

















 Электроника
ЭлектроникаПохожие презентации:




")

")
. Лекція 2-12")

")
Проектування систем вводу-виводу спеціалізованих ЕОМ
1. ПРОЕКТУВАННЯ СИСТЕМ ВВОДУ-ВИВОДУ СПЕЦІАЛІЗОВАНИХ ЕОМ
2. 1.1. Системи вводу-виводу
Автономні системи вводу-виводу призначені для зменнячасу простою процесора при введенні і виведення даних.
Існуюча раніше спеціалізація ЕОМ, в основі якої лежало використання
різних принципів організації СВВ, практично зникла завдяки успіхам в області
створення універсальної фізичної структури з уніфікованими зв'язками.
В ЕОМ остаточно в минулому розділені їх фізична і функціональна
структури.
Фізична структура - фізичні елементи комплексу і ланцюга, за
допомогою яких може бути виконане (або виконується) їхнє електричне
з'єднання.
Функціональна структура - елементи комплексу, згруповані по
їхньому функціональному призначенню (можливо тимчасово), і ланцюга, по
яких відбувається обмін даними.
Фізична структура СВВ інваріантна до того, які конкретні
функціональні структури організуються на її основі в даний момент часу (вона
забезпечує універсальність системи, характеризуючи її потенційні можливості),
а функціональна структура СВВ відбиває конкретне призначення системи.
3.
Доцільність самостійного розгляду фізичної і функціональноїструктур яскраво проявилася при проектуванні сучасних ЕОМ. Відмінна
риса у фізичній структурі - поява магістрально-модульного принципу,
а у функціональній структурі - поява каналу.
Магістрально-модульний
апаратні
і
програмні
засоби,
принцип,
забезпечив
розповсюджений
сумісність
модулів
на
на
конструктивному, електричному, функціональному і програмному рівнях;
однорідність структури; гнучкість у виборі апаратних і програмних
модулів;
можливість
розширення
структури;
модернізації
модулів
і
постійного удосконалювання системи в цілому. Утіленням магістральномодульного
принципу
на
апаратному
рівні
з'явилося
створення
інтерфейсу, а на програмному рівні - супервізора вводу-виводу.
4.
Функціональна структура СВВ визначається на стадії проектуваннявсієї системи, у якій будуть використовуватися один або кілька
процесорів. Однак ряд функцій, покладених на СВВ, є загальними.
Це послужило передумовою до введення у функціональну структуру
будь-якої сучасної ЕОМ каналу, що реалізує:
• автономну роботу з власної програми;
• вибірку зовнішнього пристрою (ЗП) у селекторному і
мультиплексному режимах;
• узгодження форматів даних у процесі обміну;
• дозвіл конфліктних ситуацій (реалізація пріоритетної системи);
• розподіл даних у пам'яті при введенні і збір даних з пам'яті при
виводі.
Фізична реалізація перерахованих і ряду інших спеціальних функцій
каналу покладається на основний або спеціально виділений для цих
цілей процесор (пристрій), інтерфейс і керування зовнішнім
пристроєм (КЗП)
5. 1.2. Конфігурація систем вводу-виводу
Сполучною ланкою будь-якої обчислювальної або керуючої системи єітнерфейс.
Інтерфейс – це сукупність апаратних, і програмних засобів, що
реалізують стандарт по організації зв'язків у магістрально-модульній
системі, що забезпечує функціональну, електричну і конструктивну
сумісність модулів. Крім основного інтерфейсу вводу-виводу в ЕОМ є ще:
•інтерфейс оперативної пам'яті;
•внутрішні інтерфейси спеціального призначення (в деяких випадках);
Наступною по значимості ланкою СВВ є реалізація прямого доступу в
пам'ять - найкоротшого шляху вводу-виводу блоків даних без порушення
роботи процесора. Саме з його допомогою СВВ працює автономно по
заздалегідь підготовленій і записаній в пам'ять програмі вводу-виводу.
Підготовка й ініціювання прямого доступу в пам'ять можуть здійснюватися
процесором або ЗП.
6. Рис.1
У СВВ можна виділити дві групи фізичних структур, щовідрізняються реалізацією зв'язків:
1. СВВ, що містять автономні апаратні і програмні засоби каналу;
2. СВВ, що містять розосереджені апаратні і програмні засоби
каналу.
Розглянемо фізичну структуру системи вводу-виводу з автономними
каналами і трьома інтерфейсами (рис.1).
Ця структура побудована з
використанням інтерфейсу ЗП,
інтерфейсу пам'яті і внутрішнього
інтерфейсу процесора.
Рис.1
7.
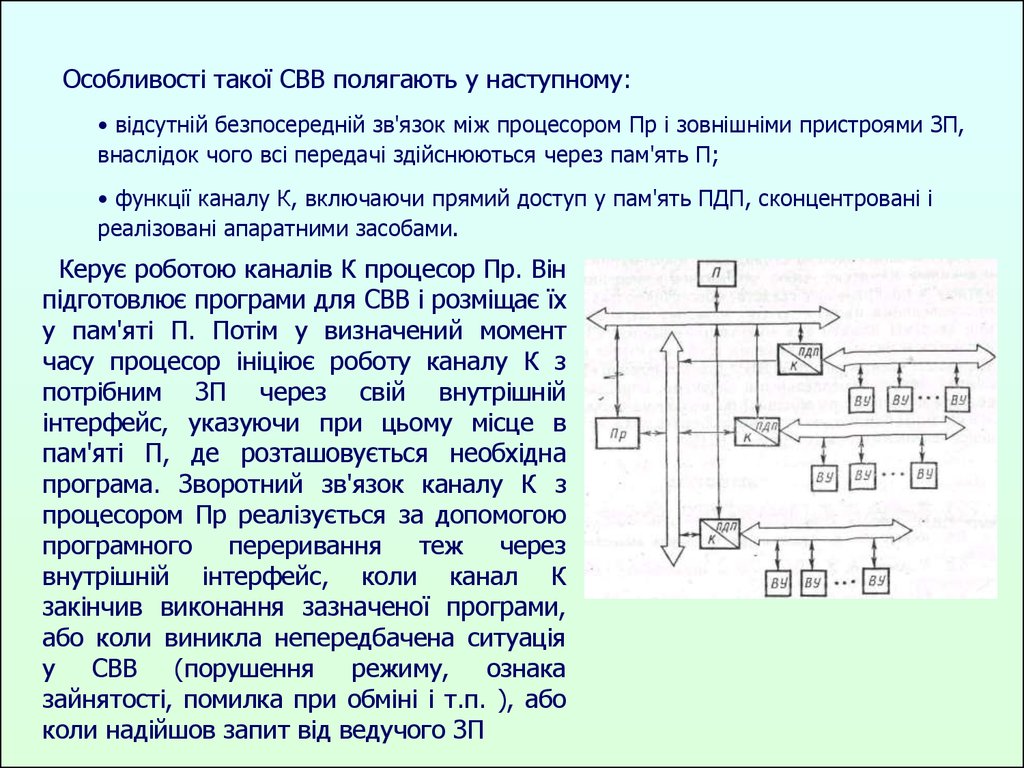
Особливості такої СВВ полягають у наступному:• відсутній безпосередній зв'язок між процесором Пр і зовнішніми пристроями ЗП,
внаслідок чого всі передачі здійснюються через пам'ять П;
• функції каналу К, включаючи прямий доступ у пам'ять ПДП, сконцентровані і
реалізовані апаратними засобами.
