
 Промышленность
ПромышленностьПохожие презентации:






")



Разработка системы автоматизации двухкоординатного токарного станка
1.
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ АВТОНОМНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«ЮЖНО-УРАЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
(НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ)
ИНСТИТУТ ОТКРЫТОГО И ДИСТАНЦИОННОГО ОБРАЗОВАНИЯ
КАФЕДРА «ТЕХНИКА, ТЕХНОЛОГИИ И СТРОИТЕЛЬСТВО»
РАЗРАБОТКА СИСТЕМЫ АВТОМАТИЗАЦИИ
ДВУХКООРДИНАТНОГО ТОКАРНОГО СТАНКА
Автор студент группы ИОДО-415
_____________Ж.С. Саттимирова
____________________2024 г.
Работа защищена
С оценкой ___________________
__________________ 2024 г.
Челябинск 2024
2.
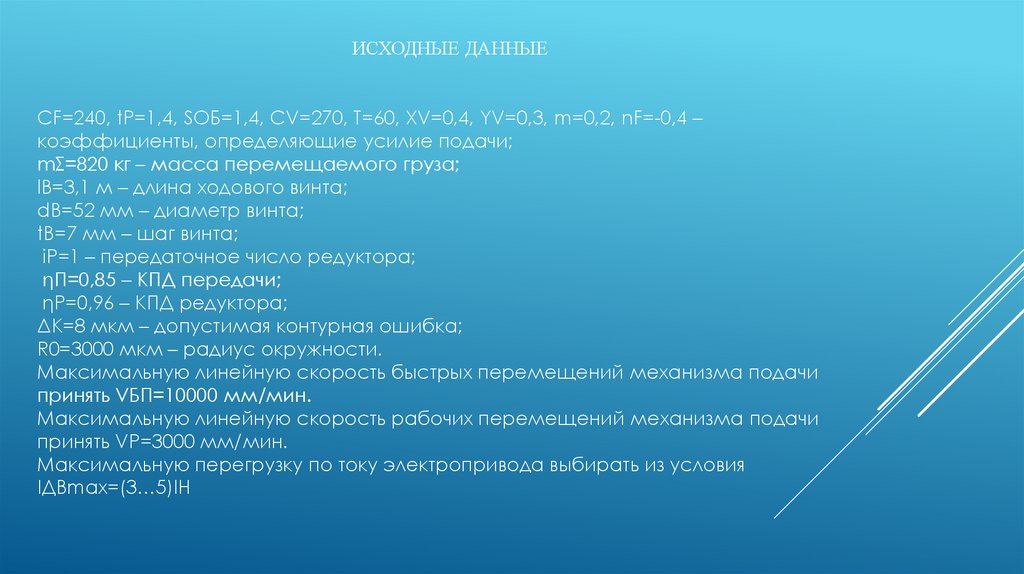
ИСХОДНЫЕ ДАННЫЕCF=240, tP=1,4, SОБ=1,4, CV=270, T=60, XV=0,4, YV=0,3, m=0,2, nF=-0,4 –
коэффициенты, определяющие усилие подачи;
mΣ=820 кг – масса перемещаемого груза;
lВ=3,1 м – длина ходового винта;
dВ=52 мм – диаметр винта;
tВ=7 мм – шаг винта;
iР=1 – передаточное число редуктора;
ηП=0,85 – КПД передачи;
ηР=0,96 – КПД редуктора;
ΔК=8 мкм – допустимая контурная ошибка;
R0=3000 мкм – радиус окружности.
Максимальную линейную скорость быстрых перемещений механизма подачи
принять VБП=10000 мм/мин.
Максимальную линейную скорость рабочих перемещений механизма подачи
принять VP=3000 мм/мин.
Максимальную перегрузку по току электропривода выбирать из условия
IДВmax=(3…5)IH
3.
