























 Математика
МатематикаПохожие презентации:





")




Методы моделирования и оптимизации. Этапы построения моделей
1.
МЕТОДЫ МОДЕЛИРОВАНИЯИ ОПТИМИЗАЦИИ
Леонид Фёдорович Ямщиков
профессор, доктор химических наук.
Кафедра редких металлов и наноматериалов
2.
Лекция 11 Введение.
2 Этапы построения моделей.
3 Место дисциплины среди отраслей
знания.
4 Системнй подход и системный
анализ при исследовании сложных
объектов.
3.
ОПРЕДЕЛЕНИЯМодель (modulus – аналог, образец)
- условный образ объекта исследования,
отображающий наиболее существенные его
характеристики.
Моделирование - метод исследования
процессов или явлений на их моделях
(математических или физических) или реальных
установках.
4.
Математическая модель система математических выражений,описывающих характеристики
объекта моделирования.
5.
Optimum (лат.) – наилучшее илисовокупность наиболее благоприятных
условий или результатов.
Оптимизация – целенаправленная
деятельность, нацеленная на получение
наилучших результатов при
соответствующих условиях
и ограничениях.
6.
Объект моделирования –это изделие, аппарат,
процесс, деятельность.
7.
Основные этапы моделирования:• Постановка цели и определение задач.
• Построение (синтез) модели.
• Идентификация модели (внесение
корректив в модель).
• Проверка адекватности модели.
• Изучение свойств объекта по модели.
8.
Три условия корректной постановкизадачи оптимизации:
• Оптимизация только одной величины!
• Наличие степеней свободы объекта
(ресурсы, управляющие воздействия).
• Количественная оценка критерия
оптимальности - R (целевая функция,
функция качества, экономический
критерий).
9.
Требования к критерию оптимизации:1 Выражение одним числом
R ≡ А:В = 3:2.
2 Однозначность.
3 Универсальность.
4 Желательно, чтобы R имел
физический смысл, был простым
и легко вычисляемым.
10.
Место дисциплины среди отраслейзнания:
Моделирование и
оптимизация относятся
к науке кибернетике.
11.
Необходимые и достаточные условия дляопределения науки, к которой относится
моделирование:
• Предмет исследований – системы
любой природы и их управляемость.
• Метод исследований – математическое
моделирование; стратегия
исследований – системный анализ.
• Средство исследований – ЭВМ.
12.
Кибернетика – наука, изучающаясистемы любой природы, которые
способны воспринимать, хранить и
перерабатывать информацию для
целей оптимального управления
системами.
13.
Методы кибернетики позволяют:• Создавать оптимально
функционирующий процесс
(систему).
• Указывать пути выбора
и использования оптимального
режима, а также оптимального
управления процессом.
14.
КАФАРОВ ВИКТОР ВЯЧЕСЛАВОВИЧоснователь школы химической кибернетики в
России
15.
Системный подходSystёma (греч.) – целое,
составленное из частей;
множество элементов,
находящихся в отношениях и
связях друг с другом,
образующих определенную
целостность, единство.
16.
Система это достаточно сложныйобъект, который может быть
расчленен на составные
элементы (подсистемы).
Элементы информационно
связаны между собой и
окружающей средой.
17.
Признаки систем:• Целостность и делимость.
• Наличие устойчивых связей.
• Организация.
• Эмерджентность.
Вывод: С. – не простая совокупность
элементов; изучая каждую подсистему
в отдельности, нельзя познать все
свойства системы в целом.
18.
Принцип декомпозиции системы1.1
1.3
1.2
1.4
1
Информационные связи между элементами
образуют структуру системы. Элементы
системы ≡ подсистемы или «черные ящики».
19.
Правила декомпозиции системы:• каждая подсистема должна реализовывать
единственную функцию системы;
• выделенная в подсистему функция должна
быть легко понимаема независимо от
сложности ее реализации;
• связь между подсистемами должна
вводиться только при наличии связи между
соответствующими функциями системы;
• связи между подсистемами должны быть
простыми (насколько это возможно).
20.
Число уровней системы, числоподсистем каждого уровня может
быть различным.
Подсистемы, непосредственно
входящие в одну систему более
высокого уровня, действуя
совместно, должны выполнять все
функции той системы, в которую они
входят.
21.
Принцип синтеза системы1.1
1.3
1.2
1.4
1
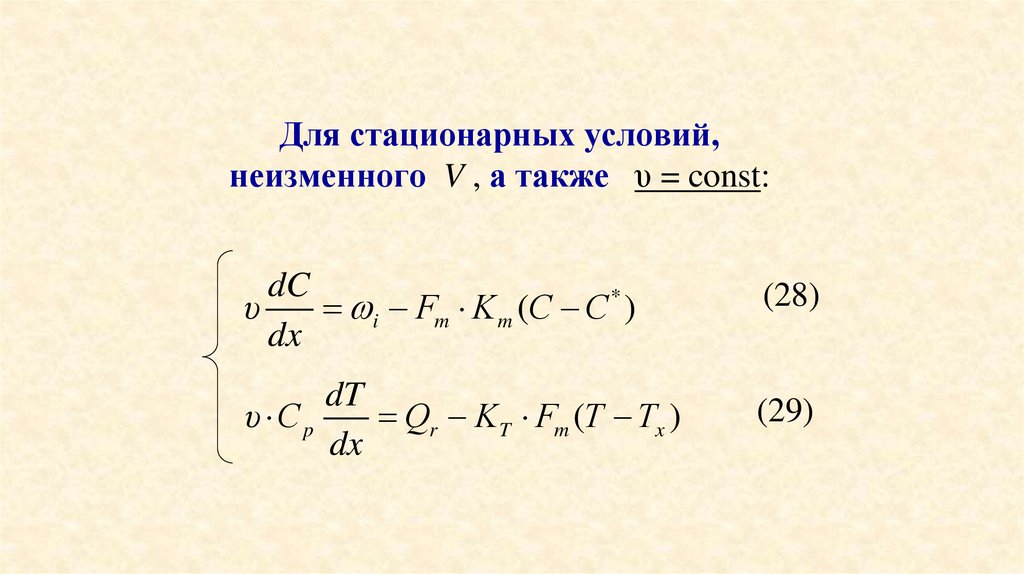
выявить связи между подсистемами
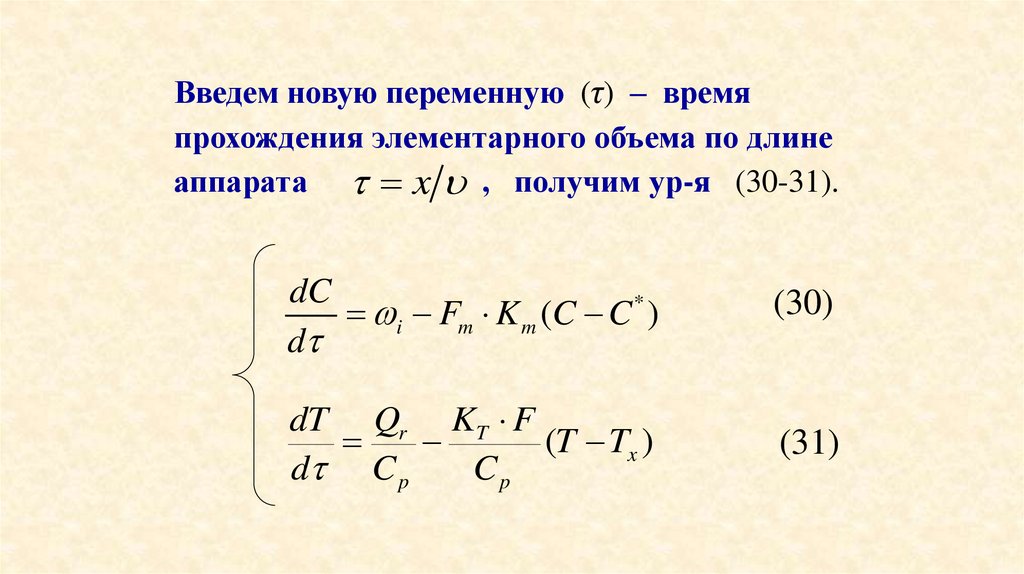
помогает системный анализ
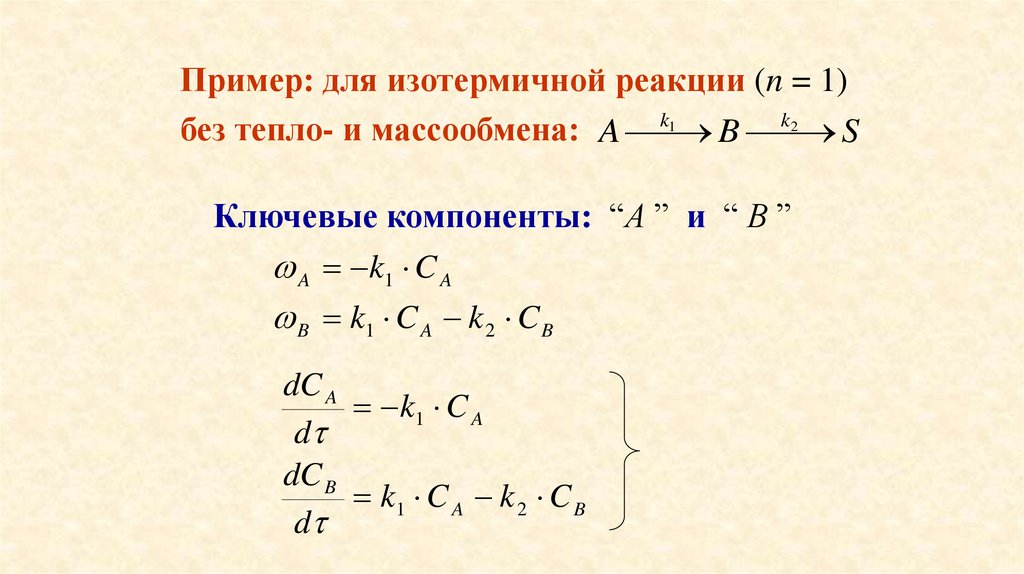
22.
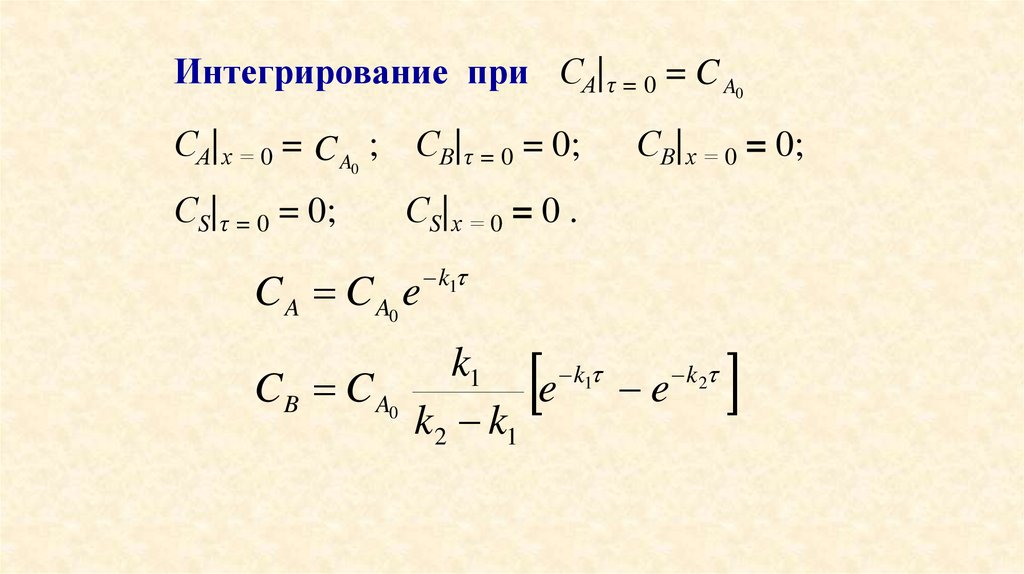
Понятие система дает возможность:• математической формализации
изучаемых объектов;
• проникновения в их физическую
сущность;
• получения широких обобщений и
количественных закономерностей.
23.
АКСИОМА:Всякая система – имеет
алгоритм функционирования,
направленный на достижение
определенной цели !
24.
Системный подход (СП) –методологическое направление научного
познания, в основе которого лежит
рассмотрение объектов как систем.
СП ориентирует на раскрытие
целостности объекта, на выявление
связей и сведение их в единую
теоретическую картину.
25.
Системный анализ (СА) – совокупностьметодологических средств,
используемых для подготовки и
обоснования решений по сложным
проблемам.
Опирается на СП, а также на ряд
математических дисциплин. Основная
процедура - построение обобщенной
модели реального объекта.
26.
Общие положения стратегии системногоанализа
1 Четкая формулировка цели
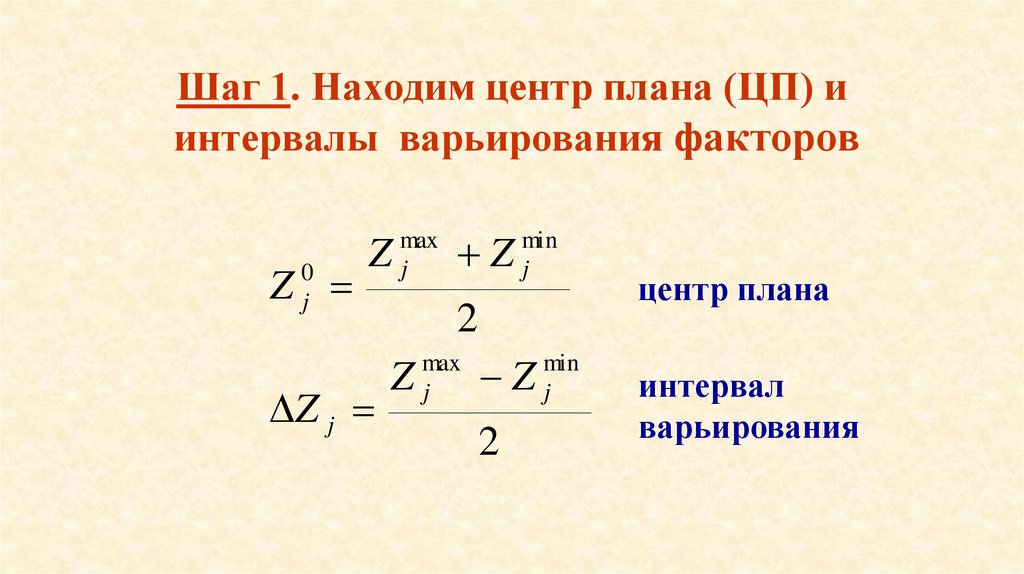
исследования.
2 Постановка задач по реализации цели и
определение критерия эффективности
решения задачи.
3 Разработка развернутого плана
исследований с указанием основных
этапов и направлений решения задач.
27.
4 Пропорционально-последовательноепродвижение по всему комплексу
взаимосвязанных этапов и направлений.
5 Организация последовательных
приближений и повторных исследований
на отдельных этапах.
6 Принцип нисходящей иерархии анализа
и восходящей иерархии синтеза в
решении составных частных задач.
28.
Резюме - суть СА заключается:1 В замене реального объекта понятием
системы.
2 В декомпозиции системы на простые
подсистемы, которые могут
существовать только в составе самой
системы.
3 В достаточно простом математическом
описании (формализации) поведения
подсистем с учетом связей с другими
подсистемами.
4 В синтезе математической модели
системы.
29.
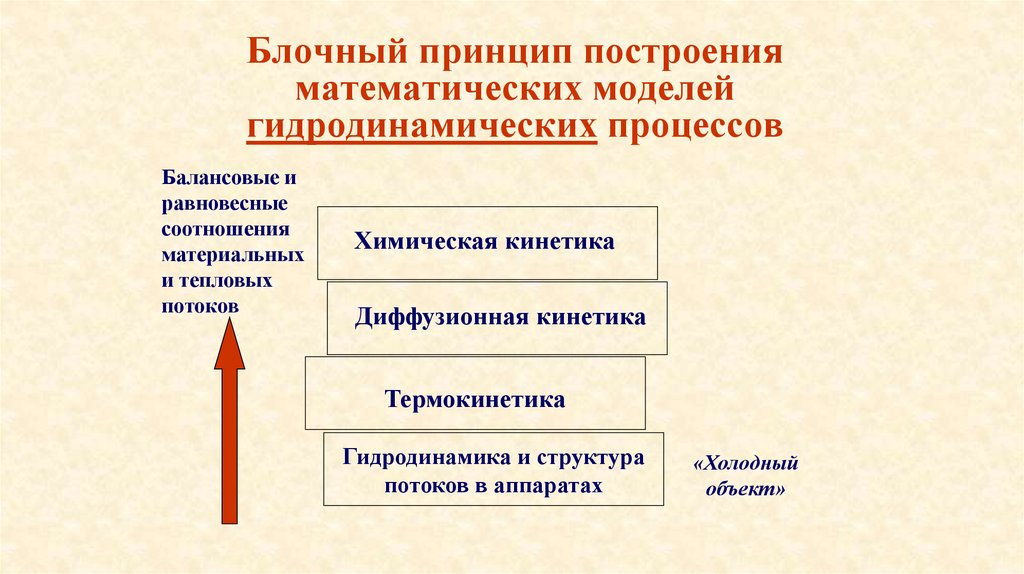
Блочный принцип построенияматематических моделей
гидродинамических процессов
Балансовые и
равновесные
соотношения
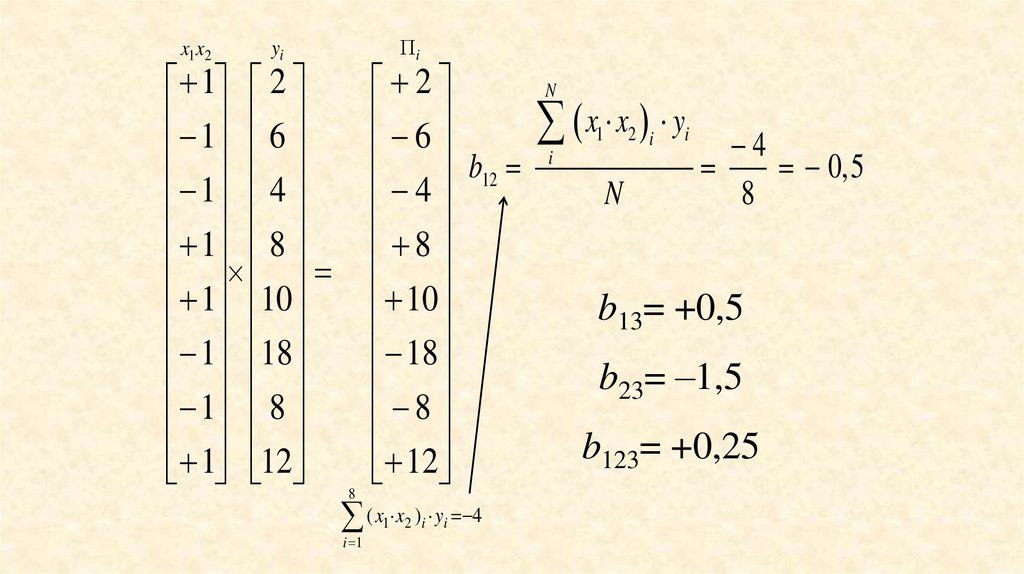
материальных
и тепловых
потоков
Химическая кинетика
Диффузионная кинетика
Термокинетика
Гидродинамика и структура
потоков в аппаратах
«Холодный
объект»
30.
Каждый типовой процесс,составляющий отдельную
единицу (аппарат)
химического производства,
формализуем как физикохимическую систему (ФХС).
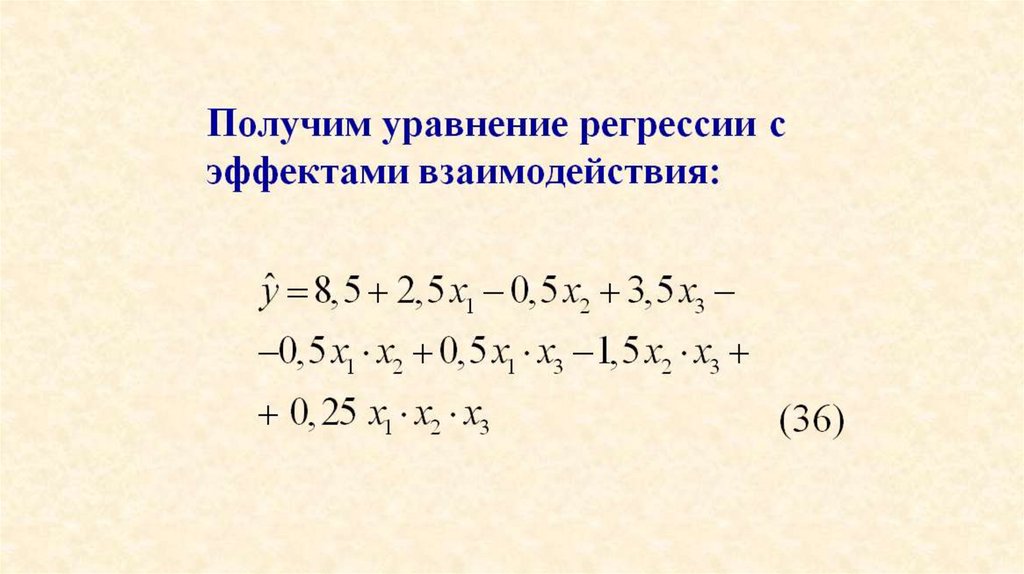
31.
ФХС – многофазнаямногокомпонентная среда,
распределенная в пространстве и
переменная во времени, в каждой
точке гомогенности которой и на
границе раздела фаз происходит
перенос вещества, энергии или
импульса при наличии источников
и/или стоков последних.
32.
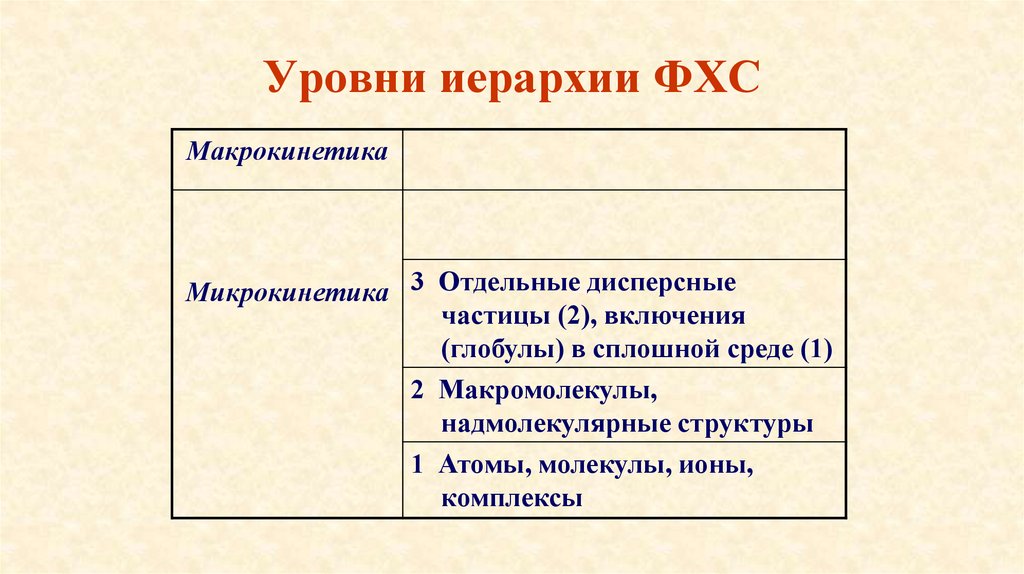
Уровни иерархии ФХСМакрокинетика
Микрокинетика
33.
Уровни иерархии ФХСМакрокинетика
Микрокинетика
1 Атомы, молекулы, ионы,
комплексы
34.
Уровни иерархии ФХСМакрокинетика
Микрокинетика
2 Макромолекулы,
надмолекулярные структуры
1 Атомы, молекулы, ионы,
комплексы
35.
Уровни иерархии ФХСМакрокинетика
Микрокинетика 3 Отдельные дисперсные
частицы (2), включения
(глобулы) в сплошной среде (1)
2 Макромолекулы,
надмолекулярные структуры
1 Атомы, молекулы, ионы,
комплексы
36.
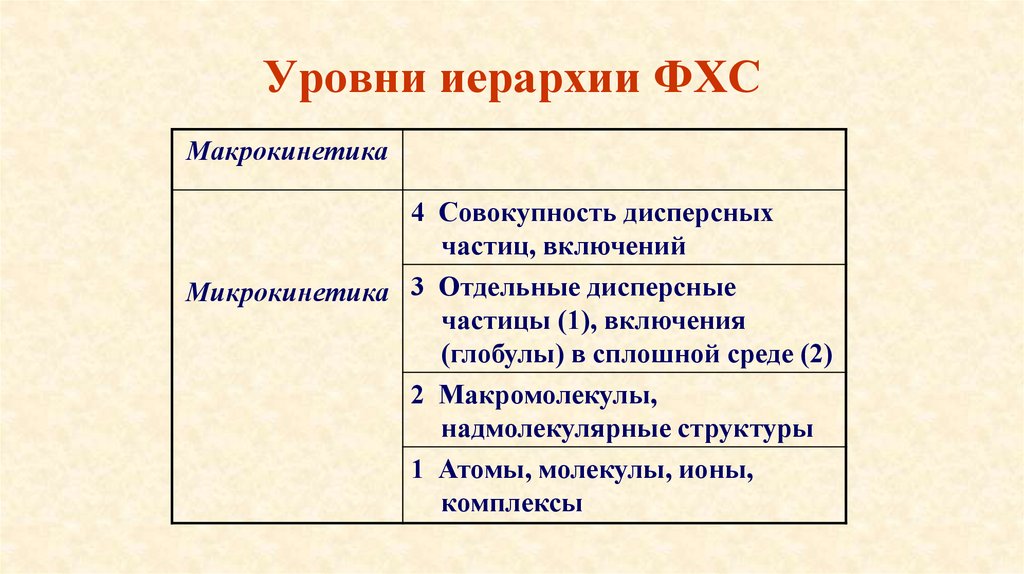
Уровни иерархии ФХСМакрокинетика
4 Совокупность дисперсных
частиц, включений
Микрокинетика 3 Отдельные дисперсные
частицы (1), включения
(глобулы) в сплошной среде (2)
2 Макромолекулы,
надмолекулярные структуры
1 Атомы, молекулы, ионы,
комплексы
37.
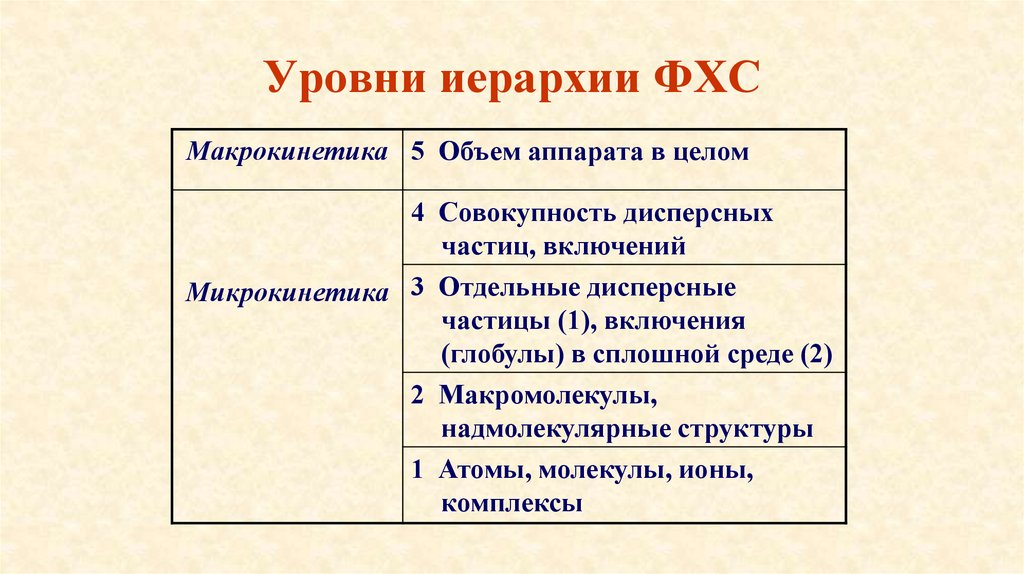
Уровни иерархии ФХСМакрокинетика 5 Объем аппарата в целом
4 Совокупность дисперсных
частиц, включений
Микрокинетика 3 Отдельные дисперсные
частицы (1), включения
(глобулы) в сплошной среде (2)
2 Макромолекулы,
надмолекулярные структуры
1 Атомы, молекулы, ионы,
комплексы
38.
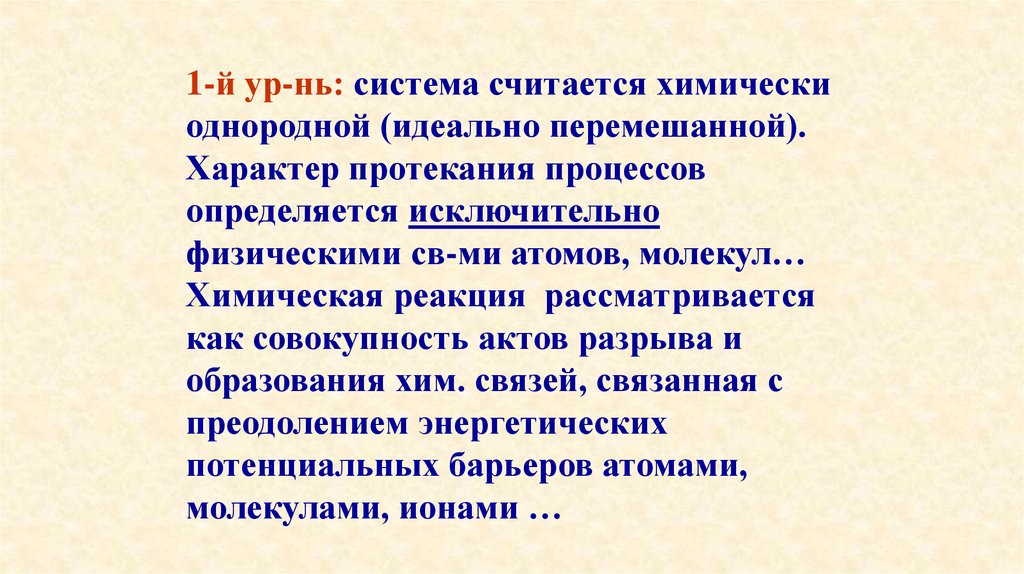
1-й ур-нь: система считается химическиоднородной (идеально перемешанной).
Характер протекания процессов
определяется исключительно
физическими св-ми атомов, молекул…
Химическая реакция рассматривается
как совокупность актов разрыва и
образования хим. связей, связанная с
преодолением энергетических
потенциальных барьеров атомами,
молекулами, ионами …
39.
2-й ур-нь: характеризуетсясовокупностью ф.-х. эффектов на
уровне надмолекулярных структур
(коллективы, ансамбли, агрегаты),
обладающих относительной
термодинамической
стабильностью при воздействии
гидромеханических возмущений.
Процессы определяются степенью
сегрегации подсистемы.
40.
3-й ур-нь: появляется элемент дисперснойфазы (2), которая есть элементарная ФХС,
движущаяся в объеме сплошной
среды (1). Химическая реакция протекает
как в объеме глобулы и сплошной среды,
так и на границе капли, на которую
действуют силы Архимеда, инерции,
сопротивления. Одновременно на глобулу
действуют механизмы переноса
субстанции. Причина - неравновесность
C , T , гетерогенной системы.
41.
4-й ур-нь: появляется множествоэлементов дисперсной фазы (2), которые
при движении в сплошной среде (1),
оставляют турбулентные следы. Вихри
следов накладываются. Это приводит к
турбулизации всей среды. Скорости
процессов переноса массы, энергии,
импульса увеличиваются. Эти явления
характеризуют гидродинамическую
обстановку в локальном объеме
аппарата.
42.
5-й ур-нь: характеризуетгидродинамическую структуру
потоков в аппарате в целом,
а не в локальном объеме.
Определяющими элементами
является конструкция аппарата
(расположение патрубков, наличие
мешалок, диффузоров,
отражательных перегородок и т.д.)
43.
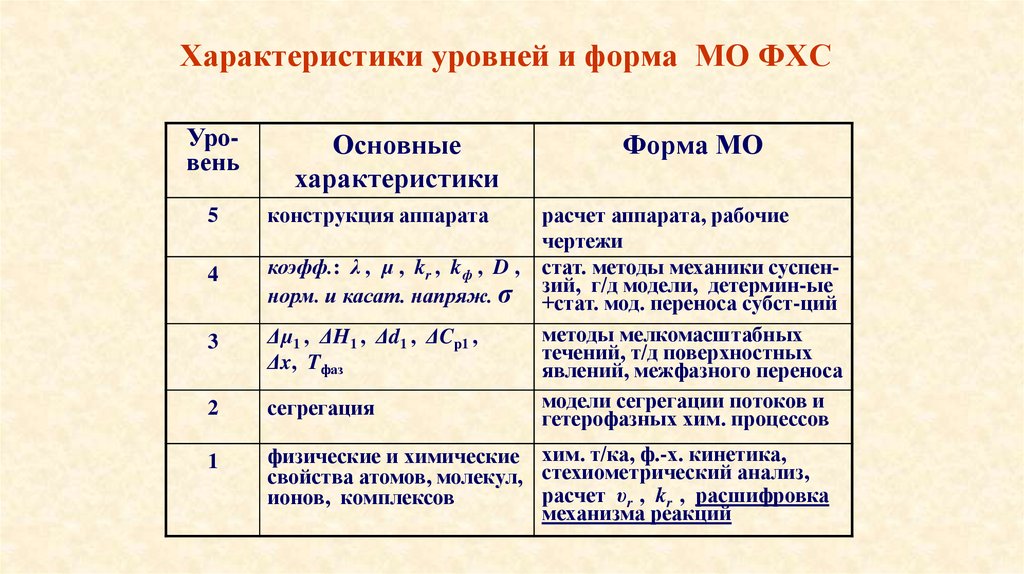
Характеристики уровней и форма МО ФХСУровень
Основные
характеристики
5
конструкция аппарата
4
коэфф.: λ , µ , kr , kф , D ,
норм. и касат. напряж. σ
3
Δµ1 , ΔH1 , Δd1 , ΔCp1 ,
Δx, Tфаз
2
сегрегация
1
Форма МО
расчет аппарата, рабочие
чертежи
стат. методы механики суспензий, г/д модели, детермин-ые
+стат. мод. переноса субст-ций
методы мелкомасштабных
течений, т/д поверхностных
явлений, межфазного переноса
модели сегрегации потоков и
гетерофазных хим. процессов
физические и химические хим. т/ка, ф.-х. кинетика,
свойства атомов, молекул, стехиометрический анализ,
расчет υr , kr , расшифровка
ионов, комплексов
механизма реакций
44.
ИЕРАРХИЧЕСКАЯСТРУКТУРА
ХТС
45.
ПОСЛЕДОВАТЕЛЬНОСТЬОПЕРАЦИЙ ХИМПРОИЗВОДСТВА:
• подготовка сырья;
• собственно химическое
превращение;
• выделение целевых продуктов.
46.
ХТС – целенаправленнаясовокупность процессов, аппаратов
и машин химической технологии,
обеспечивающих переработку
сырья в продукты потребления и
промпродукты путем проведения
технологических операций.
ХТС ≡ {блоки, узлы,
производства, предприятия}.
47.
СА позволяет любое химическоепроизводство, любую
технологическую цепочку
расчленить на определенное число
типовых технологических звеньев,
соответствующих типовым
химическим процессам:
химическое превращение, сорбция,
ректификация, выщелачивание,
фильтрация, осаждение и т.д.
48.
