 Электроника
ЭлектроникаПохожие презентации:










Датчики скорости
1.
Датчики скоростиУпомянутые выше энкодеры могут передавать данные для
вычисления скорости посредством процесса формирования
выходного сигнала, позволяющего выполнить его дальнейшую
обработку.
Это описание не будет полным без упоминания аналоговых
датчиков скорости. В основном они используются для
регулирования скорости и особенно в регуляторах скорости
двигателей постоянного тока. Для работы преобразователя частоты в
замкнутом контуре регулирования, современные регуляторы
скорости применяют виртуальные датчики скорости, которые
используют электрические параметры, замеренные регулятором для
косвенного расчета фактической скорости двигателя.
2.
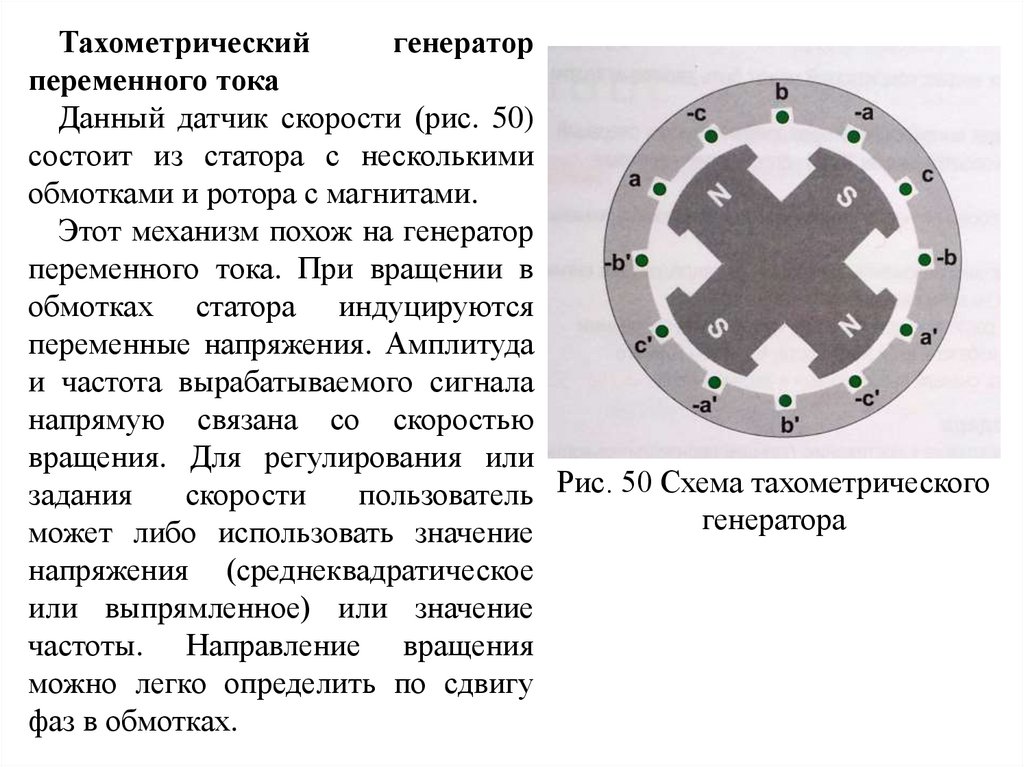
Тахометрическийгенератор
переменного тока
Данный датчик скорости (рис. 50)
состоит из статора с несколькими
обмотками и ротора с магнитами.
Этот механизм похож на генератор
переменного тока. При вращении в
обмотках статора индуцируются
переменные напряжения. Амплитуда
и частота вырабатываемого сигнала
напрямую связана со скоростью
вращения. Для регулирования или
задания
скорости
пользователь Рис. 50 Схема тахометрического
генератора
может либо использовать значение
напряжения (среднеквадратическое
или выпрямленное) или значение
частоты. Направление вращения
можно легко определить по сдвигу
фаз в обмотках.
3.
