")







")

 Физика
ФизикаПохожие презентации:




")

")



Динамика (уроки 6-10)
1. Динамика (уроки 6-10)
Примечание:в конспекте должно быть все, что записано красным,
бордовым цветом или выделено красным.
Формулы, схемы должны быть представлены все.
Материал представленный черным цветом
дополнительный.
Материал представленный курсивом для прочтения.
2.
Механика это наука одвижении и взаимодействии тел.
Впервые принципы механики было
сформулированы еще Ньютоном в
конце 17 века. Законы Ньютона
считались абсолютно точными
вплоть до начала 20 века, когда на
смену им не пришла теория
относительности.
Наивысшим достижением
гения Ньютона были исследования
в области физики и небесной
механики, кульминацией которых
стала теория тяготения.
3.
1. Основные понятия динамики.1.1. Сила - векторная физическая
величина, являющаяся мерой
механического действия на
данное тело со стороны других
тел.
Это действие вызывает изменение
скорости точек тела
или его деформацию.
[F] = Н.
• Сила – векторная величина
• Н = кг м/с2
4.
1.2. Инертность - свойство тела, состоящее в том, чтодля изменения скорости телу необходимо время.
Пример: пассажир в вагоне поезда.
Свойство тел сохранять свою скорость при отсутствии
действия на него других тел называется инерцией.
Системы отсчета, в которых выполняется первый закон
