

 Промышленность
ПромышленностьПохожие презентации:










Транспортные системы
1.
Курсовая работаНа тему: «Транспортные системы»
Дисциплина:
«Проектирование информационных систем в отраслях
транспортно-дорожного комплекса»
Вариант № xx
Выполнил: Студент(ка) группы №4бИТС
Фамилия Имя Отчество
Проверил: Мезенцев К.Н., к.т.н
Москва 202__
2.
Теоретическая часть2
3.
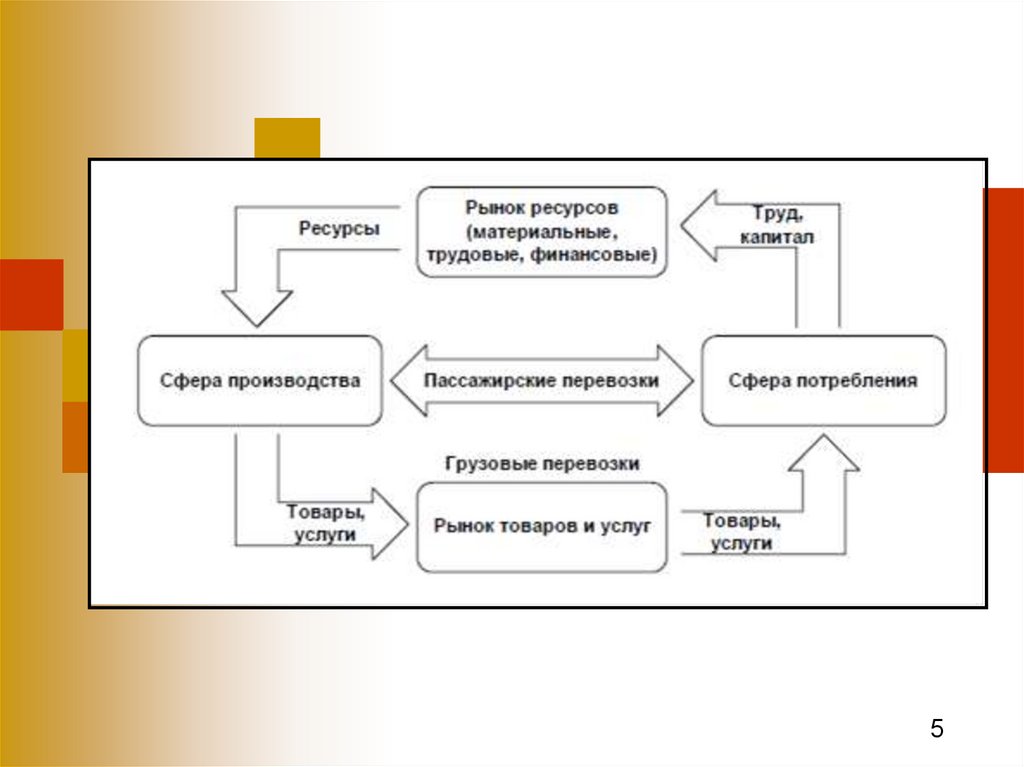
Необходимость снижения себестоимостипродукции даже при самых современных
технологиях производства требует
оптимизации в целом цепочки сырье –
производство – складирование – реализация.
Это вызвало развитие соответствующего
класса систем, которые получили название
логистических.
Помимо главной цели – снижения
себестоимости производства продукции
логистические системы эффективно снимают
основное противоречие между
производством и транспортом – снижение
транспортных издержек в себестоимости
продукции.
3
4.
Качество транспортного обслуживаниянапрямую влияет на полноту реализации
экономических связей внутри страны и за
ее пределами.
Транспортная система определяет
возможность перемещения всех слоев
населения для удовлетворения
производственных и социальных
потребностей.
Географическая и технологическая
доступность транспортных услуг
определяет возможности
территориального развития экономики и
социальной сферы.
4
5.
56.
