
 Информатика
ИнформатикаПохожие презентации:


")







Модуль управления видеосистемой операционного микроскопа
1.
МИНОБРНАУКИ РОССИИМИРЭА - Российский технологический университет
Институт перспективных технологий и индустриального программирования
Кафедра наноэлектроники
ВЫПУСКНАЯ КВАЛИФИКАЦИОННАЯ РАБОТА
БАКАЛАВРА
по направлению подготовки:
28.03.01 – Нанотехнологии и микросистемная техника
Модуль управления видеосистемой операционного микроскопа
Работу выполнил: Гаврилюк Савелий Сергеевич
Группа: ЭНБО-01-19
Руководитель работы: к.т.н. доцент Певцов Евгений Филиппович
Консультант по основной части: Зав. Отделом разработки ЭВМ ОРВС ФГУ ФНЦ НИИСИ РАН Зуйков Артемий Владимирович
2023 г.
2.
Цель работы: разработка интегрированных с операционныммикроскопом программно-аппаратных средств видеорегистрации
операционного поля с возможностью визуализации и
документирования изображения амплитудных и фазовых структур
заднего отрезка глазного дна в режиме реального времени.
Задачи:
• Синхронизировать лазеры гиперспектрального осветителя
видеокамерой;
• Разработка системы управления шаговыми двигателями,
реализующими масштабирование и пространственный перенос, в
плоскость сенсора видеокамеры, изображения операционного
поля;
• Разработка пульта дистанционного управления (ПДУ)
реализованного в виде приложения для смартфона на базе OS
Android и IOS;
2
3.
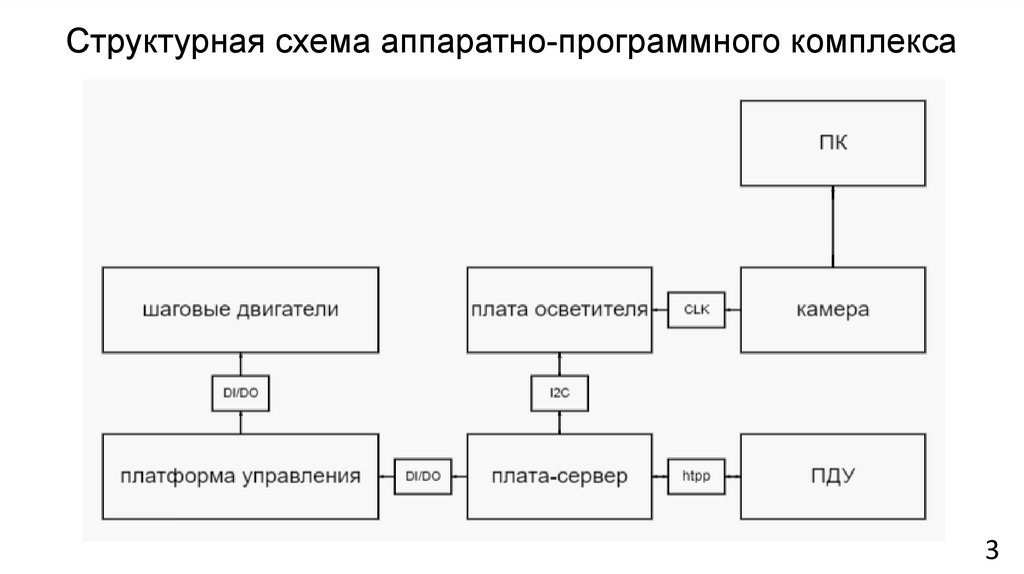
Структурная схема аппаратно-программного комплекса3
4.
Управление подвижными элементами комплексаArduino Mega
Большое количество портов ввода-вывода ->
Arduino Mega2560.
Фрагмент кода С++, в котором реализовано
позиционирование двигателей в заданное положение
5 шаговых двигателей для управления:
1. «диафрагма» - угловое перемещение;
2.«позиционирование зеркала - по двум
ортогональным осям;
3.«ZOOM» - одновременное (синхронное)
линейное перемещение объектива и камеры;
4.«фокус» - линейное перемещение камеры.
4
5.
