
 Электроника
ЭлектроникаПохожие презентации:










Робототехника. Проект
1.
Муниципальное бюджетное общеобразовательное учреждение школа №11ПРОЕКТ
на тему:
«Робототехника»
ученика 8 класса «Б»
Панкратова Фёдора Алексеевича
учитель:
Лаптева Надежда Николаевна
г.Выкса
2.
Оглавление1)
2)
3)
1)
Введение
Теоретическая часть:
История возникновения робототехники
Направления робототехники
Роль в современном мире
Практическая часть:
Процесс создания роботов
Заключение
Список литературы
3.
Введение (1)Робототехника очень интересная наука, поэтому я
решил сделать проект именно на эту тему. Я считаю
что именно она способна развивать в человеке такие
качества как дисциплину, воображение,
самостоятельность, мелкую моторику и память, а
также помогает нам в решении различных задач.
4.
Введение (2)Я собрал в интернете всю необходимую
информацию с целью узнать и рассказать о такой
науке как робототехника. В этой работе я
постараюсь решить все необходимые задачи.
5.
История возникновения робототехникиПоначалу роботы были скорее инструментом для развлечения. Еще в античную эпоху, за тысячи лет до нашей эры, люди
научились создавать заводные механизмы, например летающих на небольшую дистанцию птиц. Другим удавалось
обуздать воду и ветер в роли привода, чтобы удивлять гостей подвижными статуями, которые могли менять позы на
протяжении званого ужина.
Затем чудеса робототехники получили развитие уже в эпоху Возрождения. Так, например, Леонардо да Винчи изобрел
робота, одетого в доспехи, который мог садиться и двигаться — это, без сомнения, ввело бы неопытного зрителя в
заблуждение, но походило скорее на ярмарочные фокусы. На уровне циркового трюка индустрия держалась еще долго — в
1927 году в Нью-Йорке говорящего и подвижного андроида показал местный ученый, а в 1937 году на выставке в Париже
первого робота смог продемонстрировать уже советский школьник.
Ситуация перешла в более практичное русло из-за индустриальной революции, когда станки и конвейерные ленты
позволили увеличить масштабы производства в тысячи раз. Стало понятно, что при этом образуются монотонные задачи, в
решении которых люди были неэффективны. Также требовалось работать с опасными субстанциями, включая токсичные и
радиоактивные элементы.
6.
Направления робототехникиУправление. Сегодня роботы управляются с помощью программ, есть следующие варианты управления:
Машины с жесткой программой. В них заложена одна программа с одним вариантом работы, которая не способная меняться. Робот действует всегда и в любых
условиях по одному и тому же алгоритму.
Адаптивные роботы. В них внедрена сенсорная система, которая считывает внешние условия, а программа в зависимости от них может выбирать один из вариантов
работы.
Роботы с гибкими программами. Это самые современные модели, которые ориентируются на цель работы, могут не только получать, но и анализировать
информацию о внешних факторах. В зависимости от них роботы гибко меняют поведение и выбирают оптимальный вариант поведения и действий.
Коллаборативные роботы. Это машины, которые работают в «сотрудничестве» с человеком, то есть их действия не полностью независимы, а контролируются или
управляются оператором.
Позиционирование. Роботы программируются с различными системами координат и разным позиционированием в пространстве.
С прямоугольной системой координат. Они могут перемещаться по двум либо трем осям — в плоскости или в пространстве.
С цилиндрической системой координат. Такие роботы вращаются в одной степени и перемещаются минимум в одном направлении.
С полярной системой координат. Подобные агрегаты имеют две степени вращательного движения.
Шарнирные роботы уже имеют три и более вращательных степеней.
Scara — имеют две вращательные степени, которые передвигаются по параллельным осям.
Комбинированные роботы — совмещают разные типы позиционирования и перемещения.
Способ перемещения. Если роботу необходимо передвигаться, он оснащается различными системами перемещения. Их выбор зависит от назначения
робота и от того, где он будет применяться. Способы перемещения могут быть изолированы, а могут сочетаться и комбинироваться.
Колеса. Робот может иметь разное число колес от одного и более. Колеса также влияют на маневренность.
Гусеницы. Роботы на гусеничном ходу имеют высокую проходимость, поэтому они востребованы в сложных природных условиях, в боевых установках и т. п.
Имитация человеческих шагов. Такой способ перемещения применяют в основном в человекоподобных роботах-андроидах.
Полет. Используются разные механизмы и способы, чтобы поднять робота в воздух. Обычно такие технологии используются в БПЛА разного назначения — от
игрушечных до боевых дронов.
Плавание. Как и с летающими роботами, есть разные способы «заставить» робота плыть.
Имитация движений животных. Робот может имитировать передвижение любых животных, от насекомых до млекопитающих.
7.
