсов
Обработка внутренних и внешних прерываний 6 режимов сна
208.
Выводы микроконтроллера ATMega209.
Назначение выводов ATMega210.
Архитектура контроллеров семейства AVR211.
Архитектура контроллеров семейства AVRПроцессорное ядро (Central Processing Unit – CPU)
AVR-микроконтроллеров содержит:
1. Арифметико-логическое устройство (АЛУ).
2. Регистры общего назначения (РОН).
3. Программный счётчик.
4. Указатель стека.
5. Регистр состояния.
6. Регистр команд.
7. Дешифратор команд.
8. Схему управления выполнением команд.
212.
Архитектура контроллеров семейства AVRВ АЛУ выполняются все вычислительные операции. Операции
производятся только над содержимым РОН. На выборку содержимого
регистров, выполнение операции и запись результата обратно в РОН
затрачивается один машинный такт (один период тактовой частоты).
Регистры общего назначения представляют собой 8-разрядные
ячейки памяти с быстрым доступом, непосредственно доступные АЛУ. В
AVR-микро-контроллерах имеется 32 РОН.
Программный счётчик (Program Counter – PC) содержит адрес
следующей выполняемой команды.
Указатель стека (Stack Pointer – SP) служит для хранения адреса
вершины стека.
Регистр состояния (Status Register – SREG) содержит слово состояния
процессора.
Регистр команд, дешифратор команд и схема управления
выполнением команд обеспечивают выборку из памяти программ
команды, адрес которой содержится в программном счётчике, её
декодирование, определение способа доступа к указанным в команде
аргументам и собственно выполнение команды.
213.
Архитектура контроллеров семейства AVRПамять AVR-микроконтроллеров организована по схеме гарвардского
типа – адресные пространства памяти программ и памяти данных
разделены.
Память программ представляет собой перепрограммируемое ПЗУ типа
FLASH и выполнена в виде последовательности 16-разрядных ячеек, так
как большинство команд AVR-микроконтроллера являются 16разрядными словами.
Оперативная память данных представляет собой статическое ОЗУ
(SRAM – Static Random-Access Memory) и организована как
последовательность 8-разрядных ячеек. Оперативная память данных
может быть внутренней (до 16 Kбайт) и внешней (до 64 Кбайт).
Энергонезависимая (nonvolatile) память данных организована как
последовательность 8-разрядных ячеек и представляет собой перепрограммируемое ПЗУ с электрическим стиранием (РПЗУ-ЭС, или EEPROM –
Electrically Erasable Programmable Read-only Memory). Энергонезависимая
память данных имеет размер до 64 Кбайт.
Регистры ввода-вывода предназначены для управления процессорным ядром и периферийными устройствами AVR-микроконтроллера.
Схема прерываний обеспечивает возможность асинхронного прерывания процесса выполнения программы при определённых условиях.
214.
Обобщенная карта памяти МК AVRРОН, регистры ввода-вывода и оперативная память данных
образуют единое адресное пространство. Адресное пространство – это
множество доступных ячеек памяти, различимых по адресам; адресом
называется число, однозначно идентифицирующее ячейку памяти
(регистр). Адреса ячеек памяти традиционно записываются в
шестнадцатеричной системе счисления, на что указывает знак $ в
обозначении адреса
Память программ
Память данных
215.
Память данныхПамять данных предназначена для записи/чтения данных. Является
энергозависимой, то есть, при отключении питания микроконтроллера все
хранимые в ней данные, будут потеряны. Начальный адрес SRAM – 0x100, а
верхний адрес – разный в различных устройствах.
Память программ
Память программ реализована по технологии Flash–EPROM, является
энергонезависимой, подразумевает программирование пользователем и cтирание
электрическим способом. Размер этой памяти варьируется в зависимости от
микроконтроллера и обычно составляет несколько Кбайт командных слов.
Адресация команд в памяти программ реализуется с помощью специального
регистра – счетчика команд, разрядность которого определяет допустимый размер
этой памяти. Для программирования необходим программатор.
Память EEPROM микроконтроллеров AVR
Встроенная
память
EEPROM
–
электрически
перезаписываемая
энергонезависимая память, медленнодействующая и имеет ограниченный цикл
перезаписи.
Память EEPROM используют для хранения данных, которые не должны быть
потеряны даже при потере питания. Запись/чтение памяти EEPROM доступна
программно и допускает побайтную передачу данных с помощью регистра
управления EECR, регистра данных EEDR и регистровой пары EEARL, EEARH,
определяющей адрес ячейки памяти
216.
Регистры общего назначения (РОН)РОН
(R0…R31)
могут
использоваться в программе для
хранения данных, адресов, констант и
другой информации. Шесть старших
регистров объединены попарно и
составляют
три
16-разрядных
регистра Х [R27:R26], Y [R29:R28] и Z
[R31:R30]
В микроконтроллерах AVR она
состоит из 32 восьмиразрядных
регистров (диапазон адресов 0x000 –
0x01F).
В программах, написанных на
языке
С,
непосредственное
обращение к регистрам общего
назначения обычно не требуется.
217.
Регистр состояния SREGРегистр состояния содержит флаги условий микроконтроллеров AVR и
располагается в области ввода/вывода по адресу $3F (адрес SRAM –
$5F). После подачи сигнала сброса он инициализируется нулями.
218.
разряд 0 (С) – флаг переноса (Carry); указывает на переполнение(перенос)после выполнения арифметической или логической операции;
разряд 1 (Z) – нулевой флаг (Zero); всегда устанавливается, если результат
арифметической или логической операции равен нулю; сбрасывается, если
результат операции не равен нулю;
разряд 2 (N) – флаг отрицательного результата (Negative); указывает на
отрицательный результат после выполнения арифметической или логической
операции;
• разряд 3 (V) – флаг переполнения при вычислениях в дополнительных кодах
(Two's complement Overflow); поддерживает арифметику дополнительных
кодов (арифметика кодов с дополнением до двух); устанавливается, если при
выполнении соответствующей операции происходит переполнение, в противном
случае – сбрасывается;
• разряд 4 (S) – флаг знака (Sign); S = N V – связь флагов N и V с помощью
операции "Исключающее ИЛИ"; флаг знака может применяться для
определения фактического результата арифметической операции;
• разряд 5 (Н) – флаг половинного переноса (Half Carry); указывает на
переполнение в младшем полубайте (разряды 0...3 байта данных);
устанавливается, когда происходит перенос из младшего полубайта в старший,
в противном случае – сбрасывается;
• разряд 6 (Т) – флаг копирования (Transfer or Copy); предназначен для
свободного применения программистом (например, в качестве буфера);
• разряд 7 (I) – общее разрешение прерываний (Global Interrupt); если
прерывания, как таковые, должны быть разрешены, то должен быть установлен
разряд 7 регистра состояния (в лог. 1).
219.
СтекСтек – это особая область памяти данных, используемая
процессором для временного хранения адресов возврата из подпрограмм,
промежуточных результатов вычислений и др. Для микроконтроллеров
AVR компиляторы языка С (например, при обращении к подпрограммам)
могут также создавать один или более стеков программно, начиная с
верхних адресов области SRAM.
Стек действует по принципу LIFO – "Last In, First Out", что означает
"последним вошел, первым вышел". Это означает, что новые данные
вначале помещаются на вершину (первый уровень) стека, а затем, с
поступлением следующих данных, "проталкиваются" на его нижние
уровни. Извлечение из стека происходит в обратном порядке: вначале
считываются данные, помещенные последними на вершину, после чего
данные, размещенные на нижних уровнях, как бы "выталкиваются" на один
уровень вверх.
Ячейка памяти, которая является в данный момент вершиной
стека, адресуется указателем стека (для AVR – регистровой парой SPL,
SPH).
220.
Архитектура контроллеров семейства AVRК периферийным устройствам AVR-микроконтроллера относятся:
1. Порты ввода-вывода (I/O).
2. Таймеры (TIMERS).
3. Счётчики (COUNTERS).
4. Сторожевой таймер (WDT).
5. Аналоговый компаратор (AC).
6. Аналого-цифровой преобразователь (A/D CONVERTER, ADC).
7. Универсальный асинхронный (синхронно-асинхронный)
приёмопередатчик – УАПП (УСАПП) (UART или USART),
8. Последовательный периферийный интерфейс SPI.
9. Двухпроводной последовательный интерфейс I2C.
221.
Порты ввода-выводаВсе периферийные устройства адресуются через регистры
ввода-вывода (, IO registers). В архитектуре АVR, как и в других
архитектурах МК, термин «порты ввода-вывода» обозначает
параллельные порты для обмена данными с внешними устройствами.
Портов ввода-вывода в разных моделях может быть от 1 до 7.
Номинально порты 8-разрядные.
Для сокращения числа контактов корпуса в подавляющем
большинстве случаев внешние выводы, соответствующие портам,
кроме своей основной функции (двунаправленного ввода-вывода) несут
также и дополнительную, переключаются программным способом.
Выводы портов в достаточной степени автономны, и их режим может
устанавливаться независимо друг от друга. По умолчанию при
включении питания все дополнительные устройства отключены, а порты
работают на вход, причем находятся в состоянии с высоким
импедансом.
222.
Порты ввода-выводаРегистр DDR настраивает
режим работы вывода. Если
в нем единица, то
переключатель замкнут и на
ногу выводится состояние
регистра PORT.
Если вывод настроен на выход, то в регистре PIN окажется то же самое,
что и в регистре PORT. Но если мы запишем в регистр DDR логический
ноль, то переключатель выключится и усилитель будет отвязан от входа.
Это значит, что можно будет подать произвольный логический сигнал на
вывод и контролировать по средствам регистра PIN.
Резистор необходим для подтяжки состояния вывода на тот случай,
если вывод ни к чему не подключен. Если записать в регистр PORT "1",
то вывод будет подтянут к напряжению питания и из регистра PIN вы
прочитаете логическую единицу,
223.
Порты ввода-выводаЦифровой логический входной контакт P0.5 может переключаться с
логической 1 или High на логическую 0 или Low с помощью
переключателя SW1. Резистор R1 действует как подтягивающий
резистор. Он связан с логическим напряжением от источника питания 5В.
Таким образом, когда переключатель не нажат, на контакт логического
входа всегда подается напряжение по умолчанию 5 В, если контакт
закорочен на землю, то логический уровень станет низким (Low).
Контакт не может быть напрямую
закорочен на землю или питание,
поскольку это приведет к
повреждению цепи из-за короткого
замыканию.
Если мы не используем этот
подтягивающий резистор, выход
будет непосредственно закорочен
на землю при нажатии
переключателя, с другой стороны,
когда переключатель будет
разомкнут, вывод логического
уровня будет плавать.
224.
Таймеры-счетчикиСчетчики предназначены для подсчета импульсов,
поступающих на отдельные входы.
Таймеры предназначены для формирования импульсов
заданной длины.
При переполнении счетчика возникает событие, которое может
вызывать соответствующее прерывание. 8-разрядный счетчик TimerO в
большинстве случаев этой функцией и ограничивается. Счетчик Timer2,
если он имеется, может также вызывать прерывание по совпадению
подсчитанного значения с некоторой заранее заданной
величиной. 16-разрядные счетчики - более «продвинутая» штука, и
могут вызывать прерывания по совпадению с двумя независимо
заданными .числами А и В. При этом счетчики могут обнуляться или
продолжать счет, а на специальных выводах- генерироваться импульсы
(аппаратно, без участия программы).
Все счетчики-таймеры допускают работу в так называемых
режимах РWМ (ШИМ).
