
 Информатика
Информатика Электроника
ЭлектроникаПохожие презентации:










ИT-марафон 2023-2024. Трек: «Робототехника». Отборочный этап №3 «Работа с ИК-приёмником. Дистанционное управление роботом»
1.
ИT-марафон 2023-2024Трек: «Робототехника»
Отборочный этап № 3
«Работа с ИК-приёмником.
Дистанционное управление роботом»
2.
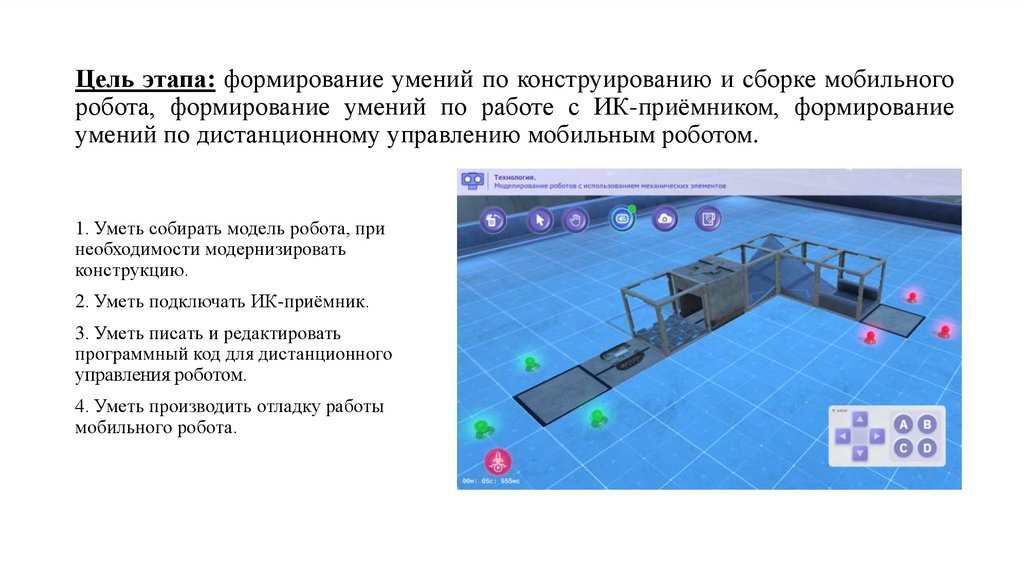
Цель этапа: формирование умений по конструированию и сборке мобильногоробота, формирование умений по работе с ИК-приёмником, формирование
умений по дистанционному управлению мобильным роботом.
1. Уметь собирать модель робота, при
необходимости модернизировать
конструкцию.
2. Уметь подключать ИК-приёмник.
3. Уметь писать и редактировать
программный код для дистанционного
управления роботом.
4. Уметь производить отладку работы
мобильного робота.
3.
СТРУКТУРА ЭТАПА1. Демонстрация виртуальной лаборатории МЭШ по робототехнике.
2. Тренировочное задание по работе с ИК-приёмником (подключение,
считывание сигналов, написание программы для дистанционного управления).
3. Тренировочное задание по управлению роботом на разных поверхностях с
использованием различных движителей.
4. Самостоятельное выполнение участниками задания этапа.
4.
Пример подключения ИК-приёмника ипример программного кода для работы с ним
#include <IRremote.h> // подключаем библиотеку для работы с ИК-приёмником
const byte IR_RECEIVE_PIN = 8; // указываем пин, к которому подключен ИК-приёмник
void setup()
{
Serial.begin(9600);
IrReceiver.begin(IR_RECEIVE_PIN, ENABLE_LED_FEEDBACK);
}
void loop()
{
if (IrReceiver.decode())
// если данные пришли, то выполняем команды
{
Serial.println(IrReceiver.decodedIRData.decodedRawData);
// в монитор порта выводится код нажатой кнопки в десятичном формате
IrReceiver.resume();
}
}