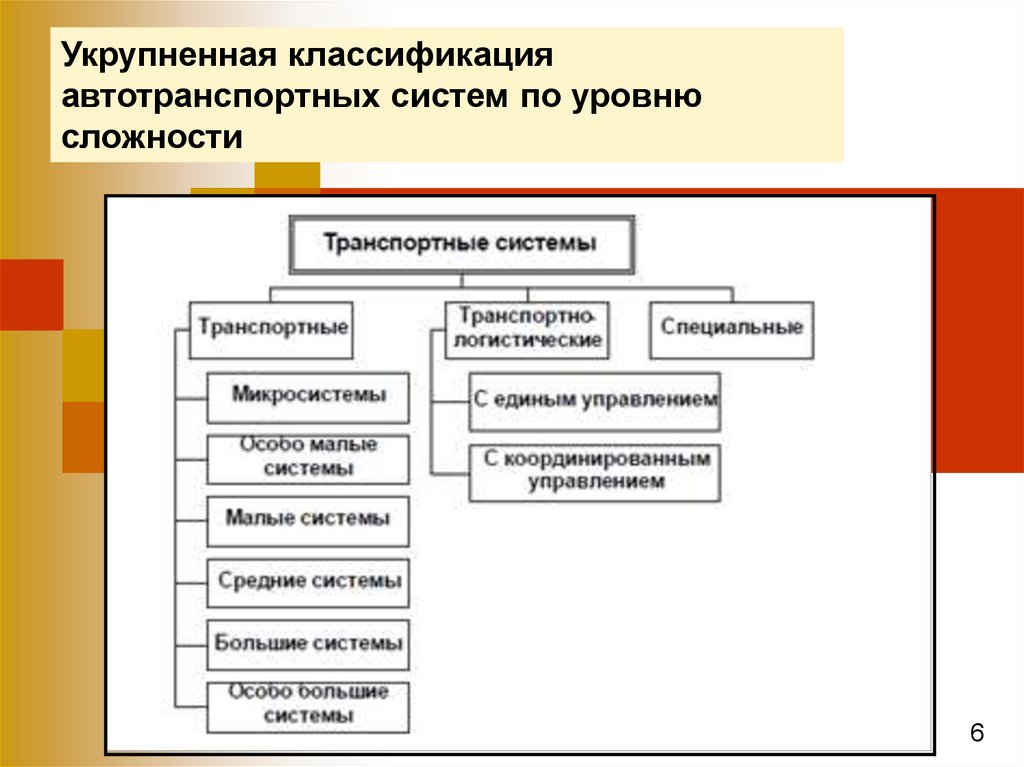
Укрупненная классификацияавтотранспортных систем по уровню
сложности
6
7.
Транспортная система в наиболее общем случаеобразующая связанное целое совокупность:
работников;
транспортных средств;
оборудования;
элементов транспортной
инфраструктуры;
инфраструктуры субъектов
перевозки;
система управления, направленная
на эффективное перемещение
грузов и пассажиров.
7
8.
Инфраструктура – это:физические компоненты транспортной
системы;
они занимают фиксированное
положение в пространстве;
создают транспортную сеть.
транспортная сеть:
сегменты автомобильных и железных
дорог, трубопроводов и т. п.);
узлы (пересечения сегментов дорог,
терминалы различного назначения и т. д.).
8
9.
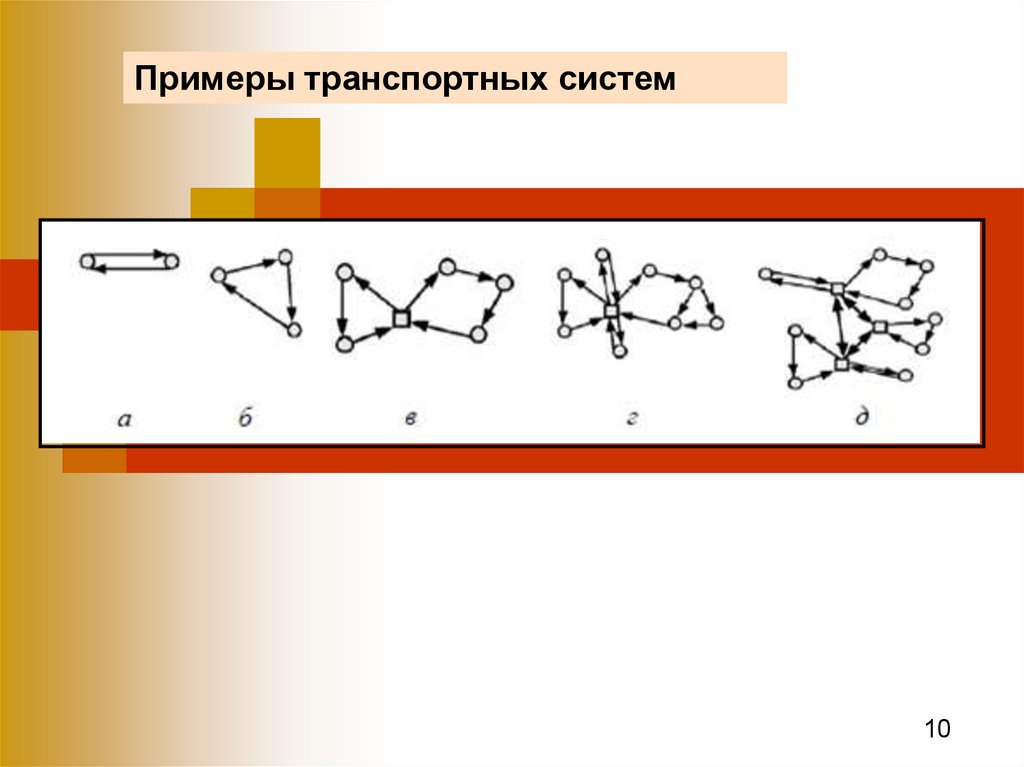
Примеры транспортных систем:а – челночное движение автомобилей в
простейших вариантах организации
транспортного процесса;
б – кольцевое движение автомобилей;
в – развоз или сбор груза;
г – транспортный процесс обслуживания
производственной структуры;
д – транспортный процесс обслуживания
нескольких производственных структур.