Кроме таймеров-счетчиков, во всех без исключения АVRконтроллерах есть сторожевой (WatchDog) таймер. Он предназначен в
основном для вывода МК из режима энергосбережения через
определенный интервал времени, но может служить и для аварийного
перезапуска МК.
225.
Таймеры-счетчикиВ принципе таймер это простой счетчик. Его достоинство в том, что он может
считать импульсы входной частоты и работать независимо от основного потока
выполнения программы. Строго заданная частота тактирования делает
возможным измерять интервалы времени в единицах периода тактов таймера.
Почему существуют разные таймеры? Ответ очень прост: для создания
подходящего таймера для разных задач нужны некоторые разные (аппаратные)
ресурсы.
Обычно в микроконтроллерах серий 90S, megaAVR и tinyAVR имеется два 8битных таймера и один 16-битный. Таймер, у которого 16-битное разрешение,
обычно более гибок в настройке и обладает расширенным функционалом в
сравнении с 8-битным таймером. Однако правило "чем больше тем лучше" не
всегда справедливо для мира микроконтроллеров, когда нужно решить
узкоспециализированную задачу. Для многих приложений достаточно 8разрядной разрешающей способности. Использование разрядности выше
означает увеличение затрат на вычисления, увеличение времени обработки, и
этого нужно пытаться избегать путем оптимизации кода по скорости. Это также
означает, что нужно применять более дорогой микроконтроллер. Гибкость
таймеров AVR позволяет приспособить их для решения различных задач.
Количество таймеров определяет количество различных конфигураций.
226.
Использование ШИМ (PWM)У микроконтроллера есть
встроенные таймеры, которые и
управляют формированием
ШИМ-сигнала. Для
использования достаточно
правильно настроить таймер и
затем для формирования
сигнала потребуется только
изменять состояние одного
регистра.
227.
Генерирование ШИМ (PWM)Предположим, в регистр
OCR1A записано
значение "100".
Тактовый сигнал у нас
задан без делителя.
Период следования
тактовых импульсов
1/16МГц = 62,5нс. С
каждым новым тактом,
состояние регистра
TCNT1 увеличивается на
единицу.
При это постоянно происходит его сравнение с регистрами OCR1A и ICR1. Как
только он досчитывает до OCR1A происходит переключение состояния вывода
из "1" в "0". При достижении значения ICR1 состояние TCNT1 сбрасывается в
ноль, на выводе снова выставляется "1" и начинается следующий период
сигнала. Период следования импульсов в проекте: 255*62,5 = 15937,5нс.
Примерно 16мкс. Частота при этом 62,5кГц. Это очень большая частота и
снизить ее можно увеличив делитель или/и значение ICR1.
В итоге, чтобы изменить скважность сигнала остается только записать новое
значение в регистр OCR1.
228.
Сторожевой таймер (Watchdog Timer)Watchdog Timer (WDT) — это сторожевой таймер, который представляет собой
аппаратно-реализованную схему контроля над зависанием системы. Это таймер,
который периодически сбрасывается контролируемой системой. Если вдруг
сброса не произошло за определённый интервал времени после предыдущего
сброса данного таймера, то происходит принудительная перезагрузка
микроконтроллера.
Например, ожидается ответ от какойнибудь шины например I2C, в виде
отслеживания состояния определённого бита регистра. И вдруг
произойдёт кратковременное
отсоединение провода этой шины.
После этого скорей всего произойдёт
зависание программы, так как в шине
будет сбой, и даже если что-то после и
придёт от присоединённого узла, то
мы вряд ли уже это отследим
изменением состояния бита.
Желательно, чтобы после какого-то
таймаута система перезагрузилась.
Структурная схема
Тут-то и приходит на помощь WDT,
сторожевого таймера
который установлен на определённый
интервал.
229.
Аналоговый компараторАналоговый компаратор – электронная схема, принимающая на свои
входы два аналоговых сигнала и выдающая логический «0» или «1», в
зависимости от того, какой из сигналов больше.
Два входа для подачи аналоговых сигналов носят
названия неинвертирующий (+) и инвертирующий (-). Если на
неинвертирующем входе напряжение больше, чем на инвертирующем, выходной
сигнал равен логической «1», иначе – логическому «0».
Будучи включенным, компаратор позволяет сравнивать напряжения,
присутствующих на соответствующих входах микроконтроллера.
Результатом сравнения является логическое значение, которое может быть
прочитано внутри программы. По результату сравнения может быть
сгенерировано прерывание, а также осуществлен захват состояния таймерасчетчика.
Чтобы выводы микроконтроллера, обладающие соответствующей
альтернативной функцией, можно было использовать аналоговым компаратором,
они должны быть сконфигурированы как аналоговые входы.
230.
Аналого-цифровой преобразовательАналого-цифровой преобразователь (АЦП) – это
устройство, преобразующее входной аналоговый сигнал в
дискретный код (цифровой сигнал).
В качестве аналогового сигнала может выступать любая
физическая непрерывно меняющаяся величина. Чаще
всего в качестве входного сигнала используется
эквивалентный сигнал напряжения для получения
цифровой информации о температуре, токе, влажности.
Большинство аналого-цифровых преобразователей
являются линейными, то есть диапазон входных значений,
отображаемый на выходное цифровое значение, связан по
линейному закону с этим выходным значением. Основой
построения АЦП является аналоговый компаратор.
Разрешение АЦП – минимальное изменение
величины аналогового сигнала, которое может быть
преобразовано данным АЦП. Обычно измеряется в
вольтах.
231.
Аналого-цифровой преобразовательРазрядность АЦП характеризует количество дискретных значений,
которые преобразователь может выдать на выходе. Измеряется в битах.
Например, АЦП, способный выдать 28=256 дискретных значений (0..255),
имеет разрядность 8 бит.
232.
Аналого-цифровой преобразовательРазрешение по напряжению равно разности напряжений, соответствующих
максимальному и минимальному выходному коду, делённой на количество
выходных дискретных значений.
где N – разрядность АЦП.
При этом напряжение на входе преобразователя можно оценить, зная
полученное цифровое значение аналого-цифрового преобразования Value
На практике разрешение АЦП ограничено отношением сигнал-шум входного
сигнала. При большой интенсивности шумов на входе АЦП различение
соседних уровней входного сигнала становится невозможным, то есть
ухудшается разрешение. При этом реально достижимое разрешение
описывается эффективной разрядностью (effective number of bits —
ENOB), которая меньше, чем реальная разрядность АЦП. При
преобразовании сильно зашумленного сигнала младшие биты выходного
кода практически бесполезны, так как содержат шум.
233.
Аналого-цифровой преобразовательДискретизацией сигнала называется измерительное преобразование
непрерывного сигнала x(t) в последовательность мгновенных значений этого
сигнала X(kiT), соответствующих определенным моментам времени kiT (T – шаг
дискретизации).
Частота дискретизации – частота, с которой
производится аналогоцифровое преобразование
сигнала.
Время преобразования –
время от начала преобразования до появления на
выходе АЦП соответствующего кода.
Опорное напряжение– напряжение, соответствующее максимальному
выходному коду.
Поскольку реальные АЦП не могут произвести аналого-цифровое
преобразование мгновенно, входное аналоговое значение должно
удерживаться постоянным от начала до конца процесса преобразования. Эта
задача может решаться путем использования специальной схемы на входе
АЦП – устройства выборки-хранения (УВХ).
234.
Аналого-цифровой преобразовательАЦП входит во многие современные модели МК
АVR, и в том числе может использоваться для замены
функций более простого в обращении, но менее
функционального аналогового компаратора. АЦП в
АVR - многоканальный.
Разрешающая способность АЦП в МК АVR - 10
двоичных разрядов, чего для большинства типовых
применений достаточно (около 0,1% шкалы).
Отметим также, что АЦП может работать в двух
режимах: одиночного и непрерывного
преобразования.
235.
Последовательные портыПоследовательные порты называют так потому,
что в них в каждый момент времени передается
только один бит. Самое главное преимущество
последовательных портов перед параллельными снижение числа соединений.
В микроконтроллерных устройствах с малыми
объемами данных скорость передачи.
Практически любой последовательный порт можно
имитировать программно, используя
обычные выводы МК. Когда-то так и поступали даже в
случае самого популярного из таких портов - UART.
Однако с тех пор МК обзавелись аппаратными
последовательными портами.
236.
UART (Universal Asynchronous Receiver-Transmitter)В компьютерах есть СОМ-порт, часто ошибочно
называемый портом RS-232. Правильно сказать так:
СОМ-порт передает данные, основываясь на
стандарте последовательного интерфейса RS-232.
Последний, кроме собственно протокола
передачи, стандартизирует также и электрические
параметры, и разъемы DB-9 и DB-25. UART основная часть любого устройства, поддерживающего
RS-232, но и не только его - например, стандарты RS485 и RS-422 также реализовываются через UART, т.
к. они отличаются от RS-232 только электрическими
параметрами и допустимыми скоростями.
Кроме UART, в конкретный порт (в том числе в
СОМ-порт ПК) обычно входит схема преобразования
логических уровней в уровни соответствующего
стандарта.
237.
UARTДиаграмма передачи данных по последовательному интерфейсу в RS232 формате 8n2
238.
Интерфейс SPI (Serial Peripheral Interface)В интерфейсе SPI синхронизирующие импульсы передают по отдельной,
специально выделенной линии.
Названия линий SPI - информационные линии MISO (Master In Slave Out),
MOSI (Master Out Slave ln) и линия для подачи тактовых импульсов
SCK.
В интерфейсе SPI одноименные выводы MISO и MOSI соединяются
между собой, а направление передачи задается выбором режима «ведущий ведомый.
Четвертый провод в является аналогом «выбора кристалла» и носит
название SS (Slave Select- выбор ведомого).
Никаких стартовых и стоповых битов в SPI не предусматривается, и
если обмен непрерывный, то выделить начало байта, чтобы синхронизировать
чтение/запись, невозможно. Поэтому обычно на время чтения генератор
приостанавливают и заодно подают сигнал высокого уровня на SS (если этот
вывод задействован), чтобы остановить ведомый и привести его в исходное
состояние.
239.
Интерфейс SPI (Serial Peripheral Interface)Схема передачи данных по SPI
240.
Интерфейс ТWI (I2С)Интерфейс I2C, требует двухпроводного соединения, но с
обязательным объединением «земель».
В интерфейсе I2С устройства могут работать в режиме
«ведущий» (Master) или «ведомый» (Slave).
В отличие от большинства других интерфейсов, ведомые
устройства с интерфейсом I2C должны иметь индивидуальный
адрес, присваиваемый производителем.
I2С, как и SPI, как правило, служит для связи между собой
микросхем на одной плате или в пределах одного устройства.
Однако это значительно более медленный интерфейс (типовое
значение скорости обмена- 100 кбит/с), и потому применяется там,
где не требуется скоростной передачи данных.
Существуют устройства (например, датчики температуры
фирмы Dallas Semiconductor, которые способны работать без
питания, получая его от сигнальных линий интерфейса I2С.
241.
ПрерыванияПрерывание (interrupt) – событие, требующие немедленной реакции со
стороны процессора. Реакция состоит в том, что процессор прерывает
обработку текущей программы (прерываемой программы) и переходит
к выполнению некоторой другой программы (прерывающей
программы), специально предназначенной для данного события. По
завершении этой программы процессор возвращается к выполнению
прерванной программы.
Каждое событие, требующее прерывания,
сопровождается сигналом прерывания,
оповещающим об этом вычислительную
машину, и называемым запросом
прерывания.
В МК все nрерывания аппаратные, делятся на
внутренние и внешние.
