













 Электроника
ЭлектроникаПохожие презентации:










Основы мехатроники и робототехники
1.
National Research Tomsk State UniversityОсновы
мехатроники и робототехники
Горбенко Татьяна Ивановна
к.физ.-мат. наук, доцент кафедры
прикладной газовой динамики и
горения ФТФ ТГУ
2.
Направление подготовки 15.03.06 Мехатроника иробототехника,
профиль
Промышленная
и
специальная
робототехника
Мои учебные курсы по программе бакалавриата:
Основы мехатроники и робототехники
Теория механизмов и машин
Технология
автоматизированного
машиностроения и приборостроения
Технология роботизированного производства
3.
Мои научные интересы:Механика роботов и мехатронных систем.
БАКАЛАВРСКАЯ РАБОТА. 2019 г.
ИЗУЧЕНИЕ МЕТОДИКИ ПРОЕКТИРОВАНИЯ И
РАСЧЕТ ЗАХВАТНОГО УСТРОЙСТВА
ПРОМЫШЛЕННОГО РОБОТА
Енков Максим Олегович
Публикация:
РАСЧЕТ МЕХАНИЧЕСКОГО ЗАХВАТНОГО
УСТРОЙСТВА ПРОМЫШЛЕННОГО РОБОТА
Т. И. Горбенко, М. В. Горбенко, М. О. Енков
4.
Решетневские чтения [Электронный ресурс] : материалыXXIII Междунар. науч.-практ. конф., посвящ. памяти
генерального конструктора ракетно-космических систем
академика М. Ф. Решетнева (11–15 нояб. 2019, г.
Красноярск) : в 2 ч. / под общ. ред. Ю. Ю. Логинова. –
Электрон. текстовые дан. (1 файл: 21,1 МБ). – Систем. требования : Internet
Explorer; Acrobat
Reader 7.0 (или аналогичный продукт для чтения файлов формата .pdf) ;
СибГУ им. М. Ф. Решетнева. – Красноярск, 2019. – Ч. 1. –
Режим доступа:
https://reshetnev.sibsau.ru/page/materialykonfere
ntsii.
5.
Статья рекомендована на участиев XXI Международном конкурсе научных работ от
Фонда Роснаука.
6.
Какие вы можете назвать основные отраслипромышленности?
Какая
в
настоящее
время
отрасль
промышленности активно участвует в развитии всех
сфер человеческой деятельности?
7.
Робототехника–
область
науки
и
техники,
ориентированная на создание роботов и робототехнических
систем, построенных на базе мехатронных модулей
(информационно-сенсорных,
исполнительных
и
управляющих).
Современный термин «мехатроника» был введен
японской фирмой Yaskawa Electric в 1969 году и
зарегистрирован как торговая марка в 1972 году.
Это
название
получено
комбинацией
слов:
МЕХАТРОНИКА = МЕХАника + элекТРОНИКА.
Мехатронная система включает:
механическое устройство,
блок приводов,
устройство компьютерного управления,
информационное устройство.
8.
«Механика–
Мехатроника
–
Роботы
–
Роботизированные технологические комплексы» –
такова ведущая тенденция развития современного
машиностроения.
Робототехника находится в уникальном положении,
поскольку может синтезировать инновации и
разработки, уже прошедшие апробацию в других
отраслях – программном обеспечении (ПО), интернете,
производстве смартфонов, новых материалов и другом.
Одним
из
самых
заметных достижений
отечественной
робототехники и науки
стало создание КБ им.
Лавочкина «Лунохода1».
9.
10.
11.
История автоматизации производстваСовременная робототехника возникла во второй
половине XX столетия.
К роботам можно отнести почти любой современный
механизм, начиная от электрического чайника и
заканчивая сложнейшими механизмами, которые
производят себе подобных. В нашем мире уже
невозможно обойтись без автоматизированных линий
по производству автомобилей, компьютеров и многого
другого.
Термин «робот» славянского
происхождения.
