





 География
ГеографияПохожие презентации:










Радионавигационные системы и комплексы
1.
2.
guap.ruРАДИОНАВИГАЦИОННЫЕ
СИСТЕМЫ И КОМПЛЕКСЫ
ЛЕКЦИЯ 2
Санкт-Петербург
2024
3.
РНСИ КОМПЛЕКСЫguap.ru
ЛЕКЦИЯ 2
3
Тема : Системы координат и методы определения
местоположения в РНС
1.Системы координат бортовых и наземных РНС.
2. Однопозиционный метод определения МП
3. Многопозиционные
методы
определения
местоположения объектов
4. Определение линий и поверхностей положения.
5. Виды многопозиционных РНС.
6. Задание на самостоятельную работу
4.
1. Термины и определения. Классификация РНСпосадки
Термины и определения
4
3 Сосновский А.А. , Хаймович И.А..
Авиационная радионавигация. Справочник М.: Транспорт, 1990 г.
– Для инженерно-технического состава,
связанного с эксплуатацией
радионавигационных средств обеспечения
полетов.
Изучив
теоретический
материал,
представленный на стр. 5 – 14 дайте
понятие
терминам
и
определениям,
используемым в теории и практике РНС.
5.
Системы координат бортовых и наземных РНС5
Местоположение объекта навигации (цели) характеризуется
положением центра масс этого объекта (цели) в некоторой опорной
системе координат. Выбор опорной системы координат зависит от типа
используемой РЛС или РНС. Поэтому, прежде чем рассмотреть сущность
методов определения местоположения, рассмотрим системы координат
(СК) используемые в РЛС и РНС.
В средствах радиолокационной разведки используют:
криволинейные СК ( в частности сферические);
прямоугольные СК.
Криволинейные координаты точки представляют собой
упорядоченную тройку чисел (Д, , .) , однозначно определяющих ее
положение в пространстве .
В сферической системе координат эту тройку образуют Д, , .
Из прямоугольных систем координат находят применение
нормальная земная и нормальная системы (X,Y,Z). Обе системы
правые.
6.
Сферические СКa)
6
б).
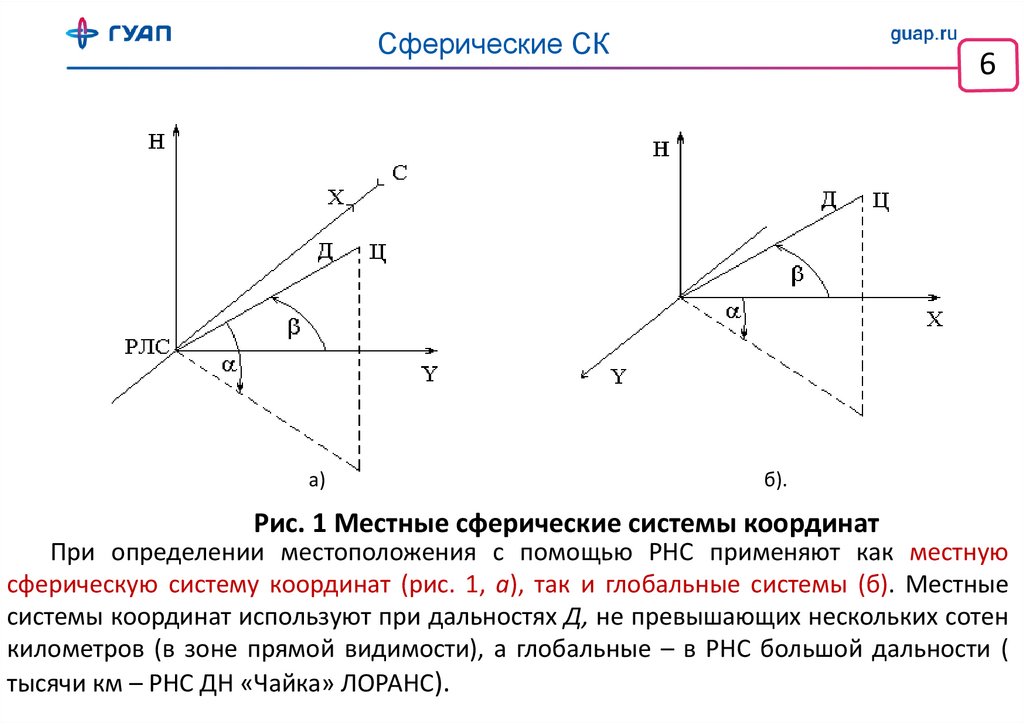
Рис. 1 Местные сферические системы координат
При определении местоположения с помощью РНС применяют как местную
сферическую систему координат (рис. 1, а), так и глобальные системы (б). Местные
системы координат используют при дальностях Д, не превышающих нескольких сотен
километров (в зоне прямой видимости), а глобальные – в РНС большой дальности (
тысячи км – РНС ДН «Чайка» ЛОРАНС).