Керує роботою каналів К процесор Пр. Він
підготовлює програми для СВВ і розміщає їх
у пам'яті П. Потім у визначений момент
часу процесор ініціює роботу каналу К з
потрібним ЗП через свій внутрішній
інтерфейс, указуючи при цьому місце в
пам'яті П, де розташовується необхідна
програма. Зворотний зв'язок каналу К з
процесором Пр реалізується за допомогою
програмного переривання теж через
внутрішній інтерфейс, коли канал К
закінчив виконання зазначеної програми,
або коли виникла непередбачена ситуація
у СВВ (порушення режиму, ознака
зайнятості, помилка при обміні і т.п. ), або
коли надійшов запит від ведучого ЗП
8.
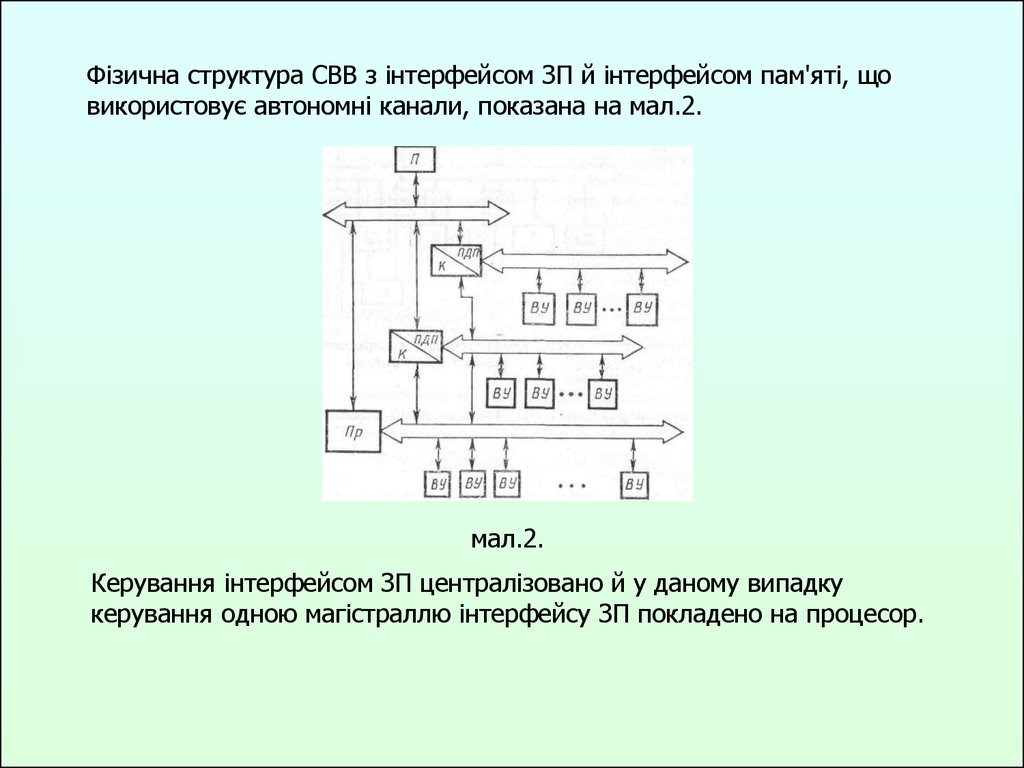
Фізична структура СВВ з інтерфейсом ЗП й інтерфейсом пам'яті, щовикористовує автономні канали, показана на мал.2.
мал.2.
Керування інтерфейсом ЗП централізовано й у даному випадку
керування одною магістраллю інтерфейсу ЗП покладено на процесор.
9.
Особливості даної фізичної структури СВВ полягають в наступному:•наявність двох шляхів зв'язку процесора Пр і зовнішніх пристроїв ЗП - через
пам'ять П з використанням прямого доступу в пам'ять(ПДП);
•ПДП і безпосереднім програмний із заняттям апаратних засобів і часу процесора
Пр;
•необхідність поділу ЗП на дві групи у залежності від обміну;
•якщо обмін здійснюється блоками даних, то ЗП підключаються до каналу К, якщо
обмін здійснюється окремими словами, то ЗП підключаються до процесора Пр;
У даному випадку остання відмінна риса підкреслює відсутність
однозначної відповідності між функціональним елементом - каналом і
фізичним елементом - процесором, що тільки протягом деякого часу
виконує функції каналу.
10.
Порівнюючи структури СВВ, показаних на мал. 6.1 і 6.2, слід зазначити, щоструктура СВВ, зображена на мал. 6.2, відрізняється більшою гнучкістю,
більш швидкою реакцією на зміни, що відбуваються у ЗП, підключених до
магістралі процесора, і, відповідно, кращими можливостями для роботи в
реальному масштабі часу. Однак структура, представлена на мал. 6.1,
володіє більшою обчислювальною потужністю за рахунок того, що її
процесор не бере участь в операціях вводу-виводу, а тільки ініціює роботу
каналів і контролює дії СВВ.
Мал.6.1(Фізична структура системи
вводу-виводу з автономними каналами
і трьома інтерфейсами)
Мал.6.2(Фізична структура СВВ з інтерфейсом
ЗП й інтерфейсом пам'яті, що використовує
автономні канали)
11.
СВВ із розосередженим каналом.Особливості даної фізичної структури СВВ полягають у наступному:
•загальна магістраль інтерфейсу для всіх
зовнішніх пристроїв ЗП;
•керування інтерфейсом і виконання практично
усіх функцій каналу, за винятком передачі
блоків даних, покладені на процесор Пр;
•виділена група ЗП, для яких характерний
режим передачі блоків даних у темпі,
близькому до циклу пам'яті П;
•в КЗП виділеної групи реалізована можливість
прямого доступу в пам'ять ПДП через
інтерфейс пам'яті П.
Рис.3. Система вводу-виводу з
розосередженим каналом і
двома інтерфейсами
12.
Висновок: Розглянута структура СВВ добре пристосована для роботи всистемах автоматизації наукових досліджень, АСУ технологічними процесами й
інформаційно-вимірювальними
системами,
коли
потрібні
висока
продуктивність, гнучкість і реальний масштаб часу.
Система вводу-виводу з розосередженим каналом і єдиним інтерфейсом
13.
