






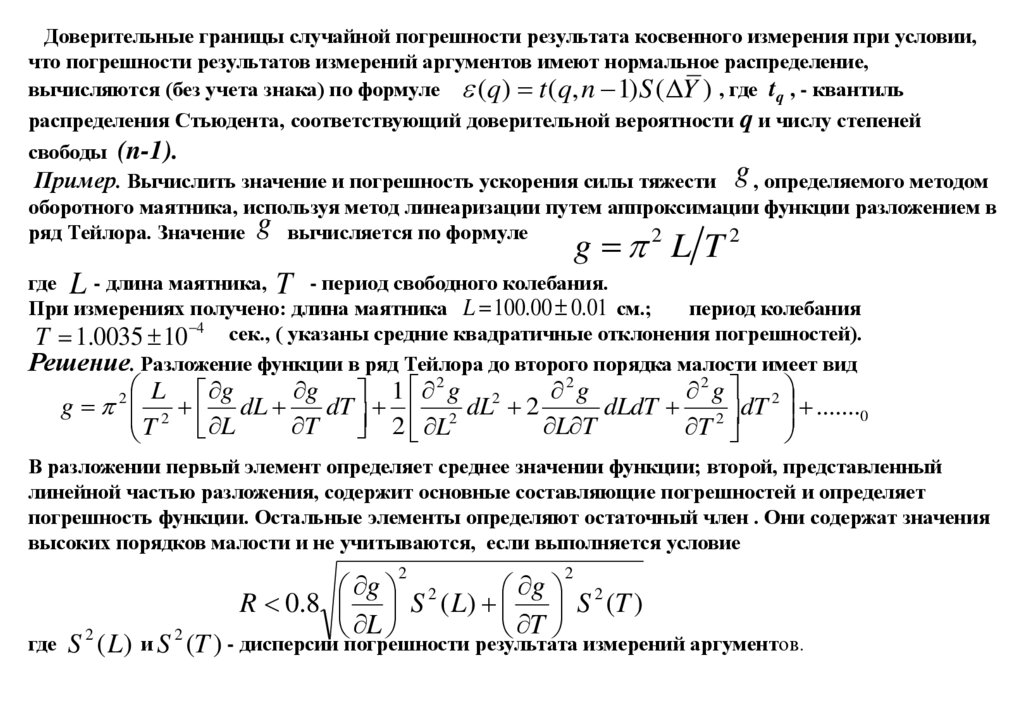
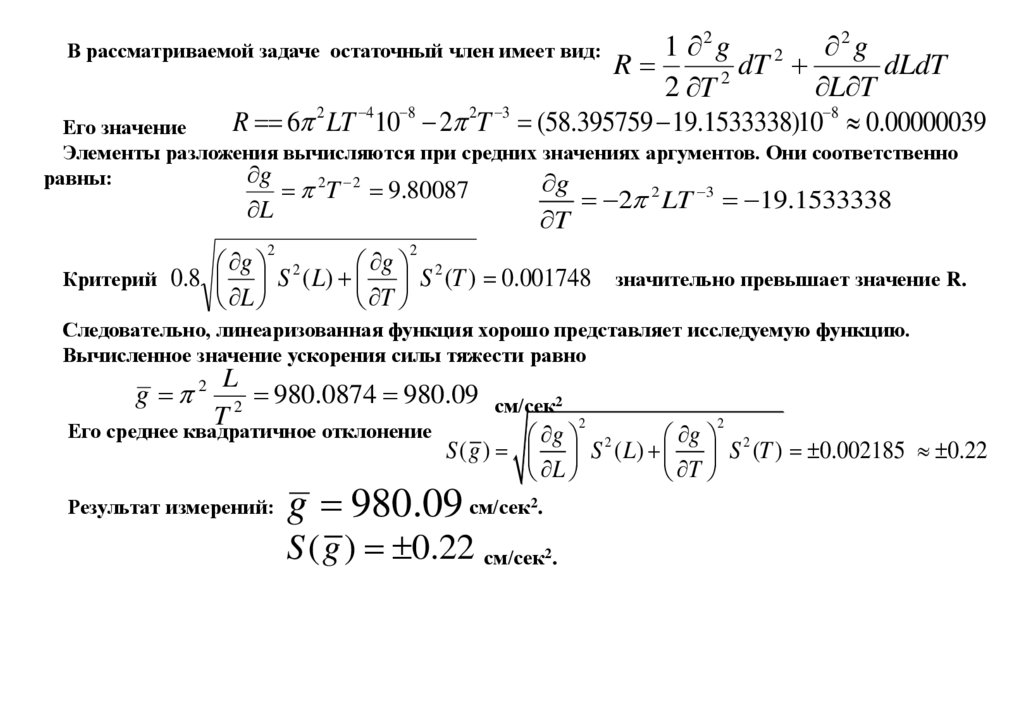
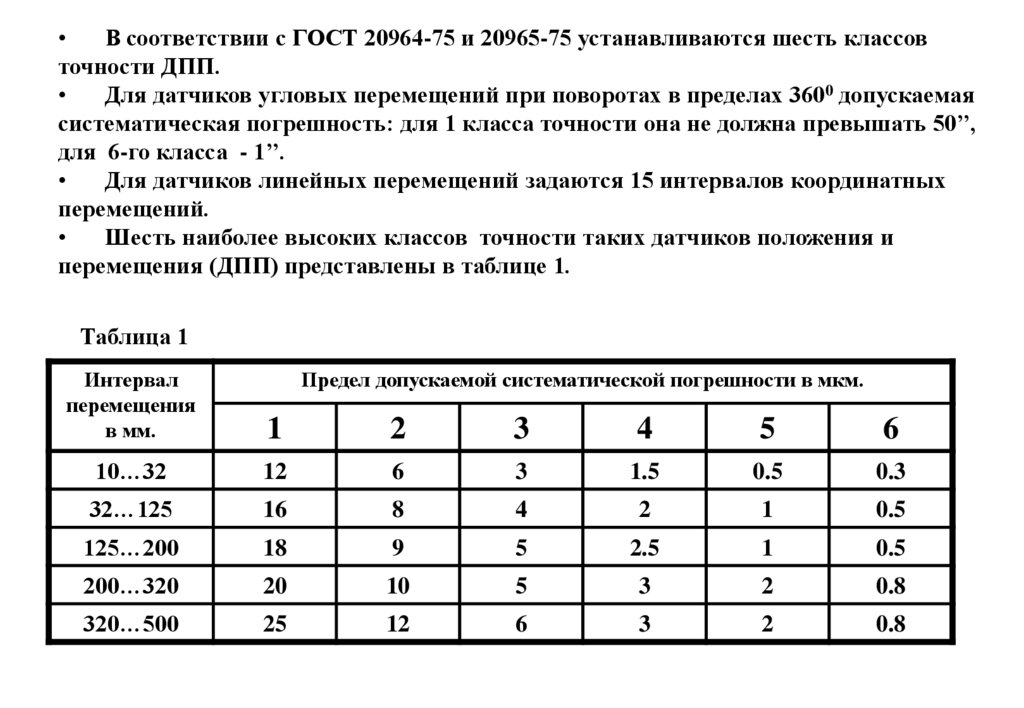
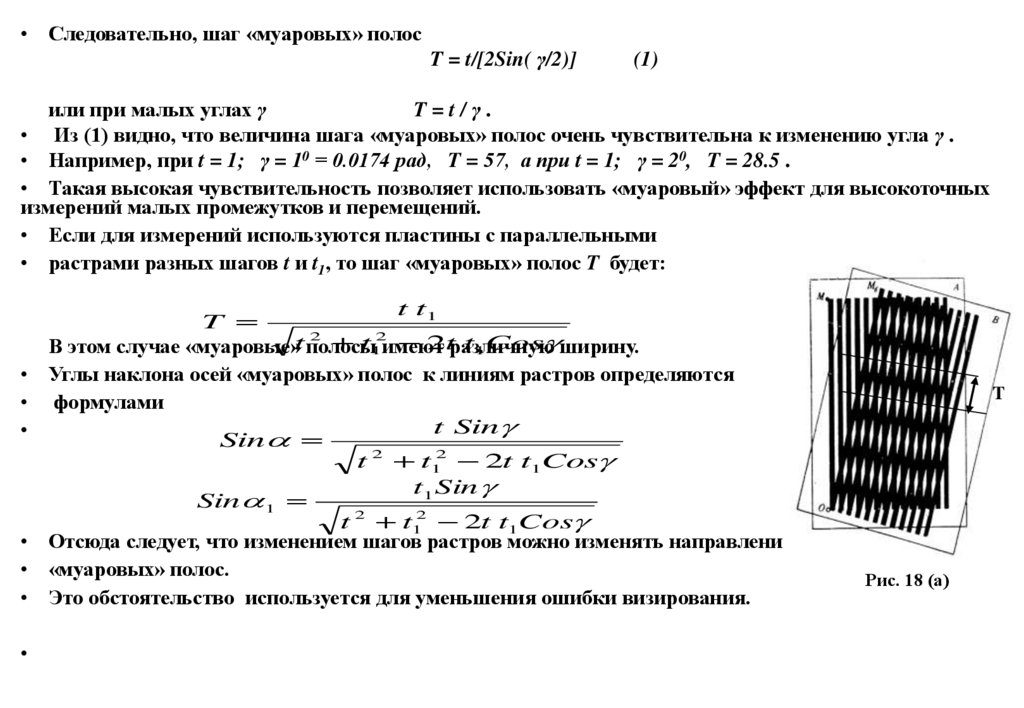
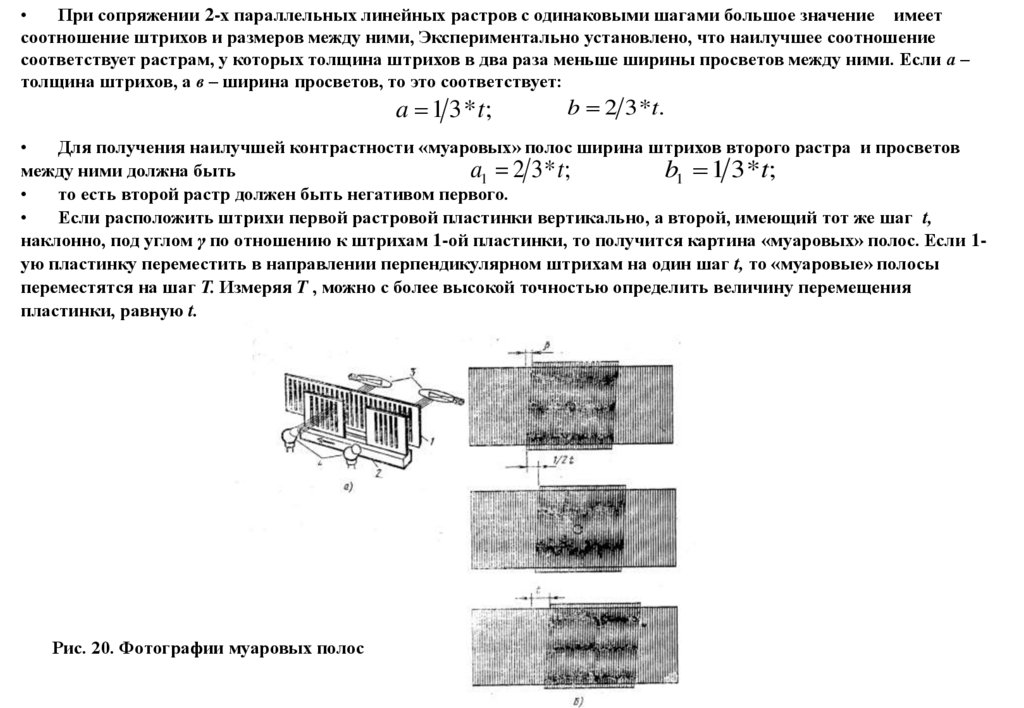
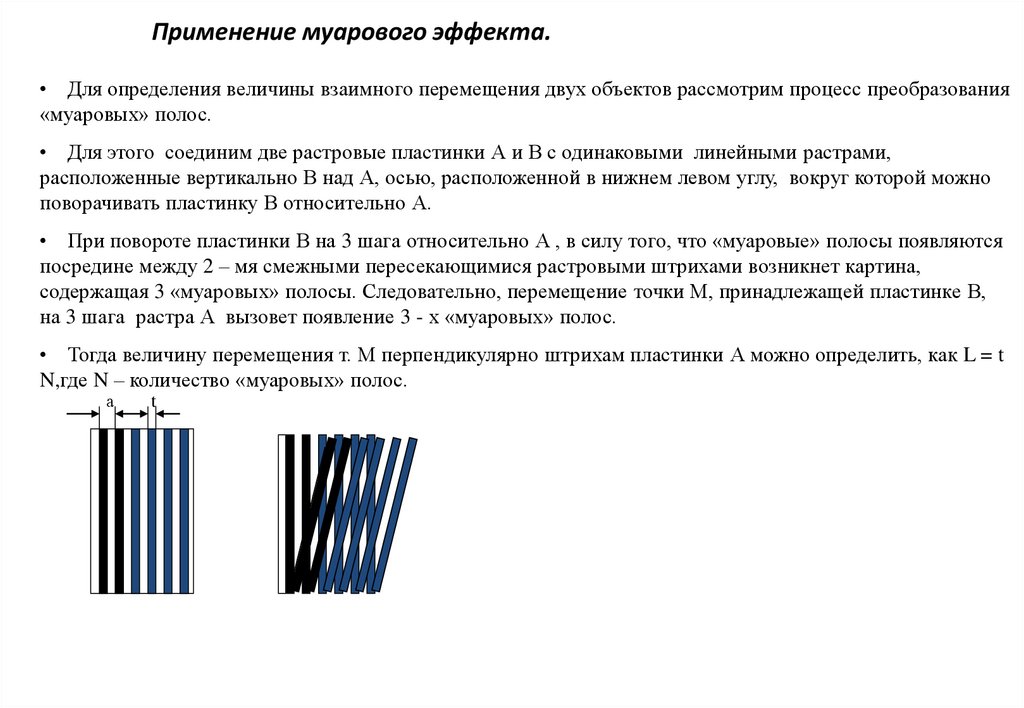
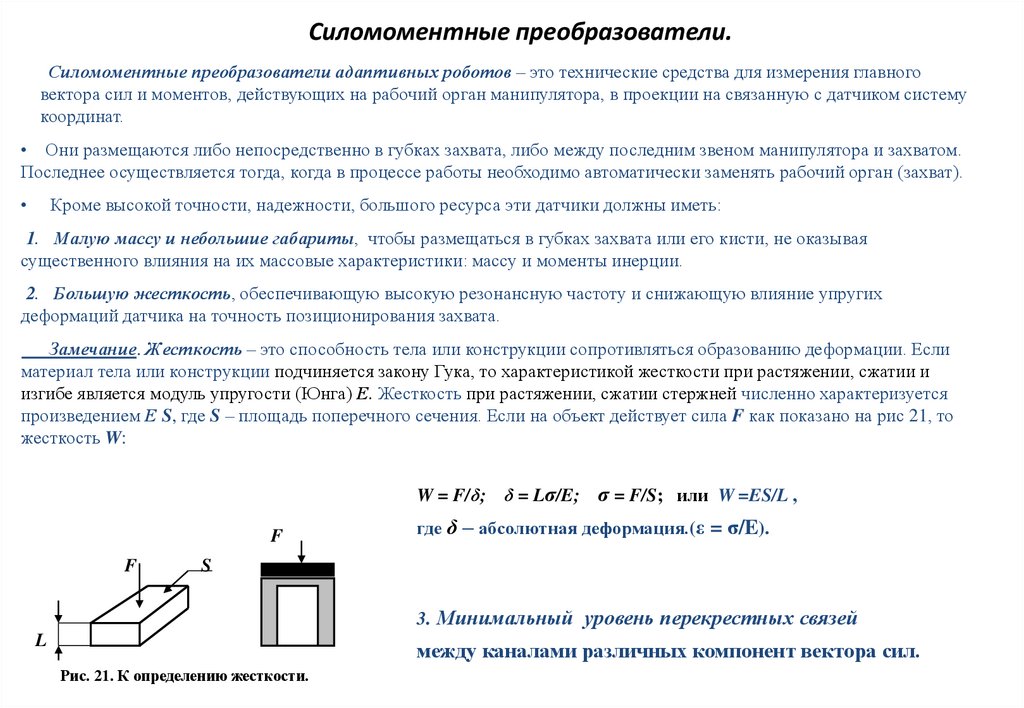
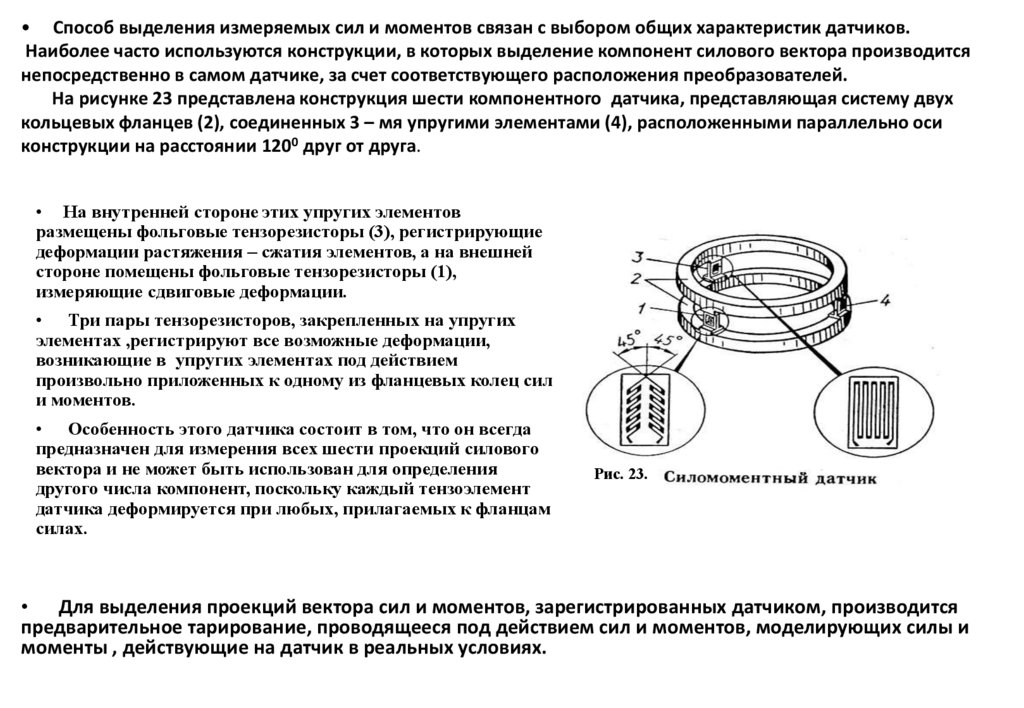
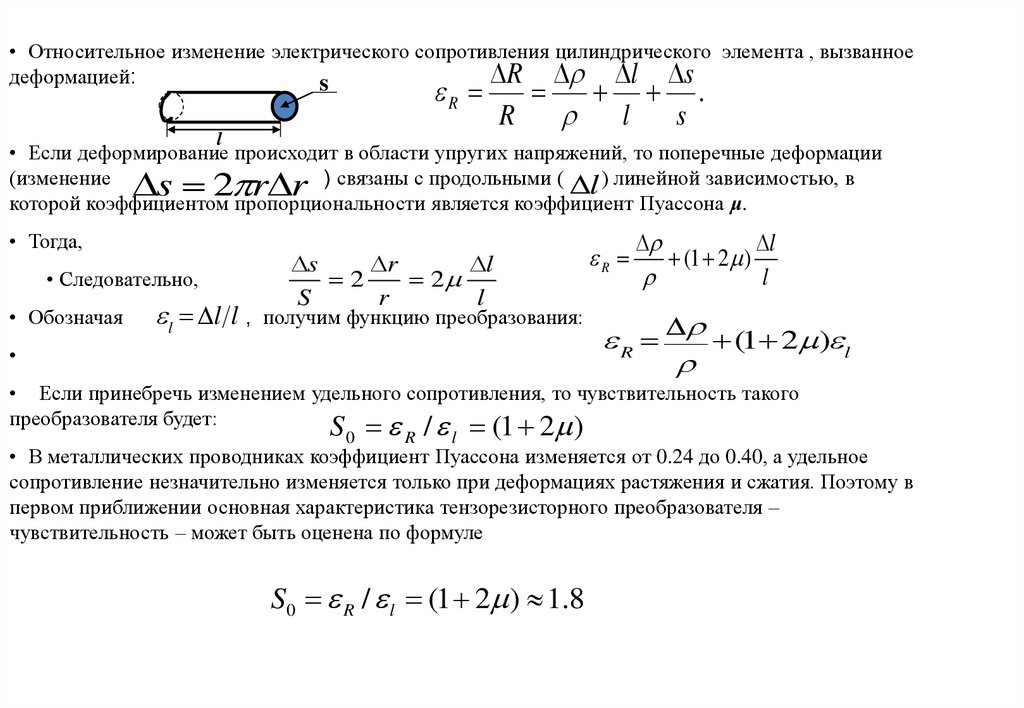
 ИС.")

.")





.")



















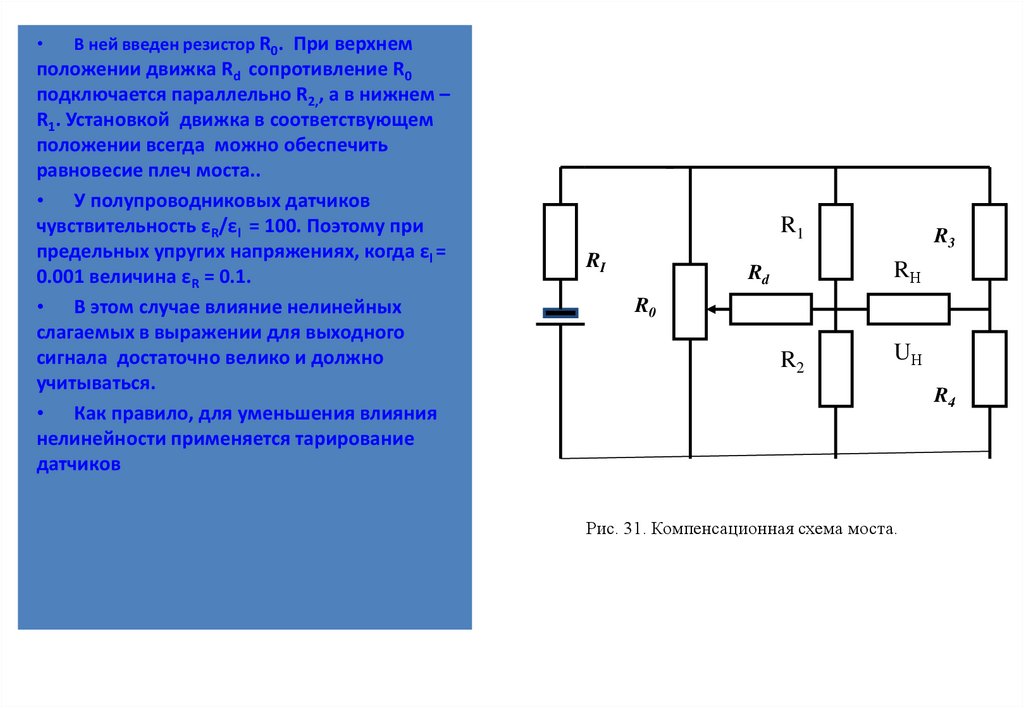










. На выходе системы существует напряжение U, пропорциональное измеренному значению")






 на приборах с зарядовой связью (ПЗС).")









 Электроника
ЭлектроникаПохожие презентации:
")









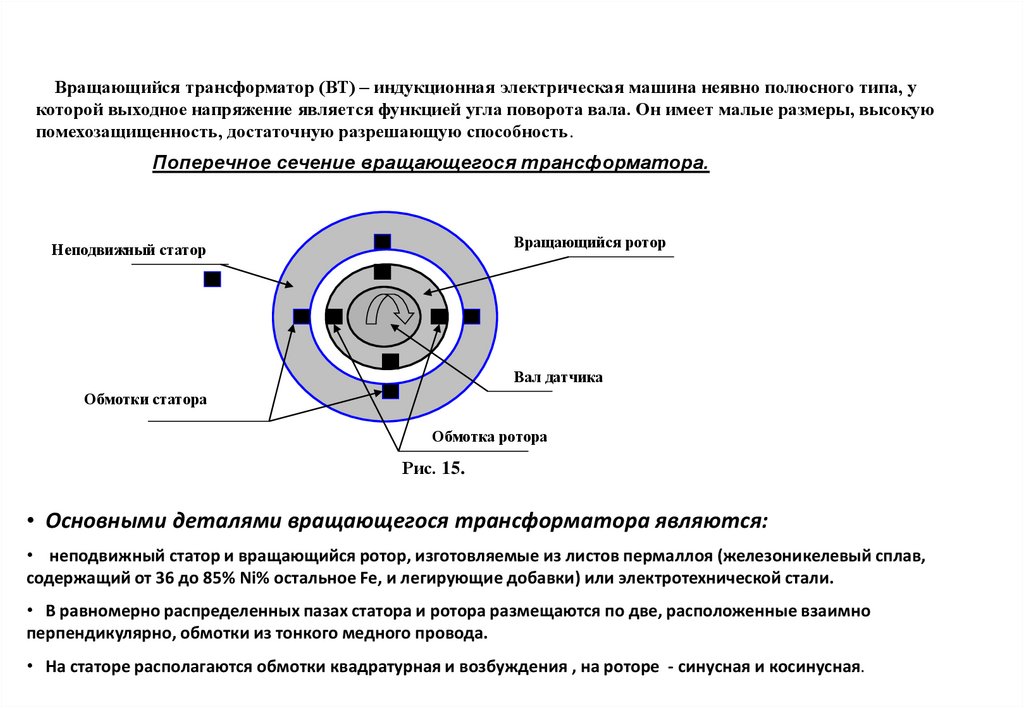
Информационно-измерительные системы
1. Информационно – измерительные системы
Учебный курс2.
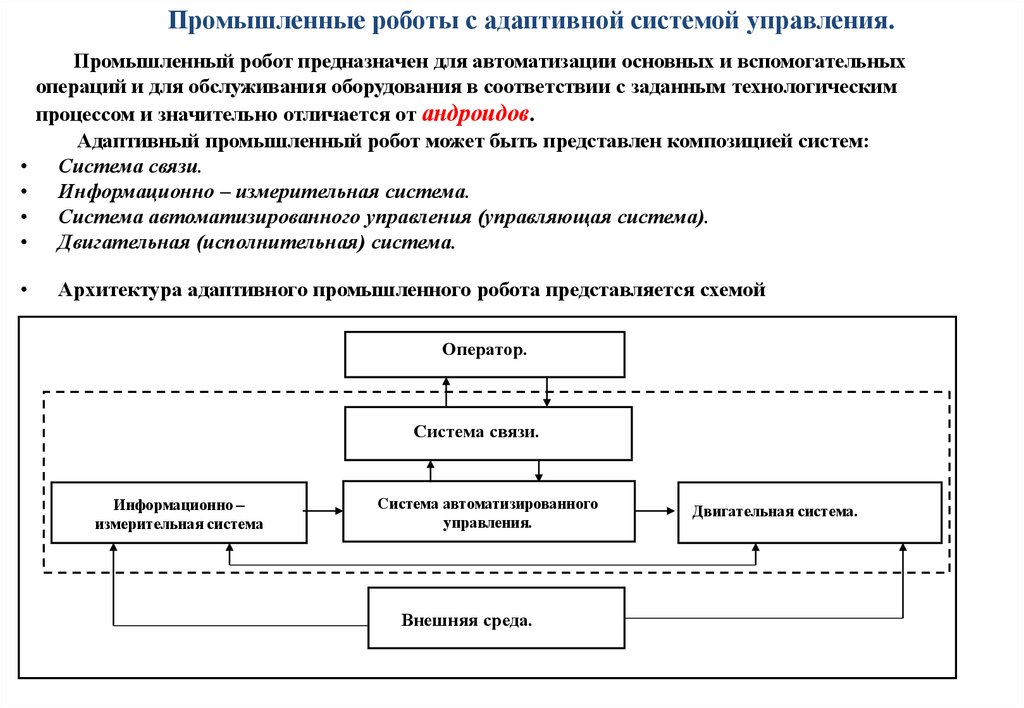
Промышленная робототехника и робототехническиекомплексы»
Мехатроника – область науки и техники, основанная на
системном объединении узлов точной механики, датчиков состояния
внешней среды и самого объекта, источников энергии,
исполнительных механизмов, усилителей, вычислительных устройств
(ЭВМ и микропроцессоры).
Робототехника – область науки и техники, ориентированная на
создание роботов и робототехнических систем, построенных на базе
мехатронных модулей (информационно-сенсорных, исполнительных и
управляющих).
3.
•Механотроника --синергическая интеграция механики, электроники и компьютерных технологий. Может бытьклассифицирована как предмет кибернетики. Механотроника – это комплекс наук об интеллектуальном управлении
механическим движением систем, включающих в свою структуру информационно-вычислительные и механические
компоненты.
•Законы механотроники – это законы управляемого от компьютера механического движения, законы преобразования
энергии и подчиненного преобразования информации.
•Оригинальное определение Yasakawa Electric для термина «механотроника» звучит так: «Слово
«механотроника» образовано от mecha – механизм и tronics – электроника. Иными словами, мы говорим о
технологии и созданных на ее основе продуктах, в которых электроника проникает в традиционные механизмы
так глубоко, что наступает момент, когда трудно провести границу, отделяющую механизм от электроники».
Впоследствии безликий термин «электроника» был уточнен, и механотроника приобрела интеллект – в
результате тесного, взаимопроникающего объединения встраиваемой микрокомпьютерной системы и
механического устройства появились конструкции, немеханотронные аналоги которых просто невозможны.
Более того, в современных механотронных устройствах объединение soft- и hard-составляющих настолько
тесное, что это проявляется с самых первых этапов проектирования таких устройств – в отличие от
существовавших ранее своих электромеханических предшественников они проектируются как единое целое.
Последнее окончательно подтвердило законность нового слова, придуманного специалистами Yasakawa Electric,
и сегодня механотроника – не только самостоятельная научно-инженерная дисциплина, курсы которой читают
в ведущих университетах и технических колледжах мира, но и настоящий «стиль жизни современного
инженера-практика» (именно так о ней говорится в книге «The Mechatronics Handbook»)
•Механотроника (mechatronics), яп. термин для описания технологий, возникших на стыке электротехники,
машиностроения и программного обеспечения. М. включает проектирование, произ-во и изучение
функционирования машин с «разумным» поведением, т.е. действующих по заданной программе, их связи с др.
машинами, (искусственный интеллект, измерительное оборудование, эргономика и системы управления). Разл.
бытовые электронные изделия, напр, видео- и аудиотехника, автоматич. фотоаппараты с цифровой электроникой и
точными механич. системами, роботы (робототехника) для автоматизации произв. систем, автоматич. управляемые
трансп. ср-ва также являются примерами М.
4.
Робототехнические системы.Назначение информационных устройств и систем РТК;
их классификация, состав, функциональные схемы;
датчики информационных систем, применяемых в робототехнике;
организация микропроцессорной системы обработки данных;
алгоритмическое и программное обеспечение информационных
систем роботов и РТС;
способы анализа информации, первичная обработка;
системы технического зрения;
системы силомоментного очувствления, связь сенсорной системы с
системой управления;
архитектура адаптивной робототехнической системы.
5.
ВВосстановление робота Электроника НЦТМ-30 Вращение в пространстве
И
Информационные устройства и системы в мехатронике и робототехнике Исполнительные устройства мехатронных
систем/роботов
К
Конструирование мехатронных модулей
М
Методы искусственного интеллекта Микропроцессорная техника
Микропроцессорные устройства управления роботов и их программное обеспечение
Моделирование и исследование роботов и робототехнических систем
О
Основы мехатроники и робототехники
П
Приводы роботов Применение мехатронных систем Проектирование мехатронных и робототехнических систем
Р
Роботизированные подводные аппараты Роботы в медицине Роботы для освоения космоса
Роботизированные технологические комплексы для транспортировки и складирования изделий в производстве
С
Создание стенда для изучения работы ассинхронного двигателя
С (продолжение)
Сравнительный анализ функциональных возможностей роботов разных поколений
Т
Технология роботизированного производства
У
Управление мехатронными и робототехническими системами
Устройства передвижения мехатронных систем/роботов Устройства управления мехатронных систем/роботов
Ф
Факультет робототехники
Э
Электромеханические и мехатронные систем
6.