Ньютона, называются инерциальными. Системы
отсчета, движущиеся относительно инерциальных с
ускорением, называются неинерциальными
1.3. Масса тела
– количественная мера его инертности.
[m] = кг.
5.
ОСНОВНЫЕ ЗАКОНЫ ДИНАМИКИ.В основе механики лежат три закона, которые
являются обобщением большого числа экспериментальных
данных и были подтверждены на практике.
I закон Ньютона.
Существуют такие системы отсчета, относительно
которых поступательно, движущиеся тела сохраняют свою
скорость постоянной. Если на них не действуют другие
тела или их действие скомпенсированы.
Если на тело не действуют силы или их действие
скомпенсировано, то данное тело находится в состоянии
покоя или равномерного прямолинейного движения.
В инерциальных системах отсчета свободное тело
движется прямолинейно и равномерно.
Если в пределах точности измерения в данной системе
отсчета
первый
закон
Ньютона
выполняется
в
гелиоцентрической системе отсчет.
6.
II закон Ньютона.Ускорение тела прямо пропорционально
равнодействующей сил, приложенных к
телу, и обратно пропорционально его массе:
Если два тела взаимодействуют друг с
другом, то ускорения этих тел обратно
пропорциональны их массам.
7.
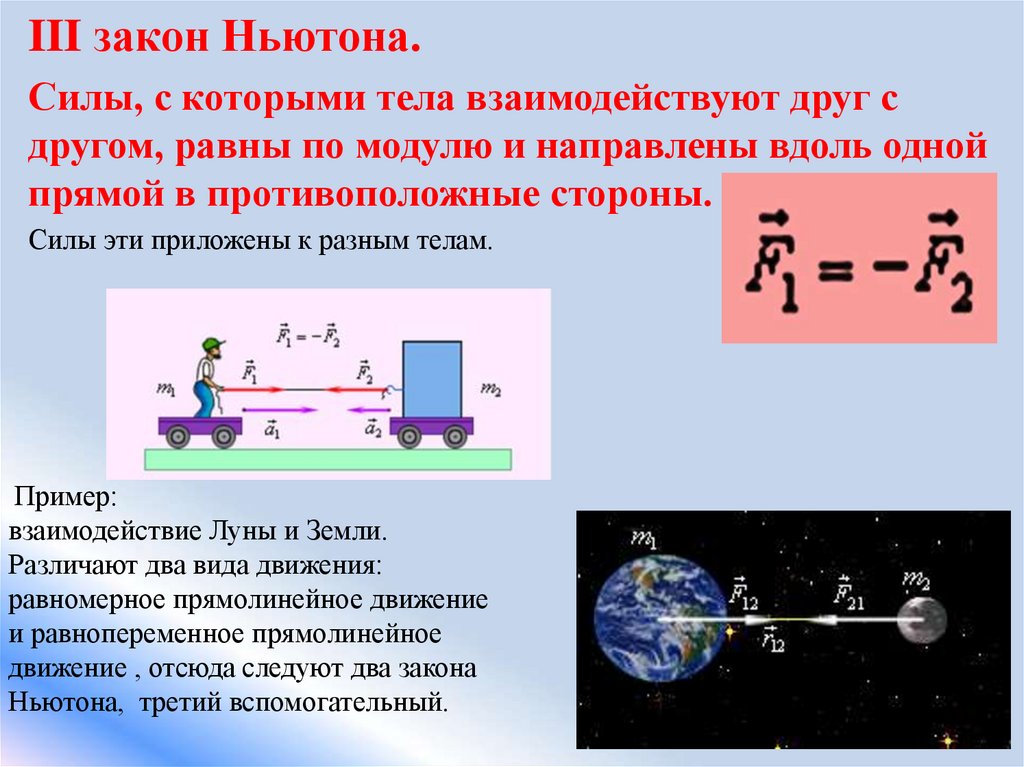
III закон Ньютона.Силы, с которыми тела взаимодействуют друг с
другом, равны по модулю и направлены вдоль одной