7.
Глобальные СК7
Глобальные системы координат жестко связаны с Землей и применяются для
навигации, охватывающей всю земную поверхность или значительную ее часть. Наиболее
распространенными глобальными системами координат являются: географическая (или
геодезическая), геоцентрическая, а также левая и правая ортодромические системы
координат.
В системе координат в качестве основы используется земной
геоид и за
основную плоскость отсчета принята плоскость экватора. Под поверхностью геоида
понимается поверхность потенциала силы тяжести, совпадающая с поверхностью
мирового океана в спокойном состоянии. В каждой точке поверхность геоида нормальна к
направлению силы тяжести. Положение точек на поверхности геоида определяется
астрономическими широтой и долготой. Поверхность геоида, используемая для
астрономических измерений, непригодна для решения задач навигации, так как
применительно к поверхности геоида не существует аналитических зависимостей
для вычисления расстояния между двумя точками.
Поэтому в качестве дальнейшего упрощения действительной формы Земли принимают
эллипсоид вращения. Для наилучшего приближения эллипсоида к действительной фигуре
Земли в нашей стране принят эллипсоид. Большая и малая полуоси эллипсоида (см. рис. 1.
слайда 8) соответственно равны: а = 6378245 м и b = 6356863 м.
8.
Глобальные СКа
8
б
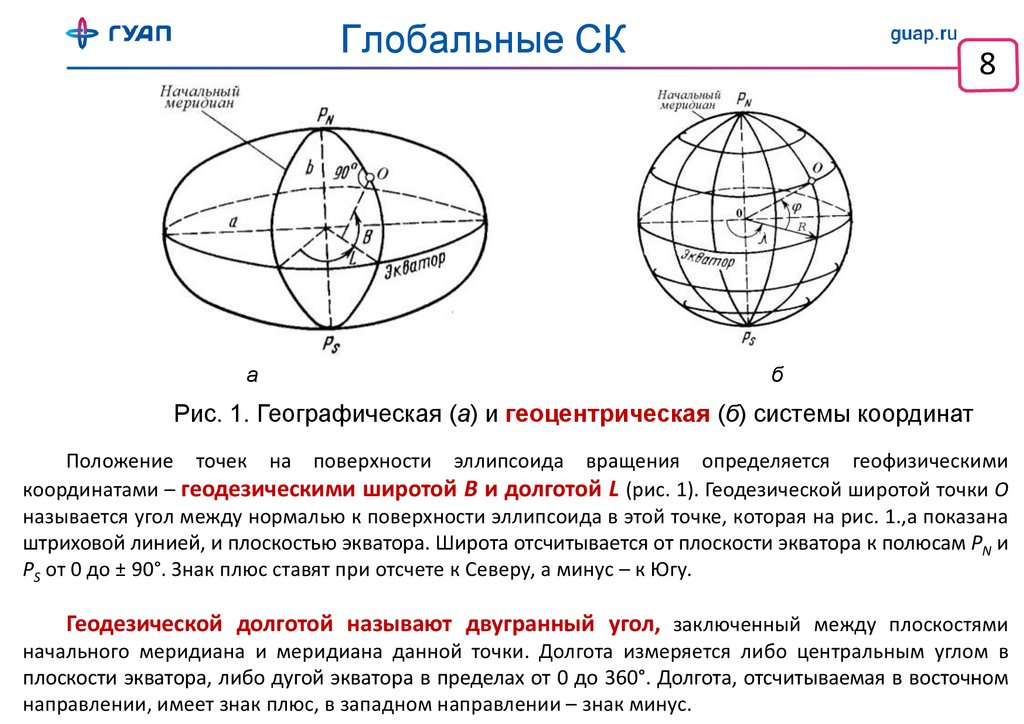
Рис. 1. Географическая (а) и геоцентрическая (б) системы координат
Положение точек на поверхности эллипсоида вращения определяется геофизическими
координатами – геодезическими широтой В и долготой L (рис. 1). Геодезической широтой точки О
называется угол между нормалью к поверхности эллипсоида в этой точке, которая на рис. 1.,а показана
штриховой линией, и плоскостью экватора. Широта отсчитывается от плоскости экватора к полюсам PN и
PS от 0 до ± 90°. Знак плюс ставят при отсчете к Северу, а минус – к Югу.