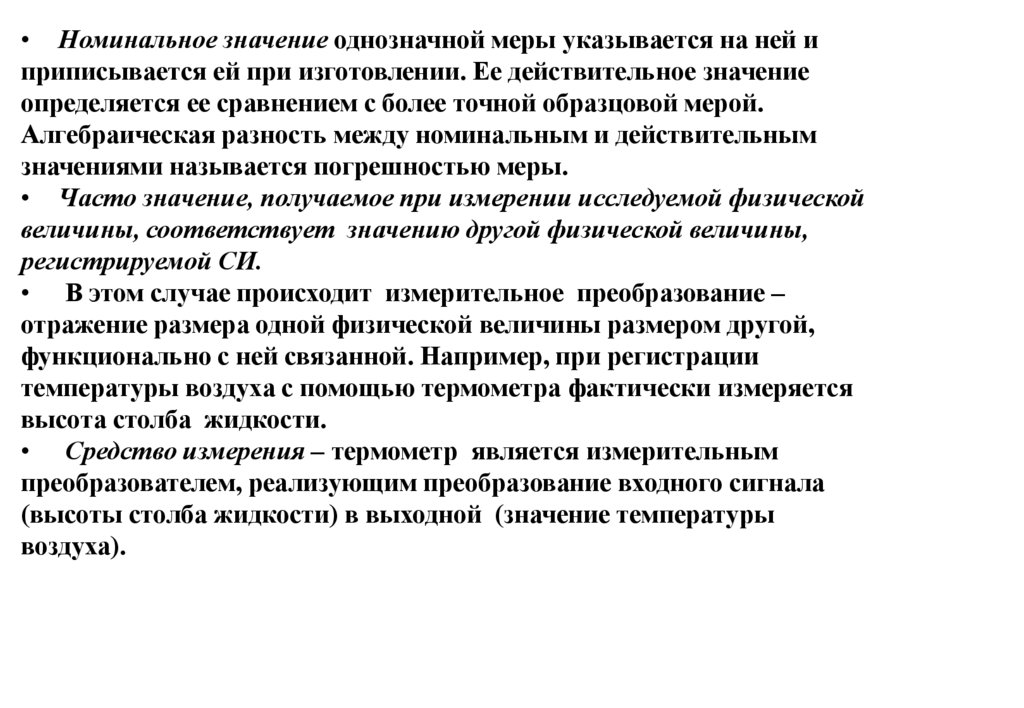
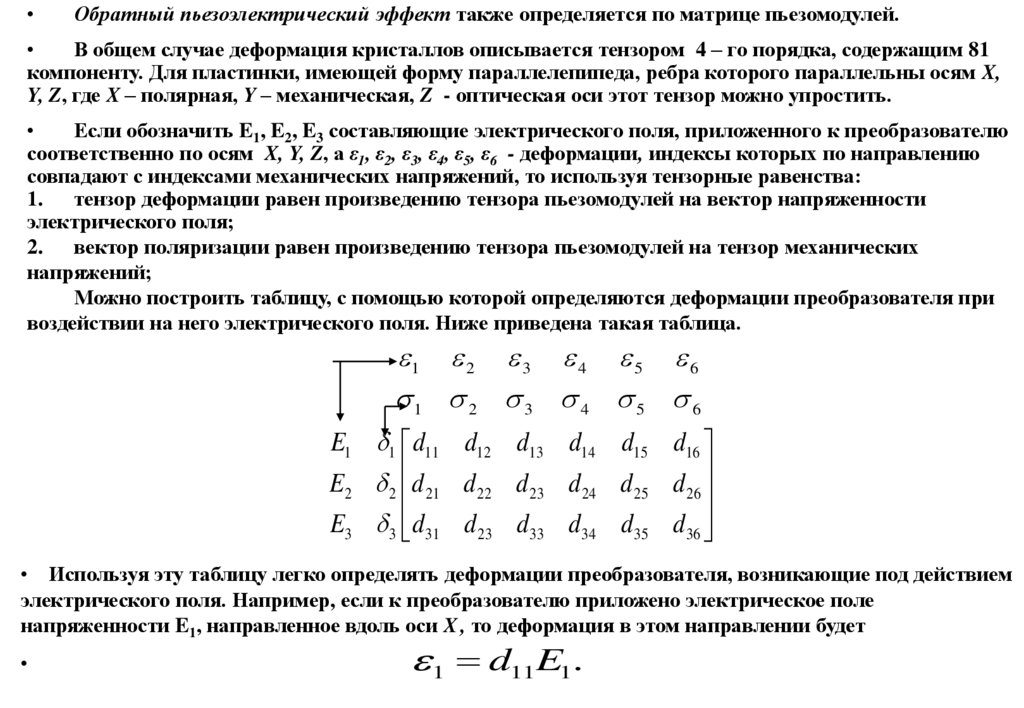
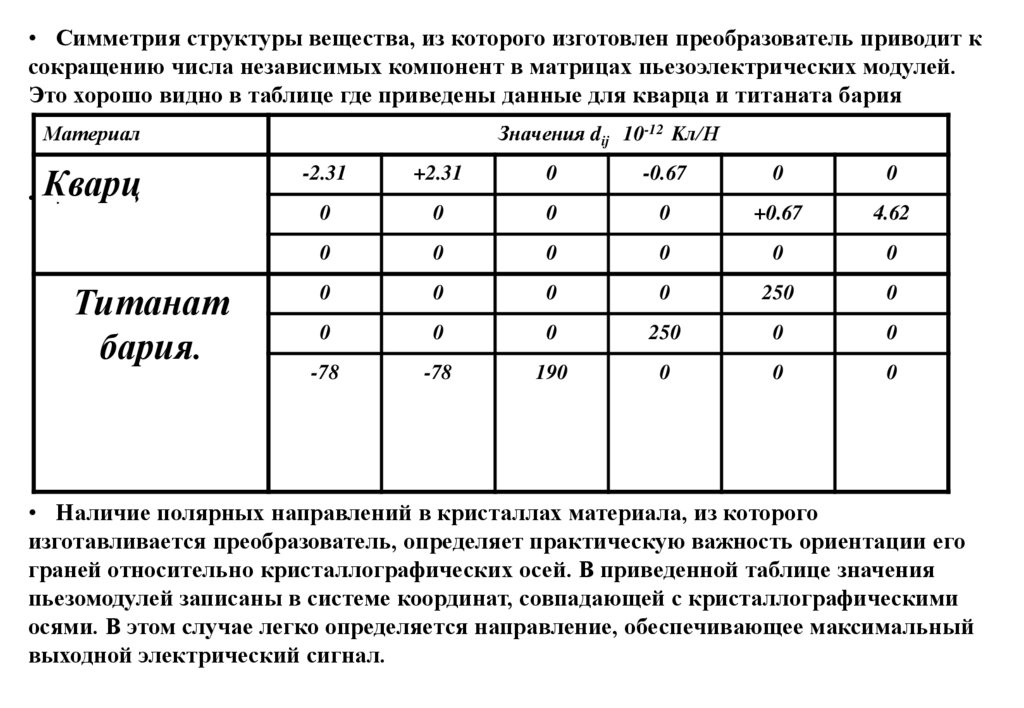
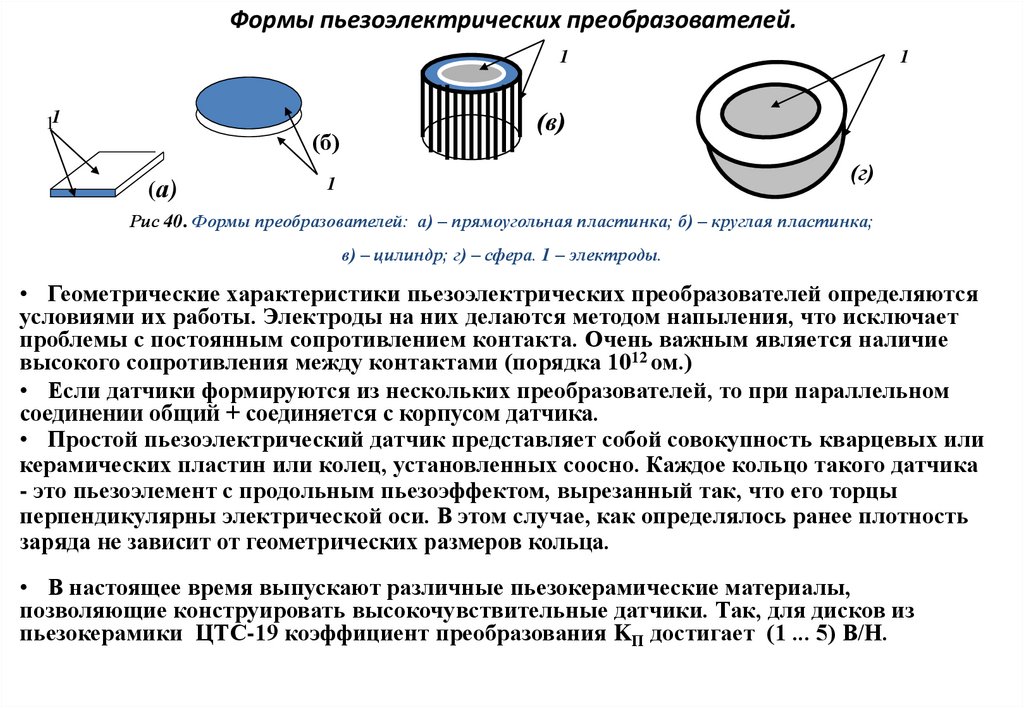
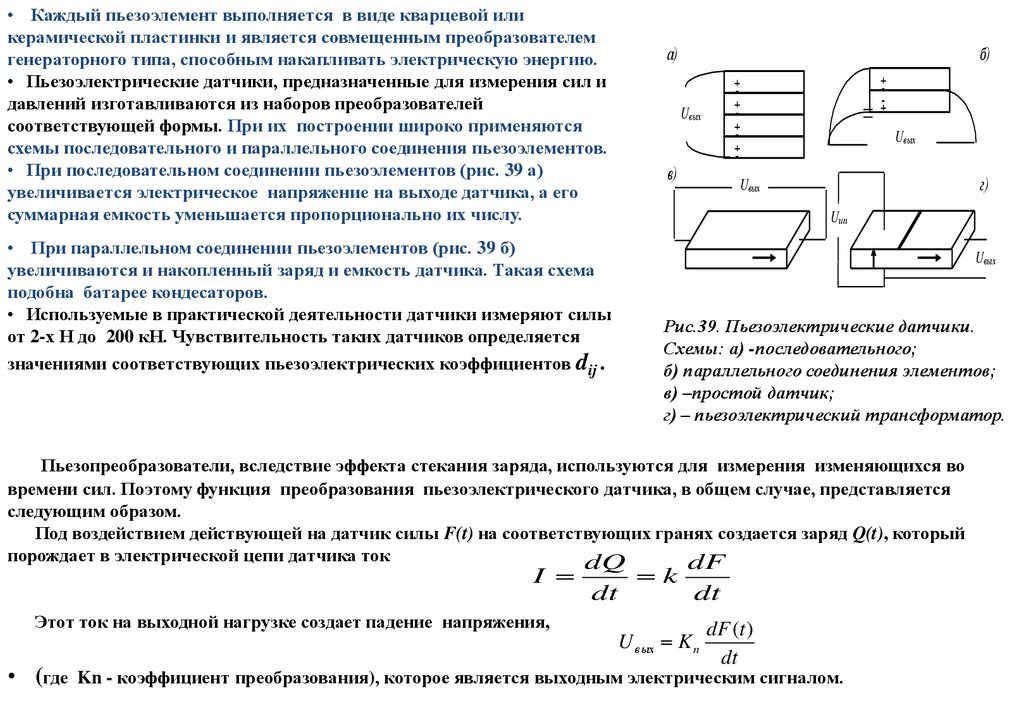
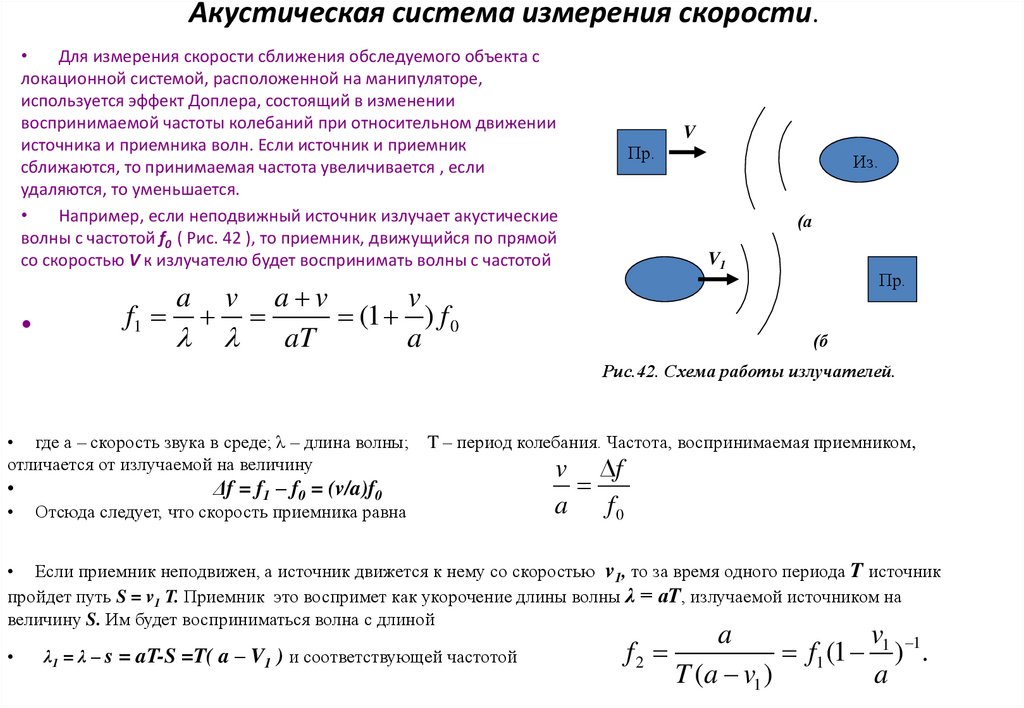
Общие сведения.• Любая практическая деятельность человека (исполнителя)связана с получением и
обработкой информации, под которой понимаются сведения об исследуемом объекте,
полученные в процессе взаимодействия с ним. Эти сведения создаются и формируются
непосредственно на исследуемом объекте в виде сигналов и передаются исполнителю.
• Эти сигналы, содержащие данные о характеристиках объекта, регистрируются
исполнителем, получаемая информация при необходимости обрабатывается, то есть
представляется в виде пригодном для хранения или практического применения.
• В каждой области науки и производственной деятельности: образовании,
экономике, экологии, машиностроении, добывающих отраслях, транспорте,
управлении и др. существует совокупность идей и методов, предназначенных для
целенаправленной и эффективной обработки получаемой информации и ее
эффективном использовании.
• Для каждой области средства и методы обработки как и принципы их реализации
имеют свои специфические особенности, обусловленные конкретным видом носителя
информации, методами кодирования и способами представления результатов.
• Однако, в любом случае используются общие принципы построения систем
обработки. В предлагаемом курсе рассматриваются общие свойства информационно –
измерительных систем: методы и средства получения результатов измерений, анализ и
обработка их и представление исполнителю в виде соответствующей информации для
хранения или использования.
7.
• На первом этапе решения этой задачи фиксируется факт поступления информации. Вэтом случае обработка состоит в определении факта ее поступления в ИИС (задача
обнаружения).
• Поскольку поток данных на приемное устройство поступает всегда, то получаемые исполнителем
сведения, наряду с полезной информацией, содержат дополнительную составляющую
(помеху), которая искажает представление об исследуемом объекте.
• При этом, полные сведения о помехе отсутствуют.
• На втором этапе обработки решается задача наиболее полного исключении помехи
(задача выделения) и преобразования полученных данных к виду, пригодному для их
использования.
• Выделенная полезная информация (исполнителем) используется по назначению.
• В том случае, когда анализ полученной информации используется для принятия какоголибо решения, то
• Если информация зафиксирована, и полезный сигнал выделен, но в полученной
информации нет всего необходимого, для принятия единственного правильного решения,
то задача обработки состоит в таком анализе информации, при котором принимается
решение, удовлетворяющее поставленным требованиям (задача принятия решения).
• Если получаемая информация используется для получения управляющих сигналов в
динамической системе, то обработка предполагает измерение параметров объекта и их
регулирование при обеспечении деятельности этой системы.
• Таким образом, термин "обработка" в дальнейшем рассматривается в широком смысле.
Под ним понимается регистрация, запоминание, преобразование и представление данных.
8.
• Информационно- измерительные системы применяют :• автономно для сбора и обработки данных о движущихся объектах,
внешней среде, манипуляциях с объектами и др.,
• в составе различных автоматизированных комплексов.
• Независимо от назначения и конкретного применения общее требование
к ИИС состоит в том, чтобы исходная измерительная информация или
сообщения, вводимые в систему, могли быть восстановлены без искажений.
• Для большинства современных ИИС обязательным также является
требование передачи и обработки информации в реальном масштабе
времени.
• Основной базой создания используемых методов обработки информации
является механотроника, а также разделы вычислительной математики,
теории информации, методов измерений и математической статистики.
• Предметом представленного курса является изучение ИИС
промышленных роботов на основе знакомства с используемыми разделами
методов измерений и математической статистики, а также рассмотрение
устройства и функционирования блоков информационно – измерительных
систем промышленных роботов.
9. Основные понятия об информационно – измерительных системах.
Информационно – измерительная система ( И.И.С) – это совокупность
функционально объединенных измерительных, вычислительных и других
технических средств, предназначенных для сбора, передачи, хранения,
обработки и преобразования измерительной информации с целью ее
представления потребителю ( например в А.С.У.) в требуемом виде, либо для
автоматического выполнения логических функций измерения, контроля ,
диагностирования, идентификации (распознавания образов).
• Общее требование к ИИС состоит в том, чтобы исходная измерительная
информация, вводимая в систему, на первом этапе представлялась без
искажений и, как правило, в реальном масштабе времени.
На этапе обработки поступившая в систему информация преобразуется к
виду, удобному для ее использования.
• Для этого производится предварительная обработка данных: сжатие,
распаковка, распознавание. При этом применяются алгоритмы обработки,
используемые в конкретных информационно-измерительных комплексах
конечного пользователя
• Термины и определения.
• Система –множество взаимосвязанных элементов, каждый из которых
прямо или косвенно связан с любым элементом этой системы. При этом два
любых подмножества системы не могут быть независимыми без нарушения
целостности, единства системы.
10.
Информационным называется процесс, происходящий при установлении связимежду источником информации и ее потребителем. Он включает в себя :
обнаружение источника и вычисления, измерение и контроль, распознавание и
хранение, обобщение и отображение.
Комплекс технических средств И.И.С. – совокупность вычислительных и
управляющих устройств, средств преобразования, отображения и регистрации
сигналов, устройств передачи и обработки сигналов и данных, исполнительных
устройств, достаточных для выполнения всех заданных функций И.И.С. Для
этого необходимо чтобы И.И.С. имела техническое, информационное,
математическое, программное и организационное обеспечение.
Вход – часть И.И.С или входящего в нее устройства, звена, на которую
непосредственно подается воздействие извне, от исследуемого объекта
Выход – часть И.И.С или входящего в нее устройства, блока, звена, которая в
соответствии с используемым алгоритмом функционирования передает
информацию потребителю. Информация передается в виде сигнала, который
представляется математической функцией, описывающей изменение во времени
регистрируемого параметра объекта.
11.
• Все измеряемые объекты принято называть физическими величинами.• Мера – это средство измерений, предназначенное для воспроизведения и (или) хранения
физической величины одного или нескольких заданных размеров, значения которых выражены в
установленных единицах и известны с необходимой точностью.
• 1. Точность мер и измерительных приборов – свойство, характеризующее степень приближения
• а) для мер – их действительного значения к номинальному;
• б) для измерительных приборов - их показаний к истинным ( действительным ) значениям
измеряемой величины.
• Повышение точности мер и измерительных приборов создается уменьшением соответствующих
им погрешностей.
• В связи с этим точность характеризуется числом, обратным значению относительной погрешности.
• По точности меры и измерительные приборы разделяются на классы точности.
• 2. Помехоустойчивость – способность элементов и системы сохранять свои функции при
воздействии внешних и внутренних помех определенного уровня.
• 3. Под надежностью элементов и системы понимается их способность сохранять свои свойства на
рабочем уровне при определенных условиях эксплуатации.
• Основными понятиями надежности являются:
• а) безотказность – способность сохранять работоспособность в течение определенного интервала
времени в определенных ( заданных ) условиях эксплуатации;
• б) отказ – частичная или полная утрата или видоизменение основных свойств элементов и
системы, которые существенно снижают или приводят к полной потере их работоспособности.
• 4. Адаптивность – свойство, определяющее приспособление к выполнению основных функций
элементов и системы к изменяющимся условиям их эксплуатации. В промышленных роботах это
производится при помощи адаптивной системы управления.
12.
В любой И.И.С. с необходимыми функциональными возможностями технические и
вспомогательные характеристики, в основном, определяются объектом исследования, для которого
создана система.
Назначение И.И.С.
И.И.С можно определить как систему, предназначенную для целенаправленного оптимального
ведения измерительного процесса с целью обеспечения смежных систем высшего уровня
необходимой достоверной информацией. Это определяет основные функции И.И.С., которые
состоят в следующем:
1) Получение измерительной информации от объекта исследования.
2) Обработка, передача и представление этой информации оператору или Э.В.М.
3) Запоминание этой информации, отображение и формирование управляющих воздействий.
Качество выполнения этих функций характеризуется при помощи частных критериев,
определяющих измерительный процесс, таких как: точность, помехоустойчивость, надежность,
пропускная способность, сложность, экономичность и др.
И.И.С. должна оптимально управлять измерительным процессом или экспериментом, то есть
при экстремальном значении выбранного критерия она должна выполнять назначенные ей
функции с требуемыми значениями других критериев: точности, быстродействия, надежности,
экономичности, способам и форме представления информации, размещению измерительных
средств, обладать свойствами технической , информационной и метрологической совместимости и
др.
13. 3.Основные компоненты информационно – измерительных систем.
• Состав и структура конкретной ИИС определяется техническими требованиями,установленными ГОСТ ом и содержащимися в техническом задании на ее
изготовление.
• ИИС должна:
• обладать требуемыми характеристиками точности, надежности и
быстродействия;
• управлять измерительным процессом или проводимым экспериментом в
соответствии с принятым критерием ее функционирования;
• выполнять предписанные ей функции в соответствии с решаемой задачей;
• отвечать экономическим требованиям, предъявляемым к форме и способам
представления информации, быть совместимой с другими ИИС и др.
• Процесс функционирования информационно – измерительной системы
предполагает превращение входной информации в выходную. При этом
поступившая на вход информация подвергается обработке и преобразованию,
которые автоматически осуществляются в блоках системы.
• Основные компоненты и упрощенная схема их взаимодействия при работе
информационно – измерительной системы представлены на рисунке 1.
14.
Упрощенная схема взаимодействия основных компонент И.И.С.Организационное
обеспечение
Входная
информация
Техническое
обеспечение
Оперативный
персонал
Информационное
обеспечение
Математическое
обеспечение
Выходная
информация
Программное
обеспечение
МЕТРОЛОГИЧЕСКОЕ ОБЕСПЕЧЕНИЕ
Рис. 1. Основные компоненты информационно – измерительных систем.
15.
• Для того чтобы обработка и преобразования обеспечивали оптимальноефункционирование информационно – измерительной системы необходимо
обеспечить их деятельность в соответствии с заданными инструкциями и
правилами.
• Эту задачу выполняет организационное обеспечение И.И.С., представленное
совокупностью описаний функциональной, технической и организационной
структур, инструкций и регламентов, обеспечивающих требуемое
функционирование И.И.С
• Математическое обеспечение - это совокупность методов, моделей и
вычислительных алгоритмов, используемых для проведения вычислений,
моделирования и преобразований, связанных с изменением системы отсчета.
• Программное обеспечение - это совокупность программ, с помощью которых
реализуются вычислительные алгоритмы, осуществляется контроль за
функционированием системы измерений или проведением измерительного
эксперимента, за работой технических средств.
• Информационное обеспечение - это совокупность элементов системы
классификации и кодирования информации. Оно определяет способы и
конкретные формы информационного отображения состояния объекта
исследования в виде документов, диаграмм, графиков, сигналов для
представления их в систему управления ПР.
16.
• Техническое обеспечение – это комплекс технических средств,предназначенных для обеспечения работы информационно – измерительной
системы . Технические средства И.И.С. состоят из следующих блоков:
• 1) Множества первичных измерительных преобразователей (датчиков).
• 2) Множества вторичных измерительных преобразователей.
• 3) Блока цифровых устройств (процессоров и микропроцессоров).
• 4) Множества элементов описания – норм (эталонов).
• 5) Множества преобразователей сигналов, средств отображения, памяти и
др.
Всю информационно – измерительную систему охватывает
метрологическое обеспечение, которое представляется комплексом
технических средств и программного обеспечения установления и
применения научных основ, правил и норм, необходимых для получения
единства и требуемой точности измерений.
17. Математические модели информационно – измерительных систем.
Модель - это система, которая отображает и/или воспроизводит объект
исследования, и используется вместо его при изучении и представлении информации
об объекте. Создание каждой модели всегда имеет определенную цель. Методы
получения и исследования моделей определяются как моделирование. Основные
свойства модели: эффективность, универсальность, устойчивость, содержательность,
адекватность, полнота, динамичность.
• Свойство эффективности показывает, насколько правильным было создание и
использование модели для достижения поставленной цели.
• Под универсальностью модели понимается возможность её применения для
решения широкого круга задач.
• Устойчивость модели означает её правильную работу в изменяющихся внешних
условиях и экстренных ситуациях.
• Свойство содержательности определяет количество функции модели.
• Адекватность определяет соответствие модели поставленной задаче.
Модель отображает объект-оригинал не во всех его свойствах и функциях,
ограничивается описанием свойств, интересующих исследователя.
• Под полнотой модели понимается наличие сведений об объекте-оригинале,
необходимых для достижения поставленной цели.
• Динамичность определяет изменение модели с течением времени.
18.
• Математическая модель исследуемого объекта измерения в ИИСописывает процесс взаимодействия между переменными входа и выхода
для установившегося и переходного состояний , т. е. модели статики и
динамики, а также начальные и граничные условия и области изменения
переменных. Переменными, как правило, являются признаки,
характеризующие исследуемый объект, представляемые их значениями.
• Если переменные рассматриваются как функции только времени, то
соответствующие модели называются моделями с сосредоточенными
параметрами. Если же переменные, рассматриваются как функции
времени и пространственных координат, то соответствующие модели
называются моделями с распределенными параметрами.
Вид математической модели выбирается из условий проводимого
исследования.
Форма записи:
• аналитическое соотношение,
• таблицы экспериментальных данных,
• смешанное: экспериментально – аналитическое.
19.
• Аналитическое представление модели имеет вид:Системы алгебраических или трансцендентных уравнений,
Смстемы обыкновенных дифференциальных уравнений,
Системы уравнений в частных производных,
Системы переходных и передаточных функций,
Системы частотных и спектральных характеристик и др.
Наиболее часто в И.И.С. используется математическое
моделирование реализующее схему:
объект – модель – вычислительный алгоритм – программа для процессора –
расчет по программе – анализ полученных результатов – создание
управляющих воздействий.
Ядро вычислительного эксперимента: модель – алгоритм – программа
калибрует и формирует оптимальную модель объекта исследования.
• Алгоритм измерения может быть представлен словесно, аналитически,
графически или сочетанием этих методов.
• Последовательность действий не произвольна , а реализует выбранный
метод решения задачи.
20.
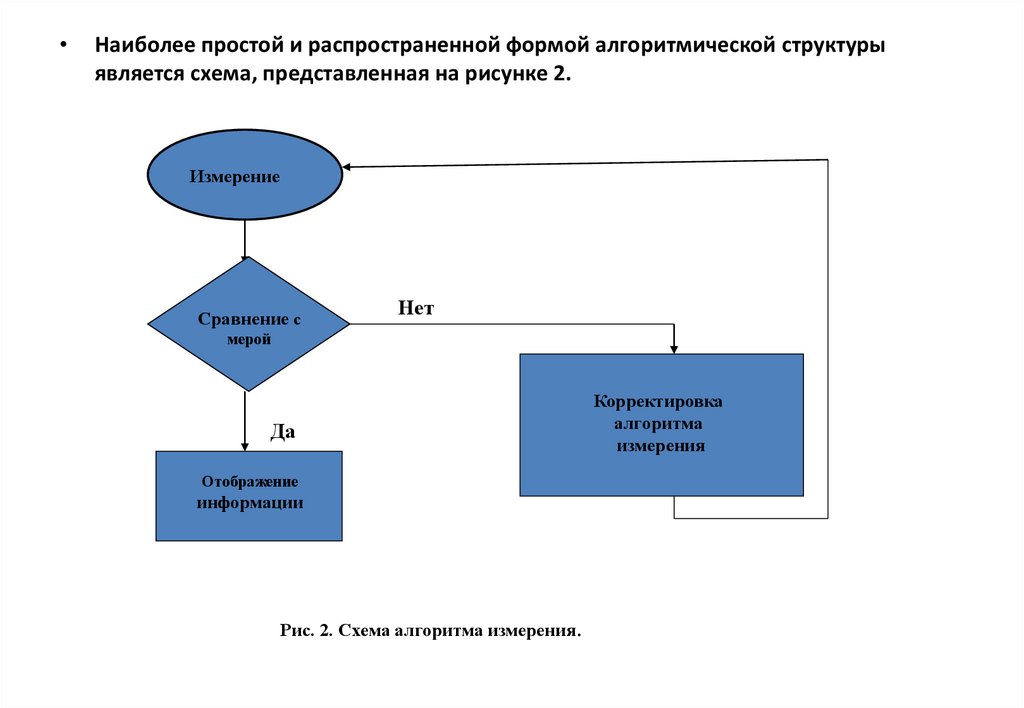
Наиболее простой и распространенной формой алгоритмической структуры
является схема, представленная на рисунке 2.
Измерение
Сравнение с
Нет
мерой
Да
Отображение
информации
Рис. 2. Схема алгоритма измерения.
Корректировка
алгоритма
измерения
21.
Обобщенная структура ИИС.• Это состав функциональных устройств ИИС, образующих информационный тракт системы,
осуществляющей функции сбора, предварительной обработки, представления, передачи и обработки
информации.
• На рис. 3. представлен вариант блок-схемы ИИС. На вход системы поступает аналоговый
сигнал S(t), сформированный информационным устройством (или датчиком), являющимся источником
данных. Сигнал S(t) рассматривается как реализация случайного процесса. Цепь преобразования данных
одного датчика в многоканальной системе образует измерительный канал.
Подготовка данных
Источник информации
Источник
данных
Датчики
Объект
исследования
Согласование
Усиление
Фильтрация
УВХ
Сжатие
данных
АЦП
Группировка
потоков
Кодирование
Передающее
устройство
Канал
связи
Компьютер
Восстановление
аналогового сигнала
Приемное
устройство
CPU
Фильтр
DRAM
ЦАП
Интерфейс
вывода
DSP
HD
Monitor
SVGA
Интерфейс
с компьютером
Декодирование
Рис.3. Блок – схема информационно измерительной системы с входным аналоговым сигналом .
22.
• В блоке подготовки сигнал подвергается предварительной аналоговой обработке –согласование, усиление (приведение амплитуды к динамическому диапазону устройства
выборки и хранения – УВХ), полосовая фильтрация (ограничение полосы частот
сигналов для корректной оцифровки).
•Поскольку подсистема обработки в ИИС является цифровой системой, то каждый
сигнал подвергается процедуре аналого-цифрового преобразования в модуле АЦП.
• Одна из задач подсистемы цифровой обработки, которая выполняется с
использованием ресурсов компьютера и специализированных процессоров цифровой
обработки – сортировка информации и отбраковка аномальных результатов
наблюдений.
• Отбраковка является частным случаем более общей задачи – фильтрации сигналов
от помех и/или использования методов распознавания образов.
•Другими задачами подсистемы обработки являются:
•· предварительная обработка данных (сглаживание, удаление тренда);
•· статистическая обработка сигналов (применяются различные алгоритмы в
зависимости от назначения ИИС);
•· спектральная обработка (разные методы в зависимости от назначения ИИС);
•· формирование моделей процессов и явлений;
•· представление результатов предварительной обработки или анализа;
•· хранение данных.
• Перечисленные задачи решаются в ИИС, которые являются
измерительными системы в “чистом виде” и выполняют операции:
мониторинг, диагностика, контроль, научные исследования
23.
•· Последовательность отсчетов от различных измерительных каналовобъединяется в общий поток для последующего ввода в компьютер или
передачи по каналу связи. В ряде случаев могут применяться устройства
сжатия данных (либо сжатие осуществляется после ввода данных в
компьютер – программные методы сжатия).