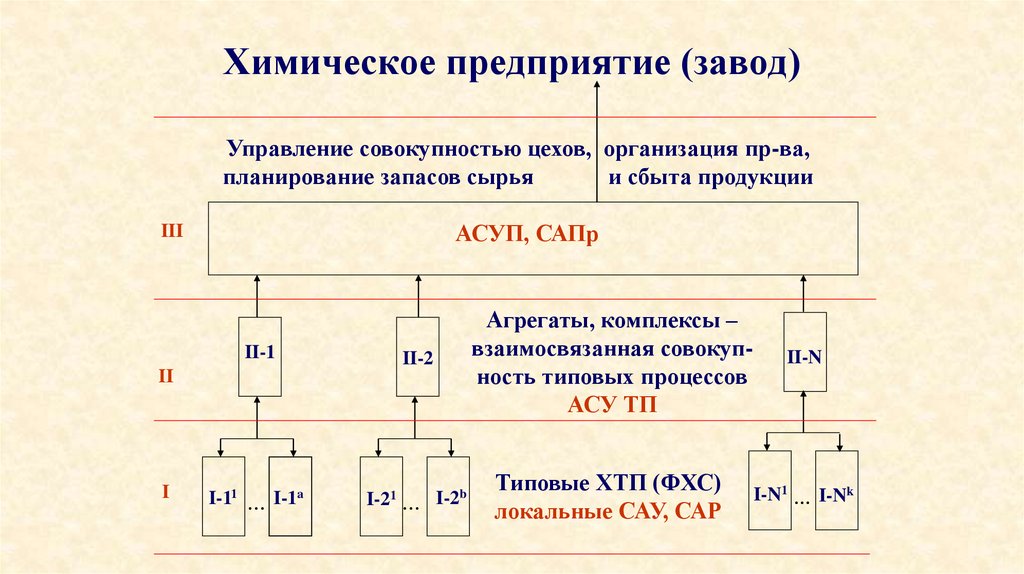
Химическое предприятие (завод)Управление совокупностью цехов, организация пр-ва,
планирование запасов сырья
и сбыта продукции
АСУП, САПр
III
II-1
II-2
II
I
I-11
…
I-1a
I-21
…
I-2b
Агрегаты, комплексы –
взаимосвязанная совокупность типовых процессов
АСУ ТП
II-N
Типовые ХТП (ФХС)
локальные САУ, САР
I-N1 … I-Nk
49.
Для решения задач II и III уровнейнеобходима оперативная подготовка МО на
I-ом уровне. Она достигается
максимальной формализацией и
автоматизацией процедур составления ММ
и свертывания их в модули с целью
последующей стыковки на II и III уровнях
для решения задач на этих ступенях.
Совокупность приемов, методов и средств
такой формализации составляет система
автоматического проектирования (САПр).
50.
Типовые ХТПдетерминированные
• перенос энергии и
импульса
• перенос вещества
• химические
превращения
(классическая
химическая
кинетика)
стохастические
• распределение частиц
субстанции во
времени и
пространстве
• распределение частиц
субстанции по
размерам
• модельные
представления
структуры потоков
51.
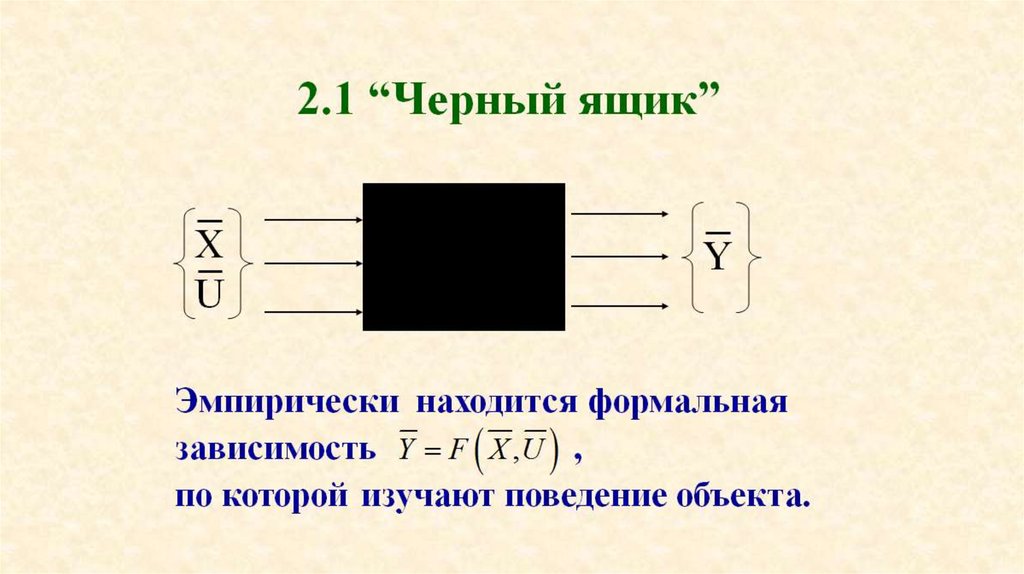
Стратегия системного анализа приматематическом описании ФХС
ФХС взаимодействует с
внешней средой и м.б. однозначно
описана через свои входы и
выходы, т.е. через входные и
выходные материальные и
тепловые потоки.
52.
53.
54.
55.
56.
57.
В общем случае Т-операторотображает совокупность линейных,
нелинейных, распределенных
в пространстве и переменных во
времени процессов.
Он имеет детерминированностохастическую природу.
По своей сути – это образ
моделируемого объекта в голове
у исследователя.
58.
Для чего вводится Т -оператор?Для того, чтобы понять природу
(суть) моделируемого процесса.
Наличие четкого представления
о физической природе процесса
позволяет исследователю выбрать
известный математический оператор
для синтеза модели или создать
собственный математический
оператор.
59.
Виды элементарныхтехнологических операторов ФХС
ОСНОВНЫЕ
• химического
превращения
• межфазного массообмена
• механического
смешения
• механического
разделения
• селективного
(диффузионного)
разделения
ВСПОМОГАТЕЛЬНЫЕ
• рекуперативного
теплообмена
• нагрева - охлаждения
• сжатия - расширения
• изменения агрегатного
состояния выходного
потока
60.
61.
62.
63.
В явной форме полный Ф -операторесть замкнутая система
дифференциальных, интегральных,
интегро-дифференциальных и др.
уравнений, дополненная
эмпирическими соотношениями,
а также начальными и граничными
условиями.
64.
65.
66.
Общая стратегия системного подхода кпостроению ММ
Для эффективного решения задач
управления ФХС необходима
стратегия, подчиняющая единой
цели все промежуточные этапы
подготовки МО. Такая стратегия
состоит из ряда этапов.
67.
Этапы подготовкиматематического описания ФХС:
• Качественный анализ структуры
ФХС.
• Синтез функционального
оператора.
• Проверка адекватности модели, и
идентификация функционального
оператора.
• Формализация процедур
стыковки модулей.
68.
1-ый этап: качественный анализструктуры ФХС
Основа этапа - система уравнений
гидродинамических потоков с
учетом протекания физикохимических процессов. Это база
создания мат. модели.
Задача этапа - вскрыть структуру
движущих сил теплои массопереноса между фазами.
69.
2-ой этап: выбор способа синтезафункционального оператора (3 способа):
• Формальный метод обработки
информации о входных
и выходных сигналах объекта
(например, «черный ящик»).
• Последовательное и обоснованное
структурное упрощение
обобщенного МО.
• Модельные представления.
70.
71.
2.2 Стратегия структурного упрощенияобобщенного математического описания (МО)
предполагает:
• оценку значимости величин, входящих
в обобщенное МО, и выявление
минимального числа наиболее значимых
факторов, определяющих поведение ФХС;
• соблюдение простоты и удобства
использования МО при сохранении
разумной степени его адекватности.
Недостаток - условия применимости МО
строго определены !
72.
Большинство существующихХТП – это процессы с малыми
параметрами ( P, υ, T ) , поэтому
при структурном упрощении
динамическими соотношениями
обычно пренебрегают и
ограничиваются балансами
массы и энергии.
73.
2.3 МОДЕЛЬНЫЙ ПОДХОД- набор (комбинация) идеальных
типовых операторов, позволяющий
учесть влияние важнейших
гидродинамических факторов на
макроуровне, а также учесть
стохастические свойства ФХС.
74.
По гибкости модельный подходпревосходит остальные способы
синтеза функционального
оператора: «черный ящик» и
способ структурного упрощения
обобщенного описания ФХС.
75.
Построение полного Ф-оператора всоответствии с блочным принципом
СА завершается агрегатированием
отдельных блоков («холодного
объекта» + блоков термокинетики
+ диффузионной + химической
кинетики). Проблема правильной
координации блоков решается с
помощью спец.алгоритмов на ЭВМ.
76.
3-й этап: проверка адекватностии идентификация Ф-оператора
ИДЕНТИФИКАЦИЯ –
научно-исследовательская операция
разработки оптимальной ММ
реальной системы
по экспериментальным данным
о входных X ,U и выходных Y
переменных объекта управления.
77.
Формулировка задачи идентификации:“ На основе совокупности сигналов x(t) и у(t),
полученных при идентификационных
экспериментах на реальной системе
и описывающихся уравнениями (2) ,
необходимо указать оператор м
из заданного класса математических
операторов, который наилучшим образом
описывал бы истинный Ф-оператор
на заданной совокупности сигналов x (t), у (t),
охватывающих по возможности все
возможные режимы функционирования
реальной ФХС/ХТС ”.
78.
АДЕКВАТНЫЙ adeaquatus (лат.) –приравненный, равный.
Адекватность – соответствие между
поведением модели и самим объектом
управления, т.е. верное математическое
описание поведения объекта.
При проверке адекватности
функционального оператора
выбирают критерий соответствия
модели реальному объекту.
79.
4-ый этап – формализацияпроцедур стыковки модулей
Основная проблема этапа правильная стыковка модулей
(решений) в единую систему.
Для уменьшения влияния
человеческого фактора она
выполняется формализованными
математическими методами на
ЭВМ (алгоритмы, программы).
80.
В результате реализациирассмотренных 4-х этапов
строится адекватная модель
объекта управления и
определяется метод/алгоритм
решения задач III уровня !!!
81.
Модели• ФИЗИЧЕСКИЕ
• МАТЕМАТИЧЕСКИЕ
Модель и объект
имеют
одинаковую
физическую
природу
(модель меньше
по масштабу)
Физическая природа
модели и объекта
различна, но
описывается
одинаковыми
уравнениями
82.
Физическое моделирование оправданопри изучении детерминированных
процессов (классические законы
физики и химии; однофазные системы
с фиксированными границами).
Недостатки:
а) искажение (деформирование) модели
погрешностями методик и СИ;
б) различные размеры объекта и
модели приводят к многоступенчатому
моделированию.
83.
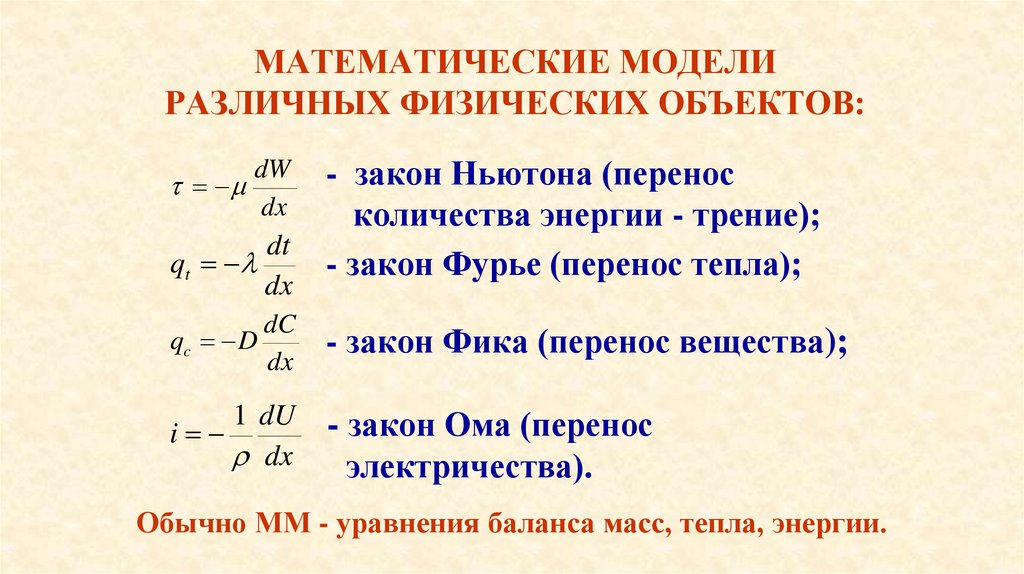
МАТЕМАТИЧЕСКИЕ МОДЕЛИРАЗЛИЧНЫХ ФИЗИЧЕСКИХ ОБЪЕКТОВ:
dW
dx
dt
qt
dx
- закон Ньютона (перенос
количества энергии - трение);
- закон Фурье (перенос тепла);
dC
qc D
dx
- закон Фика (перенос вещества);
1 dU
i
dx
- закон Ома (перенос
электричества).
Обычно ММ - уравнения баланса масс, тепла, энергии.
84.
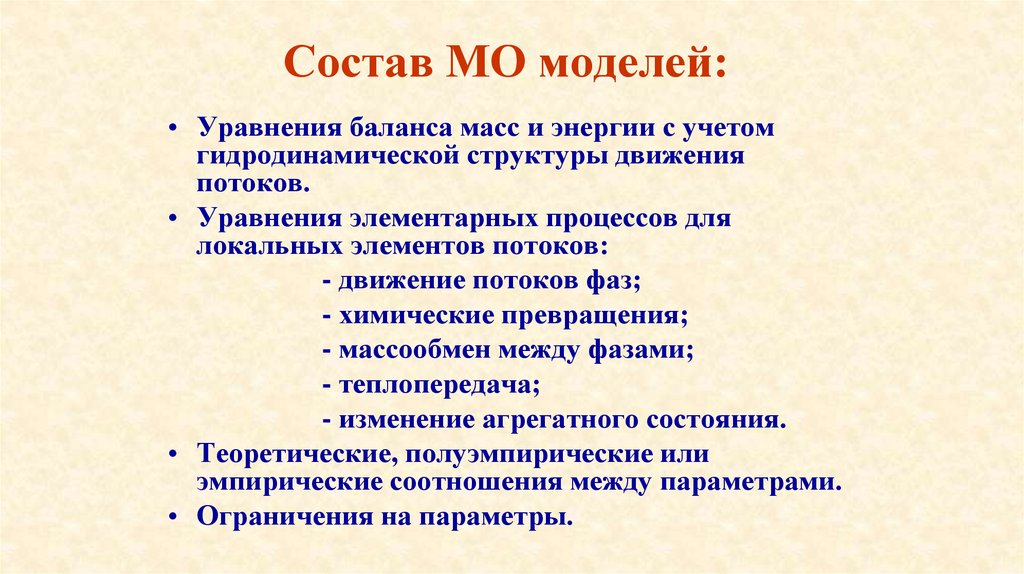
Состав МО моделей:• Уравнения баланса масс и энергии с учетом
гидродинамической структуры движения
потоков.
• Уравнения элементарных процессов для
локальных элементов потоков:
- движение потоков фаз;
- химические превращения;
- массообмен между фазами;
- теплопередача;
- изменение агрегатного состояния.
• Теоретические, полуэмпирические или
эмпирические соотношения между параметрами.
• Ограничения на параметры.
85.
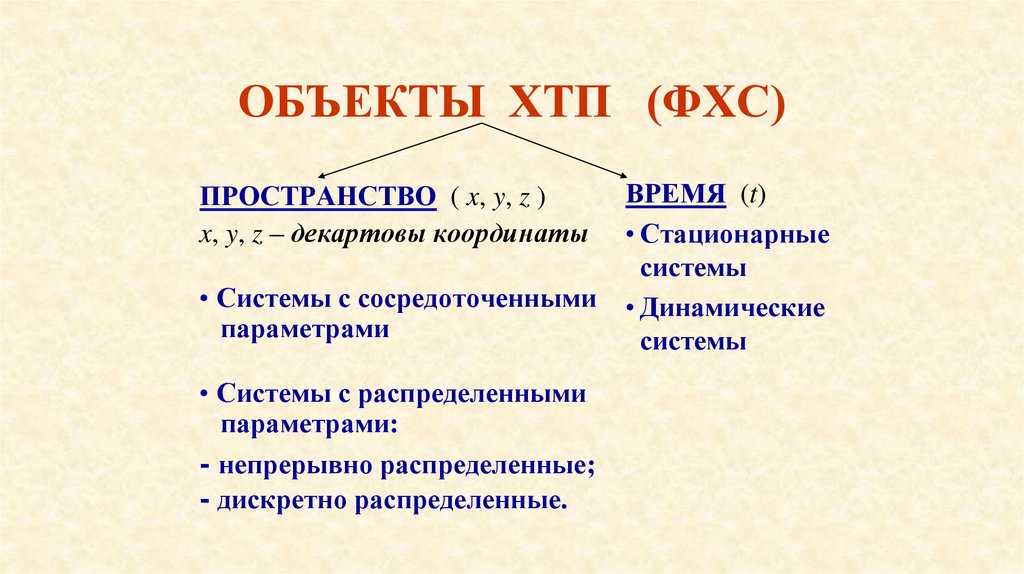
ОБЪЕКТЫ ХТП (ФХС)ПРОСТРАНСТВО ( x, y, z )
x, y, z – декартовы координаты
• Системы с сосредоточенными
параметрами
• Системы с распределенными
параметрами:
- непрерывно распределенные;
- дискретно распределенные.
ВРЕМЯ (t)
• Стационарные
системы
• Динамические
системы
86.
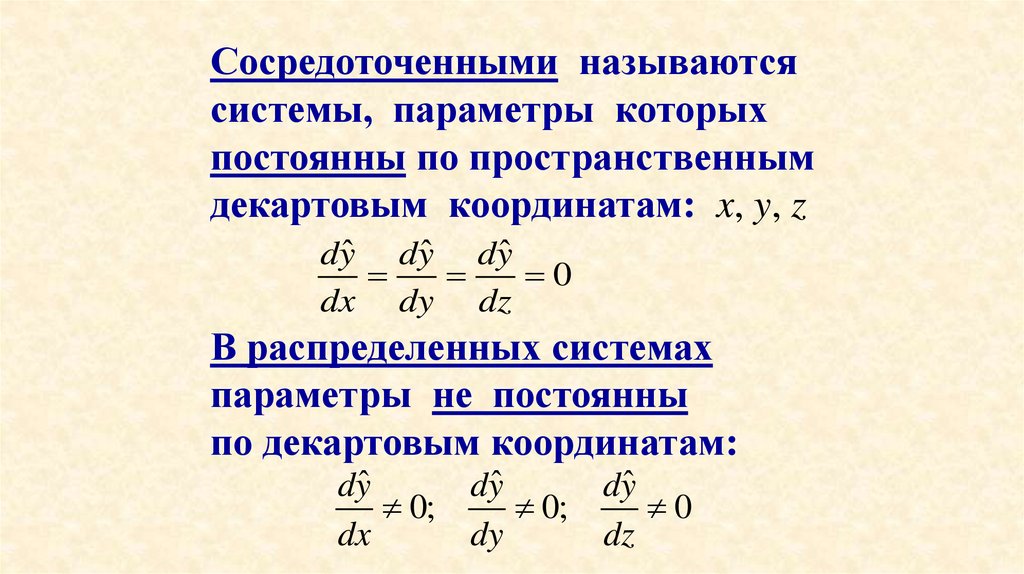
Сосредоточенными называютсясистемы, параметры которых
постоянны по пространственным
декартовым координатам: x, y, z
dyˆ dyˆ dyˆ
0
dx dy dz
В распределенных системах
параметры не постоянны
по декартовым координатам:
dyˆ
0;
dx
dyˆ
0;
dy
dyˆ
0
dz
87.
Стационарными называютсяобъекты (системы, процессы),
параметры которых не изменяются
во времени (t) dyˆ
.
0
dt
Динамические объекты
характеризуются изменением
параметров во времени d y
dt
0
.
88.
Характер гидродинамическогорежима потоков в системе
(стационарна она или динамична,
с сосредоточенными или
распределенными параметрами)
определяет тип математических
уравнений в модели.
89.
Типы уравнений МО моделей:- алгебраические,
трансцендентные, конечные;
- обыкновенные
дифференциальные уравнения;
- уравнения в частных
производных.
90.
ПРИМЕНЕНИЕ РАЗЛИЧНЫХТИПОВ УРАВНЕНИЙ:
КОНЕЧНЫЕ, АЛГЕБРАИЧЕСКИЕ,
ТРАНСЦЕНДЕНТНЫЕ УРАВНЕНИЯ
- используются для стационарных
систем с сосредоточенными
параметрами.
91.
ОБЫКНОВЕННЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ(указываются начальные условия!)
- для нестационарных систем с
сосредоточенными параметрами;
- или для стационарных систем
с параметрами, распределенными
не более, чем по 1-ой
пространственной координате
(например, по Z ) .
92.
УРАВНЕНИЯ В ЧАСТНЫХ ПРОИЗВОДНЫХ(кроме начальных условий указывают динамику или
конечные условия для стационарных процессов)
- для нестационарных систем
с параметрами, распределенными
по 2-м и более координатам;
- или для стационарных систем
с параметрами, распределенными по
всем пространственным координатам
(x, y, z).
93.
Классификация ММ по временными пространственным признакам
Модели с
сосредоточенными
параметрами
Модели с
распределенными
параметрами
Ячеечные
модели
Стационарные
модели
Нестационарные
модели
Квазистационарные
модели
94.
Модельный способ синтезаФ-оператора
95.
Основные типы гидродинамическихмоделей структуры потоков
Основу результирующего Ф-оператора
ФХС составляет набор типовых
идеализированных моделей. Одной
из них является «холодный» объект.
Каждая его модель отражает
определенный тип движения субстанции
в аппарате и характеризуется своим
элементарным Ф-оператором.
96.
Модель идеального смешения (ИС)Технологический оператор:
Модель соответствует структуре
потока, в которой частицы вещества,
поступающие на вход зоны идеального
смешения, мгновенно распределяются
по всему объему зоны так, что “ Сi ”
во всех точках зоны ИС
и на выходе из нее одинакова.
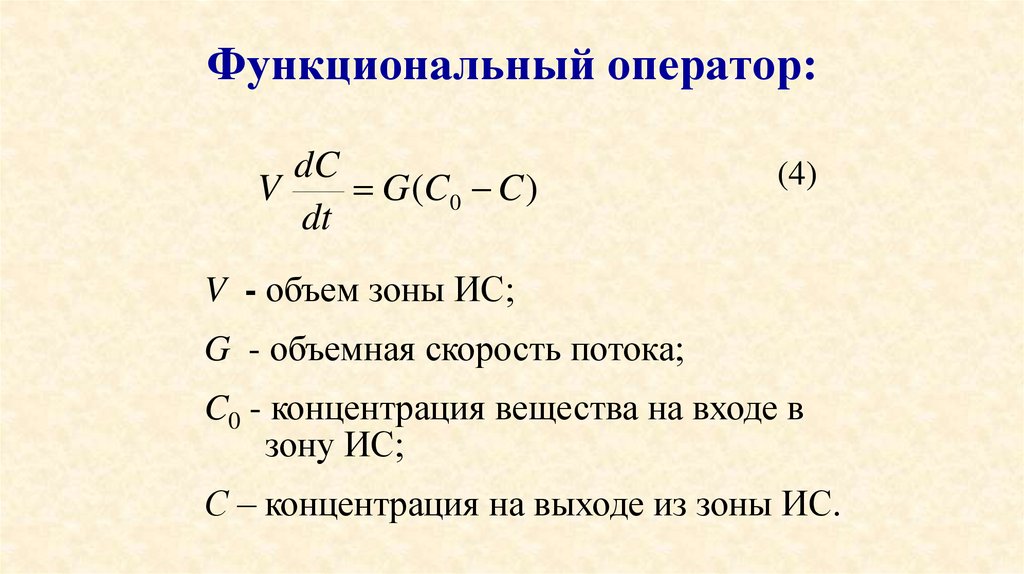
97.
Функциональный оператор:dC
V
G (C0 C )
dt
(4)
V - объем зоны ИС;
G - объемная скорость потока;
C0 - концентрация вещества на входе в
зону ИС;
С – концентрация на выходе из зоны ИС.
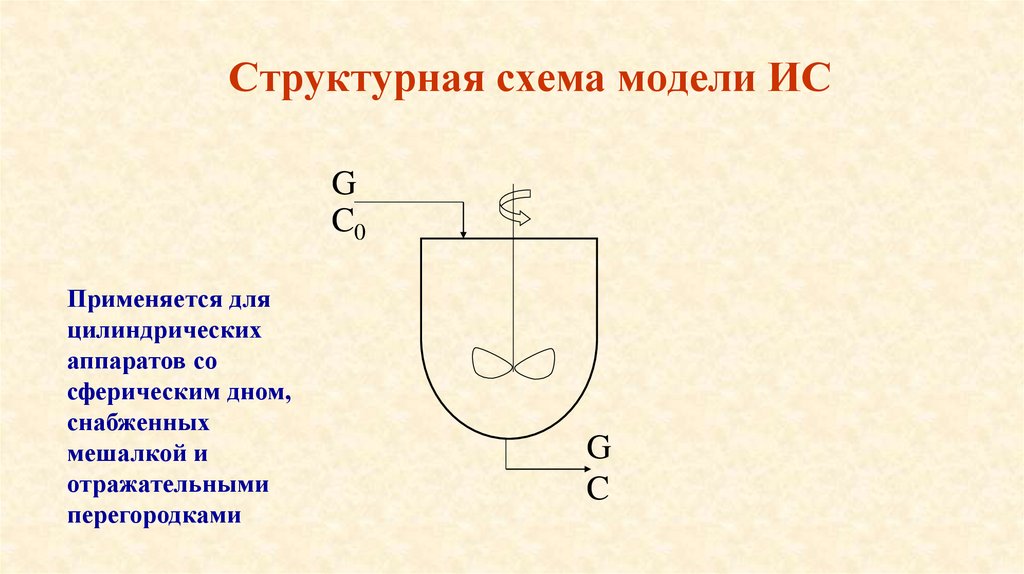
98.
Структурная схема модели ИСG
C0
Применяется для
цилиндрических
аппаратов со
сферическим дном,
снабженных
мешалкой и
отражательными
перегородками
G
C
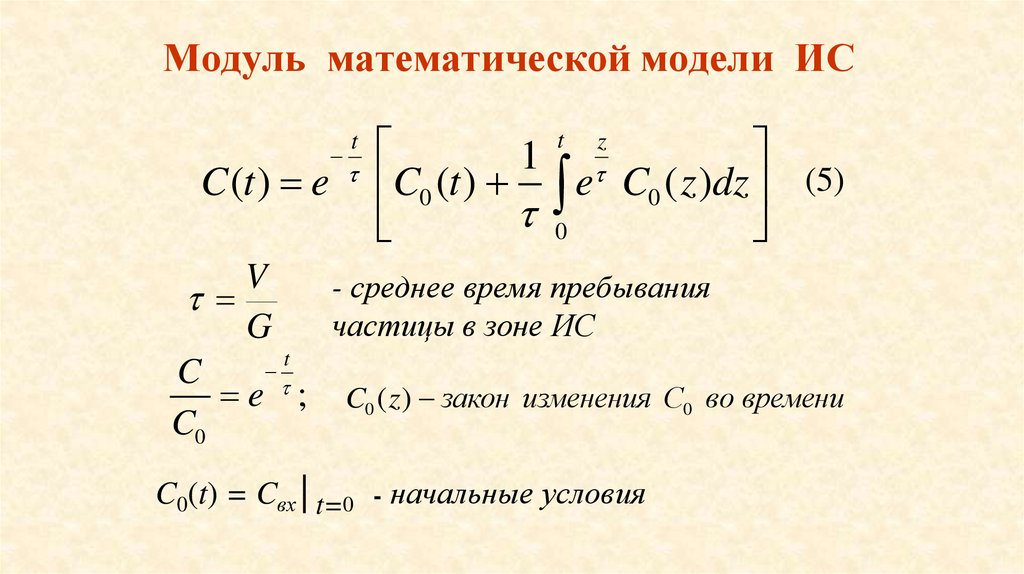
99.
Модуль математической модели ИСz
1
C (t ) e C0 (t ) e C0 ( z )dz (5)
0
t
t
V
- среднее время пребывания
частицы в зоне ИС
G
t
C
e ; C0 ( z) закон изменения С0 во времени
C0
C0(t) = Cвх│t=0 - начальные условия
100.
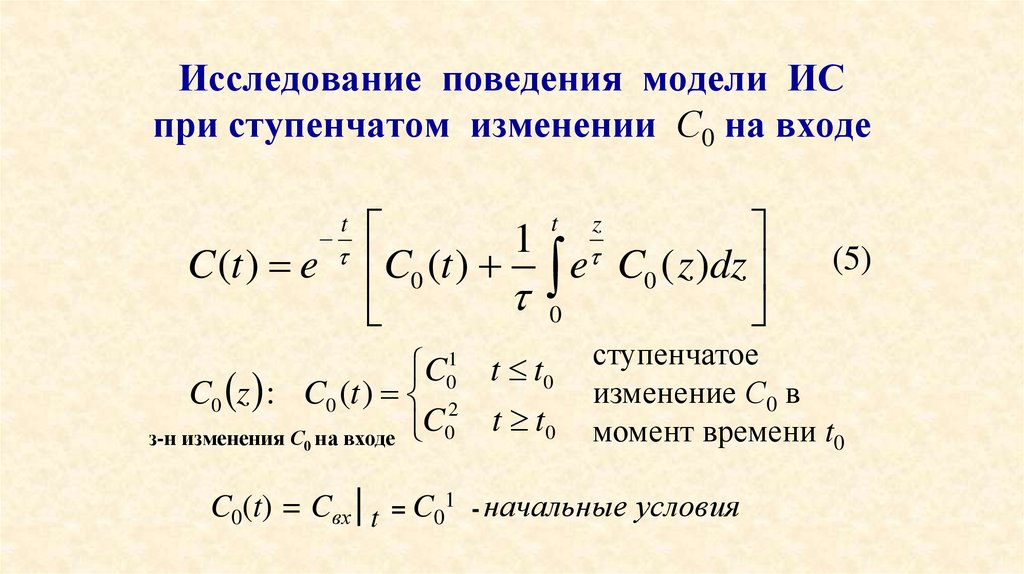
Исследование поведения модели ИСпри ступенчатом изменении С0 на входе
1
C (t ) e C0 (t ) e C0 ( z )dz
0
t
t
C01 t t0
C0 z : C0 (t ) 2
C t t0
з-н изменения С0 на входе 0
z
(5)
ступенчатое
изменение С0 в
момент времени t0
C0(t) = Cвх│t = C01 - начальные условия
101.
Модель идеального вытесненияТехнологический оператор:
Модель соответствует
гидродинамической структуре
поршневого движения потоков, при
котором перемешивание субстанций в
обратном направлении движению потока
отсутствует, а в ортогональном
направлении движению потока
в локальном объеме происходит ИС.
102.
Структурная схема модели ИВx=0
x=l
G
C0
G
C
dV
локальный объем
Модель применяется для трубчатых
аппаратов с l / d ≥ 20-100
103.
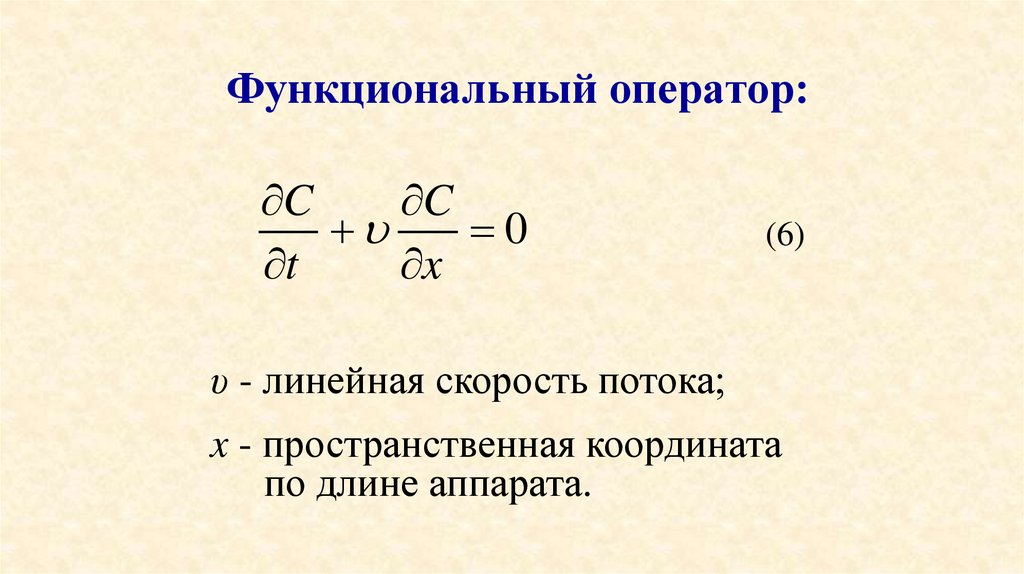
Функциональный оператор:C
C
0
t
x
(6)
υ - линейная скорость потока;
x - пространственная координата
по длине аппарата.
104.
Вопрос: Почему уравнение (6)приведено в частных
производных,
а ур-е (4) - это обыкновенное
дифференциальное уравнение?
Подсказка: параметры систем
ИС и ИВ распределены или
сосредоточены, стационарны
или динамичны?
105.
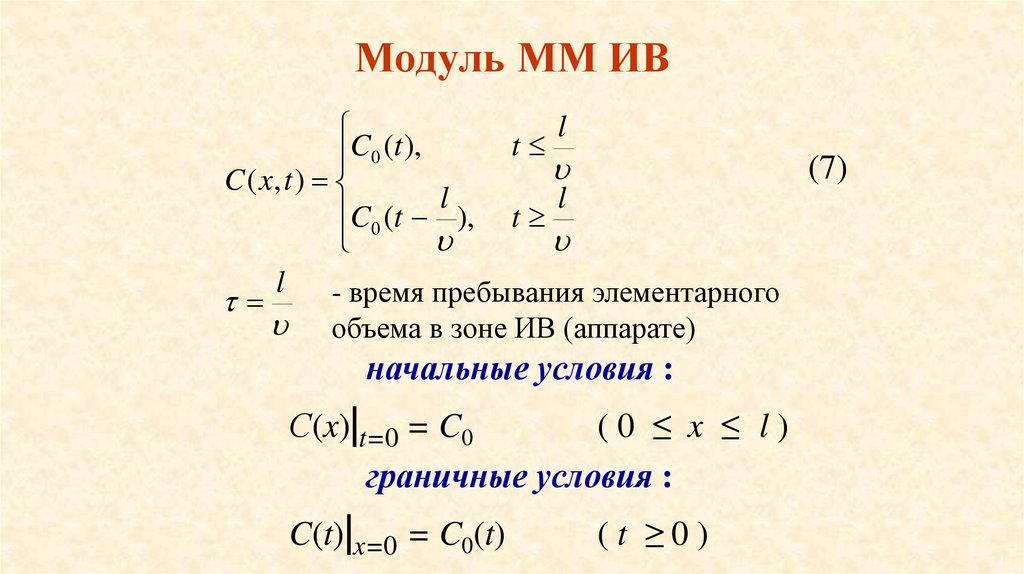
Модуль ММ ИВl
t
C0 (t ),
(7)
C ( x, t )
l
l
C0 (t ), t
l
- время пребывания элементарного
объема в зоне ИВ (аппарате)
начальные условия :
С(x)|t=0 = C0
(0 ≤ x ≤ l)
граничные условия :
C(t)|x=0 = C0(t)
(t ≥0)
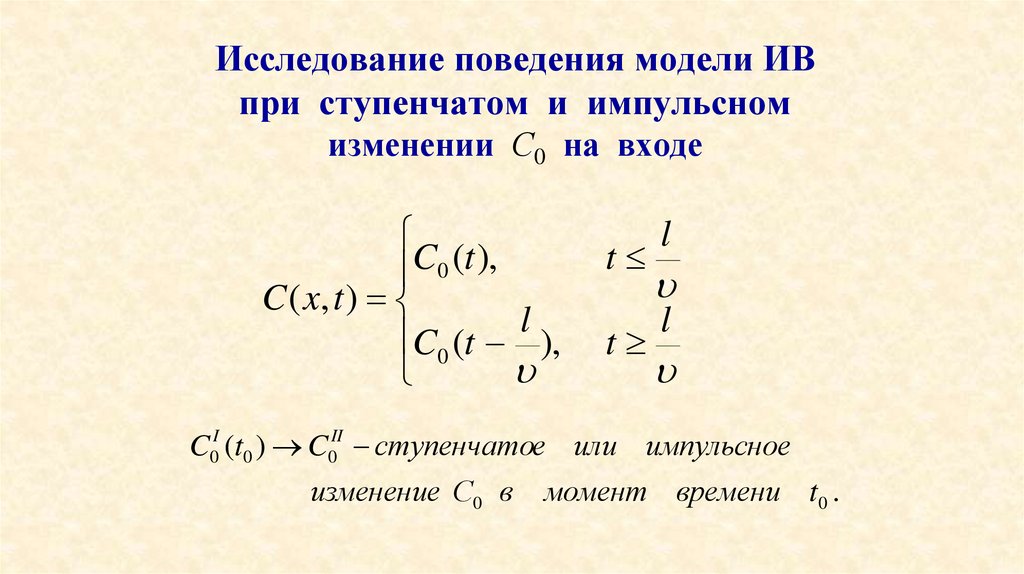
106.