Ввёл
его
известный писатель К. Чапек в
пьесе
«РУР»
(Россумские
универсальные роботы, 1920)
12.
Технический термин «промышленный робот»появился в 70-х годах XX столетия. Корни
робототехники уходят в глубокую древность, когда
были
предприняты
первые
попытки
создания
человекоподобных устройств, подвижных культовых
фигур, механических слуг…
Из древних отечественных
механизмов известны часы
«Павлин». И.П. Кулибин
смог
разобраться
в
хитросплетениях механизма
и
восстановить
часы
"Павлин" великого мастера
Джеймса
Кокса.
Часы
"Павлин«
–
шедевр
механики.
13.
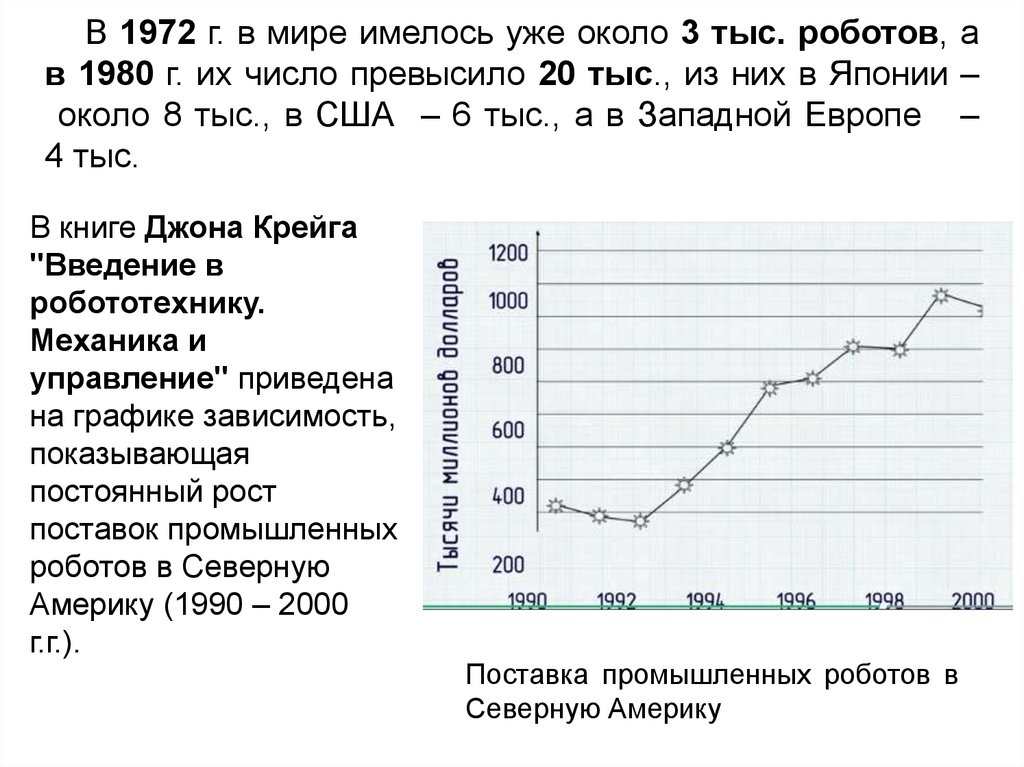
В 1972 г. в мире имелось уже около 3 тыс. роботов, ав 1980 г. их число превысило 20 тыс., из них в Японии –
около 8 тыс., в США – 6 тыс., а в Западной Европе –
4 тыс.
В книге Джона Крейга
"Введение в
робототехнику.
Механика и
управление" приведена
на графике зависимость,
показывающая
постоянный рост
поставок промышленных
роботов в Северную
Америку (1990 – 2000
г.г.).
Поставка промышленных роботов в
Северную Америку
14.
Главная причина все более широкого примененияроботов – снижение их стоимости. На следующем
графике можно видеть, что в 90-е годы прошлого
столетия цена на роботов постепенно падала, а затраты
на оплату человеческого труда возрастали.
Роботы не просто
дешевеют
–
они
становятся
более
эффективными:
более
точными,
быстрыми
и
гибкими.