•Состав и последовательность расположения функциональных устройств в
различных ИИС может отличаться от приведенной в блок-схеме, но
характерным является наличие данных устройств как типовых в системах
различного назначения и технического воплощения
•Подсистема передачи включает кодер и декодер канала связи, передающее и
приемное устройства и собственно канал связи (среда с антенными
устройствами). Кодер и декодер осуществляют помехоустойчивое кодирование и
декодирование сигналов с целью дополнительной защиты передаваемых
сообщений от помех в канале связи и могут отсутствовать при наличии
качественного канала.
•Восстановление исходного аналогового сообщения по цифровым отсчетам с
допустимой погрешностью производится на приемной стороне. В современных
системах восстановление непрерывного сообщения, как правило, не
выполняется, поскольку регистрация, хранение и обработка информации
выполняются в цифровом виде, но принципиальная возможность
восстановления предусматривается.
24.
Классификация информационно - измерительных систем.В зависимости от функционального назначения ИИС подразделяются на следующие
классы:
- измерительные системы;
- статистические измерительные системы;
- системы автоматического контроля (САК);
- системы технической диагностики (СТД);
- системы распознавания образов;
-системы идентификации.
• Собственно измерительные системы используются для различного рода
комплексных исследований. Они предназначены для получения максимального
количества достоверной измерительной информации об объекте для составления
алгоритмического описания его поведения. При их помощи устанавливается
соответствие между значениями измеряемых физических величин и используемыми
мерами. Кроме этого они обеспечивают хранение информации о полученных
значениях исследуемых параметров объекта.
Обратная связь такой системы с исследуемым объектом отсутствует или носит
вспомогательный характер.
• Информация, полученная на выходе ИИС, может использоваться для принятия
каких-либо решений, создания возмущающих воздействий, но не для управления
объектом. Использование информации не входит в функции ИИС. Эта информация
предоставляется человеку-оператору или поступает в средства автоматической
обработки информации.
•Упрощенная классификация измерительных систем представлена на рисунке 4
25.
Классификация измерительных систем.Измерительные системы
Неэлектрические
По физической природе
параметра
Напряжения
Тока
Электрические
Мощности
По параметру цепей
Прямые
Косвенные
По методам получения результатов
Совместные
Совокупные
Параллельные
По методам сбора и обработки
информации
Последовательные
(сканирование)
Параллельно последовательные
Мультиплицированные
Рис.4. Упрощенная классификация измерительных систем.
26.
Поскольку измерение производится приборами при изменяющихся значениях внешних
условий (температуры среды, напряженности электрического и магнитного поля и др.), то
регистрируемые результаты измерений зависят от величины изменений характеристик объекта и
средств измерений, вызванных влиянием этих условий. Поэтому регистрируемые значения одной
и той же физической величины являются случайными величинами, непредсказуемо
изменяющимися во времени. Эти значения не совпадают с истинным значением, рассматриваются
как оценки измеряемой величины..
Одной из задач, возникающих при обработке результатов измерений, является определение
оценки наиболее близкой истинному значению и погрешностей измерений, которые определяют
степень риска при использовании полученных результатов.
Если результат измерения - случайная величина ξ , то погрешностью измерения неизвестной
измеряемой физической величины а будет разность ξ – а. Эта величина формируется из трех
основных типов погрешностей: систематических, случайных и грубых и в общем случае зависит
от применяемого метода измерений. Поскольку, в соответствии с постулатами метрологии
истинное значение не может быть определено измерениями, то обработка результатов измерений
производится в соответствии основными положениями математической статистики
Существующие методы измерений построены в соответствии с особенностями измеряемых
величин и определяются как прямые, косвенные, совокупные и совместные.
Прямое измерение – это измерение, при котором искомое значение физической величины
определяется непосредственно из опыта сравнением измеряемой физической величины с мерой
(эталоном). Примеры: а) измерение длины детали микрометром; б) измерение силы тока
амперметром.
•Так как погрешность измерений исследуемой величины существенно зависит от количества
проведенных измерений, то прямые измерения применяются как на однократные и/или
многократные.
27.
•Основные понятия о методах измерений.•Прямые однократные измерения.
Погрешность прямого однократного измерения формируется под влиянием различных факторов.
• Существенный вклад, в этом случае, составляет погрешность используемого средства измерения
(систематическая погрешность), которая в отличие от остальных составляющих может быть заранее
определена. Поэтому в качестве первого приближения погрешность ∆α измерения физической
величины а принимается равной части основной погрешности, используемого средства измерения в
соответствующей области шкалы.
• Поскольку при однократном измерении случайная составляющая не может быть определена, то
существует неопределенность в получаемом результате ξ ± ∆α .
•Прямые многократные измерения.
Оценить действительное значение измеряемой физической величины с достаточной точностью и
определенностью можно проведением многократных измерений с последующей обработкой
полученных результатов.
• Очевидно, что наиболее точные точечные и интервальные оценки действительного значения
можно получить только при правильной обработке полученных результатов измерений. В этом
случае, при обработке результатов наблюдений необходимо последовательно совершить необходимые
операции.
Результат обработки многократных прямых измерений физической величины а, при заданной
доверительной вероятности, представляется двумя числами:
• а) средним значением измерений физической величины ā: б) погрешностью ее измерения, равной
половине доверительного интервала ∆а .
ā ± ∆а .
28.
• Косвенные измерения – это определение значений физической величины, которая не может бытьпредставлена прямыми измерениями, но может быть вычислена по результатам измерений
других физических величин, связанных с исследуемой известной функциональной зависимостью.
•Например, определение ускорения силы тяжести (УСТ) производится через период собственного
2
2
колебания маятника. Используется формула: g l , T из которой
T l g
• Очевидно, что значение и погрешность значения УСТ определяются измеренными значениями
длины подвеса и периода колебаний.
Результат измерения величины U, которая определяется линейной функцией с величинами
a1,a2, a3 посредством соотношения:
U = f (a1,a2,a3) = K1a1+K2 a2+K3a3
•в котором Ki (i=1,2,3)- постоянные коэффициенты, представится следующим образом .
•Прямыми измерениями определяются оценки величин ai – их средние арифметические āi
•Если все ai являются случайными величинами с нормальным распределением, то среднее
арифметическое значение исследуемой величины
•Ū = K1ā1 +K2 ā2 + K3ā3
•В этом случае погрешность оценки физической величины U будет зависеть не только от
погрешностей результатов измерений величин ai , но и от вида используемой функциональной
зависимости (*). (Как измерить плотность воды?)
•Совокупные измерения. Проводимые одновременно измерения нескольких одноименных величин,
при которых искомые значения величин определяют путем решения системы уравнений,
получаемых при измерениях этих величин в различных сочетаниях...
• Совместные измерения. Проводимые одновременно измерения ( прямые или косвенные) двух
или нескольких не одноименных величин для определения зависимости между ними. Они
проводятся для построения функциональной зависимости между исследуемыми физическими
величинами. Такие измерения широко используются в регрессионном анализе.
29.
Методы сбора и обработки информации, в основном, определяются характеристиками
технических средств измерительной системы.
• Характеристики технических средств представляются данными элементной базы ИС,
включающей типы и серии микросхем и других элементов, типы блоков , устройств и
дополнительного оборудования, включая источники питания и условия эксплуатации системы.
В практической деятельности ИИС используются тогда, когда для управления рабочим
процессом и контроля за его выполнением необходимо регистрировать большое количество
параметров. Поэтому они, как правило, являются многоканальными. На вход таких систем
поступает множество физических величин, изменяющихся во времени или распределенных в
пространстве. На выходе представляются значения измеряемых величин в соответствующие
моменты времени и координат. Они могут выполнять прямые, косвенные , совокупные и
совместные измерения. .
Основными элементами таких ИС являются: датчики (Д) – первичные преобразователи,
воспринимающие информацию; меры (М), служащие для сравнения (С) значения измеряемой
величины с эталоном и средства регистрации результатов (В).
• В зависимости от числа и характера соединений этих элементов они бывают многоканальные с
параллельной структурой, сканирующие с последовательной структурой, мультиплицированные с
общей мерой и многоточечные с параллельно – последовательной структурой .
• Качество таких систем определяется организационным обеспечением, которым устанавливается
порядок очередности подключения каналов к средствам обработки и преобразования информации,
формируемый на основании установленных приоритето
•Эти системы приведены в схеме классификации измерительных систем.
30.
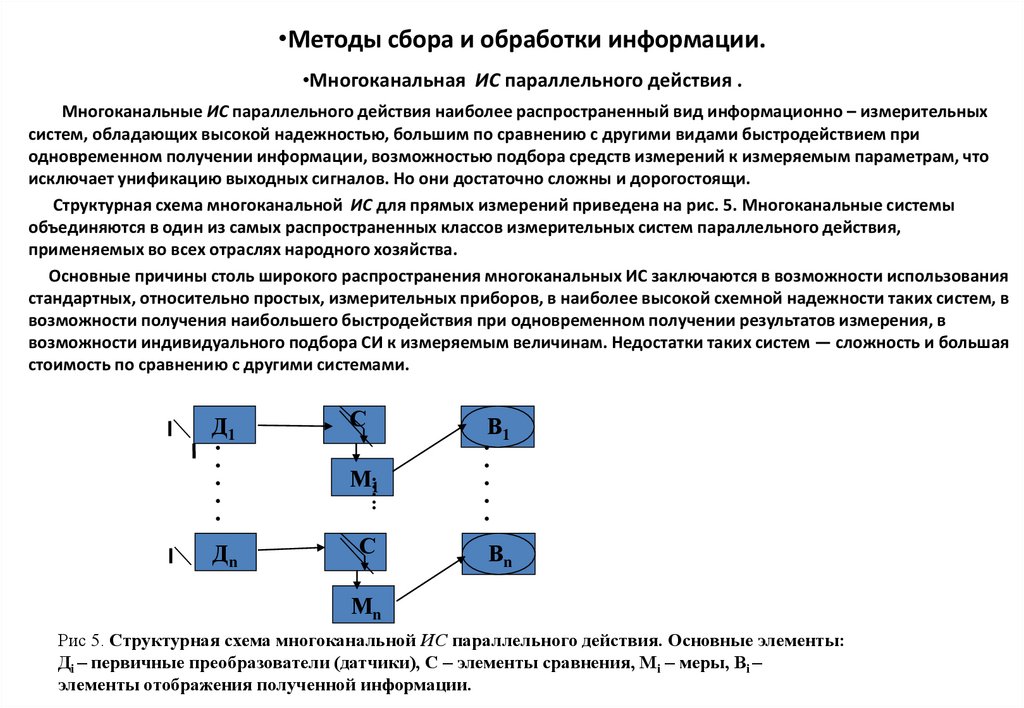
•Методы сбора и обработки информации.•Многоканальная ИС параллельного действия .
Многоканальные ИС параллельного действия наиболее распространенный вид информационно – измерительных
систем, обладающих высокой надежностью, большим по сравнению с другими видами быстродействием при
одновременном получении информации, возможностью подбора средств измерений к измеряемым параметрам, что
исключает унификацию выходных сигналов. Но они достаточно сложны и дорогостоящи.
Структурная схема многоканальной ИС для прямых измерений приведена на рис. 5. Многоканальные системы
объединяются в один из самых распространенных классов измерительных систем параллельного действия,
применяемых во всех отраслях народного хозяйства.
Основные причины столь широкого распространения многоканальных ИС заключаются в возможности использования
стандартных, относительно простых, измерительных приборов, в наиболее высокой схемной надежности таких систем, в
возможности получения наибольшего быстродействия при одновременном получении результатов измерения, в
возможности индивидуального подбора СИ к измеряемым величинам. Недостатки таких систем — сложность и большая
стоимость по сравнению с другими системами.
Д1
С
. . . . .
М1
…..
. . . . .
Дn
С
Вn
В1
Мn
Рис 5. Структурная схема многоканальной ИС параллельного действия. Основные элементы:
Дi – первичные преобразователи (датчики), С – элементы сравнения, Мi – меры, Вi –
элементы отображения полученной информации.
31. Последовательные ( сканирующие) ИС.
Последовательные (сканирующие) ИС с помощью одного канала выполняют измерения множества
различных физических величин.
Они содержат сканирующее устройство (СкУ), при помощи которого датчик перемещается в
пространстве, последовательно выполняя измерения параметров объекта. При этом для получения
результатов используется один канал.
При пассивном сканировании траектория движения может быть запрограммирована, при активном
– может изменяться в зависимости от получаемой измерительной информации.
Такие ИС применяются для измерения температурных полей, нахождения экстремальных значений
исследуемых полей (давлений, напряжений и т.п.) или одинаковых значений регистрируемого
параметра.
Структурная схема сканирующей ИС приведена на рисунке 6
Д
СкУ
С
М
Рис 6. Структурная схема сканирующей ИС.
В
32. Многоточечные ИС последовательно - параллельного действия.
Выполнение условий минимальной сложности ИС приводит к необходимости последовательного
многократного использования отдельных устройств измерительного тракта, а следовательно, к
применению ИС параллельно- последовательного действия, которые носят название многоточечных ИС.
Работа таких ИС основана на принципе квантования измеряемых непрерывных величин по времени.
Они применяются в сложных объектах с большим числом (до нескольких тысяч) измеряемых
параметров. Для координации действий параллельно и последовательно работающих блоков ИС, в них
применяются измерительные коммутаторы для коммутации сигналов от датчиков, обладающие
заданными метрологическими характеристиками. Они бывают контактными и бесконтактными. Первые
имеют достаточно высокую точность, но малое быстродействие, вторые уступают им по точности, но
превосходят по всем другим показателям.
• В таких системах используется а) либо множество датчиков, задействованных на один измерительный
тракт, и измерительный коммутатор SW, б) либо множество датчиков и множество индикаторов.
Соответствующие структурные схемы представлены на рисунках 7а) и 7б).
• Недостатки этих ИС определяются, в основном, характеристиками коммутаторов.
В
Дn
М
а)
SW
SW
Дn
М
б)
Рис.7. Структурная схема многоточечной ИС последовательно - параллельного действия.
а) – с одним коммутатором, б) - с двумя коммутаторами.
В1
…
…
SW
Д1
…
Д1
Вn
33.
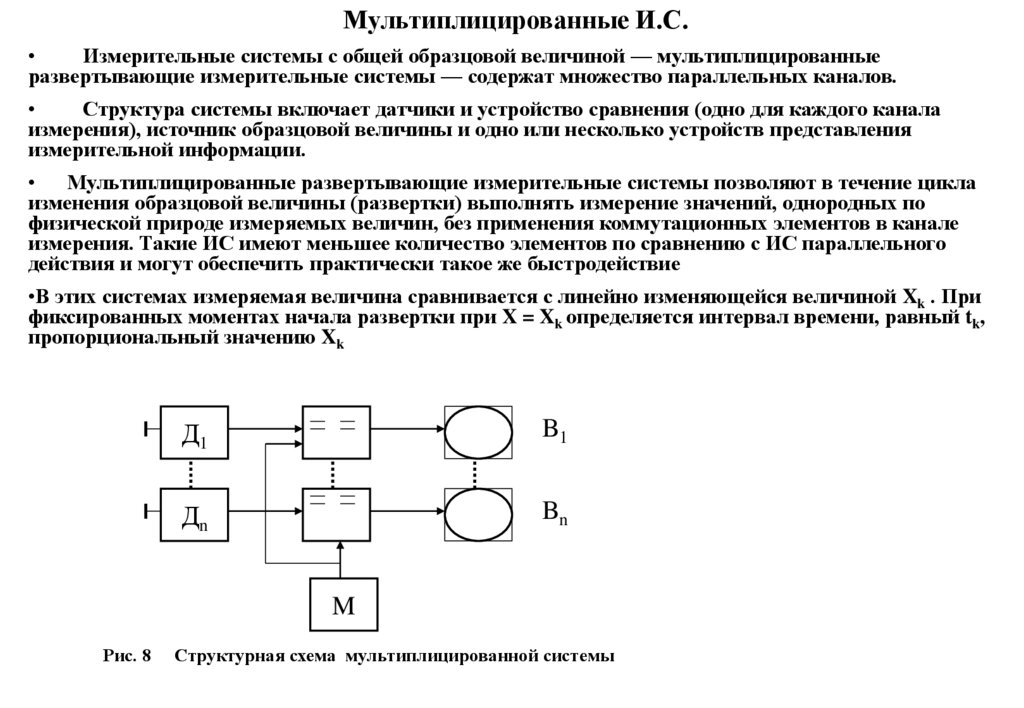
Мультиплицированные И.С.Измерительные системы с общей образцовой величиной — мультиплицированные
развертывающие измерительные системы — содержат множество параллельных каналов.
Структура системы включает датчики и устройство сравнения (одно для каждого канала
измерения), источник образцовой величины и одно или несколько устройств представления
измерительной информации.
Мультиплицированные развертывающие измерительные системы позволяют в течение цикла
изменения образцовой величины (развертки) выполнять измерение значений, однородных по
физической природе измеряемых величин, без применения коммутационных элементов в канале
измерения. Такие ИС имеют меньшее количество элементов по сравнению с ИС параллельного
действия и могут обеспечить практически такое же быстродействие
•В этих системах измеряемая величина сравнивается с линейно изменяющейся величиной Xk . При
фиксированных моментах начала развертки при X = Xk определяется интервал времени, равный tk,
пропорциональный значению Xk
Д1
B1
Дn
Bn
M
Рис. 8
Структурная схема мультиплицированной системы
34.
Статистические измерительные системы. При статистическом анализе случайных
величин и процессов используются соответствующие законы распределения вероятностей,
моментные (математическое ожидание, дисперсия и др), и корреляционные спектральные
функции. Для их определения используются анализаторы вероятностей, которые могут быть однои многоканальными.
• Одноканальные анализаторы вероятностей за цикл анализа реализации функции x(t)
позволяют получить одно дискретное значение этой функции или плотности распределения
исследуемого случайного процесса.
• Многоканальные анализаторы позволяют получать законы распределения амплитуд импульсов
и интервалов времени между ними, амплитуд непрерывных временных и распределенных в
пространстве случайных процессов и др.
• Существует два основных метода построения корреляционных измерительных систем. Первый
из них связан с измерением коэффициентов корреляции и последующим восстановлением всей
корреляционной функции, второй - с измерением коэффициентов многочленов,
аппроксимирующих корреляционную функцию. По каждому из этих методов система может
действовать последовательно, параллельно, работать с аналоговыми или кодоимпульсными
сигналами и в реальном времени.
Значительный класс статистических ИС – это корреляционные экстремальные ИС.
Корреляционные экстремальные ИС широко применяются для выделения сигналов на фоне
шумов, измерения параметров движения, распознаваня образов, идентификации, технической и
медицинской диагностики.
Системы спектрального анализа предназначены для количественной оценки спектральных
характеристик измеряемых величин. Существующие методы спектрального анализа
основываются на применении частотных фильтров или на использовании ортогональных
преобразований случайного процесса и преобразований Фурье над известной корреляционной
функцией.
35.
• Примечания. Случайный иди стохастический процесс – это процессизмененения во времени состояния системы в соответствии с присущими ей
закономерностями. Характеристики случайного процесса в любой момент
времени являются случайными величинами с соответствующим
распределением вероятностей. СП математически представляется как
однопараметрическое семейство случайных величин X (t ) , где t, как
правило, время.
• Корреляционная функция – характеристика случайного процесса,
определяемая соотношением
.
B(t , s) M [ X (t ) M { X (t )}][ X ( s) M { X ( s)}]
• Коэффициент корреляции – числовая характеристика совместного
распределения двух случайных величин, характеризующая их взаимосвязь.
Момент второго порядка совместного распределения этих величин
36.
Системы автоматического контроля (САК). Системы автоматического контроля
предназначены для контроля технологических процессов, характер поведения и параметры которых
известны. Объект контроля рассматривается как детерминированный.
• САК осуществляют контроль соответствия между текущим (измеренным) состоянием объекта и
установленной "нормой поведения," используя известную математическую модель объекта. По
результатам обработки полученной информации выдается суждение о состоянии объектов контроля.
Основной задачей САК является отнесение объекта к одному из возможных качественных состояний.
• В САК измерения производятся в относительных величинах (в процентах "нормального" значения).
При этом эффективность работы повышается. Оператор САК при таком способе количественной
оценки получает информацию в единицах, непосредственно характеризующих уровень опасности в
поведении контролируемого объекта (процесса).
•Как правило, САК имеют обратную связь, используемую для воздействия на объект контроля. В них
внешняя память имеет значительно меньший объем, чем объем памяти ИС, так как обработка и
представление информации ведутся в реальном ритме контроля объекта.
• Объем априорной информации об объекте контроля достаточен для составления алгоритма
контроля и функционирования самой САК, предусматривающего выполнение операций по обработке
информации. Алгоритм функционирования САК определяется параметрами объекта контроля.
Например, существуют параметры, кратковременное отклонение которых от "нормального" значения
может повлечь за собой возникновение аварийной ситуации; кратковременное отклонение других существенно не влияет на нормальный ход процесса; третья группа параметров используется для
расчета технико-экономических показателей (расход сырья, выход продукта и т. д.).
• По сравнению с ИС эксплуатационные параметры САК более высокие: длительность непрерывной
работы, устойчивость и воздействие промышленных помех, климатические и механические
воздействия..
•Системы автоматического контроля могут быть встроенными в объект контроля, или внешними по
отношению к нему.
37.
• Системы технической диагностики (СТД). Они относятся к классу ИИС, поскольку в нихпредполагается выполнение измерительных преобразований, совокупность которых составляет базу для
логической процедуры диагноза. Цель диагностики - определение класса состояний, к которому принадлежит
обследуемый объект..
• Диагностика рассматривается как совокупность множества возможных состояний объекта, множества
сигналов, несущих информацию о состоянии объекта, и алгоритмы их сопоставления. Объектами технической
диагностики являются технические системы, которые могут находиться в двух состояниях: работоспособном и/или
неработоспособном. Задачей систем технической диагностики СТД является определение работоспособности
элемента и локализация неисправностей..
• Основные этапы реализации СТД:
выделение состояний элементов объекта диагностики, сбор необходимых данных, оценка затрат труда на
проверку; . построение математической модели объекта и разработка программы проверки объекта; . построение
структуры диагностической системы.
• Элементы объекта диагноза, как правило, недоступны для непосредственного наблюдения. Поэтому процедуры
диагноза проводится без разрушения объекта, и в СТД применяются косвенные методы измерения и контроля.
• При поиске применяется комбинационный или последовательный метод.
При комбинационном поиске выполняется заданное число проверок независимо от порядка их осуществления.
Последовательный поиск связан с анализом результатов каждой проверки и принятием решения на проведение
последующей проверки.
• Системы технической диагностики подразделяют на специализированные и универсальные.
• По целевому назначению различают диагностические и прогнозирующие СТД.
Диагностические системы предназначены для установления точного диагноза, т. е. обнаружения и локализации
места неисправности.
Прогнозирующие СТД по результатам проверки в предыдущие моменты времени предсказывают поведение
объекта в будущем.
• По характеру диагностики или прогнозирования различают статистические и детерминированные СТД. При
статистической оценке объекта решение выносится на основании ряда измерений или проверок сигналов,
характеризующих объект. В детерминированной СТД параметры измерения реального объекта сравниваются с
параметрами образцовой системы (в СТД должны храниться образцовые параметры проверяемых узлов).
Конструктивно СТД подразделяют на автономные и встроенные (или внешние и внутренние).
38. Характеристики измерительных систем (ИС).
Характеристики измерительных систем (ИС).
Важнейшими характеристиками ИС являются эффективность, полнота выполняемых функций,
достоверность, надежность, быстродействие, характеристики входов и выходов, метрологические
характеристики.
Эффективность. Это параметр, характеризующий улучшение работы объекта при использовании
системы ИС.
В частности, экономический эффект объекта за определенный промежуток времени можно
представить соотношением:
• Э = Э2 – Э1,
где Э1 экономический эффект объекта за этот промежуток времени при работе без ИС;
Э2 – то же самое при работе с применением ИС;
Для сравнения различных ИС используется коэффициент эффективности
Э2 Э1
,
Эп Э1
где Э - экономический эффект объекта при использовании идеальной ИС, выполняющей идеально
п
все операции и при отсутствии при этом затрат.
0 1
Очевидно, что
Полнота (глубина) выполняемых функций определяет какая часть контролируемого или
управляемого объекта охвачена ИС. Коэффициент, характеризующий полноту
Р
Nk
N
где N – общее число параметров объекта: Nk - число параметров объекта, охваченных ИС.
39.
Достоверность. Это обобщенная характеристика. Требования, предъявляемые кэтому показателю, являются исходными для обоснования требований к частным
характеристикам ИС. Наиболее существенными признаками достоверности являются:
точность измерений контролируемых параметров, глубина контроля, надежность и
помехоустойчивость работы всех устройств.
• С уменьшением достоверности возрастает вероятность неработоспособного состояния
объекта контроля, измерения, управления при информации в системе в пределах
допусков. Пример низкой достоверности – работа системы с низкой помехоустойчивостью
в услоиях сильных помех. Аналогично – работа при недопустимо малой точности
измерений.
• Быстродействие. Оно характеризуется средним временем выполнения операций:
измерения, контроля, диагностики, поиска и т. п. Для циклических систем оно
характеризуется временем цикла.
Надежность. Критерий надежности и его числовые характеристики выбираются с
учетом особенностей применения ИС и характера решаемых задач. Для стационарных
ИС в качестве основных критериев надежности используются: время средней наработки
до отказа t0 и среднее время восстановления tв.
Характеристики входов и выходов системы представляют перечень и данные входов
и характеристики устройств отображения информации, то есть данные диспетчерского
пульта, дисплеев и других используемых средств отображения информации.
40.
Системы распознавания образов.
• Автоматизированная система управления роботом состоит из двух основных частей:
объекта управления и управляющей системы. В ней управляющая система осуществляет функции:
• идентификация состояния объекта управления;
• выработка управляющего воздействия исходя из целей управления с учетом состояния объекта
управления и среды;
• оказание управляющего воздействия на объект управления.
• Распознавание образов есть не что иное, как идентификация состояния некоторого объекта.
Следовательно, применение системы распознавания образов на этапе идентификации состояния
объекта управления представляется вполне очевидной. Однако в этом не всегда может быть
необходимость.
• Если объект управления динамичен и если нет однозначной связи между входными и
выходными параметрами объекта управления (т.е. между входными параметрами и состоянием
объекта), то есть эта связь имеет выраженный вероятностный характер, то в этом случае
необходимо применять более развитые и адекватные реальной ситуации методы измерений:
а) классификация или распознавание образов (обучение на основе обучающей выборки,
адаптивность алгоритмов распознавания, адаптивность наборов классов и исследуемых
параметров, выделение наиболее существенных параметров и снижение размерности описания
при сохранении заданной избыточности и т.д.);
б) статистические измерения, когда результатом измерения некоторого параметра является не
отдельное число, а вероятностное распределение: изменение статистической переменной означает
не изменение ее значения самого по себе, а изменение характеристик вероятностного
распределения ее значений.
41.
Теория распознавания образов это раздел информатики определяющий теоретические основы
и методы классификации и идентификации объектов, сигналов, ситуаций, явлений или
процессов, которые характеризуются набором некоторых свойств и признаков.
Распознавание – это способность живых существ при помощи своих органов чувств обнаруживать
и определять внешние объекты и явления. Мы определяем знакомого человека увидев его или
по его голосу, собаки определяют наркотик или другие объекты по запаху. В этом случае
распознавание определяется по воспринимаемой звуковой (акустической), зрительной
(оптической) информации.
Воспринимая внешний мир, мы всегда производим классификацию воспринимаемых
ощущений, которые образуют множество признаков окружающих объектов, т. е. разбиваем их на
группы похожих, но не тождественных явлений. Например, улицу образуют строения, которые
все являются домами, поскольку имеют некоторое количество одинаковых признаков. Это
позволяет при распознавании объектов использовать их классификацию, отнесение объекта к
определенному классу при наличии у него вполне определенных признаков.
Развитие техники, создание таких отраслей как робототехника, потребовало разработки
устройств, обладающих способностью распознавания объектов в общем потоке изделий
производства. Возникло направление создания теории и методов построения систем
распознавания , предназначенных для решения прикладных производственных задач.
Распознавание образов (объектов, сигналов, ситуаций, явлений или процессов) – это решение
задачи идентификации объекта или определения каких-либо его свойств по его изображению
(оптическое распознавание) или аудиозаписи (акустическое распознавание) и другим
характеристикам при помощи технических средств.
42.
Распознавание представляет собой информационный процесс, реализуемый некоторымпреобразователем информации (системой распознавания), имеющим вход и выход. На
вход системы подается информация о том, какими признаками обладают предъявляемые
объекты. На выходе системы отображается информация о том, к каким классам
(обобщенным образам) отнесены распознаваемые объекты.
Основные понятия, используемые при этом: множество и образ.
• Распознавание образов определяется как процесс отнесения исследуемых ситуаций,
явлений и образов на основе анализа их характеристик (параметров), к одному из
классов, на которые они предварительно разделены. При этом возникают
взаимосвязанные задачи выбора параметров распознавания и задачи определения и
оценки качества решающей функции.
• Для решения первой задачи определяется совокупность параметров ,
характеризующих исследуемый объект (например, длина, кривизна, число отверстий и т.
д.). Решение второй связано с отысканием соответствующего классификатора.
• Следует заметить, что решения этих задач различны для разных объектов, поскольку
признаки объектов в этом случая отличаются значимо и не могут бать представлены
одинаково.
• Ниже приведен список областей применения распознавания образов:
• - Распознавание символов, - Распознавание отпечатков пальцев.
•- Техническое зрение робототехнических систем, - Распознавание речи,
• Биомедицинские приложения: обработка томограмм, рентгенограмм, диагностика
заболеваний и т. д,
• - Мониторинг технических систем, и др.
43.
В компьютере множество представляется набором неповторяющихся однотипных
элементов.
Образ, класс — классификационная группировка в системе классификации, объединяющая
(выделяющая) определенную группу объектов по некоторому признаку.
Образы обладают характерным свойством, проявляющимся в том, что ознакомление с
конечным числом признаков из одного и того же множества дает возможность узнавать сколь
угодно большое число его представителей. Примерами образов могут быть: река, море, мерседес.
Образы обладают характерными объективными свойствами в том смысле, что разные люди,
обучающиеся на различном материале наблюдений, большей частью одинаково и независимо
друг от друга классифицируют одни и те же объекты.
В классической постановке задачи распознавания универсальное множество
разбивается на части - образы. Каждое отображение какого-либо объекта на
воспринимающие органы распознающей системы, независимо от его положения
относительно этих органов, принято называть изображением объекта, а множества
таких изображений, объединенные какими-либо общими свойствами, представляют
собой образы. Методика отнесения элемента к какому-либо образу называется
решающим правилом.
Результаты измерения, используемые для классификации образов, называются признаками.
Признак – это некоторое количественное измерение объекта произвольной природы.
Совокупность признаков, относящихся к одному образу, называется вектором признаков.
Векторы признаков принимают значения в пространстве признаков.
В рамках задачи распознавания считается, что каждому образу ставится в соответствие
единственное значение вектора признаков и наоборот: каждому значению вектора признаков
соответствует единственный образ.
44.
• Система распознавания имеет типичную функциональную схему .Данные подлежащие распознаванию поступают на вход системы, где подвергаются
предобработке для преобразования их к виду необходимому для следующего этапа или
•для выделения их основных признаков т. е. решается задача создания описания
объектов распознавания , пригодного для обработки их принятым алгоритмом.
• На этапе принятия решений преобразованные данные обрабатываются в
соответствии с принятым алгоритмом. Получаемые результаты являются выходными
данными. Их характер определяется предметом исследования. Например, если это
симптомы обследования больного, то выходной сигнал – это диагноз, т. е. название
болезни; если это геометрические характеристики, то это исследуемая деталь и т. д.
• Кроме этого, в системе распознавания предусматривается этап обучения системы,
формирующий в ее памяти сведения , необходимые для распознавания заданного класса
входных данных.
• Этап принятия решений определяет характер и назначение системы. На нем
решается два класса задач, определяющих назначение системы.
• Распознавание – определение классов исследуемых объектов с помощью применения
известных правил классификации. Для выполнения этой задачи предполагается
обучение системы распознавания на множестве примеров – на обучающей выборке, т. е.
проводится операция обучения с учителем.
• Классификация – разбиение множества объектов на непересекаюшиеся классы.
45.
Задача распознавания.Рассматривается задача классификации объектов. Задано множество M объектов.
Каждый объект
определяется совокупностью значений признаков, описываемых
соотношением:
I ( ) {x1 ( ), x 2 ( ),..., xn ( )}
Значения признаков xi (i 1, 2,...n) . Их наборы одинаковы для всех объектов признаков.