Внутренние прерывания могут возникать от
любого устройства, дополнительного
по отношению к ядру системы: таймеров,
аналогового компаратора, последовательного.
порта и т. п. Внешних прерываний у АTmega два.
Внешнее прерывание наступает при наличии
сигнала на одном из входов INT0 или INТ1.
242.
ПрерыванияСостояние программы представляет собой совокупность состояний всех
запоминающих элементов после выполнения последней команды. При
возникновении прерывания микроконтроллер сохраняет в стеке содержимое
счетчика команд и загружает в него адрес соответствующего вектора
прерывания. Последней командой подпрограммы обработки прерывания
должна быть команда, которая осуществляет возврат в основную программу и
восстановление предварительно сохраненного счетчика команд. Во время
выполнения обработчика прерывания некоторая информация может
подвергнуться изменению. Поэтому при переходе к обработчику прерывания
необходимо сохранить элементы, подвергающиеся изменению. Набор таких
элементов представляет собой вектор состояния программы.
Вектор прерывания является вектором начального состояния прерывающей
программы (обработчика) и содержит всю необходимую информацию для
перехода к обработчику, в том числе его начальный адрес. Каждому типу
прерываний соответствует свой вектор прерывания, который инициализирует
выполнение соответствующего обработчика. Обычно векторы прерывания
хранятся в специально выделенных фиксированных ячейках памяти с
короткими адресами, представляющих собой таблицу векторов
прерываний. Для перехода к соответствующей прерывающей программе
процессор должен располагать вектором прерывания и адресом этого вектора.
По этому адресу, как правило, находится команда безусловного перехода к
подпрограмме обработки прерывания.
243.
ПрерыванияПри наличии нескольких источников запросов должен быть установлен
определенный порядок обслуживания поступающих запросов,
называемый приоритетными соотношениями. Приоритет определяет, какой
из нескольких запросов, поступивших одновременно, подлежит обработке в
первую очередь, и имеет ли право данный запрос прерывать тот или иной
обработчик прерывания.
Если во время обработки
прерывания поступает запрос
на прерывание с более
высоким уровнем приоритета,
управление передается
обработчику прерывания
более высокого приоритета,
при этом работа обработчика
прерывания с более низким
уровнем приоритета
приостанавливается.
Максимальное число
программ, которые могут
приостанавливать друг друга
называется глубиной
прерываний.
244.
ПрерыванияМаскирование прерываний используется для сообщения микроконтроллеру о
необходимости реагировать на каждый тип прерывания или игнорировать
его. Маска прерывания представляет двоичный код, разряды которого
поставлены в соответствие источникам запроса прерываний. Единичный бит в
двоичном коде сообщает микроконтроллеру о необходимости обработки
прерываний такого типа. Нулевой бит напротив не позволяет микроконтроллеру
переходить к обработке прерываний указанного типа.
Как правило, кроме маскирования прерываний, существует также бит глобального
разрешения прерываний, нулевое значение которого отключает все обработчики
прерываний (кроме аппаратного сброса и перехода к началу исполняемой
программы).
Кроме двоичного кода маски прерываний существует также двоичный
код флагов прерываний, который позволяет обработчику прерываний
установить источник возникновения прерывания в случае если источников с
указанным запросом в микроконтроллере несколько.
245.
ПрерыванияДля надлежащего управления этим процессом флаги прерываний образуют
иерархию.
Во главе данной структуры стоит бит I регистра флагов SREG, который
разрешает (если установлен в логическую единицу) или запрещает (если
установлен в логический нуль) аппаратные прерывания вообще. Как правило,
непосредственно с этим битом (как и вообще с регистром SREG) программисту
дело можно не иметь: для общего разрешения (запрещения) прерываний
предусмотрены специальные команды sei (разрешить) и cli (запретить),
устанавливающие данный бит в нужное состояние. Отметим, что по умолчанию
бит I регистра флагов SREG сброшен, т. е. прерывания при запуске МК
запрещены. Для того чтобы их разрешить, необходимо в процедуре начальной
инициализации, выполняющейся по сбросу МК," разместить команду sei.
Кроме общего флага прерываний, для каждого конкретного прерывания имеется
свой разрешающий/запрещающий бит, расположенный в соответствующем
регистре (например, для таймеров это регистры ТIМSК или ЕТ IМSК, для
внешних прерываний- GIМSК). Для разрешения прерываний указанные биты
необходимо устанавливать в состояние логической единицы, в противном случае
автоматического вызова прерываний не произойдет.
246.
ПрерыванияОбщая схема обработки аппаратных прерываний следующая. При
возникновении любого прерывания флаг I регистра SREG аппаратно
сбрасывается, тем самым запрещая обработку других прерываний. При
нормальном течении событий он автоматически устанавливается опять, когда
обработка прерывания заканчивается (по команде reti).
После сброса флага I контроллер определяет, запрос на обработку
какого именно прерывания произошел, - это делается по флагу конкретного
прерывания, который также автоматически устанавливается при возникновении
прерывания (например, флаги для прерываний таймеров находятся в регистре
TIFR или ETIFR, для внешних прерываний- в регистре GIFR или EFI R и т.п.).
После определения типа прерывания контроллер автоматически
вычисляет адрес соответствующего вектора прерывания (векторы обычно
располагаются по начальным адресам памяти программ). На этом месте должна
располагаться команда jmp, которая содержит адрес (вектор процедурыобработчика.
Перед тем как перейти по вектору прерывания, МК сбрасывает флаг
прерывания и автоматически сохраняет содержимое счетчика команд в стеке.
Заканчиваться процедура-обработчик должна командой выхода из
прерывания reti, восстанавливающей содержимое счетчика команд и снова
устанавливающей общий флаг разрешения прерываний.
247.
ПР
Е
Р
Ы
В
А
Н
И
я
248.
Режимы энергосбережения1. IDLE MODE (режим ожидания)- режим, в котором останавливается GPU (а
также устройство управления выборкой команд из памяти). Все периферийные
устройства(таймеры, АЦП, порты) продолжают функционировать. Поэтому
значительной экономии не получается: потребление снижается лишь на 30-50%.
Очевидно, что режим Idle целесообразен, когда общее потребление устройства
лимитирует именно МК, который при этом обязательно должен находиться в
состоянии постоянной готовности. Во всех остальных случаях следует выбирать
режимы «глубокого)) энергосбережения, когда собственное потребление МК
снижается до единиц или десятков микроампер.
2.POWER DOWN MODE - режим, общий для всех моделей МК. В нем
останавливаются все узлы МК, за исключением сторожевого таймера, системы
обработки внешних асинхронных прерываний и модуля ·тw1. Соответственно,
выход из данного режима возможен либо по сбросу МК (в том числе и от
сторожевого таймера), либо от прерывания TWI, либо от внешнего прерывания.
Важная особенность Power Down mode - остановка тактового генератора.
3. POWER SAVE MODE - таймер продолжит работу и в этом режиме.
Практически используется при реализации часов реального времени.
4. STANDBY MODE - отличается от Power Down тем, что в этом режиме
продолжает работать тактовый генератор (только при установке внешнего
резонатора). Режим полезен тем, что позволяет выходить из «спящего»
состояния всего за 6 тактов.
249.
Программная модель AVRмикроконтроллеров250.
Система команд AVR-микроконтроллеровСистема команд (instruction set) микропроцессора
представляет собой совокупность выполняемых микропроцессором операций и правила их кодирования в
программе.
Система команд AVR-микроконтроллеров включает
команды (инструкции) арифметических и логических
операций,
команды
ветвления,
управляющие
последовательностью выполнения программы, команды
передачи данных и команды операций с битами.
Всего
инструкций.
в
систему
команд
входит
более
130
251.
Система команд AVR-микроконтроллеров252.
Система команд AVR-микроконтроллеров253.
Система команд AVR-микроконтроллеров254.
Система команд AVR-микроконтроллеров255.
Способы адресации операндов в AVR-микроконтроллерахСпособ формирования адреса операнда, указание на который
содержится в команде, называется адресацией. С помощью того или иного
способа адресации вычисляется физический адрес, который поступает на
шину адреса процессора для выбора ячейки памяти или регистра,
используемых в команде.
В AVR-микроконтроллерах возможны три типа команд :
безадресные;
одноадресные;
двухадресные.
В первом типе команд присутствует только код операции (КОП),
определяющий выполняемую командой функцию. В командах второго и
третьего типов помимо кода операции содержится адресная часть,
устанавливающая способ доступа соответственно к одному или двум
участвующим в команде операндам (аргументам команды).
В соответствии с типом адресуемой памяти способы адресации в
AVR-микроконтроллерах можно разделить на способы адресации:
РОН и регистров ввода-вывода;
оперативной памяти данных (ОЗУ);
памяти программ
256.
Способы адресации операндов в AVR-микроконтроллерахПрямая регистровая адресация
предусмотрена для адресации РОН и регистров ввода-вывода.
При прямой регистровой адресации РОН операндом является
содержимое регистра общего назначения, указанного в команде. Команды с
прямой регистровой адресацией могут адресовать один (Rd) или два (Rr и Rd)
РОН . Во втором случае результат выполнения команды со-храняется в регистре
Rd. Прямая регистровая адресация РОН применяется во всех арифметических и
логических командах, а также в некоторых командах работы с битами, т. к. эти
команды выполняются в АЛУ только над содержимым РОН. Команды, вторым
операндом которых является константа, могут использовать в качестве первого
операнда только регистры из старшей половины РОН (R16…R31).
При прямой регистровой адресации регистра ввода-вывода операнд
содержится в регистре ввода-вывода, указанном в команде. Адрес регистра вводавывода хранится в шести разрядах слова команды ( где n определяет адрес
регистра-источника или регистра-приёмника в РОН). Прямая регистровая
адресация регистров ввода-вывода используется в командах чтения IN и записи
OUT регистра ввода-вывода, а также в ряде других команд работы с регистрами
ввода-вывода.
257.
Прямая регистровая адресацияПримеры использования прямой регистровой адресации:
Прямая регистровая
адресация одного РОН
Прямая регистровая
адресация двух РОН
Прямая регистровая
адресация регистра
ввода/вывода
258.
Непосредственная адресацияоперативной памяти данных
При непосредственной адресации оперативной памяти данных операндом
является содержимое ячейки ОЗУ, адрес которой указан в команде. Адрес
операнда содержится в 16 младших разрядах 32-разрядной команды (Rr/Rd
определяет адрес регистра-источника или регистра-приёмника в РОН).
Непосредственная адресация используется в команде LDS (Load Direct from Data
Space) загрузки из ОЗУ и в команде STS (Store Direct to Data Space) загрузки в
ОЗУ. Зарезервировать байты в ОЗУ позволяет директива .byte. Для того чтобы на
выделенную область памяти можно было ссылаться, директиве .byte должна
предшествовать метка. Директива .byte имеет один параметр – количество
выделяемых байт и может использоваться только в сегменте данных,
определяемом с помощью директивы .dseg. Задать требуемое размещение
выделяемой области памяти позволяет директива .org. Начало программного
сегмента указывается с помощью директивы .cseg.
259.
Косвенная адресация оперативнойпамяти данных
При косвенной адресации оперативной памяти данных операндом является
содержимое ячейки ОЗУ, адрес которой находится в регистре X, Y или Z.
Косвенная адресация используется в команде LD (Load Indirect) косвенной загрузки
из ОЗУ и команде ST (Store Indirect) косвенной загрузки в ОЗУ. В приведённом
примере использованы функции low и high, возвращающие соответственно
младший и старший байты выражения (в данном случае – адреса ячейки памяти с
символическим именем cnt1).
