









 Электроника
ЭлектроникаПохожие презентации:
")









Определения требование предъявляемые автоматизированным электромеханическим системам
1.
ПРАКТИЧЕСКАЯ РАБОТА № 1ТЕМА: ОПРЕДЕЛЕНИЯ ТРЕБОВАНИЕ
ПРЕДЪЯВЛЯЕМЫЕ
АВТОМАТИЗИРОВАННЫМ
ЭЛЕКТРОМЕХАНИЧЕСКИМ
СИСТЕМАМ
К
2.
Основные понятия и определенияЭлектромеханическая система – это совокупность электрических
двигателей, механических кинематических звеньев, передающих
движение от электродвигателя рабочему органу машины,
полупроводниковых преобразовательных устройств, контактных
электрических аппаратов управления и защиты, бесконтактных
устройств управления, микропроцессоров, - служащая для приведения
в действие рабочих органов технологической машины и управления
движением рабочих органов в соответствии с условиями
технологического процесса.
Автоматизированная
электромеханическая система – это
электромеханическая
система,
снабженная
устройствами
автоматического управления, обеспечивающими оптимальное (в
смысле производительности, качества производимой продукции,
минимизации материальных и энергетических затрат) управление
движением рабочих органов в соответствии с условиями
технологического
процесса
Научно-техническое
содержание
автоматизированной электромеханической системы составляет
автоматизированный электропривод.
Электропривод представляет собой электромеханическую систему,
предназначенную для приведения в движение рабочего органа
машины и управления ее технологическим процессом. Приведем
еще одно определение автоматизированного электропривода.
3.
Автоматизированный электропривод – это техническая система, состоящаяиз электродвигателя, силового полупроводникового преобразователя,
механического передаточного устройства, электрических и микроэлектронных
устройств управления; служащая для преобразования электрической энергии в
механическую, необходимую для осуществления данного технологического
процесса, и выполняющая функции управления этим процессом.
Общие требования, предъявляемые
к электроприводу
Требования к электроприводу формируются отдельно для каждого
производственного механизма или для группы идентичных механизмов. Но есть
общие требования, которые предъявляются к электроприводам всех
механизмов. К таким требованиям относятся:
Обеспечение заданного технологического процесса и требуемой
производительности.
Обеспечение требуемых условий пуска и торможения (в том числе по величине
ускорения) производственных механизмов, а при необходимости –
реверсирования и регулирования скорости.
Ограничение перегрузок, динамических и ударных нагрузок.
Принцип управления электроприводом (ручное, автоматическое, программное
и т.п.).
Требования по надежности, которые, как правило, отражаются в заданном
времени наработки на отказ.
Требования по конструктивной защищенности электрооборудования (степень
защиты IP), по условиям окружающей среды, климатическому исполнению.
4.
Экономические показатели; к экономическимпоказателям следует относить не только минимальную
стоимость электропривода, но и затраты электроэнергии
на его работу.
Экологические требования. К ним относят уровень шума и
ограничение влияния электропривода на питающую сеть,
связанное с реактивной мощностью и мощностью
искажения, вызванную высшими гармониками тока.
Обычно в требованиях указываются также параметры
электроснабжения (величина напряжения, частоты,
допустимые отклонения). Дополнительные требования
для конкретных групп машин приведены в
соответствующих главах данного раздела.
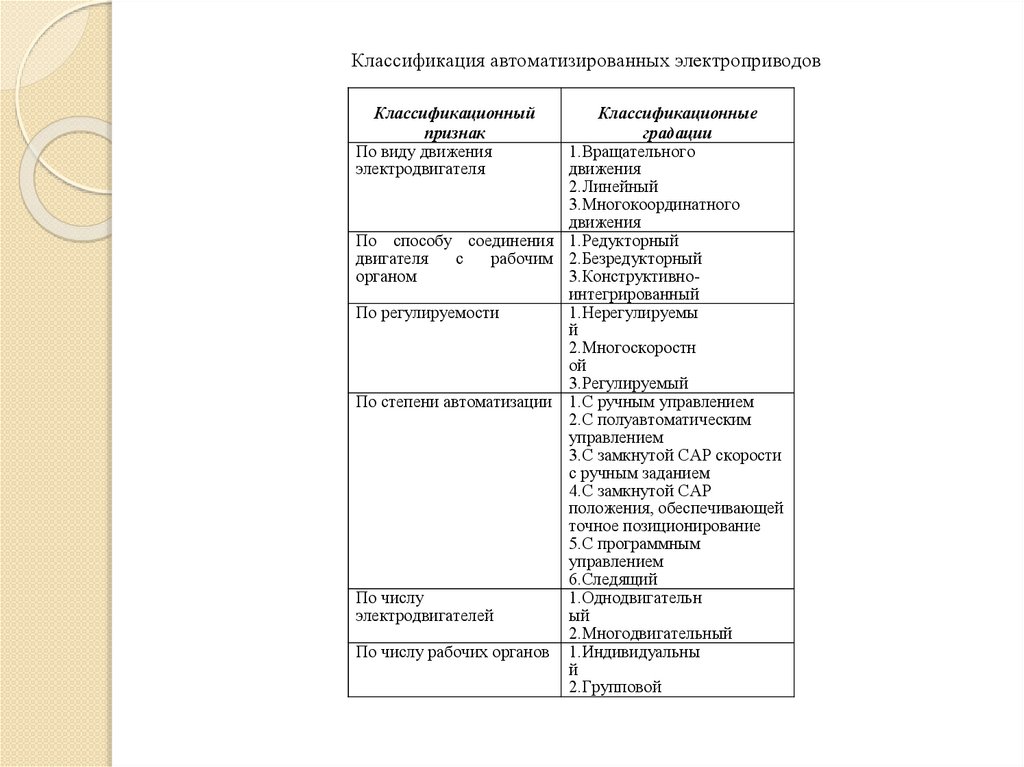
Классификация автоматизированных электроприводов
Электроприводы, используемые в различных
технологических установках, разнообразны по схемному и
конструктивному исполнению, что связано с большим
разнообразием рабочих машин. Классификация
электроприводов по отдельным признакам дана в таблице
1.1.
5.
Классификация автоматизированных электроприводовКлассификационный
признак
По виду движения
электродвигателя
Классификационные
градации
1.Вращательного
движения
2.Линейный
3.Многокоординатного
движения
По способу соединения 1.Редукторный
двигателя
с
рабочим 2.Безредукторный
органом
3.Конструктивноинтегрированный
По регулируемости
1.Нерегулируемы
й
2.Многоскоростн
ой
3.Регулируемый
По степени автоматизации 1.С ручным управлением
2.С полуавтоматическим
управлением
3.С замкнутой САР скорости
с ручным заданием
4.С замкнутой САР
положения, обеспечивающей
точное позиционирование
5.С программным
управлением
6.Следящий
По числу
1.Однодвигательн
электродвигателей
ый
2.Многодвигательный
По числу рабочих органов 1.Индивидуальны
й
2.Групповой