прямой в противоположные стороны.
Силы эти приложены к разным телам.
Пример:
взаимодействие Луны и Земли.
Различают два вида движения:
равномерное прямолинейное движение
и равнопеременное прямолинейное
движение , отсюда следуют два закона
Ньютона, третий вспомогательный.
8. СИЛЫ В ПРИРОДЕ.
Происхождение силы: Гравитационные силы.Название силы
Изображение сил
и величин, от которых
зависит сила
Закон
Сила
Всемирного
тяготения
Массы взаимодействующих тел – m1 и m2
Расстояние между центрами масс тел – r
Гравитационная постоянная
см. приложение учебника или задачника
G = 6,67 10-11 Нм2 /кг2
9.
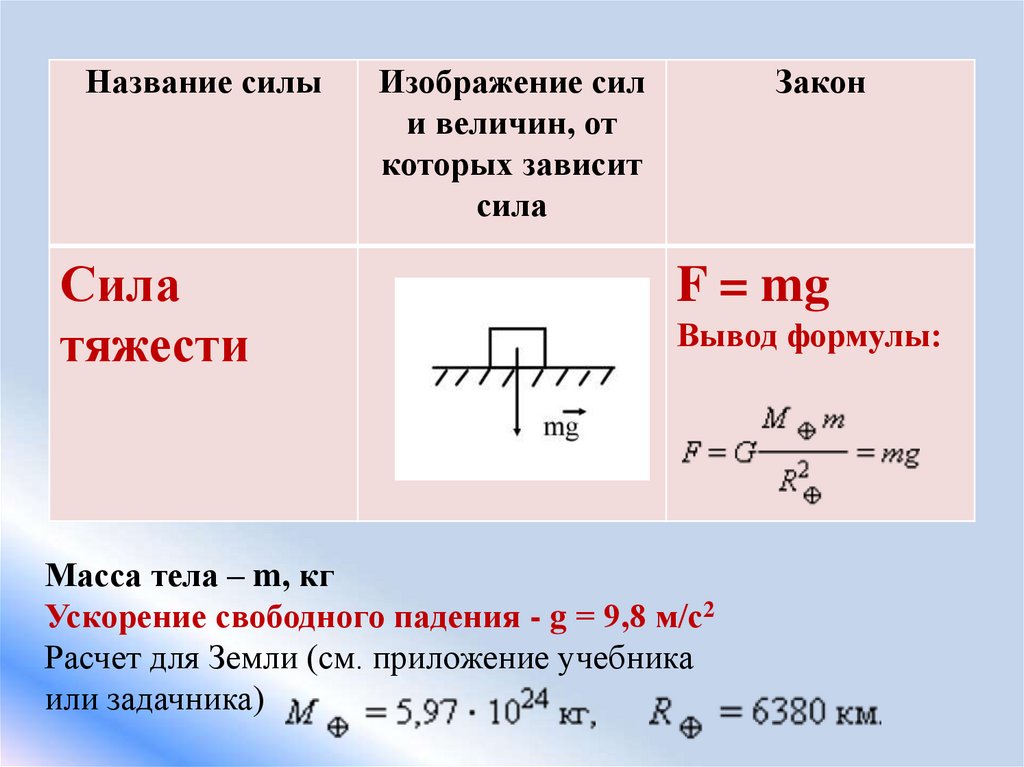
Название силыСила
тяжести
Изображение сил
и величин, от
которых зависит
сила
Закон
F = mg
Вывод формулы:
Масса тела – m, кг
Ускорение свободного падения - g = 9,8 м/с2
Расчет для Земли (см. приложение учебника
или задачника)
10. Происхождение силы: электромагнитные силы.
Название силыИзображение сил
и величин, от
которых зависит
сила
Сила
Упругости
x - смещение, [x] = м
k - коэффициент жесткости,
величина табличная
[k] = Н/м
Закон
Fупр =-kx
11.
Названиесилы
Изображение сил
и величин, от которых
зависит сила
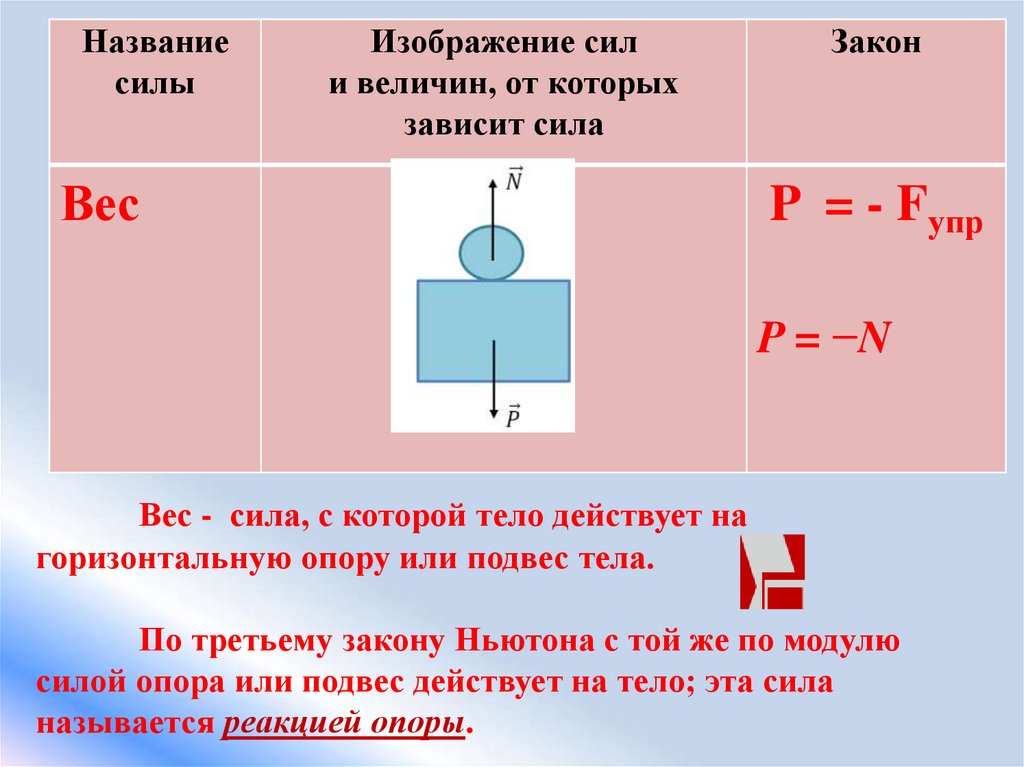
Вес
Закон
P = - Fупр
P = −N
Вес - сила, с которой тело действует на
горизонтальную опору или подвес тела.