Исследование поведения модели ИВпри ступенчатом и импульсном
изменении С0 на входе
C0 (t ),
C ( x, t )
l
C0 (t ),
t
t
l
l
C0I (t0 ) C0II ступенчатое или импульсное
изменение С0 в
момент времени t0 .
107.
Однопараметрическаядиффузионная модель (ОПДМ)
Технологический оператор:
Модель соответствует гидродинамической
структуре ИВ поршневого потока
с перемешиванием в обратном направлении
движению потока.
Допущения:
1 Продольное перемешивание (ПП) м.б.
описано уравнениями, аналогичными закону
молекулярной диффузии (D - коэфф. ПП
определяется экспериментально) .
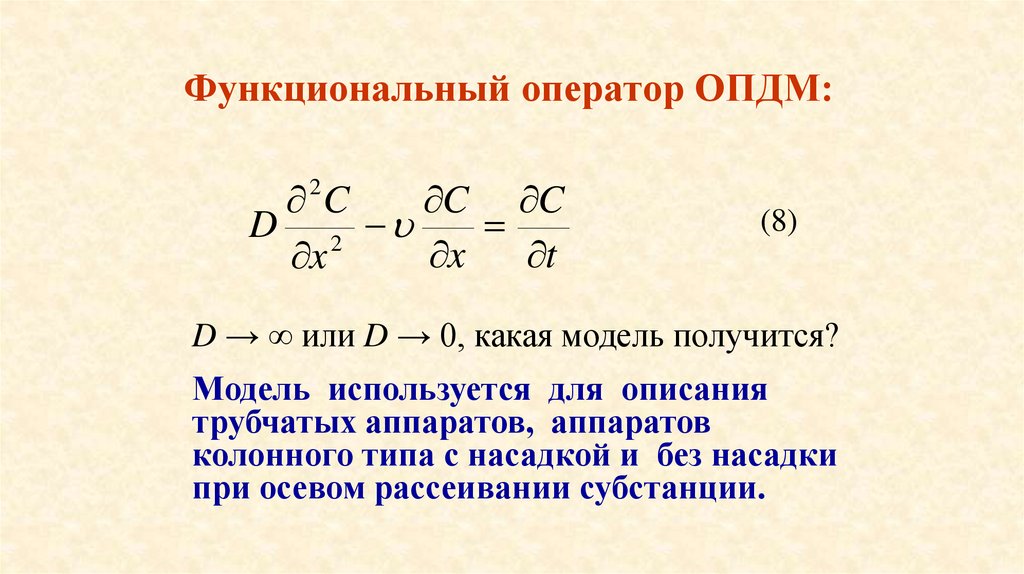
108.
Функциональный оператор ОПДМ:C
C C
D 2
x
t
x
2
(8)
D → ∞ или D → 0, какая модель получится?
Модель используется для описания
трубчатых аппаратов, аппаратов
колонного типа с насадкой и без насадки
при осевом рассеивании субстанции.
109.
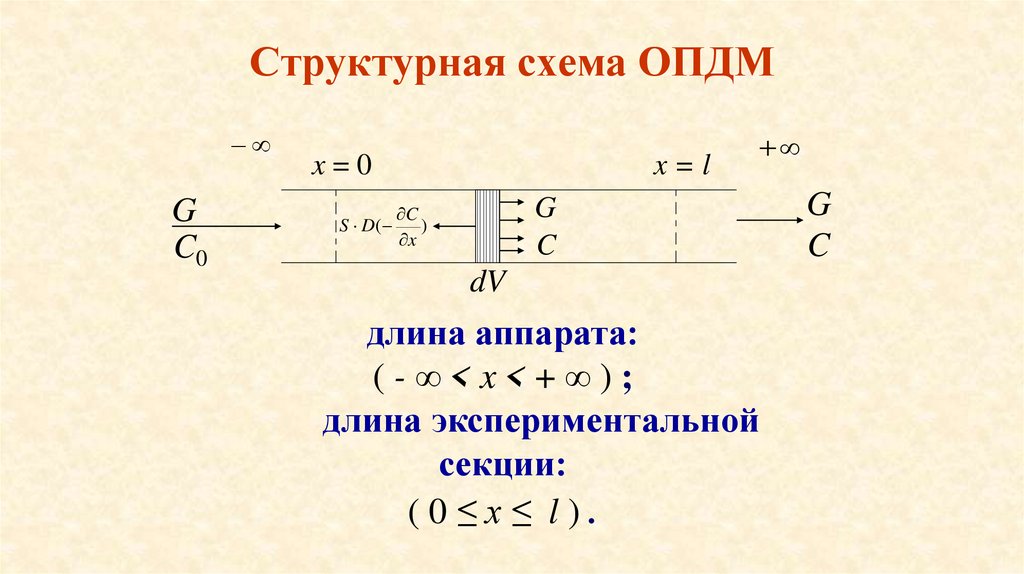
Структурная схема ОПДМG
C0
x=0
x=l
G
C
C
S D(
)
x
dV
длина аппарата:
(-∞<x<+∞);
длина экспериментальной
секции:
(0≤x≤ l).
G
C
110.
Сводка решений для различныхусловий приведена в литературе
(см. книги Кафарова В.В.)
Для приведенных ниже
начальных и граничных условий:
начальные условия:
С(x)|t=0 = C0
(-∞<x<+∞)
граничные условия:
C(t)|x=0 = C0(t)
(t>0)
модуль описывается выражением (9).
111.
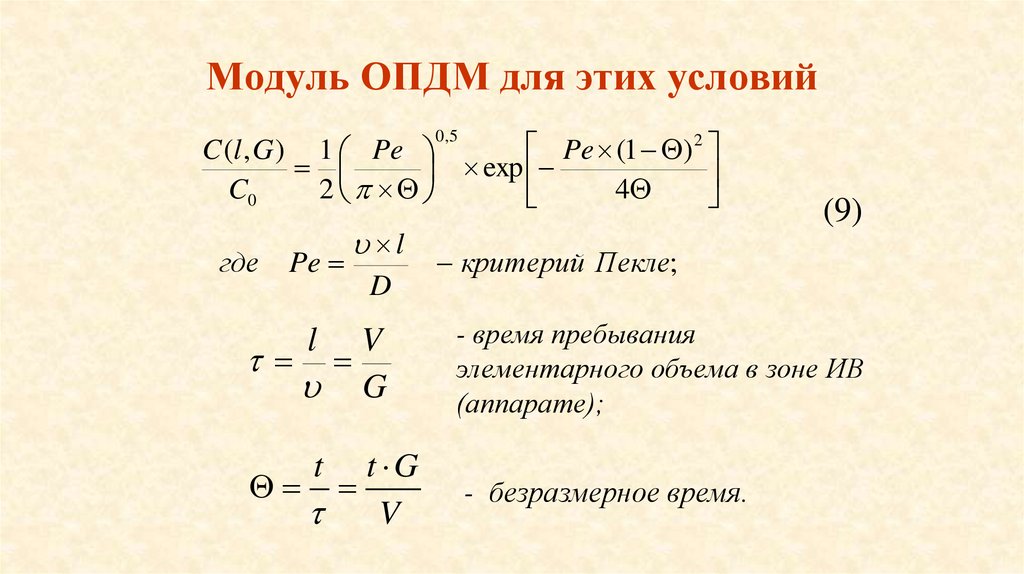
Модуль ОПДМ для этих условийPe (1 ) 2
C (l , G ) 1 Pe
exp
C0
2
4
0,5
где
Pe
l
D
(9)
критерий Пекле;
V
G
- время пребывания
элементарного объема в зоне ИВ
(аппарате);
t G
V
- безразмерное время.
l
t
112.
Двухпараметрическая диффузионная модельТехнологический оператор:
Поток аналогичен гидродинамической
структуре однопараметрической
диффузионной модели; + дополнительно
присутствует перемешивание в
радиальном направлении.
Используется для описания трубчатых
аппаратов, аппаратов колонного типа с
небольшим “l/d ” и большой поперечной
неравномерностью скоростей потоков.
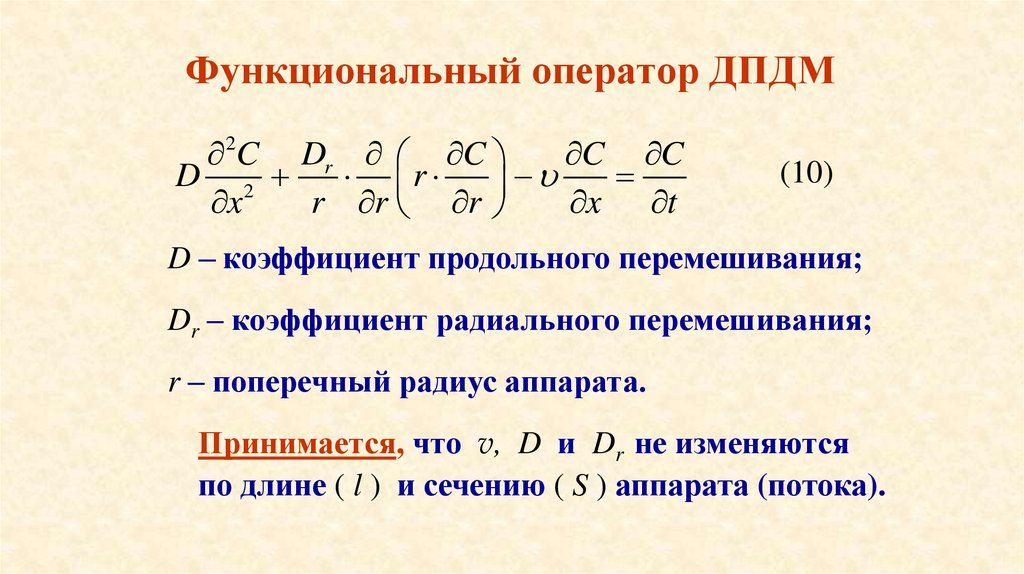
113.
Функциональный оператор ДПДМ2C Dr C
C C
D 2
r
x
r r r
x t
(10)
D – коэффициент продольного перемешивания;
Dr – коэффициент радиального перемешивания;
r – поперечный радиус аппарата.
Принимается, что v, D и Dr не изменяются
по длине ( l ) и сечению ( S ) аппарата (потока).
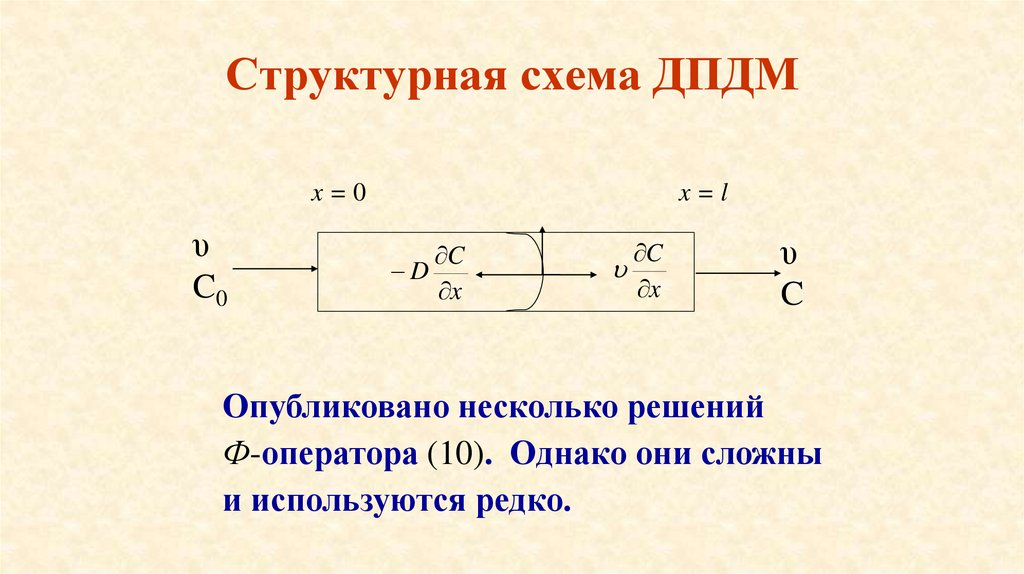
114.
Структурная схема ДПДМx=0
υ
C0
x=l
C
D
x
C
x
υ
C
Опубликовано несколько решений
Ф-оператора (10). Однако они сложны
и используются редко.
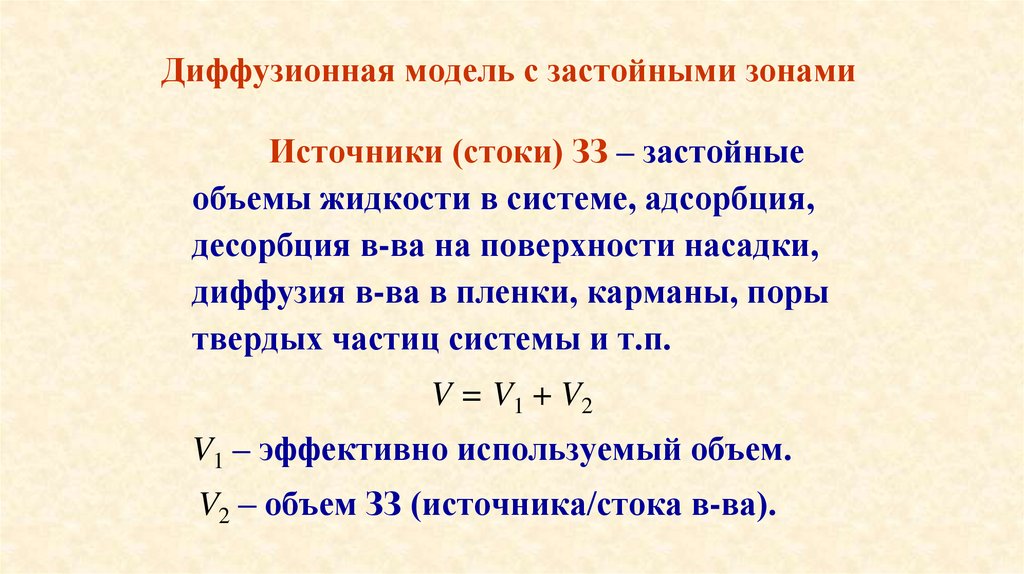
115.
Диффузионная модель с застойными зонамиИсточники (стоки) ЗЗ – застойные
объемы жидкости в системе, адсорбция,
десорбция в-ва на поверхности насадки,
диффузия в-ва в пленки, карманы, поры
твердых частиц системы и т.п.
V = V1 + V2
V1 – эффективно используемый объем.
V2 – объем ЗЗ (источника/стока в-ва).
116.
Технологический оператор:Гидродинамика потока
соответствует структуре потока
ОПДМ с обменом вещества
между проточной и застойной
зонами.
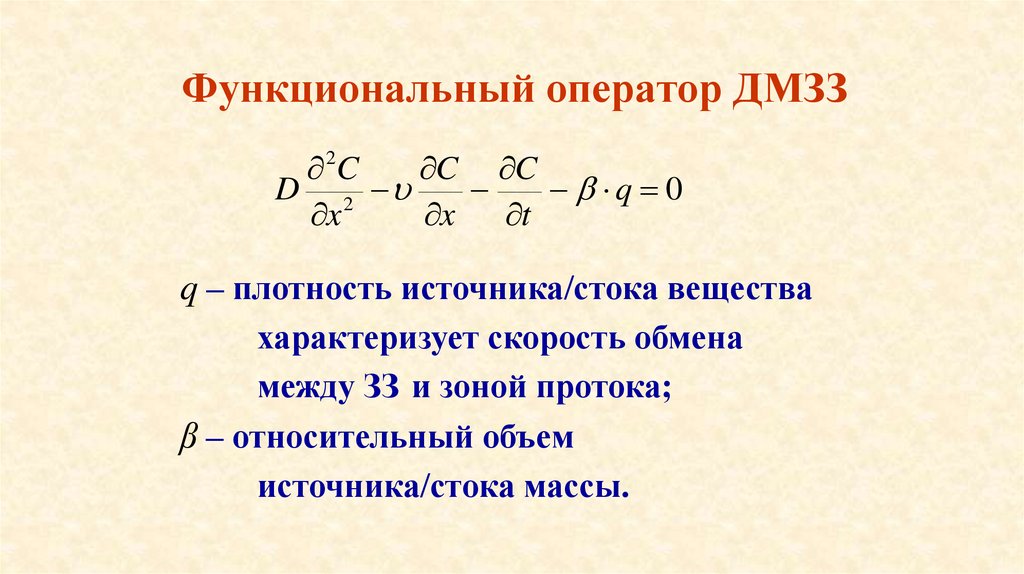
117.
Функциональный оператор ДМЗЗC
C C
D 2
q 0
x
x
t
2
q – плотность источника/стока вещества
характеризует скорость обмена
между ЗЗ и зоной протока;
β – относительный объем
источника/стока массы.
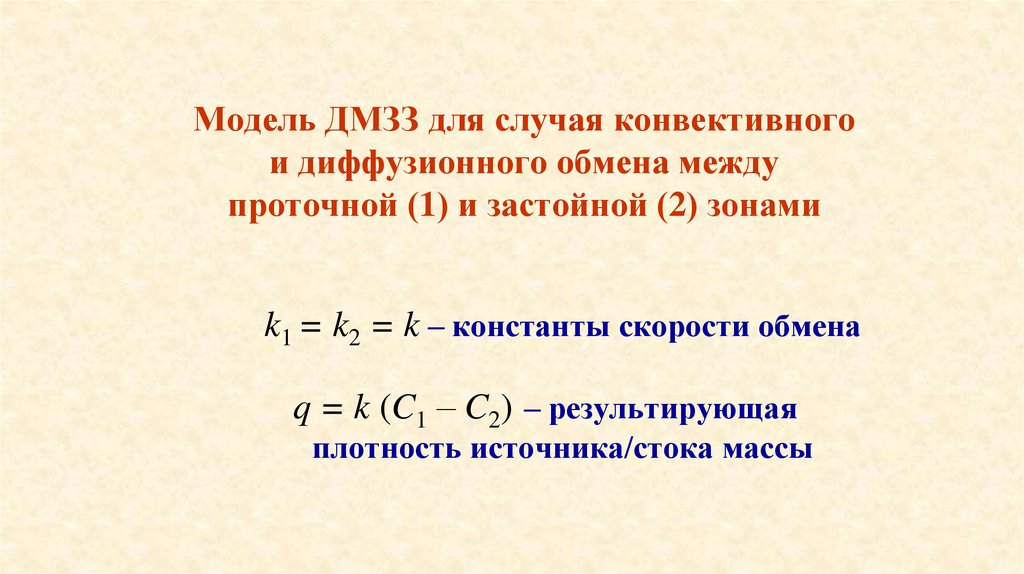
118.
Модель ДМЗЗ для случая конвективногои диффузионного обмена между
проточной (1) и застойной (2) зонами
k1 = k2 = k – константы скорости обмена
q = k (C1 – C2) – результирующая
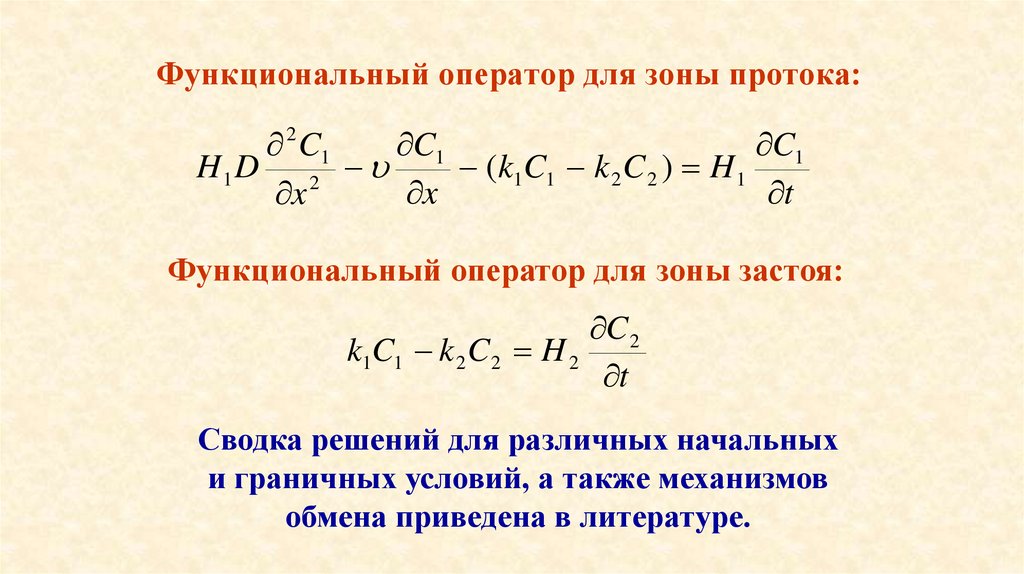
плотность источника/стока массы
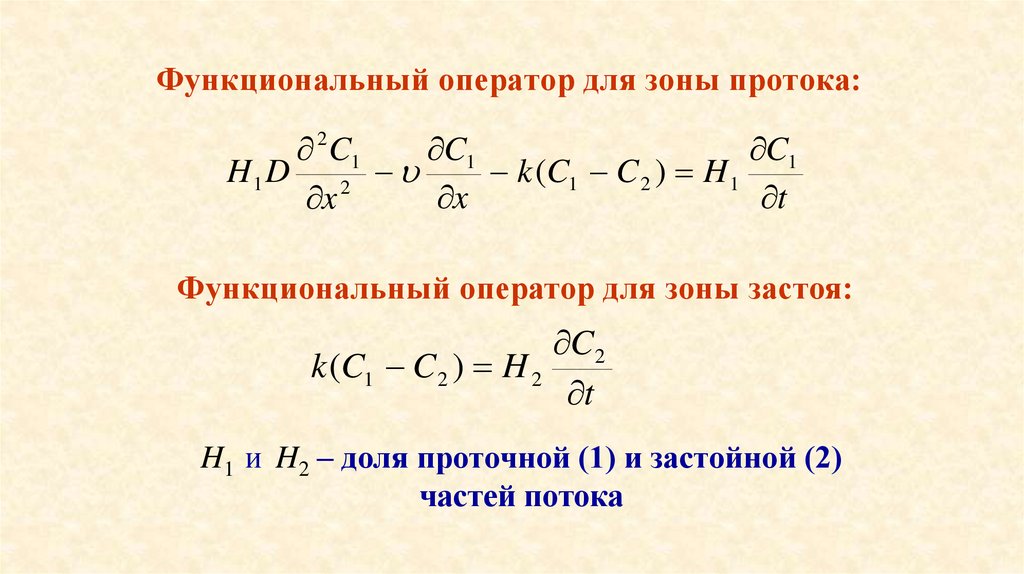
119.
Функциональный оператор для зоны протока:2 C1
C1
C1
H1 D 2
k (C1 C 2 ) H 1
x
t
x
Функциональный оператор для зоны застоя:
C 2
k (C1 C 2 ) H 2
t
H1 и H2 – доля проточной (1) и застойной (2)
частей потока
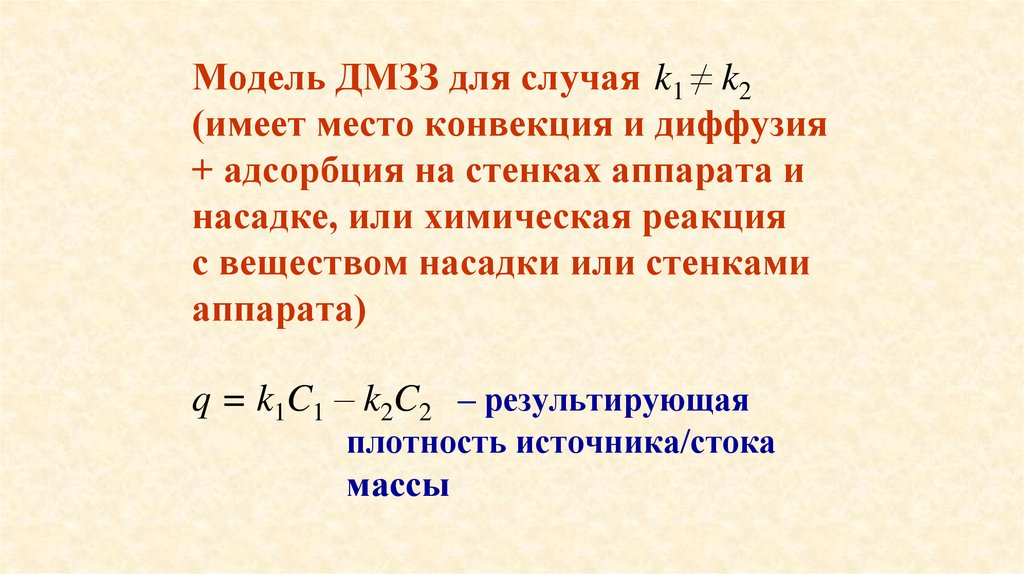
120.
Модель ДМЗЗ для случая k1 ≠ k2(имеет место конвекция и диффузия
+ адсорбция на стенках аппарата и
насадке, или химическая реакция
с веществом насадки или стенками
аппарата)
q = k1C1 – k2C2 – результирующая
плотность источника/стока
массы
121.
Функциональный оператор для зоны протока:2 C1
C1
C1
H1 D 2
(k1C1 k 2 C 2 ) H 1
x
t
x
Функциональный оператор для зоны застоя:
C 2
k1C1 k 2 C 2 H 2
t
Сводка решений для различных начальных
и граничных условий, а также механизмов
обмена приведена в литературе.
122.
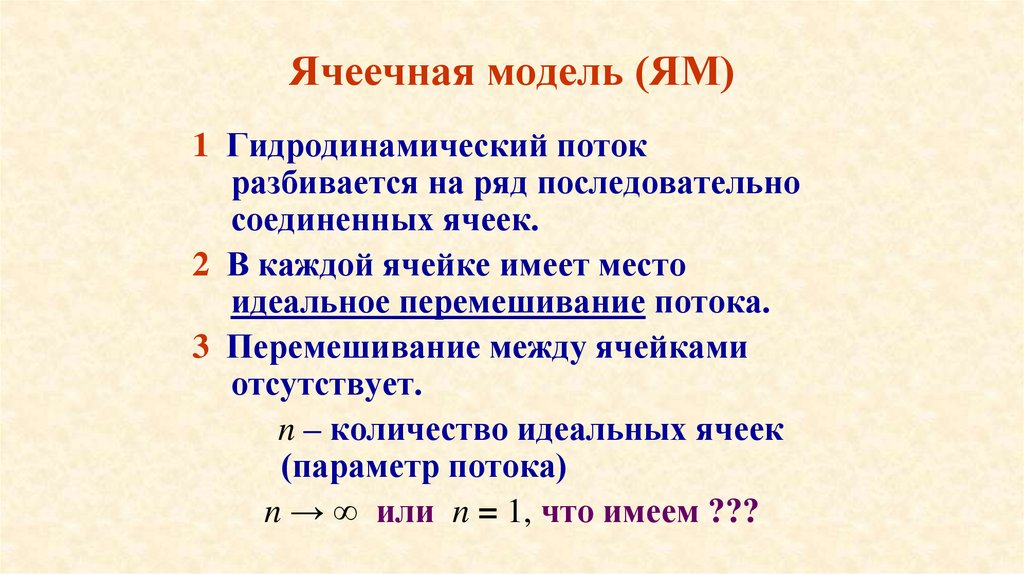
Ячеечная модель (ЯМ)1 Гидродинамический поток
разбивается на ряд последовательно
соединенных ячеек.
2 В каждой ячейке имеет место
идеальное перемешивание потока.
3 Перемешивание между ячейками
отсутствует.
n – количество идеальных ячеек
(параметр потока)
n → ∞ или n = 1, что имеем ???
123.
ЯМ применяется для каскадааппаратов с мешалками, для
абсорбционных колонн
и экстракционных аппаратов,
аппаратов с псевдоожиженным
слоем.
124.
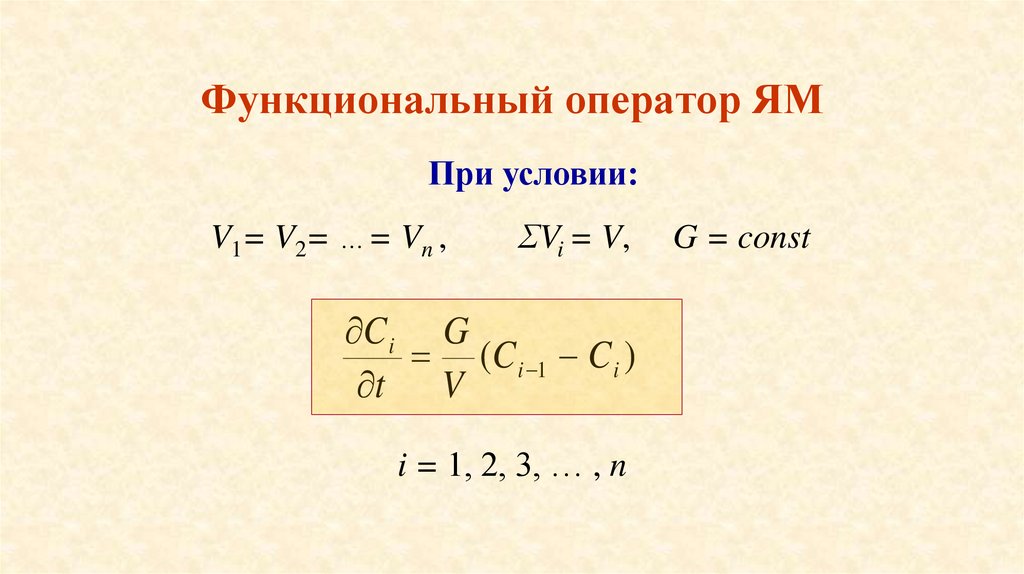
Функциональный оператор ЯМПри условии:
V1= V2= …= Vn ,
ΣVi = V,
C i G
(C i 1 C i )
t V
i = 1, 2, 3, … , n
G = const
125.
Модуль ячеечной моделиДля начальных условий:
С|t=0 = C0
( n 1)
C n
n
e
C0
(n 1)!
t
V
G
- безразмерное время;
- среднее время пребывания
частицы в аппарате.
126.
Простейшие комбинированные модели• ИС с застойной зоной;
• ИС с байпасом;
• ИВ с рециклом;
• последовательное соединение ИВ и ИС;
• параллельное соединение ИВ и ИС.
где m – доля потока ячейки ИС;
b – доля потока ячейки ИВ;
d – доля потока застойной зоны;
λ, r – доля байпасного и
рециркуляционного потоков соответственно.
127.
Элементарные функциональныеоператоры при блочном
построении моделей
Блоки термокинетики и
диффузионной кинетики
Гидродинамическим потоком
в аппарате перераспределяется
не только вещество, но и энергия.
128.
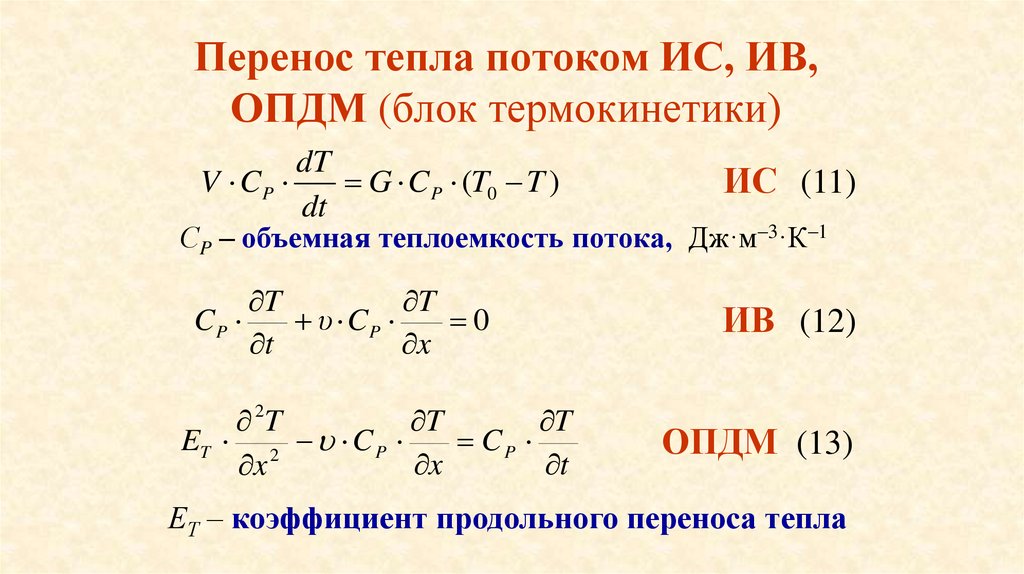
Перенос тепла потоком ИС, ИВ,ОПДМ (блок термокинетики)
dT
V CP
G C P (T0 T )
dt
ИС (11)
T
T
CP
υ CP
0
t
x
ИВ (12)
СP – объемная теплоемкость потока, Дж·м–3·К–1
T
T
T
ET 2 C P
CP
x
t
x
2
ОПДМ (13)
ЕТ – коэффициент продольного переноса тепла
129.
МАСООБМЕН ПРИ НАЛИЧИИИСТОЧНИКОВ/СТОКОВ ВЕЩЕСТВА
В ПОТОКЕ
(блок диффузионной кинетики)
Введем понятие источника/стока вещества qi
130.
Массообмен с окружающей средой(при наличии источников/ стоков
в-ва) сопровождается изменением
G, V, СР , D , Dr , υ ,
поэтому необходимо описывать закон
их изменения.
131.