Роль в современном миреРобототехника находит применение в различных отраслях, таких как производство, медицина, авиация, образование,
домашнее хозяйство и транспорт. Один из ключевых аспектов робототехники в современном мире - это автоматизация
производства и промышленности. Роботы используются для выполнения монотонных, опасных или трудоемких задач, что
повышает производительность, снижает стоимость производства и улучшает условия труда для работников.
В медицинской сфере робототехника тоже играет важную роль, обеспечивая точные хирургические операции, помощь в
реабилитации и уход за пациентами. Робототехника также используется в исследованиях и разработках новых лекарств и
методов лечения.
Роботы осуществляют автономные миссии в космосе и на дне океана, помогают в создании беспилотных транспортных
средств и дронов, улучшают системы безопасности и обслуживания инфраструктуры.
Особую роль играет робототехника в процессе образования, помогая студентам познавать и понимать принципы механики,
электроники и программирования. Эта область техники способствует развитию логического мышления, креативности и
способностей к решению задач.
Кроме того, с развитием робототехники возникают новые вызовы и вопросы, связанные с этическими и юридическими
аспектами использования роботов в обществе. Возникают вопросы о безопасности, приватности данных, и о влиянии
автоматизации на рынок труда.
8.
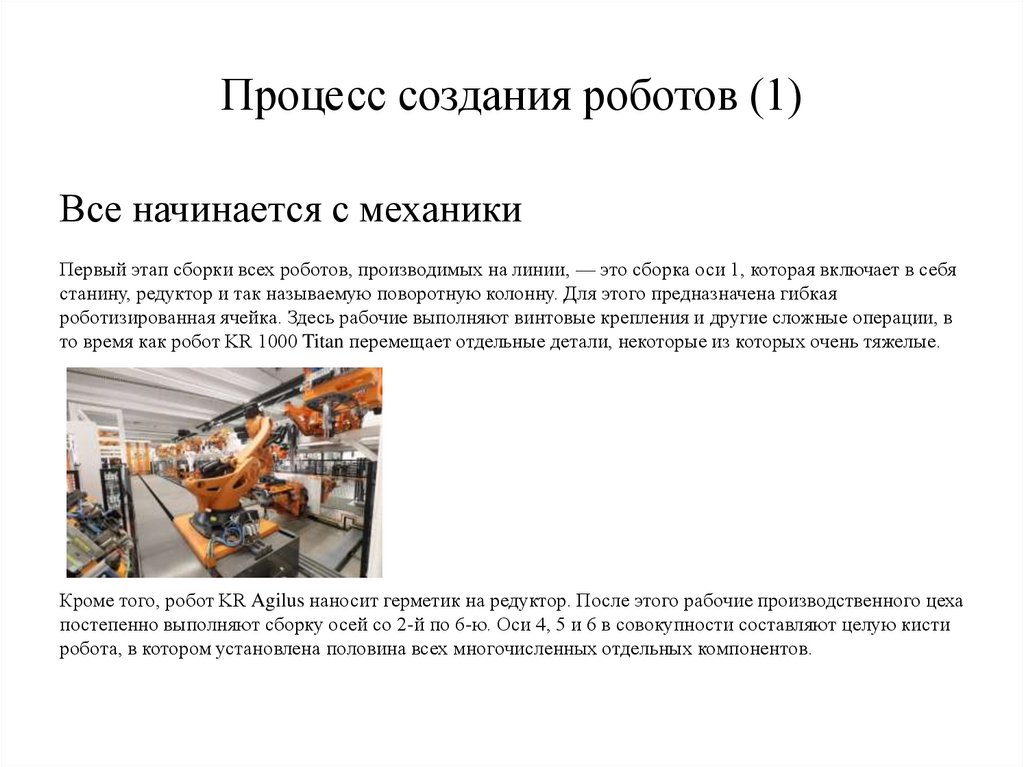
Процесс создания роботов (1)Все начинается с механики
Первый этап сборки всех роботов, производимых на линии, — это сборка оси 1, которая включает в себя
станину, редуктор и так называемую поворотную колонну. Для этого предназначена гибкая
роботизированная ячейка. Здесь рабочие выполняют винтовые крепления и другие сложные операции, в
то время как робот KR 1000 Titan перемещает отдельные детали, некоторые из которых очень тяжелые.
Кроме того, робот KR Agilus наносит герметик на редуктор. После этого рабочие производственного цеха
постепенно выполняют сборку осей со 2-й по 6-ю. Оси 4, 5 и 6 в совокупности составляют целую кисти
робота, в котором установлена половина всех многочисленных отдельных компонентов.
9.
Процесс создания роботов (2)Принципы автоматизации и результаты Четвертой
промышленной революции применяются на
практике в Аугсбурге
Как и большая часть основных элементов роботов, детали кистей роботов производятся в механическом
цехе в Аугсбурге. Его особенность состоит в применении робота KUKA из серии QUANTEC, который
загружает необработанные детали в центр механической обработки, где изготавливаются элементы. В
промежутках между циклами загрузки робот также выполняет машинную обработку деталей и зачищает
кромки от заусенцев. Таким образом, все этапы машинной обработки, необходимые для производства
изделия, могут выполняться в одной ячейке.
