










 Электроника
Электроника Промышленность
ПромышленностьПохожие презентации:










Опытные разработки. МП 10С 13ВД
1. Опытные разработки
2. МП10С13ВД
Фото 1:МП10С6..8ВДФото 2:МП10С2,5А0
3. Сравнительная характеристика
Характеристика МП10С2,5А0Нагрузка на шток,
Н(кгс)
Скорость
штока, мм/с
Поддержание скорости
и/или момента
Вес,г
Блок концевых
выключателей
960(100)
2,5
нет
870
Контактный
Характеристика МП10С13ВД
Нагрузка на шток,
Н(кгс)
Скорость
штока, мм/с
Поддержание скорости
и/или момента
Вес,г
Блок концевых
выключателей
960(100)
4,7..13
есть
730
Бесконтактный
4.
Для получения данных характеристики на механизме МП10 был разработанновый вентильный электродвигатель ДБ32-20-7.
Момент,г
*см
Частота ращения,
об/мин
Ток,
А
Мощность
на валу,Вт
Потребляемая
мощность,Вт
КПД,%
0
8500
0,07
0,0
1,8
0
100
8000
0,53
8,21
14,3
57,3
200
7600
0,82
15,59
22,1
70,4
250
7500
1,0
19,23
27,0
71,2
300
7250
1,2
22,31
32,4
68,9
350
7140
1,4
25,63
37,8
67,8
Характеристика ДБ32-20-7
По итогам испытаний электродвигателя потребовалась доработка самого
электромеханизма:
1.Изменен планетарный редуктор(уменьшено количество ступеней редуктора)
2.Установлен бесконтактный блок концевых выключателей;
3.Разработан коммутатор и испытан в виде макета.
5.
Работа МП10С6..8ВД на нагрузочном устройстве при номинальная нагрузке 100кгс6. Заключение по МП10С6..8ВД
Новый мотор позволит:• существенно расширить возможности стандартного* электромеханизма МП10
варьируя типами применяемых ШВП и ПТС:
– увеличить диапазон скоростей штока: от 2,5мм/с до 66мм/с;
– увеличить диапазон нагрузки: от 20кгс до 150кгс;
– уменьшить себестоимость.
создать патентно-чистые электромеханизмы под современные требования рынка:
– различные хода : от 40 до 300мм;
– различные типы исполнения:
• гражданские;
• военные;
– создание мехатронного модуля(блок управления, электродвигатель
исполнительный механизм в одном корпусе);
– создание механизма новой компоновки.
В данный момент основной задачей является изготовление рабочего образца
интеллектуального блока управления вентильным электродвигателем.
*на весь модельный ряд МП10 патентодержателем является ОАО”Электропривод”
7. Пример механизма новой компоновки.
Фото 3 : механизм в исполнении ”раздвижная тяга ”МП10С18ВДЧасть деталей и узлов этого электромеханизма заимствовано с МП10….
Его характеристики представлены в таблице.
Нагрузка на шток,
Н(кгс)
Скорость штока,
мм/с
Поддержание скорости
и/или момента
Вес,г
Блок концевых
выключателей
960(100)
4,5..18
есть
435
отсутствуют
8. Пример применения электромеханизмов поступательного и вращательного действия
Опорно-поворотное устройство для антенны полевой микроволновойрадиостанции
9. ” Векторное управление ” электроприводами
Разработана система ”векторного управления” для асинхронного электродвигателя двигателя. Вкачестве датчика обратной связи применен оптический энкодер.
На данной фотографии представлен
блок управления асинхронным
электродвигателем 115В/400Гц
Диапазон регулиро-вания у
электродвигателя
ДАТ80-250-12 получился от 30 до
12000 об/мин с поддержанием
скорости и/или момента.
10.