9
10.
Примеры транспортных систем10
11.
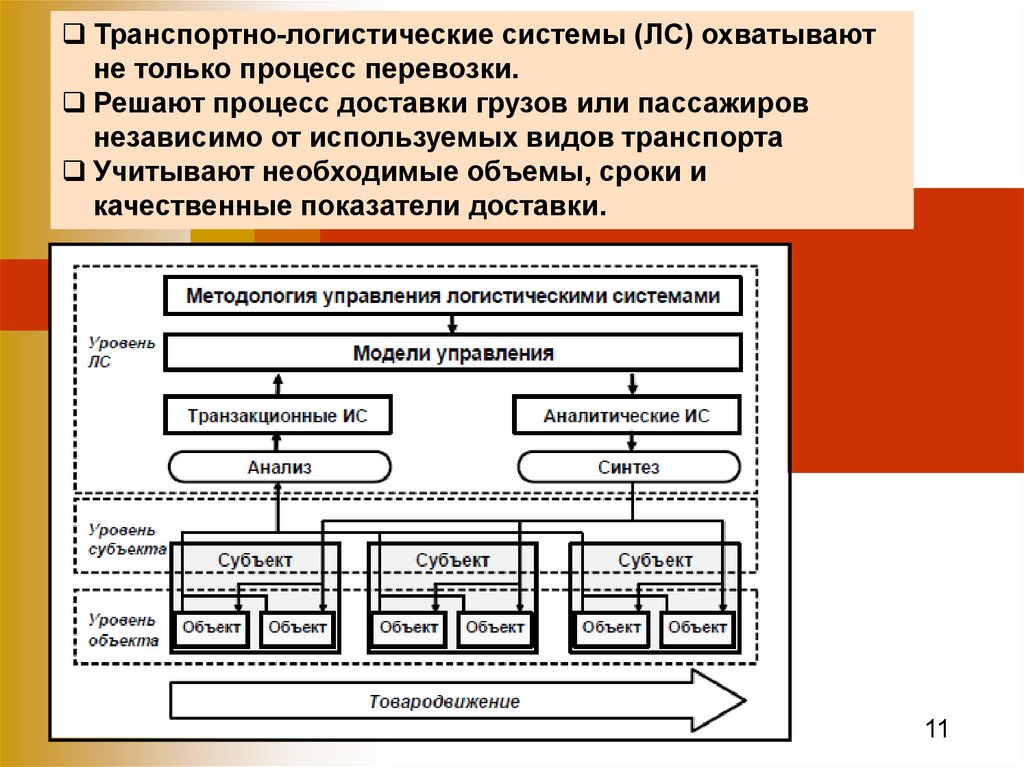
Транспортно-логистические системы (ЛС) охватываютне только процесс перевозки.
Решают процесс доставки грузов или пассажиров
независимо от используемых видов транспорта
Учитывают необходимые объемы, сроки и
качественные показатели доставки.
11
12.
Специальные транспортные системыпредназначены для решения конкретных
задач.
Они возникают при необходимости
перевозки особых грузов или организации
транспортного сообщения в особых
условиях.
Пример: контейнерная транспортная
система, система доставки пассажиров
в аэропорт.
12
13.
Функциональная структуратранспортной системы:
На первом уровне выделяют:
Производственную.
Управляющую системы.
Производственная система:
технологическая – обеспечивает
выполнение основных функций
транспортной системы;
обеспечивающая – выполняет функции,
сопровождающие
транспортные
процессы;
восстанавливающая – выполняет
функции по поддержанию элементов
системы в работоспособном состоянии.