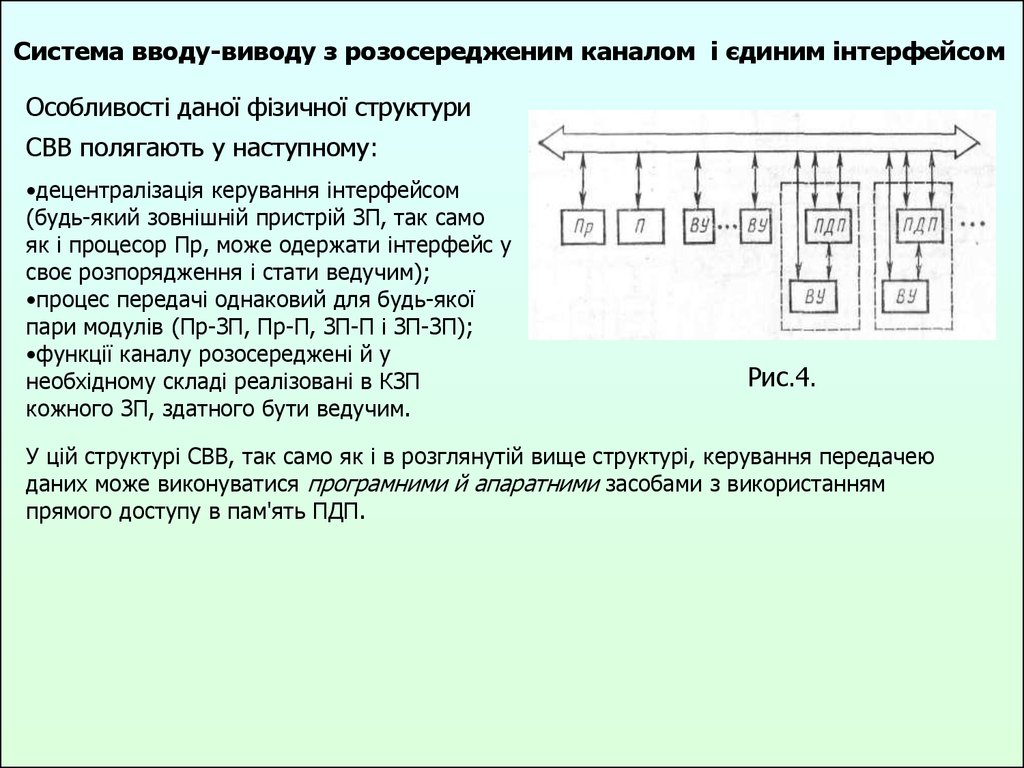
Система вводу-виводу з розосередженим каналом і єдиним інтерфейсомОсобливості даної фізичної структури
СВВ полягають у наступному:
•децентралізація керування інтерфейсом
(будь-який зовнішній пристрій ЗП, так само
як і процесор Пр, може одержати інтерфейс у
своє розпорядження і стати ведучим);
•процес передачі однаковий для будь-якої
пари модулів (Пр-ЗП, Пр-П, ЗП-П і ЗП-ЗП);
•функції каналу розосереджені й у
необхідному складі реалізовані в КЗП
кожного ЗП, здатного бути ведучим.
Рис.4.
У цій структурі СВВ, так само як і в розглянутій вище структурі, керування передачею
даних може виконуватися програмними й апаратними засобами з використанням
прямого доступу в пам'ять ПДП.
14.
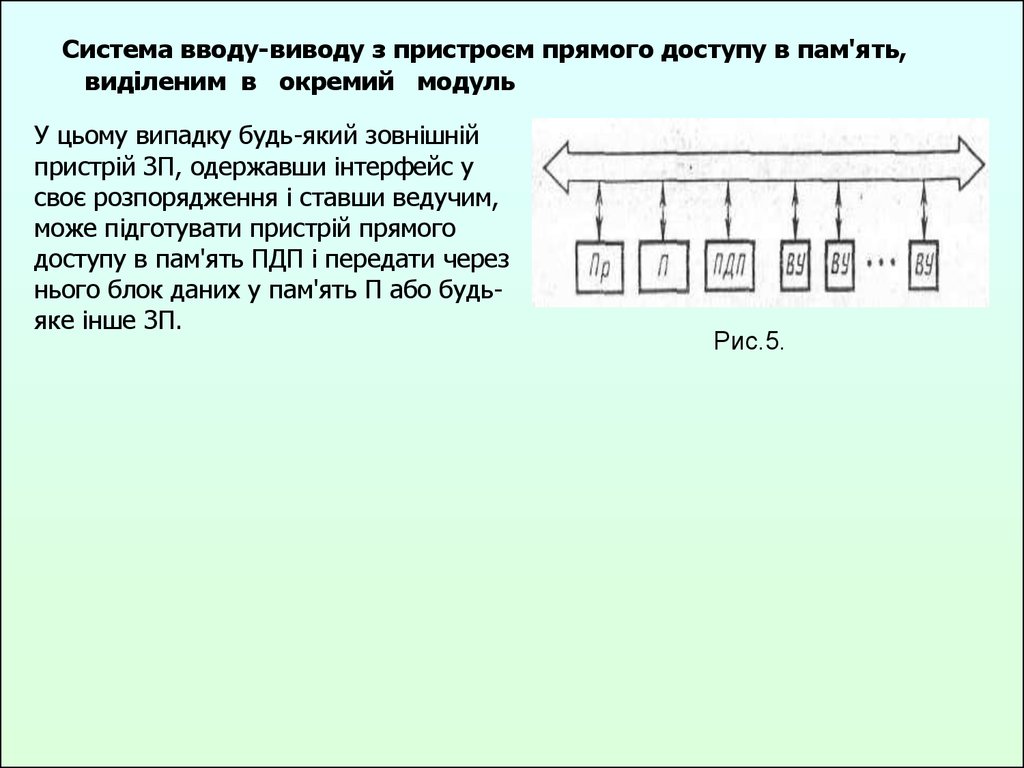
Система вводу-виводу з пристроєм прямого доступу в пам'ять,виділеним в окремий модуль
У цьому випадку будь-який зовнішній
пристрій ЗП, одержавши інтерфейс у
своє розпорядження і ставши ведучим,
може підготувати пристрій прямого
доступу в пам'ять ПДП і передати через
нього блок даних у пам'ять П або будьяке інше ЗП.
Рис.5.
15.
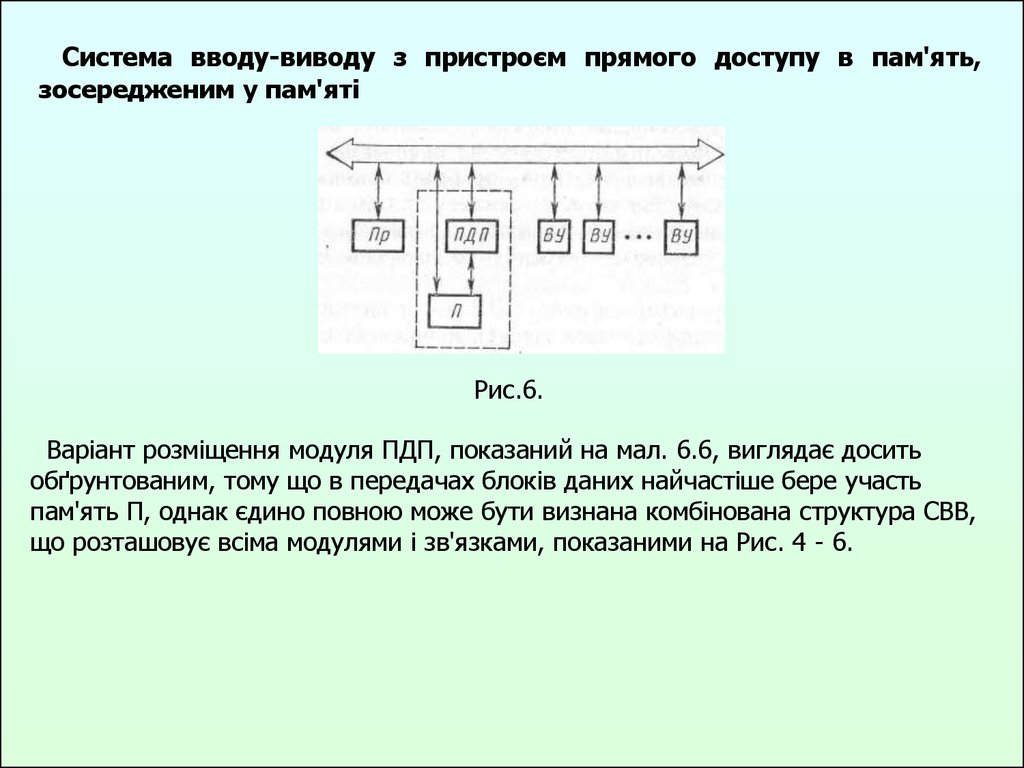
Система вводу-виводу з пристроєм прямого доступу в пам'ять,зосередженим у пам'яті
Рис.6.