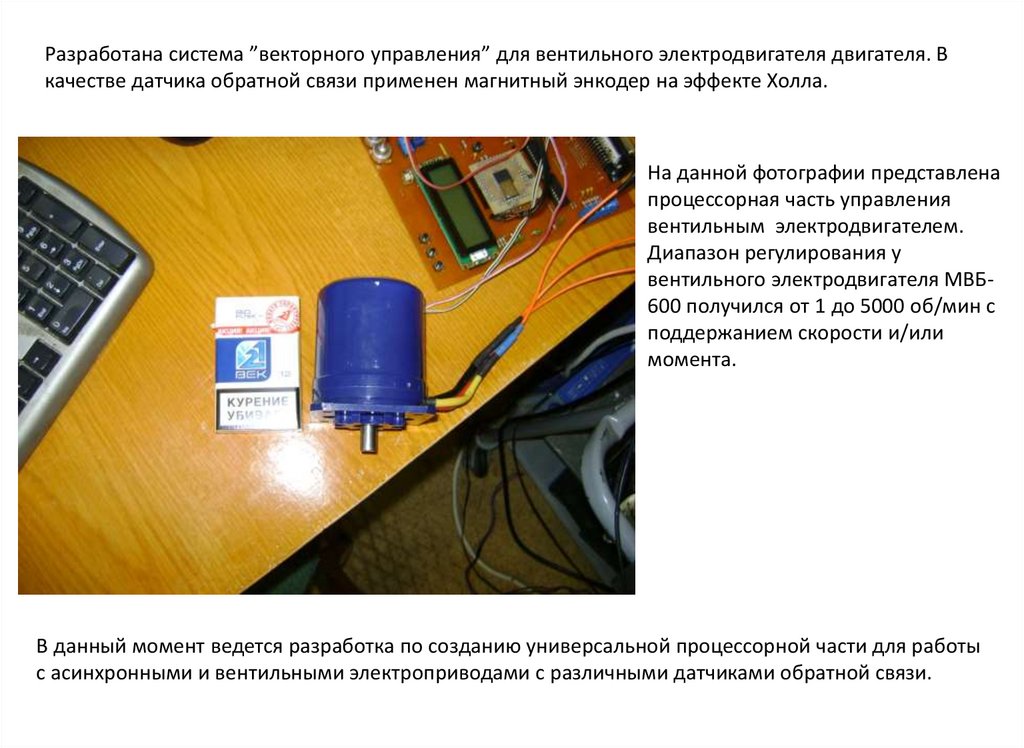
Разработана система ”векторного управления” для вентильного электродвигателя двигателя. Вкачестве датчика обратной связи применен магнитный энкодер на эффекте Холла.
На данной фотографии представлена
процессорная часть управления
вентильным электродвигателем.
Диапазон регулирования у
вентильного электродвигателя МВБ600 получился от 1 до 5000 об/мин с
поддержанием скорости и/или
момента.
В данный момент ведется разработка по созданию универсальной процессорной части для работы
с асинхронными и вентильными электроприводами с различными датчиками обратной связи.
11. Ряды вентильных электродвигателей с внешним ротором.
Разработаны три типа размера электродвигателей:• ДБ32-20-7. Установлен на электромеханизм МП10С6..8ВД
• МВБ-600. Один из двигателей установлен на электрические роликовые коньки, второй был
доработан под использование с магнитный энкодер и испытан в составе системы ”векторного
управления”.
• ДБ85-2000-7. Разрабатывается для грузовой лебедочной системы ЛПГ-300.
Два первых двигателя являются законченными образцами. Третий на стадии
испытаний и корректировки РКД.
Так же ведется исследовательская работа над макетным образцом электро-двигателя для
электромеханизма МП4С2,5А. В этом электродвигателе применена другая магнитная
система для того, чтобы отказаться от стояночной муфты. Электродвигатель получился
массой 50 грамм и расчетной мощностью 5Вт. Обороты холостого хода 19000 об/мин.
Характеристику снять в наших условиях
не представляется возможным, поэтому двигатель будет испытан в составе
электромеханизма.