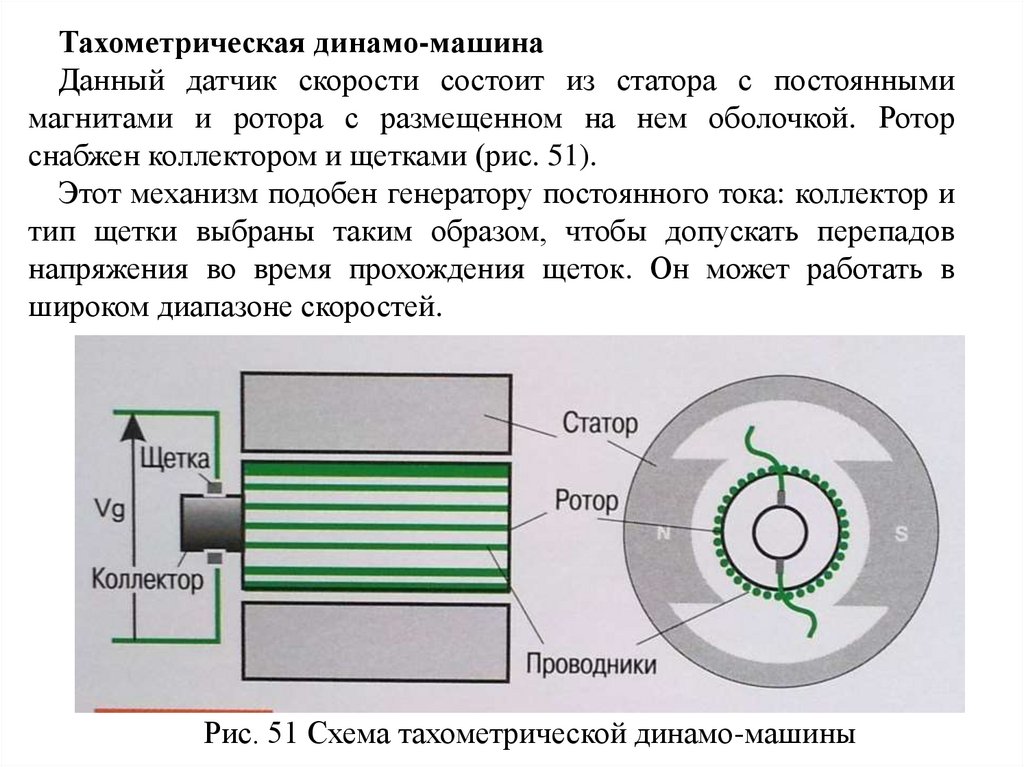
Тахометрическая динамо-машинаДанный датчик скорости состоит из статора с постоянными
магнитами и ротора с размещенном на нем оболочкой. Ротор
снабжен коллектором и щетками (рис. 51).
Этот механизм подобен генератору постоянного тока: коллектор и
тип щетки выбраны таким образом, чтобы допускать перепадов
напряжения во время прохождения щеток. Он может работать в
широком диапазоне скоростей.
Рис. 51 Схема тахометрической динамо-машины
4.
При вращении ротора индуцируется напряжение постоянноготока, полярность которого зависит от направления вращения, а
амплитуда - пропорциональна скорости. Значения амплитуды и
полярности могут быть использованы для регулирования или
формирования заданного значения скорости.
Диапазон напряжений, вырабатываемый этим типом датчика,
варьируется от 10 до 60 В на 1000 оборотов в минуту и для
некоторых типов динамо-машин может задаваться пользователем.