Варіант розміщення модуля ПДП, показаний на мал. 6.6, виглядає досить
обґрунтованим, тому що в передачах блоків даних найчастіше бере участь
пам'ять П, однак єдино повною може бути визнана комбінована структура СВВ,
що розташовує всіма модулями і зв'язками, показаними на Рис. 4 - 6.
16.
Висновок: Відзначимо, що ефективність фізичних структур СВВ у різнихумовах застосування залежить від кількості рівнів керування ЗП,
організації системи пріоритетів, особливостей використовуваних
інтерфейсів і наявних можливостей по розширенню й об'єднанню
декількох СВВ у єдиний комплекс.
17.
1.3 Функціональні параметри інтерфейсуПо інтерфейсі здійснюється передача даних, команд і адрес модулів.
Система будь-якої конфігурації, побудована по магістрально модульному
принципі, містить деякий центральний модуль керування обміном даних,
що називається контролером. Як контролер найчастіше
використовується процесор або автономний спеціалізований блок, а в
деяких інтерфейсах функції контролера можуть бути передані будь-якому
здатному керувати модулеві на визначений час. З огляду на таку побудову
системи, можна виділити режими обміну даними:
1. між контролером і будь-яким модулем (К-М);
2. між двома модулями (М-М).
18.
Кількість шин у магістралі інтерфейсу, визначає його складність іціну фізичних елементів зв'язку, а також - його пропускну здатність. Відомі
інтерфейси, що використовують одну шину, і інтерфейси, що мають більш
100 шин. Тому проектування інтерфейсів зводиться до рішення задачі
забезпечення необхідної пропускної здатності при мінімальній
кількості шин у магістралі.
Розрядність шин даних зіставляється з розрядністю переданих слів.
Упакування або розчленовування цих слів визначають коефіцієнт
використання шин даних і, отже, темп обміну.
Кількість адрес зовнішніх пристроїв визначає максимальну
конфігурацію СВВ у рамках одного інтерфейсу.
Кількість команд інтерфейсу визначає кількість операцій, що
необхідні для реалізації обміну даними.
Функціональні можливості інтерфейсу - додаткові команди, що
забезпечують виконання дій над даними в процесі їхньої передачі без
залучення програмних засобів процесора.
Час передачі даних, будучи фізичним параметром, залежить від
конструкції і електричних особливостей інтерфейсу, а також залежить від
того, як здійснюється передача даних (окремими словами або блоками).
19.
Передача даних між двома модулями (М-М) реалізується такимишляхами:
1. через процесор (контролер) М-К-М у централізованих інтерфейсах
[при цьому затрачається багато часу на підготовку і (або) завершення
передачі, особливо у випадках, коли обмін ведеться окремими
словами];
2. при передачі блоками даних і використанні буферної пам'яті, що лише
вдвічі збільшує час передачі в порівнянні з обміном К-М;
Прямий доступ у пам'ять передбачений у всіх інтерфейсах.
Висновок: Проектувальників СВВ можуть цікавити різні оцінки, що
залежать від усіх перерахованих вище функціональних параметрів
інтерфейсів, але тільки всі значення кожної оцінки дадуть повне
представлення про можливості даного інтерфейсу і дозволять
порівняти його з іншими.
20.
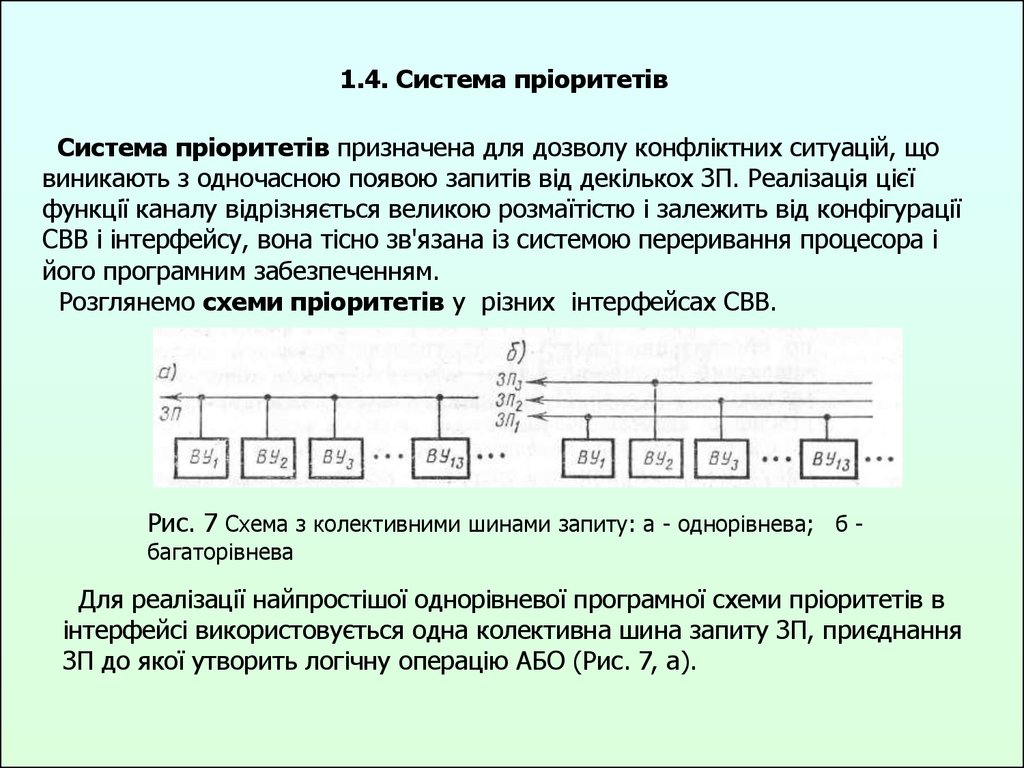
1.4. Система пріоритетівСистема пріоритетів призначена для дозволу конфліктних ситуацій, що
виникають з одночасною появою запитів від декількох ЗП. Реалізація цієї
функції каналу відрізняється великою розмаїтістю і залежить від конфігурації
СВВ і інтерфейсу, вона тісно зв'язана із системою переривання процесора і
його програмним забезпеченням.
Розглянемо схеми пріоритетів у різних інтерфейсах СВВ.
Рис. 7 Схема з колективними шинами запиту: а - однорівнева; б багаторівнева
Для реалізації найпростішої однорівневої програмної схеми пріоритетів в
інтерфейсі використовується одна колективна шина запиту ЗП, приєднання
ЗП до якої утворить логічну операцію АБО (Рис. 7, а).