Роботы
выполняют
все
больше
задач
опасных
или
невыполнимых для
человека.
Стоимость роботов в сравнении с затратами
на рабочую силу в 1990-е гг. (1990 год – 100%)
15.
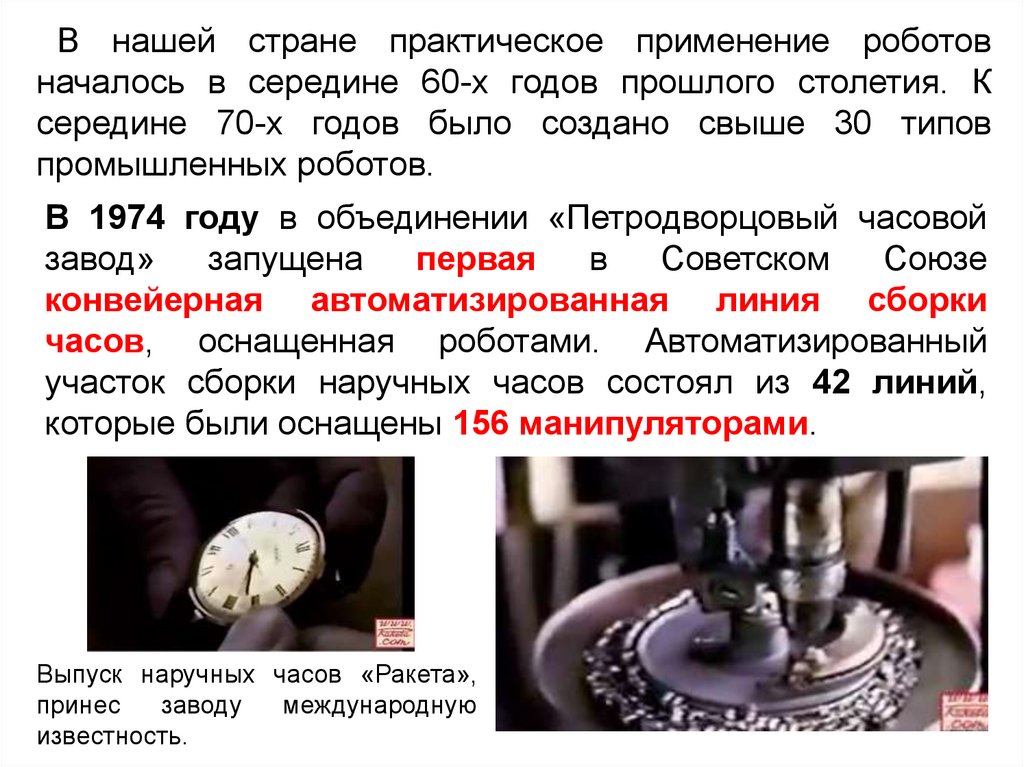
В нашей стране практическое применение роботовначалось в середине 60-х годов прошлого столетия. К
середине 70-х годов было создано свыше 30 типов
промышленных роботов.
В 1974 году в объединении «Петродворцовый часовой
завод»
запущена
первая
в
Советском
Союзе
конвейерная автоматизированная линия сборки
часов, оснащенная роботами. Автоматизированный
участок сборки наручных часов состоял из 42 линий,
которые были оснащены 156 манипуляторами.
Выпуск наручных часов «Ракета»,
принес
заводу
международную
известность.
16.
Роботизированные технологические комплексыспециального назначения
Технический прогресс в машиностроении во многом
определяет развитие всего хозяйства страны.
Наряду с развитием роботизации в машиностроении вплоть
до создания комплексно-автоматизированных цехов и заводов
ведутся
работы
по
внедрению
роботов
в
немашиностроительные отрасли, прежде всего в горную и
металлургическую промышленность, строительство, сельское
хозяйство, лёгкую и пищевую промышленность, транспорт,
медицину, освоение океана и космоса
Роботы специального назначения служат для выполнения
различного
вида
ремонтных,
восстановительных
и
спасательных работ в экстремальных условиях и ситуациях на
земле, на воде, под водой и в космосе, а также предупреждения
аварий, стихийных бедствий и ликвидации их последствий и др.