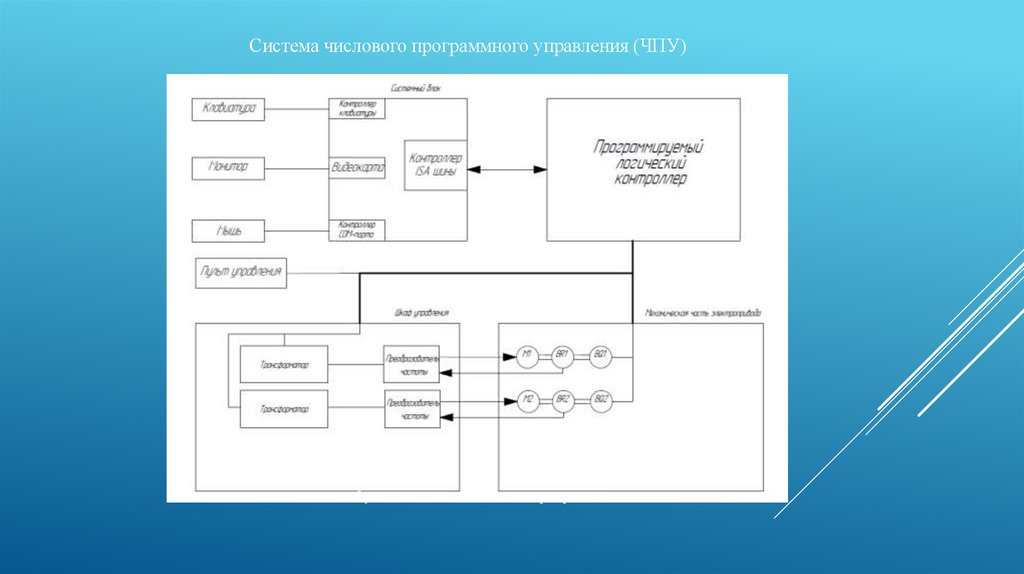
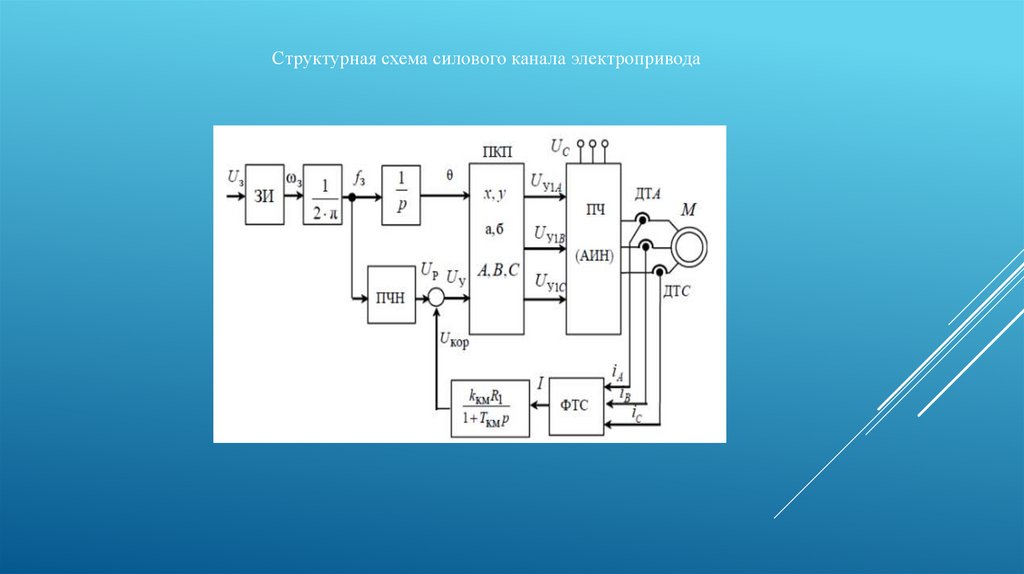
Система числового программного управления (ЧПУ)Функциональная схема электропривода.
4.
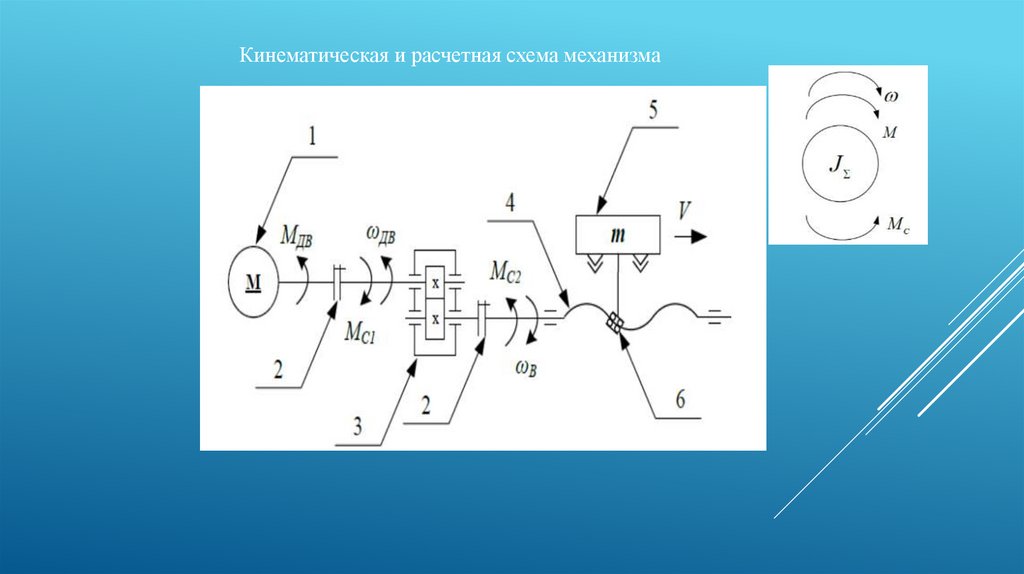
Кинематическая и расчетная схема механизма5.
Технические характеристики преобразователя частоты:-
-
марка/модель
максимальная выходная мощность
максимальная выходная частота
максимальный выходной ток
максимальное выходное напряжение
количество фаз
напряжение питания
частота напряжения питания
номинальный входной ток
ОВЕН ПЧВ102-2К2-В
2,2 кВт
200 Гц
5,2 A
480 В
Трехфазный
От 380 В до 480 В
50/60 Гц
8,5 А