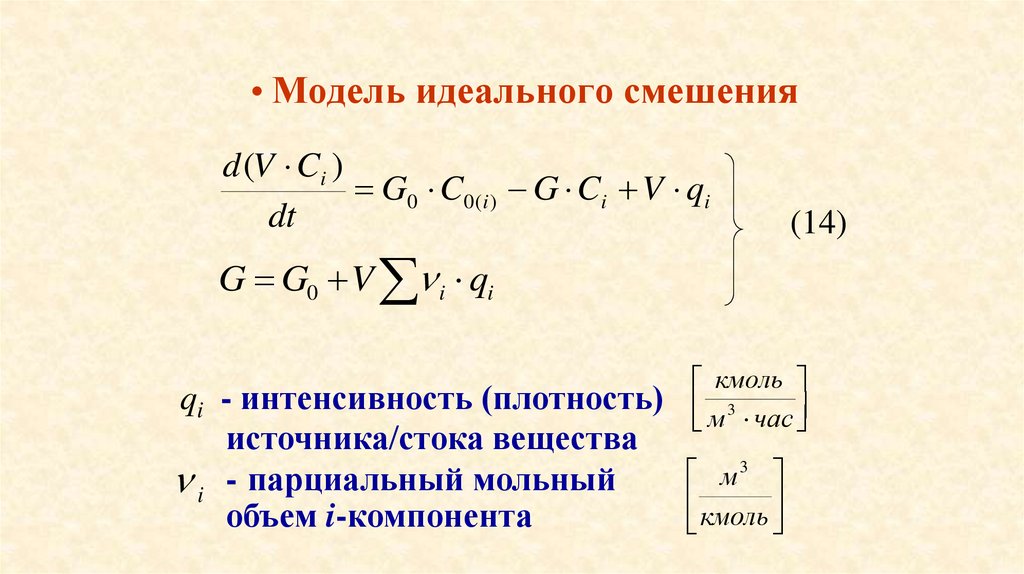
• Модель идеального смешенияd (V Ci )
G0 C0(i ) G Ci V qi
dt
(14)
G G0 V i qi
кмоль
м 3 час
qi - интенсивность (плотность)
источника/стока вещества
3
м
i - парциальный мольный
объем i-компонента
кмоль
132.
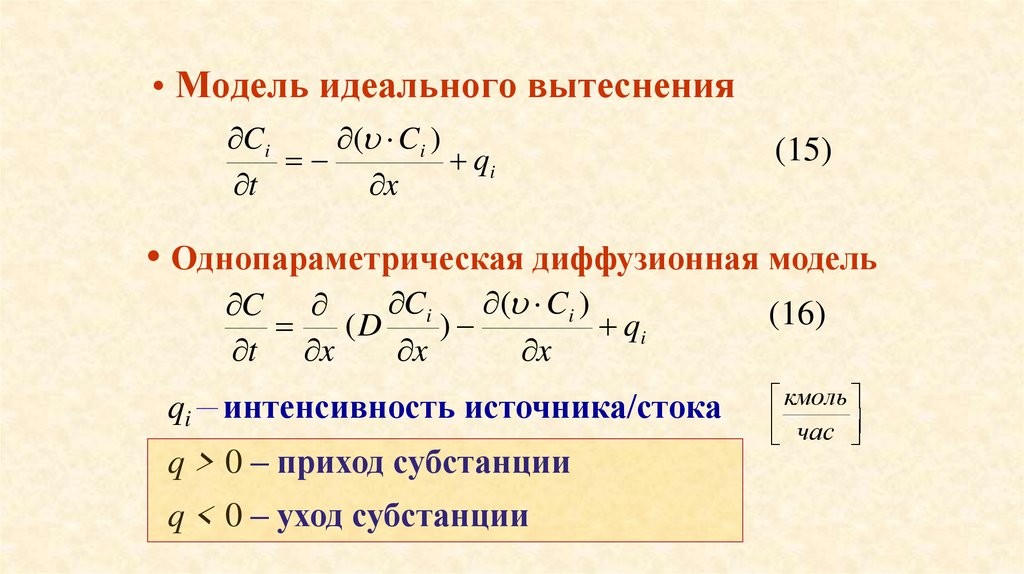
• Модель идеального вытесненияCi
( Ci )
qi
t
x
(15)
• Однопараметрическая диффузионная модель
Ci
( Ci )
C
(D
)
qi
t x
x
x
qi – интенсивность источника/стока
q > 0 – приход субстанции
q < 0 – уход субстанции
(16)
кмоль
час
133.
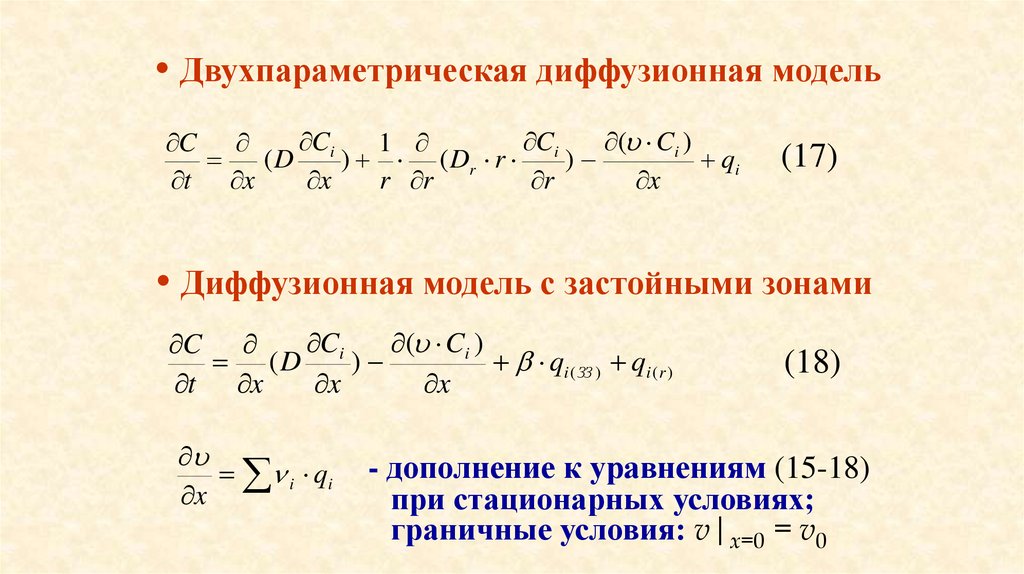
• Двухпараметрическая диффузионная модельCi
Ci
( Ci )
C
1
(D
) ( Dr r
)
qi
t x
x
r r
r
x
(17)
• Диффузионная модель с застойными зонами
Ci
( Ci )
C
(D
)
qi ( ЗЗ ) qi ( r )
t x
x
x
i qi
x
(18)
- дополнение к уравнениям (15-18)
при стационарных условиях;
граничные условия: v|x=0 = v0
134.
ПЕРЕНОС ТЕПЛА ПРИ НАЛИЧИИИСТОЧНИКОВ / СТОКОВ
ТЕПЛА И МАССЫ
В ГИДРОДИНАМИЧЕСКОМ ПОТОКЕ
(блок термокинетики)
135.
Тепло- и массообмен с окружающейсредой (при наличии источников/
стоков в-ва и энергии) сопровождается
изменением
G, V, СР , ЕТ , υ ,
поэтому тоже необходимо описывать
закон их изменения.
136.
• Модель идеального смешенияВведем понятие qТ – интенсивность
источника/стока тепла [кДж·м-3 ·час-1]
d (V C p T )
dt
G0 CP0 T0 G CP T V qT
G G0 V i qi
(19)
137.
• Модель идеального вытеснения(C P T )
( C P T )
qT
t
x
(20)
• Однопараметрическая диффузионная модель
(C P T )
( C P T )
T
( ET
)
qT
t
x
x
x
(21)
138.
В уравнениях (14-21) плотностьисточника/стока вещества qi , энергии qT
есть функция многих переменных:
qi (qТ ) = f (T, C, … др. параметров).
Поэтому уравнения (14-21) необходимо
интегрировать совместно с уравн-ми,
описывающими изменение всех без
исключения параметров, от значений
которых зависят qi и qT .
139.
Блоки химической кинетикии термокинетики при протекании
химической реакции в потоке.
Введем понятие плотности
источника /стока вещества и
энергии за счет химической
реакции.
140.
ХИМИЧЕСКАЯ РЕАКЦИЯкак источник массы в потоке
Плотность (qi) источника/стока массы равна
скорости химической реакции (ωr) и зависит
от Т и Сi :
n
qi ri k Ci i
ki k 0 i e
Ei
R T
Ei – энергия активации
реакции
Подстрочный индекс i означает, что это источник вещества.
141.
ХИМИЧЕСКАЯ РЕАКЦИЯкак источник тепла в потоке
Введем понятие интенсивности
(плотности) источника тепла (Qr)
в потоке за счет хим.реакции.
142.
Интенсивность (Qr) источника/стокатепла = суммарному тепловому эффекту
( qТr ) всех химических реакций:
Qr qT ri
Подстрочный индекс при Qr означает,
что источник энергии – химическая реакция (r).
143.
Модели массои теплообмена потокас окружающей средой
(qi , qT)
- интенсивность
источников/стоков
i – массы,
T – температуры
144.
Массообмен потока с окружающей средойq i m (i ) интенсивность источника/стока
= скорости массообмена (ωm)
m(i ) Fm K m (C Ci )
*
i
Fm- поверхность массообмена
Km- коэффициент массообмена
Ci* - равновесная концентрация в-ва
в среде, с которой происходит обмен
145.
Теплообмен потока с окружающей средойqT QT
интенсивность источника/стока
= скорости теплообмена ( QT )
QT FT K T (Ti Ti )
*
FТ - поверхность теплообмена
KТ - коэффициент теплообмена
Тi* - температура среды, с которой
происходит теплообмен
146.
Совместное протекание химическойреакции и процессов массои теплообмена с окружающей средой
Интегральная интенсивность
источников/стоков массы ( qi )
и тепла ( qT ) будет равна сумме
скоростей элементарных процессов:
qi r ( i ) m ( i )
qT Qr QT
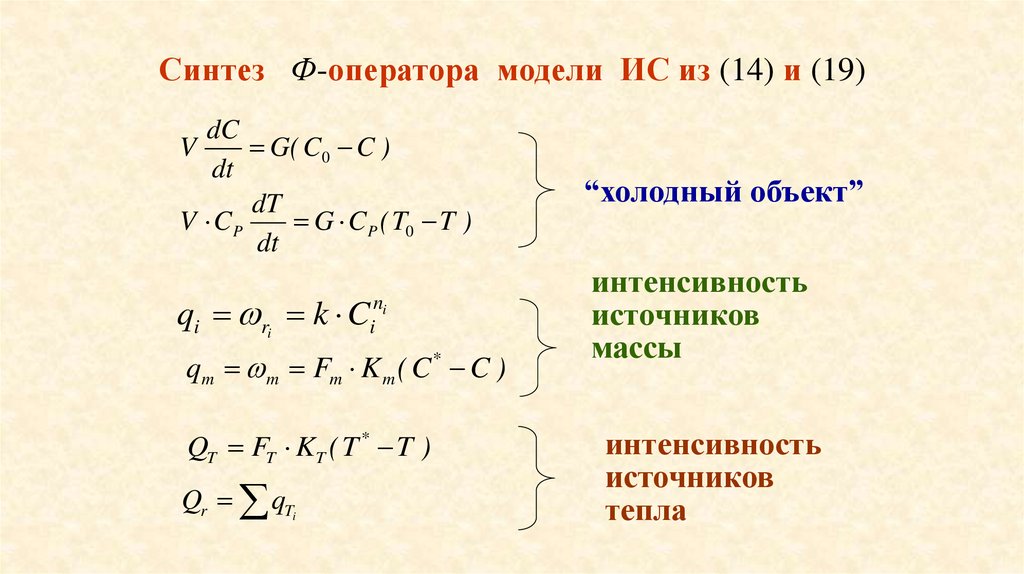
147.
Синтез Ф-оператора модели ИС из (14) и (19)dC
V
G( C 0 C )
dt
dT
V CP
G C P ( T0 T )
dt
“холодный объект”
qi ri k C
интенсивность
источников
массы
ni
i
qm m Fm K m ( C* C )
QT FT KT ( T * T )
Qr qTi
интенсивность
источников
тепла
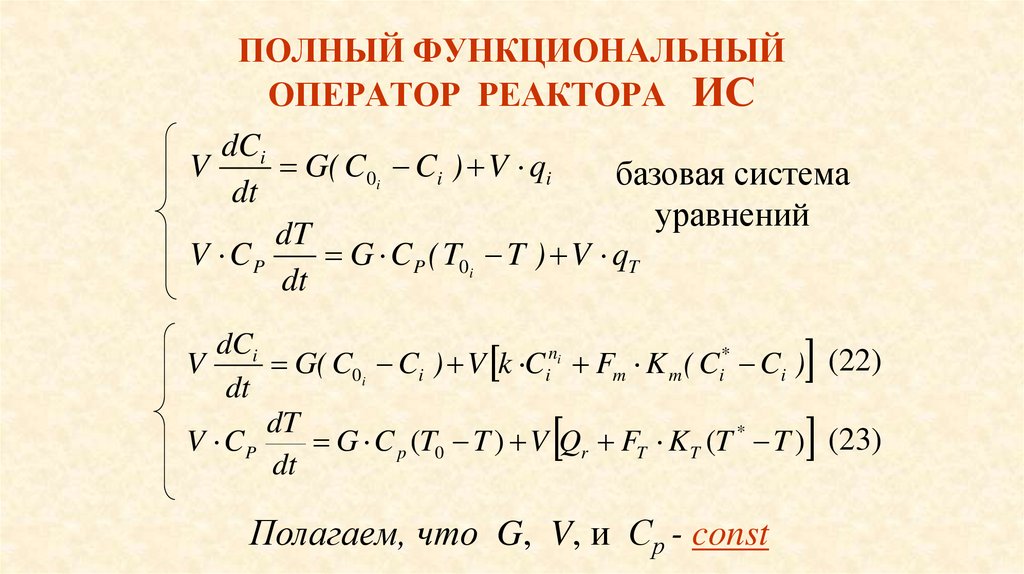
148.
ПОЛНЫЙ ФУНКЦИОНАЛЬНЫЙОПЕРАТОР РЕАКТОРА ИС
dCi
V
G( C0 Ci ) V qi
базовая система
dt
уравнений
dT
V CP
G C P ( T0 T ) V qT
dt
i
i
dCi
V
G( C0i Ci ) V k Cini Fm K m ( Ci* Ci ) (22)
dt
dT
V CP
G C p (T0 T ) V Qr FT K T (T * T ) (23)
dt
Полагаем, что G, V, и Ср - const
149.
ПОЛНЫЙ ФУНКЦИОНАЛЬНЫЙ ОПЕРАТОР ИС ДЛЯСТАЦИОНАРНЫХ УСЛОВИЙ
Система стационарна, если ее
параметры не изменяются во
времени: С0i (t) или Т0(t) = const.
dC dT
0
dt dt
- условие
стационарности
150.
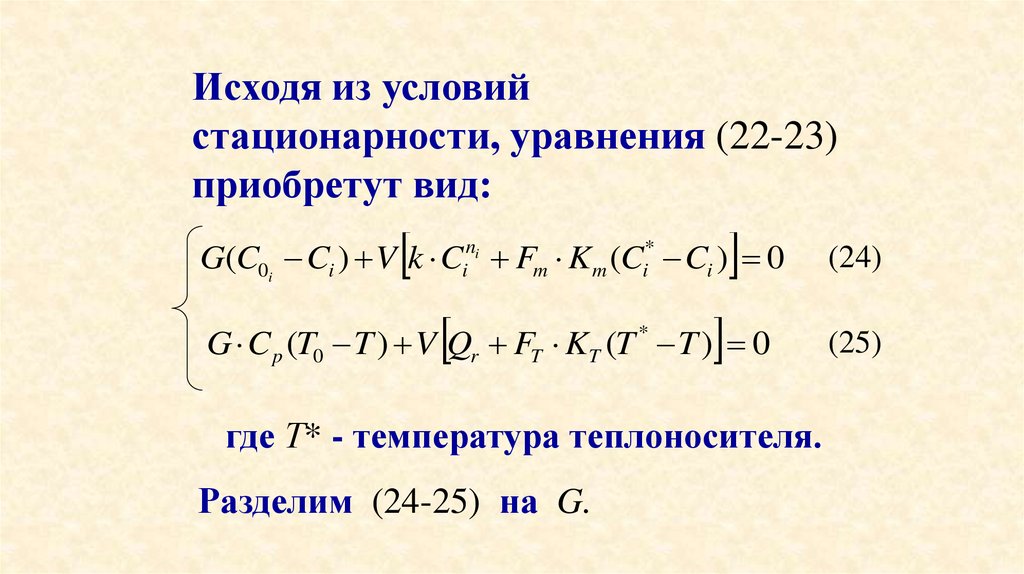
Исходя из условийстационарности, уравнения (22-23)
приобретут вид:
G(C0i Ci ) V k C Fm Km (C Ci ) 0
ni
i
*
i
G C p (T0 T ) V Qr FT KT (T T ) 0
*
где Т* - температура теплоносителя.
Разделим (24-25) на G.
(24)
(25)
151.
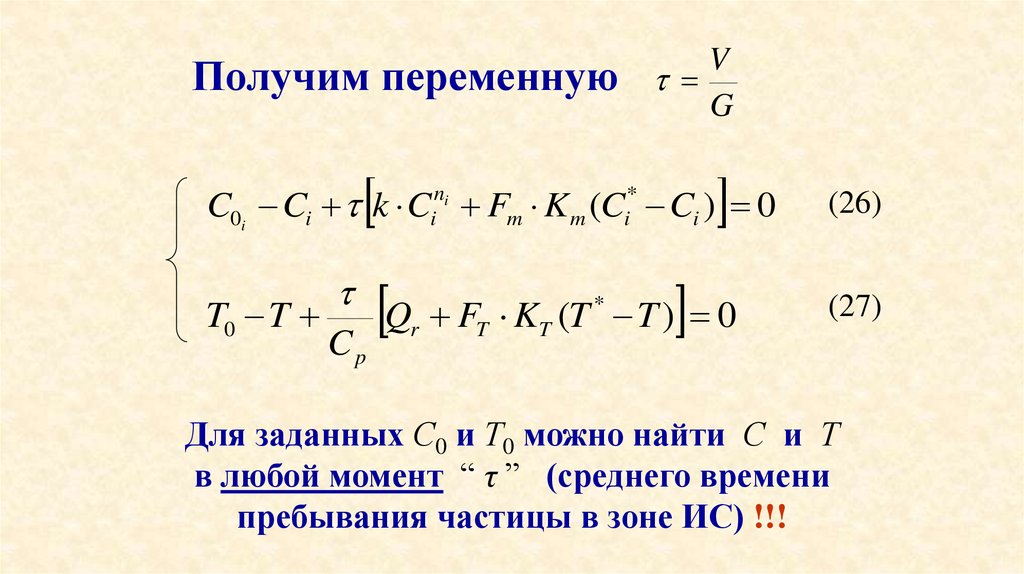
Получим переменнуюV
G
(26)
Q F K (T T ) 0
C
(27)
C0i Ci k Cini Fm K m (Ci* Ci ) 0
T0 T
*
r
T
T
p
Для заданных С0 и Т0 можно найти С и Т
в любой момент “ τ ” (среднего времени
пребывания частицы в зоне ИС) !!!
152.
kA
B
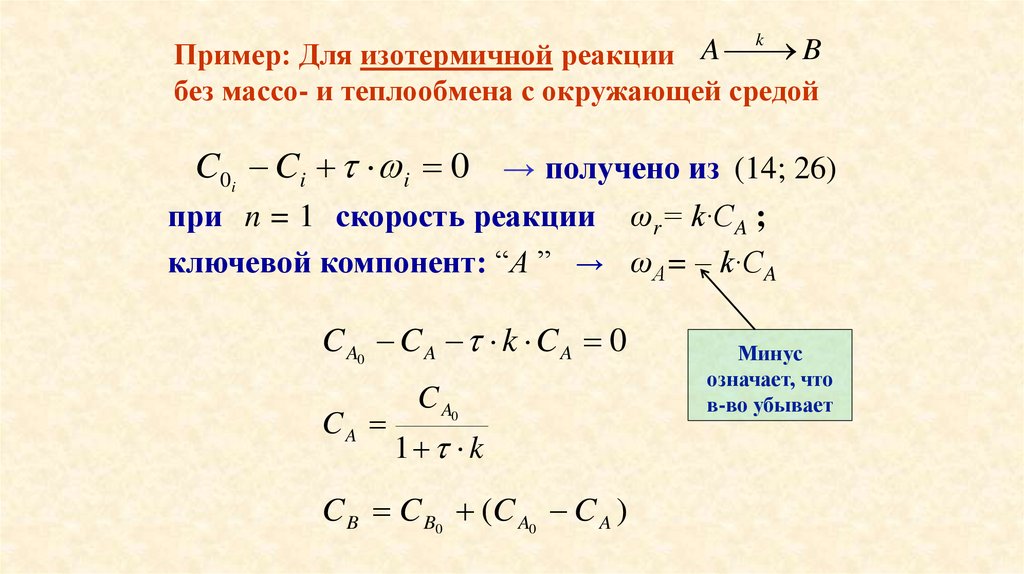
Пример: Для изотермичной реакции
без массо- и теплообмена с окружающей средой
C0i Ci i 0 → получено из (14; 26)
при n = 1 скорость реакции ωr= k·CA ;
ключевой компонент: “А ” → ωА= – k·CA
C A0 C A k C A 0
CA
C A0
1 k
C B C B0 (C A0 C A )
Минус
означает, что
в-во убывает
153.
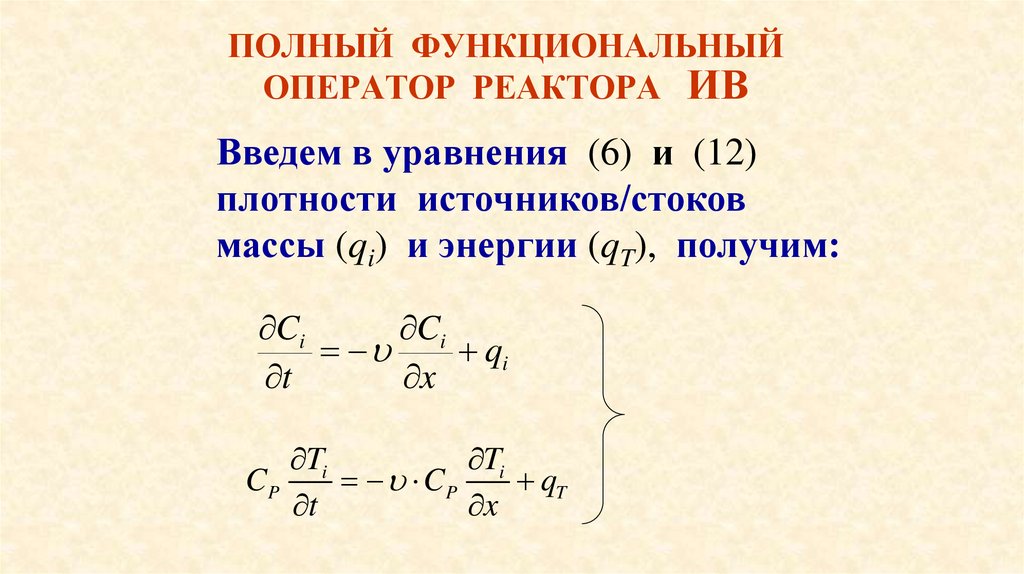
ПОЛНЫЙ ФУНКЦИОНАЛЬНЫЙОПЕРАТОР РЕАКТОРА ИВ
Введем в уравнения (6) и (12)
плотности источников/стоков
массы (qi) и энергии (qT), получим:
Ci
Ci
qi
t
x
Ti
Ti
CP
CP
qT
t
x
154.
Для стационарных условий,неизменного V , а также υ = const:
dC
υ
i Fm K m (C C * )
dx
(28)
dT
υ Cp
Qr KT Fm (T Tx )
dx
(29)
155.
Введем новую переменную (τ) – времяпрохождения элементарного объема по длине
аппарата x , получим ур-я (30-31).
dC
*
i Fm K m (C C )
d
(30)
dT Qr KT F
(T Tx )
d C p
Cp
(31)
156.
Пример: для изотермичной реакции (n = 1)k1
k2
без тепло- и массообмена: A B S
Ключевые компоненты: “А ” и “ В ”
A k1 C A
B k1 C A k 2 C B
dC A
k1 C A
d
dC B
k1 C A k 2 C B
d
157.
Интегрирование при СА|τ = 0 = C A0СА|х = 0 = C A ;
СВ|τ = 0 = 0;
СS|τ = 0 = 0;
С S |х = 0 = 0 .
0
C A C A0 e
СВ|х = 0 = 0;
k1
k1
k1
k 2
CB C A0
e e
k 2 k1
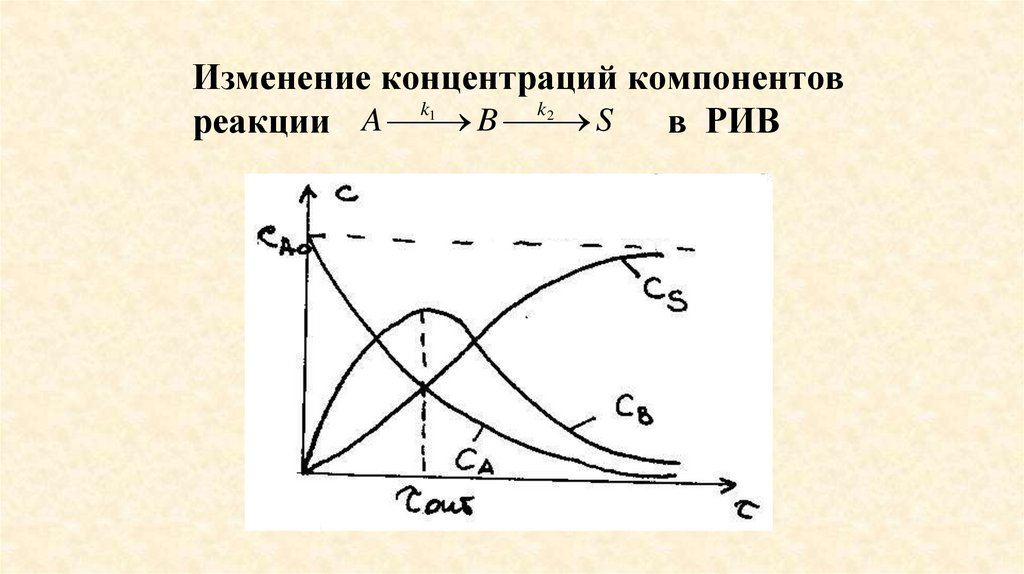
158.
Изменение концентраций компонентовk
k
A
B
S
реакции
в РИВ
1
2
159.
Статистические методымоделирования ХТП
Наличие достаточной
информации о механизме
процессов, протекающих в
системе, позволяет построить
детерминированные модели,
рассмотренные нами ранее.
160.
Идея статистическогомоделирования построена на
ПОСТУЛАТЕ:
«Оптимальное управление
объектом возможно при неполной
информации о системе» !!!
Обратимся к «черному ящику».
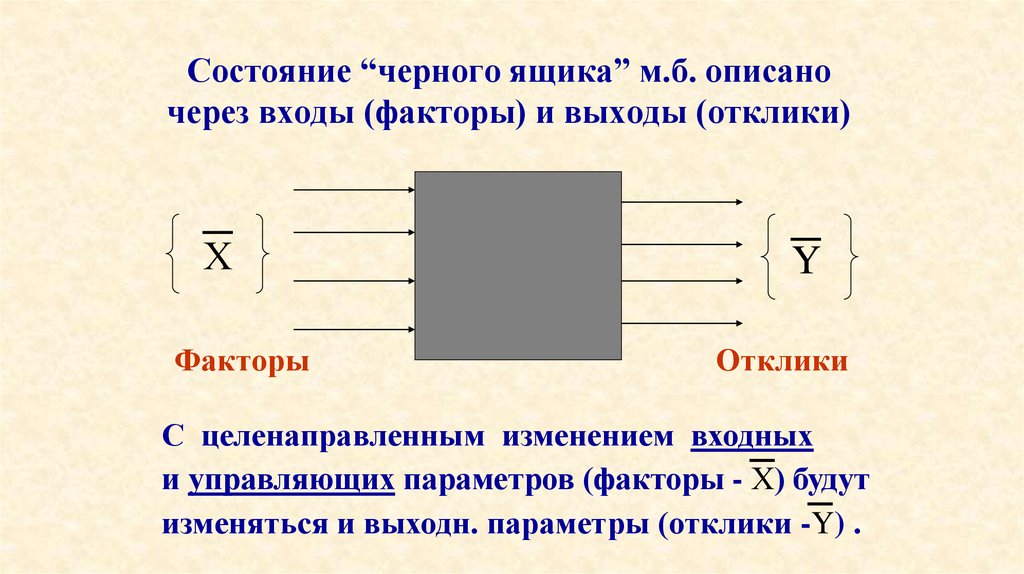
161.
Состояние “черного ящика” м.б. описаночерез входы (факторы) и выходы (отклики)
Х
Факторы
Y
Отклики
С целенаправленным изменением входных
и управляющих параметров (факторы - Х) будут
изменяться и выходн. параметры (отклики -Y) .
162.
Для построения ММ находитсяэмпирическая зависимость между
переменными входа (X) и выхода (Y)
y F x
(32)
Уравнение (32) получают методами
математической статистики.
163.
ФАКТОР- входная переменная, определяющая
состояние объекта в данный момент
времени.
Факторы
качественные
количественные
164.
ТРЕБОВАНИЯ К ФАКТОРАМ:1 Управляемость воле экспериментатора.
2 Однозначность.
3 Операционность – последовательность
операций, устанавливающих его
конкретное значение.
4 Точность замера значений.
От удачного выбора факторов зависит
успех моделирования !!!
165.
ТРЕБОВАНИЯ К СОВОКУПНОСТИФАКТОРОВ:
1 Совместимость.
2 Независимость – отсутствие линейной
корреляции.
3 Существование области определения.
166.
Отклик- выходная переменная,
описывающая состояние объекта
в данный момент времени.
167.
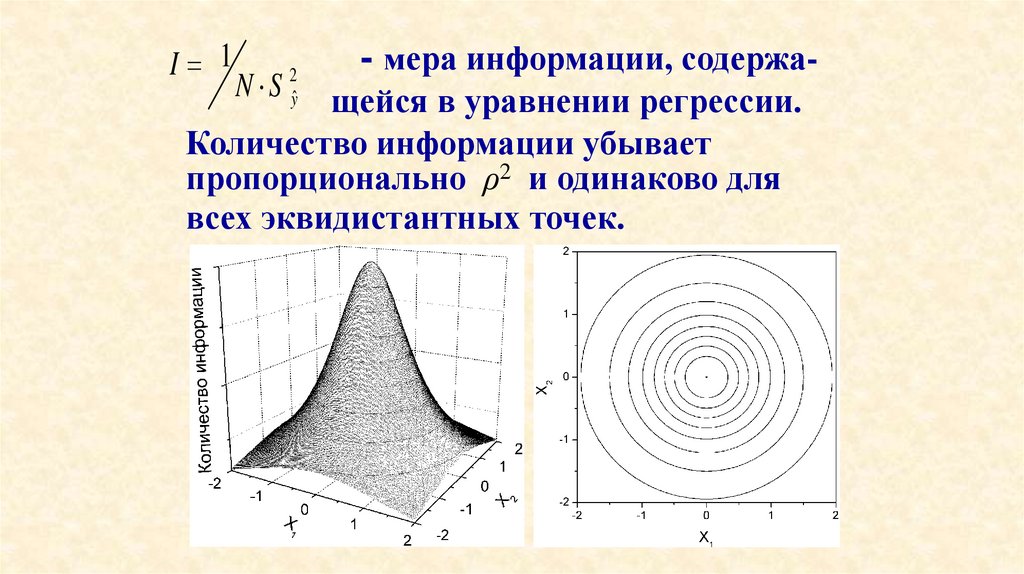
168.
Геометрическое изображениефункции отклика в факторном
пространстве называют
поверхностью отклика
ТРЕБОВАНИЯ К ПОВЕРХНОСТИ ОТКЛИКА:
1 - непрерывность;
2 - монотонность;
3 - наличие оптимума, хотя бы на границах
области определения.
169.
170.
Статистическими методаминайдем оценку неизвестных
коэффициентов βj отрезка
ряда Тейлора (34) .
Для этого поставим
эксперименты на реальном
объекте.
171.
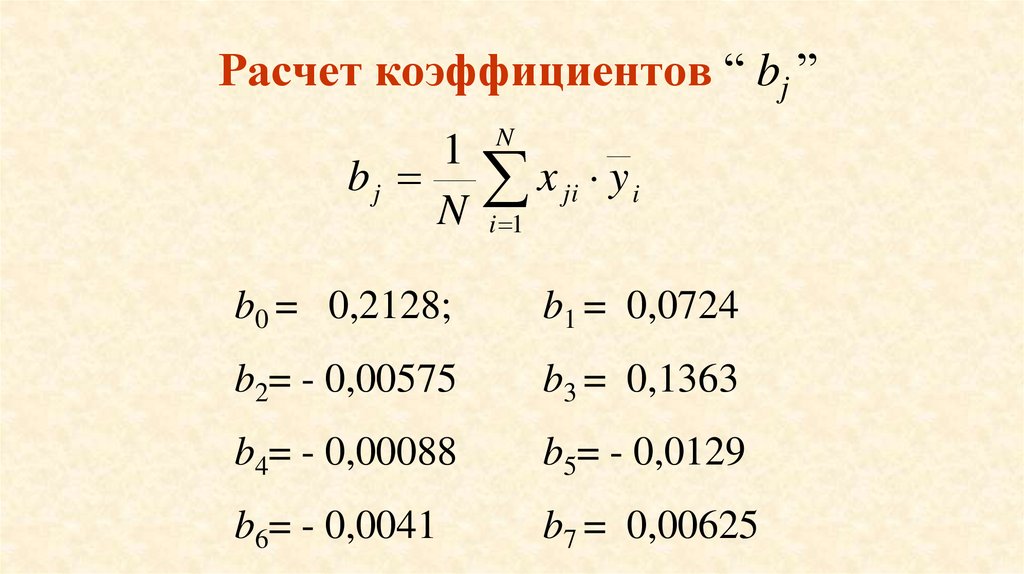
172.
Выборочные коэффициенты bjявляются статистической оценкой
теоретических коэффициентов βj .
По ним нельзя восстановить исходную
функцию (33), аналитическое значение
которой остается неизвестной.
Следовательно, невозможно получить
информацию о механизме процесса.
Полиномиальная модель справедлива
только для объекта, на котором
проводится эксперимент !!!
173.
Моделирование ХТП.Пассивный и активный эксперимент
Эффективность экспериментов во
многом зависит от методов их
проведения. Различают активный и
пассивный эксперименты.
Обработку результатов в обоих
случаях проводят методами
мат.статистики.
174.
Пассивный эксперимент (ПЭ):- это большая серия опытов с
поочередным варьированием каждой из
переменных. Другие переменные
остаются при этом постоянными.
Недостаток: трудоемкость, большое
число опытов (при k > 3 практически
бесполезен).
175.
АКТИВНЫЙ ЭКСПЕРИМЕНТ (АЭ)(ПЛАНИРОВАНИЕ ЭКСПЕРИМЕНТА):
- это целенаправленное, одновременное
изменение всех варьируемых факторов
в соответствии с разработанным
планом эксперимента.
Достоинство: эффекты (bj ), т.е. члены
уравнения регрессии (35) определяются
с большей точностью, чем в пассивном
эксперименте.
176.
Идея АЭ реализуется впроведении опытов по специальному
плану (одновременное варьирование
факторов) при min количестве опытов.
Цель - получить уравнение
регрессии (35) с оценкой его
адекватности и точности расчета
коэффциентов (bj) .
177.
Развитие концепциипланирования эксперимента
связано с работами английского
статистика Роналда Фишера.
В концепции Фишера главная цель
планирования эксперимента
заключается в раздельной оценке
эффектов (bj) в многофакторной
ситуации.
178.
Ronald Fisher in 1956Сэр Рональд Фишер (18901962) родился и жил в
Англии. Большую часть
своей жизни он оставался
приверженцем евгеники.
Более всего известен своими
трудами в области
математической статистики.