17.
В последние годы происходит роботизация буквальновсех сфер человеческой деятельности. Диапазон
применения робототехники чрезвычайно широк.
В настоящее время медицина становится одним из
главных векторов внедрения роботов и искусственного
интеллекта. Это связано с необходимостью восстановления
и поддержания трудового потенциала населения.
Главной целью развития
медицинской
робототехники
является
высокая
точность
и
качество обслуживания,
повышение
эффективности лечения,
уменьшение
рисков
нанесения вреда здоровью
человека.
18.
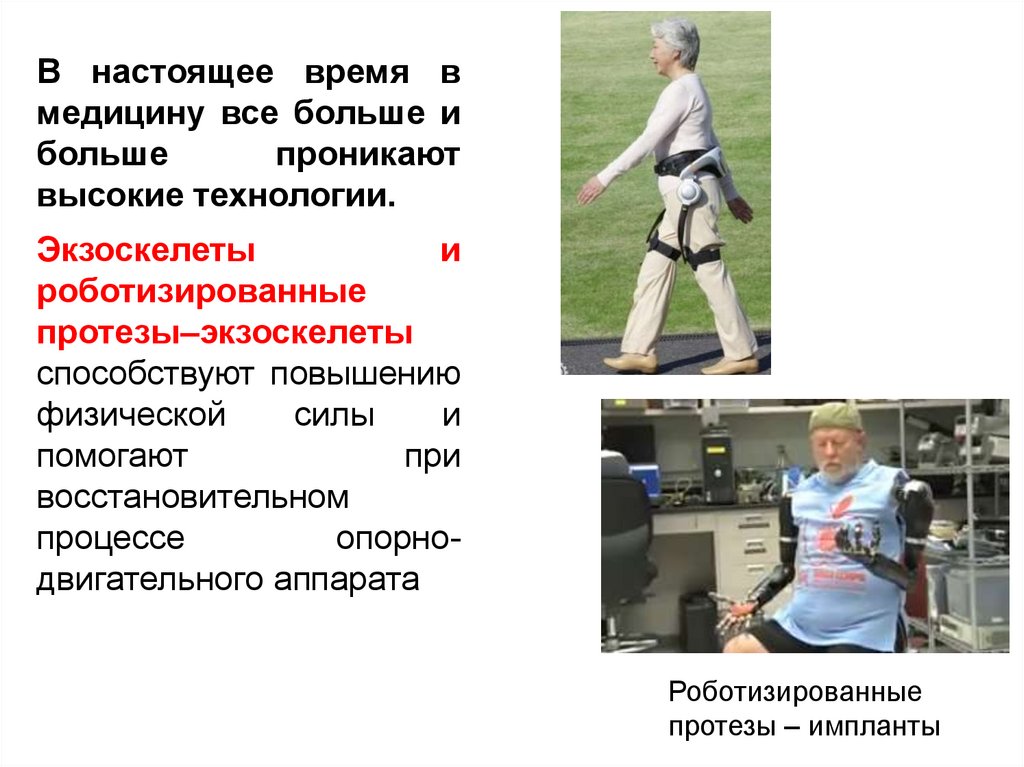
В настоящее время вмедицину все больше и
больше
проникают
высокие технологии.
Экзоскелеты
и
роботизированные
протезы–экзоскелеты
способствуют повышению
физической
силы
и
помогают
при
восстановительном
процессе
опорнодвигательного аппарата
Роботизированные
протезы – импланты
19.
Роботы для исследования труднодоступных местна суше и под водой
Для проведения осмотра и
анализа
труднодоступных
мест
ученые
разных
лабораторий
разработали
модульного
робота-змею.
Робот может пролазить в
различные узкие трубы и
соединительные
системы.
Робот оснащен видеокамерой
и светодиодным индикатором
на
голове
и
может
предоставлять
экспертные
данные о ситуации в тех или
иных труднодоступных местах.