Геодезической долготой называют двугранный угол, заключенный между плоскостями
начального меридиана и меридиана данной точки. Долгота измеряется либо центральным углом в
плоскости экватора, либо дугой экватора в пределах от 0 до 360°. Долгота, отсчитываемая в восточном
направлении, имеет знак плюс, в западном направлении – знак минус.
9.
9Поверхность эллипсоида вращения имеет строгое математическое описание и
позволяет вывести формулы, необходимые для решения задач навигации. Однако
основные аналитические зависимости при этом оказываются сложными и практически
могут быть реализованы только с использованием бортовых цифровых вычислительных
машин (ЦВМ).
При использовании геоцентрической (сферической) системы координат Земля
принимается за шар, радиус которого равен R = 6371110 м. Геоцентрическая
система координат отличается от геодезической способом отсчета широты. Отсчет
геоцентрической широты производится между плоскостью экватора и направлением
радиус-вектора (рис. 1.8,б). Способ отсчета геоцентрической долготы совпадает со
способом отсчета географической долготы. Формулы для решения задач навигации на
сфере хотя и проще, чем на поверхности эллипсоида, но все же требуют применения
достаточно объемных программ при использовании ЦВМ
Примечание: Для решения задач навигации в сравнительно узкой полосе относительно экватора
формулы могут быть значительно упрощены за счет замены тригонометрических функций их
аргументами. Например, при допустимых относительных погрешностях не более 0,2…1% в полосе
земной поверхности ± (400…900) км от экватора в ряде случаев можно применять следующие
упрощения: sin = , cos = 1. Желание решать навигационные задачи по упрощенным
алгоритмам в районах Земли, удаленных от экватора, привело к широкому использованию
произвольных сферических координат, называемых ортодромическими.
10.
2. Многопозиционные методы определенияместоположения объектов
К МНОГОПОЗИЦИОННЫМ (позиционным)
методам определения местоположения объектов
относятся:
1. дальномерный,
2. пеленгационный (угломерный),
3. разностно-дальномерный,
10
квазидальномерный.
Однопозиционным методом считают
дальномерно-пеленгационный
(дальномерно-угломерный)
Методы
определения
местоположения,
основаны на использовании поверхностей или
линий положения (рис1).
Рис 1
Поверхность положения представляет собой геометрическое
место точек в пространстве, соответствующих одному значению
навигационного параметра W, т.е. одному значению дальности, угла и т.п.
Местоположение объекта в пространстве находится как точка пересечения
трех поверхностей положения (ПП) Например При дальномерном методе
пересечение трех ПП (сфер) в спутниковых РНС
11.
3. Определение линий и поверхностей положения11
Пересечение
двух
поверхностей
положения,
соответствующих,
например,
навигационным элементам измерямых дальностей W1 и W3, дает
линию положения (ЛП), которая является геометрическим местом точек с
одинаковыми значениями элементов W1 и W3. Если один из этих элементов
измеряется независимым устройством, то для определения координат объекта в
плоскости ПП1 (Н=const) достаточно двух линий положения, а следовательно, двух
устройств, определяющих элементы W1 и W2.
В позиционных РНС измеряют элементы W, характеризующие
положение объектов относительно стационарных или подвижных опорных
передающих или приемопередающих радиостанций, расположенных в
пунктах с известными координатами – радионавигационных точках (РНТ).
Большинство РНС реализуют позиционные методы, что объясняется
возможностью определения местоположения без учета и знания
пройденного пути. Однако это возможно только в зоне действия опорных
станций. Кроме того, на точность позиционных РНС сильно влияют помехи,
отраженные сигналы и т.п.