Для определения отличия объектов друг от друга применяется критерий K I ( )
с помощью которого производится разделение множества на классы. Одним из методов
распознавания объектов является их представление в виде точек в пространстве,
называемом Евклидовым.
Распознавание производится посредством анализа и обработки этого пространства
точек. Точки этого пространства, соответствующие близким по параметрам векторам
находятся близко друг от друга и рассматриваются как относящиеся к одному классу. В
пространстве выделяются области, соответствующие определенным классам.
Правило отнесения образа к одному из классов на основании его вектора признаков
называется классификатором или решающим правилом, а соответствующее
математическое обеспечение решающей функцией.
В качестве классификаторов для различных распознаваемых объектов используются
различные функции, из которых основными являются:
Решающие функции. Функции расстояния. Функции правдоподобия.
Для робототехнических систем широко применяются решающие функции.
Построение классификатора в этом случае сводится к поиску функций, разделяющих
векторное пространство на области соответствующих классов.
46.
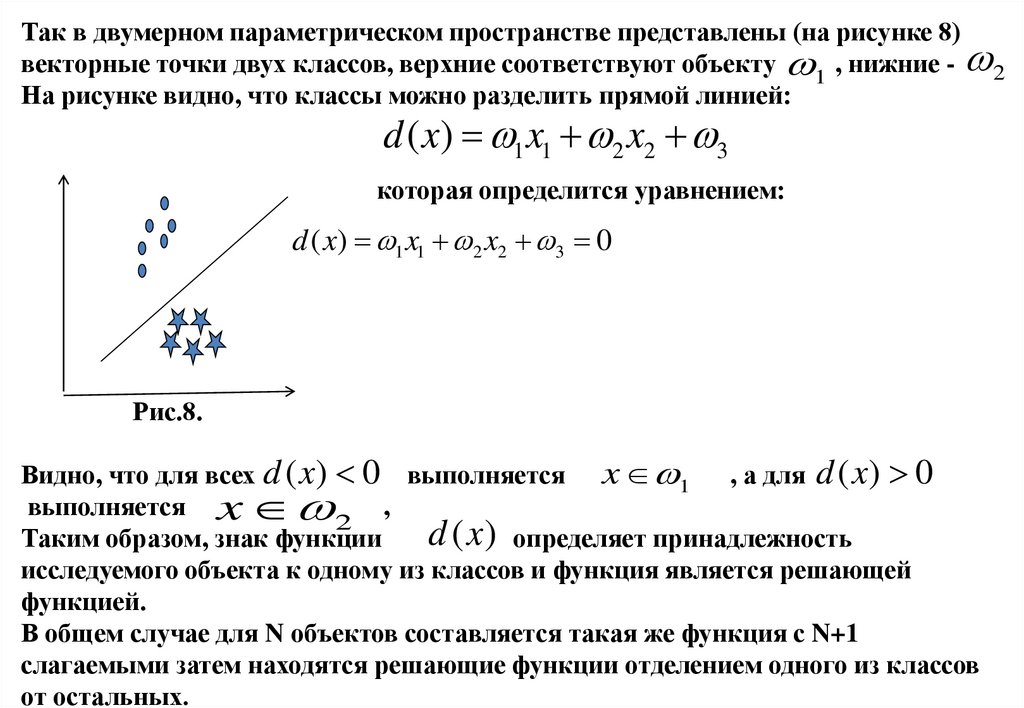
Так в двумерном параметрическом пространстве представлены (на рисунке 8)векторные точки двух классов, верхние соответствуют объекту 1 , нижние - 2
На рисунке видно, что классы можно разделить прямой линией:
d ( x) 1 x1 2 x2 3
которая определится уравнением:
d ( x) 1 x1 2 x2 3 0
Рис.8.
Видно, что для всех d ( x) 0 выполняется x 1
, а для d ( x) 0
выполняется x
,
2
d ( x ) определяет принадлежность
Таким образом, знак функции
исследуемого объекта к одному из классов и функция является решающей
функцией.
В общем случае для N объектов составляется такая же функция с N+1
слагаемыми затем находятся решающие функции отделением одного из классов
от остальных.
47.
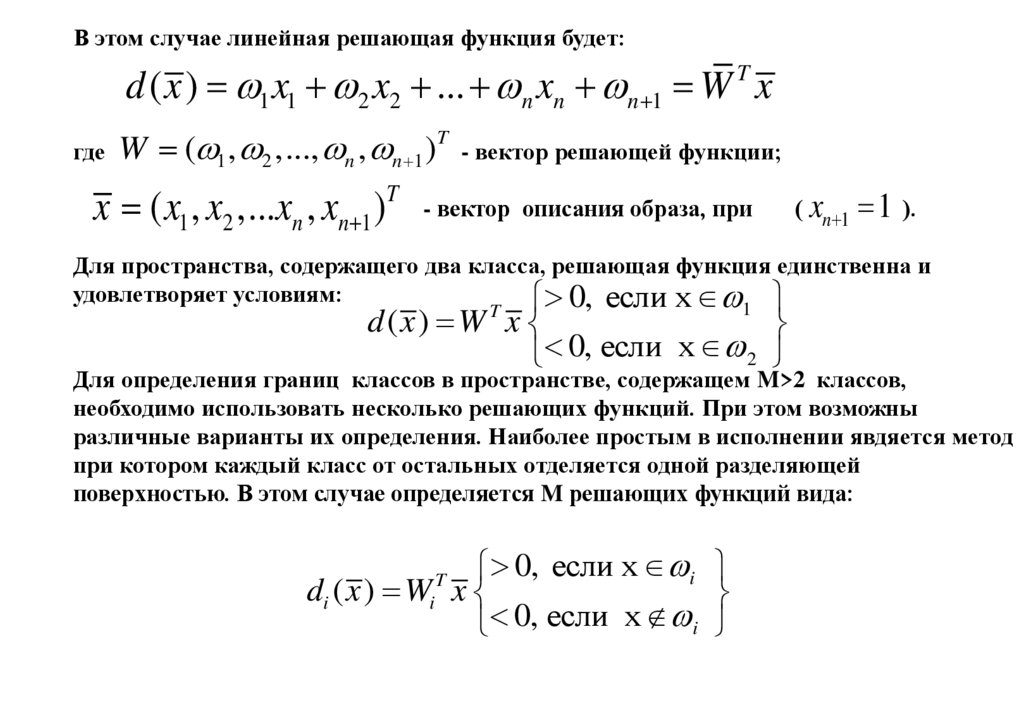
В этом случае линейная решающая функция будет:d ( x ) 1 x1 2 x2 ... n xn n 1 W T x
где W ( 1 , 2 ,..., n , n 1 )
x ( x1 , x2 ,...xn , xn 1 )
T
T
- вектор решающей функции;
- вектор описания образа, при
( xn 1 1 ).
Для пространства, содержащего два класса, решающая функция единственна и
удовлетворяет условиям:
0, если x
1
d (x ) W T x
0,
если
x
2
Для определения границ классов в пространстве, содержащем M>2 классов,
необходимо использовать несколько решающих функций. При этом возможны
различные варианты их определения. Наиболее простым в исполнении явдяется метод
при котором каждый класс от остальных отделяется одной разделяющей
поверхностью. В этом случае определяется M решающих функций вида:
0, если x i
di ( x ) Wi x
0,
если
x
i
T
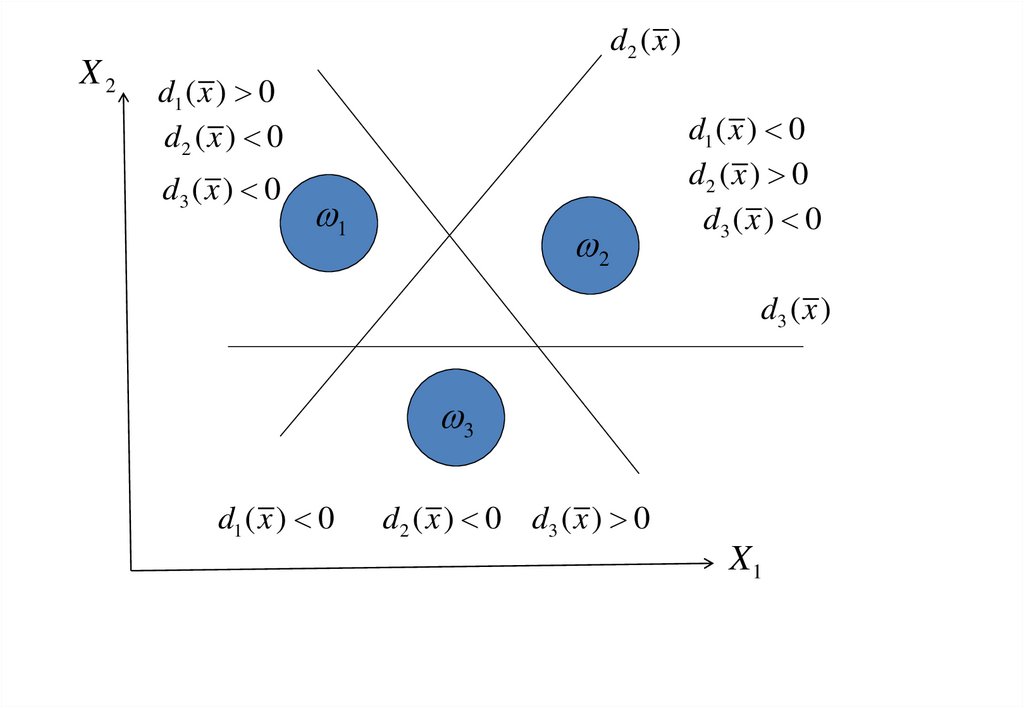
48.
X2d2 ( x )
d1 ( x ) 0
d2 ( x ) 0
d3 ( x ) 0
1
2
d1 ( x ) 0
d2 ( x ) 0
d3 ( x ) 0
d3 ( x )
3
d1 ( x ) 0
d 2 ( x ) 0 d3 ( x ) 0
X1
49.
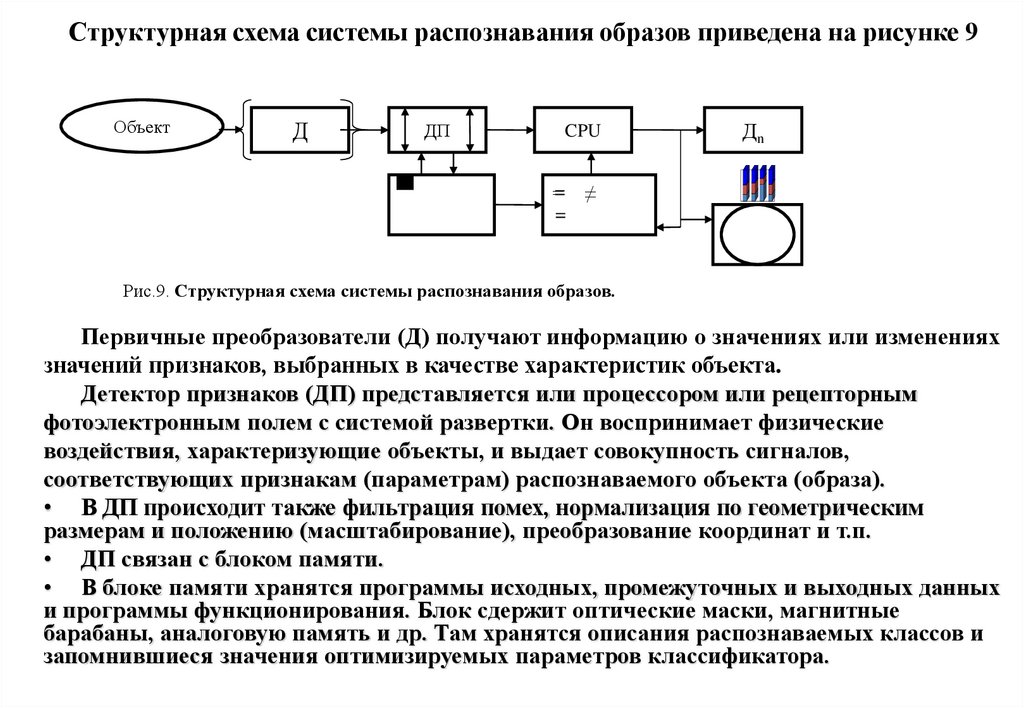
Структурная схема системы распознавания образов приведена на рисунке 9Объект
Д
ДП
CPU
Дn
== ≠
=
Рис.9. Структурная схема системы распознавания образов.
Первичные преобразователи (Д) получают информацию о значениях или изменениях
значений признаков, выбранных в качестве характеристик объекта.
Детектор признаков (ДП) представляется или процессором или рецепторным
фотоэлектронным полем с системой развертки. Он воспринимает физические
воздействия, характеризующие объекты, и выдает совокупность сигналов,
соответствующих признакам (параметрам) распознаваемого объекта (образа).
• В ДП происходит также фильтрация помех, нормализация по геометрическим
размерам и положению (масштабирование), преобразование координат и т.п.
• ДП связан с блоком памяти.
• В блоке памяти хранятся программы исходных, промежуточных и выходных данных
и программы функционирования. Блок сдержит оптические маски, магнитные
барабаны, аналоговую память и др. Там хранятся описания распознаваемых классов и
запомнившиеся значения оптимизируемых параметров классификатора.
50.
• Необходимым условием функционирования распознающей системы являетсяналичие сведений о классах совокупностей объектов. Эти сведения задаются
заранее или возникают в процессе обучения, когда на вход распознающей системы
последовательно подаются признаки образцов выбранных классов.
• Сравнение действительного образцового описания распознаваемых классов и
выработка сигналов ошибки производится в устройстве сравнения.
• Решение о принадлежности объекта (образа) к одному из введенных в
память классов вырабатывается в классификаторе CPU в соответствии с
приятым критерием распознавания или правилом решения в его
устройстве на основе сигналов, поступающих от ДП.
• Критерием распознавания называется правило, по которому строится
гиперповерхность, разделяющая распознаваемые образы на классы в
пространстве признаков. Классификатор выполняется в виде сети из
линейных пороговых элементов или вычислительного устройства.
• Если при этом система сообщает к какому классу принадлежит образ,
то процесс называется обучением с учителем, в другом случае
самообучением.
51.
Замечание.Специфика алгоритмов распознавания образов, применительно к задачам управления
интеллектуальным мобильным роботом.
Во-первых, для повышения быстродействия данных алгоритмов нет необходимости
на каждом такте расчета производить процедуру распознавания абсолютно всех образов,
находящихся на видеоизображении. Достаточно реализовать процесс распознавания
только одного образа, заданного каким-либо идентификатором (например, числовым).
Во-вторых, задача распознавания образов может подразделяться на две подзадачи:
•а) определение числа экземпляров заданного образа на видеоизображении.
•б) слежение за одним из экземпляров заданного образа.
• В третьих, необходимо организовать процесс обучения новым образам и
корректировки данных об уже обученных образах.
• Решение этих задач требует, чтобы блок "распознавание образов" находился в тесном
взаимодействии с системой управления, которая должна не только получать информацию
об обнаруженных объектах, но и с помощью специальных команд задавать различные
режимы его работы (например, задавать идентификатор образа для слежения). Поэтому,
кроме задачи непосредственного распознавания, необходимо решать обозначенный
спектр смежных задач.
52. Интерфейсы информационно – измерительных систем.
• Интерфейс (interface) –сопряжение, граница раздела, перегородка. Практически,интерфейс – это совокупность средств и методов взаимодействия двух систем,
устройств или программ для обмена информацией между ними. Он определяется
характеристиками систем, параметрами их соединений, сигналами обмена и т. п. В
зависимости от контекста понятие применяется как к элементу, так и к системе.
• Пользовательский интерфейс –это совокупность средств при помощи которых
пользователь общается с различными , необходимыми ему устройствами. Например,
вожжи являются интерфейсом системы лошадь – кучером;
• руль, педаль газа, тормоз - интерфейс системы водитель автомобиль;
• мышь, клавиатура , устройства ввода – элементы сопряжения пользовательского
интерфейса человека с компьютером.
• Интерфейс определяет уровень общения человека с компьютером. В этом случае
это правила взаимодействия операционной системы с пользователями.
• Современный интерфейс – совокупность технических и программных средств
обеспечивающих взаимодействие различных функциональных устройств,
вычислительных, управляющих и измерительных систем. Соответствующие системы
создаются из специальных модулей в соответствии с установленными правилами и
соглашениями по кодированию и синхронизации передаваемой информации,
механических и электрических соединений устройств вида сигналов и формы
представления информации.
53.
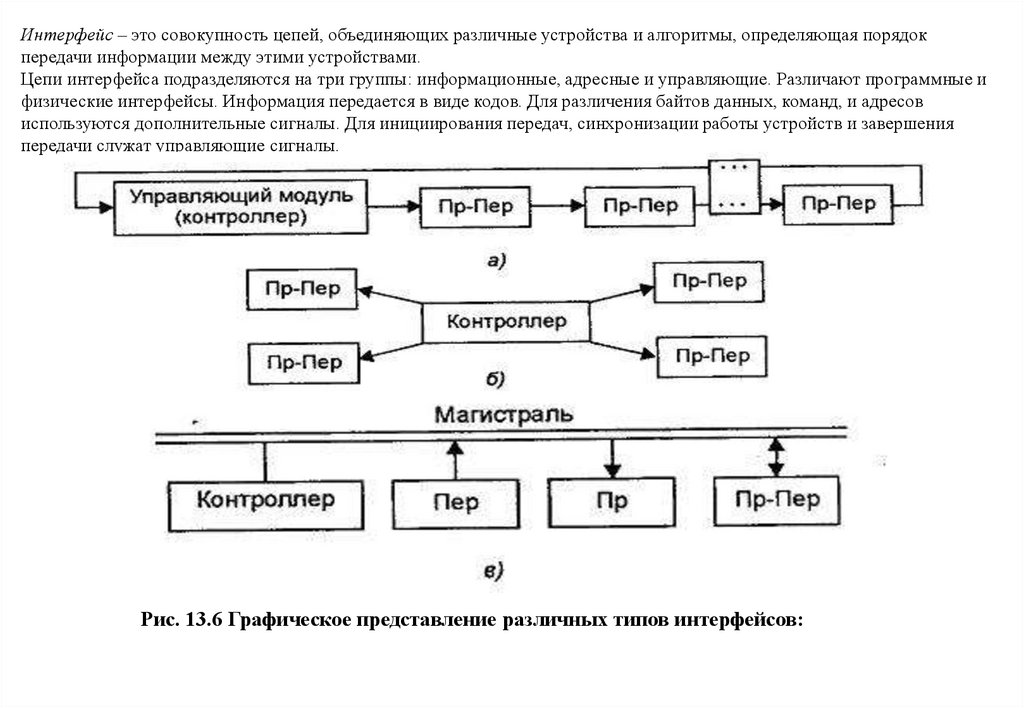
Интерфейс – это совокупность цепей, объединяющих различные устройства и алгоритмы, определяющая порядокпередачи информации между этими устройствами.
Цепи интерфейса подразделяются на три группы: информационные, адресные и управляющие. Различают программные и
физические интерфейсы. Информация передается в виде кодов. Для различения байтов данных, команд, и адресов
используются дополнительные сигналы. Для инициирования передач, синхронизации работы устройств и завершения
передачи служат управляющие сигналы.
Рис. 13.6 Графическое представление различных типов интерфейсов:
54.
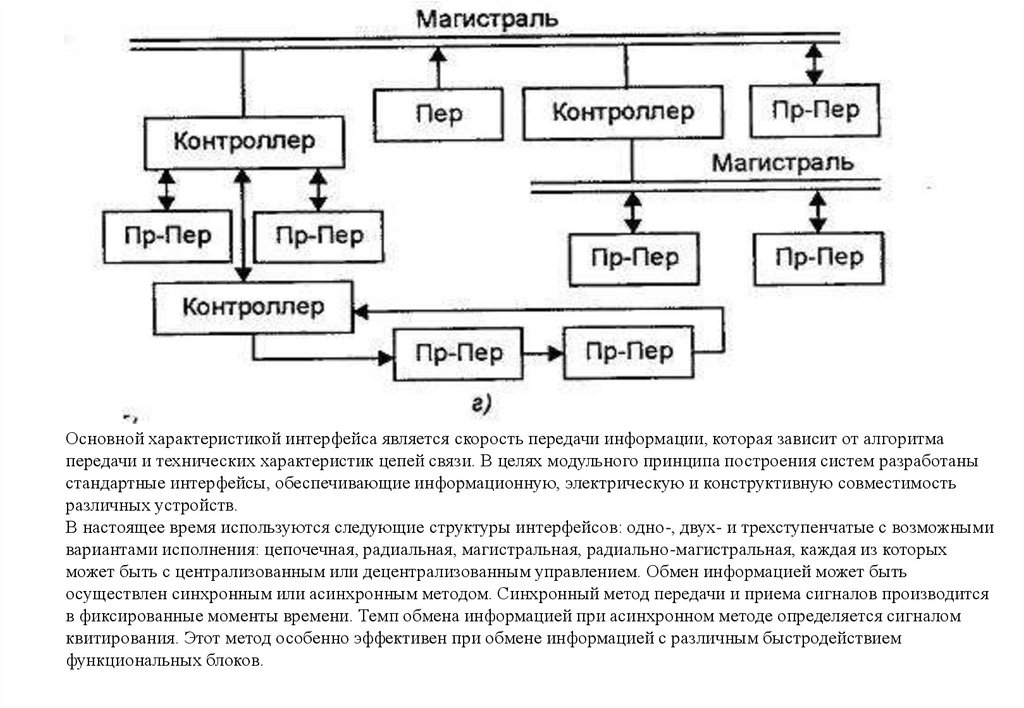
Основной характеристикой интерфейса является скорость передачи информации, которая зависит от алгоритмапередачи и технических характеристик цепей связи. В целях модульного принципа построения систем разработаны
стандартные интерфейсы, обеспечивающие информационную, электрическую и конструктивную совместимость
различных устройств.
В настоящее время используются следующие структуры интерфейсов: одно-, двух- и трехступенчатые с возможными
вариантами исполнения: цепочечная, радиальная, магистральная, радиально-магистральная, каждая из которых
может быть с централизованным или децентрализованным управлением. Обмен информацией может быть
осуществлен синхронным или асинхронным методом. Синхронный метод передачи и приема сигналов производится
в фиксированные моменты времени. Темп обмена информацией при асинхронном методе определяется сигналом
квитирования. Этот метод особенно эффективен при обмене информацией с различным быстродействием
функциональных блоков.
55.
Информационно-измерительные системы роботов содержат рядподсистем: измерительную, сбора, преобразования,
предварительной обработки данных и подсистемы управления
средствами измерений (СИ). Все подсистемы в ИИС, выполненные
в виде отдельных, самостоятельных изделий (приборов, блоков).
соединены между собой в единую систему.
Они подсоединяются к системе сопряжения и выполняют
определенные операции взаимодействуя друг с другом, передавая
информационные и управляющие сигналы через систему
сопряжения.
Для связи всех приборов (блоков) И.И.С. в единый комплекс и
выполнения функций: контроллерных, вычислительных,
тестовых, сервисных и распределенной обработки данных
используются микропроцессоры и микроЭВМ.
Конструктивное исполнение подсистем таково, что
характеристики вырабатываемых и принимаемых ими сигналов
позволяют упорядочить обмен информацией между отдельными
функциональными блоками (ФБ) системы.
56.
• Интерфейсной системой ИИС робота является совокупностьлогических устройств, объединенных унифицированным набором связей
и предназначенных для обеспечения информационной, электрической и
конструктивной совместимости.
• В промышленных роботах, где пользователем является система
управления, последняя связана с функциональными блоками специальными
электрическими линиями. В этом случае для определения интерфейса можно
использовать определение:
• Интерфейс – совокупность электрических линий, объединяющих
различные устройства и алгоритмы, определяющие порядок передачи
между этими устройствами.
• Электрические линии состоят из трех групп: информационные, адресные
управляющие.
• Основной структурной единицей интерфейса ИИС является
функциональный блок (ФБ), который представляет один или несколько
объединенных и взаимодействующих между собой измерительных
преобразователей.
• Информация передается в виде кодов, определенных чисел или словами.
Команды управления формируются в управляющем блоке (УБ) и воздействуют
на интерфейсные блоки через контроллер (К).
57.
Обмен между ФБ ИИС осуществляется через интерфейсные блоки (ИБ) покомандам,
организующим
обмен
данными:
информационными
и
управляющими сообщениями. Информационное сообщение содержит сведения о
значении измеряемого параметра, диапазоне измерения, времени измерения,
результатах контроля состояния измерительных каналов и др. Управляющее
сообщение содержит сведения о режиме работы ФБ, порядке выполнения ими
последовательности операций во времени, команде контроля состояния
измерительных каналов.
• Для инициирования передач, синхронизации работы устройств и завершения
передачи служат управляющие сигналы. Для различия байтов данных, команд
и адресов используются осведомительные сигналы.
• Такие интерфейсы определены международными, государственными и
отраслевыми стандартами.
• Стандарт ГОСТ 26016—81 ("Единая система стандартов приборостроения.
Интерфейсы, признаки классификации и общие требования") содержит четыре
признака классификации: 1.
способ соединения комплектов системы
(магистральный, радиальный, цепочечный, комбинированный); 2. способ
передачи информации (параллельный, последовательный, параллельнопоследовательный); 3. принцип обмена информацией (асинхронный,
синхронный); 4. режим передачи информации (двусторонняя одновременная
передача, двусторонняя поочередная передача, односторонняя передача).
58.
• При цепочном соединении единственный выход предшествующего блокасоединен с единственным входом последующего блока. Каждая пара источникприемник соединена попарно линиями от выходов предыдущих ФБ ко входам
последующих. Обмен данными происходит непосредственно между блоками или
приборами.
• При радиальном соединении, каждый
блок соединен с несколькими
блоками, с каждым отдельной независимой линией. В такой системе,, имеется
центральное устройство - контроллер, с которым каждая пара источникприемник связана с помощью индивидуальной группы шин. Под управлением
контроллера происходит обмен данными между каждым устройством и
контроллером.
• При магистральном соединении, входы и (или) выходы сопрягаемых блоков
соединены одной общей линией. В этом случае одно из устройств вырабатывает
сигнал запроса на обслуживание, а контроллер идентифицирует запрашиваемое
устройство. Когда контроллер готов к обмену данными, логически
подключаются цепи связи и начинается процесс обмена. Эти цепи остаются
подключенными, пока не будет передана нужная порция информации.
•По принципу обмена информацией интерфейсы подразделяют на
параллельные, последовательные и параллельно-последовательные.
• При параллельной передаче цифровых данных численное значение
величины, содержащее n битов, транслируется по информационным линиям,
вводится в интерфейс и воспринимается приемником.
59.
Устройства параллельного ввода-вывода информации позволяют согласоватьво времени процесс обмена данными между ЭВМ и периферийными
интерфейсными функциями.
• Контроллер может производить обмен данными только с одним из устройств.
Обмен информацией осуществляется синхронным или асинхронным
методами: при синхронном передача сигналов производится в фиксированные
моменты времени, при асинхронном темп обмена информацией определяется
сигналом квантования. Последний эффективен при обмене информацией между
блоками с различным быстродействием.
Соединение приборов и блоков осуществляется линиями связи (линиями
интерфейса). Линии интерфейса могут объединяться в группы для выполнения
одной из операций. Эти группы называются шинами. Если датчики
информации, удалены от процессора на десятки и сотни метров, то применяются
интерфейсы периферийных устройств. В таких интерфейсах используются как
параллельный, так и последовательный способы обмена информацией.
• Для связи всех приборов (блоков) И.И.С. в единый комплекс и выполнения
функций: контроллерных, вычислительных, тестовых, сервисных и
распределенной обработки данных используются микропроцессоры и микро ВМ.
• Кроме того, важное значение имеет метасистемма, обеспечивающая
выполнение всех вышеперечисленных функций и их согласование между собой.
60.
• Основными характеристикам интерфейса являются: функциональное назначение;структура организации связей; принцип обмена информацией; способ и режим обмена
данными; номенклатура шин и сигналов; количество линий для адресов и команд;
быстродействие; длина линий связи; число подключаемых устройств; тип линии связи.
Они определяются алгоритмом передачи и техническими характеристиками цепей.
Основные функции интерфейса состоят в обеспечении информационной,
электрической и конструктивной совместимости функциональных элементов системы.
Информационная совместимость - это согласованность взаимодействий
функциональных элементов системы в соответствии с совокупностью логических
условий. Логические условия определяются:
• . структурой и составом унифицированного набора шин;
• . процедурами по реализации взаимодействия и последовательности их выполнения
для различных режимов функционирования;
• . способами кодирования и форматами данных, команд, адресной информации и
информации состояния;
• . временными соотношениями между управляющими сигналами.
Электрическая совместимость — это согласованность в системе шин статических и
динамических
параметров
передаваемых
электрических
сигналов.
Условия
электрической совместимости определяют:
• . тип приемопередающих элементов;
• . соотношение между логическим и электрическим состояниями сигналов и пределы
их изменения;
• . схему согласования, допускаемую длину и порядок подключения линий к разъемам;
• . требования к источникам и цепям электрического питания;
• . требования к помехоустойчивости и заземлению.
61.
Условия конструктивной совместимости определяют:. типы соединительных элементов (разъем, штекер);
. распределение сигналов интерфейса по контактам соединительных элементов;
. типы конструкции платы, каркаса, стойки;
. Выполнение информационных электрических и конструктивных условий интерфейса
необходимо, но не достаточно для взаимного сопряжения устройств и обмена данными
между ним и конструкцией кабельного соединения.
. Эти устройства должны выполнять в определенной последовательности операции,
связанные с обменом информации: распознавать адрес сообщения, подключаться к
линиям интерфейса, передавать сообщение в интерфейс, принимать его из интерфейса и
др.
Рассмотренные интерфейсы, выполняемые на основе модульного принципа
построения, используемые для компоновки различных комплексов из стандартных
измерительных приборов, устройств ввода- вывода и управляющих устройств
называются приборными интерфейсами.
В ИИС используются следующие интерфейсы:
ЕЕЕЕ-480, ISA, EISA, PSKI, KАMAK и др.
Приборный
интерфейс
предназначен
для
обеспечения
взаимодействия
программируемых и непрограммируемых приборов и построения на их основе
информационно – измерительных систем.
Соединение приборов в нем осуществляется через многопроходный магистральный
канал общего пользования (КОП), длиной не более 20 метров. Число приборов ,
подключаемых к магистрали не более 15.
62.
• Обмен информацией между приборами происходит под управлением контроллера.Всего регламентируется десять интрфейсных функций. Каждая из этих функций
позволяет прибору выполнять прием , передачу и определенную обработку сигналов.
Функции реализуются как аппаратно, так и программно.
• Например, Интерфейс KАMAK применяется для разветвленных систем сбора
информации с большим числом первичных преобразователей (датчиков) и служит для
построения ИИС с двумя уровнями централизации. Основными его конструктивами
являются: крейт (каркас), модуль, стойка. Крейт имеет 25 станций (ячеек), в которые
вставляются модули ( в виде кассет).Из них 23 станции рабочие, служат для
подключения модулей, две вводятся для контроллера крейта.
• Для связи приборов ИИС в единый комплекс используются Микропроцессоры и
микроЭВМ и выполняют контроллерные, вычислительные, тестовые, сервисные и
функции обеспечивают распределенную обработку данных.
• Контроллерные функции – это
• управление измерительной цепью, т. е. переключение каналов и диапазонов,
подключение образцовых мер;
• управление измерительными усилителями;
• управление А.Ц.П.;
• управление средствами общения с оператором, т.е. клавиатурой, индикаторами,
звуковой сигнализацией и дисплеем;
• управление регистраторами, т. е. печатающими устройствами, самописцами,
графопостроителями, накопителями на магнитных носителях;
• управление внешней памятью, т.е. дополнительными внешними модулями памяти.
63.
• Вычислительные функции – это первичная, вторичная и окончательная обработкаданных. В это входит: калибровка, нормирование, масштабирование, фильтрация,
сжатие данных, распознавание, устранение выбросов, статистический, спектральный и
амплитудно – временной анализ.
• Тестовые функции – это обнаружение и локализация неисправности, как правило, для
типового элемента. Применяются тестирования:
1). с помощью внешних микропроцессорных средств;
2). автономное тестирование;
3). комбинированное.
• В первом случае применяются специальные тестеры микроЭВМ. Программы
тестирования входят в программное обеспечение тестера или самой системы. Во втором
случае функции тестирования выполняет основной процессор ИИС. Тестирование
производится в двух основных режимах: определения работоспособности и диагностики
неисправностей. При этом программы тестирования хранятся или во внешнем
устройстве памяти, или в тестовом ПЗУ.