13
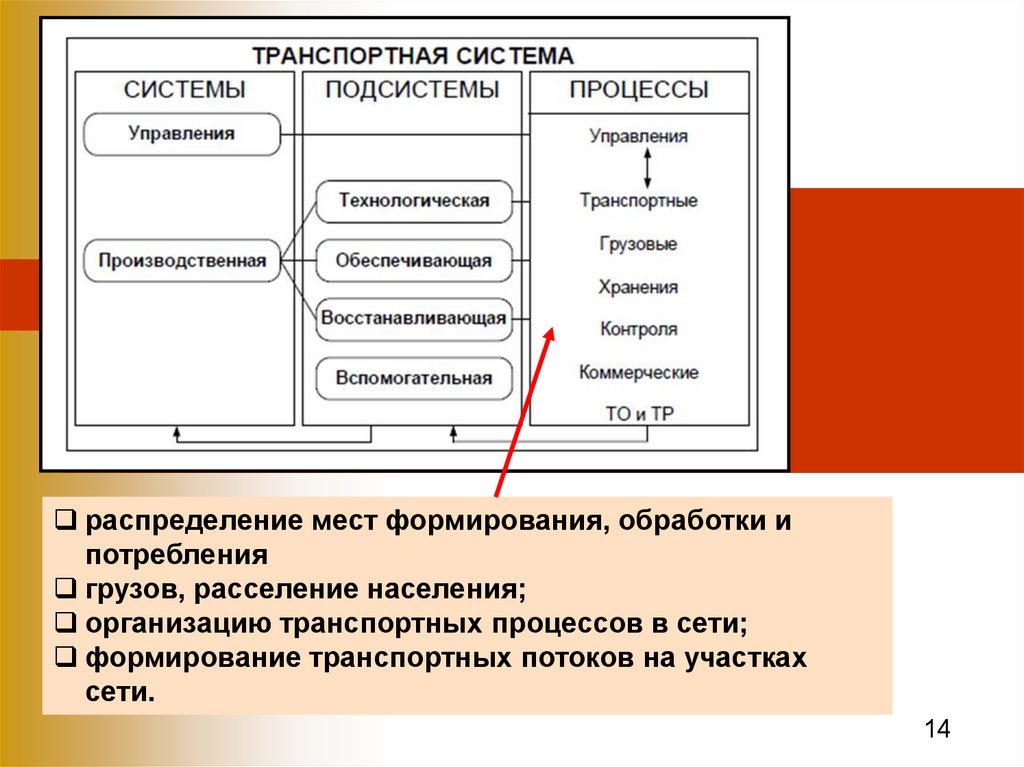
14.
распределение мест формирования, обработки ипотребления
грузов, расселение населения;
организацию транспортных процессов в сети;
формирование транспортных потоков на участках
сети.
14
15.
Уровни временной стабильности исоответствующие им объекты управления
транспортной системы.
15
16.
Практическая часть16
17.
Построить модель работыавтопилота для транспортного
средства (ТРС) движущегося по
трассе с развилкой.
На развилке трасса маркирована
маркерами указателями поворота.
Автопилот сканирует среду по
радиусу R.
Направление движения на развилке
выбирается случайным образом.
Среда разработки: программа мультиагентного
моделирования NetLogo
17
18.
Разметка трассы.Центр – координата 0,0
Цвет полотна – пятен трассы
зеленый.
18
19.
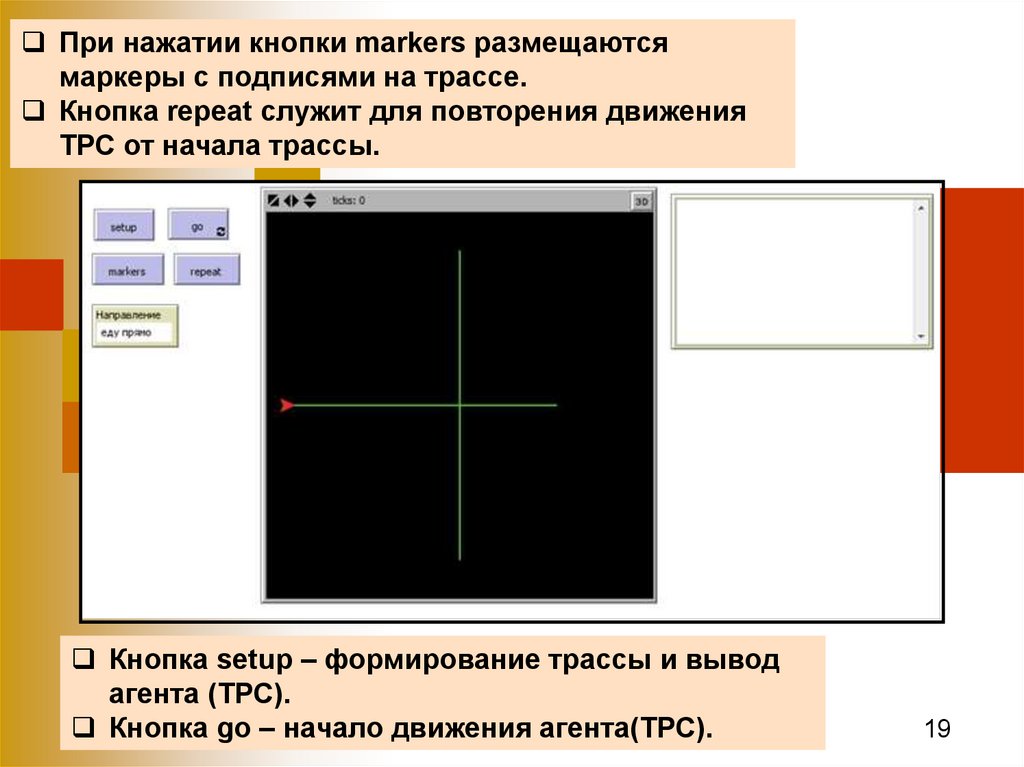
При нажатии кнопки markers размещаютсямаркеры с подписями на трассе.