По третьему закону Ньютона с той же по модулю
силой опора или подвес действует на тело; эта сила
называется реакцией опоры.
12.
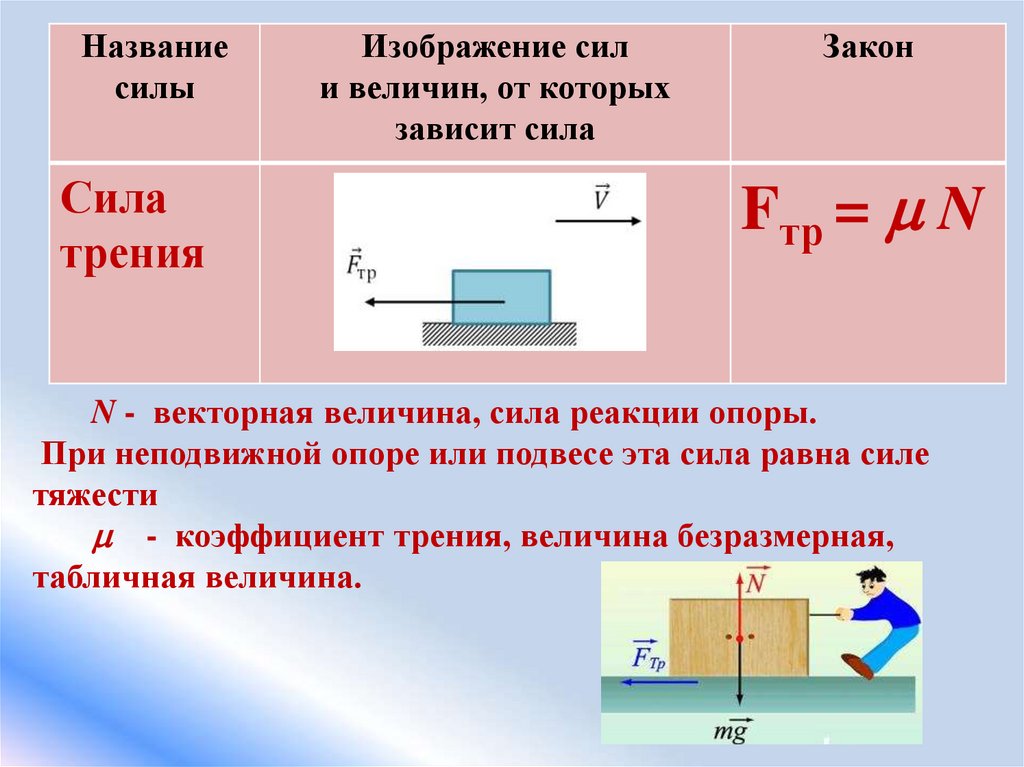
Названиесилы
Сила
трения
Изображение сил
и величин, от которых
зависит сила
Закон
Fтр = m N
N - векторная величина, сила реакции опоры.
При неподвижной опоре или подвесе эта сила равна силе
тяжести
m - коэффициент трения, величина безразмерная,
табличная величина.
13.
Названиесилы
Изображение сил
и величин, от
которых зависит
сила
Закон
Сила
Архимеда
FАрх =
жVg
V – объем вытесненной жидкости, м3 .
g – ускорение свободного падения, 9,8 м/с2 .