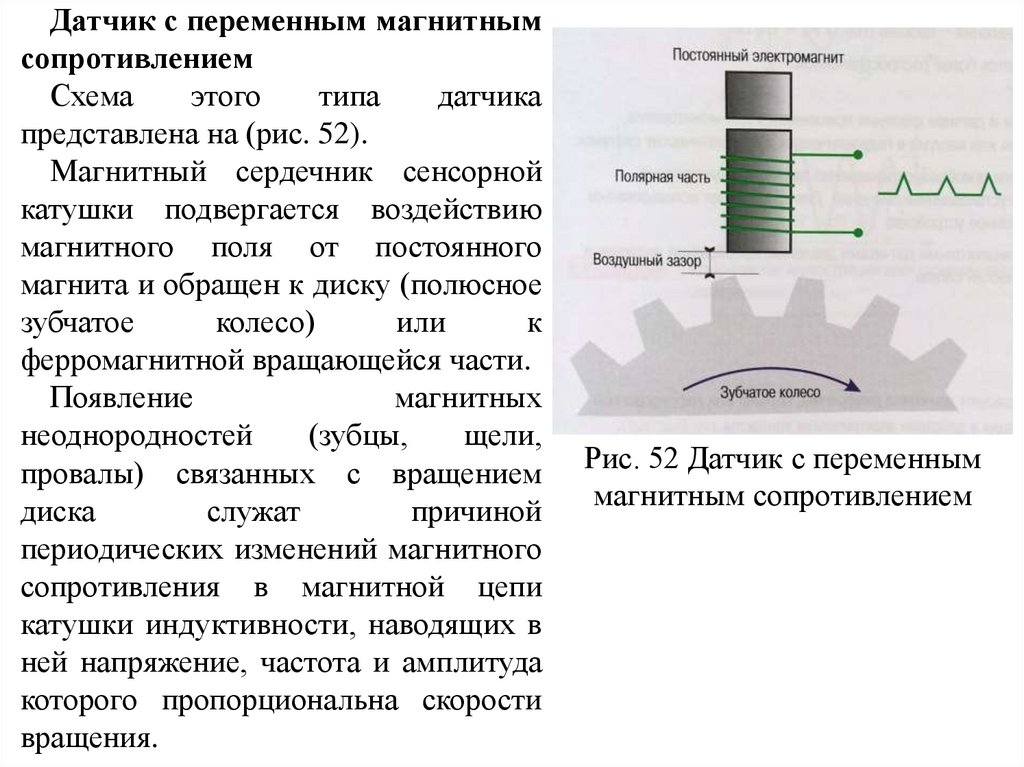
5.
Датчик с переменным магнитнымсопротивлением
Схема
этого
типа
датчика
представлена на (рис. 52).
Магнитный сердечник сенсорной
катушки подвергается воздействию
магнитного поля от постоянного
магнита и обращен к диску (полюсное
зубчатое
колесо)
или
к
ферромагнитной вращающейся части.
Появление
магнитных
неоднородностей
(зубцы,
щели,
провалы) связанных с вращением
диска
служат
причиной
периодических изменений магнитного
сопротивления в магнитной цепи
катушки индуктивности, наводящих в
ней напряжение, частота и амплитуда
которого пропорциональна скорости
вращения.
Рис. 52 Датчик с переменным
магнитным сопротивлением
6.
Амплитуда напряжения зависит от:• расстояния между катушкой и вращающейся частью;
• скорости вращения: в принципе, она пропорциональна этой
скорости, но при низкой скорости амплитуда может быть
недостаточной для регистрации, т.е. если скорость меньше
определенного значения, то этот датчик не используется.
Диапазон измерений датчика зависит от количества магнитных
неоднородностей,
имеющихся
во
вращающейся
части.
Минимальное значение скорости, которую можно измерить,
снижается с ростом числа зубцов. И, наоборот, максимальная
измеряемая скорость растет с уменьшением числа зубцов из-за
трудности обработки высокочастотных сигналов.
Измерения могут проводиться в диапазоне от 50 оборотов в
минуту до 500 оборотов в минуту с 60-зубым полюсным зубчатым
колесом, и от 500 оборотов в минуту до 10 000 оборотов в минуту
с 15-зубым полюсным зубчатым колесом.
Тахометр на вихревых токах сконструирован по тому же
принципу, и его можно использовать с неферромагнитной
металлической вращающейся частью.
7.
Вместо системы катушки индуктивности с постоянныммагнитом здесь применяется колебательный контур. Катушка
индуктивности, которая является также измерительной головкой,
образует индуктивность L измерительной цепи синусоидального
колебательного контура. Характеристики катушки L и R
изменяются по мере приближения металлического проводника.
Когда зубчатое колесо, находящееся перед катушкой, вращается,
то каждый проходящий зубец прерывает определяемый
осциллятором сигнал, например, путем изменения формы тока в
источнике питания.
Частота полученного сигнала пропорциональна скорости
вращения. Амплитуда сигнала в данном случае не определяется
скоростью вращения, то есть она от неё не зависит. Это означает,
что этот тип датчика можно использовать при низких скоростях.
Данный тип датчика также можно использовать для определения
превышения скорости и падения скорости, как это сделано в
индуктивном датчике для контроля вращения Schneider Electric
XSAV••• или XS9•••.