Кнопка repeat служит для повторения движения
ТРС от начала трассы.
Кнопка setup – формирование трассы и вывод
агента (ТРС).
Кнопка go – начало движения агента(ТРС).
19
20.
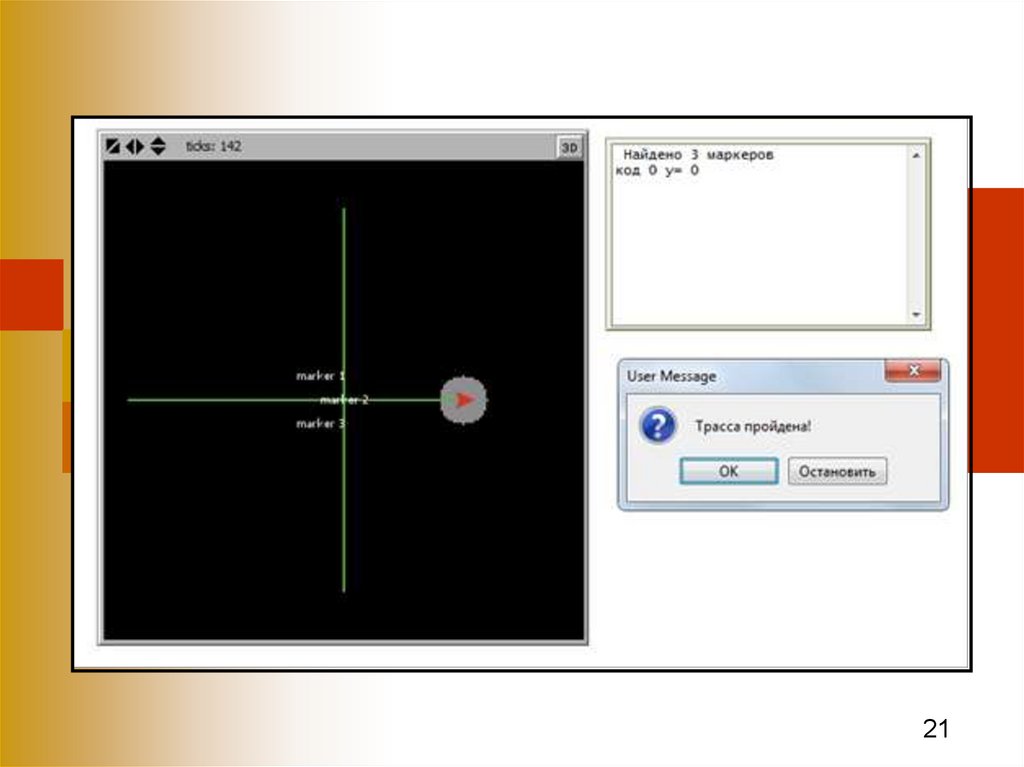
При нахождении на перекрестке случайнымобразом выбирается направление движение.
В окно «Результ» выводится информация и
числе найденных маркеров, координата ТРС
код – номер координаты сегмента трассы и
выбранная координата ТРС по оси Y.
По завершению прохождения трассы
выводится контрольное сообщение .
20
21.
2122.