260.
Косвенная адресация оперативнойпамяти данных со смещением
Адрес операнда в оперативной памяти данных вычисляется путём прибавления к
содержимому регистра Y или Z смещения, указанного в команде. Смещение
содержится в шести разрядах слова команды. Косвенная адресация со смещением
используется в команде LDD (Load Indirect with Displacement) косвенной загрузки из
ОЗУ со смещением и в команде STD (Store Indirect with Displacement) косвенной
загрузки в ОЗУ со смещением.
261.
Косвенная адресация оперативнойпамяти данных с предекрементом
Перед выполнением команды содержимое указанного в команде регистра X, Y или
Z декрементируется (уменьшается на единицу); декрементированное содержимое
регистра X, Y или Z является адресом операнда в оперативной памяти данных.
Косвенная адресация с предекрементом используется в команде LD косвенной
загрузки из ОЗУ и команде ST косвенной загрузки в ОЗУ.
262.
Косвенная адресация оперативнойпамяти данных с постинкрементом
Адресом операнда в оперативной памяти данных является содержимое регистра
X, Y или Z, указанного в команде; после выполнения команды содержимое
регистра X, Y или Z инкрементируется, т. е. увеличивается на единицу. Косвенная
адресация с постинкрементом используется в команде LD косвенной загрузки из
ОЗУ и команде ST косвенной загрузки в ОЗУ.
263.
Непосредственная адресация памятипрограмм
При непосредственной адресации памяти программ
выполнение программы продолжается с адреса, указанного в
команде (FLASHEND – символическое имя адреса последней
ячейки памяти программ). Непосредственная адресация
памяти программ используется в командах JMP и CALL.
264.
Косвенная адресация памяти программПри косвенной адресации памяти программ выполнение
программы продолжается с адреса, содержащегося в
регистре Z, т. е. в программный счётчик загружается
содержимое регистра Z. Косвенная адресация памяти
программ используется в командах IJMP и ICALL.
265.
Относительная адресация памятипрограмм
При
относительной
адресации
памяти
программ
выполнение программы продолжается с адреса (PC + k + 1),
где PC – содержимое программного счётчика; k – указанный в
команде относительный адрес, который может принимать
значения от –2048 до 2047. Относительная адресация памяти
программ используется в командах RJMP и RCALL.
266.
Адресация константы в памяти программПри адресации константы адрес байта константы содержится в регистре Z:
старшие 15 разрядов занимает адрес ячейки памяти программ (от 0 до 32К);
состояние младшего разряда (LSB) определяет выбор младшего (LSB = 0) или
старшего (LSB = 1) байта адресуемой ячейки памяти. Адресация константы в
памяти программ используется в командах LPM (Load Program Memory), которая
загружает адресованный регистром Z байт в указанный в ко-манде регистр. Если
регистр-приёмник не указан (команда используется без операндов), байт
загружается в регистр R0. Команда ELPM (Extended Load Program Memory) служит
для загрузки константы из памяти программ объёмом более 64К слов. При этом
для расширения регистра-указателя Z используется регистр RAMPZ, связанный с
регистром Z.
В
приведённом
примере
использован оператор <<,
выполняющий
сдвиг
операнда влево на указанное
число разрядов.
267.
Адресация константы в памяти программс постинкрементом
адрес байта константы содержится в регистре Z и формируется так же, как и при
адресации константы. Адресованный регистром Z байт загружается в указанный
регистр; после выполнения команды содержимое регистра Z инкрементируется.
Адресация константы в памяти программ с постинкрементом используется в
командах LPM и ELPM.
268.
Реализация типовых структуралгоритмов
Ветвления используются для выполнения различных частей
программы (разделения ветвей алгоритма) в зависимости от некоторых
условий.
В циклах одна и та же операция выполняется над содержимым
нескольких последовательно расположенных в памяти ячеек или
элементов данных.
В циклической программе можно выделить блоки:
1. Блок инициализации, в котором производится присвоение начальных
значений переменным, счётчикам, индексам и указателям. Указатели
представляют собой адреса данных в памяти.
2. Блок обработки, в котором выполняются требуемые вычисления, т. е.
одинаковые повторяющиеся действия над различными последовательно
расположенными в памяти данными.
3. Блок управления циклом, в котором изменяются значения счётчиков и
индексов (указателей) перед выполнением следующей повторяющейся
операции, а также производится проверка условия выхода из цикла.
4. Заключительный блок, в котором производится сохранение
полученных результатов.
269.
Команды безусловных переходовКоманды безусловных переходов JMP, RJMP, IJMP и EIJMP
передают управление по указанному в команде адресу памяти программ.
Команда JMP (Jump – переход) позволяет передавать управление
внутри всего объёма памяти программ.
Команда RJMP (Relative Jump – относительный переход)
обеспечива-ет переход в пределах ±2К слов (±4К байт) относительно
текущего содержимо-го программного счётчика.
По команде IJMP (Indirect Jump – косвенный пере-ход)
выполняется косвенный переход по адресу, указанному регистром Z; максимальное смещение составляет 64К слов (128К байт).
Команда EIJMP (Extend-ed Indirect Jump – расширенный
косвенный переход) обеспечивает косвенный переход по всему объёму
памяти программ; для расширения программного счётчика используется
регистр EIND. При выполнении команд безусловных переходов в
программный счётчик загружается адрес ячейки памяти программ, на
которую передаётся управление.
270.
Команды условных переходовКоманды BRхх (Branch if… – перейти, если …) выполняют
переход по результатам проверки разрядов регистра состояния SREG.
Коды условий (C, Z, N, V, S, H) формируются в регистре состояния при
выполнении арифметических, логических команд и команд работы с
битами и представляют собой признаки результата операции. Разряд С
устанавливается, если при выполнении команды был перенос из старшего
разряда результата. Разряд Z устанавливается, если результат
выполнения команды равен нулю. Разряд N устанавливается, если
старший значащий разряд результата равен 1. Разряд V (overflow –
переполнение) устанавливается, если при выполнении команды
произошло переполнение разрядной сетки числа со знаком. Разряд S = N
⊕ V (sign – знак) правильно показывает знак результата при переполнении
разрядной сетки числа со знаком. Разряд H (half carry – полуперенос)
устанавливается, если при выполнении команды был перенос из третьего
разряда результата.
Для организации ветвлений при сравнении операндов команды
BRхх используются совместно с командами CP (Compare) сравнения
содержимого двух РОН, CPC (Compare with Carry) сравнения с учётом
признака переноса и CPI (Compare with Immediate) сравнения с
константой.
271.
Команды условных переходовК командам условных переходов также относится команда CPSE
(Compare and Skip if Equal – сравнить и пропустить, если равно), которая
сравнивает содержимое двух РОН и пропускает следующую за ней
команду, если содержи-мое одинаково.
Команды SBRS, SBRC, SBIS, SBIC (Skip if Bit in Register [I/O
Register] is Set [Cleared] – пропустить, если разряд в регистре общего
назначения [ввода-вывода] установлен [сброшен]) пропускают следующую
команду в случае выполнения соответствующего условия.
272.
Команды условных переходовПриведен фрагмент программы, в которой число 100 заносится в
ячейки массива из пяти байт. Для проверки условия выхода из цикла и
передачи управления используется команда BRNE. Предел повторений
цикла равен 5, шаг равен –1, параметр цикла (счётчик) содержится в
регистре R16.
273.
Организация подпрограммПоложение подпрограммы в общей структуре программы определяется по
её имени. Имя подпрограммы на ассемблере, задаваемое символической меткой,
является стартовым адресом исполняемой части подпрограммы.
Вызов подпрограммы подразумевает передачу в неё управления ходом выполнения команд. Передача управления осуществляется путём загрузки в программный счётчик (РС) стартового адреса подпрограммы. Для хранения адресов
возврата из подпрограмм используется стек (stack).
Стек – специальным образом организованная последовательность ячеек
памяти с дисциплиной обслуживания LIFO. При занесении в стек новых данных
предыдущие данные сохраняются («опускаются»). Выгружаются из стека
(«поднимаются») данные в обратном порядке. Программный стек (Software Stack)
организуется в оперативной памяти; глубина определяется размером и степенью
использования памяти.
Адрес очередной свободной ячейки стека содержится в специальном
регистре – указателе стека SP (Stack Pointer). При записи в стек число помещается
в ячейку с адресом, содержащимся в указателе стека, после чего содержимое
указателя стека уменьшается на единицу. При чтении из стека производится
выборка содержимого ячейки по адресу, на единицу большему содержимого
указателя стека.
274.
Организация подпрограммМеханизм вызова подпрограммы и возврата в вызывающую программу
Операции записи в стек и чтения из стека
275.
Организация подпрограммВызов
подпрограммы
на
языке
ассемблера
AVRмикроконтроллеров осуществляется командами RCALL, ICALL, CALL и
EICALL. Команда RCALL обеспечивает вызов подпрограммы, с помощью
относительной адресации памяти программ. Команда ICALL производит
косвенный вызов подпрограммы по адресу памяти программ,
содержащемуся в регистре-указателе Z. Команда CALL обеспечивает
вызов подпрограммы из памяти программ с использованием
непосредственной адресации. Команда EICALL позволяет выполнять
косвенный вызов подпрограмм из памяти. При выполнении команд RCALL,
ICALL, CALL и EICALL текущее значение программного счётчика заносится
в стек. Содержимое указателя стека (SPH:SPL) уменьшается на 2.
Для возврата из подпрограмм используется команда RET, при этом
адрес возврата загружается из стека в программный счётчик. При этом
содержимое указателя стека увеличивается на 2.
Стек может также использоваться для сохранения содержимого
РОН на время выполнения подпрограмм. Для сохранения в стеке и
извлечения из стека содержимого РОН служат команды PUSH и POP.
Команда PUSH заносит содержимое регистра в стек по адресу,
хранящемуся в указателе стека. Команда POP выполняет обратные
действия: значение указателя стека увеличивается на единицу.
276.
Организация подпрограммПрограммы с использованием подпрограмм обычно начинаются с команды
относительного перехода к основной программе, в которой прежде всего
производится инициализация стека. Тексты подпрограмм обычно
размещают перед текстом основной программы.
277.
Программирование микроконтроллеровЯзыком ассемблера называется язык программирования, в
котором каждой команде процессора или совокупности команд
процессора
соответствует
сокращённая
символическая
запись
(мнемоника). Использование символического обозначения команд, а
также адресов регистров и ячеек памяти, переменных, констант и других
элементов программы облегчает процесс составления программ.
Язык ассемблера обеспечивает возможность гибкого доступа ко
всем ресурсам программируемого микроконтроллера и позволяет
создавать программы, наиболее эффективные как по быстродействию,
так и по объёму занимаемой программной памяти. В этой связи
программирование на языке ассемблера предполагает знание
архитектуры и свойств микропроцессора. Языки ассемблера являются
машинно-ориентированными и, следовательно, отличаются для разных
типов микропроцессоров.
Языки высокого уровня (С, Паскаль, Бейсик и др.)
обеспечивают доступ ко всем ресурсам микроконтроллера, дают
возможность создавать хорошо структурированные программы, снимают
с программиста заботу о распределении памяти и содержат большой
набор библиотечных функций для выполнения стандартных операций.
278.
Программирование микроконтроллеровНа этапе разработки алгоритма и
структуры программы выбирается метод решения
задачи и разрабатывается алгоритм его реализации.