12.
4. Виды многопозиционных РНС12
По структурным особенностям РНС различают :
а) маячные многопозиционные неавтономные РНС (дальномерные, пеленгационнодальномерные,
пеленгационные,
разностно-дальномерные,
квазидальномерные),
основанные на создании специализированных источников излучения (маяков) вне
объектов навигации и приеме их излучений на этих объектах;
б) пеленгаторные РНС (неавтономные и автономные), обеспечивающие получение
позиционной информации объектами навигации за счет направленного приема;
в) РНС с использованием локационной информации, являющиеся обычно системами
объединения позиционной и непозиционной информации
Дальномерные РНС основаны на измерениях дальности и используют активный
запрос и ответ. Совокупность запросчиков на объектах (передатчики, приемники) и
ответчика на маяке (приемник, передатчик) образует систему активного запроса и
ответа (САЗО). При этом в данных системах большое число запросчиков обслуживается
одним ответчиком с практически всенаправленной антенной.
Точному значению измеряемого (навигационного) параметра – дальности
соответствует геометрическое место точек: линия положения объекта в виде
окружности на плоскости ( слайд 13 рис.1. а) и его поверхность положения в виде сферы
в пространстве.
13.
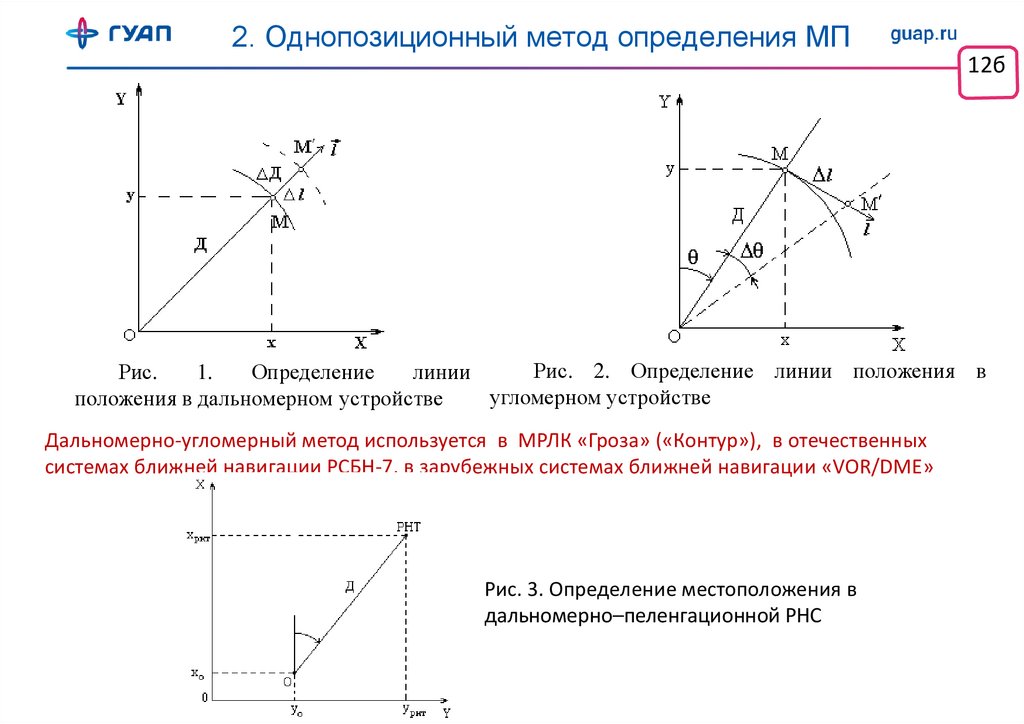
2. Однопозиционный метод определения МП12б
Рис. 2. Определение линии положения в
Рис.
1.
Определение
линии
угломерном устройстве
положения в дальномерном устройстве
Дальномерно-угломерный метод используется в МРЛК «Гроза» («Контур»), в отечественных
системах ближней навигации РСБН-7, в зарубежных системах ближней навигации «VOR/DМЕ»
Рис. 3. Определение местоположения в
дальномерно–пеленгационной РНС
14.