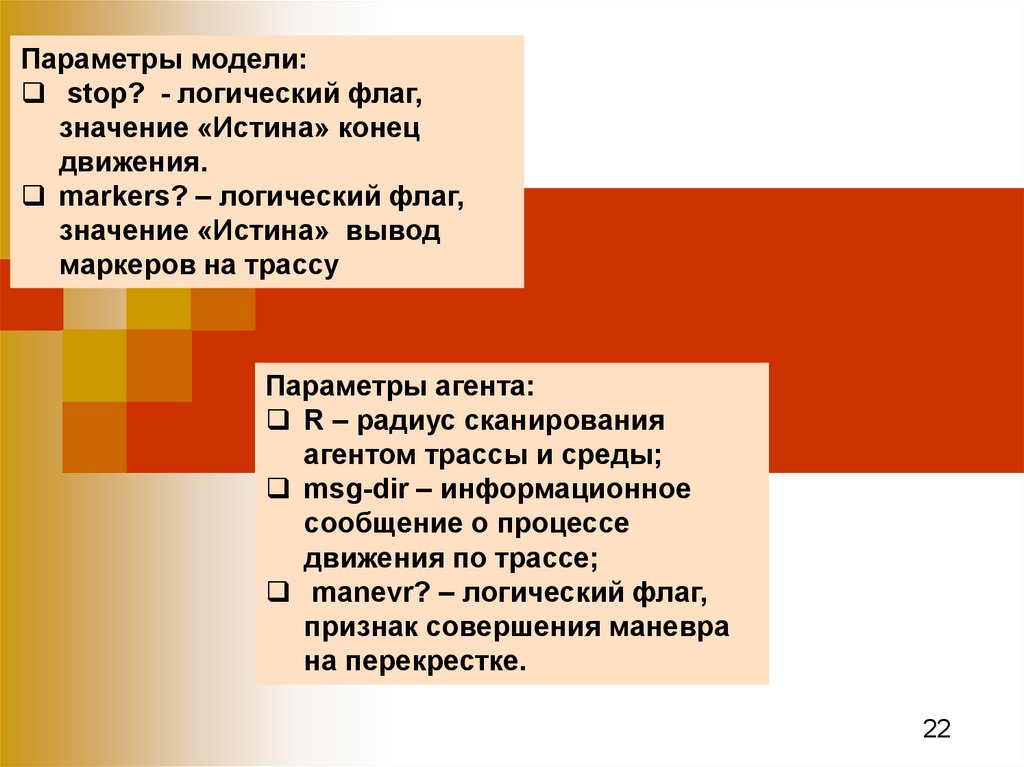
Параметры модели:stop? - логический флаг,
значение «Истина» конец
движения.
markers? – логический флаг,
значение «Истина» вывод
маркеров на трассу
Параметры агента:
R – радиус сканирования
агентом трассы и среды;
msg-dir – информационное
сообщение о процессе
движения по трассе;
manevr? – логический флаг,
признак совершения маневра
на перекрестке.
22
23.
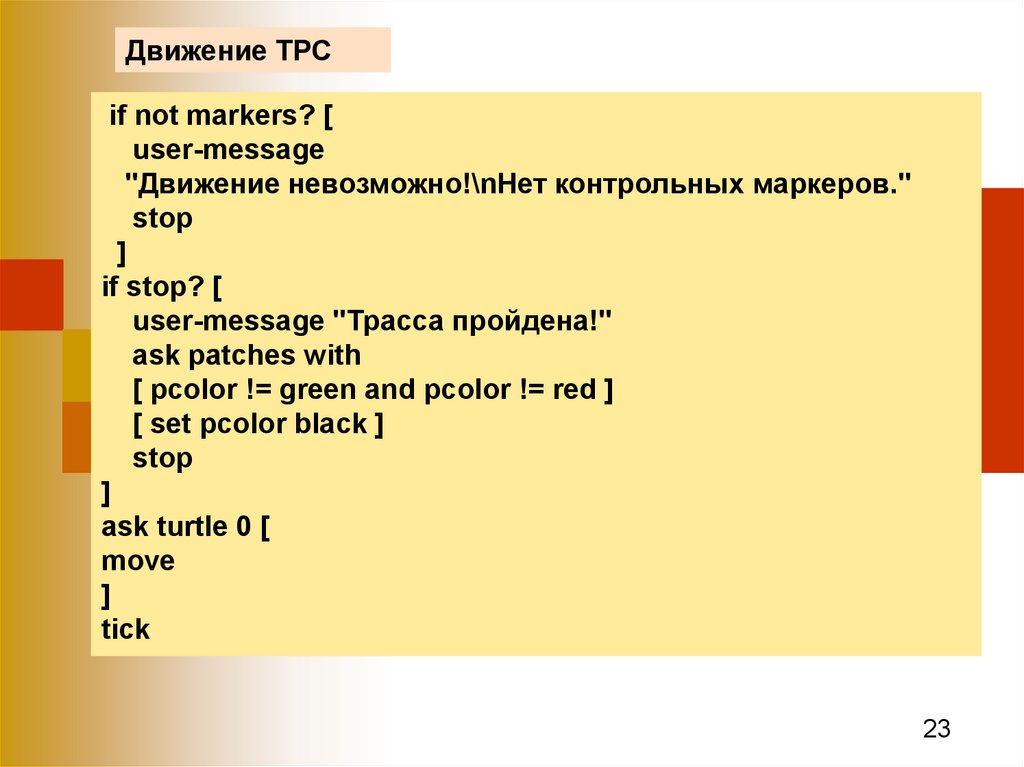
Движение ТРСif not markers? [
user-message
"Движение невозможно!\nНет контрольных маркеров."
stop
]
if stop? [
user-message "Трасса пройдена!"
ask patches with
[ pcolor != green and pcolor != red ]
[ set pcolor black ]
stop
]
ask turtle 0 [
move
]
tick
23
24.