Внес большой вклад в
развитие эволюционной
генетики. Его первая книга
"Генетическая теория и
естественный отбор" (1930)
посвящена синтезу
дарвиновской теории отбора
и генетики. Фишер внес
большой теоретический и
практический вклад в
генетику. Он выдвинул
концепцию прогрессивного
отбора и инбридинга,
попытался унифицировать
учение об эволюции.
179.
В России применение иразвитие идей и методов
планирования эксперимента
связано с работами
В.В. Налимова и учеников
его научной школы.
180.
181.
НАЛИМОВ Василий ВасильевичРодился в Москве в 1910 г. (мать – врач,
отец – этнограф, профессор Московского
университета).
1936 ÷ 1954 гг. – сталинские тюрьмы и
лагеря (Колыма), ссылка (Казахстан).
С 1965 г. работал в МГУ, д.т.н., профессор.
Область научных интересов:
математическая статистика, разработка
вероятностной модели языка, наукометрия,
философия науки, философия человека.
182.
ПОЛНЫЙ ФАКТОРНЫЙЭКСПЕРИМЕНТ (ПФЭ)
- это реализация всех возможных
комбинаций факторов (k)
на всех выбранных для
исследования уровнях (n) .
Она обеспечивает условия
одновременного варьирования
факторов в идее АЭ.
183.
Необходимое число опытов (N)при ПФЭ равно: N = n k
n - количество выбранных
уровней;
k - число факторов.
184.
Благодаря особому (оптимальному)расположению точек плана ПФЭ
в факторном пространстве
и линейному преобразованию
координат удается устранить
линейную корреляцию между
коэффициентами уравнения
регрессии (эффектами).
185.
186.
Преимущество планов ПФЭтипа 2k перед планами типа 3k
заключается в меньшем числе
опытов.
При k = 3; N = 8 для
двухуровневых планов.
При k = 3; N = 27 для
трехуровневых планов.
187.
Двухуровневые планы ПФЭ типа 2kПример: изучается влияние на выход
продукции влияние трех факторов (Z):
• температуры (Z1) в диапазоне
100 ÷ 200 0С;
• давления (Z2) в диапазоне (2 ÷ 6)·105 Па;
• времени проведения процесса (Z3)
в диапазоне 10 ÷ 20 мин.
Выбираем план типа ПФЭ 23
188.
Шаг 1. Находим центр плана (ЦП) иинтервалы варьирования факторов
Z
0
j
Z
Z j
max
j
Z
min
j
2
Z
max
j
Z
2
min
j
центр плана
интервал
варьирования
189.
Уровни варьирования факторов –обычно это границы исследуемой
области по конкретному
технологическому параметру.
Удачный выбор интервалов
варьирования и центра плана
определяет успех решения задачи
оптимизации.
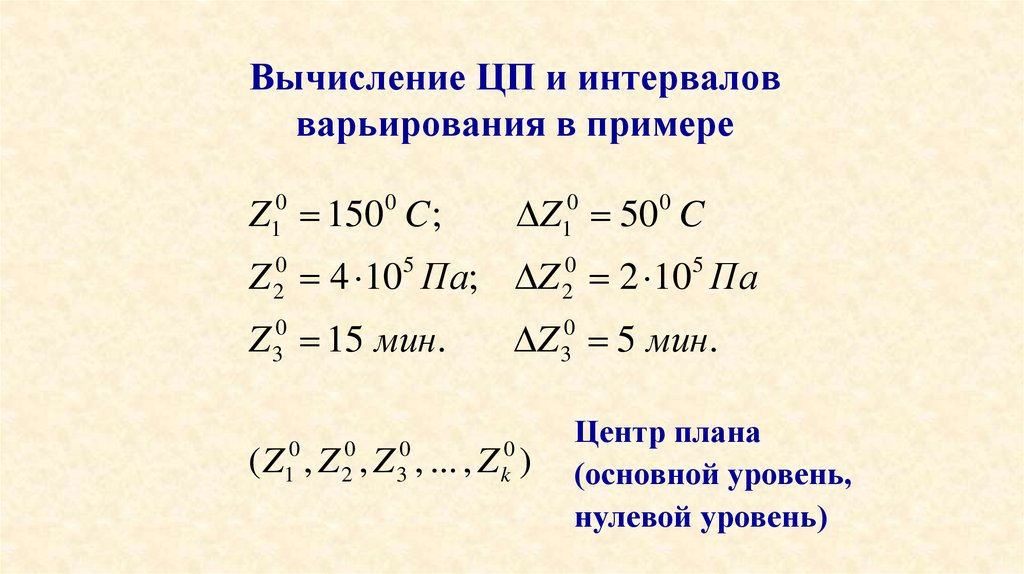
190.
Вычисление ЦП и интерваловварьирования в примере
Z 150 C ;
0
1
Z 50 C
0
0
1
0
Z 4 10 Па; Z 2 10 Па
0
2
5
Z 15 мин.
0
3
0
1
0
2
0
3
0
2
5
Z 5 мин.
0
3
0
k
( Z , Z , Z , ... , Z )
Центр плана
(основной уровень,
нулевой уровень)
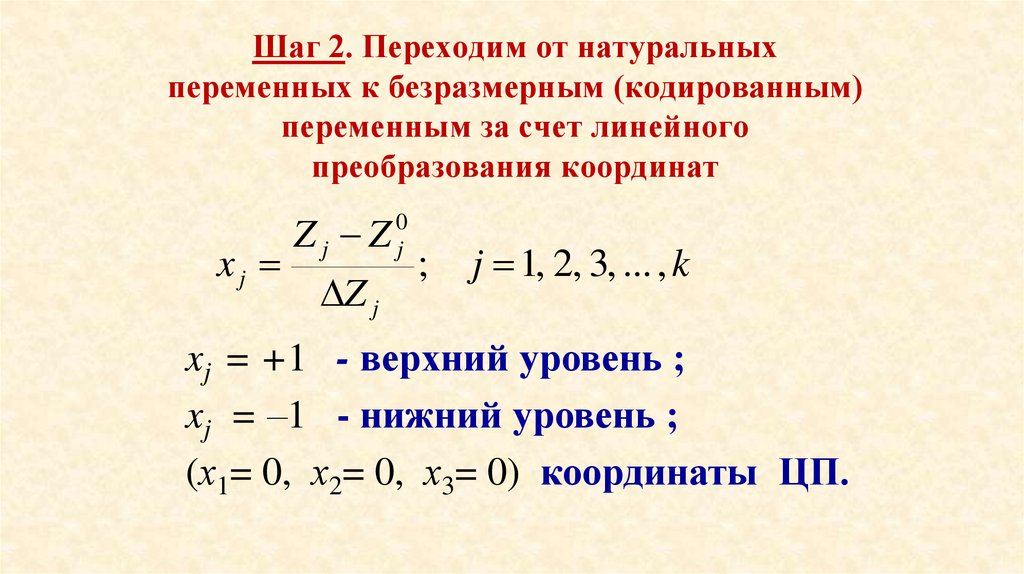
191.
Шаг 2. Переходим от натуральныхпеременных к безразмерным (кодированным)
переменным за счет линейного
преобразования координат
xj
Zj Z
Z j
0
j
;
j 1, 2, 3, ... , k
xj = +1 - верхний уровень ;
xj = –1 - нижний уровень ;
(х1= 0, х2= 0, х3= 0) координаты ЦП.
192.
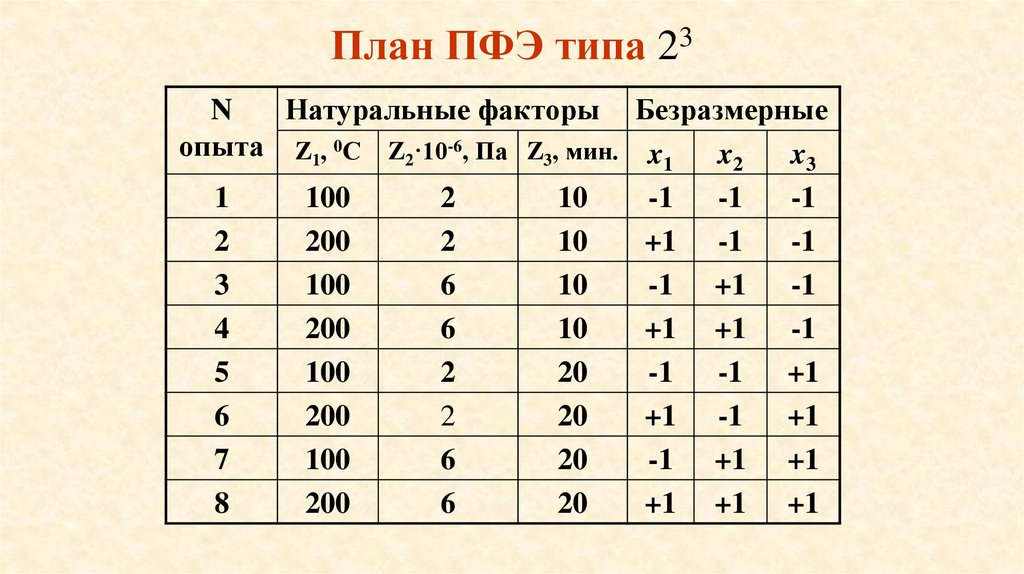
План ПФЭ типа 23N
Натуральные факторы Безразмерные
опыта Z1, 0С Z2·10-6, Па Z3, мин. x
x
x
1
2
3
4
5
6
7
8
100
200
100
200
100
200
100
200
2
2
6
6
2
2
6
6
10
10
10
10
20
20
20
20
1
2
3
-1
+1
-1
+1
-1
+1
-1
+1
-1
-1
+1
+1
-1
-1
+1
+1
-1
-1
-1
-1
+1
+1
+1
+1
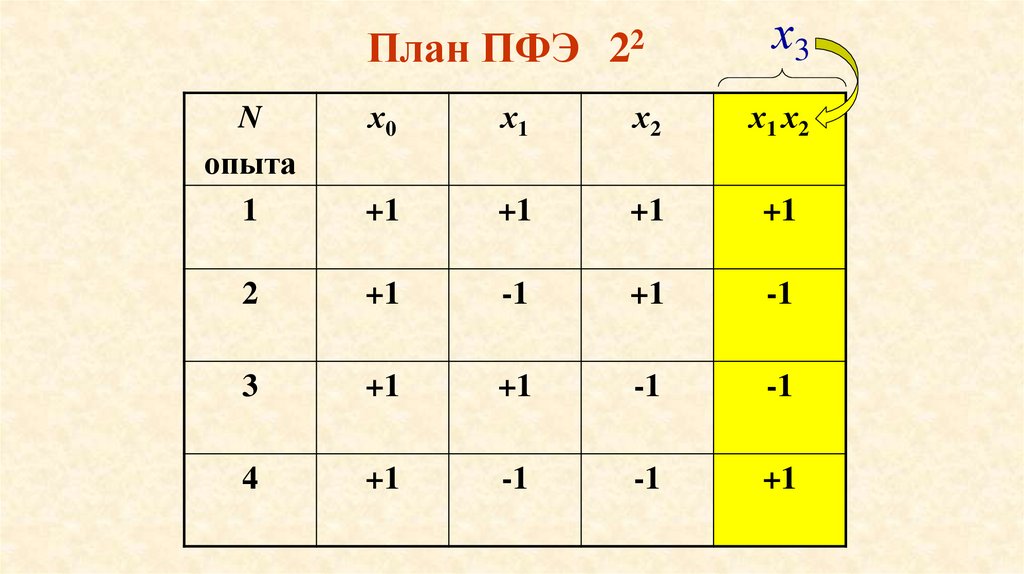
193.
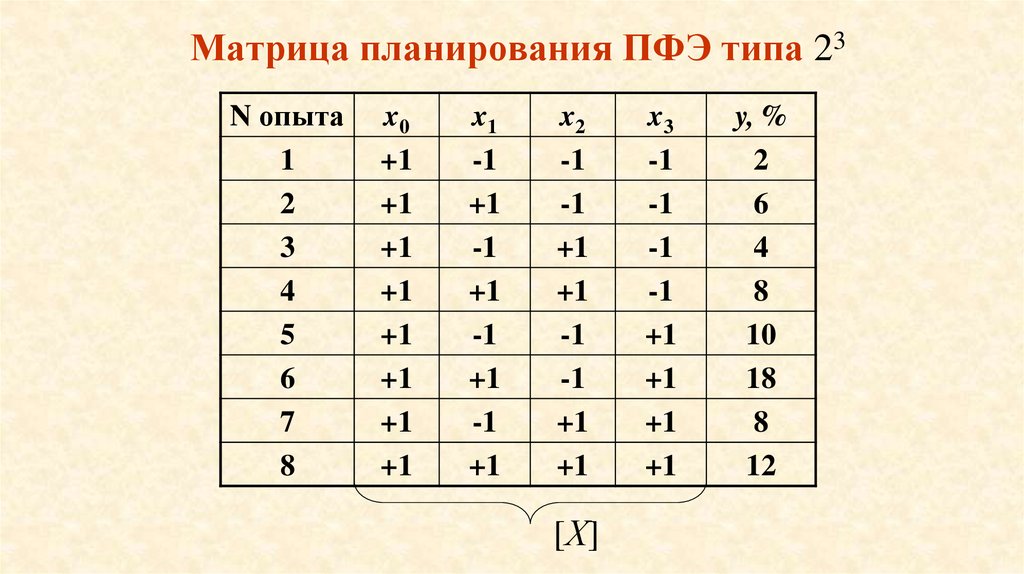
Шаг 3. Составляем матрицу планированияПФЭ типа 23. Проводим опыты
N опыта
1
2
3
4
5
6
7
8
x0
+1
+1
+1
+1
+1
+1
+1
+1
x1
-1
+1
-1
+1
-1
+1
-1
+1
x2
-1
-1
+1
+1
-1
-1
+1
+1
[Х]
x3
-1
-1
-1
-1
+1
+1
+1
+1
y, %
2
6
4
8
10
18
8
12
194.
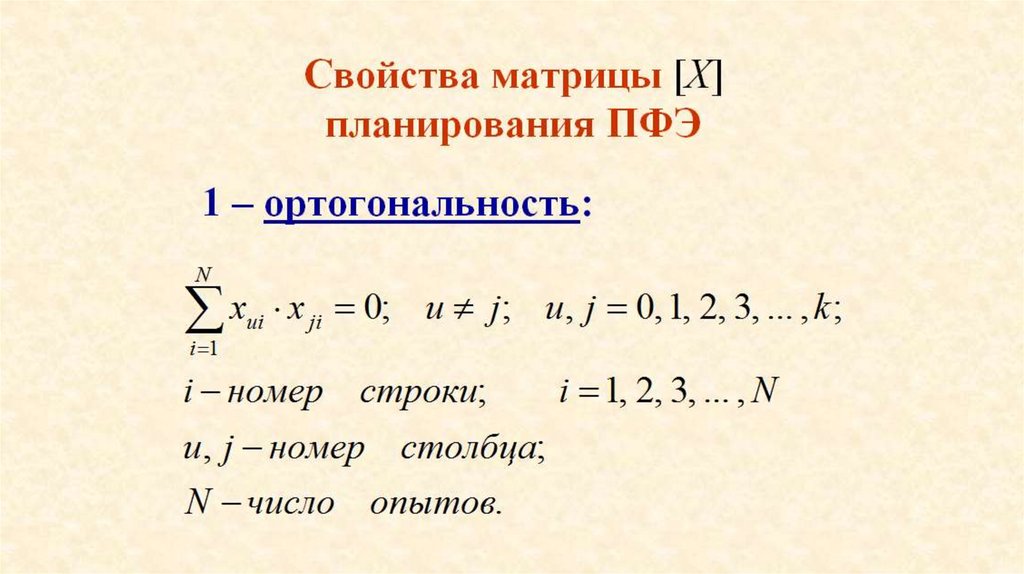
195.
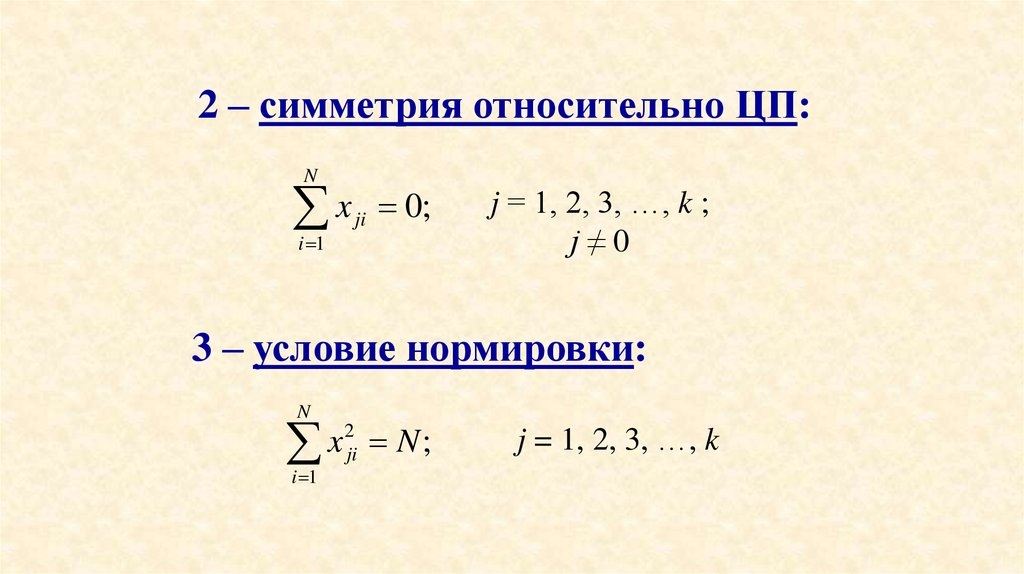
2 – симметрия относительно ЦП:N
x 0;
i 1
ji
j = 1, 2, 3, …, k ;
j≠0
3 – условие нормировки:
N
2
x
ji N ;
i 1
j = 1, 2, 3, …, k
196.
197.
198.
199.
200.
Вычисление коэффициентов1
B X Y
Неверно !!!
X X B X Y
T
T
1
B ( X X ) X Y
T
T
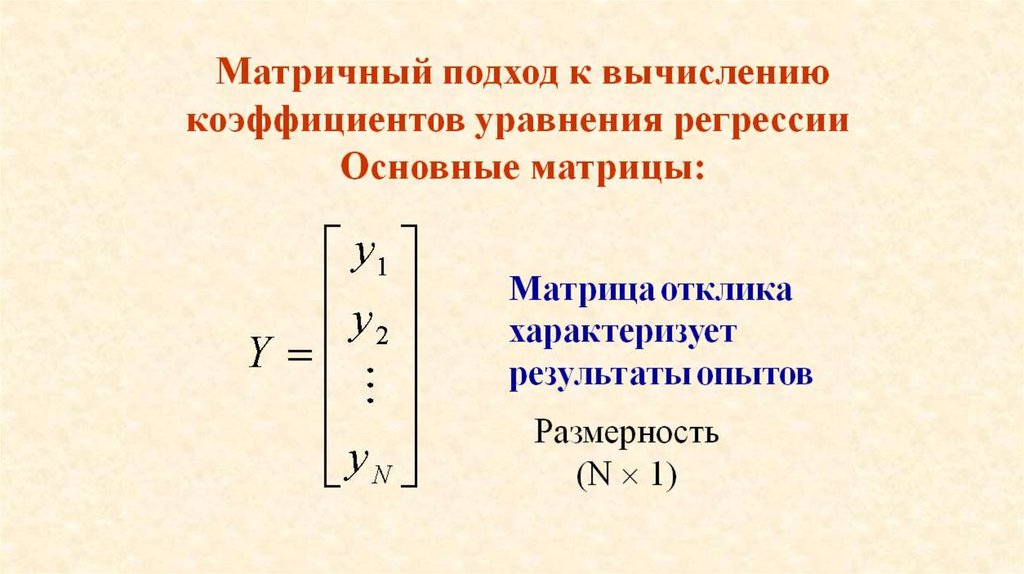
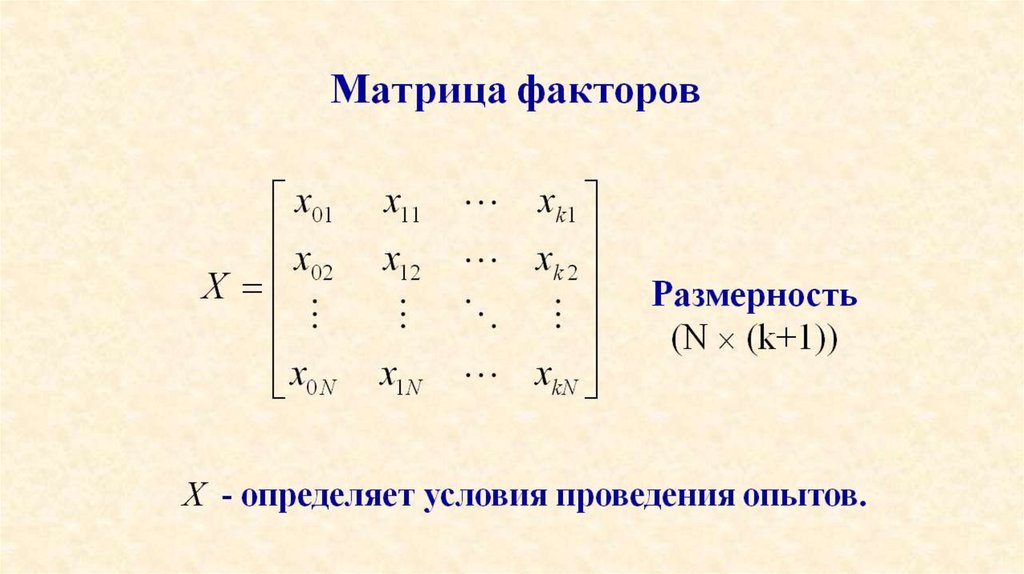
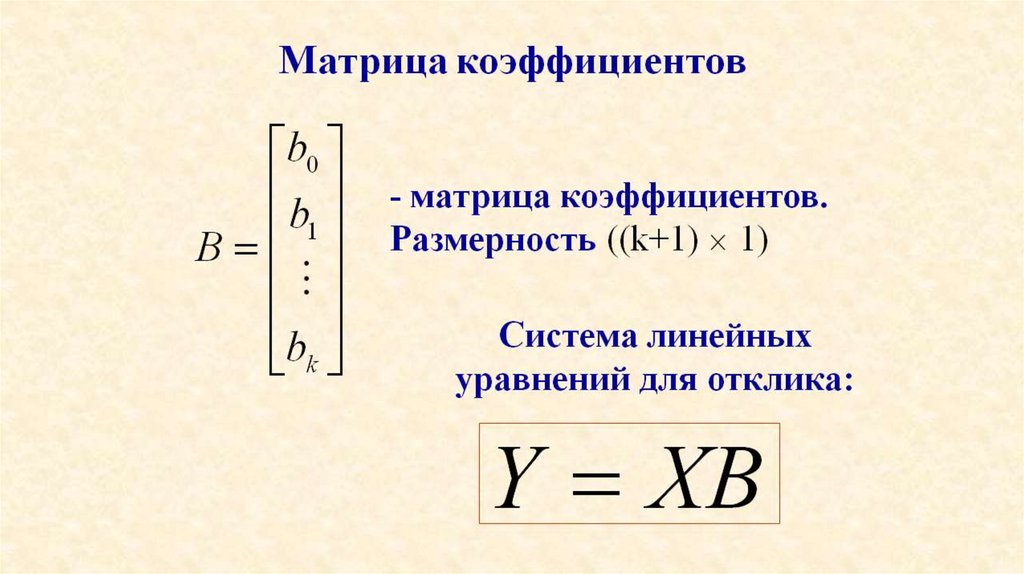
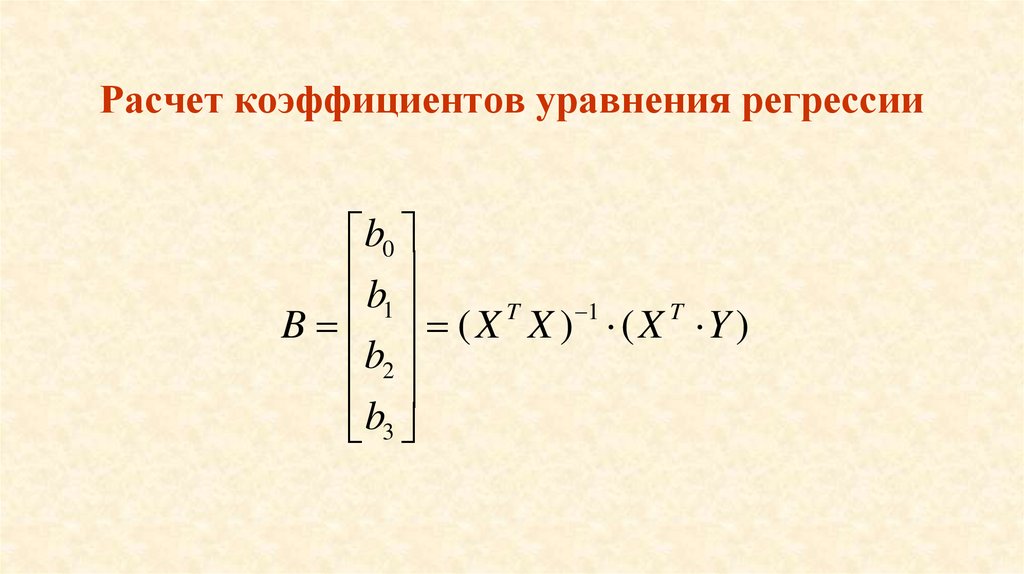
201.
Матричный подход к вычислениюкоэффициентов уравнения
регрессии
1
B ( X X ) X Y
T
T
Рассмотрим матрицы этого
произведения
202.
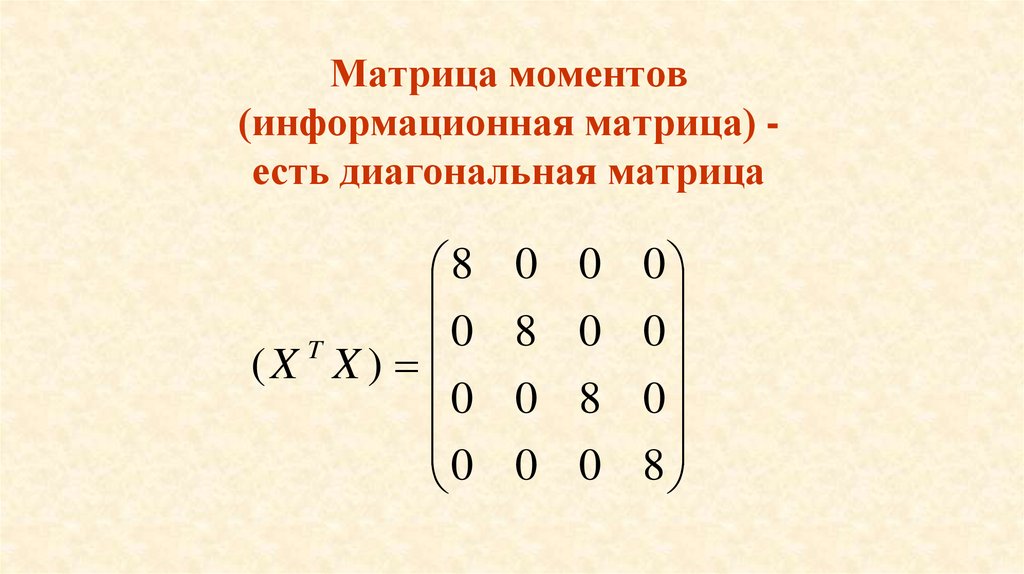
Матрица моментов(информационная матрица)
T
(X X )
[Х] – матрица планирования ПФЭ (8×4)
[ХТ] – транспонированная матрица (4×8)
Умножение матриц определяется правилом
“строка на столбец”
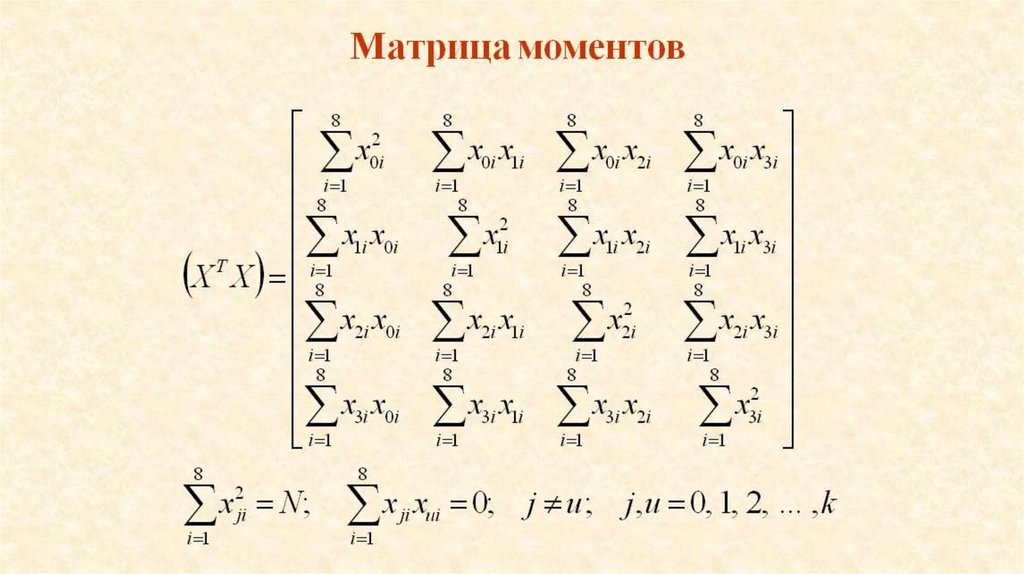
203.
204.
205.
Матрица моментов(информационная матрица) есть диагональная матрица
8
0
T
(X X )
0
0
0
8
0
0
0
0
8
0
0
0
0
8
206.
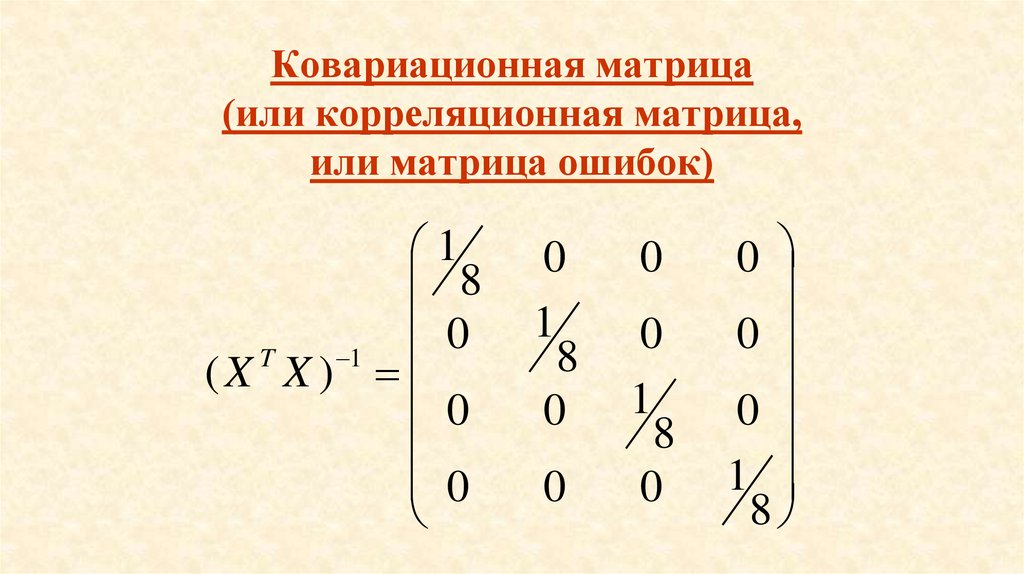
Ковариационная матрица(или корреляционная матрица,
или матрица ошибок)
1
8
0
T
1
(X X )
0
0
0
1
8
0
0
0
0
1
8
0
0
0
0
1
8
207.
ПРАВИЛО:Матрица обратная диагональной
является также диагональной,
причем элементы, лежащие на её
диагонали равны обратным
величинам соответствующих
элементов прямой матрицы.
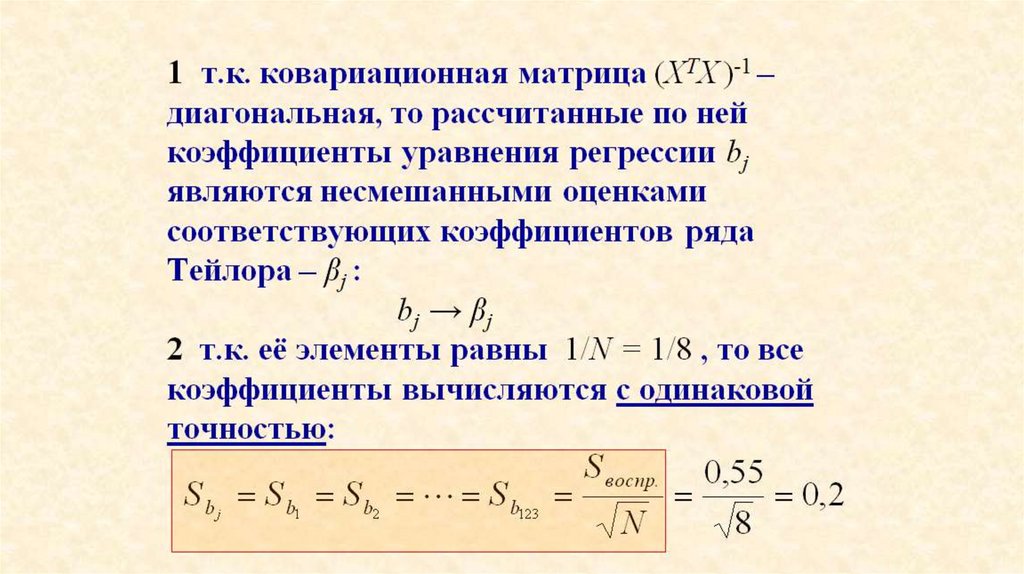
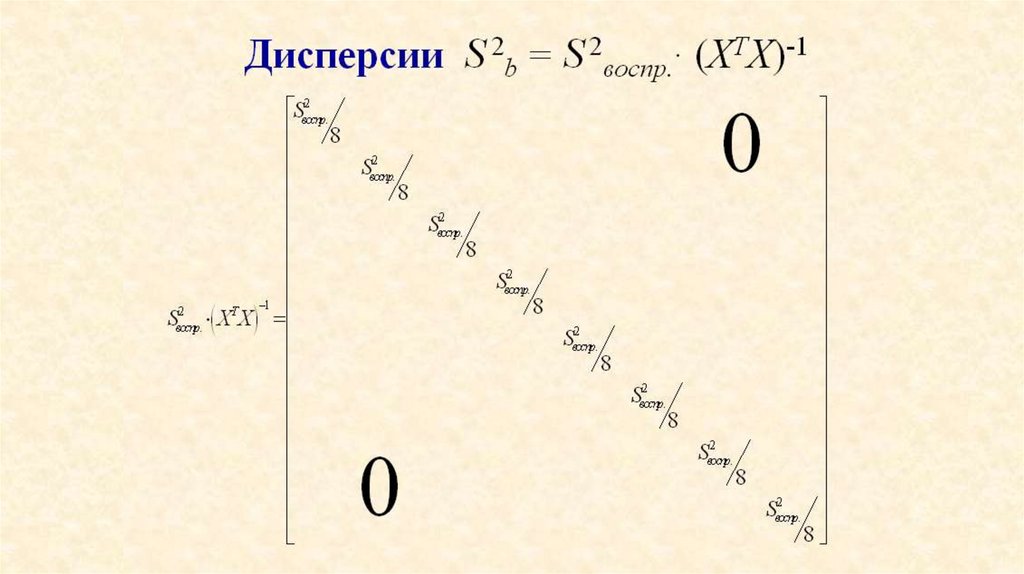
208.
Диагональные элементы матрицы[X TX]-1 определяют дисперсии σ2b
коэффициентов регрессии, а
недиагональные - характеризуют
статистическую зависимость между
коэффициентами bj
(ковариацию cov{ bubj }.