21.
Після одержання сигналу запиту переривання з інтерфейсу, що може бутинаслідком одночасного запиту з декількох ЗП, процесор перериває
виконання основної програми і переходить до програми обробки
переривання по даному сигналу. На початку виконання підпрограми
процесор забороняє подальше переривання і приступає до пошуку ЗП з
вищим пріоритетом, що запросив переривання. Для цього процесор через
магістралі інтерфейсу, призначені для програмного обміну послідовно, у
порядку встановленого пріоритету опитує ЗП починаючи з пристрою, що
має найвищий пріоритет. Пошук продовжується доти, доки не зустрінеться
ЗП, у якому зафіксований сигнал запиту переривання ЗП. Далі процесор
приступає до виконання програми обслуговування зворотнього ЗП і може
дозволити подальші переривання, якщо вони передбачені. Якщо
багаторазові переривання не передбачені, процесор дозволяє подальші
переривання тільки після повернення до основної програми.
Рис. 7а.Схема з колективною шино запиту: однорівнева;
22.
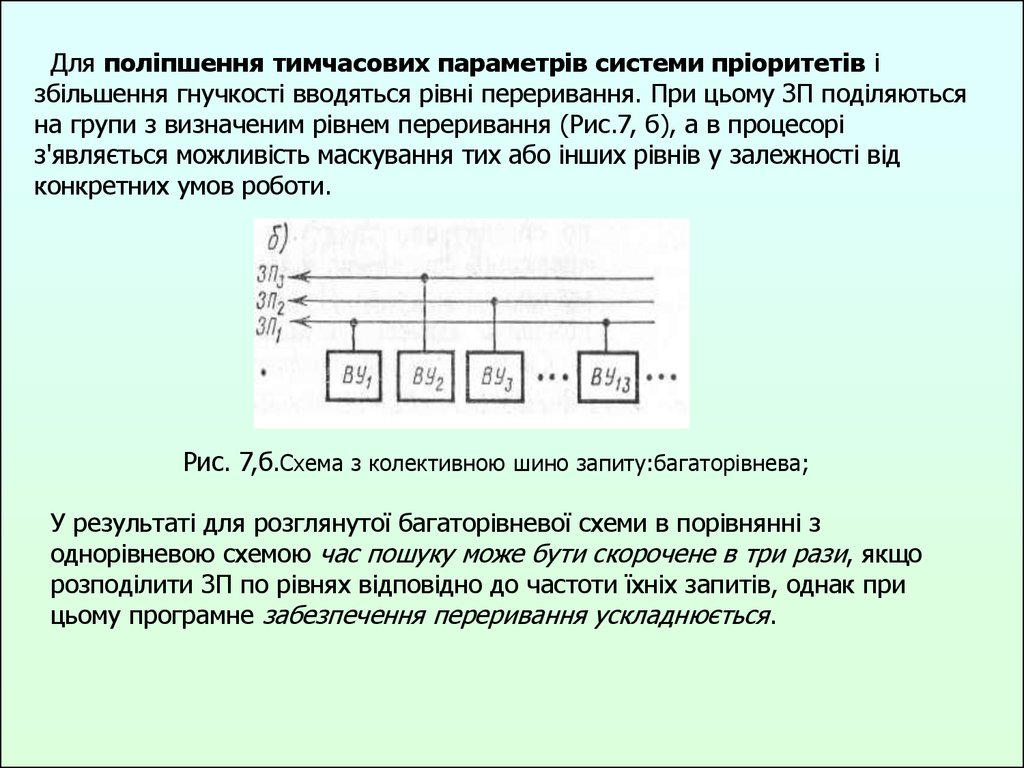
Для поліпшення тимчасових параметрів системи пріоритетів ізбільшення гнучкості вводяться рівні переривання. При цьому ЗП поділяються
на групи з визначеним рівнем переривання (Рис.7, б), а в процесорі
з'являється можливість маскування тих або інших рівнів у залежності від
конкретних умов роботи.
Рис. 7,б.Схема з колективною шино запиту:багаторівнева;
У результаті для розглянутої багаторівневої схеми в порівнянні з
однорівневою схемою час пошуку може бути скорочене в три рази, якщо
розподілити ЗП по рівнях відповідно до частоти їхніх запитів, однак при
цьому програмне забезпечення переривання ускладнюється.
23.
Загальним недоліком описаних систем пріоритетів є програмнийпослідовний пошук, що істотно обмежує можливості їхнього використання в
системах, що працюють у реальному масштабі часу. Тому процес пошуку
часто виконується в самому інтерфейсі, для цього вводиться спеціальна
послідовна шина, що випливає від ЗП найвищого пріоритету до наступного
один по одному ЗП і т.д. до останнього ЗП, що має самий нижчий
пріоритет. (Рис. 8, а).
Рис. 8 Схеми з твердою системою пріоритетів і послідовною шиною дозволу
Цією шиною на (Рис. 8, а) є шина разу-рішення переривання РП. Процесор
видає сигнал дозволу переривання РП після прийому сигналу запиту
переривання ЗП і відповідної підготовки до взаємодії з ЗП.
24.
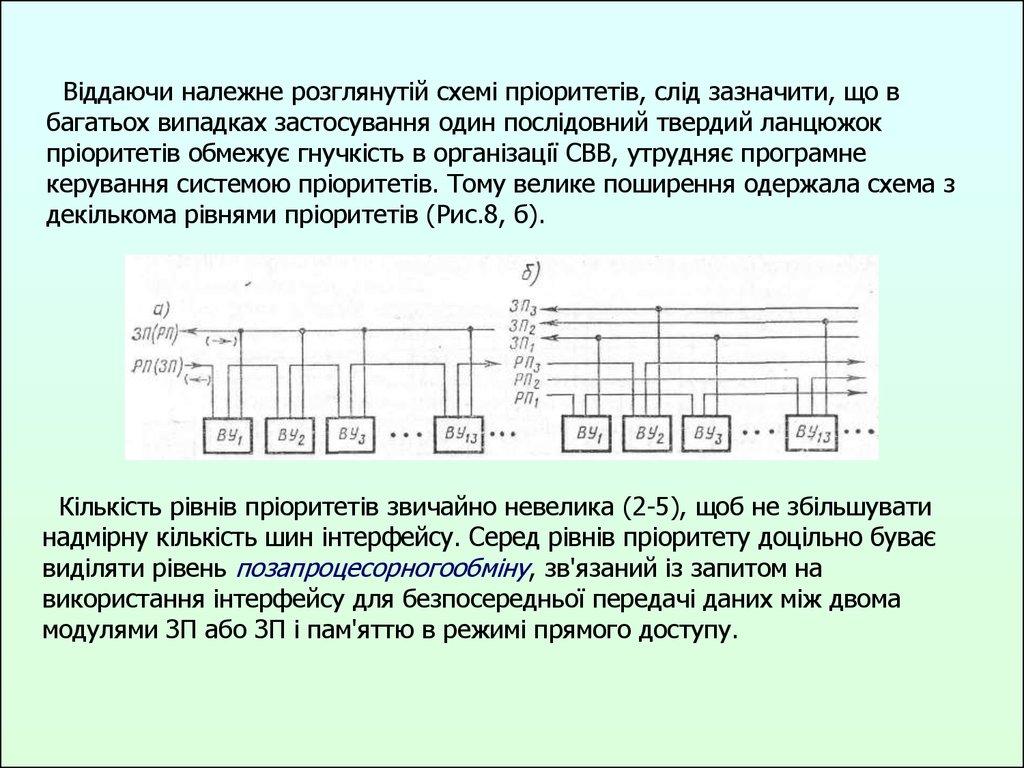
Віддаючи належне розглянутій схемі пріоритетів, слід зазначити, що вбагатьох випадках застосування один послідовний твердий ланцюжок
пріоритетів обмежує гнучкість в організації СВВ, утрудняє програмне
керування системою пріоритетів. Тому велике поширення одержала схема з
декількома рівнями пріоритетів (Рис.8, б).