Алгоритм – это набор правил или описание
последовательности
операций
для
решения
определённой задачи или достижения некоторой
цели. Графическим изображением алгоритма
является схема алгоритма (flowchart), выполняемая
в соответствии с ГОСТ 19.701–90 «Единая система
программной документации. Схемы алгоритмов,
программ, данных и систем. Условные обозначения
и правила выполнения».
На этапе написания исходного текста
программы разработанный алгоритм записывается
в виде программы на исходном языке (ассемблере
или языке высокого уровня).
279.
Программирование микроконтроллеровAVR ASM
AVR C
280.
Программирование микроконтроллеровНа этапе получения выполняемой программы
исходный текст программы с помощью специальных
средств (трансляторов, компиляторов, компоновщиков и
др.) преобразуется в исполняемый код.
Транслятором называют программу, служащую
для перевода (трансляции) программ на языке ассемблера
в машинный код, «понимаемый» процессором.
Компилятор представляет собой программу,
преобразующую в эквивалентный машинный код текст
программы на языке высокого уровня. Результатом работы
транслятора
или
компилятора
может
быть
как
выполняемый загрузочный модуль, так и объектный
модуль (программа, команды, переменные и константы
которой не «привязаны» к конкретным адресам ячеек
памяти).
Для построения выполняемой программы из
объектных модулей применяется компоновщик (редактор
связей, linker).
В процессе получения выполняемой программы
из
исходного
текста
программы
устраняются
синтаксические ошибки, состоящие в нарушении правил
синтаксиса используемого языка программирования.
281.
Программирование микроконтроллеровТестирование служит для обнаружения в
программе ошибок.
После тестирования программа должна быть
подвергнута отладке (debug), задачей которой является
локализация ошибки, т. е. нахождение места в программе,
вызывающего ошибку.
На этапе получения загрузочной программы
производится «освобождение» программы от лишних
фрагментов, использовавшихся для тестирования и
отладки. Далее полученная загрузочная программа
заносится в память микроконтроллера.
По
завершении
процесса
разработки
производится документирование, т. е. составление
комплекта документов, необходимых для эксплуатации и
сопровождения программы. Сопровождение программы
(program maintenance) – это процесс внесения изменений,
исправления
оставшихся
ошибок
и
проведения
консультаций по программе, находящейся в эксплуатации.
Виды программных документов регламентированы ГОСТ
19.101–77 «Единая система программной документации.
Виды программ и программных документов».
282.
Работа в среде AVR StudioAVR Studio содержит:
• редактор исходных текстов,
• транслятор с языка ассемблера,
• отладчик-симулятор.
Транслятор работает с исходными программами на языке ассемблера,
содержащими метки, директивы, команды и комментарии.
Директивы являются инструкциями для транслятора и не заносятся в
исполняемый код программы.
Метка представляет собой символическое обозначение адреса
(последовательность символов, заканчивающаяся двоеточием). Метки
используются для указания места в программе, в которое передаётся
управление при переходах, а также для задания имён переменных.
Команды записываются в программе в виде мнемонического
обозначения выполняемой операции и могут иметь один или несколько
операндов, т. е. аргументов, с которыми они вызываются.
Строка имеет вид
283.
Работа в среде AVR StudioВходным для транслятора является файл <имя_файла>.asm с текстом
программы на языке ассемблера. Транслятор создаёт четыре новых файла:
• файл листинга (<имя_файла>.lst),
• объектный файл (<имя_файла>.obj),
• файл-прошивку памяти программ (<имя_файла>.hex) и
• файл-прошивку энергонезависимой памяти данных (<имя_файла>.eep).
Файл листинга – это отчёт транслятора о своей работе.
Объектный файл имеет специальный формат и используется для
отладки программы с помощью симулятора-отладчика среды AVR Studio.
Файл прошивки памяти программ служит для занесения отлаженной
программы в память программ микроконтроллера.
Файл прошивки EEPROM-памяти данных предназначен для загрузки
информации в энергонезависимую память данных.
Операции загрузки памяти программ и энергонезависимой памяти
данных выполняются с помощью программаторов.
284.
Директивы ассемблера микроконтроллеровсемейства AVR
285.
Описание регистров из области ввода/выводаИмя
регистра
ACSR
UBRR
UCR
USR
UDR
SPCR
SPSR
SPDR
PIND
DDRD
PORTD
PINC
DDRC
PORTC
PINB
DDRB
PORTB
PINA
DDRA
PORTA
EECR
EEDR
EEARL
Адрес
ввода/
вывода
0x08
0x09
0х0А
0x0В
0х0С
0x0D
0х0Е
0x0F
0x10
0x11
0x12
0x13
0x14
0x15
0x16
0x17
0x18
0x19
0x1А
0x1В
0x1С
0x1D
0x1Е
Адрес
SRAM
Описание
0x28
0x29
0х2А
0x2В
0х2С
0x2D
0х2Е
0x2F
0x30
0x31
0x32
0x33
0x34
0x35
0x36
0x37
0x38
0x39
0х3А
0х3В
0х3С
0x3D
0х3Е
Регистр управления и состояния аналогового компаратора
Регистр скорости передачи данных через UART
Регистр управления приемопередатчиком UART
Регистр состояния приемопередатчика UART
Регистр данных приемопередатчика UART
Регистр управления интерфейсом SPI
Регистр состояния интерфейса SPI
Регистр ввода/вывода данных интерфейса SPI
Выводы порта D
Регистр направления передачи данных порта D
Регистр данных порта D
Выводы порта С
Регистр направления передачи данных порта С
Регистр данных порта С
Выводы порта В
Регистр направления передачи данных порта В
Регистр данных порта В
Выводы порта А
Регистр направления передачи данных порта А
Регистр данных порта А
Регистр управления памяти EEPROM
Регистр данных памяти EEPROM
Регистр адреса памяти EEPROM (младший байт)
286.
Описание регистров из области ввода/выводаEEARH
0x1F
0x3F
Регистр адреса памяти EEPROM (старший байт)
WDTCR
0x21
0x41
Регистр управления сторожевым таймером
ICR1L
0x24
0x44
Регистр захвата таймера/счетчика Т/С1 (младший байт)
ICR1H
0x25
0x45
Регистр захвата таймера/счетчика Т/С1 (младший байт)
OCR1BL
0x28
0x48
Регистр сравнения В таймера Т/С1 (младший байт)
OCR1BH
0x29
0x49
Регистр сравнения В таймера Т/С1 (старший байт)
OCR1AL
0х2А
0х4А
Регистр сравнения А таймера Т/С1 (младший байт)
OCR1AH
0x2В
0x4В
Регистр сравнения А таймера Т/С1 (старший байт)
TCNT1L
0х2С
0х4С
Счетный регистр таймера/счетчика Т/С1 (младший байт)
TCNT1H
0x2D
0x4D
Счетный регистр таймера/счетчика Т/С1 (старший байт)
TCCR1B
0x2Е
0х4Е
Регистр управления В таймера/счетчика Т/С1
TCCR1A
0x2F
0x4F
Регистр управления А таймера/счетчика Т/С1
TCNT0
0x32
0x52
Счетный регистр таймера/счетчика Т/С0
TCCR0
0x33
0x53
Регистр управления таймера/счетчика Т/С0
MCUCR
0x35
0x55
Регистр управления микроконтроллером
TIFR
0x38
0x58
Регистр флагов прерываний от таймеров/счетчиков
TIMSK
0x39
0x59
Регистр маскирования прерываний от таймеров
GIFR
0х3А
0х5А
Общий регистр флагов прерываний
GIMSK
0х3В
0x5В
Общий регистр маскирования прерываний
SPL
0x3D
0x5D
Указатель стека (младший байт)
SPH
0х3Е
0х5Е
Указатель стека (старший байт)
SREG
0x3F
0x5F
Регистр состояния
287.
Порты AVR микроконтроллераПорты ввода и вывода, необходимы микроконтроллеру для обмена
данными с различными устройствами. С помощью AVR портов, проводится не
только обмен данными, но и синхронизация схемы.
Количество AVR портов зависит от модели микроконтроллера. (1-7)
портов. Порты AVR восьмиразрядные.
Порты AVR обозначаются латинскими буквами, например, PORTA,
PORTB… PORTG. Каждый вывод – имеет порядковый номер, причем, нумерация
начинается с (0). Если микроконтроллер позволяет использовать 8 разрядов, то
нумерация выглядит так – PB0… PB7.
Выводы портов - могут выполнять также и альтернативные функции..
Если, например, сигнал модуля USART совпал с выводом BP5, то BP4 и BP3,
работают в режимах (SCK, MISO и MOSI), они не могут использоваться как
элементы порта ввода/вывода. Если модуль отключить, эти выводы продолжают
работать как элементы порта.
288.
Управление портами AVR микроконтроллераУправлять любым портом X Можно с помощью трех регистров:
• DDRx;
• PORTx;
• PINx.
The Port X Data Direction Register (DDRx) – регистр направления
передачи данных – определяет, является тот или иной вывод порта
входом или выходом; если некоторый разряд регистра DDRx содержит лог.
0, то соответствующий вывод порта сконфигурирован как вход, в
противном случае – как выход.
The Port X Data Register (PORTx) - регистр порта – если вывод
выполняет роль выхода, то в соответствующий разряд записывается
значение, предназначенное для вывода; если вывод выполняет роль
входа, то лог. 0 в некотором разряде регистра PORTx соответствует
высокоомный вход, а лог. 1 – вход, нагруженный подтягивающим
сопротивлением.
The Port X Input Pins Address (PINx) - регистр выводов порта – в
отличие от регистров DDRx и PORTx доступен только для чтения и
позволяет считать входные данные порта на внутреннюю шину
микроконтроллера.
289.
Управление портами AVR микроконтроллераКаждый бит регистра DDRB отвечает за режим работы
соответствующей
ножки
(PB0-PB7).
Запись
0
в
соответствующий бит, настраивает соответствующую ножку в
режим входа. Можно считывать с неё входящие с внешних
устройств данные. Записав в соответствующий бит 1 мы
установим ножку в режим вывода, что позволит нам
управлять чем либо.
Пример кода на C(Настройка ножки PD4 на вывод):
Пример кода на ASM(Настройка ножки PD4 на вывод):
290.
Управление портами AVR микроконтроллераПример кода на C(Настройка ножки PD4 на вывод):
Пример кода на ASM(Настройка ножки PD4 на вывод):
291.
Управление портами AVR микроконтроллераПри настройке соответствующего вывода на вывод, регистр
PORTB управляет состоянием данной ножки. Установив 1 в
соответствующем бите регистра, подаем логическую 1 на вывод
контроллера, тем самым мы, например, зажигаем светодиод +5v.
Установив 0 в соответствующем бите регистра PORTB, установим
логический 0 на выводе контроллера, тем самым, например, гасим
светодиод.
Пример кода на C(установим ножку PB3 в состояние вывода и подадим на
нее логическую единицу):
Пример кода на ASM(Настройка ножки PD4 на вывод):
292.
Управление портами AVR микроконтроллераПример кода на C(установим ножку PB3 в состояние вывода и подадим на
нее логическую единицу):
Пример кода на ASM(Настройка ножки PD4 на вывод):
293.
Управление портами AVR микроконтроллераПрограмма
чтения
состояния
ключа
и
дублирование
этого
состояния на светодиод
на языках С и ASM
294.
Управление портами AVR микроконтроллера295.
Управление портами AVR микроконтроллера296.