- плотность жидкости, кг/м3 .(греческая буква «ро»)
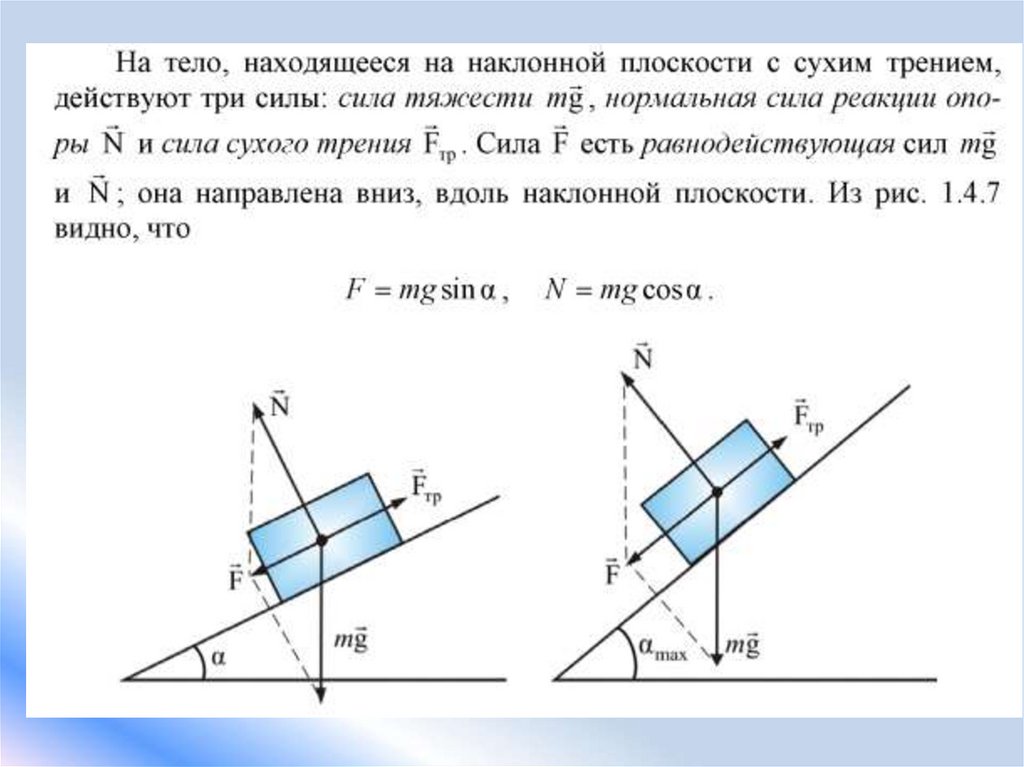
14. Равнодействующая сила
В реальных условияхредко встречаются случаи,
когда на тело действует
только одна сила, обычно их
несколько.
Сила, равная геометрической сумме всех
приложенных к телу сил, называется
равнодействующей силой.
15.
16.