Кількість рівнів пріоритетів звичайно невелика (2-5), щоб не збільшувати
надмірну кількість шин інтерфейсу. Серед рівнів пріоритету доцільно буває
виділяти рівень позапроцесорногообміну, зв'язаний із запитом на
використання інтерфейсу для безпосередньої передачі даних між двома
модулями ЗП або ЗП і пам'яттю в режимі прямого доступу.
25.
Функцію послідовної шини інтерфейсу, що реалізує ланцюжок пріоритетів,у деяких випадках можуть виконувати колективні шини даних Д (Рис.9, а).
Для цього шини даних Д повинні бути вільні від передач повідомлень під час
установлення взаємного зв'язку з процесором і кількість ЗП обмежена
кількістю шин Д.
Рис. 9 . Схеми пріоритетів з індивідуальними шинами для кожного ЗП:
а - із загальними шинами даних; б - зі спеціальними шинами даних
Робота розглянутої схеми пріоритетів ґрунтується на тім, що кожному ЗП
виділяється визначена шина Д в залежності від пріоритету. Сигнал на цій
шині пристрій може установити тільки у випадку, коли відсутні сигнали на
шинах Д ЗП вищого пріоритету стосовно
даного. Для ініціювання
програмного переривання на колективній шині виставляється сигнал запиту
переривання ЗП від одного або декількох одночасно діючих ЗП.
26.
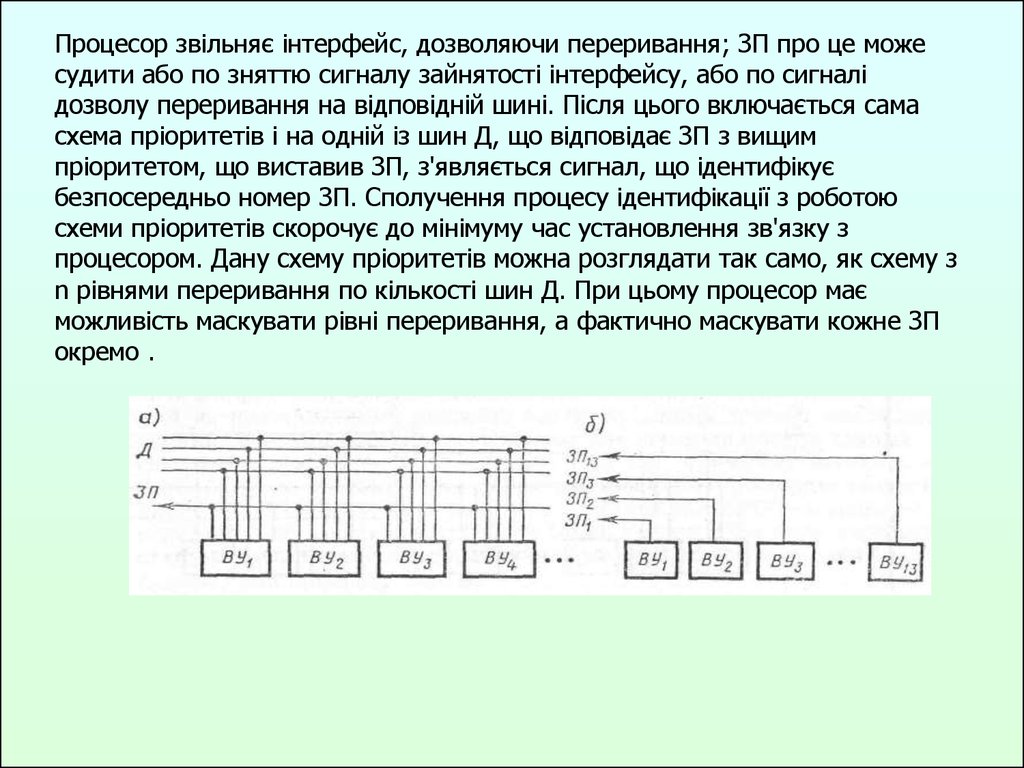
Процесор звільняє інтерфейс, дозволяючи переривання; ЗП про це можесудити або по зняттю сигналу зайнятості інтерфейсу, або по сигналі
дозволу переривання на відповідній шині. Після цього включається сама
схема пріоритетів і на одній із шин Д, що відповідає ЗП з вищим
пріоритетом, що виставив ЗП, з'являється сигнал, що ідентифікує
безпосередньо номер ЗП. Сполучення процесу ідентифікації з роботою
схеми пріоритетів скорочує до мінімуму час установлення зв'язку з
процесором. Дану схему пріоритетів можна розглядати так само, як схему з
n рівнями переривання по кількості шин Д. При цьому процесор має
можливість маскувати рівні переривання, а фактично маскувати кожне ЗП
окремо .
27.
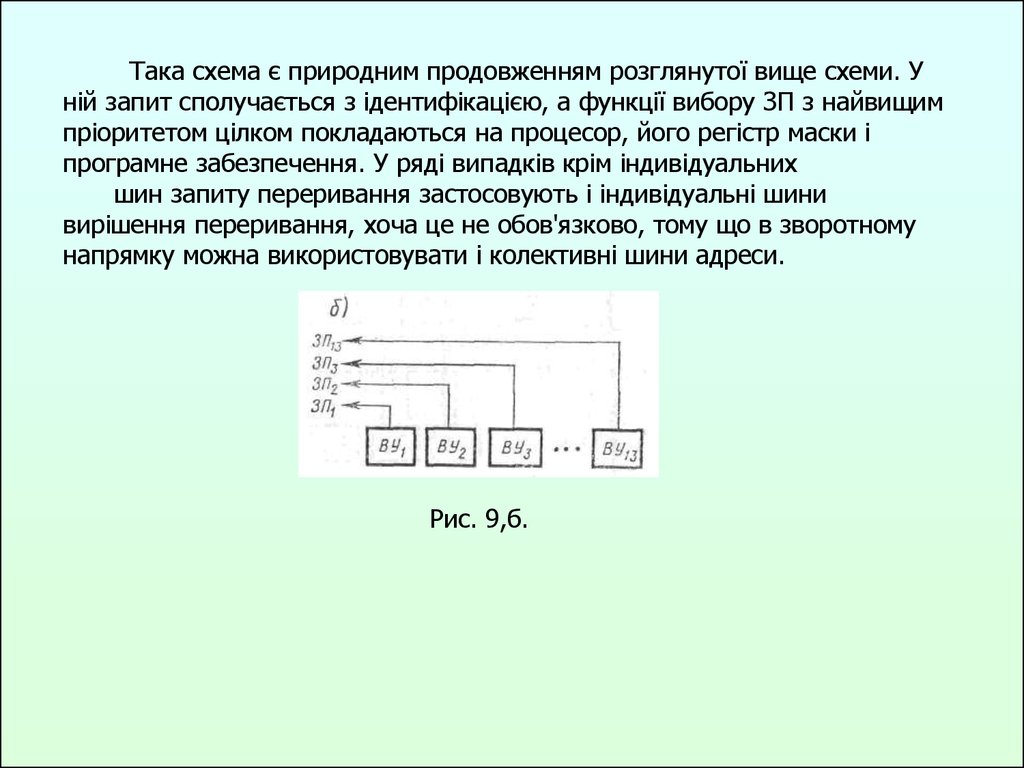
Така схема є природним продовженням розглянутої вище схеми. Уній запит сполучається з ідентифікацією, а функції вибору ЗП з найвищим
пріоритетом цілком покладаються на процесор, його регістр маски і
програмне забезпечення. У ряді випадків крім індивідуальних
шин запиту переривання застосовують і індивідуальні шини
вирішення переривання, хоча це не обов'язково, тому що в зворотному
напрямку можна використовувати і колективні шини адреси.