Если недиагональные элементы
равны нулю, то линейная корреляция
между коэффициентами bj отсутствует !
209.
Расчет коэффициентов уравнения регрессииb0
b
1
T
1
T
B
( X X ) ( X Y )
b2
b3
210.
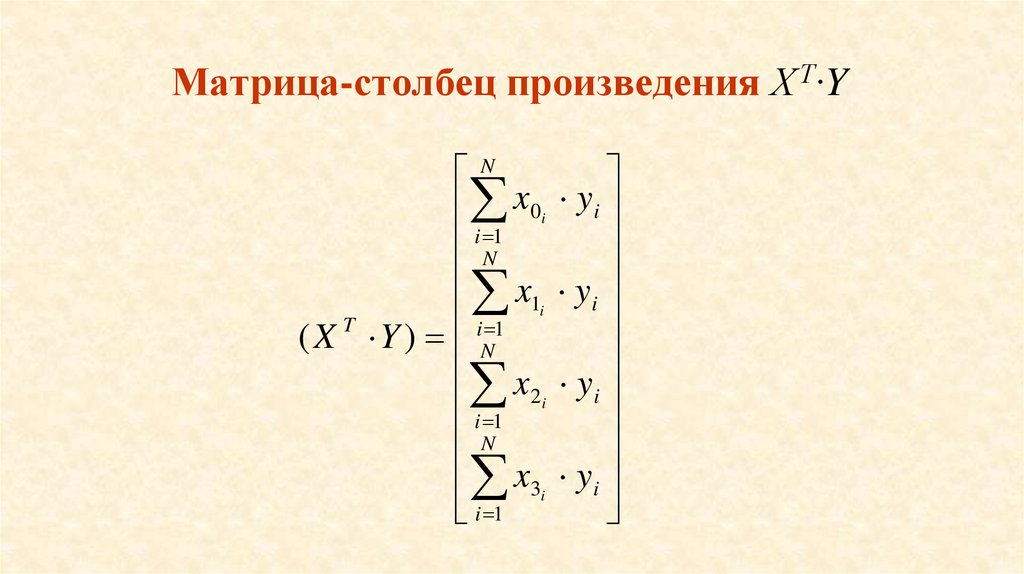
Матрица-столбец произведения Х Т·Yx 0i y i
i N1
x y
1i
i
i 1
T
(X Y ) N
x 2i y i
i 1
N
x3i y i
i 1
N
211.
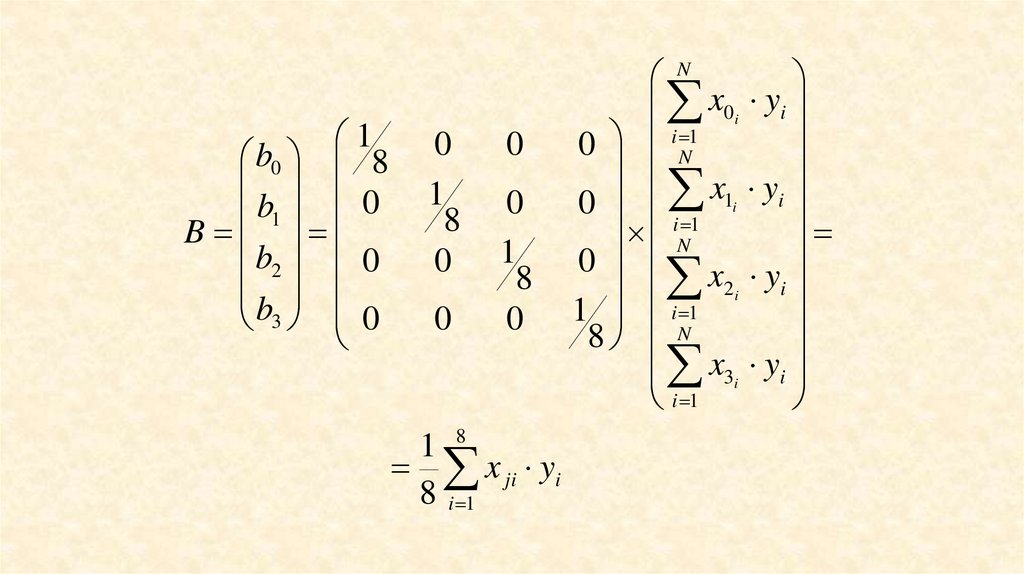
1b0 8
b1 0
B
b2
0
b
3 0
0
1
8
0
0
8
0
0
1
8
0
1
x ji yi
8 i 1
N
x0i yi
0 i N1
x
y
1
i
i
0
iN 1
0 x y
2i i
1 i 1
8 N
x3i yi
i 1
212.
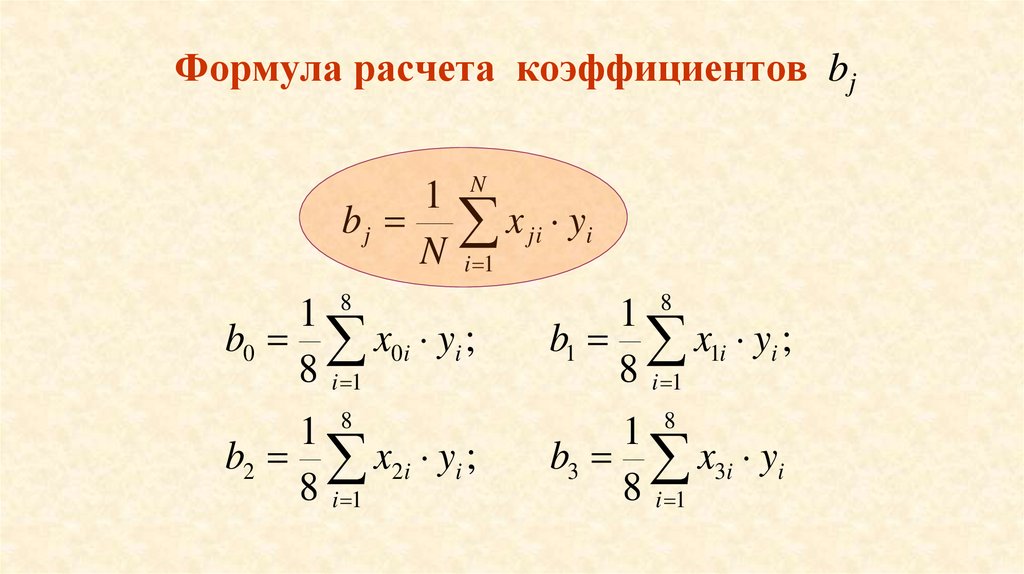
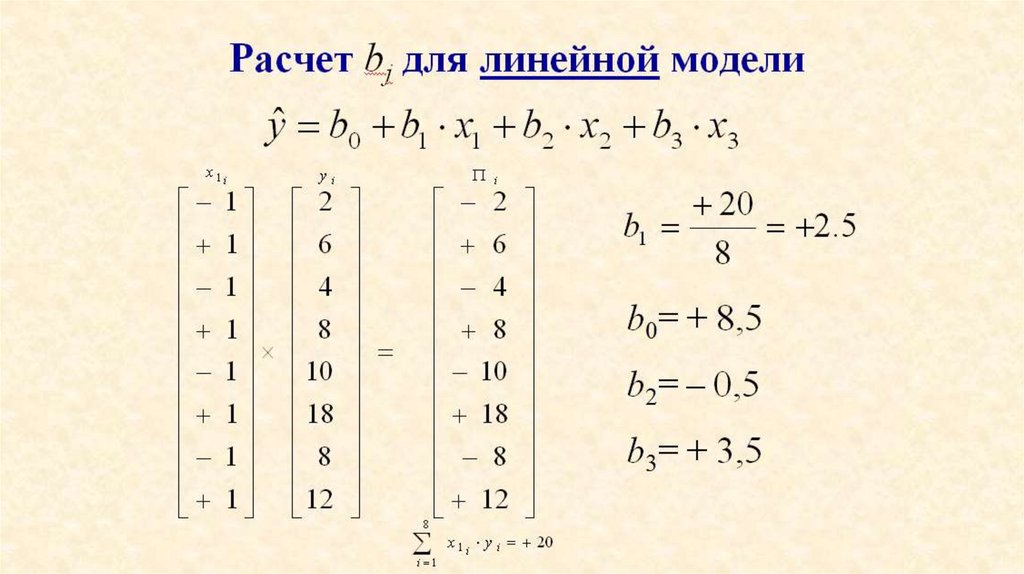
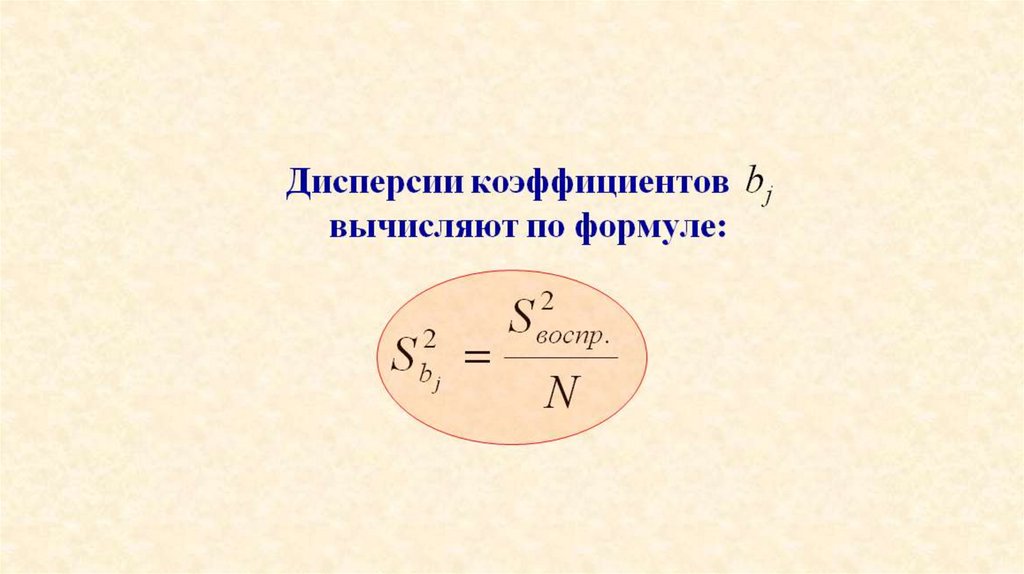
Формула расчета коэффициентов bj1 N
b j x ji yi
N i 1
8
1
b0 x0i yi ;
8 i 1
1
b1 x1i yi ;
8 i 1
8
8
1
b2 x2i yi ;
8 i 1
8
1
b3 x3i yi
8 i 1
213.
Матрица планирования ПФЭ типа 23N опыта
1
2
3
4
5
6
7
8
x0
+1
+1
+1
+1
+1
+1
+1
+1
x1
-1
+1
-1
+1
-1
+1
-1
+1
x2
-1
-1
+1
+1
-1
-1
+1
+1
[Х]
x3
-1
-1
-1
-1
+1
+1
+1
+1
y, %
2
6
4
8
10
18
8
12
214.
215.
216.
Вопрос: Назовите свойства матрицыпланирования [Х]
N опыта
1
2
3
4
5
6
7
8
x0
+1
+1
+1
+1
+1
+1
+1
+1
x1
-1
+1
-1
+1
-1
+1
-1
+1
x2
-1
-1
+1
+1
-1
-1
+1
+1
[Х]
x3
-1
-1
-1
-1
+1
+1
+1
+1
y, %
2
6
4
8
10
18
8
12
217.
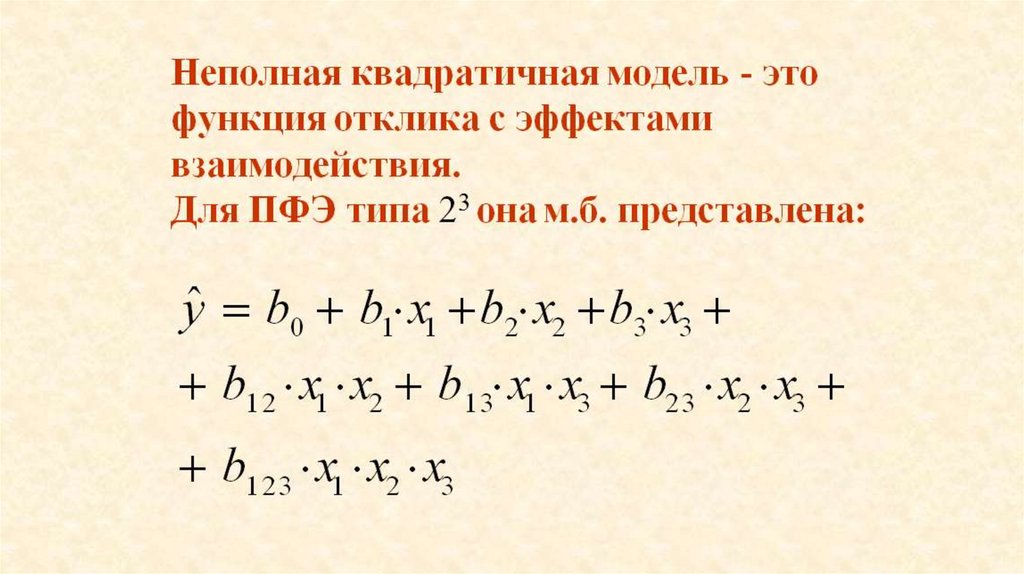
ПОСТРОЕНИЕ НЕПОЛНОЙКВАДРАТИЧНОЙ МОДЕЛИ
(НЕЛИНЕЙНОЙ МОДЕЛИ) ПРИ
ПОМОЩИ ДВУХУРОВНЕВЫХ
ПЛАНОВ ПФЭ ТИПА 2k .
218.
219.
Расширенная матрица планирования ПФЭ 23N
x0
x1
x2
x3 x1x2 x1x3 x2x3 x1x2x3 yi
1
2
+1
+1
-1
+1
-1
-1
-1
-1
+1
-1
+1
-1
+1
+1
-1
+1
2
6
3
+1
-1
+1
-1
-1
+1
-1
+1
4
4
+1
+1
+1
-1
+1
-1
-1
-1
8
5
+1
-1
-1
+1
+1
-1
-1
+1
10
6
+1
+1
-1
+1
-1
+1
-1
-1
18
7
+1
-1
+1 +1
-1
-1
+1
-1
8
8
+1
+1
+1 +1
+1
+1
+1
+1
12
[Х]
220.
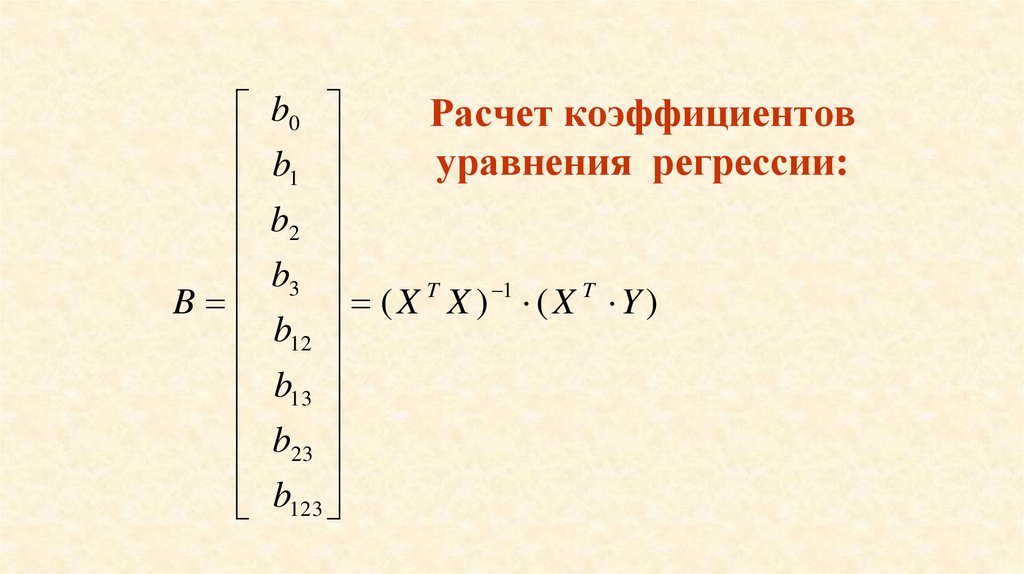
b0Расчет коэффициентов
b
уравнения
регрессии:
1
b2
b3
T
1
T
B
(X X ) (X Y )
b12
b13
b
23
b123
221.
8XTX
0
8
8
8
8
8
8
0
8
- матрица
моментов
1
8
1
XTX
ковариационная
матрица -
0
0
1
8
1
8
1
8
1
8
1
8
1
8
1
8
222.
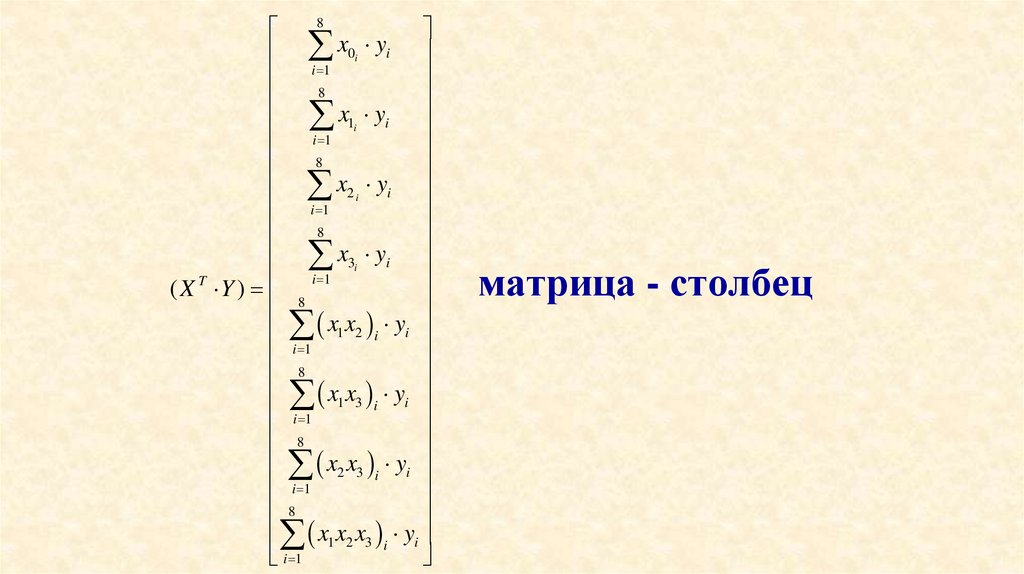
8x
y
0i i
i 1
8
x
y
1i i
i 1
8
x2 i yi
i 1
8
x3i yi
i 1
( X T Y ) 8
x1 x2 i yi
i 1
8
x1 x3 i yi
i 1
8
x2 x3 i yi
i 1
8
x1 x2 x3 i yi
i 1
матрица - столбец
223.
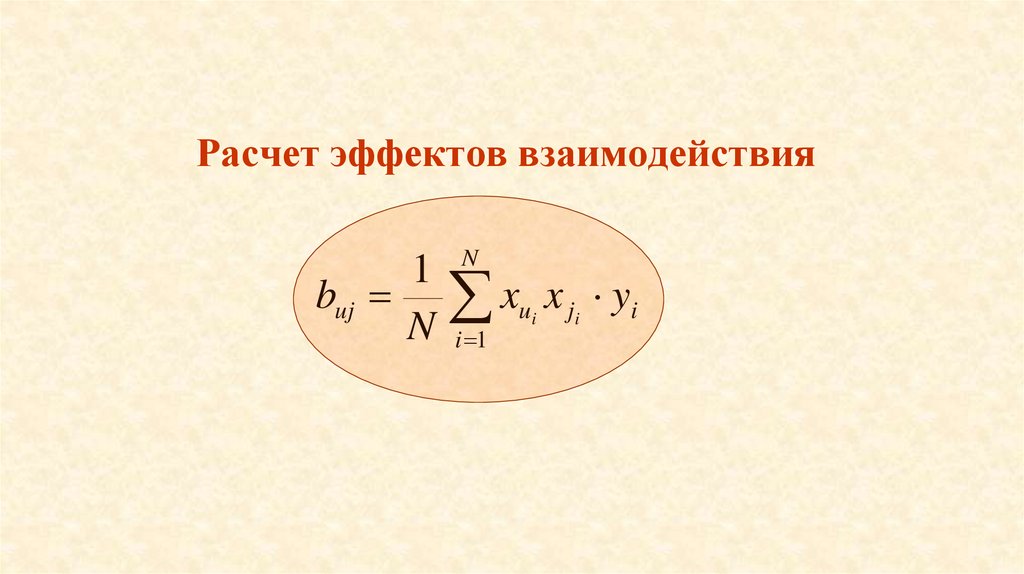
Расчет эффектов взаимодействияN
1
buj xui x ji yi
N i 1
224.
x1 x2i
yi
1 2
1 6
1 4
1 8
1 10
1 18
1 8
1 12
8
2
N
6
x1 x2 i yi 4
b i
0,5
12
4
N
8
8
10
b
=
+0,5
13
18
b
=
–1,5
23
8
b
=
+0,25
123
12
( x1 x2 )i yi 4
i 1
225.
226.
Знак при bj указывает нанаправление влияния факторов.
Если знак « + », то фактор (сочетание
факторов) увеличивает значение у ,
если « – », то уменьшает.
Численное значение коэффициента
bj указывает на силу влияния
факторов. Она пропорциональна
~ bj2 .
227.
Идентификация моделиПосле построения линейной
или неполной квадратичной модели
(нахождения коэффициентов bj)
необходимо провести идентификацию
ММ, т.е. проверить значимость
коэффициентов уравнения регрессии
(незначимые коэффициенты
исключают из уравнения).
228.
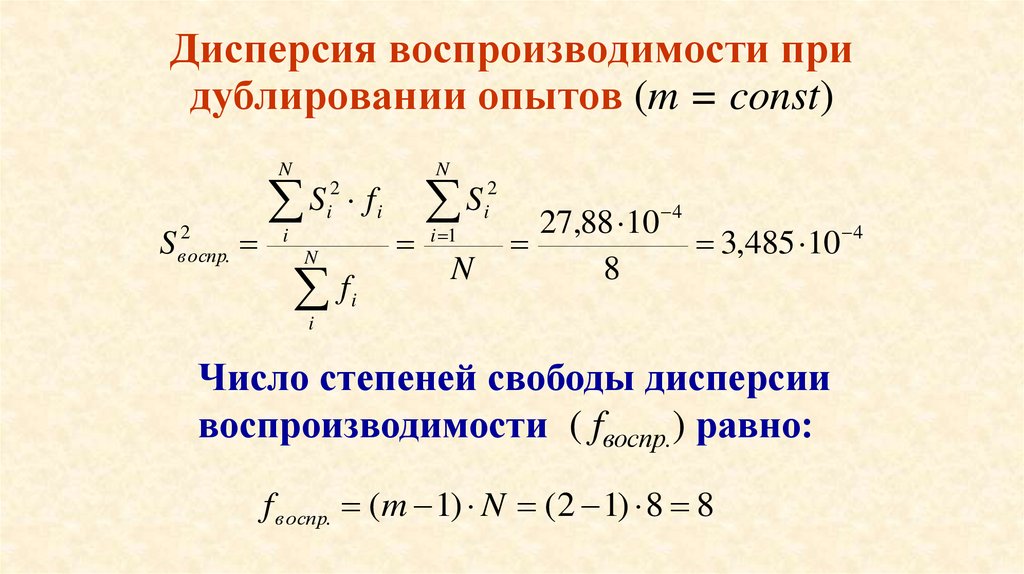
Для проверки значимостикоэффициентов уравнения регрессии
и его адекватности необходимо
найти дисперсию воспроизводимости.
Она м.б. найдена 2-мя способами:
а) постановкой дополнительных
опытов в ЦП;
б) или дублированием каждого опыта
m раз.
229.
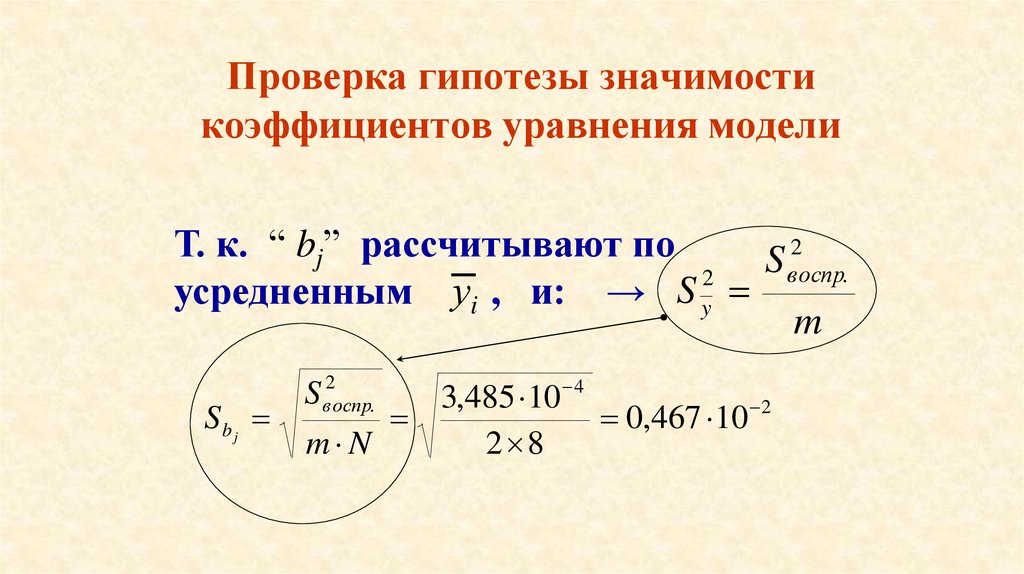
ПРОВЕРКА ЗНАЧИМОСТИКОЭФФИЦИЕНТОВ УРАВНЕНИЯ
Проверку ведут при помощи t -критерия
Стьюдента. Т.к. оценка “ bj ” есть
случайный результат эксперимента, то
Н 0 : βj = 0
Н 1 : βj ≠ 0
коэффициент незначим;
коэффициент значим.
Следовательно, используем двухсторонний t –критерий ( при q = 0,05 ) !!!
230.
Условие принятия Н0 :отбрасывания незначащих bj
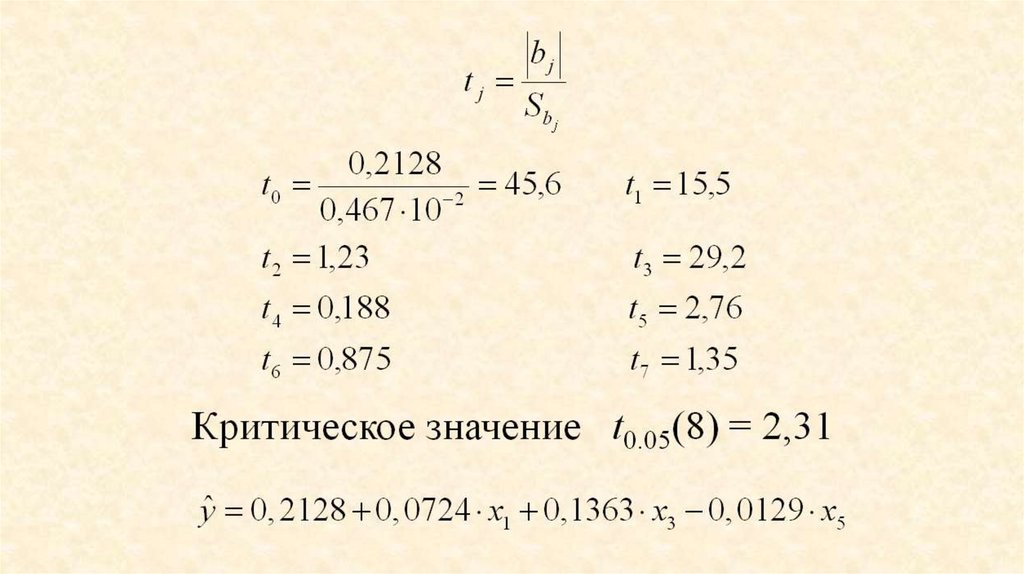
t
bj
Sb j
t0.05 ( f в оспр. )
b j t0.05 S b j b j
т.е. когда погрешность ±∆bj коэффициента
превосходит само значение bj
231.
Условия опытов в центре планадля рассматриваемого примера:
Z10 1500 C
0
x1 0
Z 20 4 105 Па
0
x2 0
Z 30 15 мин.
0
x3 0
Результаты реализации 3-х
дополнительных опытов (n0) в ЦП:
y 8,0 %;
0
1
y 9,0 %;
0
2
y 8,8 %;
0
3
232.
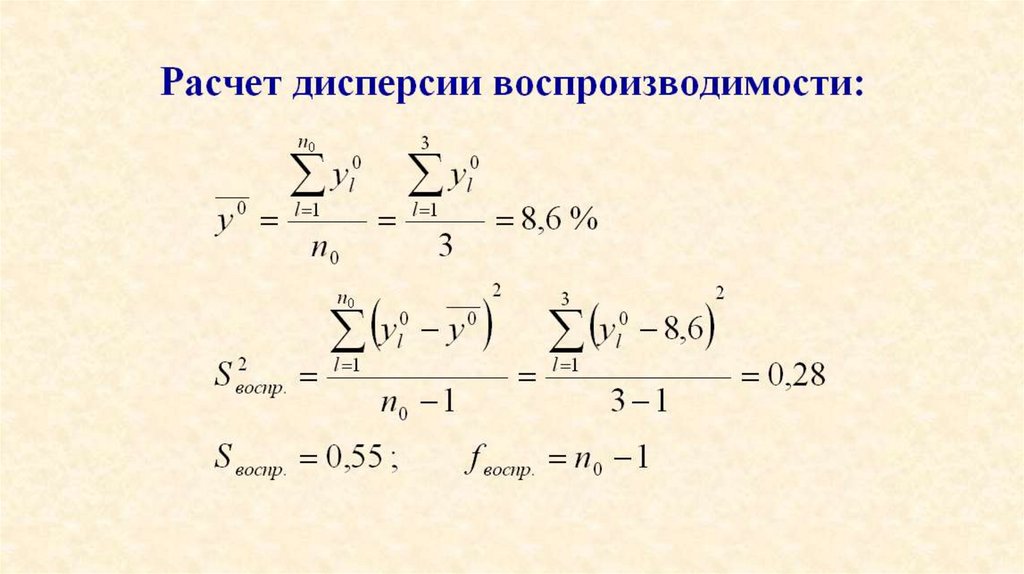
233.
234.
235.
236.
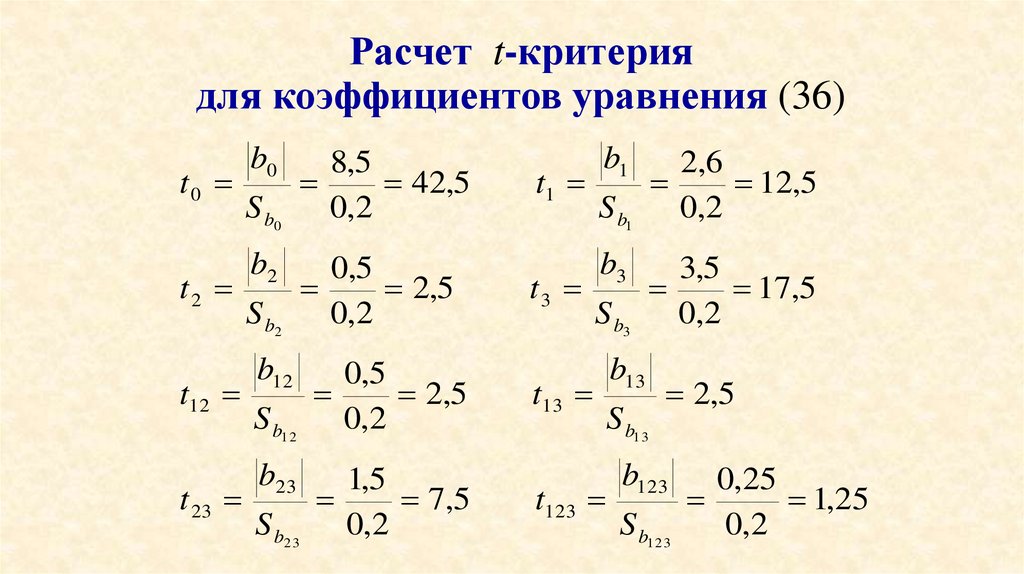
Расчет t-критериядля коэффициентов уравнения (36)
b0
8,5
t0
42,5
S b0
0,2
b2
0,5
t2
2,5
S b2
0,2
b12
0,5
t12
2,5
S b1 2 0,2
b23
1,5
t 23
7,5
S b2 3 0,2
b1
2,6
t1
12,5
S b1 0,2
b3
3,5
t3
17,5
S b3
0,2
t13
b13
S b1 3
2,5
b123
0,25
t123
1,25
S b1 2 3
0,2
237.
Критическое значение t0.05(2) = 4,3027- для числа степеней свободы
fвоспр. = n0 ̶ 1 = 2 .
Коэффициенты “ bj ”, для которых
рассчитанное значение
tj < t0.05(2)=4,3027 , отбрасываются как
незначимые без пересчета
оставшихся “ bj ” .
Это: b2 , b12 , b13 , b123 !!!
238.
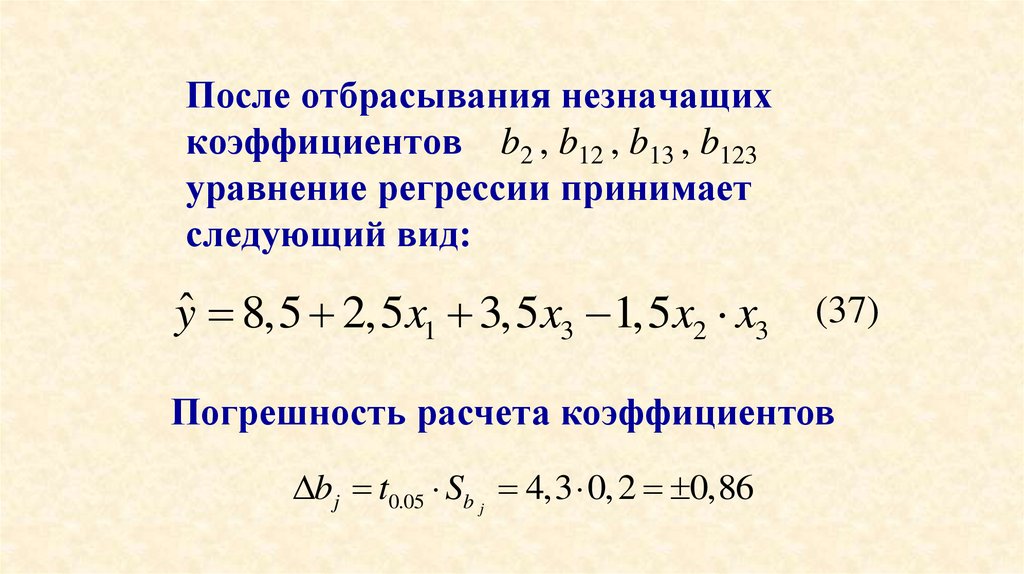
После отбрасывания незначащихкоэффициентов b2 , b12 , b13 , b123
уравнение регрессии принимает
следующий вид:
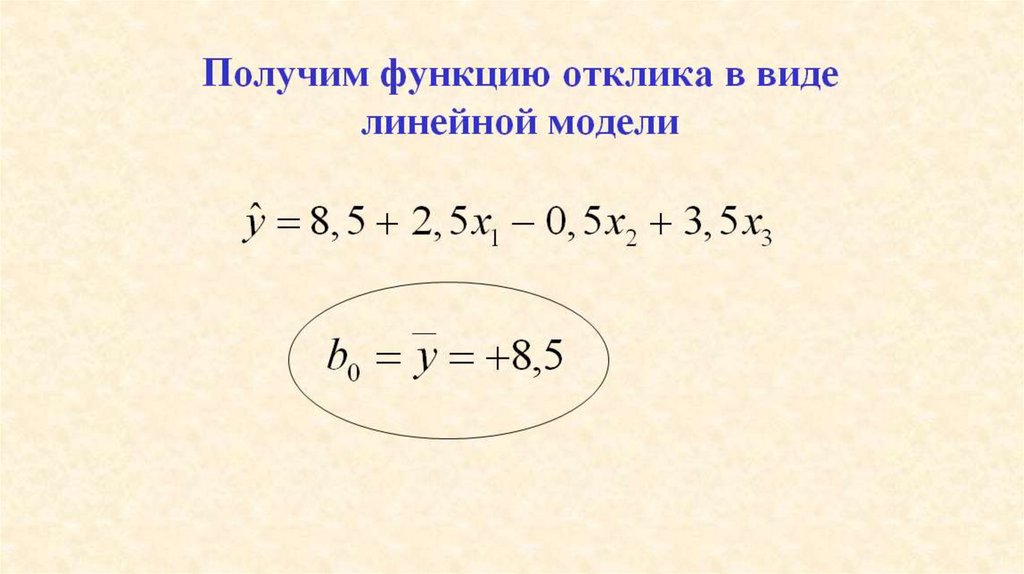
yˆ 8,5 2,5 x1 3,5 x3 1,5 x2 x3 (37)
Погрешность расчета коэффициентов
b j t0.05 Sb j 4,3 0, 2 0,86
239.