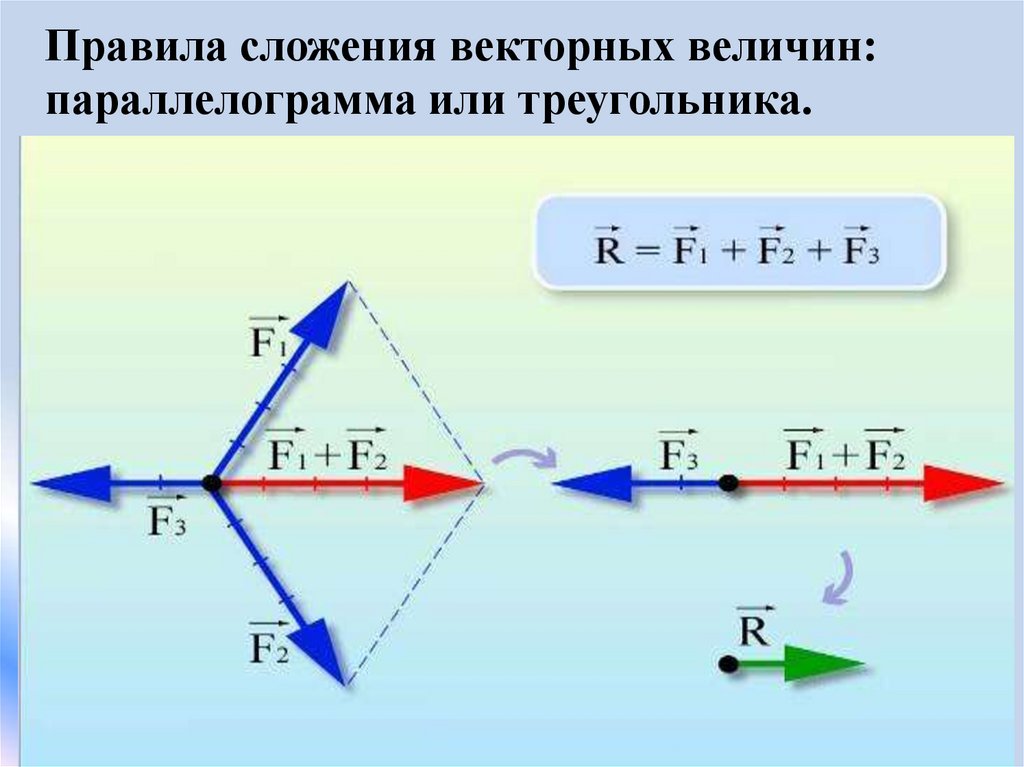
Правила сложения векторных величин:параллелограмма или треугольника.
17. Пример:
Равнодействующая сил - сила, котораясвоим действием заменяет или дает тот же
результат что и остальные силы.
Пример: рассмотрим, какие силы действуют на брусок, лежащий на опоре.
Равнодействующая сила в данном примере равна нулю.
- сила тяжести
- сила трения
- сила реакции опоры
- сила тяги
18. ЗАКОН СОХРАНЕНИЯ ИМПУЛЬСА
Импульс тела - векторная физическаявеличина, характеризующая движущееся
тело; направление которого совпадает с
направлением скорости тела.
р
кг м
с
Замкнутая система тел - система тел, не
взаимодействующих с другими телами, не входящими в эту
систему.
19.
Закон сохранения импульса.В замкнутой системе геометрическая сумма
импульсов тел остается постоянной при любых
взаимодействиях тел этой системы между собой.
m m m m
1
1
2
2
/
1
1
2
/
2
20. Закон сохранения импульса на примере столкновения шаров. (перечертить пример)
21.
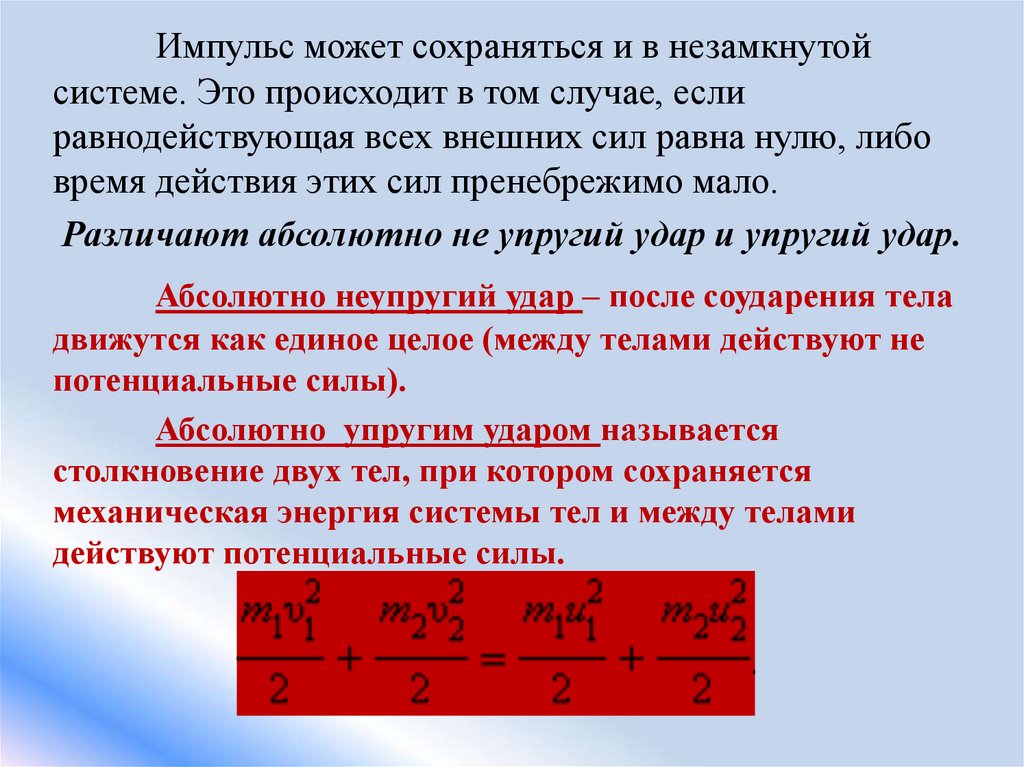
Импульс может сохраняться и в незамкнутойсистеме. Это происходит в том случае, если
равнодействующая всех внешних сил равна нулю, либо
время действия этих сил пренебрежимо мало.
Различают абсолютно не упругий удар и упругий удар.
Абсолютно неупругий удар – после соударения тела
движутся как единое целое (между телами действуют не
потенциальные силы).
Абсолютно упругим ударом называется
столкновение двух тел, при котором сохраняется
механическая энергия системы тел и между телами
действуют потенциальные силы.
22.