20.
Для проведения исследований на суше и под водойприменяют роботы-амфибии.
Краб перемещается с
помощью винтов, а как
только достигает дна, в дело
вступают три пары ног.
Змееподобный
роботамфибия составлен из
нескольких
модулей,
каждый из которых имеет
свое микропроцессорное
устройство.
21.
Роботы, способные переносить значительные грузы идвигаться в сложных условиях бездорожья, где не
способен передвигаться обычный транспорт.
22.
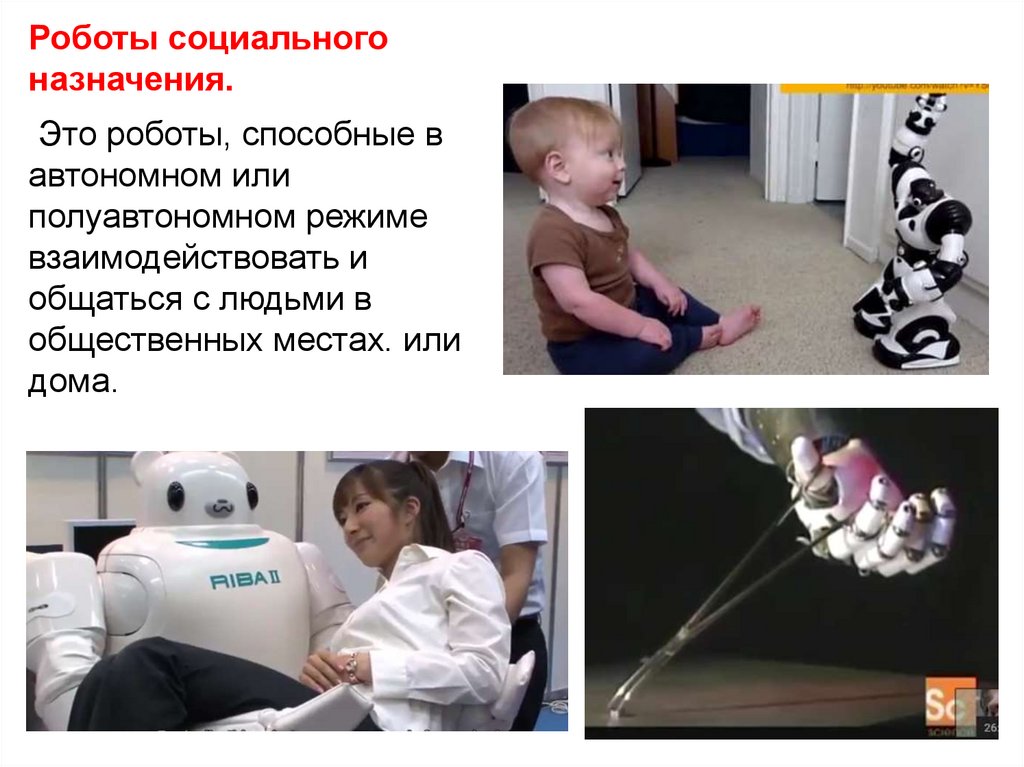
Роботы социальногоназначения.
Это роботы, способные в
автономном или
полуавтономном режиме
взаимодействовать и
общаться с людьми в
общественных местах. или
дома.
23.