Следующий этап –проверка адекватности
модели, т.е. уравнения (37)
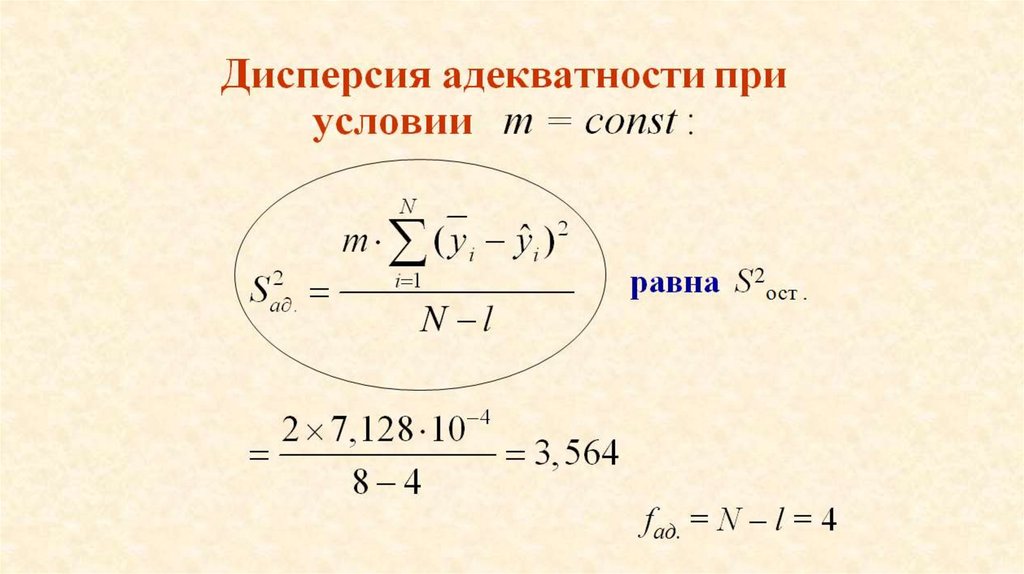
240.
Проверка адекватностиуравнения модели заключается
в сравнении точности модели
с точностью экспериментальных
наблюдений.
Если погрешности модели
значимо превосходят погрешности
наблюдений, то гипотеза об
адекватности модели отклоняется!
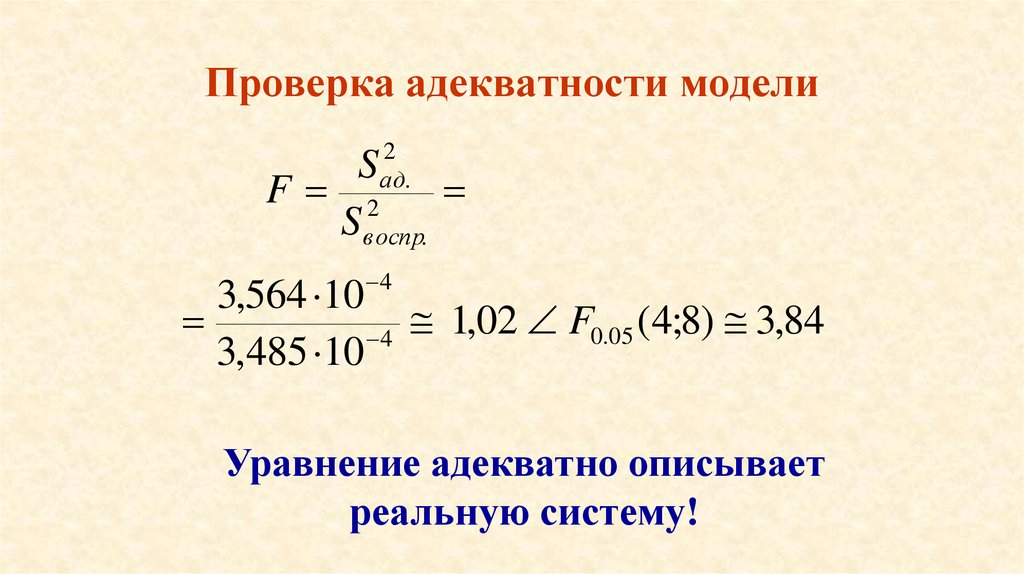
241.
Проверка адекватности уравнениярегрессии, полученного методом ПФЭ
Проверку ведут при помощи
F -критерия, сравнивая S 2ад. и S 2воспр.
Н0: σ 2ад.= σ 2воспр. ─ уравн-е адекватно;
Н1: σ 2ад.> σ 2воспр. ─ урав-е неадекватно.
Следовательно, используем односторонний
F -критерий ( при q = 0.05 ) !!!
242.
Условие принятия Н0 :2
S ад
F 2 . Fq ( f ад. ; f воспр. )
S воспр.
2
ад.
S
Если: F 2 Fq ( f ад. ; f в оспр. ) ,
S в оспр.
то модель (37) неадекватна объекту.
В этом случае необходимо
проанализировать причину
неадекватности.
243.
В том случае, когда в расчетуравнения регрессии не входят
опыты в ЦП, дисперсия
адекватности принимается равной
остаточной дисперсии:
S 2ад. = S 2ост.
fад.= fост.= N ̶ l = 8 ̶ 4 = 4
где: l - число значимых членов
уравнения регрессии (37) .
244.
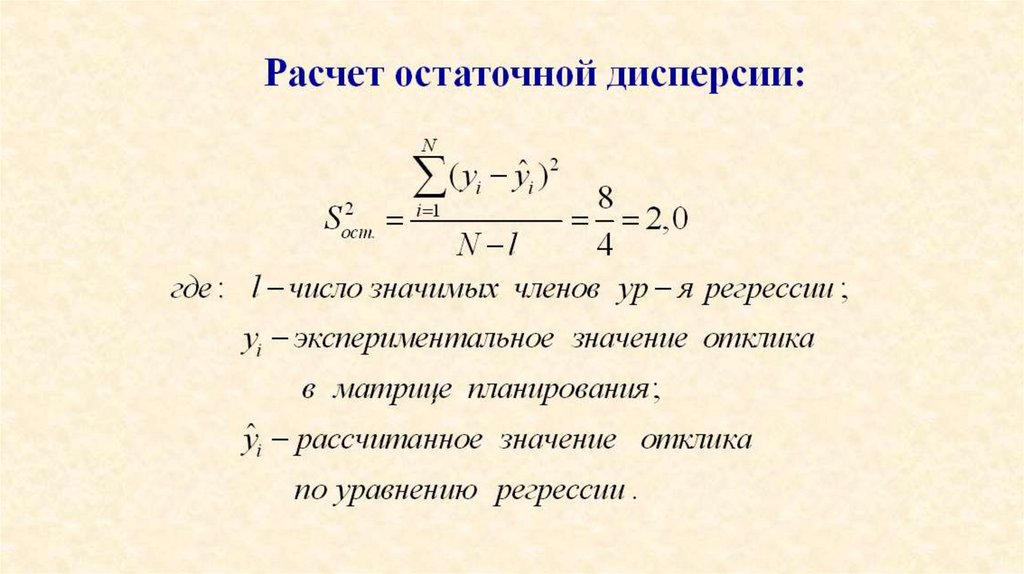
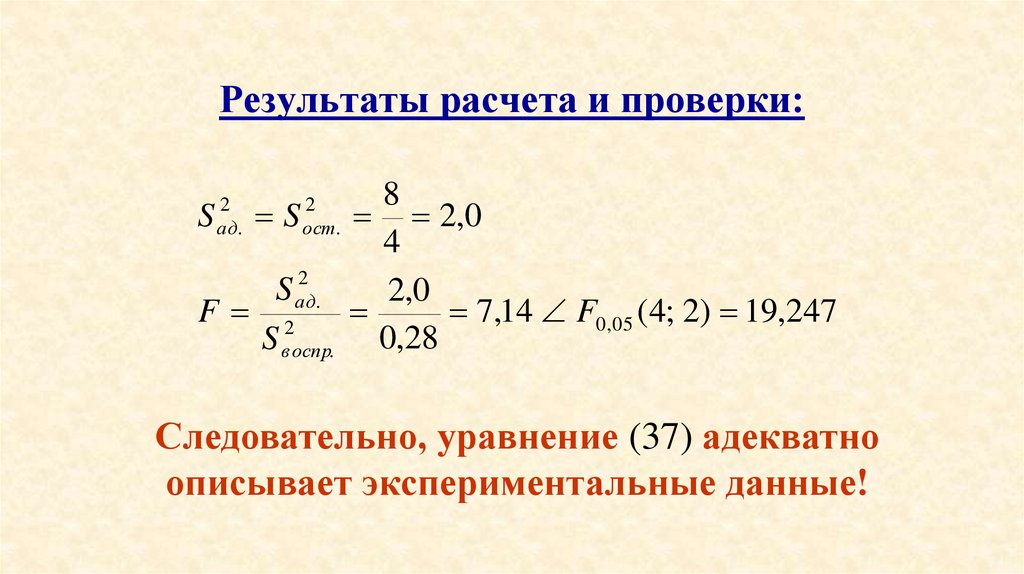
245.
Результаты расчета и проверки:8
S S
2,0
4
2
S ад.
2,0
F 2
7,14 F0, 05 (4; 2) 19,247
S воспр. 0,28
2
ад.
2
ост.
Следовательно, уравнение (37) адекватно
описывает экспериментальные данные!
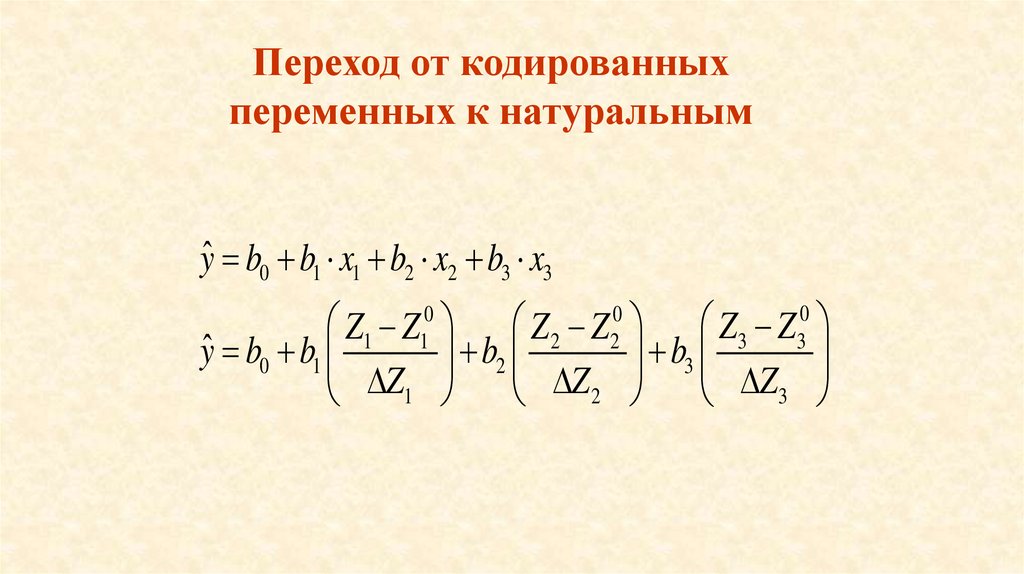
246.
Переход от кодированныхпеременных к натуральным
yˆ b0 b1 x1 b2 x2 b3 x3
Z1 Z10 Z 2 Z 20 Z3 Z30
yˆ b0 b1
b2
b3
Z1 Z 2 Z3
247.
ДРОБНЫЙ ФАКТОРНЫЙЭКСПЕРИМЕНТ (ДФЭ)
- это эксперимент, в котором
пропущены некоторые сочетания
факторов, т.е. столбцы (хu xj)
взаимодействий изучаемых
факторов в плане ПФЭ.
248.
Сочетания факторов в матрице ПФЭ 23N
x0
x1
x2
x3 x1x2 x1x3 x2x3 x1x2x3
1
2
+1
+1
-1
+1
-1
-1
-1
-1
+1
-1
+1
-1
+1
+1
-1
+1
3
+1
-1
+1
-1
-1
+1
-1
+1
4
+1
+1
+1
-1
+1
-1
-1
-1
5
+1
-1
-1
+1
+1
-1
-1
+1
6
+1
+1
-1
+1
-1
+1
-1
-1
7
+1
-1
+1 +1
-1
-1
+1
-1
8
+1
+1
+1 +1
+1
+1
+1
+1
[Х]
249.
Сокращение сочетаний фактороввсегда ведет к потере части
информации. ДФЭ планируют так,
чтобы терялась наименее
существенная часть информации.
Например, когда пренебрегают
информацией о взаимодействии
факторов (предполагают, что они
незначимы).
250.
Необходимое число опытов (N):при ПФЭ равно: N = n k ,
при ДФЭ равно: N = n k-p ,
где: n – количество выбранных
уровней,
k – число факторов,
р – число пропущенных
сочетаний факторов.
251.
Если пренебречь информациейо взаимодействии факторов,
т.е. ограничиться линейной
моделью, то “ N ” можно резко
сократить, используя так
называемые дробные реплики
(ДР) от ПФЭ.
252.
Чтобы ДР представлялаортогональный план, в качестве
реплики следует использовать план
ПФЭ для меньшего числа факторов,
в котором столбцы взаимодействия
[хuхj] заменены линейными столбцами
[хk] , которым нет места в выбранном
плане ПФЭ .
При этом должно выполняться
условие: N ≥ l .
253.
254.
В ПФЭ эта задача решаетсяпри N = 8 .
В ДФЭ можно ограничиться
4-мя опытами, если в качестве
плана эксперимента выбрать
план ПФЭ типа 22 .
(см. следующий слайд)
255.
Вариантыпропущенных сочетаний в ДФЭ
х0
х1
х2
х3
х0
х1
х2
х3
+
+
+
-
+
+
+
+
+
-
+
+
+
-
+
-
+
+
-
-
+
+
-
-
+
а
-
-
+
+
б
-
-
+
256.
Матрица планирования вварианте а) - не ортогональна!
Скалярное произведение столбцов
[ х1] на [ х3] не равно нулю!
257.
В качестве плана для третьегофактора х3 , который не может
существовать в плане ПФЭ типа 22 ,
используем столбец [х1х2] плана 22 ,
т.е. заменим столбец [х1х2] в ПФЭ 22
на столбец [x3] в ДФЭ 23-1 .
Это будет полуреплика плана ПФЭ
типа 23 или ДФЭ 23-1 (всего 4 опыта
вместо 8-ми в ПФЭ типа 23 ).
258.
План ПФЭ 22х3
N
опыта
1
х0
х1
х2
х1 х2
+1
+1
+1
+1
2
+1
-1
+1
-1
3
+1
+1
-1
-1
4
+1
-1
-1
+1
259.
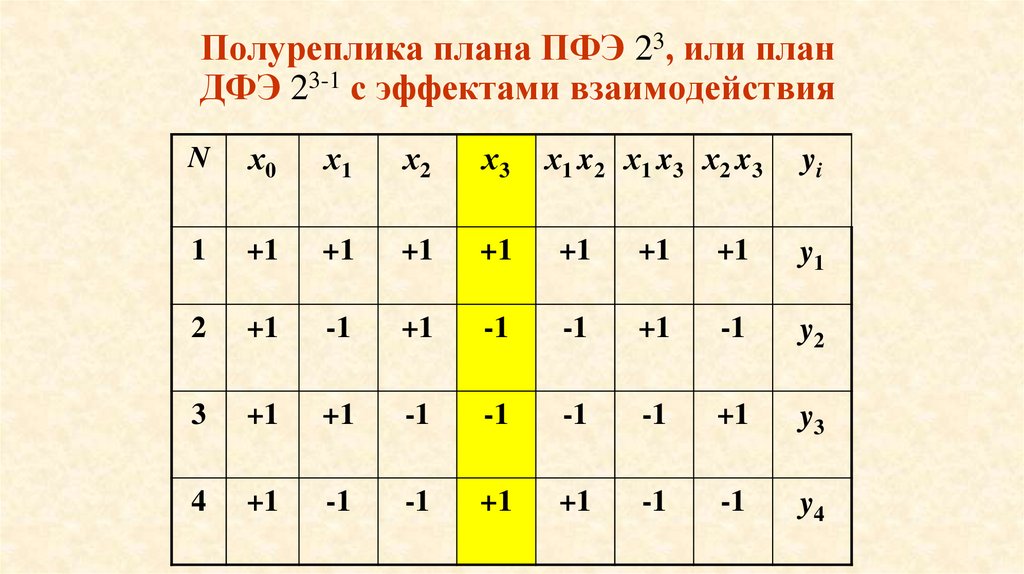
Полуреплика плана ПФЭ 23, или планДФЭ 23-1 с эффектами взаимодействия
N
х0
х1
х2
х3
х1 x2 х1 x3 х2 x3
yi
1
+1
+1
+1
+1
+1
+1
+1
y1
2
+1
-1
+1
-1
-1
+1
-1
y2
3
+1
+1
-1
-1
-1
-1
+1
y3
4
+1
-1
-1
+1
+1
-1
-1
y4
260.
Т.к. в ДР часть взаимодействийзаменена новыми факторами, то
“ b ” могут являться совместными
оценками линейных эффектов и
эффектов взаимодействия.
Оценки, в которых невозможно
разделить линейный эффект “ bj ”
и эффект взаимодействия “ buj ” ,
называют смешанными, т.е.
они будут одинаковыми bj = buj .
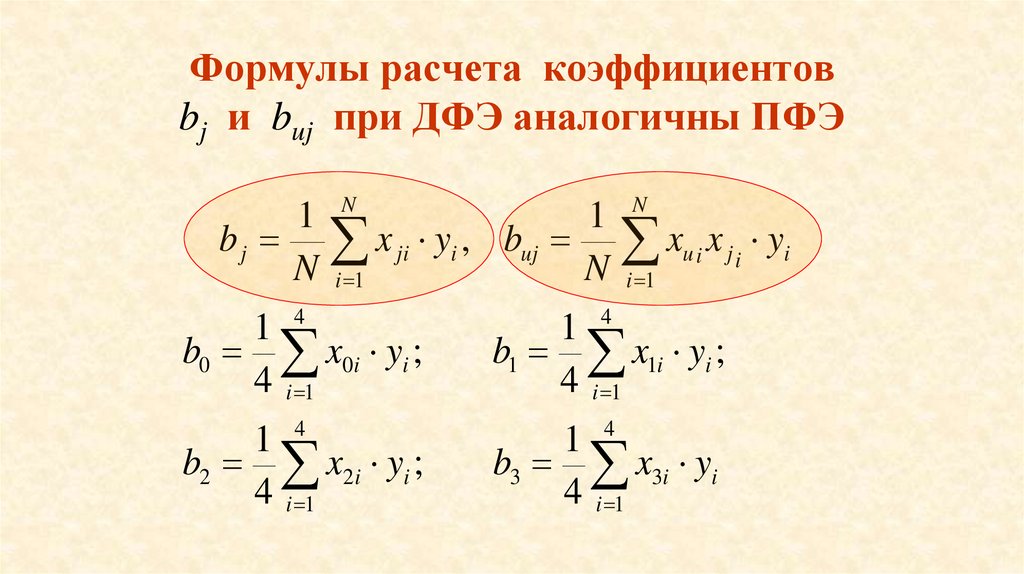
261.
Формулы расчета коэффициентовbj и buj при ДФЭ аналогичны ПФЭ
N
N
1
1
b j x ji yi , buj xu i x j i yi
N i 1
N i 1
1 4
b0 x0i yi ;
4 i 1
1 4
b1 x1i yi ;
4 i 1
1 4
b2 x2i yi ;
4 i 1
1 4
b3 x3i yi
4 i 1
262.
Процедуры проверки значимости bjи адекватности полученного по ДФЭ
уравнения регрессии такие же, как в
ПФЭ: нахождение S 2воспр. по
дополнительным опытам в ЦП,
или дублированием m-раз каждого
опыта; далее → расчет S 2ад.
или S 2ост. ; вычисление критериев
Стьюдента и Фишера; принятие
гипотез.
263.
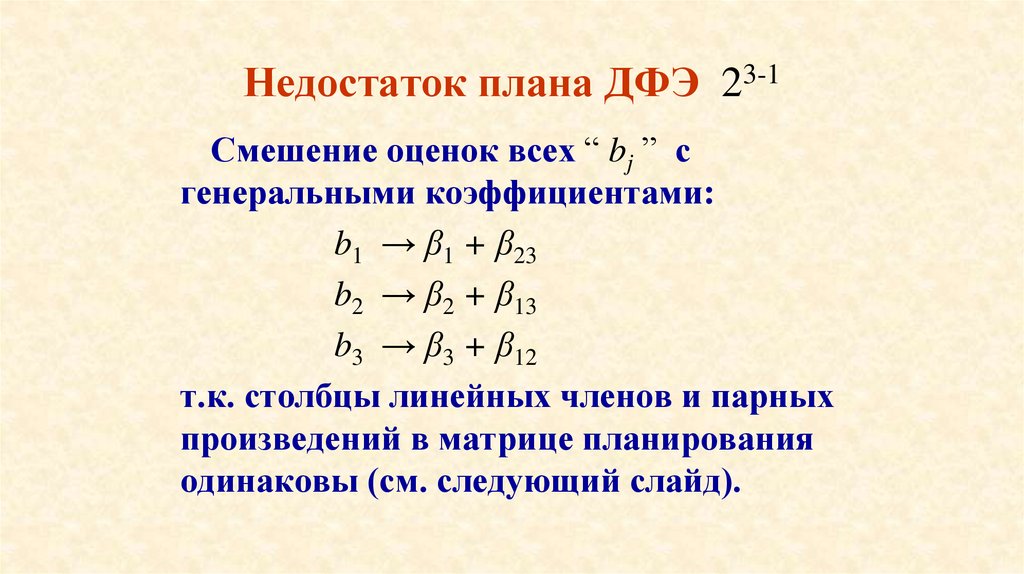
Недостаток плана ДФЭ 23-1Смешение оценок всех “ bj ” с
генеральными коэффициентами:
b1 → β1 + β23
b2 → β2 + β13
b3 → β3 + β12
т.к. столбцы линейных членов и парных
произведений в матрице планирования
одинаковы (см. следующий слайд).
264.
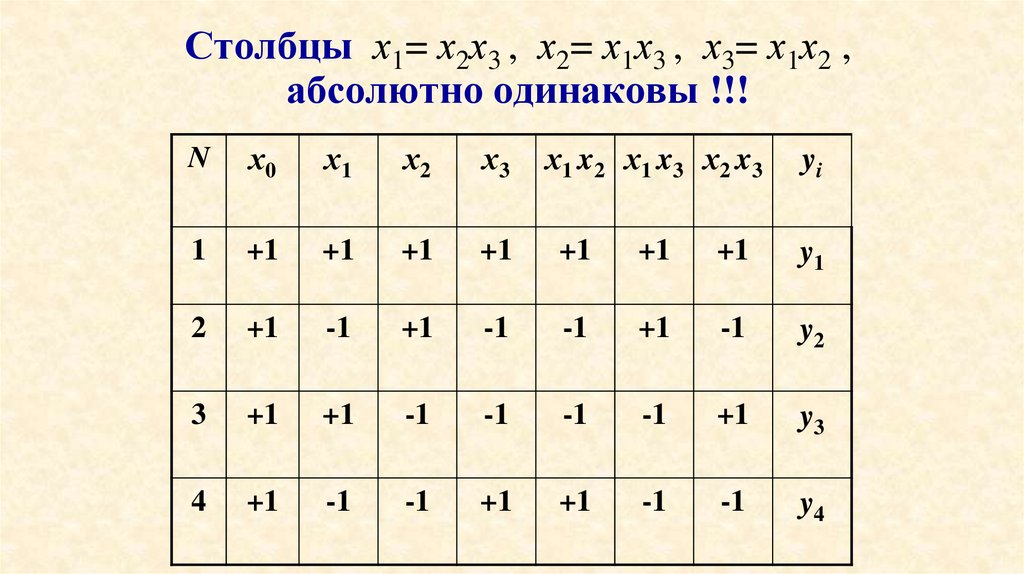
Столбцы х1= х2х3 , х2= х1х3 , х3= х1х2 ,абсолютно одинаковы !!!
N
х0
х1
х2
х3
х1 x2 х1 x3 х2 x3
yi
1
+1
+1
+1
+1
+1
+1
+1
y1
2
+1
-1
+1
-1
-1
+1
-1
y2
3
+1
+1
-1
-1
-1
-1
+1
y3
4
+1
-1
-1
+1
+1
-1
-1
y4
265.
В общем виде дробность репликиобозначается как ДФЭ 2 k-p
р = 1 – полуреплика (1/2);
р = 2 – четверть (1/4) реплики;
р = 3 – 1/8 реплики плана;
р = 4 – 1/16 реплики и т.д. ПФЭ 2k
266.
Число опытов в ДФЭ дляполучения оценок “ bj ” должно
удовлетворять условию:
k+1 ≤ N < 2k
Если N = k+1, т.е. равно числу bj ,
то такой план называют
насыщенным. В нем все линейные
эффекты смешаны с эффектами
взаимодействия ; + fост. = N - l = 0
267.
План ПФЭ 22х3
N
х0
х1
х2
х1 х2
1
+1
+1
+1
+1
2
+1
-1
+1
-1
3
+1
+1
-1
-1
4
+1
-1
-1
+1
268.
Полуреплика плана ПФЭ 23, или планДФЭ 23-1 с эффектами взаимодействия
!! х1 = х2х3; х2 = х1х3; х3 = х1х2 !!
N
х0
х1
х2
х3
х1 x2 х1 x3 х2 x3
yi
1
+1
+1
+1
+1
+1
+1
+1
y1
2
+1
-1
+1
-1
-1
+1
-1
y2
3
+1
+1
-1
-1
-1
-1
+1
y3
4
+1
-1
-1
+1
+1
-1
-1
y4
269.
ПРОВЕРКА РАЗРЕШАЮЩЕЙСПОСОБНОСТИ ДРОБНЫХ РЕПЛИК
Недостатком использования ДР
является смешение оценок bj друг с
другом, т.к. столбцы линейных членов
и парных произведений в матрице
планирования будут одинаковы.
270.
План ПФЭ 22х3
N
х0
х1
х2
х1 х2
1
+1
+1
+1
+1
2
+1
-1
+1
-1
3
+1
+1
-1
-1
4
+1
-1
-1
+1
271.
Генерирующее соотношение –столбец взаимодействия факторов
в матрице ПФЭ, которым
заменяют в дробной реплике
столбец линейного эффекта.
В нашем случае ГС: х3 = х1х2
272.
Умножим обе частигенерирующего соотношения на х3 :
x x1 x2 x3
2
3
При этом слева получим так
называемый единичный столбец:
1 x1 x2 x3
(38)
Выражение (38) называют
определяющим контрастом (ОК).
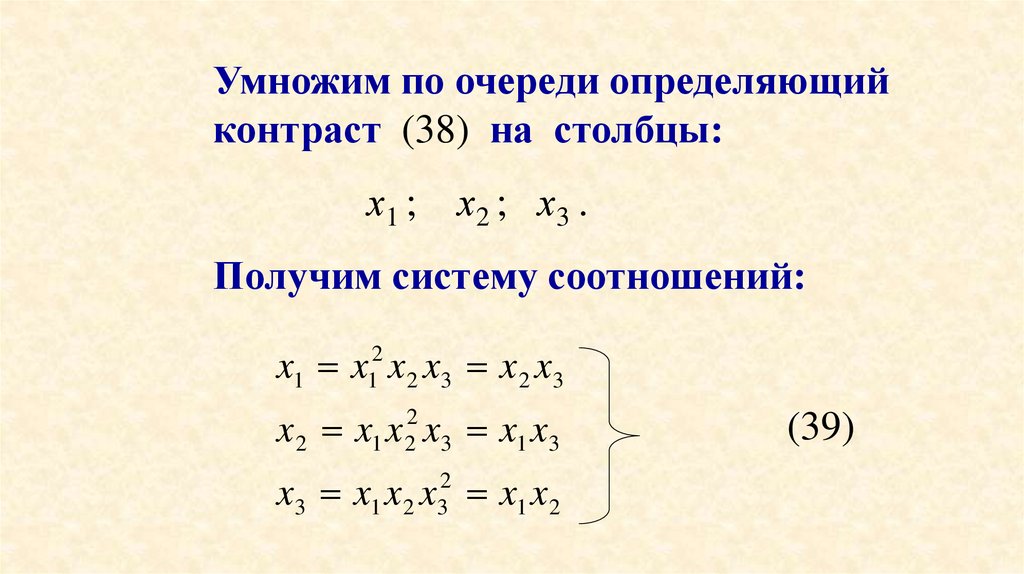
273.
Умножим по очереди определяющийконтраст (38) на столбцы:
х 1 ; х2 ; х3 .
Получим систему соотношений:
x1 x x 2 x3 x 2 x3
2
1
x 2 x x x3 x1 x3
2
1 2
x3 x1 x 2 x x1 x 2
2
3
(39)
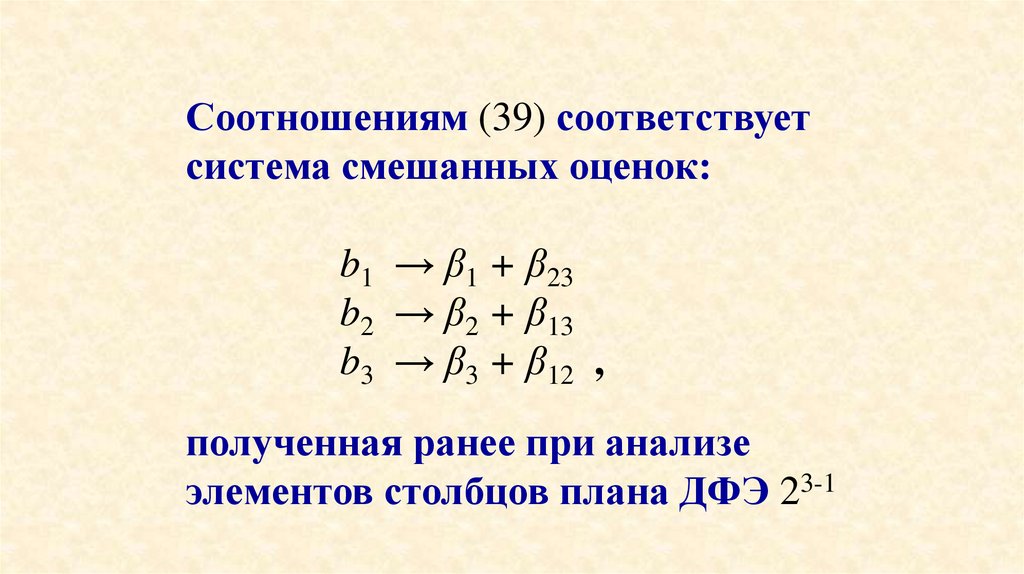
274.
Соотношениям (39) соответствуетсистема смешанных оценок:
b1 → β1 + β23
b2 → β2 + β13
b3 → β3 + β12 ,
полученная ранее при анализе
элементов столбцов плана ДФЭ 23-1
275.
Столбцы х1= х2х3 , х2= х1х3 , х3= х1х2одинаковы. Матрица не ортогональна !
N
х0
х1
х2
х3
х1 x2 х1 x3 х2 x3
yi
1
+1
+1
+1
+1
+1
+1
+1
y1
2
+1
-1
+1
-1
-1
+1
-1
y2
3
+1
+1
-1
-1
-1
-1
+1
y3
4
+1
-1
-1
+1
+1
-1
-1
y4
276.
Разрешающая способность дробнойреплики ДФЭ 23-1 очень плохая:
все линейные эффекты смешаны
с эффектами парного
взаимодействия !
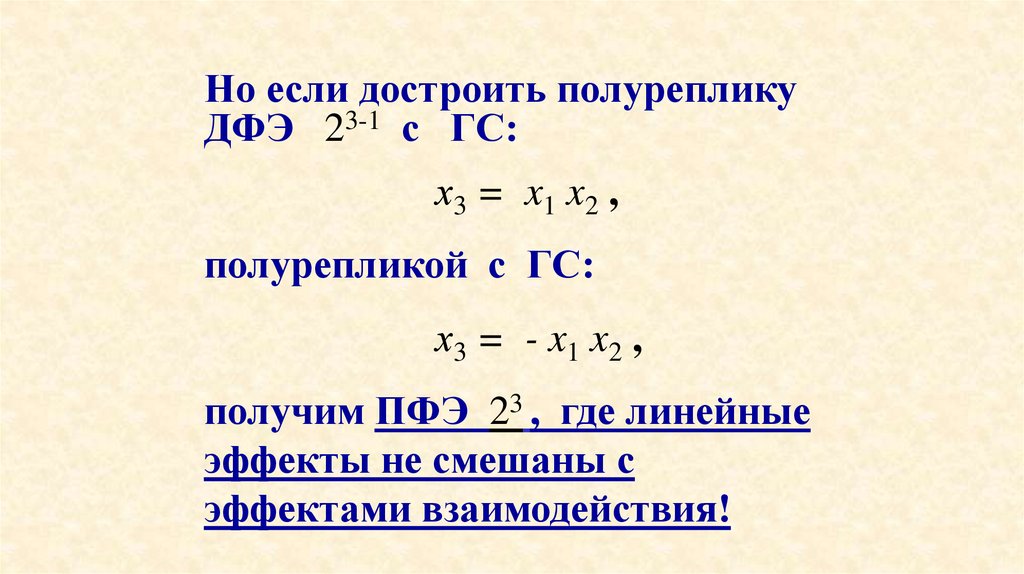
277.
Но если достроить полурепликуДФЭ 23-1 с ГС:
х3 = x1 x2 ,
полурепликой с ГС:
х3 = - x1 x2 ,
получим ПФЭ 23 , где линейные
эффекты не смешаны с
эффектами взаимодействия!
278.
Матрица планирования ДФЭ с ГС х3=х1х2достроенная матрицей с ГС х3=-х1х2
N
x0
x1
x2
x3 x1x2 x1x3 x2x3 x1x2x3 yi
1
2
+1
+1
+1
-1
+1 +1
+1 -1
+1
-1
+1
+1
+1
-1
+1
+1
y1
y2
3
+1
+1
-1
-1
-1
-1
+1
+1
y3
4
+1
-1
-1
+1
+1
-1
-1
+1
y4
5
+1
+1
+1
-1
+1
-1
-1
-1
y5
6
+1
-1
+1 +1
-1
-1
+1
-1
y6
7
+1
+1
-1
+1
-1
+1
-1
-1
y7
8
+1
-1
-1
-1
+1
+1
+1
-1
y8
279.