16-ти разрядный таймер/счетчик Т/С1Регистры Т/С1
TCNT1 – счетный регистр (содержимое счетчика);
TCCR1А – регистр управления для определения реакции
выводов
ОС1А/ОС1 – регистры сравнения, используются для
определения совпадения состояния счетчика в регистре TCNT1 с
регистрами сравнения OCR1A/OCR1B, а также для выбора режима
широтно-импульсной модуляции;
TCCR1B – регистр управления для настройки делителя
частоты, для разрешения подачи сигнала сброса для регистра
TCNT1 и для управления захватом;
ICR1 – регистр захвата по входу (при появлении на выводе
ICP фронта входного сигнала, определенного как активный,
текущее состояние счетчика будет перенесено в этот регистр);
OCR1A, OCR1B – регистры сравнения; их содержимое
постоянно сравнивается с состоянием счетчика. В случае
совпадения выполняются действия, определенные регистром
TCCR1A.
297.
16-ти разрядный таймер/счетчик Т/С1Регистры Т/С1
Пара регистров 8 битных регистров TCNT1H и TCNT1L,
вместе образуют 16 битный регистр TCNT1. Данный регистр
открыт как для записи, так и для чтения. При работе таймера
1, значение данного регистра при каждом счете изменяется на
единицу. То есть в регистре TCNT1 записано число тактов,
которые сосчитал таймер. Так же мы можем записать сюда
любое число в диапазоне от 0 до 2 в 16 степени. В таком
случае отсчет тактов будет вестись не с 0, а с записанного
нами числа.
298.
16-ти разрядный таймер/счетчик Т/С1Регистры Т/С1
Регистр TIMSK отвечает за прерывания, генерируемые при
работе таймеров микроконтроллера. Прерывание –
обработчик специального сигнала, поступающего при
изменении чего либо. При возникновении прерывания, ход
основной программы прерывается, и происходит обработка
данного сигнала. За разрешение прерывания переполнения
счетного
регистра
TCNT1
таймера
1
отвечает
бит TOIE1(Timer1 Overflow Interrupt Enable).При записи 1 в
данный бит прерывание разрешено, а при записи 0 –
запрещено. Данное прерывание генерируется таймером 1 при
достижении максимального значения регистра TCNT1.
299.
16-ти разрядный таймер/счетчик Т/С1Регистры Т/С1
Регистр TCCR1B отвечает за конфигурацию таймера 1.
300.
Схема «бегущие огни», программированиена С и ASM
Схема реализует “бегущие огни” из светодиодов.
Поочередно загораются 3 светодиода, с периодом 0.75
секунды (время работы одного светодиода 0.25 секунды).
Бегущие огни реализованы по схеме:
301.
Схема «бегущие огни», программа на С302.
Схема «бегущие огни», программа на ASM303.
ПрерыванияПрерывание — сигнал, сообщающий о наступлении какого либо
события (переполнение счетчика таймера, завершение преобразования АЦП и
т.д.). При этом выполнение текущей последовательности команд прерывается,
и управление передается обработчику прерывания, который в свою очередь
корректно реагирует на событие и обрабатывает его, после чего управление
передается в прерванный код.
Прерывания позволяют своевременно обрабатывать события
периферийных устройств, таких как таймеры, АЦП, приемопередатчики и так
далее.
Внутренние прерывания — обработчики сигналов поступающих
от внутренней периферии контроллера (таймеры, АЦП, UART и т.д.).
Внешние прерывания — обработчики сигналов поступающих от
внешних устройств. Именно внешние прерывания позволяют реализовать
счетчики импульсов, измерять частоту чего либо, а так же быстро реагировать
на события внешних периферийных устройств.
Внешние прерывания происходят при изменении логического уровня
на определенных ножках контроллера.
Очень часто возникает необходимость быстрой обработки нажатия
кнопки. Никто не захочет нажимать и держать кнопку в ожидании реакции
контроллера.
Решить
эту
проблему
позволяют
внешние
прерывания INT0, INT1, возникновение которых возможно при изменении
логического уровня ножек PD2,PD3 микроконтроллера AtMega.
304.
ПрерыванияВ
микроконтроллерах
AVR
за
управление
прерываниями отвечают четыре регистра:
GIMSK (General Interrupt Mask Register) – разрешает
или запрещает внешние прерывания по входу INT0/INT1;
GIFR (General Interrupt Flag Register) – регистр
флагов внешних прерываний;
TIMSK (Timer/Counter Interrupt Mask Register) –
регистр маскирования прерываний от таймера/счетчика
Т/С0 и Т/С1;
TIFR (Timer/Counter Interrupt Flag Register) – регистр
флагов прерываний от таймеров/счетчиков.
305.
ПрерыванияРегистр GIMSK используется для разрешения внешних прерываний.
7
6
5
4
3
2
1
0
INT1
INT0
–
–
–
–
–
–
Состояние внешнего прерывания определяется по регистру GIFR .
7
6
5
4
3
2
1
0
INTF1
INTF0 –
–
–
–
–
–
Регистр
TIMSK
используется
таймеров/счетчиков.
7
для
6
разрешения
5
прерываний
от
2
1
0
TOIE0
–
4 3
TOIE1 OCIE1A OCIE1B – TICIE1 –
Состояние прерываний, имеющих отношение
определяется по регистру TIFR. 7
6
5
к
таймерам/счетчикам
4
3
2
1
ICF1
–
TOV0 –
TOV1 OCF1A OCF1B –
0
Когда разряд TOIE1 и разряд I в регистре состояния SREG установлены в лог.
1, то разрешено прерывание при переполнении Т/С1. В случае переполнения в
регистре TIFR устанавливается флаг TOV1.
Если разряд OCIE1A и разряд I в регистре состояния SREG установлены в лог.
1, то разрешено прерывание при совпадении содержимого регистра сравнения
А с текущим состоянием Т/С1. В случае совпадения, в регистре TIFR
устанавливается флаг OCF1 А.
306.
Векторы прерыванийАдрес в
Источник
памяти
прерывания
Описание
программ
0x0000
RESET
Сигнал сброса
0x0001
INT0
Внешний запрос на прерывание по входу INT0
0x0002
INT1
Внешний запрос на прерывание по входу INT1
0x0003
Т/С1
Захват по таймеру/счетчику Т/С1
0x0004
Т/С1
Совпадение с регистром сравнения А таймера Т/С1
0x0005
Т/С1
Совпадение с регистром сравнения В таймера Т/С1
0x0006
Т/С1
Переполнение таймера/счетчика Т/С1
0x0007
Т/С0
Переполнение таймера/счетчика Т/С0
0x0008
SPI
Завершение передачи данных по интерфейсу SPI
0x0009
UART
Прием байта приемопередатчиком UART завершен
0х000А
UART
Регистр данных приемопередатчика UART пуст
0x000В
UART
Передача данных приемопередатчиком UART завершена
0х000С
ANA_COMP
Прерывание от аналогового компаратора
307.
Векторы прерыванийАдрес в
Источник
памяти
прерывания
Описание
программ
0x0000
RESET
Сигнал сброса
0x0001
INT0
Внешний запрос на прерывание по входу INT0
0x0002
INT1
Внешний запрос на прерывание по входу INT1
0x0003
Т/С1
Захват по таймеру/счетчику Т/С1
0x0004
Т/С1
Совпадение с регистром сравнения А таймера Т/С1
0x0005
Т/С1
Совпадение с регистром сравнения В таймера Т/С1
0x0006
Т/С1
Переполнение таймера/счетчика Т/С1
0x0007
Т/С0
Переполнение таймера/счетчика Т/С0
0x0008
SPI
Завершение передачи данных по интерфейсу SPI
0x0009
UART
Прием байта приемопередатчиком UART завершен
0х000А
UART
Регистр данных приемопередатчика UART пуст
0x000В
UART
Передача данных приемопередатчиком UART завершена
0х000С
ANA_COMP
Прерывание от аналогового компаратора
308.
Схема и программа обработки сигнала скнопки прерыванием INT1
При нажатии кнопки подключенной к выводу PD3 основной цикл программы
прерывается,
и
управление
немедленно
переходит
обработчику
прерывания INT1, который в свою очередь изменяет состояние светодиода.
309.
Программа-обработчик прерывания на С310.
Программа-обработчик прерывания на ASM311.
Встроенный аналоговый компараторВ микроконтроллерах AVR используется встроенный аналоговый
компаратор напряжения, сравнивающий входное напряжение на двух входах.
Как только напряжение на неинвентирующем входе станет больше, чем на
инвентирующем, на выходе компаратора устанавливается лог. 1. Часто
аналоговый компаратор используют для сравнения некоторого входного
напряжения с опорным.
Для активизации компаратора требуется предварительно перевести
соответствующие выводы микроконтроллера в режим входов.
В микроконтроллерах AVR входам компаратора AIN0 и AIN1 обычно
соответствуют разряды 0/1 или 2/3 порта В.
312.
Встроенный аналоговый компараторВ микроконтроллерах AVR для управления работой аналогового
компаратора используется регистр ACSR
7
6
5
4
3
2
1
0
ACD
–
ACO
ACI
ACIE
ACIC
ACIS1
ACIS0
Назначение разрядов регистра ACSR:
ACD – если установлен в лог. 1, питание аналогового компаратора отключено;
АСО – напрямую связан с выходом аналогового компаратора;
ACI – флаг прерываний от аналогового компаратора – устанавливается в лог.
1, когда наступает событие, определенное разрядами ACIS1 и ACIS0;
ACIE – разряд разрешения прерывания от аналогового компаратора;
ACIC – разряд разрешения захвата на входе аналогового компаратора; для
того чтобы можно было вызвать прерывание по захвату, оно должно быть
разрешено разрядом TICIE1 в регистре TIMSK;
ACIS1, ACIS0 – устанавливают вид события на выходе аналогового
компаратора, которое должно вызвать прерывание его работы.
ACIS1 AC1S0
0
0
0
1
1
0
1
1
Вид прерывания аналогового компаратора
Прерывание при изменении состояния выхода (разряда АСО)
Не используется
Прерывание по ниспадающему фронту на выходе аналогового
компаратора (напряжение на AIN1 больше, чем на AIN0)
Прерывание по нарастающему фронту на выходе аналогового
компаратора (напряжение на AIN0 больше, чем на AIN1)
313.
Аналого-цифровой преобразовательАналого-Цифровой преобразователь — устройство,
преобразующее входной аналоговый сигнал в цифровой код.
Преобразование
входного
сигнала
в
численное
представление происходит относительно опорного напряжения
(Vref) . Измерение напряжения производится в диапазоне от 0
до Vref. Весь этот диапазон делится в соответствии с
разрядностью. Если разрядность АЦП — 10 Бит, то диапазон
делится на 1023. Предполагая, что Vref = 5 Вольтам, при
разрядности 10 Бит мы получим шаг измерения 5/1023 = 0.0049
Вольт.
Для получения значения входного напряжения,
необходимо шаг измерения умножить на выходное значение
АЦП.
В микроконтроллерах AVR для управления режимом АЦП
используются два регистра: регистр управления ADCSRA и регистр
мультиплексирования ADMUX (определяет, какие из восьми входов
порта А являются аналоговыми).
314.
Аналого-цифровой преобразовательБиты REFS0-REFS1 отвечают за выбор опорного напряжения.
Бит ADLAR. Определяет порядок записи результатов преобразования в
регистры ADCL и ADCH..
315.
Аналого-цифровой преобразовательБиты MUX0-MUX3 отвечают за выбор входного канала.
316.
Аналого-цифровой преобразовательРегистр ADCSRA микроконтроллеров AVR
Бит ADEN включает и выключает АЦП микроконтроллера.
ADEN = 1 — АЦП включен.
ADEN = 0 — АЦП выключен.
При записи 1 в бит ADSC, в режиме однократного преобразования
запускается преобразование.
Бит ADFR, отвечает за выбор режима преобразования.