• Сервисные функции. Они расширяют возможности измерительных средств и систем со
всесторонними микропроцессорами или микроЭВМ, увеличивающими объем
информации, число режимов измерений и обработки , число параметров и их
комбинаций, объем визуальной и звуковой информации, число альтернативных
вариантов измерений и их обработки.
• При этом можно выделить ряд этапов измерения и анализа с применением диалога:
ввод задания, сбор и предварительную обработку первичной информации, вторичную
обработку и интерпретацию результатов, вывод результатов, исследования для
интерпретации документации, архивации и управления.
64.
Распределенная обработка данных. Вычислительные функции распределяютсямежду программируемыми контроллерами. Этим обеспечивается высокая надежность
управления И.И.С.
Использование микропроцессоров и микроЭВМ повышает точность,
быстродействие, надежность, помехоустойчивость, делает систему многофункциональной
повышает удобство представления, хранения и регистрации улучшает все
характеристики И.И.С. Это позволяет создавать интеллектуальные приборы.
Интеллектуальные измерительные системы способны выполнять все функции
измерения и контроля в реальном времени. При автономном функционировании такая
система обеспечивает непрерывные измерения и контроль измеряемых параметров , сбор
данных и обработку сигналов. Модульная конструкция позволяет производить
постепенное расширение существующей системы посредством введения в нее
дополнительных модулей и превращения ее систему средств цифрового управления
измерительным экспериментом.
Интеллектуальные измерительные системы имеют значительные преимущества
перед традиционными. Они обладают такими свойствами как
Универсальность – которая обеспечивается стандартными интерфейсами, с помощью
которых они могут подключаться к любым системам и оборудованию;
Высокая надежность на каждом системном уровне;
Высокое быстродействие контуров управления процессами измерения и контроля;
Взимозаменяемость.
65. Измерение, единицы физических величин.
• Измерение –это процесс получения информации о количественном значениифизической величины, которая является характеристикой (параметром)
физического объекта (системы, явления).
• Фактически это определение опытным путем значения физической
величины. Оно производится с помощью технических средств, содержащих
единицу значений измеряемой физической величины, выбранную из принятой
шкалы, путем проведения необходимых операций, обеспечивающих
определение соотношения измеряемой величины с ее единицей.
• Технические средства, используемые для вещественного воспроизводства
единицы измерения или ее кратного значения, называются мерами.
• Различные физические объекты можно сравнивать между собой только по
одинаковым характеристикам (свойствам) (по объему, весу, цвету, силе тока,
напряженности и т.д.).
• Ряды, составленные по однородным свойствам различных объектов
называются натуральными рядами. В них каждая величина больше всех
предыдущих и меньше всех последующих. Например, ряд точек плавления
раразличных материалов. Из этого ряда выбираются точки, являющиеся
реперами. Так для шкалы температур выбраны точки: плавления льда – 0,00;
плавления серебра - 960,5; плавления золота – 1063,0; кипения кислорода –(182,97); кипения воды - 1000; кипения серы – 444,60 .
• До проведения измерений неопределенность значений физической
величины характеризуется неизвестностью интервала. Результатом измерения
является интервал. С точки зрения теории информации измерение представляет
сужение области неопределенности от полной до единицы шкалы выбранного
интервала
66.
Особенность результата измерения состоит в том, что он никогда непредставляет точного значения измеряемой величины, а является лишь узким
интервалом ее возможных значений.В связи с этим при измерениях
используются понятия истинного и действительного (номинального) значения
физической величины.
• Истинное значение физической величины это такое значение, которое
количественно и качественно идеально характеризует ее и которое можно
получить в результате проведения бесконечного числа измерений по
совершенной методике идеальным средством измерений.
• Действительное (номинальное) значение физической величины – это
значение, полученное при проведении эксперимента и используемое в качестве
оценки истинного значения этой физической величины. Измерение исходит из
неизвестности интервала значений измеряемой величины и представляет
процесс сужения области неопределенности значений. Особенность результата
измерений в том, что он никогда не представляет точного значения измеряемой
величины, а указывает лишь интервал возможных значений.
• Для каждой физической величины существует собственная единица
измерения. Эти единицы в настоящее время сведены в систему единиц CИ, в
которой основными являются семь единиц:
67.
1. Метр – единица длины, равная длине пути, который проходит свет в вакуумеза 1/299792458 долю секунды. (Существует эталон.)
2. Килограмм – единица массы, равная массе международного прототипа
килограмма – цилиндра из платиноиридия диаметром 39 мм и высотой 39 мм
3. Секунда –единица времени; равна 9.192.631.770 периодам излучения,
соответствующих переходу между двумя сверхтонкими уровнями основного
состояния атома цезия 133.
4. Ампер – единица силы электрического тока, который проходя по двум
прямолинейным параллельным бесконечным проводникам, ничтожно малого
кругового сечения, расположенным на расстоянии 1м друг от друга в вакууме
вызывает на каждом участке длиною 1 метр силу взаимодействия 2*10-7 Н.
5. Кельвин – единица термодинамической температуры, равная 1/273,16 части
температуры тройной точки чистой воды, фазового равновесия льда, жидкости и
пара (Т = 273,16 K, p=610,6 Па).
6. Моль – единица количества вещества, в котором содержится столько же
структурных элементов (атомов, молекул, электронов и др.), сколько атомов в 12
г. изотопа углерода – 12 В 1 моле содержится 6,022*1023 структурных элементов
(грамм – молекула).
7. Кандела – единица силы света, излучаемого черным телом перпендикулярно
поверхности площадью 1/60 см2 при температуре 2042,5 К (температура
затвердевания платины при нормальном давлении).
В систему СИ входят производные единицы, которые образуются когерентно
из основных единиц и служат единицами для других физических величин.
68. Средства измерений (СИ).
Средство измерений (СИ) -это техническое средство, с помощью которого производятся
измерения значений физической величины.
• Оно обладает нормированными метрологическими характеристиками, хранит и/или
воспроизводит единицу этой физической величины, размер которой остается неизменным в
течение всего времени измерений.
• Средства измерения классифицируются по назначению и по присущим им
метрологическим функциям. По назначению они представляются как меры,
измерительные приборы, измерительные установки, измерительные системы.
• Мера – это средство измерений, предназначенное для воспроизведения и/или хранения
физической величины определенного (определенных) размера, значение которого
выражены в общепринятых единицах и известны с необходимой точностью.
• Примерами физических величин для которых существуют меры являются длина, масса,
объем, твердость, электрическое сопротивление, электрическая емкость, индуктивность,
ЭДС, частота колебаний, температура и др. Для некоторых физических величин мер не
существует. Таковыми являются время, объемная плотность, скорость, сила, энергия,
мощность и др.
• Меры бывают однозначными (эталон), многозначными (линейка), наборами и
магазинами мер.
• По метрологическому назначению меры делятся на эталонные, образцовые, и рабочие.
Эталонные являются эталонами, служат для воспроизведения и хранения единиц
измерения в метрологических институтах. Образцовые служат для проверки по ним других
средств измерения и подразделяются на разряды с убывающей точностью. Высший
(первый) разряд проверяется по эталону, низший служит для проверки рабочих
измерительных средств, используемых в практической деятельности.
69.
• Номинальное значение однозначной меры указывается на ней иприписывается ей при изготовлении. Ее действительное значение
определяется ее сравнением с более точной образцовой мерой.
Алгебраическая разность между номинальным и действительным
значениями называется погрешностью меры.
• Часто значение, получаемое при измерении исследуемой физической
величины, соответствует значению другой физической величины,
регистрируемой СИ.
• В этом случае происходит измерительное преобразование –
отражение размера одной физической величины размером другой,
функционально с ней связанной. Например, при регистрации
температуры воздуха с помощью термометра фактически измеряется
высота столба жидкости.
• Средство измерения – термометр является измерительным
преобразователем, реализующим преобразование входного сигнала
(высоты столба жидкости) в выходной (значение температуры
воздуха).
70.
• Измерительный преобразователь (ИП) – этотехническое средство с нормативными метрологическими
характеристиками, используемое для преобразования значений
измеряемой физической величины в значения другой исследуемой
физической величины, представляющие измерительный сигнал,
предусмотренный на выходе.
• Измерительный преобразователь, как правило, входит в состав
измерительного прибора или установки.
• Измерительные преобразователи классифицируются по характеру
преобразования:
• преобразователи электрических величин (шунты, трансформаторы и
др.);
• преобразователи магнитных величин в электрические (феррозонды,
измерительные катушки и др.);
• преобразователи неэлектрических величин в электрические (термо –
и тензо преобразователи, резистивные и др.)
71. Измерители.
Измерители.
Измерительный прибор – средство измерения, предназначенное для
получения значений измеряемой физической величины в установленном диапазоне.
Они бывают аналоговые и цифровые, предназначенными для измерения
электрических или неэлектрических величин, интегрирующие и суммирующие,
измеряют вполне определенные величины. Часто прибор формируется из
последовательного ряда измерительных преобразователей, образующих канал
передачи информации.
• Например, прибор для измерения механических усилий состоит из тензодатчика,
который деформируется под действием силы и изменяет свое электрическое
сопротивление; моста сопротивлений, в котором изменение сопротивления датчика
превращается в электрический сигнал изменения тока или напряжения; усилителя
сигнала и регистратора , превращающего электрический сигнал на выходе усилителя в
цифру или принятый код.
• Работа преобразователя, как правило, происходит в сложных условиях
деятельности объекта, на котором проводятся измерения. Вследствие этого
изменяется множество параметров, определяющих состояние и поведение объекта и
тем или иным способом воздействующих на преобразователь. Поскольку
преобразователь предназначен для измерения значения одного параметра, то
воздействия других параметров рассматриваются как помехи, искажающие
получаемый результат.
Например, при измерении силы тока тепловым амперметром на деформацию
проволочки (преобразователя) влияет температура внешней среды, магнитное поле и
др. Поэтому преобразователь должен быть невосприимчив к помехам, т. е.
регистрировать их как малые величины по сравнению с основным сигналом.
72.
RiR1
R3
RН
U0
R2
UН
UВЫХ
Регистр
R4
F
73.
Измерительная установка – это совокупность
функционально объединенных мер, измерительных преобразователей,
измерительных приборов и других устройств, предназначенная, как правило,
для измерения нескольких физических величин.
Измерительную установку, применяемую для проверки, принято
называть поверочной установкой , а входящую в состав эталона – эталонной
установкой. Большие измерительные установки называют измерительными
машинами.
Измерительная система - это совокупность функционально
объединенных мер, измерительных преобразователей, измерительных
приборов, ЭВМ и других технических средств, размещенных в разных точках
исследуемого объекта с целью измерения одной или нескольких физических
величин, соответствующих исследуемому объекту. Как правило, они выдают
сигналы, предназначаемые для различных целей.
Измерительные системы в зависимости от назначения бывают
информационными, контролирующими и управляющими.
Примером измерительной системы является радионавигационная
система, состоящая из нескольких измерительно – вычислительных
комплексов, разнесенных в пространстве на значительные расстояния.
74.
Метрологические характеристики.• Метрологические характеристики используемых средств измерений
характеризуют качество получаемых с их помощью результатов и
соответствующих им погрешностей.
• Для каждого вида СИ устанавливаются свои значения метрологических
характеристик.
• К ним относятся:
• функция преобразования,
• погрешность измерений,
• чувствительность,
• цена деления шкалы,
• порог чувствительности,
• диапазон измерений,
• вариация показаний .
• Метрологические характеристики устанавливаемые нормативно –
техническими документами, называются нормируемыми метрологическими
характеристиками, определяемые экспериментально действительными
метрологическими характеристиками.
• От того насколько эти характеристики точно выдержаны при изготовлении
и стабильны при эксплуатации СИ зависит точность результатов , получаемых
с помощью этого СИ.
75.
Функция преобразования ( статистическая характеристика преобразования) – этофункциональная зависимость
α = f ( x ) между информативными параметрами
выходного α и входного X сигналов СИ. Эта зависимость должна быть однозначной и
представляется графиком, таблицей или аналитической функцией. Наиболее часто эта
функция является линейной и определяется двумя параметрами
α = α0 + Sx.
• α0 - нулевым уровнем, т. е, начальным значением выходной величины,
соответствующим нулевому или установленному значению входной величины;
• S - чувствительностью преобразователя, определяющего наклон прямой.
• Для каждого типа СИ определяется и указывается в документации номинальная
функция преобразования, характеризующая функцию преобразования для
преобразователей данного типа, изготовленных в используемой партии. Определение
этой характеристики производится следующим образом.
• Поскольку измерительный преобразователь регистрирует не только исследуемый
сигнал, но и помехи, то в силу случайных значений помех одному и тому же значению X =
const , будут соответствовать различные значения выходной величины α ± Δ, где Δ погрешность. Если Δ = const , то график функции имеет вид, представленный на рис. 1
α +Δ
α
α(x)
α -Δ
0
x
Рис.1
x
76.
• На нем линия α ( x ) представляет идеальную функцию преобразования, расположеннуюв доверительном интервале, определяющем разброс значений вследствие влияния помех.
Практически функция преобразования может быть представлена любой прямой из этого
интервала и, следовательно, параметры α0 и S могут принимать различные значения.
• Номинальная функция преобразования определяется для среднеарифметических
значений α0 и S, измеренных для изготовленной партии измерительных преобразователей
Вследствие погрешностей реальная функция преобразования отличается от номинальной.
2 Погрешность СИ – важнейшая метрологическая характеристика, определяемая как
оценка разности между результатами, получаемыми средствами измерений, и истинным
значением измеряемой физической величины. Мерой погрешности является
экспериментально определяемая величина.
3 Чувствительность СИ - характеристика, определяемая отношением изменения
величины выходного сигнала к вызывающему его изменение реально измеряемой
величины. В практике используется понятие абсолютной и относительной
чувствительности. Абсолютная чувствительность определяется по формуле
S = Δα/Δx
относительная
S0 / ( x / x) ,
где Δα - изменение величины выходного сигнала;
Δx - изменение измеряемой величины;
x – значение измеряемой величины
Если функция преобразования СИ линейна, то его чувствительность постоянна, при
нелинейной функции преобразования чувствительность СИ является функцией
измеряемой величины X.
77.
4 Порог чувствительности – наименьшее значение изменения измеряемой величины,начиная с которой осуществляется ее измерение используемым СИ. Значение порога
чувствительности выражается в единицах входной величины.
5 Цена деления шкалы ( постоянная прибора) – разность значений измеряемой
величины, соответствующая двум соседним делениям шкалы СИ.
Приборы с равномерной шкалой имеют постоянную цену деления шкалы, что
соответствует их постоянной чувствительности. В приборах с неравномерной шкалой цена
деления может быть разной на разных участках шкалы и в этом случае нормируется
наименьшая цена деления.
Цена деления шкалы СИ определяется как число единиц измеряемой величины,
соответствующих одному делению шкалы прибора и может быть определена через
абсолютную чувствительность прибора.
В силу наличия погрешностей реальная функция преобразования имеет вид
• α ± Δ = ( α0 ± Δ0) + ( S ± γ ) x = ( α0+ Sx) ± Δ;
Очевидно, значение неопределенности будет 2 Δ. Она и определяет цену деления
шкалы.
6 Диапазон измерений – область значений измеряемой величины, в которой нормированы
допускаемые пределы погрешностей СИ.
• Значения измеряемой величины, ограничивающие диапазон снизу и сверху (справа
слева) называются соответственно верхним и нижним пределами измерений. Для
повышения точности измерений диапазон измерений разбивается на поддиапазоны .
78.
Область значений шкалы прибора, ограниченную начальными и конечными
значениями шкалы, называется диапазоном показаний.
7 Для СИ, результаты измерений которых представляются в цифровом коде,
указывается цифра младшего разряда (единицы младшего разряда цифрового
отсчетного устройства) , вид выходного кода ( двоичный, двоично – десятичный) и
число разрядов кода.
8 Для оценки влияния СИ на режим работы объекта исследования используется
значение полного входного сопротивления Zвх, которое определяет мощность,
отбираемую СИ от объекта. Допустимая нагрузка на СИ зависит от его выходного
сопротивления Zвых,. Чем оно меньше, тем больше допустимая нагрузка на СИ.
9 Вариация показаний – наибольшая вариация выходного сигнала СИ при
неизменных внешних условиях. Она является следствием трения и люфтов,
механического и магнитного гистерезиса элементов и др.
• Корме метрологических характеристик для оценивания СИ важны такие
показатели как надежность, электрическая прочность, сопротивление изоляции,
устойчивость к изменению параметров внешней среды и др.
• Надежность СИ - это его способность сохранять нормированные характеристики
при определенных условиях работы в течение заданного времени. Основными
критериями надежности СИ являются вероятность и продолжительность
безотказной работы. Первое определяется вероятностью отказов в течение
определенного промежутка времени; второе – отношением времени работы СИ к
числу отказов за это время
79.
• Измерения бывают статическими, при проведении которыхизмеряемая величина не изменяется, и динамическими, в процессе
выполнения которых измеряемая величина изменяется.
• Динамические характеристики – это характеристики,
определяющие инерционные свойства элементов СИ. Они
определяют зависимость выходного сигнала СИ от изменяющихся
во времени величин: параметров входного сигнала, сигналов от
внешних источников.
Динамические характеристики представляются:
дифференциальными уравнениями, описывающими работу
средств измерений,
переходными функциями,
амплитудными и фазовыми характеристиками,
передаточными функциями,
полосами регистрируемых частот.
Динамические свойства средств измерений определяют их
динамическую погрешность, которая возникает при измерении
изменяющейся во времени физической величины.
80.
• Переходная функция, иногда называемая переходным процессом, в теории
управления используется для определения реакции динамической системы на входное
воздействие в виде функции Хевисайда (или дельта функции Дирака), при заданных
начальных условиях. В электронике переходную функцию часто определяют как изменение
выходных сигналов системы как реакцию на изменение входного сигнала от нуля до
единицы за достаточно короткий промежуток времени.
• Передаточная функция — один из способов математического описания динамической
системы. Используется в основном в теории управления , связи и при цифровой обработке
сигналов. Представляет собой дифференциальный оператор, выражающий связь между
входом и выходом линейной стационарной системы. Зная входной сигнал системы и
передаточную функцию, можно восстановить выходной сигнал.
• В теории управления передаточная функция непрерывной системы представляет собой
отношение преобразования Лапласа выходного сигнала к преобразованию Лапласа
входного сигнала при нулевых начальных условиях.
• Если x (t ) входной сигнал линейной стационарной системы, а
— её выходной
сигнал. Тогда передаточная функция такой системы записывается в виде:
y (t )
W ( s) Y ( s) X ( s)
st
Y ( s ) y (t )
dt — преобразования Лапласа для сигналов
• , где
0
соответственно:
• Амплитудная характеристика - это зависимость выходного напряжения от входного
синусоидального напряжения при неизменной частоте .
81.
• Классификация погрешностей.•При проведении измерений производятся следующие действия:
• а) выбор модели объекта измерения;
• б) выбор метода измерения;
• в) выбор средства измерения;
• г) проведение опытов для получения результатов.
• Каждое из этих действий сопровождается предположениями которые
создают отклонения от реального объекта и/или процессов. Поэтому
получаемые при проведении опытов значения физических величин отличаются
от их истинных значений. Это отличие называется погрешностью измерения.
• Принято считать, что измерение проведено, если представлены значение
(оценка) измеряемой физической величины и оценка отклонения этого значения
от ее истинного значения.
• Следует различать погрешность средств измерений и погрешность
измерений. Первая – это погрешность измерительного прибора, создаваемая его
конструкцией и системой регистрации. Она является частью погрешности
измерений, в которую входят: погрешность от замены объекта моделью,
погрешность применяемого метода, искажение получаемых результатов
внешними условиями, влияние квалификации субъекта, проводящего
измерения и др. Большое число источников погрешностей, изменение величины
погрешностей от опыта к опыту создает случайную составляющую
погрешности измерений, которая является определяющей в общем значении.
82.
Погрешности средств измерений представляются в виде:1. Абсолютных погрешностей, выражаемых в единицах измеряемой
физической величины и определяемых в виде разности между значением,
полученным при измерении Xизм , и величиной принятой за оценку истинного
значения X0
Δ = Xизм – X0
2. Относительных погрешностей, представляемых отношением
абсолютной погрешности СИ к результату измерений или к оценке истинного
значения измеряемой величины
δотн=( Δ/XД)*100
Для измерительного прибора величина δотн характеризует
погрешность в заданной точке шкалы. Она зависит от значения измеряемой
физической величины и имеет наименьшее значение в конце шкалы
прибора.
3. Приведенная погрешность – это относительная погрешность,
представляемая отношением абсолютной погрешности СИ к условно
принятому значению физической величины, постоянному для всего
диапазона измерений или выбранной части этого диапазона:
δприв= (Δ/Xнорм)100,
где Xнорм – нормирующее значение, т.е. значение по отношению к
которому рассчитывается погрешность. Это может быть верхний предел
измерений СИ, длина шкалы и др.
83.
3. По характеру изменения погрешности СИ определяются как систематические, случайные ипромахи.
4. Систематическая погрешность - это составляющая погрешности СИ, которые являются
постоянными (сохраняющими свою величину и знак при различных опытах) или
закономерно изменяющимися. Первые возникают от конструктивных отклонений (так
называемые инструментальные ошибки), от условий при которых производятся измерения,
от ошибок в градуировке шкалы и др. Их величина и знак могут различаться у однотипных
приборов. Вторые возникают вследствие неточности модели и метода измерения, а так же
вследствие наличия переменных внешних условий. Эти погрешности в процессе измерений,
как правило, не обнаруживаются и могут быть устранены при контрольных испытаниях. К
ним можно отнести так называемые прогрессирующие погрешности, возникающие в
приборах за счет изменения с течением времени характеристик деталей.
5. Случайные погрешности - это неопределенные по значению и происхождению погрешности,
наличие которых приводит к неоднозначности показаний СИ. Они не могут быть
обнаружены при единичном измерении и, следовательно, не могут быть предсказаны. Но для
совокупности значений, получаемых при многократных измерениях, можно установить их
закон распределения и определить частоту появления различных значений. Наличие
случайных погрешностей при измерениях обнаруживается по разбросу результатов,
возникающему при измерении одной и той же величины при одинаковых условиях
проведения опытов.
6.
Их появление это стационарный случайный процесс, который описывается стационарной
случайной функцией, принадлежащей классу функций, у которых математические
ожидания сохраняют одно и то же постоянное значение с течением времени и
корреляционные функции которых зависят только от разности значений времени.
84.
7.Промахи – грубые погрешности, как правило, значительно отличающиеся по величине от
полученной совокупности погрешностей и их среднего значения. Они возникают вследствие
ошибок оператора, сбоя в работе блоков СИ или резкого изменения параметров внешней среды.
Существуют статистические методы определения таких погрешностей и удаления
соответствующих данных.
По зависимости от значений измеряемой физической величины погрешности СИ
определяются как аддитивные, не зависящие от значений входной величины X, и
мультипликативные, пропорциональные величине X. Эти термины служат для описания полосы
погрешностей СИ как это показано ниже на рисунке 2.
8. Аддитивная погрешность, (Δ ад) является постоянной по величине при всех значениях X.
Ее источники инструментальные ошибки, внешние условия (наводки), вибрации и др. Она
проявляется как погрешность нуля Δ0, или погрешность дискретности в приборах с цифровым
отсчетом. От размера этой погрешности зависит наименьшее значение входной величины, т. е.
порог чувствительности СИ.
9.
Мультипликативная погрешность - это погрешность чувствительности. Она зависит от
чувствительности прибора и изменяется пропорционально текущему значению входной
величины X. Источником этой погрешности являются : погрешности регулировки отдельных
элементов СИ, старение элементов, изменение их характеристик, влияние внешних факторов.
α
α
Δ0
-Δ0
0
X
a)
0
б)
X
Рис. 2. Полосы погрешностей. а) аддитивная ; б) мультипликативная.
85.
Аддитивные и мультипликативные погрешности содержат систематические и случайныесоставляющие. Их суммарная погрешность определяется как арифметическая сумма
составляющих.
Графики зависимости погрешностей от величины входного сигнала приведены на Рис. 3
Δад
0
Δ
Δм
Xнорм
а)
X
0
Xнорм
б)
X
0
Xнорм
X
в)
Рис. 3. Графики погрешностей: а) аддитивной; б) мультипликативной; в)суммарной.
В зависимости от характера изменения измеряемой физической величины погрешности СИ могут
быть статическими и динамическими.
Статическая погрешность – это погрешность СИ, возникающая при измерении физической
величины, сохраняющей неизменным свое значение.
Динамическая погрешность - это погрешность СИ, возникающая при измерении физической
величины, изменяющейся в процессе измерения. Она возникает вследствие инерционных
свойств СИ и может быть значительно уменьшена за счет правильного выбора частотных
характеристик.
86. Модели измерительного процесса.
• Каждый материальный объект или реальная система характеризуется большим(бесконечным) числом параметров, которые могут изменяться во времени и поэтому
рассматриваются как переменные.
• Для решения конкретной задачи, об изменении значения какого – либо параметра
исследуемого объекта при воздействии на него переменных условий, как правило,
используется математическая модель этого объекта.
• Представляется модель в виде алгебраических и трансцендентных уравнений,
обыкновенных дифференциальных уравнений, уравнений в частных производных,
переходных и передаточных функций, описывающих связь исследуемого параметра с
другими параметрами.
• В этом случае для описании объекта (или системы) выбирается одно из множества
возможных представлений, содержащее конечное число переменных. Это представление
принимается за модель объекта (системы), подлежащую исследованию. Фактически
исследуется не реальный объект, а его модель, с каким - то приближением отражающая
определенные свойства объекта, интересующие исследователя.
• Регистрируемая характеристика объекта представляется значениями соответствующего
параметра объекта, который в практике называется «откликом». Остальные параметры
(называемые «факторами») , включенные в модель, при изменении их значений вызывают
изменение величины отклика.
• Факторы включенные в модель считаются «существенными» в смысле влияния на
состояние объекта, не включенные в описание (модель) переменные предполагаются
«несущественными».
• Таким образом, можно определить, что модель – это система, которая совпадает с
реальной системой по отношению к параметрам, предполагаемым «существенными», и
отличается от нее по отношению к параметрам, предполагаемыми «несущественными».
• Математическая модель объекта измерения описывает взаимодействие между
параметрами выхода (откликами) и входа (факторами) при функционировании объекта для
установившегося и/или переходного процессов, т. е. в статике и динамике.
87.
• Например, артиллерийский снаряд характеризуется массой, формой поверхности,причем желательно отдельных частей: головной части, донной части поясков и др.,
чистотой обработки поверхности, распределением масс и т. д. Его движение помимо
указанных параметров определяется характеристиками среды , в которой происходит его
движение, плотностью , вязкостью , температурой , составом и др., а также силами,
действующими на него, и его кинематическими параметрами: скоростью, ускорением и
др.
• Математическая модель его движения представляется системой дифференциальных
и обыкновенных уравнений, в которой учитываются влияние всех известных
«существенных»параметров, Решение этой системы при заданных начальных условиях
представляет в аналитическом виде связи между параметрами. В практических
приложениях - это зависимости кинематических параметров от характеристик снаряда
и среды.
• В этой модели кинематические параметры: путь, скорость , ускорение выступают в
роли отклика, остальные параметры рассматриваются как факторы.
• Качество модели определяется полнотой учета факторов. Однако, в зависимости от
конкретной задачи, учет всех факторов не всегда необходим. Например, при настильной
стрельбе хорошие результаты получаются , если рассматривается одномерное движение.
Тогда скорость «снаряда» можно определять по формуле,
V V0 e ax
• где
C x S
a
2m
• В иной постановке, в качестве отклика может быть выбран другой параметр,
Например. прочность снаряда, количество осколков и т.д.
88.
Как ранее отмечалось в процессе проведения измерений участвуют:
а) объект измерения, который представляется значениями параметра (отклика),
выбранного для характеристики объекта,
б) средства измерения и принятый метод измерения,
в) оператор, проводящий измерения.
Все операции происходят по заранее установленным правилам и проводятся в
определенной среде, подверженной внешним воздействиям.
• При проведении измерения (опыта)значение характеризующего объект параметра
(отклика), предполагается неизменным. Значения остальных параметров существенных
и несущественных , участвующие в этом процессе изменяются от опыта к опыту..
Эти изменения у существенных факторов производятся оператором, т.е. являются
предсказуемыми, неслучайными величинами, у несущественных факторов они
непредсказуемы и, следовательно, являются случайными величинами.
• Изменения несущественных факторов влияют на результаты измерений. Поэтому
при повторных измерениях результаты будут отличаться и тем сильнее, чем больше
параметров было неучтено и чем сильнее они меняются. Однако, всегда можно провести
оценку тех явлений, которые влияют на результат и определить возникающую
погрешность измерений.
•Практически процесс измерения, то есть эксперимент, в зависимости от решаемой
задачи, может быть «активным» или «пассивным».
• В первом случае при проведении измерений экспериментатор влияет на состояние
исследуемого объекта, изменяя значения «существенных» параметров объекта в
соответствии с планом эксперимента,
• во втором – процесс измерений состоит из регистрации наблюдаемых значений
отклика - параметра , характеризующего состояние объекта, и соответствующих
изменений значений параметров, определенных как «существенные».
89.
При измерениях промышленных объектов, как правило, применяется «активный»эксперимент. В этом случае, при постановке задачи по измерению, выделяется
подлежащая измерению физическая величина (отклик), определяются «существенные»
параметры объекта измерения, т. е. принимается модель объекта измерения.
конкретизируются рабочие условия, задается предельная погрешность измерения.
• Практически используется математическая модель объекта измерения,
представляющая совокупность математических зависимостей между параметром,
выбранным в качестве характеристики объекта (откликом), и значимо влияющими на
его величину «существенными» параметрами (факторами).
Эти зависимости представляются алгебраическими и/или дифференциальными
уравнениями, переходными и передаточными функциями.
Для получения оценок качества измерения и определения требований к
измерительной аппаратуре применяются различные модели измерительного процесса,
из которых наиболее используемыми являются классическая (каноническая) и
вероятностная.
Классическая модель измерительного процесса ( эксперимента) строго определяет
условия его проведения. Она используется в метрологии при следующих ограничениях:
1.
Измеряемая физическая величина на протяжении всего цикла измерения
сохраняет неизменным свое истинное значение, которое характеризуется одним
действительным значением, располагаемым внутри доверительного интервала;
2.
Время измерения не ограничено, т. е. сравнение с мерой может происходить как
угодно долго;
3.
Внешние условия и влияющие на результат измерения факторы точно
определены.
90.
Так как практические задачи измерений отличаются от идеализированногометрологического эксперимента сравнения с мерой, а качество измерений оценивается
при помощи статистических методов, то используется другая модель процесса.
Вероятностная (информационная) модель измерительного процесса
принимается при следующих допущениях:
1. Измеряемая величина рассматривается как случайная величина, содержащая
необходимую информацию. Для описания этой величины используется случайная
последовательность ее действительных значений или же обобщенные соответствующие
характеристики этой последовательности:
а) математическое ожидание,
б) дисперсия
в) и другие значимые статистические моменты.
Ее истинное (мгновенное) значение остается неопределенным на этом этапе;
2. Измерение, в общем случае, рассматривается как последовательность операций,
время выполнения которых ограничено, сравнение с мерой исключено;
3. Характеристики измерительного устройства могут изменяться во времени под
влиянием внешних факторов, переменных по своей природе. Эти изменения
рассматриваются как случайные процессы, влияющие на конечную неопределенность
результата измерения.
Очевидно, что классическая модель является частным случаем вероятностной
модели, используемой для динамических измерений.
91. Случайные погрешности.
• Поскольку измеряемый параметр (отклик) исследуемого объекта рассматривается какслучайная величина, то погрешности, возникающие при измерениях, также являются
случайными величинами.
• Природа и физическая сущность случайных и систематических составляющих
погрешности различны.
• Однако в современной практике при оценке как систематических (не исключенных
остатков), так и случайных погрешностей, определенный статистический материал,
представляющий совокупность результатов измерений, обрабатывается на основе комплекса
принятых для этих условий правил.
• В общем случае эти погрешности рассматриваются как случайные величины, хотя
природа «случайности» у них различна.
• Случайные погрешности при измерениях возникают от воздействия на измеритель
большого числа не учитываемых факторов, наличия переменных электрических и магнитных
полей, трения в механизмах, взаимного влияния параметров объекта, изменений внешней
среды и условий измерения и др.
• «Случайность» систематических погрешностей – это результат незнания или
невозможности определения параметров измерителя с требуемой точностью. Такие
величины легко перевести в разряд случайных, используя рандомизацию.
• Поэтому можно считать, что вероятностно – статистические модели, разработанные для
случайных величин справедливы, как для случайных и не исключенных систематических
погрешностей, так и для суммарной погрешности измерений.
• Таким образом, можно считать, что теория погрешностей основана на использовании
математического аппарата теории вероятностей.