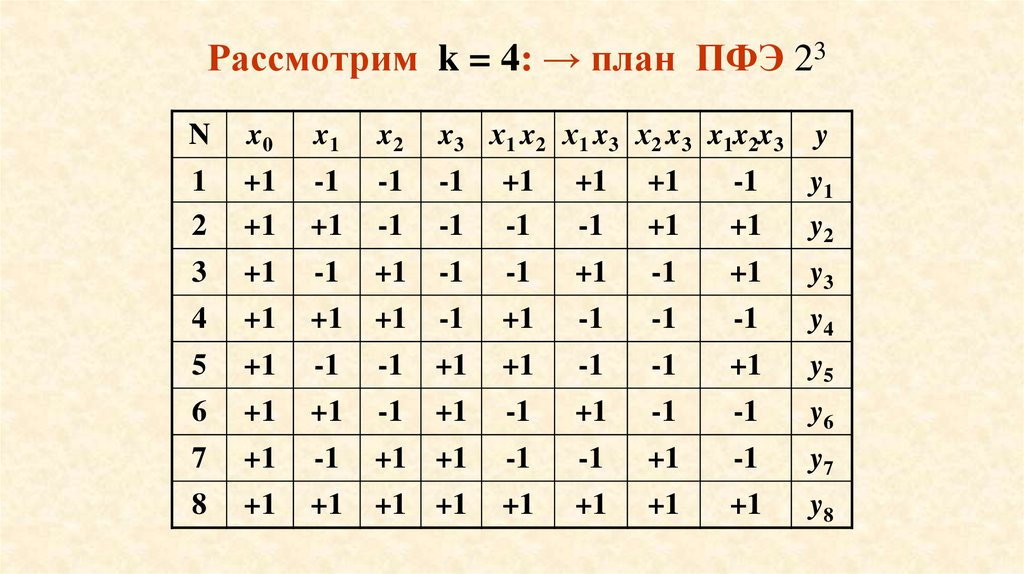
Рассмотрим k = 4: → план ПФЭ 23N
x0
x1
x2
x3 х1 x2 х1 x3 х2 x3 x1x2x3
y
1
2
+1
+1
-1
+1
-1
-1
-1
-1
+1
-1
+1
-1
+1
+1
-1
+1
y1
y2
3
+1
-1
+1
-1
-1
+1
-1
+1
y3
4
+1
+1
+1
-1
+1
-1
-1
-1
y4
5
+1
-1
-1
+1
+1
-1
-1
+1
y5
6
+1
+1
-1
+1
-1
+1
-1
-1
y6
7
+1
-1
+1 +1
-1
-1
+1
-1
y7
8
+1
+1
+1 +1
+1
+1
+1
+1
y8
280.
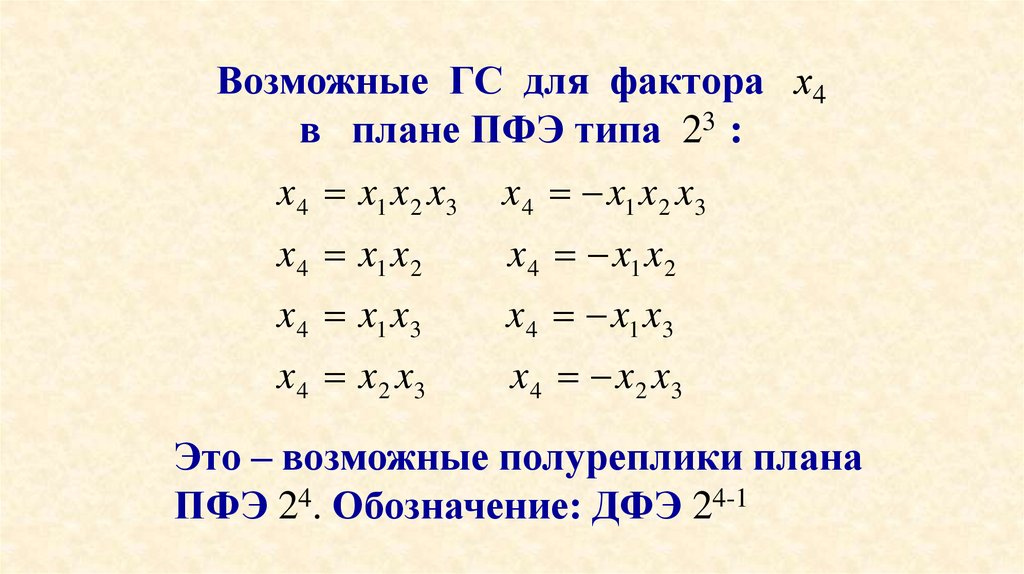
Возможные ГС для фактора х4в плане ПФЭ типа 23 :
x 4 x1 x 2 x3
x 4 x1 x 2 x3
x 4 x1 x 2
x 4 x1 x 2
x 4 x1 x3
x 4 x1 x3
x 4 x 2 x3
x 4 x 2 x3
Это – возможные полуреплики плана
ПФЭ 24. Обозначение: ДФЭ 24-1
281.
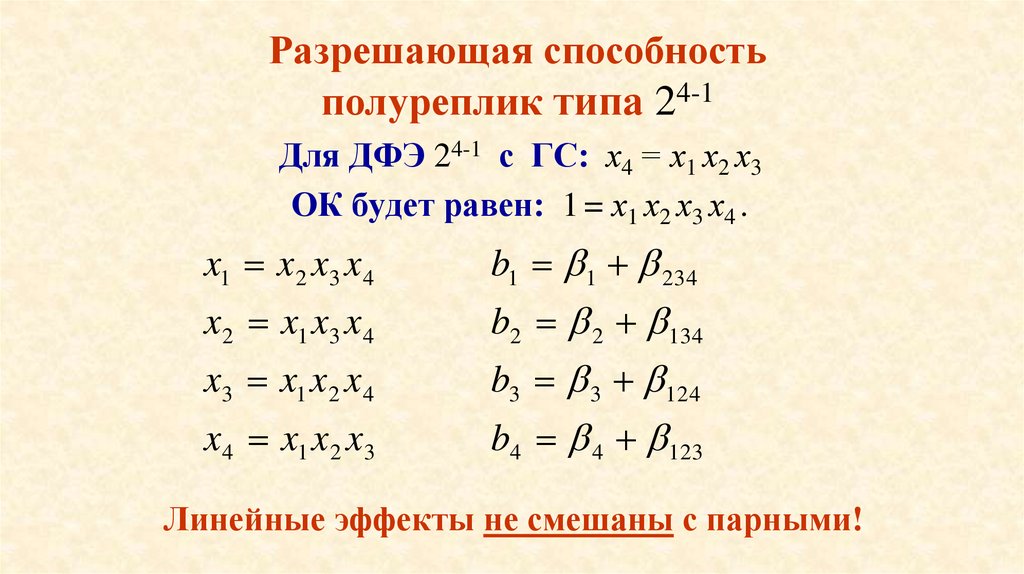
Разрешающая способностьполуреплик типа 24-1
Для ДФЭ 24-1 с ГС: х4 = х1 х2 х3
ОК будет равен: 1 = х1 х2 х3 х4 .
x1 x 2 x3 x 4
b1 1 234
x 2 x1 x3 x 4
b2 2 134
x3 x1 x 2 x 4
b3 3 124
x 4 x1 x 2 x3
b4 4 123
Линейные эффекты не смешаны с парными!
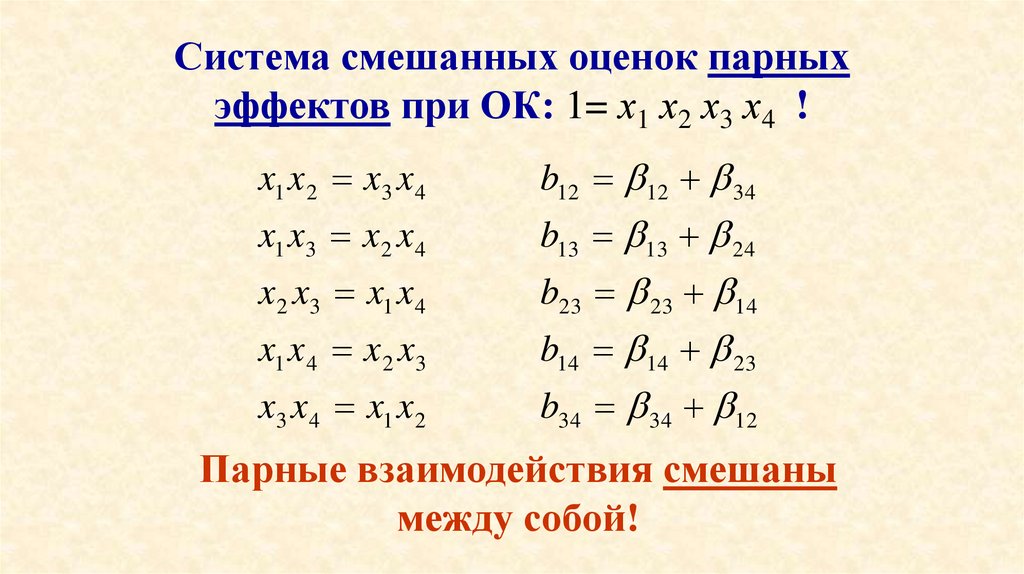
282.
Система смешанных оценок парныхэффектов при ОК: 1= х1 х2 х3 х4 !
x1 x 2 x3 x 4
b12 12 34
x1 x3 x 2 x 4
b13 13 24
x 2 x3 x1 x 4
b23 23 14
x1 x 4 x 2 x3
b14 14 23
x3 x 4 x1 x 2
b34 34 12
Парные взаимодействия смешаны
между собой!
283.
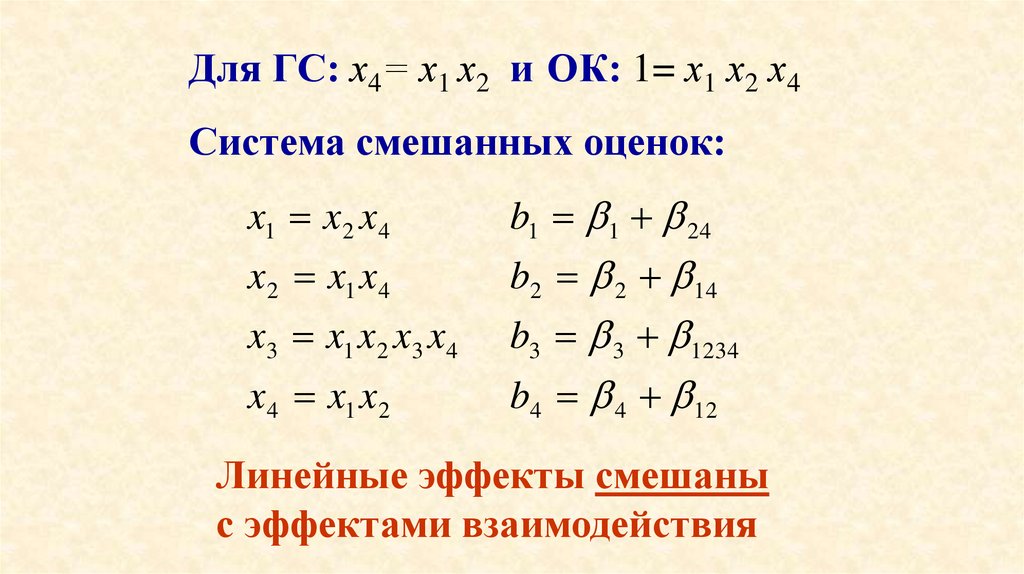
Для ГС: х4= х1 х2 и ОК: 1= х1 х2 х4Система смешанных оценок:
x1 x 2 x 4
b1 1 24
x 2 x1 x 4
b2 2 14
x3 x1 x 2 x3 x 4
b3 3 1234
x 4 x1 x 2
b4 4 12
Линейные эффекты смешаны
с эффектами взаимодействия
284.
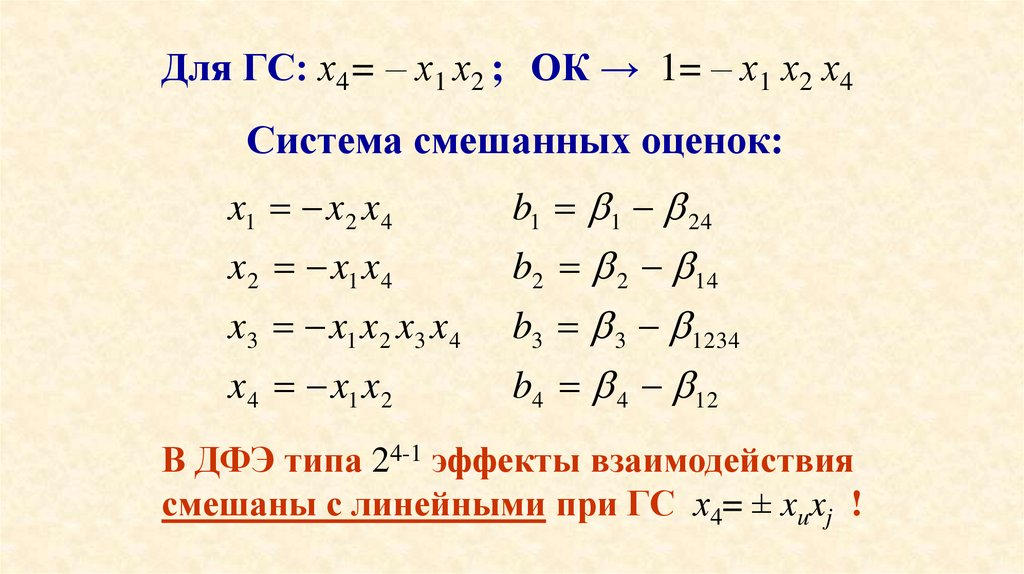
Для ГС: х4= – х1 х2 ; ОК → 1= – х1 х2 х4Система смешанных оценок:
x1 x 2 x 4
b1 1 24
x 2 x1 x 4
b2 2 14
x3 x1 x 2 x3 x 4
b3 3 1234
x 4 x1 x 2
b4 4 12
В ДФЭ типа 24-1 эффекты взаимодействия
смешаны с линейными при ГС х4= ± xuxj !
285.
Если ввести в рассмотрение5-й фактор ( х5 ) и использовать
любой из еще не задействованных
столбцов [хuхj] в матрице ПФЭ 23
качестве плана [х5] , то получим ¼
реплики плана ПФЭ 25 (ДФЭ 25-2).
Если ввести также и “ х6 ” ,
то получим 1/8 реплики ПФЭ 26
или ДФЭ 26-3 и т.д.
286.
Пример с 5-ю факторами (k = 5).В качестве плана ДФЭ выберем
ПФЭ типа 23 и введем
недостающие столбцы для
факторов х4 и х5 .
Это будет ¼ реплики полного
плана ПФЭ 25-2 .
287.
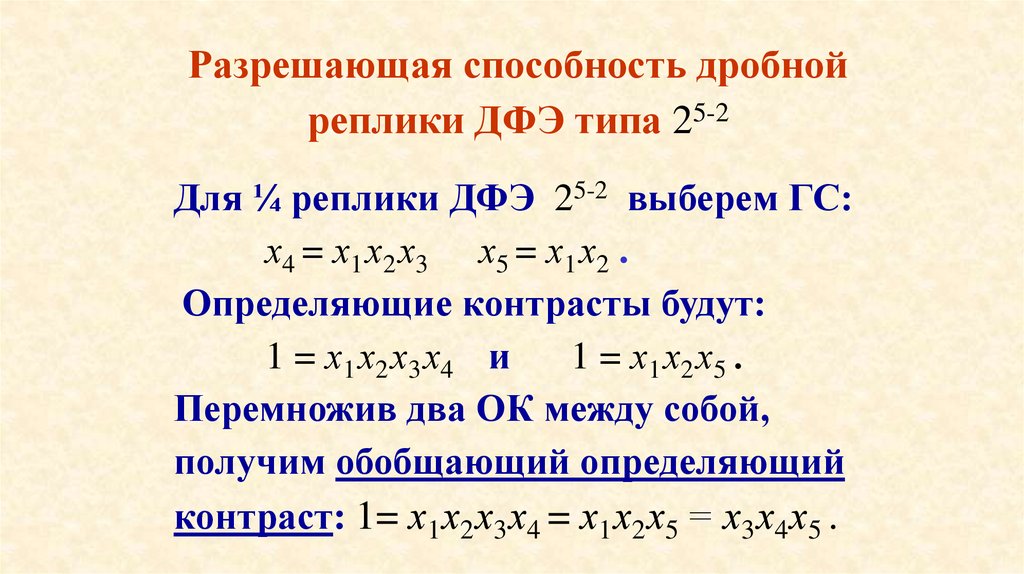
Разрешающая способность дробнойреплики ДФЭ типа 25-2
Для ¼ реплики ДФЭ 25-2 выберем ГС:
х4 = х1 х2 х3 х5 = х1 х2 .
Определяющие контрасты будут:
1 = х1 х2 х3 х4 и
1 = х1 х2 х5 .
Перемножив два ОК между собой,
получим обобщающий определяющий
контраст: 1= х1 х2 х3 х4 = х1 х2 х5 = х3 х4 х5 .
288.
Обобщающий определяющийконтраст полностью
характеризует разрешающую
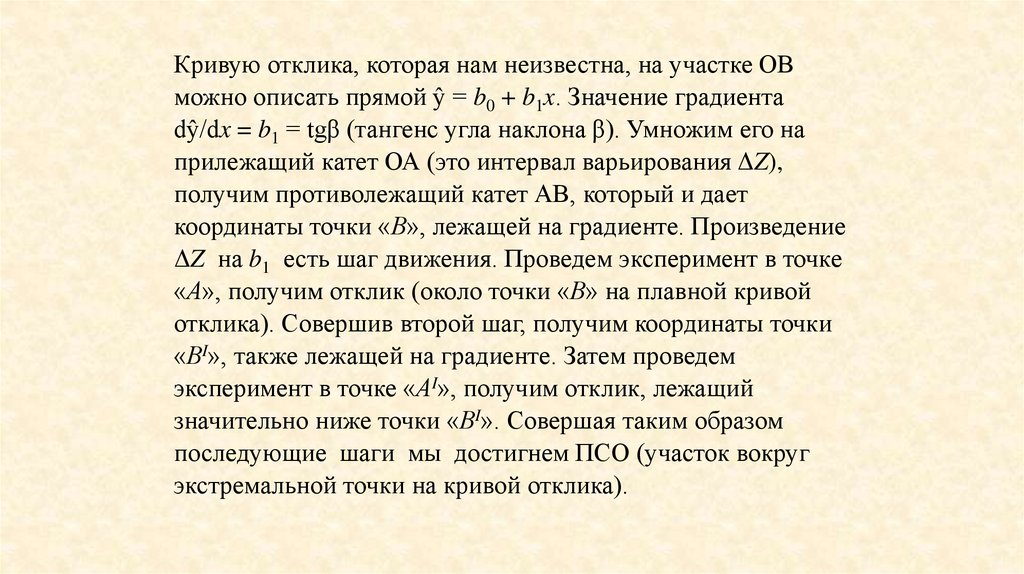
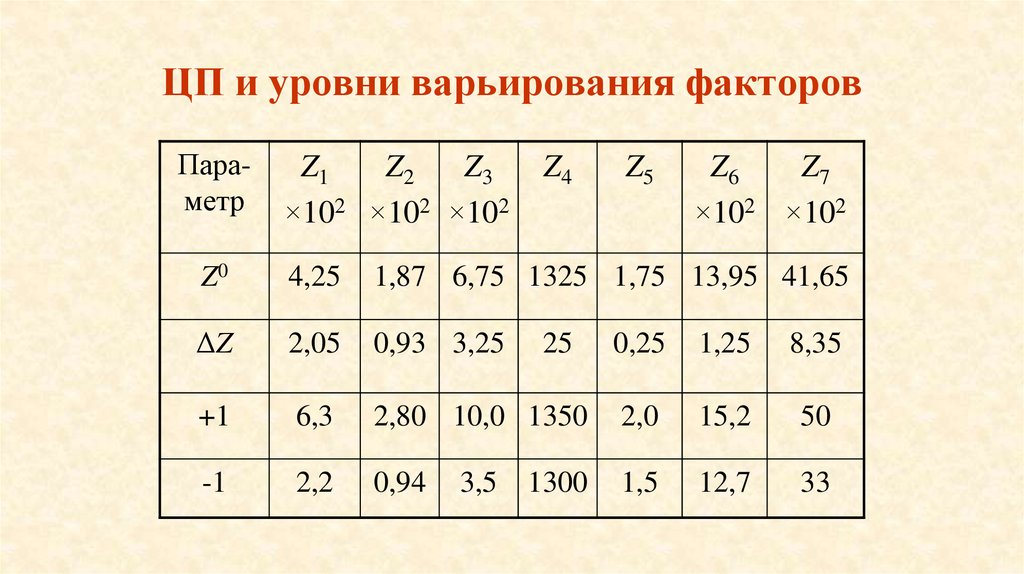
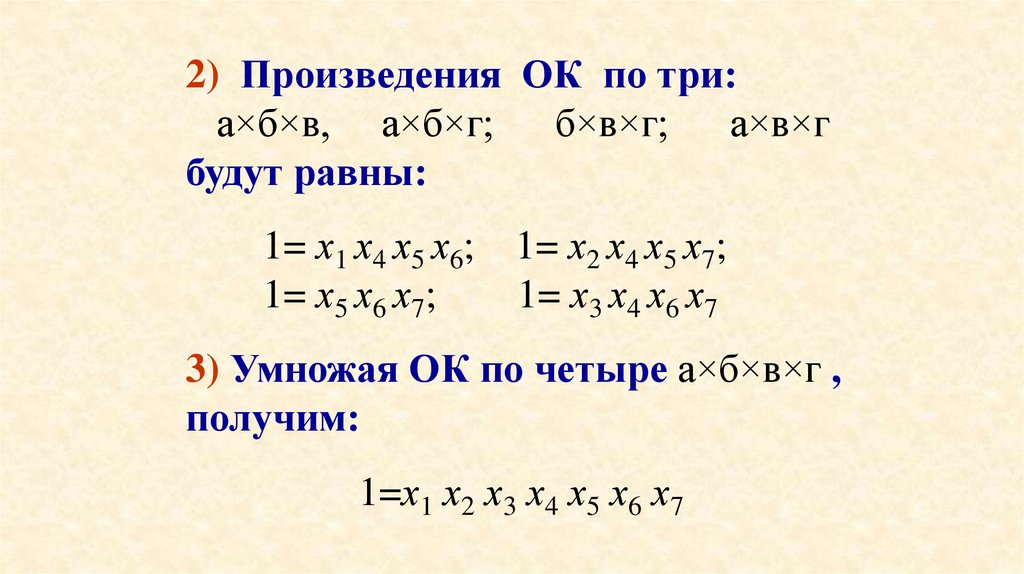
способность дробной ¼ -реплики.
Перемножив его на
соответствующие коэффициенты,
получим следующую систему
совместных оценок :
289.
Результат умножения “ хj ” наобобщающий определяющий контраст:
x1 x2 x3 x4 x2 x5 x1 x3 x4 x5
x2 x1 x3 x4 x1 x5 x2 x3 x4 x5
x3 x1 x2 x4 x1 x2 x3 x5 x4 x5
x4 x1 x2 x3 x1 x2 x4 x5 x3 x5
x5 x1 x2 x3 x4 x5 x1 x2 x3 x4
290.
Система смешанных оценоклинейных эффектов:
b1 1 234 25 1345
b2 2 134 15 2345
b3 3 124 1235 45
b4 4 123 1245 35
b5 5 12345 12 34
291.
Как видно, разрешающая способность¼ реплики ДФЭ 25-2 также невелика:
все линейные эффекты смешаны с
эффектами парного взаимодействия.
В реальных задачах тройные
эффекты встречаются значительно
реже, чем двойные. Вероятность
четверных еще меньше, поэтому
предпочтительнее выбирать ГС из
тройных и четверных взаимодействий.
292.
Разрешающая способностьполуреплики ДФЭ 25-1
Возьмем ПФЭ 24 и ГС х5 = х1х2х3х4 .
ОК→1 = х1х2х3х4х5 . Проверим
смешение эффектов:
х1= х2х3х4х5
b1= β1 + β2345
х3= х1х2х4х5
b3= β3 + β1245 … и т.д.
х1 х4 = х2 х3 х5
b14=β14+ β235
х3 х5 = х1 х2 х4
b35=β35+ β124
х1 х5 = х2 х3 х4
b15=β15+ β234 … и т.д.
293.
Только в полуреплике ДФЭ 25-1 сгенерирующим соотношением:
х 5 = х1 х2 х3 х 4
все линейные эффекты и
эффекты парного взаимодействия
смешаны только с эффектами
тройного и более высокого
порядков.
294.
РезюмеИспользуя ДФЭ всегда следует
помнить, что сокращение числа
пропущенных сочетаний факторов
[хuхj] в исходном плане ПФЭ всегда
приводит к потере информации.
Поэтому эксперимент следует
спланировать так, чтобы терялась
наименее важная ее часть.
295.
Достоинства двухуровневых плановПФЭ и ДФЭ типа 2k и 2k-р
• Ортогональность:
план ортогонален, если ему
соответствует диагональная
( Х ТХ ) -матрица.
Оценки всех bj получают независимо
друг от друга. Они вычисляются по
всем N опытам. Все вычисления
просты, а оценки bj эффективны.
296.
• D-оптимальность: план при которомобъем эллипсоида рассеяния оценок bj
минимизируется на множестве
планов в заданной области называют
D-оптимальным.
k 2 2 2
k
Vk
k
k
T
1 ( X X )
2
- объем эллипсоида
рассеяния оценок bj
Vk - минимален, если определитель
(Х Т Х) - максимален.
297.
• Ротатабельность: план ротатабелен,если соответствующая ему
(Х Т Х)-1 -матрица инвариантна
к вращению координат.
Сие означает равную достоверность
информации на одинаковом удалении
от ЦП в k-мерном пространстве
факторов. Это условие делает любое
направление от ЦП равнозначным по
достоверности.
298.
299.
I 1N S
2
yˆ
- мера информации, содержа-
щейся в уравнении регрессии.
Количество информации убывает
пропорционально ρ2 и одинаково для
всех эквидистантных точек.
300.
Достижение почти стационарнойобласти (ПСО) методом крутого
восхождения по поверхности
отклика (метод Бокса-Уилсона).
ПСО – это область с небольшим
приращением отклика. Поиск
ПСО – задача по оптимизации.
301.
Известно, что движение пократчайшему пути – это движение
по градиенту перпендикулярно
линиям равного отклика.
302.
303.
304.
Затем двигаются (из ЦП!) поповерхности отклика в направлении
градиента линейного приближения,
координаты которого есть:
f
b1
x1
f
b2
x2
f
bk
xk
Знак перед коэффициентом
bj указывает на направление
движения. Если знак «+», то
увеличение значения
фактора увеличивает
отклик, и наоборот при «–».
305.
Расчет движения начинают изЦП с шагом ~bj ·ΔZj по каждому
фактору.
Коэффициент
пропорциональности д.б.
одинаковым для всех факторов!
306.
Техника крутого восхожденияZi
xi
307.
Кривую отклика, которая нам неизвестна, на участке ОВможно описать прямой ŷ = b0 + b1x. Значение градиента
dŷ/dx = b1 = tgβ (тангенс угла наклона β). Умножим его на
прилежащий катет ОА (это интервал варьирования ΔZ),
получим противолежащий катет АВ, который и дает
координаты точки «В», лежащей на градиенте. Произведение
ΔZ на b1 есть шаг движения. Проведем эксперимент в точке
«А», получим отклик (около точки «В» на плавной кривой
отклика). Совершив второй шаг, получим координаты точки
«ВI», также лежащей на градиенте. Затем проведем
эксперимент в точке «АI», получим отклик, лежащий
значительно ниже точки «ВI». Совершая таким образом
последующие шаги мы достигнем ПСО (участок вокруг
экстремальной точки на кривой отклика).
308.
Метод крутого восхождения поповерхности отклика
309.
Пример:Требуется найти оптимальный
состав стекла с максимальной
оптической плотностью
в системе Li2O-Al2O3-SiO2 .
310.
Факторы, влияющие на состав стеклаФАКТОРЫ
Z1
Z2
Z3
Z4
Z5
Z6
Z7
[Cl -] [Br -] Ag :Cl
T
τ
[Al2O3] [Li2O : SiO2]
моль/ моль/ моль
100 г 100 г /моль
стек- стекла
ла
0С
час.
мол.
доли
моль
/моль
311.
ЦП и уровни варьирования факторовПараметр
Z1
Z2
Z3
×102 ×102 ×102
Z4
Z5
Z6
Z7
×102 ×102
Z0
4,25
1,87 6,75 1325 1,75 13,95 41,65
ΔZ
2,05
0,93 3,25
25
0,25
1,25
8,35
+1
6,3
2,80 10,0 1350
2,0
15,2
50
-1
2,2
0,94
1,5
12,7
33
3,5
1300
312.
313.
Насыщенный план ДФЭ 27-4N
x0
x1
x2
x3
х4
х5
х6
х7
1
2
+1
+1
-1
+1
-1
-1
-1
-1
-1
+1
+1
-1
+1
-1
+1
+1
3
+1
-1
+1
-1
+1
-1
+1
-1
4
+1
+1
+1
-1
-1
+1
-1
-1
5
+1
-1
-1
+1
+1
+1
-1
-1
6
+1
+1
-1
+1
-1
-1
+1
-1
7
+1
-1
+1 +1
-1
-1
-1
+1
8
+1
+1
+1 +1
+1
+1
+1
+1
314.
Проверка разрешающейспособности плана ДФЭ типа 27-4
315.
Частные определяющие контрасты:1 = х1 х2 х3 х4
(а)
1 = х1 х 2 х 5
(б)
1 = х1 х3 х6
(в)
1 = х2 х 3 х 7
(г)
1) Перемножим попарно ОК
а×б, а×в, а×г, б×в, б×г, в×г:
1= х3 х4 х5;
1= х2 х4 х6; 1= х1 х4 х7;
1= х2 х3 х5 х6; 1= х1 х3 х5 х7; 1= х1 х2 х6 х7
316.
2) Произведения ОК по три:а×б×в, а×б×г; б×в×г; а×в×г
будут равны:
1= х1 х4 х5 х6; 1= х2 х4 х5 х7;
1= х5 х6 х7;
1= х3 х4 х6 х7
3) Умножая ОК по четыре а×б×в×г ,
получим:
1=х1 х2 х3 х4 х5 х6 х7
317.
Обобщающий ОК будет равен:1= х1 х2 х3 х4 = х1 х2 х5 = х1 х3 х6 = х2 х3 х7 =
= х3 х 4 х5 = х2 х4 х6 = х1 х4 х7 =
= х2 х 3 х5 х6 = х1 х3 х5 х7 = х1 х2 х 6 х7 =
= х1 х 4 х5 х6 = х2 х4 х5 х7 = х5 х6 х 7 =
= х3 х 4 х6 х7 = х1 х2 х3 х4 х5 х6 х7
Пренебрегая эффектами взаимодействия
начиная с тройных, получим систему
совместных оценок:
318.
Система смешанных оценок:b1 1 25 36 47
b2 2 15 37 46
b3 3 16 27 45
b4 4 35 26 17
b5 5 12 34 67
b6 6 13 24 57
b7 7 23 14 56
319.
Недостаток насыщенногоплана ДФЭ 27-4 :
Все полученные по этому плану
линейные эффекты будут смешаны
с эффектами парного
взаимодействиями !!!
320.
7-4Так как план ДФЭ 2
является насыщенным, то для
определения S 2воспр. проводим
дублирование каждого опыта
m – раз.
В настоящем примере m = 2.
321.
322.
Дисперсия в строке(в каждом опыте)
m
S
2
i
(y y )
i
i
m 1
i
2
дисперсия опыта
323.
Проверка гипотезы однородностидисперсий в N опытах при помощи
критерия Кохрена (G), (m=const)
Н0: σ21 = σ22 = σ23 = … = σ2N
Н1: σ21 ≠ σ22 ≠ σ23 ≠ … ≠ σ2N
2
Smax
G N
S
G0.05 ( f1 ; f 2 ) ï ðèí ÿò èå ãèï î ò åçû H 0
2
i
i
f1 m 1 ÷èñëî ñò åï åí åé ñâî áî äû â î ï û ò å;
f2 N
÷èñëî ñðàâí èâàåì û õ âû áî ðî ê
324.
SG N
2
max
S
4
10,13 10
0,363 G0.05 (1;8) 0,68
4
27,88 10
2
i
i
Следовательно генеральные дисперсии
во всех опытах однородны:
σ21= σ22= σ23= …= σ28
325.
Дисперсия воспроизводимости придублировании опытов (m = const)
N
2
S воспр
.
N
S f S
2
i
i
i
N
f
i 1
N
2
i
27,88 10 4
3,485 10 4
8
i
i
Число степеней свободы дисперсии
воспроизводимости ( fвоспр.) равно:
f в оспр. (m 1) N (2 1) 8 8
326.
Расчет коэффициентов “ bj ”N
1
b j x ji y i
N i 1
b0 = 0,2128;
b1 = 0,0724
b2= - 0,00575
b3 = 0,1363
b4= - 0,00088
b5= - 0,0129
b6= - 0,0041
b7 = 0,00625
327.
Проверка гипотезы значимостикоэффициентов уравнения модели
2
Т. к. “ bj” рассчитывают по
S воспр.
2
усредненным уi , и: → S y
m
Sb j
3,485 10 4
2
0,467 10
m N
2 8
S в2оспр.
328.
329.
330.
Проверка адекватности модели2
ад.
S
F 2
S воспр.
4
3,564 10
1,02 F0.05 (4;8) 3,84
4
3,485 10
Уравнение адекватно описывает
реальную систему!
331.
Для расчета шагов крутоговосхождения используем линейное
уравнение только в кодированных
переменных :
yˆ 0, 2128 0,0724 x1 0,1363 x3 0,0129 x5
Значимых факторов - 3, всего
факторов - 7. Что делать с
оставшимися 4 факторами?
332.
Правила фиксации незначимых факторов• Незначимые факторы в движении
по градиенту не участвуют.
• Незначимые факторы фиксируют
в интервале: –1 ; 0; +1 .
• По экономическим соображениям
можно выбрать – нижний уровень.
333.
В нашем примере незначимыефакторы х2 , х4 , х6 , х7
фиксируем на нулевом уровне.
334.
ПСО будет достигнута, если будемдвигаться вдоль осей х1 и х3
в сторону возрастания хj ,
т.к. b1 > 0 и b3 > 0.
Время выдержки зафиксируем на
нижнем уровне (Z5ниж = 1,5 час.) ,
т.к. “ b5” имеет отрицательный
знак, а мы находим максимум.
yˆ 0, 2128 0,0724 x1 0,1363 x3 0,0129 x5
335.
Расчет шага движения (из ЦП !)Параметр
Z1
Z3
Zj 0
0,0425
0,0675
ΔZj
0,0205
0,0325
bj
+0,0724
+0,1363
k
2,5
2,5
шаг = k·bj ·ΔZj
0,0036
0,0111
336.
С какого опыта начинатьреализацию «мысленных
опытов»? Если модель адекватна,
то начинают с тех опытов,
условия которых выходят за
область эксперимента хотя бы по
одному фактору, т.к. внутри
области эксперимента “ ŷ ”
можно рассчитать по найденному
уравнению регрессии.
337.
Для неадекватной модели1 - 2 опыта выполняют в области
эксперимента (матрицы плана).
Условия «мысленных» опытов
тщательно продумывают, если
что-то не получается, можно
изменить шаг и вновь рассчитать
условия «мысленных» опытов
заново.