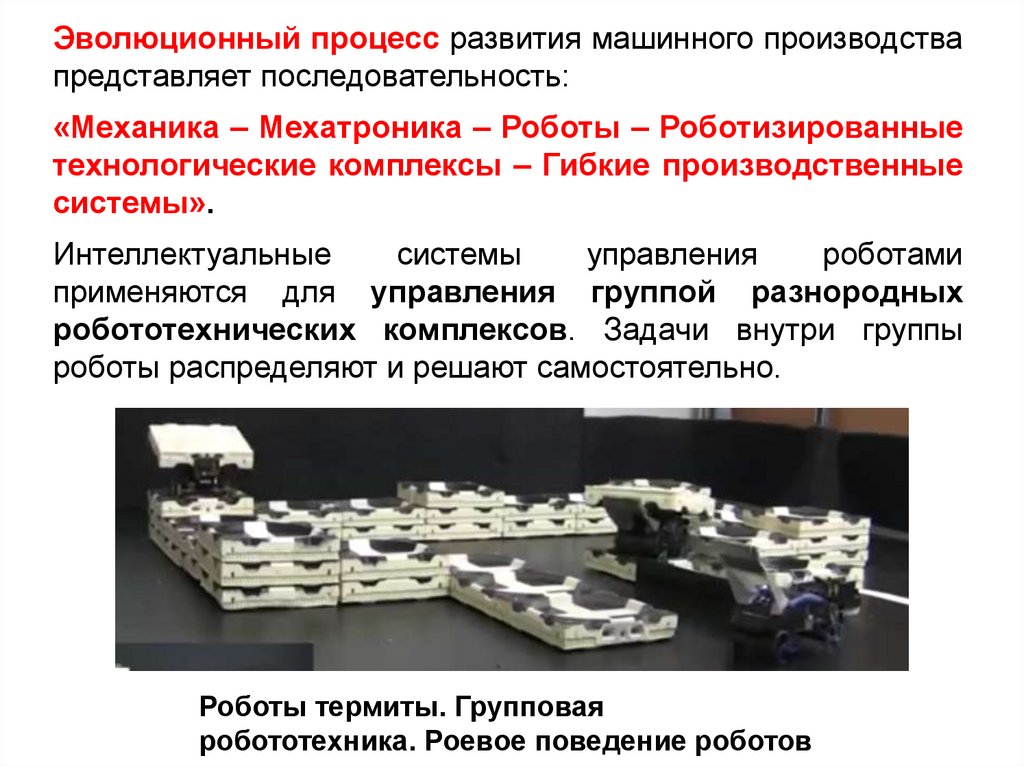
Эволюционный процесс развития машинного производствапредставляет последовательность:
«Механика – Мехатроника – Роботы – Роботизированные
технологические комплексы – Гибкие производственные
системы».
Интеллектуальные
системы
управления
роботами
применяются для управления группой разнородных
робототехнических комплексов. Задачи внутри группы
роботы распределяют и решают самостоятельно.
Роботы термиты. Групповая
робототехника. Роевое поведение роботов
24.
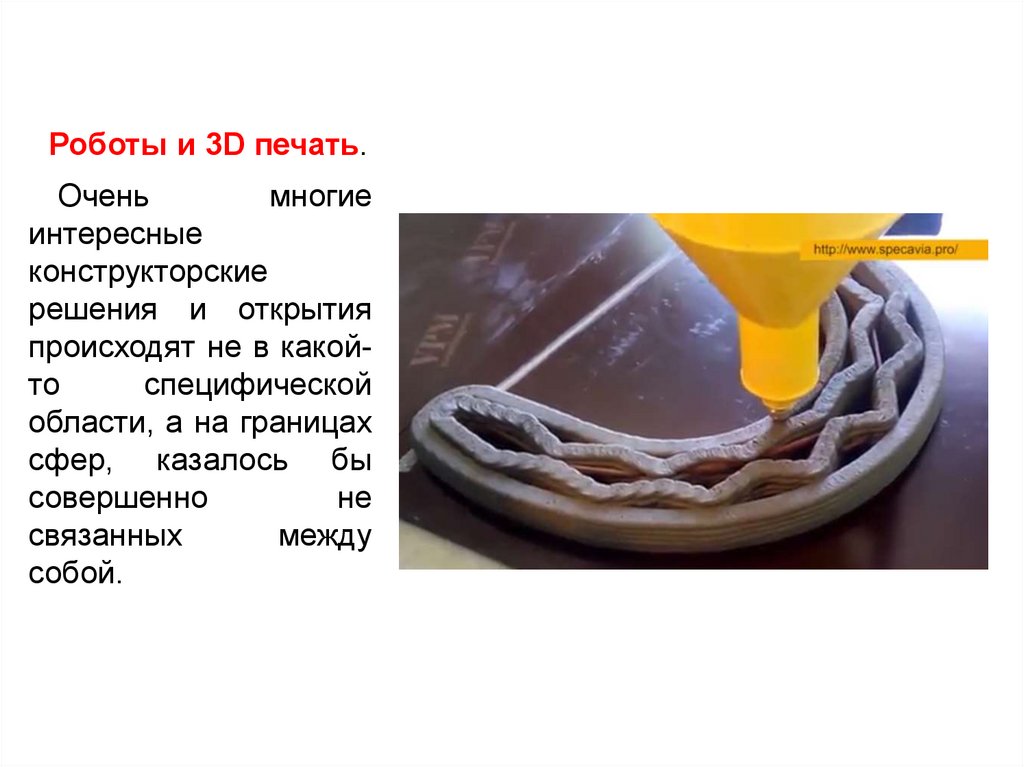
Роботы и 3D печать.Очень
многие
интересные
конструкторские
решения и открытия
происходят не в какойто
специфической
области, а на границах
сфер, казалось бы
совершенно
не
связанных
между
собой.
