





 Электроника
ЭлектроникаПохожие презентации:










Шагающие механизмы
1.
Презентация на тему«Шагающие механизмы»
Выполнена педагогом
дополнительного образования
Абрамкиной К.В.
2.
Цель занятия:-Развитие критического мышления и
творческих способностей
-ознакомление с темой шагающих
механизмов
3.
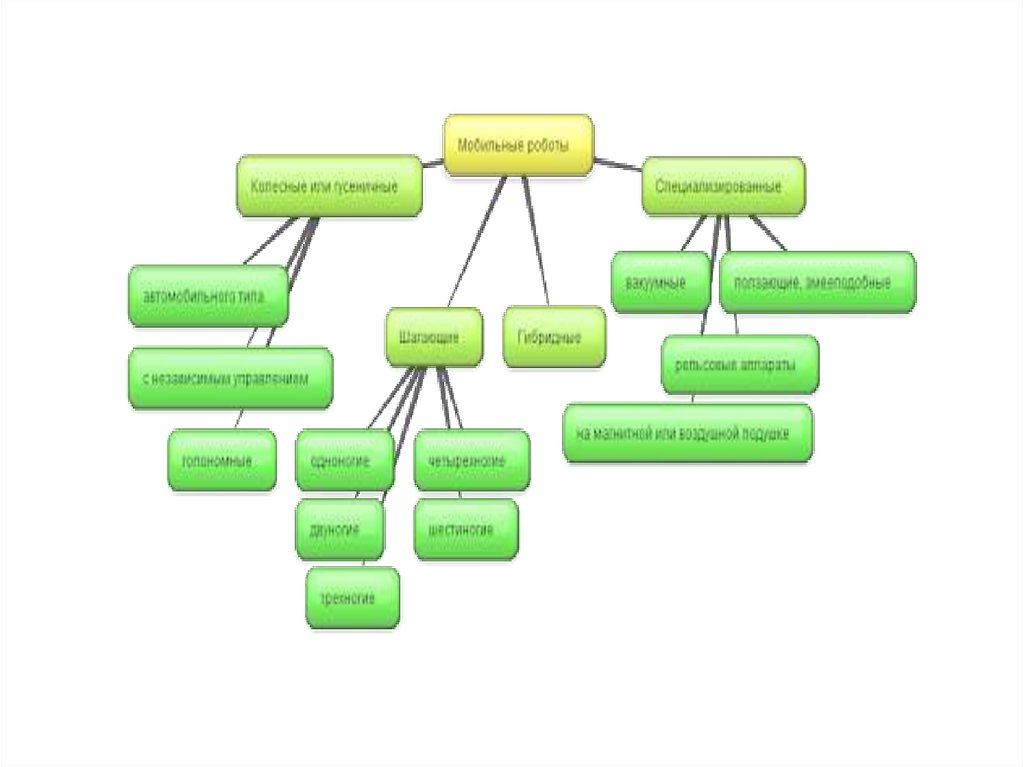
Классы роботов:• Манипуляционные, которые в свою
очередь делятся на стационарные и
передвижные.
• Мобильные, которые в свою очередь
делятся на колесные, шагающие,
гусеничные.
4.
Шагающие роботы5.
6.
Компоненты роботаИз каких деталей состоят шагающие
роботы?
7.
Практическая работа №1Задачи:
• робот должен стоять на поверхности
(полигоне), упираясь только на «ноги»;
«ноги» робота приводятся в
движение одним мотором;
движение «ног» должно быть
возвратно-поступательным;
центр тяжести робота должен
быть смещен вперед по ходу движения
• Сделать программу для теста
8.
Задание №2• собрать робота, который максимально
быстро сможет пройти расстояние в 30
см. В ходе задания команды должны
провести не меньше 3-х экспериментов,
меняя физические характеристики
педипуляторов, чтобы определить при
каких соотношениях размеров частей
педипуляторов, робот движется
максимально быстро.
9.
Задание №2• Заполнить таблицу
• Где части педипулятора обозначены
следующим образом.
10.
Конечный результат задания№2
11.
Ответы на вопросы• Какое должно было быть расположение
педипуляторов друг относительно друга до запуска
программы, чтобы робот шагал максимально плавно?
• На каких экспериментах приходилось переделывать
помимо педипулятора опорную часть робота, чтобы
еще больше повысить его скорость?
• На каких экспериментах приходилось переделывать
помимо педипулятора опорную часть робота, чтобы
он продолжал сохранять устойчивость?
12.
Дополнительное задание: Шагающийробот на 3 ножках (Tripod)
13.
Анализ урокасегодня я узнал…
было интересно…
было трудно…
я понял, что…
теперь я могу…
я научился…
я смог…
я попробую…
меня удивило…