• Практически установлено, что в реальных условиях
• погрешности измерений являются ограниченными и непрерывными случайными
величинами.
92.
1. Основные понятия о случайных величинах.Случайная величина – это переменная величина, принимающая при одинаковых
условиях испытаний в зависимости от случая различные значения с определенной
вероятностью.
Чтобы охарактеризовать случайную величину необходимо задать
• 1. область ее возможных значений
и
• 2. способ количественного определения вероятности попадания случайной
величины в любую произвольную часть этой области.
• В зависимости от характера определения области возможных значений
случайной величины последняя может быть
•а) ограниченной, т.е. иметь предельные значения сверху и снизу, или
неограниченной;
•б) дискретной или непрерывной.
• Важнейшей характеристикой случайной величины является ее распределение
вероятностей, которым определяется вероятность появления ее конкретного
значения.
• Для погрешностей измерений, представляемых случайными величинами ,
определение вероятности попадания в произвольные участки области их
возможных значений задается при помощи соответствующих функций
распределения.
93.
a). Функции распределения.Обозначим Xi элемент исследуемой случайной величины X, предполагая ее заданной
в области ее возможных значений. Количественное значение величины Xi – обозначим xi.
• Распределение вероятностей действительной случайной величины
X (X1, X2,…, Xn ) ,
• возможные значения которой x1 , x2 , …, xn образуют конечную или бесконечную
совокупность, называемую генеральной совокупностью, представляется соотношением,
содержащим все значения xi ( i = 1, 2,…,n ) и соответствующие им вероятности P ( Xi = xi ).
• Соотношение может быть представлено таблицей, графиком или функциональной
зависимостью, называемой функцией распределения.
Функция распределения
F (x) = P { X ≤ x }
• определяет вероятность P наличия в области ее возможных значений элементов
случайной величины X меньших значения x.
94.
б). Свойства функции распределения.1. Функция распределения неотрицательна: F ( x ) ≥ 0.
2. Функция распределения изменяется от нуля до единицы:
F ( -∞ ) = 0;
0 < F ( x ) < 1 при ( -∞ < x < ∞ );
F ( ∞ ) =1.
3. Функция распределения неубывающая функция:
F ( x1 ) ≤ F ( x2 ), если x1 < x2.
4. Для функции распределения справедливо:
P { x1 ≤ X ≤ x2 } = F ( x2 ) – F ( x1 ).
в). Дискретные случайные величины.
Действительная случайная величина X ( X1 , X2 ,…, Xn ) называется дискретной,
если вероятности P ( Xi = xi ) отличны от нуля только для счетного множества
значений:
x1 , x2 , …, xn .
Дискретное распределение вероятностей считается теоретически заданным, если
известны все возможные значения x1 , x2 , …, xn , принимаемые случайной величиной,
и вероятности P ( xi ) для каждого события Xi = xi . принимают конечное или счетное
множество различных значений xi c вероятностями Pi.
Функция распределения дискретной случайной величины имеет вид:
Для нее всегда справедливо
F (nx) P( X i x) P( X i )
Xi x
Р ( xi ) 1
i 1
95.
Непрерывные случайные величины• Действительная случайная величина X ( X1 , X2 ,…, Xn ) называется
непрерывной, если ее функция распределения
F (x) = P { X ≤ x }
является непрерывной и имеет непрерывную или кусочно – непрерывную
производную.
• Производная, называемая плотностью распределения вероятностей,
определяется по формуле:
dF
P( x X x x)
f ( x)
и для нее справедливо:
dx
lim
x 0
f ( x) 0
x
f ( x)dx 1;
• Практически, в реальных условиях погрешности измерений являются
ограниченными и непрерывными случайными величинами.
• Распределения непрерывных случайных величин представляются
аналитическими зависимостями, содержащими параметры, определяющие их
индивидуальные свойства. Эти параметры принято называть числовыми
характеристиками распределений. Например, нормальное распределение
имеет
2
( x 1 )
вид:
x
x
2 2
1
F ( x) f ( x)dx
2
dx
96. Основные числовые характеристики случайных величин.
• Числовые характеристики случайных величин, определены с использованием понятия математического ожидания(среднего значения) функций рассматриваемой случайной величины. Если X, случайная величина, то произвольная
функция от нее g ( X ) также является случайной величиной. Ее математическое ожидание
для дискретных величин;
g ( X ) P ( X )
x
M {g ( X )}
g ( X ) f ( X ) dX для непрерывных величин.
это результат ее вероятностного усреднения, т. е. усреднения с весом, равным плотности вероятности f ( X) для
непрерывных величин или вероятности появления величины X со значением x.
Символ
g ( X )обозначает сумму значений g( X ) по всем дискретным значениям x.
x
• В соответствии с этим, основные характеристики случайных величин – их начальные и центральные моменты,
представляются следующими формулами.
• Начальные моменты порядка r ( r = 1,2,…, ), обозначаемые ξr
r
X f ( x)dX
M ( X r )
x r p( x)
x
для непрерывных случайных величин
для дискретных случайных величин.
• Центральные моменты порядка r, обозначаемые μr
r
[
X
M
(
X
)]
f ( X )dXдля непрерывных случайных величин
M {[ X M ( X )]r }
[ X M ( X )]r P( X )
для дискретных случайных величин.
x
97.
Очевидно, что начальный момент первого порядка ξ1 – это математическое ожидание M ( X )случайной величины X - характеристики, определяющей центр распределения,
X f ( X )dX
M ( X )
X P( X )
x
для непрерывных случайных величин;
для дискретных случайных величин;
•а центральный момент второго порядка μ2– это дисперсия σ2 - случайная величина,
характеризующая усредненное рассеивание случайной величины относительно ее математического
ожидания.
[ X M ( X )]2 P( X )
для дискретных случайных величин;
x
D( X ) 2
[ X M ( X )]2 f ( X ) dX
для непрерывных случайных величин.
• Моменты порядка r > 2 используются для определения коэффициентов формы функций
распределения непрерывных случайных величин: коэффициентов асимметрии и эксцесса.
3
• Коэффициент асимметрии
с
( 2 )3 2
E
Коэффициент эксцесса.
4
( 2 )2
Практически, в реальных условиях, погрешности измерений чаще всего являются
ограниченными и непрерывными случайными величинами, имеющими нормальное распределение.
плотность распределения которого представляется соотношением
( x )
f ( x)
1
1
2
2
2
98.
Нормальное распределение.Нормальное распределение широко используется в практических работах вследствие своих
особенностей. Теоретическое объяснение факту описания большого числа случайных величин
нормальным распределением дается центральной предельной теоремой, в которой утверждается, что
если случайная величина X определяется суммой большого числа взаимно независимых случайных
воздействий, и влияние каждого из них на величину их суммы ничтожно мало, то X имеет
распределение близкое к нормальному. Как отмечалось выше погрешности вполне отвечают условию
предельной теоремы.
Распределение вероятностей случайной величины X называется нормальным, если его плотность
( x 1 ) 2
распределения представляется соотношением
f ( x)
1
2
2 2
для любого значения ( - ∞ < x < ∞ ), в котором ξ1 и σ2 – параметры распределения, соответственно
математическое ожидание и дисперсия. Величина σ называется средним квадратичным отклонением.
( x 1 ) 2
Интегральная функция нормального распределения имеет вид
x
F ( x) f ( x)dx
1
x
2
2 2
dx
и при любом X, каковы бы не были параметры, ее значение не превышает единицы.
Вероятность расположения элементов случайной величины X в интервале2 ( X1,X2 ) определяется
x2
( x 1 )
соотношением
1
2
P( x1 X x2 ) F ( x2 ) F ( x1 )
2 x1
2
dx
99.
Графики нормального распределения и его плотности при различных значениях параметров приведены на рис 4.x 4 3.9 8
f ( x)
( x 1)
1
0.30
f ( x)
f1( x)
( x 2)
2 2
e
2 2
2
f1( x)
1
2 2
2
F( x)
2 4
e
0.3
6
0.83
0.2
0.67
F ( x)
0.05
0
0.5
0.33
0.17
0
4
4
Рис 4.
1
0.25
0.1
1.35 10
f ( x) d x
3
0.998
0.15
x
2
0
(а)
2
x
4
6
8
8
0
5
2.5
4
(б)
0
2.5
x
5
7.5
10
8
(а) Плотность нормального распределения; (б) Функция нормального распределения .
График плотности нормального распределения представляется кривой, симметричной
относительно ординаты, соответствующей x = ξ1, и имеет в этой точке максимум, равный 1 2 .
• При x = ξ1 ± σ кривая имеет точки перегиба.
Изменение значения ξ1 сопровождается сдвигом графика по оси абсцисс, но не влияет на его форму. С
возрастанием σ убывает высота кривой, и она становится более пологой и менее островершинной.
Для нормального распределения справедливо правило трех сигм, в соответствии с которым можно
пренебрегать значениями X, отклонения которых от ξ1 превышают 3σ, поскольку вероятность их
появления не превышает 0.003.
• У нормального распределения мода и медиана совпадают с математическим ожиданием;
коэффициенты асимметрии и эксцесса равны нулю, вероятное отклонение равно 0.6744 σ.
• Интегральная функция нормального распределения для ξ1 = 1, σ2 = 2 приведена на рис. 4 (б).
В практике чаще используется нормированное ( стандартизованное ) нормальное распределение.
100.
• Нормированное ( стандартизованное ) нормальное распределение получается из обычного при( x 1 )
помощи линейного преобразования
Z
Оно имеет математическое ожидание, равное нулю, и среднее квадратичное отклонение равное
единице. Плотность вероятностей и интегральная функция распределения представляются формулами
x
2
1 z2
( z)
2
F0 ( x)
2
z
1
2 dz
2
• Графики нормированного нормального распределения и его плотности случайной величины X
приведены на рис 5
1
0.41
0.41
0.83
0.34
0.67
0.27
f ( x)
F ( x)
0.2
0.33
0.14
0.17
0.068
4.432 10
3
0
0.5
0
4
3
2
1
0
1
2
3
4
Рис.5.
x
3
x
3
• Вероятность попадания
нормированной
нормальной случайной величины X в интервал ( 0;X )
можно вычислить, используя функцию Лапласа
x
z2
1
( x)
2 dz
2 0
• В этом случае функция нормированного нормального распределения определится по формулам
4
3
2
1
0
1
2
3
4
F0 ( x) 0.5 ( x)
F0 ( x) 0.5 ( x)
• Тогда вероятность попадания нормированной нормальной случайной величины X в интервал ( X1 ,
X2 ),
P( x1 X x2 ) F0 ( x2 ) F0 ( x1 ) ( x2 ) ( x1 )
101.
Выборочные значения.• Приведенные выше для описании случайных величин формулы характеризуют
генеральные совокупности рассматриваемых случайных величин.
• Предполагается что генеральная совокупность непрерывной погрешности X содержит
все значения, принадлежащие интервалу ( -∞,∞ ). При практических измерениях
определяется только счетное количество значений xi ( I = 1.2….n ) из этого интервала.
• Эти регистрируемые значения xi ( I = 1.2….n ) представляют набор дискретных
значений случайной величины X(X1,…, Xn) , и образуют совокупность элементов этой
случайной величины, имеющую распределение вероятностей, с соответствующими
числовыми характеристиками и называются выборкой.
• Если они являются взаимно независимыми одинаково распределенными случайными
величинами, выбранными из генеральной совокупности с распределением F(x), то
совокупность их значений называется простой случайной выборкой, и ее характеристики
являются оценками соответствующих числовых характеристик генеральной совокупности.
• Значения простой случайной выборки xi ( I = 1.2….n ) используются для определения
оценок моментов генеральной совокупности, в частности, для вычисления значений
среднего арифметического x , являющегося оценкой математического ожидания M ( X ) , и
2
выборочной дисперсии S – оценки дисперсии σ2. В дальнейшем они будут обозначаться
буквами латинского шрифта.
• Эти оценки должны быть состоятельными, несмещенными и эффективными. Для их
вычисления, производится суммирование и осреднение значений. Получаемые таким
образом оценки ˆ( x1 , x2 ,..., xn ) называются точечными. Они выражаются одним числом
и, естественно, отличаются от истинных значений
.
102.
1. В частности, для вычисления точечных оценок среднего арифметического x и выборочнойдисперсии S 2 используются следующие формулы:
1 n
• Среднее арифметическое
x
x
n
i 1
i
В качестве характеристики положения центра распределения помимо среднего
арифметического могут быть использованы:
Мода – значение элемента выборки, соответствующего наибольшей плотности вероятностей;
Медиана - значение элемента, соответствующего середине выборки; при нечетном n = 2k + 1 его
номер k = 0.5( n-1 ); при четном n = 2k его номер k = 0.5 (xk + xr+1)
Выборочная дисперсия
1 n
S 02
2
(
x
x
)
i
n i 1
Выборочная дисперсия, вычисляемая по приведенной формуле является смещенной оценкой
дисперсии. Смещение устраняется, если используется формула
1 n
S
( xi x ) 2
n 1 i 1
2
x
Оценка S 2 является асимптотически несмещенной. Оценки
и S 2 являются состоятельными,
асимптотически несмещенными и эффективными оценками, если выборка сделана из
совокупности, имеющей нормальное распределение.
В практике для характеристики рассеяния случайных величин часто применяются другие
оценки:
средне – квадратичное отклонение S СКО) , равное корню квадратному из несмещенной
дисперсии
1 n
S
( xi x ) 2
n 1 i 1
103.
Коэффициент вариации, характеризующий относительную погрешность и равный
отношению
средне – квадратичного отклонения к среднему арифметическому
S
V 100%
x
2
• Характеристики x и S по построению являются случайными величинами и их рассеяние
определяется соответствующими дисперсиями :
2 2
S2
;
D( x )
n
D( S 2 )
m4 ( S )
(2S ) 2 n
•где m4 – выборочный момент четвертого порядка,
вычисляемый по формуле
n
m4
1
( xi x ) 4
n i 1
За меру близости оценки к истинному значению определяемого параметр а обычно
принимается величина среднего квадрата ошибки.
Оценка â(x1, x2,… ,xn) является несмещенной оценкой для неизвестного параметра а, если
при любых допустимых значениях параметра а математическое ожидание
M {â (x1, x2,… ,xn)} = a ,
• или иначе, при любом объеме выборки n результаты ее осреднения по всем возможным
выборкам данного объема приводят к точному истинному значению оцениваемого параметра,
т. е. M{â}=a .
Оценка неизвестного параметра â называется состоятельной, если по мере роста объема
выборки (то есть при n ) она стремится по вероятности к истинному значению a или, если
для любого сколь угодно малого 0 вероятность
P{|â – a| >ε} 0
стремится к нулю при n ..
Оценка параметра называется эффективной, если она среди всех прочих оценок этого
параметра обладает наименьшей мерой случайного разброса относительно истинного
значения оцениваемого параметра ( т. е. наименьшей дисперсией).
104.
Доверительные интервалы.• Точечные оценки параметров генеральной совокупности, вычисляемые по результатам
выборки, не содержат информации о степени близости полученной оценки истинному
значению параметра.
• Чтобы получить представление о точности и надежности полученной оценки
используется более информативный способ оценивания неизвестных параметров,
состоящий в построении интервала, в котором с заданной степенью достоверности
находится оцениваемый параметр. Этот интервал называется доверительным и считается
интервальной оценкой определяемого параметра. При небольшом объёме выборки такая
оценка предпочтительнее точечной.
• Если по выборке определена оценка ˆпараметра , то очевидно, что она будет тем
точнее, чем меньше величина | ˆ . |Поскольку эта разность - случайная величина, то ее
значение определяется вероятностью события | ˆ | , где :
0
P{| ˆ | }
где - значение вероятности события.
• Полученное соотношение можно записать в виде
P( ˆ ˆ ) 1 ,
где - величина, называемая уровнем значимости, а значения ( ˆ , ) ( ˆ ),
рассматривать как границы интервала, в котором с вероятностью
заключено истинное значение определяемого параметра .
• Эти границы являются случайными величинами и называются доверительными
границами, а вероятность накрытия доверительным интервалом истинного значения
неизвестного параметра равна 1- α, является доверительной вероятностью.
105.
Интервальной оценкой параметра называется интервал, границыкоторого являются функциями выборочных значений x1 , x2 ,..., xn и который с
заданной вероятностью накрывает значение определяемого неизвестного
параметра .
Если ввести функции выборки ˆв ( X n ), ˆн ( X n ) (выборочные значения
параметра ), построенные так, что для, что при любом значении ,
выполняются соотношения
P{ ˆн ( X n ) ˆв ( X n )}
(1)
то интервал ˆн ( X n ), ˆв ( X n ) называется доверительным, а его границы
соответственно нижним и верхним пределами.
Соотношение (1) утверждает, что вероятность накрытия доверительным
интервалом истинного значения неизвестного параметра равна 1- α. Она
является доверительной вероятностью, а α называется уровнем значимости.
• Выбор доверительной вероятности P = 1- α производится исследователем
исходя из предположения, что событие, вероятность осуществления которого
близка к единице, является в единичном испытании практически достоверным.
• Практически чаще всего используется = 0.95, реже 0.99; 0.90 и др.
• Если бы функция распределения величины | ( ˆ) |
была известна, то
используя соотношение ( 1 ) для заданного α можно было бы определить
величину δ. В общем случае эта функция неизвестна.
106.
Поэтому для построения интервальных статистических оценок параметров
нормально распределенной генеральной совокупности X c математическим
ожиданием ξ1 и дисперсией σ2 используются приведенные ниже выборочные
распределения статистик, справедливые для любой выборки объема n.
x 1
/ n
- имеет нормированное нормальное распределение;
x 1
S/ n
- имеет распределение Стьюдента с (n-1) степенью свободы;
(n 1) S 2 1 n
2 ( xi x ) 2
2
i 1
x 1
x 1
S
- имеет χ2 - распределение с (n-1) степенью свободы;
- имеет нормированное нормальное распределение;
- имеет распределение Стьюдента с (n-1) степенью свободы;
1 n
2
(
x
)
i 1
2 i 1
- имеет χ2 - распределение с n степенями свободы
В приведенных формулах
дисперсия.
x - выборочное среднее; S2 – несмещенная выборочная
107.
Процедура построения интервальной оценки.1. По полученным в эксперименте выборочным значениям xi ( I = 1,2,…,n ) вычисляется
точечная оценка определяемого параметра θ;
Из приведенных выше статистик выбирается та
f ( , ˆ)
определяемый параметр и его оценку;
2
, которая содержит
3. Из стандартных значений 0.9; 0.95; 0.99 и др. выбирается требуемое по заданию
значение доверительной вероятности P = 1 – α (0.95,…,0.99) или уровня значимости α:
0.01,…,0.10.
4. Для выбранного уровня значимости определяется доверительная область выбранной
функции f ( , ˆ) . Записывается неравенство, которым определяется вероятность
размещения этой функции в границах доверительной области, определяемой по
распределению плотности вероятностей этой функции;
5. Неравенство преобразуется так, чтобы были выделены верхний и нижний
доверительные пределы.
108.
Пример.Требуется найти с доверительной вероятностью P=0.95 интервальные
оценки математического ожидания x и дисперсии σ2 генеральной совокупности роста
200 студентов первого курса. Предполагается, что распределение по росту является
нормальным.
Для решения задачи производится выборка. Измеряется рост группы студентов
первого курса, состоящей из 20 человек. Результаты представлены в таблице ( i=1,2,…,7).
Xi см.
1.61
164
167
170
173
176
179
ni
1
2
4
6
4
2
1
После обработки этих данных получено:
а) средний рост (среднее арифметическое выборки)
1 7
= 1.700 м ;
x ni xi
n i 1
б) несмещенная выборочная дисперсия полученных результатов
1 7
S
ni ( xi x ) 2 = 0.002 м2
n 1 i 1
2
109.
Решение. а). Определение интервальной оценки математического ожидания 1 .1.
Точечные оценки определяемых параметров вычислены по данным,
приведенным в таблице
S2 = 0.002 м2.
x = 1.700;
Необходимо найти такие граничные значения, при которых с вероятностью P = 0.95
будет выполнено условие (1.)
P{ x 1 } 0.95 1
2. В этом случае, когда неизвестно математическое ожидание и дисперсия, для
отыскания доверительного интервала используется статистика
t ( x 1 ) ( S / n )
содержащая разность истинного значения и его оценки. Эта переменная имеет
распределение Стьюдента с
( = עn-1)
степенями свободы.
Доверительная вероятность по условию равна 0.95,
количество наблюдений n=20.
График плотности распределения Стьюдента представлен на рис. 6.
110.
0.450.36
f ( t)
0.27
( t ) 0.18
0.09
0
4
3
2
t 2
1
0
t
1
2
t 2
3
4
Рис.6. Распределение плотности вероятностей для = ע19.
( t 2 ; t 2 ) , для которой выполняется условие (1),
На графике доверительная область
ограничена заштрихованными участками, границы которых слева и справа соответствуют
x 1
значениям области определения статистики
S/ n
•Заштрихованные участки графика, находящиеся слева и справа от доверительной области,
соответствуют принятому уровню значимости и определяют значения t, соответствующие этому
значению. Вероятность попадания t, в каждый из них равна α/2.
• Условие (1) записывается в виде
( x 1 ) n 1
t 2 ( )} 1 0.95
S
( x 1 ) n 1
Неравенство, находящееся под знаком вероятности
t 2 ( )
t 2 ( )
P{ t 2 ( )
S
•используется для построения доверительного интервала. Для этого оно преобразуется так, чтобы
истинное значение параметра ξ1, было выделено выражениями, которые
•определяют границы доверительного интервала.
x
S
S
t 2 ( ) 1 x
t 2 ( )
n 1
n 1
111.
• Тогда доверительный интервал определится соотношениями:2S
t 2 ( )
и имеет ширину
n 1
[x
S
S
t 2 ( ); x
t 2 ( )]
n 1
n 1
• Значения
t 2 ( ) t0.025 (19) 2.09 извлекаются из таблиц распределения Стьюдента по
известным значениям вероятности α/2 = 0.025 и числу степеней свободы = ע19.
x n,
• Подставляя значения
,
доверительный интервал
S , в последнее соотношение получим 1.675 ≤ ξ1 ≤ 1.721 и
[1.675 ; 1.721]
• Определение интервальной оценки дисперсии σ2.
В этом случае для построения доверительного интервала используется статистика
(n 1)S 2
V
2
2
–
имеющая χ распределение с n – 1 степенями свободы.
Доверительная вероятность принимается , как и ранее, P=0.95.
Для выбранного уровня доверительной вероятности 1-α = 0.95 можно построить
бесконечное множество интервалов, выбирая соответствующим образом их границы и
меняя расположение границ.
• При решении подобных задач наиболее удобными и информативными являются
двусторонние интервалы с одинаковыми критическими областями.
2
112.
Выберем для рассматриваемой задачи доверительный интервал, в который свероятностью P = 1-α = 0.95 попадет значение V2 так, чтобы вероятности выхода из него
влево и вправо были одинаковы и каждая равна 0.025.
График χ2 – распределения при значениях параметров рассматриваемой задачи
приведен на рис. 7.
0.07
0.06
0.05
f ( x)
0.04
( x) 0.03
0.02
0.01
0 0
0.07
0
0
4
8
χ12
12
16
20
x
24
28
32
χ2 2
36
40
40
Рис.7. График χ2 – распределения. ( n-1)= 19; α/2 =0.025.
На графике x 2 и соответственно границы интервала обозначены 2 и 22 . Тогда
2 1
2
2
2
2
справедливо
и
P
(
2) 2
P( ) 1 P( ) 2
1
1
2
На рис. 7 – это заштрихованные области: первая слева, вторая справа. С учетом этих соотношений
(n 1)S 2
2
2
2
2
2
P(
)
1
P
(
)
P
(
2
1
2 ) 1 .
2
2
1
Преобразуя неравенство под знаком вероятности для выделения отыскиваемого параметра,
2
2
получим
P
(n 1)S
(n 1)S
2
1 .
2
2
2
2
113.
Следовательно, доверительный интервал для σ2 определится выражением(n 1) S 2 (n 1) S 2
;
2
2
2
1
И имеет ширину
22
Значения 2 и
1
Для
Для
P(
2
(n 1) S 2 ( 22 12 )
2 2
2 1
определяются из таблиц χ2 – распределения:
) / 2 и, следовательно,
2
2
22 (0.025;19) 32.9 ;
:
P( 2 12 ) 1 / 2
12 (0.975;19) 8.9
Подставляя эти значения и значения параметров задачи в последнее
соотношение получим доверительный интервал:
[0.00115; 0.00427]
114.
Домашнее задание.Пример. При проведении эксперимента были получены значения измеряемой
величины X, приведенные в таблице.
xi
35.6
35.9
36.1
36.2
36.6
n
1
3
3
2
1
N=10
Определить.
Среднее арифметическое.
Доверительную вероятность принять равной 0.95.
Несмещенную дисперсию и среднее квадратичное отклонение.
Полагая распределение измеренных значений нормальным, вычислить
доверительный интервал ( интервальную оценку ) математического
ожидания и дисперсии.
Для вычислений использовать представленные в презентации статистики;
распределение используемой статистики и соответствующие граничные
значения получить из системы Mathcad.
115.
• Прямые однократные измерения.• При однократном измерении случайной величины X получается единственный
результат х. Это одно из значений случайной величины - оценки значения измеряемой
физической величины - с неизвестной вероятностью появления. Оно принимается за
окончательный результат измерения физической величины.
• Являясь случайным, однократный отсчет х включает в себя инструментальную,
методическую и субъективную составляющие погрешности измерения, в каждой из
которых могут быть выделены систематические и случайные составляющие. Поэтому до
измерения должна быть проведена априорная оценка составляющих погрешности с
использованием всех доступных данных. При определении доверительных границ
погрешности результата измерений доверительная вероятность принимается, как правило,
равной 0,95.
• Инструментальная погрешность СИ ∆и, представляет сумму погрешностей: основной ∆ос,
дополнительной ∆доп , динамической ∆дин, возникающей при исследовании изменяющихся
во времени величин, и методической погрешности ∆вз, проявляющейся при проведении
вычислений по принятым алгоритмам, а также погрешности, вызванной изменением
значения измеряемой величины за счет присоединения СИ.
• Значение основной ∆ос (систематической погрешности СИ), как правило, неизвестно. В
паспорте СИ указывается предел погрешности ∆ос, означающий максимально возможную
погрешность ∆си при рекомендованных значениях влияющих факторов: температуре и
влажности среды, в которой производятся измерения, частоте и напряжении питающей
прибор электрической сети, наличии электрических и магнитных полей, вибраций и др. Это
значение называется основной погрешностью СИ.
116.
• Дополнительная погрешность ∆доп возникает при измерении вследствиеотклонения значений влияющих факторов: температуры, влажности воздуха,
магнитного поля и др., от их нормальных значений. Наличие и величина
дополнительных погрешностей определяется до опыта.
• Оценка погрешности полученного результата для статических измерений
производится на основе сведений о пределе допускаемой основной погрешности
∆ос, вычисляемых значений дополнительных погрешностей, возникающих от
влияющих факторов - ∆доп и методической погрешности от взаимодействия СИ
и объекта - ∆вз.
• Как правило, методические погрешности вычислений и алгоритмов, а также
субъективные погрешности при однократных измерениях не учитываются.
Суммарная погрешность измерения представляется, как сумма модулей этих
составляющих:
u си доп вз
• или в виде их статистической суммы:
m
2
k
i
i 1
• где k – коэффициент, значение которого определяется принятой
доверительной вероятностью P (при P = 0.95, k=1.11), m – число учитываемых
составляющих погрешностей,
117. . Обработка результатов прямых многократных равноточных измерений
• При прямых многократных равноточных измерениях за оценку измеряемойфизической величины
принимается
X среднее арифметическое результатов
наблюдений:
, которое определяется как центр распределения и вычисляется
по формуле
1 n
x
xi
x
n i 1
• где n - число наблюдений.
• Эта точечная оценка является несмещенной, состоятельной и эффективной. по
мере роста количества измерений она стремится по вероятности к истинному
значению и, обладает наименьшей мерой случайного разброса относительно
этого значения. У нее интервал неопределенности значительно меньше, чем
результат однократного измерения. Ее дисперсия в раз меньше дисперсии
однократного измерения.
• При многократных измерениях уменьшаются только случайная
составляющая погрешности, систематическая - остается без изменения.
• В результатах многократных измерений погрешность представляется суммой
систематической и случайной погрешностей.
118.
Для обработки результатов многократных измерений предлагается следующаяпоследовательность операций
1.- в соответствии с планом эксперимента регистрируются значения равноточных
результатов измерений x , x ,..., x исследуемой физической величины;
;
1 2
N
2.- результаты представляются
в виде
вариационного ряда
x(1) , x( 2) ,... , x( N )
3.- в результатах измерений исключаются известные систематические погрешности;
4.- вычисляется среднее арифметическое полученной выборки
1 N
x0 xi ;
N i
5.- вычисляется выборочное среднеквадратичное
отклонение (СКО)
s0
1 N
2
( xi x0 )
N i 1
6.- анализируются элементы вариационного ряда; выявляются и исключаются грубые
погрешности - «промахи»
7.- при необходимости проверяется гипотеза о том, что оставшиеся результаты
наблюдений принадлежат нормальному распределению ;
Далее рассматривается процедура обработки нормально распределенных
данных.
8.- строится исправленный вариационный ряд
x(1) , x( 2) ,... , x( n )
и вычисляется среднее арифметическое:
n
x
1
xi
n i 1
x0
119.
- это значение x принимается за результат измерения;9- вычисляется среднее квадратичное отклонение (СКО) оценки результата
n
2
измерения
( xi x )
+
S(x)
i 1
n( n 1)
10.- для заданной доверительной вероятности PD 0.95 вычисляются
,а
доверительные
границы случайной составляющей погрешности результата
измерения:
d t ( 2; n 1) S ( x )
;
где t ( 2; n 1) квантиль распределения
: Стьюдента, соответствующий (n-1)
степеням свободы при уровне значимости для симметричной доверительной
области;
11.- вычисляются границы не исключенной систематической погрешности
(неисключенных остатков систематической составляющей погрешности)
результата измерения ;
12.- определяется суммарная погрешность x0 = + d ,
При симметричной доверительной погрешности результаты измерения
представляются в виде:
x x0 ,
P 0.95.
120.
Неравноточные измерения.• В практике измерений часто приходится иметь дело с результатами, полученными в
разных условиях. Такая ситуация возникает тогда, когда необходимо использовать
результаты измерений одной и той же физической величины, полученные в разное
время, в разных лабораториях, приборами разных классов точности, исследователями
различной квалификации.
• В этом случае, исследователь рассматривает n совокупностей результатов измерений,
каждая из которых содержит mi
(i 1,2,...k ; k 4,5,...) значений.
• В общем случае значения оценок математического ожидания и дисперсии в
совокупностях - различны.
• Для получения оценки математического ожидания 0 и дисперсии S 02 общего
результата измерений, вычисленного по всем неравноточным измерениям, необходимо
• а) определить однородность результатов измерений выборок, то есть их
принадлежность к одной генеральной совокупности;
• б) при вычислениях учитывать величину вклада каждой выборки.
• Если все выборочные данные являются случайными величинами с нормальным
распределением, то оценками параметров функций распределения каждой совокупности
2
являются средние арифметические i и выборочные дисперсии S i (i =1, 2,…, n).
• Для проверки однородности результатов измерений разных выборок применяется
процедура проверки однородности дисперсий этих выборок. В качестве критерия
используется F – критерий, представляемый отношением дисперсий и имеющий
распределение Фишера – Снедекора (Рис.8) .
121.
1.21.2
1.1
1
0.9
0.8
( y )
1( y )
2( y )
3( y )
0
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
0
0
0.5
1
1.5
2
2.5
3
3.5
4
y
4.5
5
5
Рис. 8. Графики плотности распределения Фишера - Снедекора
Графики, соответствующие различным значениям сочетаний степеней свободы ( 1 и
2 ), построены в декартовой системе координат, начало которой совмещено с нулем
функции и аргумента: по оси абсцисс отложены значения
• F =y; по оси ординат – значения плотности распределения. (y) – соответствует (ν1= 6,
ν2= 6 ); 1(y) – ( 6, 24 ); 2(y) – (18, 18); 3(y) – (30, 30 ).
• Для проверки однородности из рассматриваемых выборок выбираются
• дисперсии: наибольшая S а2 max Si2 с a ma 1 и наименьшая S 2 min S 2 с
b
i
b mb 1
.
• Строится статистика, определяющая отношение большей диспрсии к меньшей
имеющая распределение Фишера - Снедекора.
S a2
Fk 2
Sb
122.