25.
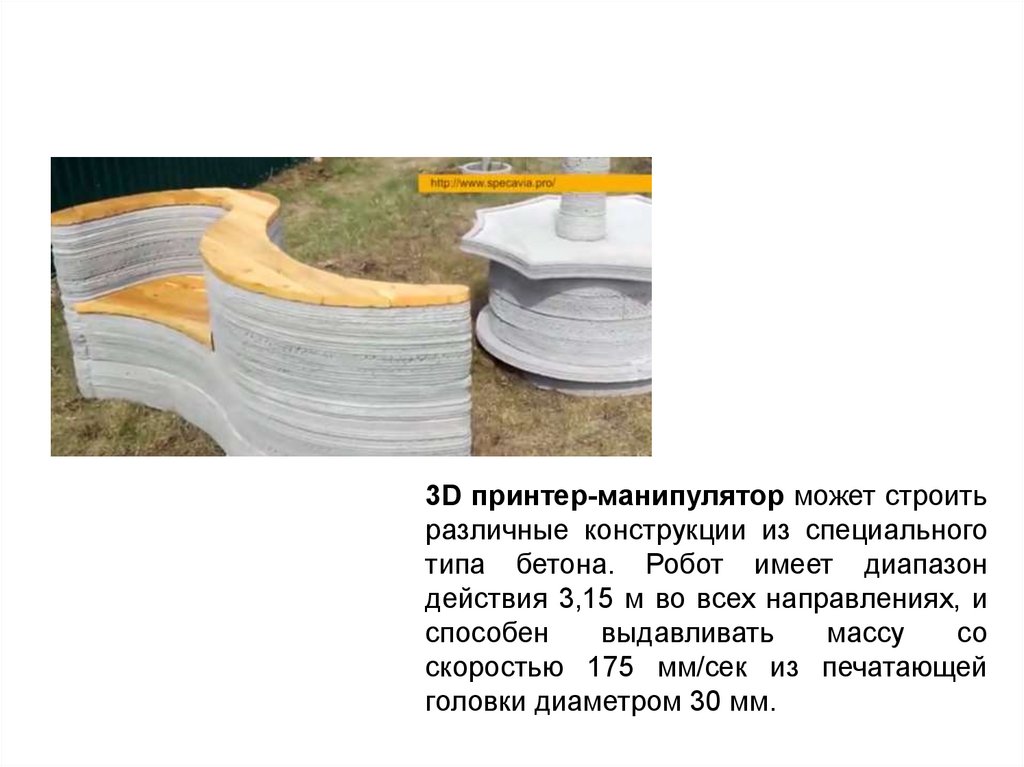
3D принтер-манипулятор может строитьразличные конструкции из специального
типа бетона. Робот имеет диапазон
действия 3,15 м во всех направлениях, и
способен
выдавливать
массу
со
скоростью 175 мм/сек из печатающей
головки диаметром 30 мм.
26.
Внастоящее
время
эволюционный
процесс
развития
машинного
производства
можно
представить
следующей
схемой.