ADFR = 1 — Непрерывное преобразование.
ADFR = 0 — Однократное преобразование.
Бит ADIF, флаг окончания преобразования, становится равен 1 при
окончании преобразования
Бит ADIE, разрешает прерывание АЦП.
ADIE = 1 — Прерывание разрешено.
ADIE = 0 — Прерывание запрещено.
Биты ADPS0-ADPS2 отвечают за выбор предделителя между частотой
тактирования микроконтроллера и АЦП.
Результат преобразования помещается в пару регистров ADCH и ADCL.
317.
РАЗНОВИДНОСТИМИКРОКОНТРОЛЛЕРОВ
317
318.
Определения318
319.
Классификация специализированныхпроцессоров
319
320.
Классификация специализированныхпроцессоров
320
321.
Классификация специализированныхпроцессоров
321
322.
Процессоры встраиваемых систем322
323.
Типовая структура процессора длявстроенных систем
323
324.
Процессорное ядро324
325.
Процессорное ядро325
326.
Микроконтроллеры: краткий обзорПервый микроконтроллер
Первый микроконтроллер появился на свет в 1976 году, через 5 лет после
создания первого микропроцессора. Это была микросхема фирмы Intel,
получившая имя 8048.
Помимо центрального процессора, на кристалле находились 1 КБайт памяти
программ, 64 байта памяти данных, два восьмибитных таймера, генератор часов
и 27 портов ввода/вывода.
Микроконтроллеры семейства 8048 использовались в игровых консольных
приставках Magnavox Odyssey, в клавиатурах первых IBM PC и в ряде других
устройств.
Существует также мнение, что первым микроконтроллером был 4-х
pазpядный TMS1000 от Texas Instruments, котоpый содеpжал ОЗУ (32 байта),
ПЗУ (1К), часы и поддеpжку ввода-вывода, что позволяло считать его именно
первым микpоконтpоллеpом. Выпущенный в 1972 году, он имел новую по тем
временам возможность - добавление новых инструкций.
326
327.
Микроконтроллеры: краткий обзор8051
Следующий микроконтроллер Intel 8051, выпущенный в 1980 году, стал
поистине классическим образцом устройств данного класса. Этот 8-битный чип
положил начало целому семейству микроконтроллеров, которые
господствовали на рынке вплоть до недавнего времени.
Аналоги 8051 выпускали советские предприятия в Минске, Киеве, Воронеже,
Новосибирске, на них выросло целое поколение отечественных разработчиков.
Большинство фирм производителей микроконтроллеров и сегодня выпускают
устройства, основанные на этой архитектуре. Среди них Atmel, Maxim, Philips,
Dallas, OKI, Siemens — можно перечислить более полутора десятков имен. Но
51-е семейство сдает свои позиции более молодым и совершенным
микроконтроллерам.
327
328.
Микроконтроллеры: краткий обзорMotorola и Zilog
Другими яркими представителями восьмиразрядных микроконтроллеров
явились изделия компаний Motorola (68HC05, 68HC08, 68HC11) и Zilog (Z8).
Motorola длительное время не предоставляла средств, позволяющих дешево и
быстро начать работать с ее контроллерами, что явно не способствовало их
популярности у некорпоративных разработчиков. Однако стоит заметить, что за
рубежом микроконтроллеры от Motorola занимают лидирующее положение на
рынке. В нашей стране их популярность не очень высока, возможно, еще в силу
отсутствия достаточного количества доступных учебных материалов и средств
разработки.
Микроконтроллеры фирмы Zilog, основанной бывшими сотрудниками Intel,
еще недавно казавшиеся столь многообещающими, не выдержали гонки в
стремительно развивающемся секторе рынка, и сегодня система команд Z8
выглядит достаточно устаревшей.
328
329.
Микроконтроллеры: краткий обзорPIC от Microchip
Первые значительные перемены произошли с появлением PIC-контроллеров фирмы
Microchip. Эти чипы предлагались по рекордно низким ценам, что позволило им в
короткий срок захватить значительную часть рынка микроконтроллеров. К тому же
кристаллы от Microchip оказались не уступающими, а нередко и превосходящими
микроконтроллеры х51 по производительности и не требовали дорогостоящего
программатора.
Вместе с контроллерами появились дешевые комплекты PICSTART, содержащие все, что
было нужно для того, чтобы, не имея ни средств, ни навыков работы с PICконтроллерами, быстро создать и отладить на нем продукт.
Эти микроконтроллеры имели хорошие порты, но все остальное было сделано весьма
неудобно. Архитектура оставляла желать лучшего, система команд была крайне
ограничена. Тем не менее, PIC-контроллеры остаются популярными в тех случаях, когда
требуется создать недорогую систему, не предъявляющую высоких требований по ее
управлению.
329
330.
Микроконтроллеры: краткий обзорAVR от Atmel
Настоящая революция в мире микроконтроллеров произошла в 1996 году, когда
корпорация Atmel представила свое семейство чипов на новом прогрессивном ядре AVR.
Более продуманная архитектура AVR, быстродействие, превосходящее контроллеры
Microchip, привлекательная ценовая политика способствовали оттоку симпатий многих
разработчиков от недавних претендентов на звание контроллера номер 1.
Микроконтроллеры AVR имеют более развитую систему команд, насчитывающую до 133
инструкций, производительность, приближающуюся к 1 MIPS/МГц, Flash ПЗУ программ с
возможностью внутрисхемного перепрограммирования. Многие чипы имеют функцию
самопрограммирования. AVR-архитектура оптимизирована под язык высокого уровня
Си. Кроме того, все кристаллы семейства совместимы "снизу вверх".
330
331.
Микроконтроллеры: краткий обзорAVR от Atmel
Огромную роль сыграла доступность программного обеспечения и средств поддержки
разработки. У Atmel много бесплатно распространяемых программных продуктов.
Хорошо известно, что развитые средства поддержки разработок при освоении и
знакомстве с любым микроконтроллерным семейством играют не менее значимую
роль, чем сами кристаллы. Фирма Atmel уделяет этому вопросу большое внимание и
выпускает чрезвычайно удачную и совершенно бесплатную среду разработки Atmel
Studio, работающую под Windows.
Сторонние производители выпускают полный спектр компиляторов, программаторов,
ассемблеров, отладчиков, разъемов и адаптеров.
Для начинающих разработчиков немаловажным является и то, что для
программирования AVR можно обойтись вовсе без аппаратного программатора. Самым
популярным способом программирования этих микроконтроллеров долгое время
являлись пять проводков, подсоединенных к параллельному порту персонального
компьютера.
Можно считать, что AVR стали еще одним индустриальным стандартом среди
микроконтроллеров общего назначения. Они легкодоступны в России и отличаются в
среднем невысокой стоимостью, успешно конкурируя с микроконтроллерами PIC. Все
331
это делает Atmel AVR одними из самых привлекательных для обучения.
332.
Микроконтроллеры: краткий обзорSTM от STMicroelectronics
Восьмиразрядные микроконтроллеры STM8 были выпущены в 2008 году и
позиционировались для задач, требующих высокой надежности при низком
энергопотреблении. Они сразу обратили на себя внимание невысокой ценой и широким
модельным рядом. Работа с микроконтроллерами STM8 не вызвала никаких сложностей
как у тех, кто уже освоил работу с микроконтроллерами PIC или AVR, так и у
начинающих, и они быстро обрели широкую популярность. STM8 имеют хороший набор
периферии и развитые средства программирования. Небольшим сдерживающим
фактором распространения этих микроконтроллеров в России поначалу стало отсутствие
достаточного количества учебной литературы на русском языке, но сегодня уже
существует множество сайтов с подробными руководствами по освоению этих
микроконтроллеров.
Чуть раньше, в 2004 году, Acorn разработали 32-разрядное процессорное ядро ARM
Cortex-M3 и компания STMicroelectronics стала одной из первых, кто вывел на рынок
семейство микроконтроллеров на этом ядре, получивших название STM32. Сегодня ARM
Cortex-M3 становится, возможно, самым популярным 32-разрядным процессорным
ядром для встраиваемых систем, а микроконтроллеры на его базе имеют
универсальную, хорошо сбалансированную архитектуру. Многие специалисты считают
STM32 одним из самых распространенных, дешевых и перспективных 32-разрядных
332
микроконтроллеров.
333.
Микроконтроллеры: краткий обзорESP32
ESP32 — это микроконтроллер, разработанный компанией Espressif Systems. ESP32
представляет собой систему на кристалле с интегрированным Wi-Fi и Bluetooth
контроллерами. В серии ESP32 используется ядро Tensilica Xtensa LX6. Платы с ESP32
обладают хорошей вычислительной способностью, развитой периферией и при этом
весьма популярны ввиду низкой цены в диапазоне 7$ – 14$.
В основе модуля лежит микросхема ESP32-D0WD-V3. Встроенный чип разработан с
учетом возможности масштабирования и адаптации. Центральный процессор содержит
два ядра, которыми можно управлять индивидуально, а тактовая частота ЦП
регулируется от 80 МГц до 240 МГц. Чип также имеет сопроцессор с низким
энергопотреблением, который можно использовать вместо ЦП для экономии энергии
при выполнении задач, не требующих больших вычислительных мощностей, таких как
мониторинг состояния пинов. ESP32 объединяет богатый набор периферийных
устройств, начиная от емкостных сенсорных датчиков, датчиков Холла, интерфейса SDкарты, Ethernet, высокоскоростного SPI, UART, I²S и I²C.
333
334.
Процессорное ядро MCS-51334
335.
Процессорное ядро MCS-51335
336.
Процессорное ядро MCS-51336
337.
Аналоговый процессор с ядром MCS-51337
338.
Процессорное ядро PIC338
339.
Процессорное ядро PIC339
340.
Процессорное ядро PIC-32Oscillators
Watchdog Timer
Flash and Prefetch
Cache
Digital I/O Ports
Analog Input
Timers and Real-Time
Clock/Calendar (RTCC)
Communications –
UART, SPI, I2C, USB OTG,
PMP, CAN
Input Capture Module
Pulse Width Modulation
(PWM) Module
High-performance DMA
Controller
340
341.
Процессорное ядро AVR341
342.
Разновидности AVRTinyAVR имеет следующие характеристики:
•Flash-память до 16 Кбайт;
•RAM до 512 байт;
•ROM до 512 байт;
•число пинов (ножек) ввода-вывода 4–18;
•небольшой набор периферии.
MegaAVR:
•FLASH до 256 Кбайт;
•RAM до 16 Кбайт;
•ROM до 4 Кбайт;
•число пинов ввода-вывода 23–86;
•расширенная система команд (ассемблер) и периферии.
XMEGA AVR:
•FLASH до 384 Кбайт;
•RAM до 32 Кбайт;
•ROM до 4 Кбайт;
•четырехканальный контроллер DMA (для быстрой работы с памятью и
вводом/выводом);
•«инновационная» система обработки событий.
342
343.
Процессорное ядро ARM343
344.
Процессорное ядро ARM344
345.
Пример МК с ядром ARM (Philips LPC2292)345
346.
Лицензии ARMАрхитектура ARM разработана британской компании Acorn
Computers (ныне ARM Limited)
Сейчас компания ARM Limited занимается лишь разработкой
референсных процессорных архитектур и их
лицензированием.
Созданием конкретных моделей чипов и их последующим
массовым производством занимаются компании лицензиаты
346
347.
Лицензии ARM347
348.
Лицензии ARM348
349.
Микроконтроллеры CortexПод общей торговой маркой Cortex можно увидеть три типа
процессоров, обозначаемых буквами A, R, M. Задачей
профиля A стало достижение большой вычислительной
мощности.