а в (исследуемые дисперсии однородны),Проверяется гипотеза H0:
при альтернативной гипотезе H1:
а.2 в2
• Задается уровень значимости α (или доверительная вероятность γ = 1- α) и определяется
квантиль распределения Фишера – Снедекора F ( , a , b )
для соответствующих степеней
свободы и заданной доверительной вероятности. Если при сравнении окажется
Fn F ( , a , b ) ,
Fn F ( , a , b ) , то предположение
• то принимается гипотеза H0. В противном случае, если
об однородности дисперсий выборок отвергается.
• Если подтверждена гипотеза однородности результатов измерений, то определяется оценка
значения измеряемой физической величины 0 . Она вычисляется как взвешенная сумма
оценок математических ожиданий выборок. Для результатов измерений, имеющих нормальное
распределение, – это взвешенная сумма средних арифметических.
1P1 2 P2 ... n Pn
0
P1 P2 ... Pn
• Для определения погрешности и доверительного интервала измеряемой величины,
2
вычисляется общая дисперсия S 0 , характеризующая рассеяние значений результатов измерений,
относительно оценки значения измеряемой физической величины 0 . Общая дисперсия
определяется как сумма внутригрупповых и межгрупповых выборочных дисперсий.
• Внутригрупповая дисперсия – это среднее арифметическое выборочных дисперсий,
взвешенное по объемам выборок
n
n
,
1
2
2
M mi
S
m
S
BГ
i
i
• где
i 1
M
2
2
i 1
.
123.
• Межгрупповая дисперсия – это дисперсия выборочных средних относительно общейi
2
средней 0 .
n
1
2
S MГ
mi ( i 0 ) .
M i 1
S0 S BГ S MГ
• Общая несмещенная выборочная дисперсия:
2
2
• Соответствующее среднее квадратичное отклонение
S0 S BГ
S MГ
• Для построения доверительного интервала задается уровень значимости (доверительная
вероятность ( 1 ) и определяется соответствующая статистика. В рассматриваемом
случае такая статистика имеет вид
0
t
• ,
S0 / M 1
• где - математическое ожидание измеряемой случайной величины, имеющей
нормальное распределение.
• Случайная величина
имеет распределение Стьюдента с
M 1 степенями
свободы. Границы доверительного интервала определяются неравенством:
P( t t 2 ),
• где t 2 ( )- квантиль распределения Стьюдента.
• Это неравенство определяет интервал, в котором с вероятностью
располагается
случайная величина t ( ) с M 1 степенями свободы. Если в неравенство подставить
значение , то оно примет вид
2
t
t
.
..
P( t 2
2
( 0 ) M
t 2 )
S0
2
124.
Отсюда следует, что неравенствоt 2
.
выполняется с вероятностью
( 0 ) M
t 2
S0
Полученное неравенство преобразуется к виду
0
S0t 2
M
0
S0t 2
M
где левая и правая части неравенства определяют, соответственно, нижнюю и верхнюю границу
доверительного интервала.
Очевидно, что ширина интервала d c вероятностью
равна:
S0t 2
d 2
M .
Замечание. В общем случае, для проверки однородности распределений выборок,
используются критерии: Вилкоксона – Манна – Уитни, Смирнова –
Колмогорова и др. Если известен вид функции распределения сравниваемых
групп, то для проверки их однородности можно использовать:
параметрический Т- критерий проверки математических ожиданий,
имеющий распределение Стьюдента, и параметрический критерий проверки
однородности дисперсий - F – критерий, имеющий распределение Фишера Снедекора.
125.
Пример . В двух лабораториях производились измерения одного и того же объекта. Результатыизмерений приведены в таблице, где строка с
лаборатории, а X2i и n2i – второй
X1i и n1i
соответствует испытаниям первой
X1i
95
98
102
104
108
112
n1i
2
4
7
7
6
4
X2i
89
92
97
101
104
111
n2i
2
3
5
5
3
2
Используя эти результаты определить:
1.Выборочные дисперсии измерений, полученных в каждой лаборатории,
2.Проверить их однородность и сделать заключение о том, что полученные выборочные дисперсии
являются оценками общей дисперсии.
3.Вычислить общие: среднее арифметическое и выборочную дисперсию и соответствующее
среднее квадратичное отклонение.
4. Построить доверительные интервалы для дисперсии и математического ожидания объекта при
доверительной вероятности P = 0.95
Ответы.1. Исходные данные:
2
X 1 104.0 ; S1 23.655 ; S1 4.864.
Однородность:
F
3. Общее среднее:
Дисперсии и СКО:
Доверительные интервалы:
2
2
2
1
X 2 97.545 ; S22 40.793 ;
S2 6.387.
S
1.724 ;
F ( P,n2 , n1 ) F (0.95,21,29) 1.932 ;
S
X 0 101.269 ;
Sb2 30.906 ;
99.484 0 103.054;
S m2 10.17;
S 02 41.076; S0 6.409.
28.849 S 02 63.133 .
126.
95 2 89 3 104 97.54598 4 92 5 104 97.545
102
7
97
6
104
97.545
m
104 7 101 3 104 97.545
108 6 104 3 104 97.545
112
4
111
2
104
97.545
S1
T 1
F1 m
29
81
36
4
F1
0
16
64
S1 23.655
Однородность дисперсий
F0
40.793
23.655
X1
0 1
m m
X2
X1 104
30
2 3
m m
X0
X1 30 X2 22
X2 97.545
22
52
X0 101.269
Вычисление дисперсий
5
2
K m m
4
0
F m m
9
6
2
F
0
4
8
Вычисление исходных данных
8.545
5.545
0.545
K
3.455
6.455
13.455
S2
2
B K
73.017
30.747
0.297
B
11.937
41.667
181.037
3
B m
22
S2 40.793
x1 97.545
F0 1.724 qF ( 0.95 21 29) 1.932 F0 qF ( p )
Принимается.
127.
Косвенные измерения.Косвенные измерения применяются если значение измеряемой физической величины
вычисляется по результатам прямых равноточных измерений независимых физических
величин (аргументов) a1, a2, …, am , с которыми она связана известной функциональной
зависимостью
Y=f (a1, a2, …, am).
(1)
Все оценки аргументов определяются с одинаковой доверительной вероятностью. Если
распределения погрешностей аргументов нормальны и независимы, то оценка Y
соответствует принятому значению доверительной вероятности.
Вклад отдельных аргументов в результат значения и его погрешности определяется
видом функции. Но независимо от вида функции при расчете погрешности в алгоритме
вычислений используются коэффициенты влияния аргументов, которые определяются как
частные производные функции по соответствующим аргументам, вычисляемые при
средних арифметических значениях аргументов.
а) Функциональная зависимость линейная:
Y= b1a1 + b2 · a2, + ...+ bm · am ,
(2)
где bi – постоянные коэффициенты. Если все аргументы ai (i = 1, 2, …,m) - случайные
величины с нормальным распределением, то среднее арифметическое значение функции
Y b1a1 b2 a2 ... bm am
где ai среднее арифметическое аргумента, определенное путем прямых измерений. При
расчете погрешности результата косвенных измерений коэффициенты влияния аргументов,
вычисляются как частные производные функции (2) по соответствующим аргументам. В
этом случае, они не зависят от значений аргументов
128.
Если при измерениях аргументов устанавливается, что значение каждого из нихсодержит значимую систематическую погрешность ∆сi , то систематическая погрешность
результата измерений физической величины cY определится по формуле
f
сj
сY
j 1 a j
m
(3)
Если не исключенные систематические погрешности результатов измерений
аргументов заданы доверительными границами Θ i , то доверительные границы не
исключенной систематической погрешности результата косвенного измерения Θ(Y ) (без
учета знака) при вероятности q вычисляютcя по формуле
f 2
j
(Y ) k
j 1 a j
m
(4)
где k - поправочный коэффициент, определяемый принятой доверительной вероятностью
q и числом m. При доверительной вероятности q = 0,95 поправочный коэффициент k
принимаетcя равным 1,1, а при q = 0,99 принимается k = 1,4, если m >4.
Если результаты измерений аргументов ai имеют нормально распределенные
случайные погрешности ai, с математическими ожиданиями равными нулю
M [ ai ] 0, то математическое ожидание погрешности косвенных измерений
случайной величины будет:
m
f
(5)
M { Y }
M [ ai ];
a
i 1
i
129.
В соответствии с теоремой о дисперсии суммы, для линейной функции дисперсияпогрешности определяется формулой
2
m, m
f 2
f f
Y
j 2 jk
j k
j 1 a j
j 1 k 1
a j ak
m
2
n
где
jk
( a ji a j )( aki ak )
i 1
n
- коэффициент корреляции;
( a ji aa j ) 2 ( aki ak ) 2
i 1
ii
2 ai - -i2дисперсии аргументов; ai - среднее арифметическое погрешности
i – го аргумента;
- среднее квадратичное отклонение i – го аргумента; n - число
i
измерений.
Для проверки значимости коэффициента корреляции используется статистика
tb
(n 2) 2jk .
-
(1 2jk )
с распределением Стьюдента. Вычисленное по ней значение сравнивается с квантилем
распределения Стьюдента , соответствующим принятой доверительной вероятности q
и (n-2) степеням свободы. Если t{q, (n 2)} tb , то с вероятностью
q
принимается
jk 0.
130.
Если корреляция между погрешностями a отсутствует, то дисперсия погрешности функцииj2
вычисляется по формуле
m
f
2j
j 1 a j
2 [ Y ]
В дальнейшем эмпирические значения параметров ( оценки) будут обозначаться буквами
латинского алфавита S 2 (a j ) , S ( a j ) . При выполнении указанных выше условий проведения
опытов, дисперсии вычисляются как несмещенные, а оценки будут состоятельными и
эффективными.
Порядок проведения косвенных измерений.
Линейная функция. Измеряемая физическая величина , представляется линейным
соотношением:
Y K1a1 K 2 a2 K3a3
в котором a1 , a2 , a-3 физические величины (аргументы), K j - постоянные коэффициенты.
1. Прямыми измерениями определяются:
-средние арифметические значения величин a ,
j
-- оценки дисперсий 2
2,
S (a ) S j
a j t(1 ) / 2 (n j 1) S j , вычисленные для заданной
- доверительные границыj (погрешности)
доверительной вероятности , где S j S 2j
n .
Если не исключенные систематические погрешности постоянные величины и одинаковы для
всех аргументов, то коэффициентами влияния: являются коэффициенты соотношения.
2. Вычисляются среднее арифметическое : Y K1a1 K 2 a2 K 3 a3 ; и соответствующая
погрешность
.
Y K12 ( a1 )2 K22 ( a2 )2 K32 ( a3 )2
3. Результат измерения представляется в виде:
Y Y Y
,
P ,
131.
2 Для косвенных измерений при нелинейных зависимостяхY=f (a1, a2, …, am )
вычисления производятся после линеаризации функции.
Для степенных функций, представляемых в виде произведения аргументов в
различных степенях, положительных и отрицательных
Y a x a y ,..., a z
применяется метод логарифмирования. После логарифмирования функция становится
линейной относительно логарифмов аргументов. Используя полный дифференциал
такой функции легко вычислить относительную (и абсолютную) погрешность
результатов косвенного измерения, дисперсию и среднеквадратичное отклонение.
h
Пример. Определить объем кругового круглого
конуса.
1
V R 2 h ,
1.Объем кругового круглого конуса вычисляется по формуле
3
где - R радиус основания, h - высота конуса.
2. При помощи микрометра с ценой деления, равной 0.01мм. получено по 10 значений R
и h
При одинаковой доверительной вероятности q=0.95 вычислены значения
R (6,02 0,03) мм ; h (10,14 0.04) мм;
3. Среднее арифметическое значение объема конуса V 3.14 (6.02) 2 10.14 384.63
3
4.Для определения случайной погрешности объема логарифмируется функция:
5.Определяются частные производные.
Вычисляется дифференциал
lnV ln ln h 2 ln R ln 3
dV dh
dR V
V
2
dh
dR
V
h
R
h
R
132.
Следовательно,V 1
h h
V 2
R R
6.Вычисляются относительная и абсолютная случайные погрешности
2
2
2
2
Vx
V
V
0.04 0.03
2
2
0.011 Vx 4.23
Vx V
h
R V
2
V
h
R
10.14 6.02
7.Систематические погрешности аргументов в рассматриваемом случае – погрешности
средства измерения. Их величина равна цене деления шкалы прибора - 0.01мм.
c R
ch
V
V
2
сV 1.02
с
Систематическая погрешность объема
мм3 .
h
R
8.Общая погрешность результата измерения объема V (4.23) 2 (1.02) 2 4.35 мм3 .
9.Результат измерения
V (384.63 4,35) мм3 при q 0.95
Второй метод линеаризации, используемый при нелинейной зависимости Y=f (a1, a2,
…, am ) и некоррелированных погрешностях, построен на предположении, что
нелинейность в малой окрестности факторного пространства а может быть
аппроксимирована линейной функцией. Эта функция определяется из разложения
исследуемой функции в ряд Тейлора.
Если используемая функция Y=f (a1, a2,…, am) непрерывна по всем аргументам и
имеет частные производные всех порядков, то она может быть аппроксимирована
разложением в ряд Тейлора
2
f
1 m f
f (a1 , a2 ,..., am ) f (a1 , a2 ,..., am )
ai
( ai a j ) ....
2 i , j 1 ai a j
i 1 ai
m
133.
где функция и все ее производные по аргументам аi, аj, (i, j 1,2,..., m) вычисляютсяпри средних арифметических значениях аргументов.
Исследуемая функция может быть представлена линейной частью ряда Тейлора,
если остаточным членом ряда R , то есть суммой всех элементов разложения,
содержащих частные производные второго и более высоких порядков, можно
принебречь. При малой нелинейности для оценки остаточного члена R достаточно
оценить сумму значений всех элементов второго порядка 2малости. Тогда
1 m f
R
( a a )
2 i , j 1 ai a j
i
j
В соответствии с МИ 2083 – 90 ГСИ остаточным членом можно принебречь, если
выполняется
m
f 2
R
0
.
8
(
) S 2 (ai )
ai
Результат измерения Y вычисляется по формуле Y f (a , a ,..., a ). Абсолютная
1 2
m
погрешность косвенного измерения, вычисляемая без учета погрешности линеаризации
m
равна
f
f
(
a
,
a
,...,
a
)
f
(
a
,
a
,...,
a
)
ai
а
1
2
m
1
2
m
i 1
i 1
ai
где ai - абсолютная погрешность i - го аргумента.
Дисперсия и среднее квадратичное отклонение случайной погрешности результата
косвенного измерения вычисляются
по формулам
2
f 2
2
Sj
S Y
j 1 a j
m
2
f 2
Sj
S Y
j 1 a j
m
134.
Доверительные границы случайной погрешности результата косвенного измерения при условии,что погрешности результатов измерений аргументов имеют нормальное распределение,
вычисляются (без учета знака) по формуле (q) t (q, n 1) S ( Y ) , где tq , - квантиль
распределения Стьюдента, соответствующий доверительной вероятности q и числу степеней
свободы (n-1).
Пример. Вычислить значение и погрешность ускорения силы тяжести g , определяемого методом
оборотного маятника, используя метод линеаризации путем аппроксимации функции разложением в
ряд Тейлора. Значение g вычисляется по формуле
2
2
g L T
где L - длина маятника, T - период свободного колебания.
При измерениях получено: длина маятника L 100.00 0.01 см.;
период колебания
4
сек., ( указаны средние квадратичные отклонения погрешностей).
T 1.0035 10
Решение. Разложение функции в ряд Тейлора до второго порядка малости имеет вид
L g
g
1 2 g 2
2 g
2 g 2
g 2 dL
dT 2 dL 2
dLdT 2 dT .......0
T
L T
T
L
2 L
T
2
В разложении первый элемент определяет среднее значении функции; второй, представленный
линейной частью разложения, содержит основные составляющие погрешностей и определяет
погрешность функции. Остальные элементы определяют остаточный член . Они содержат значения
высоких порядков малости и не учитываются, если выполняется условие
g
g
R 0.8 S 2 ( L) S 2 (T )
L
T
2
2
где S 2 ( L ) и S 2 (T ) - дисперсии погрешности результата измерений аргументов.
135.
1 2 g2 g
2
R
dT
dLdT
2
2 T
L T
R 6 2 LT 410 8 2 2T 3 (58.395759 19.1533338)10 8 0.00000039
В рассматриваемой задаче остаточный член имеет вид:
Его значение
Элементы разложения вычисляются при средних значениях аргументов. Они соответственно
g
равны:
2 2
g
L
T
9.80087
T
2 2 LT 3 19.1533338
g 2
g 2
Критерий 0.8
S
(
L
)
S (T ) 0.001748 значительно превышает значение R.
L
T
2
2
Следовательно, линеаризованная функция хорошо представляет исследуемую функцию.
Вычисленное значение ускорения силы тяжести равно
L
980.0874 980.09 см/сек2
2
T
2
Его среднее квадратичное отклонение
g 2
g
g
S ( g ) S 2 ( L) S 2 (T ) 0.002185 0.22
L
T
Результат измерений:
g 980.09 см/сек .
2
S ( g ) 0.22 см/сек .
2
2
136.
Для того чтобы не повторять стандартные операции при вычислении интервальных оценок параметров
генеральных совокупностей можно воспользоваться таблицей, содержащей соответствующие формулы.
Ниже приведена такая таблица для распределений, в которых соответствующие случайные величины
являются нормальными, а выборочные значения независимыми.
№
п/п
Оцениваемый
параметр
Информация о других
параметрах
1
μ
σ2 известно
2
3
μ
σ2 неизвестно
σ2
Известные
выборочные
параметры
S
μ известно
S
4
5
σ2
σ
μ неизвестно
μ
неизвестно
x u
x
x
x
2
0
S 02
2
0
S 02
x u
n
2
x t ( n 1),
S2
2
x S
Доверительный интервал.
(Доверительная вероятность γ,
уровень значимости α =1 – γ.)
S0
n
2
n
n2,
n2 1,
2
2 S 02
2
(n 1) S 02
2
n 1,
2
n
2
x t ( n 1),
2 S2
n 1
S0
n
2
n
n2,1
2
n 1
n2 1,1
2
(n 1) S 02
n2 1,1
2
137.
Выбор числа опытов n для определения параметра μ с заданной точностью.Поскольку при условиях, когда оценки математического ожидания и дисперсии вычисляются по
выборочным данным, и для определения ширины доверительного интервала параметра μ используется
формула
d
2 St
n 1
то последнюю можно использовать для планирования эксперимента.
Оно этом случае сводится к определению необходимого объема n выборки, при котором для заданной
доверительной вероятности получается интервал d необходимой ширины. Очевидно, необходимое количество
опытов легко вычислить, преобразуя полученную формулу для требуемого значения доверительного
интервала d
2St 2
n 1 (
)
d
Если при вычислении ширины доверительного интервала математического ожидания μ дисперсия σ
предполагается известной и, следовательно, используется статистика
x
/ n
то соответствующее количество опытов можно определить по формуле
2u
2
n
d
2
138.
• Понятие о суммировании погрешностей.В практической работе часто возникает задача определения расчетного значения
результирующей погрешности по известным значениям ее составляющих. Например, для
определения погрешности отдельного измерительного преобразователя необходимо найти
результат, возникающий от суммарного действия погрешностей, соответствующих отдельным
элементам этого преобразователя.
Погрешности прибора или информационно - измерительной системы определяются как
результат взаимодействия погрешностей всех входящих в них преобразователей и элементов.
Сложность решения такой задачи объясняется тем, что погрешности отдельных элементов
являются случайными величинами, принимающими при каждой реализации, т. е. в каждом
опыте, разные значения. При этом, в общем случае, каждая погрешность может иметь свой,
отличный от других, закон распределения вероятностей. Получение многомерного закона
распределения, построенного на основе законов соответствующих элементов, становится
практически неразрешимой задачей уже для систем содержащих малое (более 3 – х) количество
элементов.
Поэтому решение задачи сводится к выбору таких параметров, соответствующих оценок
распределений погрешностей элементов, используя которые можно было бы достаточно просто
найти соответствующие оценки результирующей погрешности без определения многомерных
законов распределения. В качестве таких оценок можно использовать среднее квадратическое
отклонение и другие подобные оценки, выбирая их в зависимости от решаемой задачи.
139.
При выборе таких параметров следует учитывать:• а) Выбранные оценки параметров распределения погрешностей элементов должны
быть переменными величинами, способными изменять свое значение в процессе
измерения изменяющейся во время опыта величины.
• б) Отдельные составляющие параметров погрешностей могут быть коррелированы
между собой. При суммировании таких случайных величин их законы распределения
резко деформируются.
• Правило суммирования основывается на предположении, что погрешность по
модулю всегда меньше значения измеряемой величины.
Поэтому изменение погрешности, представляемое в виде функции от значений
измеряемой величины, учитывается простейшим способом:
а) разделением суммируемых погрешностей на аддитивные и мультипликативные с
последующим раздельным суммированием и получением суммарной аддитивной и
мультипликативной составляющих;
б) в пределах диапазона измеряемой величины не превосходящего десятикратного
значения результирующей погрешности, зависимость погрешности от значений
измеряемой величины принимается линейной и результирующая погрешность
определяется только в начале и конце этого диапазона; полученный результат
описывается двучленной формулой. Если используемый диапазон значительно шире
предполагаемого, то он делится на соответствующие участки, на которых определяются
начальные и конечные значения, суммы которых являются данными для получения
результирующей погрешности.
140.
• Если в качестве погрешности используется среднее квадратическое отклонение, тонеобходимо учитывать наличие корреляционных связей между отдельными
составляющими. В частности, для двух коррелирующих между собой составляющих
, суммарная среднеквадратичная погрешность вычисляется по формуле
2 1 2
2
1
в которой
2
2
1, 2
- коэффициент корреляции.
• При практических измерениях трудно определить оценку коэффициента
корреляции. Поэтому при определении погрешности ограничиваются его
граничными значениями, полагая либо ρ= 0, либо ρ=1.
Тогда
• или
2
1
2
2
( 1 2 )
2
если ρ= 0;
если ρ= 1.
• Таким образом, при отсутствии взаимной корреляции СКО складываются
геометрически, а при ее наличии – алгебраически.
141.
Практические правила определения результирующей погрешности.• Результат измерения пригоден для использования лишь тогда, когда помимо значения
измеренной физической величины представлено значение соответствующей погрешности.
Производственные измерения, как правило, являются однократными, поэтому их точность
оценивается по нормированным метрологическим характеристикам используемых средств
измерения.
• Вычисляются при этом как абсолютные, так и относительные погрешности результатов
измерения. Первая используется для округления приводимых результатов, вторая – для
однозначной сравнительной характеристики точности.
• Результаты многократных измерений, получаемые при прямых измерениях, как правило ,
являются равноточными, то есть независимыми и имеющими одинаковое распределение
результирующей погрешности всего измерительного устройства.
1. Для определения оценки результирующей погрешности всего измерительного устройства
определяются корреляционные связи отдельных составляющих и их СКО.
2. Выделяются группы сильно коррелированных между собой составляющих погрешности и
внутри этих групп производится алгебраическое суммирование, Как правило, такие погрешности
вызываются одной и той же причиной. Если корреляционные связи определяются логически, то
для них коэффициент корреляции полагается равным 1.
3. Оставшиеся составляющие считаются некоррелированными и суммируются геометрически.
4. Таким образом определяются аддитивные и мультипликативные составляющие
результирующей погрешности, которые используются для построения результирующей
погрешности.
142.
Пример 1. В результате восьмикратного взвешивания автомобиля прибором без систематическихошибок получены следующие результаты: 920; 931; 940; 952; 973; 980; 995; 1005. По этим
выборочным данным найти значение несмещенной оценки дисперсии ошибки прибора:
а) если значение измеряемой величины равно 964;
б) если значение измеряемой величины неизвестно.
Пример 2. По выборке из нормальной совокупности: 10; 12: 14; 11: 8; 15; 9; 16 построить
доверительный интервал для математического ожидания и несмещенной дисперсии с
доверительной вероятностью:
a) γ = 0.95; b) γ = 0.99.
Пример 3. Из партии изделий сделана выборка объема n1 = 19. Были получены выборочные
среднее арифметическое значение диаметра изделия и дисперсия соответственно x1 = 34 мм, S1 =
9 мм2. При второй выборке объема n2 = 13 были получены x2 = 29 мм,
S2 = 4.5 мм2.
Используя объединенные выборочные данные найти 99% - ный доверительный интервал для
математического ожидания и дисперсии.
Пример 4. При испытаниях 24 изделий получены значения среднего арифметического и
выборочного среднего квадратичного отклонения их срока службы: X = 1200 и S = 12 ч.
Предполагая, что срок службы имеет нормальное распределение, определите:
а) доверительный интервал для математического ожидания с доверительной вероятностью
γ = 0.95;
б) вероятность, с которой можно утверждать, что величина ошибки определения срока службы не
превысит 10 часов.
143.
Пример 5. При многократном измерении падения напряжения U насопротивлении R0 получены значения в вольтах:
x1 =218; x2 =220; x3 = 217; x4 = 226; x5 = 219; x6 = 222; x7 = 223; x8 = 219; x9=221.
Определить действительное значение падения напряжения на сопротивлении
R0 с доверительной вероятностью Р = 0,95.
Пример 6. Проведены измерения линейных размеров трех серий деталей,
выбранных из трех различных партий. Установлена нормальность
распределений всех серий и получены следующие результаты:
1). n1 20, 1 33, S12 10;
3). n3 13, 3 29, S32 5;
2). n2 16, 2 37, S22 8;
Используя объединенные результаты измерений определить оценки
математического ожидания 0 , несмещенной дисперсии S 2 и 95%
0
доверительный интервал совокупности трех серий.
144.
определяется в ламинарном потокеПример 7 . Коэффициент внутреннего трения жидкости
методом капиллярной трубки. Для вычислений используется формула Пуазейля:
( PR4t ) 8LV
где P - разность давлений на концах трубки; R - радиус трубки с гладкими стенками;
L - длина трубки; - продолжительность времени вытекания жидкости объема V .
При проведении эксперимента были проведены многократные измерения значений параметров.
Результаты измерений: P = 2700 Па ± 1.35Па; R = 1мм ± 0.1мм; L =100мм ± 0.1 мм;
t
t = 25с ± 0.1с ; V = 5000мм3 ± 1мм3.
Используя результаты эксперимента вычислить оценку значения коэффициента
внутреннего трения, относительную погрешность и доверительный интервал.
145.
Пример 8. Шестью приборами проводились измерения одной и той же величины X.Каждым прибором было сделано семь измерений, по которым были вычислены оценки
дисперсий
S i2 ( X ) (i 1,...,7) : 3.02; 1.76; 1.30; 1.23; 0.96; 0.82.
Проверить однородность дисперсий приборов при α = 0.05; 0,025.
. Пример 9. При измерении размера X недоступного для непосредственного контакта
были получены результаты, приведенные в таблице
Xi
154
155
151
160
162
159
Ni
2
4
5
6
3
2
где Xi – значение размера полученное в опыте, Ni – количество значений,
соответствующих Xi.
Используя приведенные в таблице результаты, определить
1. среднее арифметическое значение высоты,
2. дисперсию и среднее квадратичное отклонение результатов измерений,
3. коэффициент вариации,
4. доверительный интервал для истинных значений высоты и дисперсии при
доверительной вероятности P=0.95 (уровне значимости α=0.05).
146.
Пример 10. В двух лабораториях производились измерения одного и того же объекта. Результатыизмерений приведены в таблице, где строки с X1i и n1i соответствует материалам первой
лаборатории, а X2i и n2i – второй
X1i
95
97
99
102
106
108
n1i
2
3
5
5
3
2
X2i
91
96
100
104
107
112
n2i
2
3
5
5
3
2
Используя эти результаты определить:
1.Выборочные дисперсии измерений, полученных в каждой лаборатории,
2.Проверить их однородность и сделать заключение о том, что полученные выборочные дисперсии
являются оценками общей дисперсии.
3.Вычислить общую выборочную дисперсию и соответствующее среднее квадратичное
отклонение.
4. Построить доверительные интервалы для дисперсии и математического ожидания объекта
при доверительной вероятности P = 0.95
147.
Вопросы и задачи.Какие основные операции выполняются при проведении измерений?,
Что такое чувствительность преобразователя, прибора, системы?
Как определяется цена деления шкалы прибора?
Какая оценка неизвестного параметра называется точечной ?
Назовите основные причины появления систематических и случайных погрешностей.
Приведите классификацию погрешностей измерений.
Определите понятие «случайная величина».
Определите понятия «функция распределения» и «плотность функции распределения»
случайной величины.
9. Определите «нормальное распределение».
10. Определите основные характеристики распределений.
11. Какая точечная оценка неизвестного параметра называется несмещенной ?
12. Какая точечная оценка неизвестного параметра называется состоятельной ?
13. Какая точечная оценка является несмещенной, состоятельной и эффективной?
14. Что называется интервальной оценкой неизвестного параметра распределения
генеральной совокупности?
15. Что такое доверительная вероятность (коэффициент доверия)?
16. Как определяются нижняя и верхняя границы доверительного интервала?
17. Как определяется число опытов для вычисления при заданном доверительном
интервале математического ожидания измеряемой величины
18. Для каких целей используется критерий Фишера - Снедекора?
1.
2.
3.
4.
5.
6.
7.
8.
148.
Промышленныероботы.
Основные понятия.
149. Промышленные роботы.
Структура промышленного робота.• В общем случае, промышленный робот можно представить в виде двух систем:
• 1) исполнительного устройства, представленного манипулятором и
• 2) системы программного управления его деятельностью.
• Манипулятор предназначен для выполнения двигательных функций, совершаемых в
соответствии с технологическим процессом и обеспечивает перемещение
обрабатываемых объектов в пространстве. Конструктивно он состоит: из несущих
конструкций, захвата, приводов с передаточными механизмами и средств
передвижения.
•Несущие конструкции служат для размещения всех устройств и агрегатов, а также для
обеспечения необходимой прочности и жесткости манипулятора. Они выполняются в виде
оснований, корпусов, стоек, рам, тележек, порталов и т. п.
• Система управления в соответствии с программой вырабатывает и передает
управляющие команды на приводы манипулятора. Для обеспечения функционирования
промышленного робота она представляется в виде совокупности трех систем:
• системы управления,
•информационно-измерительной системы с устройствами обратной связи и
•системы связи.
•На рис. 1 представлена одна из конструкций промышленного робота.
150.
Рис.9. Конструкция промышленного робота:1 - датчик обратной связи; 2 — захватное устройство; 3 — кисть; 4 —рука
манипулятора; 5 — колонна; 6 — несущая конструкция (основание); 7 - привод
руки; 8 - блок управляющего устройства с пультом
151.
Датчик обратной связи обеспечивает контроль выполнения манипуляторомуправляющих воздействий.
Захватное устройство –это узел манипулятора, обеспечивающий программное
передвижение объекта манипулирования.
Привод обеспечивает движение звеньев манипулятора в соответствии с сигналами,
поступающими с устройства управления.
В соответствии с технологическими процессами, для которых предназначен
промышленный робот, в нем предусматривается средство перемещения, состоящее из
ходовой части и приводных устройств.
• Если наблюдать за работой промышленного робота, занимающегося укладкой деталей, то
фиксироваться будет следующее.
• Сначала рука робота, оканчивающаяся захватом, перемещается в пространстве и занимает
исходное положение, в котором захватом удобно взять деталь.
• Затем захват берет деталь, то есть фиксирует ее положение относительно руки, а затем рука
совершает движение в пространстве, при котором деталь из начального положения перемещается
в заданное.
• Это наблюдение позволяет сделать заключение, что необходимую, заданную работу совершает
«рука», то есть система промышленного робота, называемая манипулятором.
• Очевидно, для того чтобы манипулятор совершил требуемое движение, в промышленном роботе
необходимо наличие систем, которые
• содержат программу движения элементов манипулятора,
• способны через определенные механизмы в виде команд передавать ее деталям манипулятора,
• контролируют правильность и безопасность программного движения «руки».
• Это выполняют системы связи, управления, исполнительные механизмы и информационно –
измерительная система.
152.
Промышленные роботы с адаптивной системой управления.Промышленный робот предназначен для автоматизации основных и вспомогательных
операций и для обслуживания оборудования в соответствии с заданным технологическим
процессом и значительно отличается от андроидов.
Адаптивный промышленный робот может быть представлен композицией систем:
• Система связи.
• Информационно – измерительная система.
• Система автоматизированного управления (управляющая система).
• Двигательная (исполнительная) система.
Архитектура адаптивного промышленного робота представляется схемой
Оператор.
Система связи.
Информационно –
измерительная система
Система автоматизированного
управления.
Внешняя среда.
Двигательная система.
153.
В настоящее время в производстве широко используются системыадаптивных промышленных роботов функционирующих в виде
робототехнических комплексов или гибких автоматизированных производств
(ГАПов). При этом значительно возрастает производительность производства и
эффективность роботов.