Характеристика на ДБ32-20-7 представлена в начале презентации.
12.
Таблица с характеристикой и внешний вид электродвигателя МВБ-600I, А
U, В M, кг*см n, об/мин P1, Вт Pмех, Вт
кпд
1,5
24
0,0
5900
36
0
0,0
8,0
24
2,0
5600
192
115
59,9
13,0
25
5,0
5260
325
270
83,1
23,0
24
10,0
4860
552
499
90,4
34,0
24
18,5
4100
816
779
95,5
13.
Таблица с характеристикой и внешний вид электродвигателя ДБ85-2000-7Момент
Н*м
0
0,5
1,0
1,6
2,3
2,8
n
об/мин
5700
5200
4850
4450
4850
4100
Ток
А
4
12
22
31
43
52
Мощность на валу
Вт
0.0
266
497
730
967
1105
Потребляемая
Мощность Вт
108
324
594
837
1161
1404
КПД
%
0
85
86
90
86
81
14.
Заключение по вентильным электродвигателямДля дальнейшей работы над рядами вентильных электродвигателей ведется разработка
автоматического нагрузочного стенда. Нагрузочный стенд должен перекрывать диапазон мощностей
от 100Вт до 1000Вт.
15.
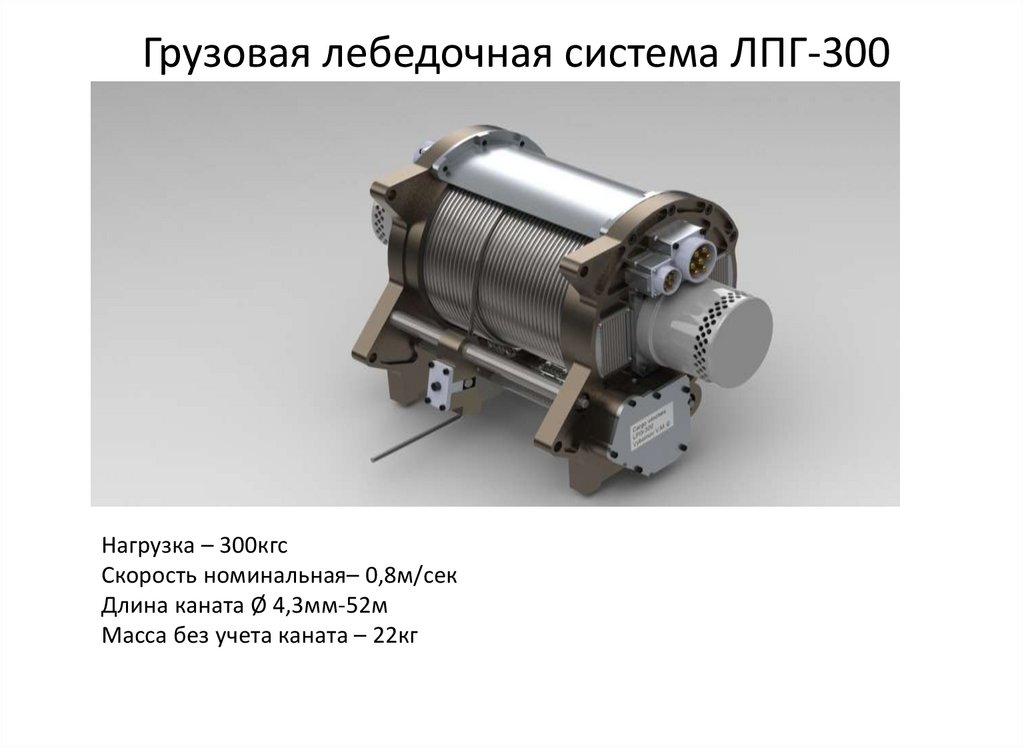
Грузовая лебедочная система ЛПГ-300Нагрузка – 300кгс
Скорость номинальная– 0,8м/сек
Длина каната Ø 4,3мм-52м
Масса без учета каната – 22кг