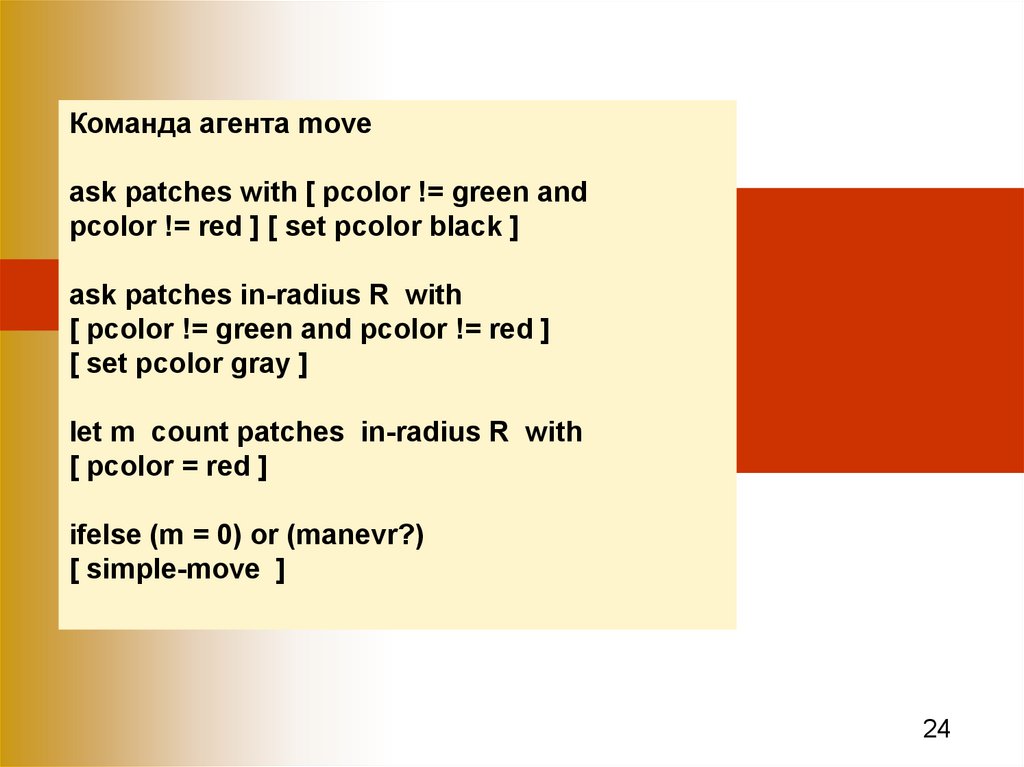
Команда агента moveask patches with [ pcolor != green and
pcolor != red ] [ set pcolor black ]
ask patches in-radius R with
[ pcolor != green and pcolor != red ]
[ set pcolor gray ]
let m count patches in-radius R with
[ pcolor = red ]
ifelse (m = 0) or (manevr?)
[ simple-move ]
24
25.
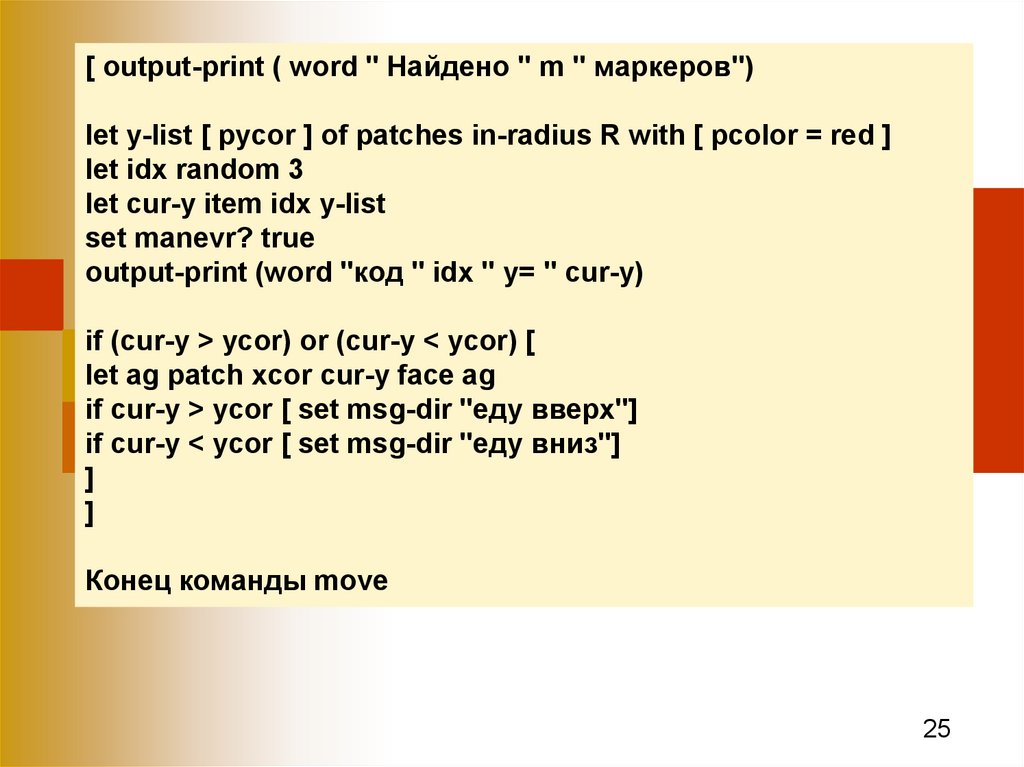
[ output-print ( word " Найдено " m " маркеров")let y-list [ pycor ] of patches in-radius R with [ pcolor = red ]
let idx random 3
let cur-y item idx y-list
set manevr? true
output-print (word "код " idx " y= " cur-y)
if (cur-y > ycor) or (cur-y < ycor) [
let ag patch xcor cur-y face ag
if cur-y > ycor [ set msg-dir "еду вверх"]