Рис. 9,б.
28.
Висновок: відзначимо, що усі розглянуті системи пріоритетівшироко
використовуються в різних інтерфейсах вводу-виводу. Неможливо виділити
з усіх розглянутих одну, котра була б кращою. Організація системи
пріоритетів тісно зв'язана з організацією процесора, від неї залежить
складність керування ЗП, і, нарешті, вона повинна відповідати вимогам,
пропонованим до усієї СВВ у цілому. Визначення системи пріоритетів для
конкретного класу СВВ - один з вирішальних факторів у виборі інтерфейсу
або проектуванні нового разом з интерфейсною частиною процесора і його
апаратом переривання.
29.
1.5. Інтерфейсні пристроїОсновною задачею будь-якого інтерфейсного пристрою є сполучення
інтерфесу з магістраллю.
За призначенням інтерфейсні пристрої поділяються на:
1. Інтерфейсні пристрої звязку магістралей однорідних
систем;
2. Інтерфейсні пристрої узгодження неоднорідних
систем(адаптери);
3. Інтерфейсні пристрої керування ЗП;
Интерфейсні пристрої зв'язку магістралей однорідних систем,
побудованих на одному інтерфейсі, вирішують проблему створення
багатопроцесорного комплексу й об'єднання всіх периферійних пристроїв
у єдину СВВ.
Адаптери
дозволяють будувати неоднорідні по своєму складі
багатопроцесорні системи і здійснювати сполучення інтерфейсів СВВ з
апаратурою дистанційної передачі даних.
30.
Інтерфейсні пристрої керування ЗП призначені для упізнання власноїадреси ЗП, прийому і виконання команд інтерфейсу, узгодження форматів
даних ЗП й інтерфейсу, контролю передач, прийому керуючих слів,
формування слів стану і, якщо необхідно для реалізації процесу прямого
доступу в пам'ять.
Інтерфейсні пристрої керування ЗП поділяються на:
- пристрої програмного обміну;
- апаратного обміну обміну;
31.
1.2. Основні етапи проектування систем вводу-виводуОсновні зусилля спрямовані на розробку інтерфейсів і інтерфейсних
пристроїв не тільки тому, що зв'язок визначає пропускну здатність,
гнучкість і можливості системи в цілому, але також і тому, що саме
інтерфейс є самою консервативною ланкою системи: так, інтерфейс
залишається незмінним, коли з'являються нові моделі в сімействі
процесорів або виникає нова технологія виробництва елементів, коли
використовуються нові принципи побудови ЗП. Інтерфейс повинний
залишатися колишнім, щоб забезпечити сумісність СВВ, наступність у
їхньому розвитку і можливість розширення.
Виділяють три основні етапи проектування інтерфейсів:
На першому етапі може бути дві ситуації: інтерфейс заданий
заздалегідь або інтерфейс не визначений.
При заданому інтерфейсі перед розробником стоїть задача
детального вивчення всіх його можливостей, наявних інтерфейсних
пристроїв, фізичних обмежень, протоколів обміну і розрахунок
тимчасових витрат процесора.
Якщо інтерфейс заздалегідь не визначений (що буває рідко),
задача істотно ускладнюється. Порівняльний аналіз існуючих інтерфейсів
повинний вироблятися в конкретних умовах, коли відомі хоча б
приблизно модель СВВ, потоки повідомлень, припустимі затримки
обслуговування і враховані можливості розширення системи.
32.
На другому етапі розробляється модель СВВ з урахуванням усіхможливостей інтерфейсу. При цьому визначається склад ЗП, вибираються
конкретні пристрої з необхідними технічними характеристиками і
розробляється кілька варіантів структурної організації СВВ.
На третьому етапі, зв'язаному з проектуванням спеціалізованих ЗП,
виконується проектування автомата з урахуванням можливостей елементної
бази. Проектування спеціалізованого ЗП вирішується в кожнім конкретному
випадку по-своєму.
33.
1.3.1. Інтерфейс UnіbusІнтерфейс Unіbus - загальний інтерфейс пам'яті, процесора і всіх
периферійних пристроїв. Адреси, дані, команди і слова стану ЗП
передаються по 56 лініям. Принцип зв'язку однаковий для будь-якого
модуля, що підключається до магістралі інтерфейсу. Процесор для з'єднання
з пам'яттю використовує ті ж сигнали, що і для з'єднання з ЗП. Аналогічно,
ЗП використовує ті самі сигнали для зв'язку з процесором, пам'яттю й
іншими ЗП.
34.
Характеристики інтерфейсу UnibusДаний інтерфейс через відсутність рівнів командного керування
глибоко проникає в структуру процесора, що забезпечує високу
динамічність СВВ.
Будь-який ЗП, так само як і процесор, може одержати інтерфейс у своє
розпорядження і стати ведучим модулем магістралі на визначений
час.
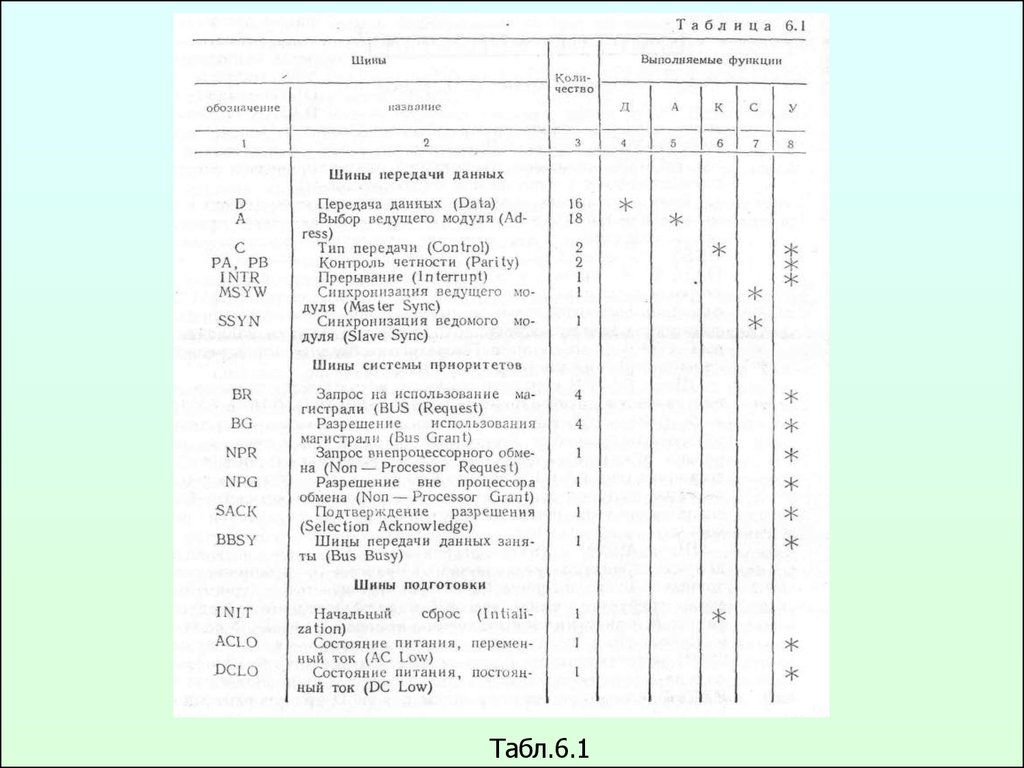
Склад шин інтерфейсу unibus(табл.6.1) :
1. Шини передачі даних;
2. Шини системи пріорітетів;
3. Шини підготовки;
35.