Если же удар неупругий, то механическая энергияполностью или частично переходит во внутреннюю энергию
сталкивающихся тел.
Следует подчеркнуть, что в обоих случаях выполняется
закон сохранения импульса.
Необходимым условием является использование
инерциальных систем отсчета.
Закон сохранения импульса позволяет рассматривать
взаимодействия тел, когда силы неизвестны.
Например: реактивное движение возникает. Когда от
тела отделяется и движется с некоторой скоростью, какая то его часть. Для движения ракеты не нужно
взаимодействие (колес с дорогой, корпуса с водой и т.д.).
Она движется в результате взаимодействия с газами выхлопами.
23.
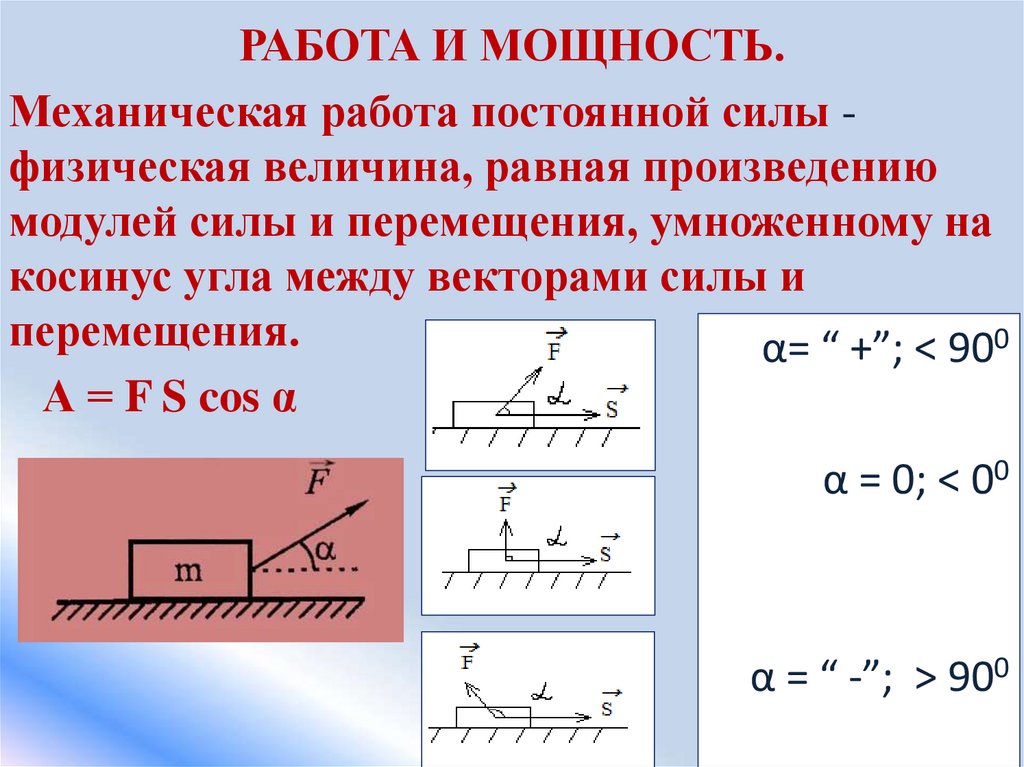
РАБОТА И МОЩНОСТЬ.Механическая работа постоянной силы физическая величина, равная произведению
модулей силы и перемещения, умноженному на
косинус угла между векторами силы и
перемещения.
α= “ +”; < 900
А = F S cos α
α = 0; < 00
α = “ -”; > 900
24. Мощность - быстрота совершения работы; - численно равна работе совершенной за единицу времени. - скалярная физическая величина.
N= А/∆t [N]=ВтКоэффициент полезного
действия (КПД) -
А
100
%
А - полезная работа.
А
А - затраченная работа.
пол
пол
зат
зат
25.
26.
Механическая энергия(от греческого energia - действие, деятельность)
- физическая величина, являющаяся
количественной мерой движения и
взаимодействия всех видов материи.
- характеризует способность тела совершать
работу.
Aвнеш. = ∆Е
[Е]= Дж
27.
1.Кинетическая энергия- энергия механического движения тела
(системы тел), равная половине произведения
массы тела на квадрат его скорости.