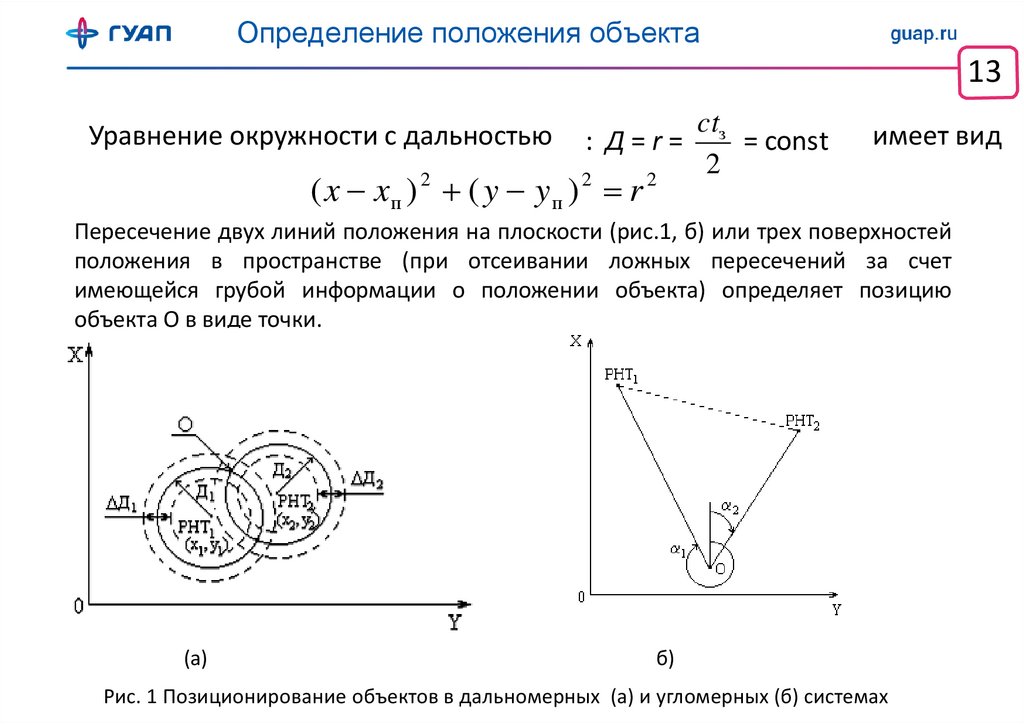
Определение положения объекта13
Уравнение окружности с дальностью
ctз
: Д=r=
= const
2
2
2
имеет вид
( x xп ) 2 ( y y п ) r
Пересечение двух линий положения на плоскости (рис.1, б) или трех поверхностей
положения в пространстве (при отсеивании ложных пересечений за счет
имеющейся грубой информации о положении объекта) определяет позицию
объекта О в виде точки.
(а)
б)
Рис. 1 Позиционирование объектов в дальномерных (а) и угломерных (б) системах
15.
14Пеленгационные РНС включают однопозиционные маяки с изменением кода
сигналов в зависимости от направления излучения. Позиция объекта навигации на
плоскости находится в результате приема излучений двух таких маяков (рис.1.б
слайда 14). Передающей аппаратуры на объектах навигации не требуется, что
является достоинством чисто угломерных измерений.
а)
По
пеленгам,
например
связной
излучающей
аппаратуры
объекта
из
нескольких пунктов приема
комплексов РТ разведки
(рис.1. а) , определяется
положение этого объекта,
причем без установки на нем
специализированной
навигационной аппаратуры.
б)
Беззапросный вариант обеспечивается установкой
на
объекте
навигации
пеленгатора
—
Рис.
1.
Определение
местоположения
угломерными РНС в запросных (а) и
беззапросных угломерных (б) типа АРК-15 РНС
автоматического радиокомпаса РК АРК-15.
Положение объекта (рис.1. б) находится по
пеленгам наземных излучающих радиосредств PC с
известными координатами.
16.
1. Термины и определения.Задание
15
3 Сосновский А.А. , Хаймович И.А..
Авиационная радионавигация. Справочник М.: Транспорт, 1990 г.
– Для инженерно-технического состава,
связанного с эксплуатацией
радионавигационных средств обеспечения
полетов.
Изучив
теоретический
материал,
представленный на стр. 5 – 10.
законспектировать
термины
и
определения
РНС
линий и
поверхностей положения,
систем
координат
17.
guap.ruСпасибо за внимание!