Табл.6.136.
Усі шини, за винятком шин BG і NPG, двонаправлені, тому що ведучі івідомий модулі можуть бути в будь-якій частині магістралі. Тільки арбітр А
має строго визначене місце (мал. 6.10), і тому сигнал дозволу на шинах BG
і NPG спрямований від нього.
Рис. 6.10. Інтерфейс Unіbus
У передачі даних бере участь 41 шина магістралі, керування якими
покладається на ведучий модуль.
Шини даних D15 - D00 використовуються для передачі слів між ведучими і
відомим модулями. Обмін може здійснюватися 16-розрядними словами або
байтами (мал. 6.11, а).
Адресні шини А17 - А00 використовуються ведучим модулем для вибору
відомого. Модуль, у якого власна адреса збігається з указаним на адресних
шинах, відгукується як відомий. У форматі адреси (мал. 6.11, б) 17 розрядів
визначають осередок з 16-розрядним словом.
37.
Рис. 6.11. Форматиданих (а) і адрес (б)
Шини З0, З1, що характеризують тип передачі, призначені для
формування чотирьох команд ведучого модуля.
Шини РА, РВ контролю парності використовуються відомим модулем
для вказівки помилки при виконанні команд DATІ/Р в ЗП [(РА) = = 0,
(РВ) = 1)]; рівність нулеві обох сигналів свідчить про відсутність
помилки.
Шини MSYN і SSYN синхронізації ведучих і відомого модулів
забезпечують реалізацію асинхронного принципу передачі даних.
Шина ІNTR призначена для реалізації переривання.
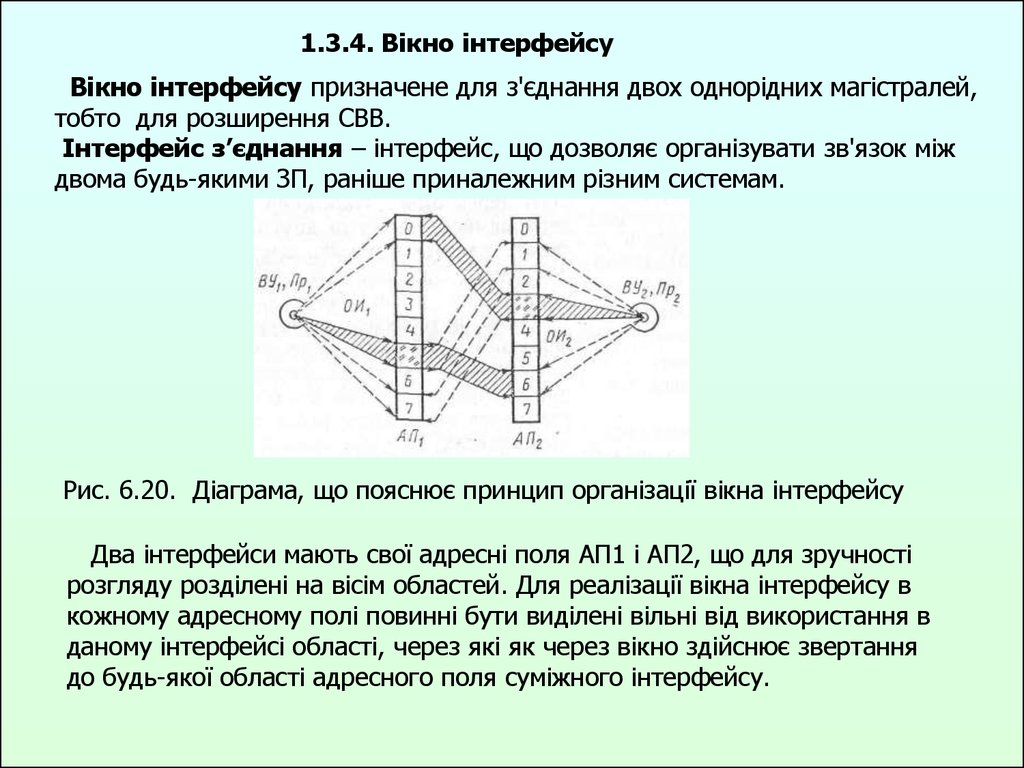
38.
1.3.4. Вікно інтерфейсуВікно інтерфейсу призначене для з'єднання двох однорідних магістралей,
тобто для розширення СВВ.
Інтерфейс з’єднання – інтерфейс, що дозволяє організувати зв'язок між
двома будь-якими ЗП, раніше приналежним різним системам.
Рис. 6.20. Діаграма, що пояснює принцип організації вікна інтерфейсу
Два інтерфейси мають свої адресні поля АП1 і АП2, що для зручності
розгляду розділені на вісім областей. Для реалізації вікна інтерфейсу в
кожному адресному полі повинні бути виділені вільні від використання в
даному інтерфейсі області, через які як через вікно здійснює звертання
до будь-якої області адресного поля суміжного інтерфейсу.
39.
В інтерфейсі Unіbus вікно розміщається безпосередньо за останніммодулем пам'яті. Так, у системі з 64К слів пам'яті вікно розміром у 8К слів
займає область від 64К до 72К. При цьому будь-яке звертання до
осередків між 64К и 72К, буде автоматично перетворюватися в доступ до
області 8К адрес в інтерфейсі, що сполучається. Таким чином, у роботі
вікна беруть участь обидва інтерфейси: первинний, на якому доступ був
запитаний, і вторинний, доступ до якого дійсно виконується.
Вікно інтерфейсу приступає до роботи, коли розпізнає адресу, що
лежить в області вікна первинного інтерфейсу. При цьому вікно формує
необхідна фізична адреса і виставляє запит позапроцесорного обміну у
вторинному інтерфейсі. Таким чином, обмін через вікно інтерфейсу
складається з передавальних циклів на обох інтерфейсах, а саме вікно
виступає в ролі відомого на первинному інтерфейсі і ведучого - на
вторинному.
Вікно інтерфейсу відіграє велику роль у побудові
багатопроцесорних однорідних систем усілякого призначення.
могутніх