Винты, которые затем потребуются для сборки готовых деталей, подаются с помощью робота KMR iiwa.
Всенаправленная платформа, на которой установлен робот LBR iiwa, не только распознает станцию
назначения того или иного винта с помощью RFID сканера, но также отслеживает наличие товаров на
складе и автоматически выполняет заказы для пополнения запасов. А также она перемещает детали в
необходимые места. Таким образом, рабочий персонал освобождается от выполнения утомительных
однообразных операций сортировки.
10.
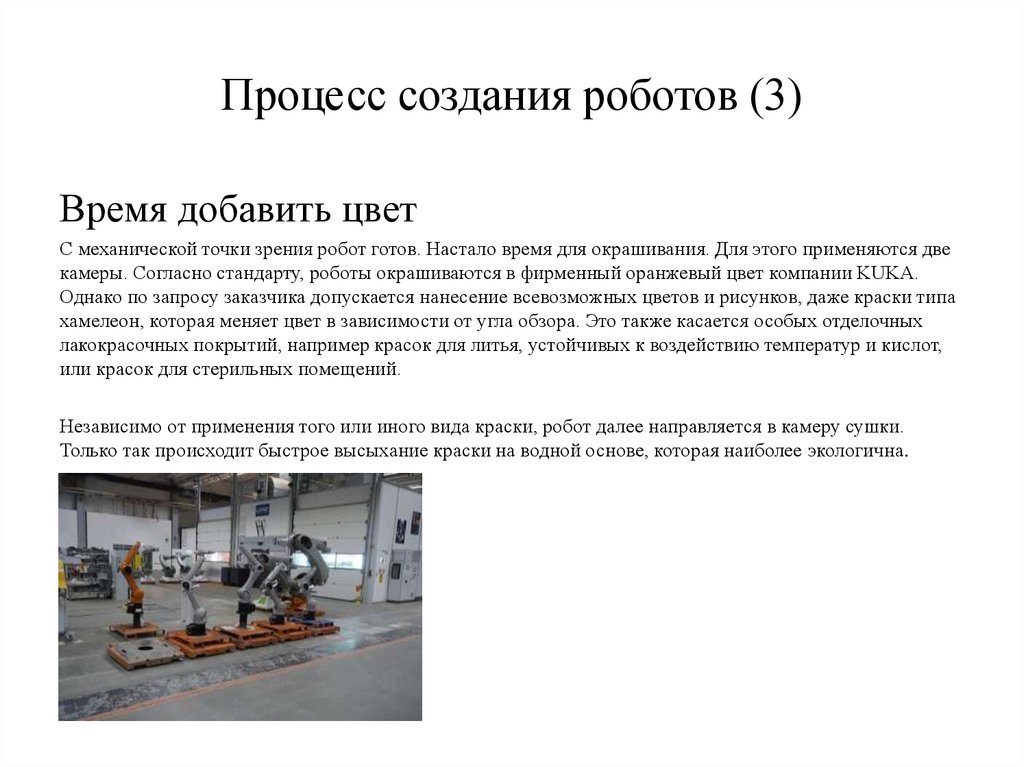
Процесс создания роботов (3)Время добавить цвет
С механической точки зрения робот готов. Настало время для окрашивания. Для этого применяются две
камеры. Согласно стандарту, роботы окрашиваются в фирменный оранжевый цвет компании KUKA.
Однако по запросу заказчика допускается нанесение всевозможных цветов и рисунков, даже краски типа
хамелеон, которая меняет цвет в зависимости от угла обзора. Это также касается особых отделочных
лакокрасочных покрытий, например красок для литья, устойчивых к воздействию температур и кислот,
или красок для стерильных помещений.
Независимо от применения того или иного вида краски, робот далее направляется в камеру сушки.
Только так происходит быстрое высыхание краски на водной основе, которая наиболее экологична.
11.
ЗаключениеВ заключение хочу добавить, что мне удалось
решить все поставленные передо мной задачи,
найти необходимую информацию, отобразить ее в
этой работе и ответить на все вопросы. Стоит
добавить, что я узнал много нового работая над
этим проектом. Робототехника действительно
является очень интересной наукой.
12.
Список литературы• А. Азимов, «Я робот»
• Е. И. Юревич, «Основы робототехники»
• Дуглас Вильямс, «Программируемый робот,
управляемый с КПК»
• К. Шулган, Л. Бернс, «Автономия. Как появился
автомобиль без водителя и что это значит для
нашего будущего»
• Егоров О.Д., Подураев Ю.В., Бубнов М.А,
«Робототехнические мехатронные системы»