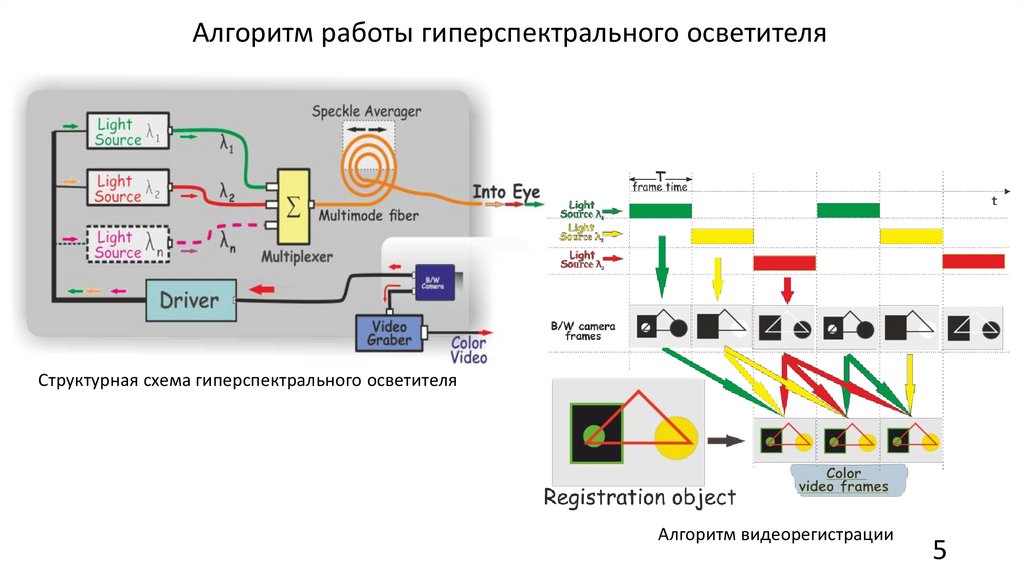
Алгоритм работы гиперспектрального осветителяСтруктурная схема гиперспектрального осветителя
Алгоритм видеорегистрации
5
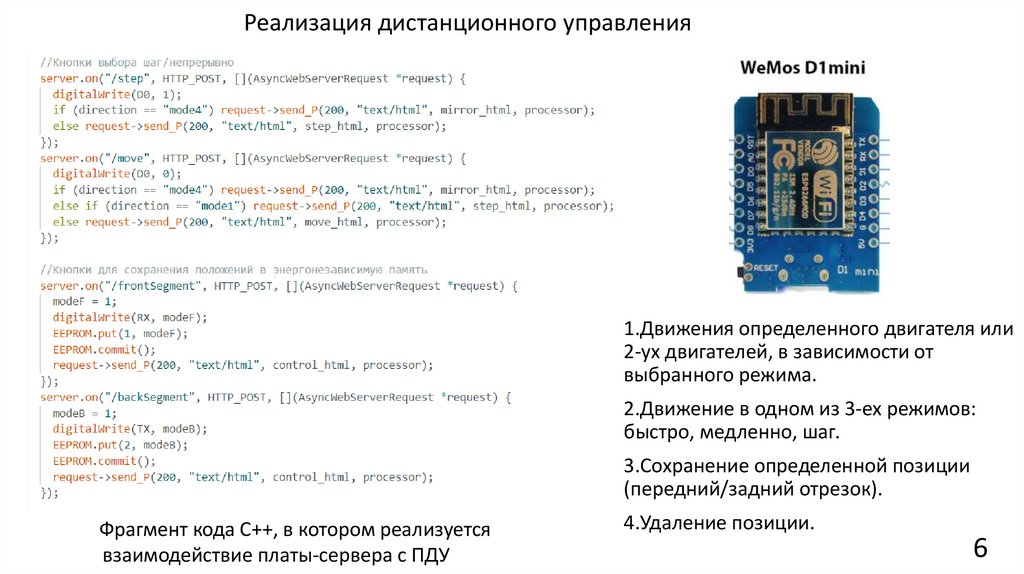
6.
Реализация дистанционного управления1.Движения определенного двигателя или
2-ух двигателей, в зависимости от
выбранного режима.
2.Движение в одном из 3-ех режимов:
быстро, медленно, шаг.
3.Сохранение определенной позиции
(передний/задний отрезок).
Фрагмент кода С++, в котором реализуется
взаимодействие платы-сервера с ПДУ
4.Удаление позиции.
6
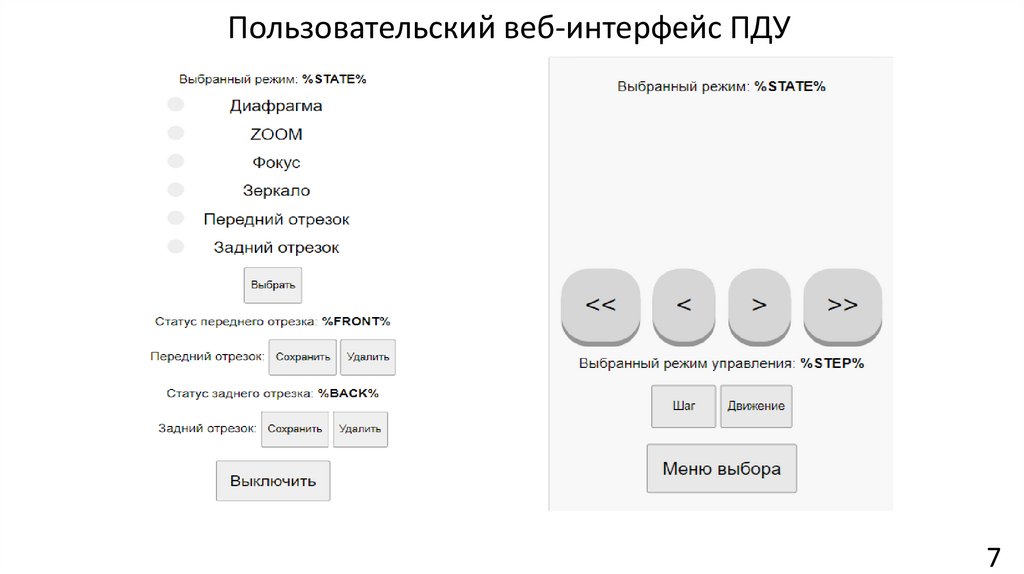
7.
Пользовательский веб-интерфейс ПДУ7
8.
Выводы1. Разработан и изготовлен экспериментальный образец операционного микроскопа,
реализующий:
• Позиционирование шаговых двигателей.
• Функцию ZOOM для масштабирование изображения.
• Настройку зеркал для пространственного переноса изображения операционного
поля в плоскость сенсора видеокамеры.
2. Разработано ПО:
• Web-приложение для управления микроскопом по Wi-Fi соединению.
• Реализация алгоритма синхронизации лазеров осветителя.
• Реализация алгоритма управления шаговыми двигателями.
3. Экспериментальный образец микроскопа посредством синхронизации камеры и
лазеров осветителя конвертирует черно-белое изображение в цветное. В результате
повышается качество видеорегистрации при снижении интенсивности света.
4. Прототип операционного микроскопа планируется применять в витреоретинальной
хирургии.
8