Cortex-A - представляют собой классические
микропроцессоры, являющиеся дальнейшей эволюцией
разработок ARM.
Cortex-R нацелен на использование во встраиваемых
системах, поэтому эти процессоры модернизированы для
исполнения задач в реальном времени.
Cortex-М отличаются простотой и низкой стоимостью. На
сегодняшний день распространение получили 3 варианта
ядер: Cortex-M0, Cortex-M3, Cortex-M4
349
350.
Микроконтроллеры Cortex-М0По своей структуре ядро Cortex-M0 - это конфигурируемый
мультистадийный 32-разрядный RISC процессор. В его
основе лежит архитектура ARMv6-M. Основное отличие
заключается в использовании только набора 16-разрядных
инструкций, под общим названием Thumb. Дополнительно
поддерживаются некоторые команды более нового набора
Thumb2.
Энергопотребление M0 от 73 до 4мкВт/МГц.
Быстродействие ядра Cortex-M0 составляет 0.84 DMIPS /
МГц. Это значит, что на максимальной частоте работы ядра
в 50Мгц, достигается производительность 45 DMIPS.
Данное значение превышает возможности 8-ми разрядных
систем в несколько десятков раз, и на порядок выше, чем у
16-разрядных моделей.
350
351.
Микроконтроллеры Cortex-М3Ядро Cortex-M3 в отличие от M0, основано на архитектуре
ARMv7-M и полностью реализует наборы команд Thumb и
Thumb2. Из особенностей следует упомянуть аппаратное
умножение 32-разрядных чисел за 1 цикл, а также деление
чисел подобной разрядности (от 2 до 12 циклов).
Производительность процессора составляет 1.25DMIPS/МГц.
Энергопотребление примерно в два раза выше, чем у варианта
M0. Количество физических прерываний увеличено до 240. В
ядре предусмотрен механизм защиты памяти.
Cortex-M3, в отличие от классической ARMv7, выполнен по
Гарвардской архитектуре и поддерживает несколько
периферийных шин
351
352.
Микроконтроллеры Cortex-М4Cortex-M4, по сравнению с Cortex-M3, не характеризуется
ростом общих показателей.
Фактически M4 тот же самый M3, но дополнительно
оснащенный DSP-инструкциями. Наличие последних
существенно ускоряет обработку потоковых данных, что в
свою очередь делает M4 весьма привлекательным для
использования в системах управления и обработки
информации.
Возможности DSP, входящего в состав M4, позволяют
параллельно выполнять четыре операции
сложения/вычитания для 8-ми разрядных чисел или две
операции сложения/вычитания с16-ти разрядными
операндами, и т.п.
352
353.
Ядро Cortex-М3Cortex-M3 является
стандартизованным
микроконтроллерным ядром, которое
помимо ЦПУ, содержит все
остальные составляющие основу
микроконтроллера элементы (в т.ч.
система прерываний, системный
таймер SysTick, отладочная система и
карта памяти). 4 гигабайтное
адресное пространство Cortex-M3
разделено на четко распределенные
области кода программы,
статического ОЗУ, устройств вводавывода и системных ресурсов. В
отличие от ядра ARM7, Cortex-M3
выполнено по Гарвардской
архитектуре и имеет несколько шин.
353
354.
Ядро Cortex-М3354
355.
Семейство МК STM32355
356.
Семейство МК STM32356
357.
Семейство МК STM32357
358.
Семейство МК STM32358
359.
МИКРОКОНТРОЛЛЕРESP32
360.
Микроконтроллер ESP32, вышедший на рынок осенью 2015 года,представляет собой выдающееся устройство, и не только благодаря
своей низкой цене. ESP32 — высокоинтегрированный, совмещённый
(Wi-Fi + Bluetooth) чип, выполненный для решений, требующих
минимальных показателей энергопотребления.
ESP32 разработан для носимой электроники, выполнен в суперминиатюрном корпусе 6 х 6 мм, требующий для интеграции около 10-ти
внешних компонентов. Он обладает хорошим функционалом и
многообещающими возможностями. Совмещение в одном чипе WiFi и
Bluetooth, двух процессорных ядер и богатого набора периферии может
сделать ESP32 лидером в своем сегменте.
361.
Программные средства разработки состоят из:1. Компилятор. Компилятор для Xtensa LX106 входит в пакет компиляторов GNU
Compiler Collection. Поскольку компилятор имеет открытые исходные тексты, то
в разных SDK могут содержаться разные сборки этого компилятора, немного
отличающиеся поддерживаемыми опциями.
2. Библиотек для работы с периферией контроллера, стеков протоколов WiFi,
TCP/IP.
3. Средств загрузки исполняемого файла в память программ
микроконтроллера.
4. Опциональной IDE.
362.
Эта плата позволяет быстропрограммировать модуль
благодаря встроенному адаптеру
USB-TTL. На ней также
расположены кнопки
программирования и сброса, а
также регулятор напряжения для
питания микроконтроллера ESP32
напряжением 3.3 В. Также плата
дает удобный доступ к выводам
модуля, шаг между которыми
довольно узок, чтобы без
проблем работать с ними. Шаг же
между выводами платы
составляет 2.54 мм, что является
стандартом для DIP-корпусов, с
которыми удобно работать
обычному радиолюбителю без
специальных инструментов.
363.
Ключевые характеристики ESP32• Встроенный модуль Wi-Fi стандарта
802.11
• Модуль Wi-Fi работает в диапазоне
частот 2,4 ГГц — 2,5 ГГц
• Три режима работы: Точка доступа,
клиент, точка доступа + станция
• Двухъядерный 32-битный
микропроцессор
• Рабочее напряжение 3,3 В
• Тактовая частота от 80 МГц до 240 МГц
• Память SRAM составляет 512 КБ
• Память ПЗУ составляет 448 КБ
• Поддерживается внешняя флэшпамять объемом до 32 МБ
• Максимальный ток на каждом
контакте составляет 12 мА, но
рекомендуется использовать 6 мА.
• Плата имеет 36 контактов
ввода/вывода общего назначения
• Встроенный модуль Wi-Fi стандарта 802.11
• Контакты ввода/вывода общего назначения имеют
функции PWM, I2C и SPI
• Доступна версия Bluetooth 4.2 и версия Bluetooth с
низким энергопотреблением (BLE).
• Рабочее напряжение от 2 до 3,6В
• 10-электродная емкостная сенсорная поддержка
• Встроенная антенна на печатной плате или разъем IPEX
для внешней антенны
• Диапазон рабочих температур от -40 ° C до + 125 ° C
364.
Датчики в ESP32• Датчик холла
• Кварцевый генератор частотой 32 кГц
• Аналоговый усилитель со сверхнизким уровнем
шума
• 10 емкостных сенсорных выводов
365.
Семейство микроконтроллеров ESP32До начала 2020г. все модули типа «ESP32»
создавались на базе трех чипов, отличающихся друг
от друга лишь количеством ядер процессора,
производительностью и максимальной тактовой
частотой:
• ESP32-D0WDQ6: 2 ядра / 600MIPS / 240МГц;
• ESP32-D0WD
2 ядра / 600MIPS / 240МГц;
• ESP32-S0WD
1 ядро / 200MIPS / 160МГц.
B январе 2020г. появились микроконтроллеры «ECO
V3», у которых были исправлены некоторые баги.
• ESP32-D0WDQ6-V3: 2 ядра / 600MIPS / 240МГц;
• ESP32-D0WD-V3
2 ядра / 600MIPS / 240МГц.
366.
Почему же именно он???• Многопоточная операционная система жесткого реального
времени позволяет легко наращивать функционал системы без
усложнения прошивки
• Возможность использования всех аппаратных возможностей
чипа
• Возможность конфигурирования ESP под свои нужды и задачи
• Возможность произвольного конфигурирования разделов
FLASH - памяти
• Использование циклов событий позволяет организовать
"правильное" взаимодействие между различными
функциональными модулями прошивки и избавиться от
многоярусных callback-ов.
• NVS-хранилище для хранения данных и параметров
367.
367368.
Контроллерные платыNodeMCU (ESP8266)
Плата, на которой установлен микроконтроллерный модуль ESP8266 с
процессором Tensilica Xtensa L106, работающим на частоте 80 МГц
(можно разогнать до 160 МГц). Плата имеет 4 мегабайта Flash-памяти.
Размер NodeMCU всего 6 х 3 см. NodeMCU умеет работать с локальной
сетью или с интернетом через Wi-Fi. Программы загружаются через
разъем Micro USB на плате. Наличие интерфейса UART-USB позволяет
легко подключить плату к компьютеру. NodeMCU может
программироваться на языке Си. Существует множество прошивок,
дающих возможность писать программы для ESP8266 на языках
высокого уровня: Lua, MicroPython, JavaScript, Basic, Лисп.
Кроме того, написаны специальные
прошивки для интернета вещей и
домашней автоматизации.
NodeMCU часто используется для
создания систем умного дома или роботов,
управляемых на расстоянии.
368
369.
Контроллерные платыArduino Uno R3
Плата из семейства Arduino, ориентированного на
непрофессиональных пользователей.
Программирование встроенного микроконтроллера
ATmega328 от Atmel производится на специальном
языке Arduino с помощью бесплатной среды
программирования Arduino IDE. Uno R3 имеет 32 КБ
памяти для программ, 2 КБ ОЗУ и 1 КБ
энергонезависимой памяти EEPROM. Программы для
Arduino называются скетчами. При загрузке скетча
используется Загрузчик Arduino — небольшая
программа, заранее загруженная в микроконтроллер
на плате. Запрограммировать Arduino Uno R3 можно
просто подключив плату к компьютеру обычным USBкабелем. Для китайских клонов Arduino необходимо
установить драйвер CH340.
369
370.
Контроллерные платыMSP430 LaunchPad
Плата от Texas Instruments для быстрого знакомства с
16-разрядными микроконтроллерами MSP430.
Поставляется с установленным микроконтроллером
MSP430G2553 (16 КБ Flash-памяти для программ,
512 Байт ОЗУ) и дополнительным MSP430G2452. Для
составления программ на языке Си можно
использовать бесплатную Code Composer Studio от
производителя платы. Кроме того, существует
бесплатная ардуиноподобная среда Energia.
370
371.
Контроллерные платыSTM8S-Discovery
Официальная отладочная плата от STMicroelectronics с
8-разрядным микроконтроллером STM8S105C6T6.
Имеет 32 КБ Flash-памяти для прогамм, 2 КБ
оперативной памяти, 1 КБ энергонезависимой памяти
EEPROM; пользовательский светодиод и сенсорные
кнопки, а также удобную макетную площадку для
монтажа дополнительных элементов схемы. В плату
интегрирован программатор/отладчик ST-Link,
позволяющий загружать программы в память
микроконтроллера, подключив плату к порту USB.
Программатор может быть легко отделен от платы, а
плата может использоваться в законченном
устройстве.
371
372.
Контроллерные платыSTM32VL-Discovery
Мощная отладочная плата от ST имеет на борту
программатор/отладчик ST-LINK и производительный
32-разрядный ARM-микроконтроллер STM32F100RBT
со 128 КБ Flash-памяти и 8 КБ ОЗУ. На плате
присутствуют два пользовательских светодиода и
кнопка. Часто рекомендуется в качестве начального
средства для знакомства с ARM-микроконтроллерами
на ядре Cortex-M3.
372
373.
Отладочная плата STM32VLDiscovery373
374.
Отладочная плата STM32-Discovery374
375.
Отладочная плата STM32-Discovery375