- ее значение зависит, как и значение скорости
от выбора системы отсчета.
Теорема о кинетической энергии:
-изменение кинетической энергии тела за некоторый
промежуток времени равно работе, совершенной за это время
силой (или равнодействующей сил), действующей на тело.
A = Ek2 – Ek1.
28.
2.Потенциальная энергия- энергия взаимодействия тел.
- например, взаимодействие тел с Землей
- величина, равная произведению массы тела на
ускорение свободного падения и высоту над
поверхностью Земли.
Ep = mgh.
Теорема о потенциальной энергии
- работа потенциальных (консервативных) сил равна
изменению потенциальной энергии, взятому с
обратным знаком.
A = –(Ep2 – Ep1).
Работа сил тяжести не зависит от длины и формы
траектории, а определяется только начальным и конечным
положением тела.
29.
Сила упругости также являетсяпотенциальной силой.
Энергия упруго деформированного тела потенциальная.
Потенциальная энергия деформированной
пружины равна:
Потенциальная энергия - вид энергии,
определяющейся взаимным расположением
тел.
30.
ПОЛНАЯ МЕХАНИЧЕСКАЯ ЭНЕРГИЯСИСТЕМЫ ТЕЛ.
Полная механическая энергия - величина равная
сумме кинетической и потенциальной энергий тел
системы.
Закон сохранения полной механической энергии:
- в любой замкнутой системе, в которой между
телами действуют только консервативные силы: в
замкнутой системе сумма кинетической и
потенциальной энергии тел остается неизменной.
- энергия не возникает из ничего и не исчезает в ни
куда, она может только переходить из одной формы в
другую.
Механическая энергия характеризует способность тел
совершать механическую работу.