if cur-y < ycor [ set msg-dir "еду вниз"]
]
]
Конец команды move
25
26.
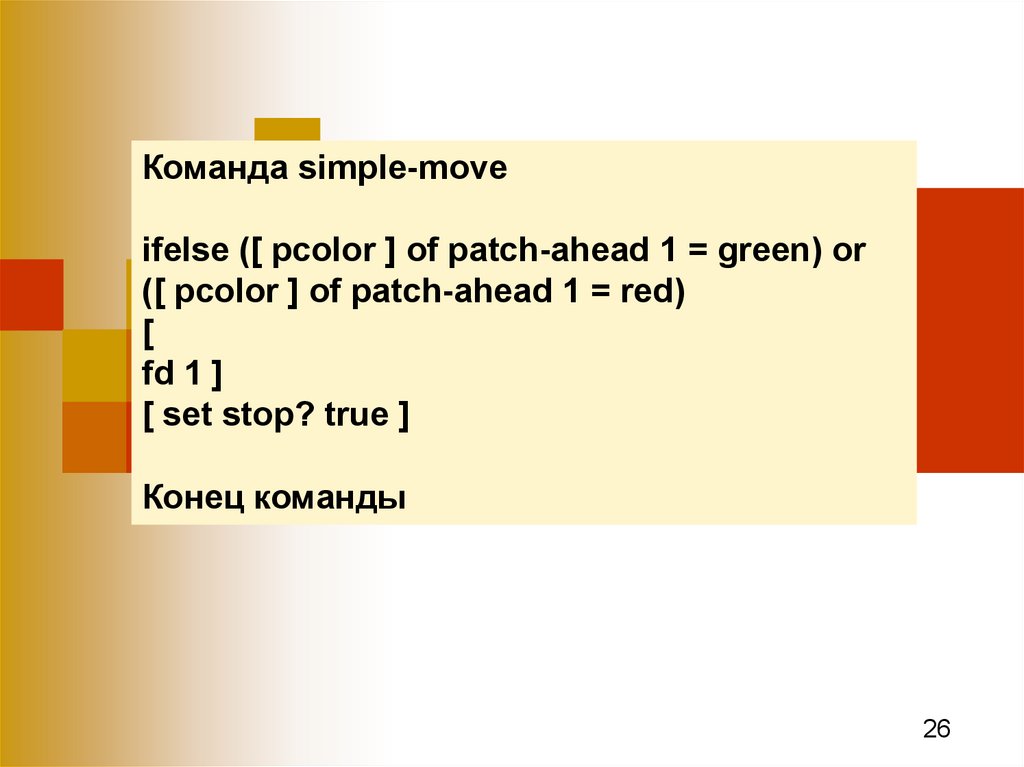
Команда simple-moveifelse ([ pcolor ] of patch-ahead 1 = green) or
([ pcolor ] of patch-ahead 1 = red)
[
fd 1 ]
[ set stop? true ]
Конец команды
26
27.
Выводы:Рассмотрена роль транспорта в современном мире.
Приводятся особенности транспортных систем,
рассмотрены схемы организации движения
транспорта.
Приводится алгоритм и агентная модель движения
беспилотного транспортного средства в дорожной
сети заданной топологии.
Для ориентации в процессе движения транспортное
средство сканирует среду на предмет поиска
контрольных маркеров трассы.
Модель разработана на языке мульти агентного
программирования NetLogo.
27