Архитектура (структурная схема) адаптивного промышленного робота,
встроенного в РТК, может быть представлена в следующем виде
Система связи РТК
Система автоматического
управления РТК
Технологические системы
РТК
Система связи П.Р.
Информ.- измерит.
системы П.Р.
Система автоматическ.
управления П.Р.
Двигательная
система П.Р.
Информ.- измерит.
системы РТК
154.
Основные функции систем ПР.Совокупность систем: управляющей, информационно-измерительной и связи образует
информационно-управляющую систему робота, обеспечивающую обработку и передачу информации,
и непосредственное управление приводами и механизмами исполнительной системы с целью
организации технологического процесса и активного взаимодействия робота с окружающей средой.
Система связи.
• Система связи служит для оперативного обмена информацией между оператором и
промышленным роботом на выбранном языке, а также обеспечивает связь (обмен информацией)
промышленного робота с технологическим оборудованием и обмен информацией внутри
робототехнического комплекса (РТК) или гибкого автоматизированного производства (ГАПа).
Цели такого обмена разнообразны:
диалог САУ и оператора во время обучения промышленного робота; при выполнении
контрольных функций, диагностики неисправностей; настройки подсистем;
• передача в систему автоматизированного управления (САУ) заданий от оператора
на проведение работ по принятой технологии производства,
• обмен информацией с другими роботами; регламентная проверка и т.п.
Устройства связи – это набор различных средств, обеспечивающих эту связь. В частности, такими
средствами являются: интерфейсы, видеоконтрольные пульты, на которых оператор получает
визуальную информацию о процессе функционирования промышленного робота.
• Информация от оператора поступает обычно через устройство ввода или пульт управления путем
физического воздействия (нажатие кнопки или клавиши). В последнее время начинает применяться
речевое общение, а также ввод информации с помощью биопотенциалов (биоуправление).
Информация от робота к оператору поступает, как правило, в форме световых и звуковых
сигналов, а носителями этой информации являются разного рода табло, - цифровые индикаторы,
дисплеи, телекамеры и т.п. Результаты лабораторных исследований дают основания полагать, что в
ближайшем будущем станет возможным речевое общение с роботом на естественном человеческом
языке.
155.
Информационно – измерительная система.• Это высокоорганизованная система очувствления, содержащая
искусственные органы чувств промышленного робота, обеспечивающие его
деятельность .
Для того чтобы робот выполнял свои функции необходимо. чтобы он
1. чувствовал себя, то есть
фиксировал свои движения,
определял состояния подсистем,
оценивал правильность движений и работоспособность подсистем, которыми
являются исполнительные органы (приводы) манипуляторов,
2. чувствовал внешнюю среду, то есть соотносил расположение своих
подсистем и их перемещения с расположением и движением внешних предметов
в области его функционирования, а также реагировал на изменение внешних
условий.
• Система очувствления - это сенсорные датчики, которые выполняют роль
технических органов чувств промышленного робота и решают две главные
задачи:
1. обеспечивают необходимую точность производства;
2. обеспечивают автономность функционирования промышленного робота в
изменяющихся условиях работы.
156.
• Для решения этих задач необходимо, чтобы сенсорная система воспринимала,преобразовывала и доставляла в систему автоматизированного управления
информацию:
• о состоянии внешней среды и оборудования РТК ( это выполняется датчиками
внешней информации),
• о состоянии систем промышленного робота (это выполняется датчиками
внутренней информации).
• На основании этой информации информационно измерительная система
формирует сигналы внешней и внутренней обратной связи, используемые системой
автоматизированного управления для организации функционирования
промышленного робота.
• Таким образом, сенсорная система с помощью сенсоров фиксирует результаты
функционирования элементов промышленного робота и оценивает правильность
этого функционирования.
• В качестве элементов сенсорной системы используются телевизионные и оптико электронные устройства, лазерные и ультразвуковые дальномеры, акустические
датчики и гидролокаторы, тактильные, контактные и индукционные датчики,
системы технического зрения, сигналы от которых преобразуются в подсистемах
АЦП, дешифраторов, усилителей, дискриминаторов и других элементов, кончая
ЦАП а также датчики положения, скорости, сил и моментов, потенциометры,
тахометры, акселерометры и т. п.
157.
Система автоматизированного (адаптивного) управления (САУ).• Это «мозг» промышленного робота, вырабатывающий алгоритмы адаптации и управления
двигательной (исполнительной) системой на основе заложенной программы, в соответствии с
сигналами обратной связи , поступающими от сенсорной системы. На основе этих сигналов САУ
вырабатывает закон управления приводами двигательной системы (ДС) – манипулятора.
• Основными функциями этой системы являются;
• распознавание ситуаций и моделирование среды функционирования робота,
• планирование действий других систем,
• программирование и оптимизация движений манипулятора и принятие целенаправленных
решений,
• а также организация общения робота с человеком и взаимодействующими устройствами на
принятом языке.
Управляющие системы роботов реализуются на базе компьютеров и микропроцессоров,, а также
пневматических или электрических логических элементов, аналоговых и цифровых систем. Они
содержат широкий набор входных (аналого-цифровых) и выходных (цифро-аналоговых)
преобразователей и интерфейсных каналов связи, число которых может колебаться от нескольких
десятков до нескольких тысяч. По этим каналам, как по нервным волокнам, передаются
непрерывные (аналоговые) и дискретные (цифровые) сигналы к САУ и от нее, определяющие
деятельность промышленного робота и его функционирование.
Адаптационные возможности и интеллектуальные способности промышленного робота
определяются, в основном, алгоритмическим и программным обеспечением его системы
автоматизированного (адаптивного) управления.
Ее интеллектуальные функции :
1. Организация общения промышленного робота с оператором (интеллектуальный интерфейс);
2. Распознавание образов и ситуаций;
3. Моделирование среды;
4.Планирование операций и принятие решений;
5.Программирование и оптимизация движений.
• .
158.
• Биоуправление - это система управления приборами, механизмами и устройствами, вкоторой в качестве управляющих сигналов используются различные проявления
жизнедеятельности организма. за исключением большинства произвольных движений.
Для биоуправления используются: Биоэлектрические потенциалы, генерируемые
различными возбудимыми тканями, механические и акустические явления,
сопровождающие функционирование сердечно-сосудистой системы и дыхания, колебания
температуры тела и др.
• Широко распространены системы биоэлектрического управления. В этих системах
биопотенциалы, генерируемые скелетными мышцами, сердцем, головным мозгом,
нервами, подвергаются усилению, переработке и затем выполняют роль командных,
управляющих сигналов.
• Важную группу устройств с биоэлектрическим управлением составляют активные
протезы, для управления которыми используются биопотенциалы частично
ампутированных, парализованных или полностью сохранённых мышц. Выполняя
привычные движения, человек управляет электромеханическим или пневматическим
приводом, который осуществляет движения в суставах парализованной конечности или
шарнирах протеза. В 60-х гг. 20 в. не только в СССР, но и в Англии, Канаде (по советским
лицензиям) налажен промышленный выпуск биоуправляемых протезов.
• Биоэлектрическое управление применяют также в технике, например, в
биоманипуляторах, управляемых на расстоянии при работе в подводных или вредных
условиях.
159.
Двигательная (исполнительная) система.• Исполнительная, или моторная система - это устройства, предназначенные для непосредственного воздействия
на объекты окружающей среды и/или взаимодействия с ними в соответствии с управляющими сигналами,
формулируемыми информационно-измерительной системой или непосредственно оператором
• Она определяет динамические свойства промышленного робота, его способность совершать движения,
диктуемые технологическим процессом. Ее можно представить состоящей из двух частей:
1. Исполнительных устройств (ИУ) – «моторной» системы, представляющей систему приводов, служащей для
отработки выработанных САУ алгоритмов адаптации, определяющих необходимые силы и моменты для работы
манипулятора;
2. Исполнительных органов, в качестве которых используются манипуляторы и педикуляторы, тележки с
колесным или гусеничным шасси, силовые лазерные установки, воздействующие на среду, устройства,
воздействующие на объекты среды при помощи магнитного силового поля и др.
• Конструктивные элементы двигательной системы – это электрические , гидравлические и пневматические
приводы. приводящие в движение исполнительные органы (ИО): манипуляторы, тележки, силовые установки
различного типа.
• Управляющие сигналы, формируемые САУ поступают на исполнительные приводы двигательной системы и
фактически отрабатываются ею. Сенсоры, расположенные на этих элементах контролируют их деятельность. Этим
обеспечивается возможность автоматизации технологических процессов, возлагаемых на РТК.
• Адаптивный робот с элементами искусственного интеллекта, контролируя себя и воспринимая окружающую
среду с помощью сенсорной системы формирует в своей памяти образы этих состояний и объектов, то есть
автоматически обучается. В частности, это обучение новым понятиям, распознаванию образов,
самопрограммированию, планированию и принятию решений.
• Адаптивный робот – система обучаемая. Его САУ в процессе обучения изменяет свои параметры, то есть
адаптируется и потому является адаптивной , гибкой и универсальной, за счет этого существенно отличаясь от
обычных средств автоматизации.
160.
Свойства адаптивного робота.Адаптивный робот – система обучаемая.
Его САУ в процессе обучения изменяет свои параметры, то есть
адаптируется к задаваемым условиям и потому является адаптивной , гибкой и
универсальной, существенно отличаясь от обычных средств автоматизации.
• Под гибкостью понимается способность управляющих систем
роботов быстро перестраиваться на выполнение новых операций.
• Это обеспечивается перепрограммированием движений роботов в
процессе обучения.
• Быстрота переобучения новым операциям придает РТК ту гибкость,
которую имели только технологические ячейки, обслуживаемые
человеком. Как правило, гибкость робота обеспечивается
дополнительными блоками, подключаемыми (отключаемыми) по мере
необходимости.
• Адаптивность робота проявляется в его способности быстро
реагировать на внешние и внутренние возмущения и автоматически
приспосабливаться к изменяющимся условиям функционирования.
• Адаптационные возможности роботов определяются характером их
очувствления, то есть ассортиментом датчиков вешней и внутренней
информации и степенью « интеллекта», то есть алгоритмическим и
программным обеспечением САУ.
161.
• Универсальность (многофункциональность) позволяет успешно решатьцелый класс производственных задач.
• Этот класс тем шире, чем шире функциональные возможности робота,
определяемые его кинематической схемой, динамикой приводов,
информативностью датчиков внешней и внутренней диагностики, уровнем
искусственного интеллекта.
• В принципе универсальность роботов позволяет автоматизировать любые
операции, выполняемые человеком на современном уровне.
• В соответствии с вышеизложенным в ГОСТе 2586 – 83 дано определение.
• Промышленный робот – это автоматическая машина, представляющая
собою совокупность манипулятора и перепрограммируемого устройства
управления, для выполнения в производственном процессе двигательных и
управляющих функций, заменяющих функции человека при перемещении
предметов производства и оснастки.
• При этом под перепрограммируемостью понимается возможность менять
управляющую программу с помощью человека – оператора или автоматически
путем переключения программ заранее внесенных в память устройства
управления.
162.
Использование роботов.• Робот вместе с обслуживаемым им оборудованием образует роботизированный
технологический комплекс, Если этот комплекс имеет единую САУ , построенную на базе
средств вычислительной техники, то он называется робототехническим комплексом
(РТК) с управлением от ЭВМ.
• Простейшим видом РТК являются роботизированные технологические ячейки (РТЯ),
предназначенные для автоматизации небольшого числа основных или вспомогательных
операций
• Более сложный вид РТК это роботизированные участки и линии (соответственно РТУ
и РТЛ), в состав которых входит несколько единиц технологического оборудования.
• Промышленные РТК - это ядро гибких автоматизированных производств (ГАПов), в
которые входят РТУ и РТЛ, А интеграция ГАПов – это роботизированный завод –
автомат с гибкой безлюдной технологией.
• Эффективность от изолированного, в единственном числе, использования
промышленных роботов сравнительно невелика. В ценах 1987 года годовой
экономический эффект составлял ( 5000 – 10000 ) рублей, что соответствовало
окупаемости в 3 – 4 года. При таком использовании робот в зависимости от его качеств
может заменить от одного до трех работающих ( низкой квалификации ) и повышает
производительность на (20 – 40)%. Низкая эффективность при изолированной
эксплуатации и высокая стоимость роботов является одной из причин сдерживания
темпов роботизации нашей промышленности. При использовании роботов в составе РТК
и РТУ их эффективность возрастает.
163.
Кинематическая схема манипулятора.•Чтобы предметно охарактеризовать работу и взаимодействие систем манипулятора П.Р.
рассмотрим его кинематическую схему, изображенную на рисунке 10.
2
3
x1
1
4
z1
z0
5
6
x0
zN
y0
Рис.10. Кинематическая схема манипулятора.
Изгиб
Шаровой шарнир
Линейное
перемещение
Вращение
Изгиб с закрепленным
концом
164.
• Каждую отдельную деталь манипулятора, совершающую движение, принятоназывать звеном.
• Сочлененные соседние звенья, если возможно их относительное перемещение,
образуют кинематическую пару.
• Класс этой пары определяется числом условий связи K ( 1 ≤ K ≤ 5 ), налагаемых на
относительное движение звеньев, образующих эту пару.
• Кинематической паре K – го порядка (класса) соответствует
h = (6 – K)
• где h – число степеней свободы кинематической пары, то есть число независимых
параметров, определяющих относительное положение звеньев.
• Число степеней свободы всего манипулятора H определяется числом независимых
движений, в которых могут участвовать его звенья:
5
Н 6 N kp
k
k 1
• где N – общее число подвижных звеньев; pК – число кинематических пар K – го
класса.
• Для осуществления произвольного перемещения и ориентации захватного
устройства в рабочем пространстве должно выполняться условие: H = 6, т.е. число
степеней свободы манипулятора должно быть равно 6.
• При H > 6 соответствующий манипулятор называется механизмом с избыточностью
165.
• Для анализа и синтеза пространственного движения манипулятора, представленногопоследовательным соединением вращательных и поступательных кинематических пар, каждому
звену манипулятора ставится в соответствие декартова система координат
Oi Xi Yi Zi (i = 0,1,…,,N).
• Если робот имеет неподвижное основание, то начальная система O0 X0 Y0 Z0 совпадает с
лабораторной системой координат O X Y Z. Дальнейшее присвоение номеров системам координат
может производится по правилу:
• ось Zi совпадает с осью сочленения звеньев i и i+1 ; ось Oi Xi направляется по
перпендикуляру к осям сочленений Zi -1 и Zi ;
направление оси Oi Yi определяется выбором правой или левой системы.
• Система ON XN YN ZN связывается с захватом манипулятора так, чтобы ось ZN совпадала с
направлением последнего звена.
• Преобразование системы координат Oi-1 Xi-1 Yi-1 Zi-1 в систему Oi Xi Yi Zi можно осуществить
последовательным выполнением следующих действий:
1. - поворотом вокруг оси Zi-1 на угол θi до установления параллельности осей Oi-1 Xi-1 и Oi Xi;
2. - переносом вдоль оси Zi-1 на величину Si до совпадения осей Oi-1 Xi-1 и Oi Xi на одной
прямой;
3.- переносом вдоль оси Oi Xi на величину ai до совпадения Oi-1 и Oi ;
4.- поворотом вокруг оси Oi Xi на угол αi до совмещения всех осей.
166.
• Видно, что преобразование системы координат определяется 4 – мя параметрами: θi, ai,Si, αi , из которых два: ai, и αi являются постоянными для рассматриваемого
манипулятора.
• В зависимости от типа сочленения кинематической пары только один из параметров
(θi, Si) является переменным.
Он принимается за обобщенную координату, обозначается qi и представляется в виде:
qi = σi θi + (1- σi)Si
где
1 - для вращательной пары;
i
0 - для поступательной пары;
• Для рассматриваемой пары остальные 3 параметра являются постоянными и их
значения определяются конструкцией манипулятора.
• При такой схеме и введенных обозначениях положение манипулятора в пространстве
однозначно определяется вектором обобщенных координат (то есть действующих связей)
q [q1 , q2 ,..., qi ,..., q N ]T
значение которого определяется положением каждого звена.
• Очевидно, что заданному положению захвата (конечного звена) соответствует
конкретное значение вектора q определенное для соответствующих значений
обобщенных координат qi.
167.
ОСНОВНЫЕ СХЕМЫ КИНЕСТЕТИЧЕСКИХ ДАТЧИКОВ.1.Датчики положения и перемещения.
Датчиком положения и перемещения (ДПП) называется
устройство, воспринимающее контролируемое положение и/или
перемещение объекта (линейное или угловое)
и
преобразующее его в выходной (обычно, электрический)
сигнал, удобный для дальнейшей обработки, хранения или
передачи по каналу связи.
К ДПП робототехнических и других подобных систем
обычно предъявляются следующие требования:
• точность (полная погрешность - не более 1%);
• быстродействие (определяемое через минимальную частоту
опроса - не менее 50 Гц);
• надежность (доверительная вероятность - не менее 0,9);
• помехоустойчивость;
• технологичность;
• низкая стоимость.
168.
В соответствии с ГОСТ 20964-75 и 20965-75 устанавливаются шесть классов
точности ДПП.
Для датчиков угловых перемещений при поворотах в пределах 3600 допускаемая
систематическая погрешность: для 1 класса точности она не должна превышать 50’’,
для 6-го класса - 1’’.
Для датчиков линейных перемещений задаются 15 интервалов координатных
перемещений.
Шесть наиболее высоких классов точности таких датчиков положения и
перемещения (ДПП) представлены в таблице 1.
Таблица 1
Интервал
перемещения
в мм.
Предел допускаемой систематической погрешности в мкм.
1
2
3
4
5
6
10…32
12
6
3
1.5
0.5
0.3
32…125
16
8
4
2
1
0.5
125…200
18
9
5
2.5
1
0.5
200…320
20
10
5
3
2
0.8
320…500
25
12
6
3
2
0.8
169.
Датчики угла поворота вала.• Датчики угла – это устройства, выдающие при помощи электрического сигнала
значение угловой координаты объекта, совершающего вращательное движение.
• Этот сигнал используется: а) как управляющий сигнал в задающих устройствах.;
• б) для осуществления обратной связи в исполнительных устройствах.
• Для создания таких сигналов применяются аналоговые или цифровые устройства:.
• аналоговые датчики бывают резистивными и индукционными;
• цифровые - резистивными, оптическими и магнитными.
• Задание на движение вала исследуемой системы выполняется с помощью датчика
угла, угловой координатой которого является угол поворота командной (задающей) оси.
Такой же датчик применяется для измерения угла поворота исполнительного вала.
• Разность сигналов двух датчиков – «рассогласование» - является управляющим
сигналом на входе системы, а эти два датчика образуют «датчик рассогласования».
• Задание на изменение угла исполнительного вала может формироваться и без датчика
угла с командной осью, Оно представляется в виде вычислительной программы. В таких
системах с программным управлением выходной сигнал датчика угла исполнительного
вала вводится в программу, вырабатывающую задание на движение, и сравнивается с
программным.
• В робототехнике наибольшее распространение получили аналоговые индукционные
датчики: резольверы (вращающиеся трансформаторы), индуктосины и редуктосины.
170.
Датчики перемещений аналогового типа.Эти датчики имеют широкое распространение вследствие простоты конструкции, малой
стоимости и освоенной технологии изготовления. В них используются индукционный, индуктивный и
электромеханический способы формирования аналоговых сигналов.
1.Резистивные датчики положения или датчики активного сопротивления.
• Резистивные датчики положения (РДП) – это электромеханические датчики измерения
перемещений, создаваемые на базе потенциометров (делителей напряжений), позволяющие
получить электрический сигнал постоянного или переменного тока, пропорциональный величине
перемещения подвижного контакта.
• Основой его является резистивный преобразователь, представляющий собой реостат, движок
которого перемещается в соответствии с движением объекта.
• Входным сигналом преобразователя является величина перемещения движка (подвижного
контакта) , выходным – соответствующее изменение сопротивления.
• В зависимости от материала резистивного элемента датчики бывают проволочные (резистивные),
пленочные и пластиковые. Наиболее распространенными являются проволочные, в которых в
качестве материала провода используются константан, манганин, нихром и другие высокоомные
сплавы.
• Они используются для измерения угловых и линейных перемещений. По характеру перемещения
движка датчики бывают линейными и круговыми ( с углом поворота α < 3600) ; по способу
получения сигнала - контактными и бесконтактными.
• Разрешающая способность резистивного преобразователя определяется толщиной провода;
чувствительность - мощностью, рассеиваемой на резисторе при его работе без перегрева.
• Схема кругового реостатного преобразователя приведена на рисунке 11.
171.
•Основой датчика является цилиндрический каркас (6), выполненный из изоляционного материала,на который с равномерным шагом наматывается проволока (5). Изоляция проволоки на верхней
границе каркаса удаляется для обеспечения контакта с движком, на котором крепится токосъемная
щетка (4).
• Вторая щетка (2) контактирует с
токосъемным кольцом (3). Движок жестко
скреплен с приводным валиком, но
электрически изолирован от него.
• Контактами (7) и (8) потенциометр датчика
включается в электрическую цепь питания.
• При вращении валика щетка (4) скользит по
зачищенной проволоке на верхней границе
каркаса и через токосъемное кольцо и контакт
(9) выдает выходной сигнал.
• Для получения линейной зависимости
выходного сигнала от угла поворота валика
используются датчики с каркасами
переменной высоты, с переменным шагом
намотки поволоки, с потенциометром ,
содержащим участки проволоки разного
удельного сопротивления и т. д.
7
Рис. 11.
7
9
9
вых
88
Электрическая схема простейшего датчика с линейным потенциометром приведена на
рисунке 12.
172.
На рисунке 12 обозначено:(7)
Ri
Rп- сопротивление потенциометра;
Rп - R
(9)
Ei
L
X
Rн – сопротивление нагрузки;
Ri – сопротивление источника тока;
Rп
Rн
Uвых
С
Ei – напряжение источника;
L – длина потенциометра;
X – длина пути, пройденного движком соответствующая
сопротивлению R;
(8)
Рис.12. Схема резистивного датчика.
Uвых - выходной сигнал.
Общее сопротивление электрической цепи датчика R0 является омическим, поскольку межпроводная
емкость С не учитывается в силу малости, и равно:
R0 = Ri +(Rп – R) +R2, где R2 = RRн/( R+Rн ).
Ток в цепи равен:
J = Ei /R0,
И, следовательно,
Uвых = JR2 = Ei R2 /( Ri+Rп – R+R2 ).
Учитывая, что Ri мало и им можно пренебречь, то подставляя в последнее соотношение R2, можно его
представить в виде:
Rн Rп
R
U в ых Ei
(1)
Rн Rп R Rп ( R Rп ) 2 Rп
где выходной сигнал представлен в виде нелинейной функции выхода преобразователя R/Rп.
173.
•Поскольку сопротивление потенциометра Rп= ρL/S = aL, (где а = const) пропорционально его длине, и•R = ρx/S = ax , то очевидно, что в рассматриваемой схеме датчика
R (
x
) Rп
L
•то есть регистрируемое сопротивление R пропорционально координате X контакта движка для потенциометра
длиною L. С учетом полученного соотношение (1) можно записать
U вых Ei
Rн Rп
X
R Rп X L ( X L) 2 L
(2)
•Для датчика, представленного на рисунке 11, выходной сигнал рассматривается как функция углового
перемещения ползунка φ. В этом случае сопротивление пропорционально углу поворота, то есть
R / Rп=φ/φ0.
Следовательно,
U вых Ei
Rн Rп
R Rп 0 ( 0 ) 2 0
(3)
•где φ0 –максимальное значение угла поворота движка.
•В полученных формулах выходной сигнал является нелинейной функцией измеряемой величины:
прямолинейного перемещения ползунка, связанного с соответствующим звеном манипулятора, или изменения
величины угла φ, характеризующим поворот вала соответствующего звена.
• Характер и величину возникающего в этом случае отклонения от линейной зависимости
•можно определить следующим образом.
•Нелинейную зависимость Uвых от R ( или от X ) можно представить с помощью коэффициента нелинейности η.
Если в (1) числитель и знаменатель поделить на Rн /Rп и обозначить
174.
2Rп
R R
Rн Rп Rп
R
(4)
U в ых Ei (1 )
то (1) примет вид
R
0
R
0;
п
Rп
R
1 0
Rп
(5)
Величина является функцией R Rn и зависит от Rн /Rп, как от параметра. Она достигает
максимума при R/Rп = 0,5.
При Rн /Rп = 10 погрешность от нелинейности,
определяемая
таким образом, достигает 2.50% и
1
x x
U1( x)
1 1( x)
убывает с ростом этого параметра. При Rн /Rп = 100 она равна 0.25 %. Зависимости
иU
в ых
от R/Rп =X
приведены на рис 13.
0.3
0.2
( x)
1( x)
0.1
U ( x)
U1( x)
0
0.1
0.2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
Рис.13.
•Характеристики РДП разделяют на две группы: эксплуатационные и метрологические.
•Первые характеризуют номинальное сопротивление Rп. В качестве Rп используются
сопротивления величиной от 0,1 .до 100 кОм , с допускаемым отклонением Rп= 1%,
максимальной частотой входного воздействия fmax до 1 кГц и сроком службы (измеряется в циклах
полного преобразования) 106 циклов для реостатного РДП, 108 - для пластикового).
175.
•Среди метрологических характеристик выделяются: погрешность нелинейности δНЛ, разрешающая способность(погрешность нечувствительности) δНЧ, погрешность люфта δЛ и погрешность вследствие шума сигнала. В
соответствии со значением полной погрешности РДП отечественные модели, используемые в робототехнике,
принято разделять на три класса точности (табл. 2).
Таблица 2.
Классы точности отечественных РДT
Класс точности
1
2
3
Погрешность %
+ 0.25
+0.50
+1.00
Одним из важнейших параметров РДП является максимальная скорость перемещения движка,
определяющая верхний частотный предел входных воздействий - частоту среза РДП.
Определение частоты производится следующим образом. Предположим, что движок линейного РДП
совершает в окрестности положения равновесия l0 синусоидальное движение с амплитудой l = l0 + l1 sin wt.
(w= 2πf). Следовательно, для максимальной скорости будет справедливо выражение:
dl
l1
dt
max
Очевидно, что данное значение должно быть меньше заданного максимума Vmax, и тогда:
f Vmax / 2 l1
(Например, для типичных значений Vvax = 2 м/с, l1= 0,3 мм,
величина
f < 1,1 кГц).
Аналогично, для круговых РДП ее значение
f < 3600 Nmax /2πa1
где a1 - амплитуда перемещений в градусах. (При Nmax = 40 об/с, a1 = 20, f < 1,1Кгц).
Проволочные низкоомные (до 10 кОм) РДП имеют постоянную времени t ~ 106 ... 107 c,
высокоомные ~104 ... 105 c и не используются при частотах сети выше 10 ... 50 кГц.
На таких частотах применяются пленочные датчики.
176.
(Погрешность нелинейности (мультипликативная составляющая полной погрешности)
обусловлена отклонением отношения Uвых /Uи нагруженного датчика от ненагруженного.
Величина относительной погрешности δнл равна:
u u
3 2
нл
2
uи
kн 2
Значение δнл, а, следовательно, и чувствительность РДП зависят от величины относительного
перемещения движка и сопротивления нагрузки. Наибольшее отклонение реальной кривой от
идеальной имеет место при 2 3 .
(Например, для Rн > 100 Rп, δнл max не превышает 0,15%, а при Rн = 2 Rп она составляет 17%).
Линеаризация результатов достигается двумя способами: включением резистора R*
последовательно РДП (рис. 12а), или R* = R3 параллельно верхнему плечу РДП (рис. 12б). В первом
случае, обозначив k R Rп 1
R Rп kн Rн Rп
23
получим:
Оптимальная линеаризация достигается при k = 1,5.
R*
Rg
a)
Rн
Uвых
Uи
Uи
нл
U вых
kн
U и kkн k 2
Rп
R*
.
б)
Uвы
Rн
Рис. 12. Схемы компенсации нелинейности функции преобразования РДП.
177.
• Разрешающая способность РДП характеризуется зоной нечувствительности D,xmax
равной:
D
n ,
• где x max - диапазон измерения (линейный или угловой) РДП, n - число витков.
• Для проволочных РДП разрешение D, определяется максимальным перемещением,
необходимым для перехода движка из своего положения в ближайшее соседнее.
• Оно зависит от формы и толщины проволоки, размеров движка и меняется по мере их
износа. (Для увеличения разрешающей способности РДП используют проволоку малого
диаметра, правда это приводит к более быстрому износу). В абсолютном измерении для
лучших линейных РДП
• D ~ 10 мкм.
• Величина погрешности нечувствительности нч проволочного РДП определяется
выражением:
нч
DR
Rп
• где DR - минимальная величина изменения сопротивления РДП.
• Значение нч для РДП с проволочными элементами составляет ~ 0,1 ... 3%, достигая
для прецизионных моделей ~ 0,002%.
178.
Зона нечувствительности зависит от количества витков проволоки,замыкаемых движком, которое, даже в лучших моделях изменяется по длине
датчика. Поэтому функция преобразования РДП будет «ступенчатой», причем
размеры ступенек неодинаковы.
Это приводит к расширению полосы погрешностей за счет дополнительной
нелинейности.
Учитывая это обстоятельство, получим: D
( нч ) min
Rп
R
2n
, и следовательно
1
2n
В целом аддитивная погрешность РДП оценивается значением 1/n … 2/n.
•Дискретность функции преобразования проволочных РДП составляет для
однооборотного типа ПТП-1 -150 мВ, для геликоидального двадцатиоборотного
типа ППМЛ -10 мВ.
179.
•Наилучшее разрешение обеспечивают полосковые РДП, имеющие мелкозернистуюR
DR п
структуру.
2n
•(Для них погреДля увеличения разрешающей способности РДП используют рычажный
привод, увеличивающий масштаб перемещения движкашность нечувствительности
составляет ~ 0,1 мкм).
•.
1 и осью датчика. В первом
• Люфт РДП обусловлен зазором между
( нч )движком
min
приближении справедливо:
2n
•где d - радиальный зазор между осью и втулкой, r - длина движка, g - угол дуги,
DR погрешность
R0 d gr
занимаемый обмоткой. Тогда,
люфта δл будет
л Dравна:
R R0 d gr
•Для уменьшения величины δл в конструкциях РДП используются осевые подшипники
(например, в отечественных моделях СП5-21, СП4-8).
•Шумы РДП обусловлены как свойствами элементов датчика, так и наводками в
измерительной цепи датчика. В первом случае - это аддитивная помеха, обусловленная
изменением сопротивления РДП при перемещении движка. Она является следствием
разнородности структуры элементов в зоне контакта, вибраций и т.д.
•Запишем: U вых(x) = U сигн(x) + u(x), причем u(х) = R ш(x) i. Здесь U сигн(x) - напряжение
«чистого» сигнала, u(x) - составляющая шума, i - ток через подвижный контакт (i
обычно не более 1 мА), R щ(x) - шумовое сопротивление РДП.
•Допустимый уровень шума РДП указывается в паспорте на датчик.
180.
Вращающиеся трансформаторы.• К вращающимся трансформаторам относят информационные электрические машины малой
мощности тока, предназначенные для преобразования угла поворота вала в электрическое
напряжение, пропорциональное функциям угла поворота α: sinα и cosα .
• Вращающиеся трансформаторы широко используются в автоматических следящих системах и
регуляторах, робототехнике, системах навигации и других областях техники.
• По выполняемым функциям вращающиеся трансформаторы подразделяются на следующие
группы:
• синусно-косинусные;
• линейные;
• масштабные;
• датчики и приемники трансформаторных систем дистанционной передачи угла;
• фазовращатели.
• Наиболее универсальными являются синусно-косинусные вращающиеся трансформаторы,
которые практически могут выполнять любую из приведенных функций.
• Наибольшее распространение получили двухполюсные вращающиеся трансформаторы,
имеющие конструкцию близкую к двухфазным асинхронным двигателям. Двухполюсный
вращающийся трансформатор представлен на рис. 1.
Рис. 14. Двухполюсный вращающийся трансформатор типа ВТ-5.
181.
Вращающийся трансформатор (ВТ) – индукционная электрическая машина неявно полюсного типа, укоторой выходное напряжение является функцией угла поворота вала. Он имеет малые размеры, высокую
помехозащищенность, достаточную разрешающую способность.
Поперечное сечение вращающегося трансформатора.
Вращающийся ротор
Неподвижный статор
Вал датчика
Обмотки статора
Обмотка ротора
Рис. 15.
• Основными деталями вращающегося трансформатора являются:
• неподвижный статор и вращающийся ротор, изготовляемые из листов пермаллоя (железоникелевый сплав,
содержащий от 36 до 85% Ni% остальное Fe, и легирующие добавки) или электротехнической стали.
• В равномерно распределенных пазах статора и ротора размещаются по две, расположенные взаимно
перпендикулярно, обмотки из тонкого медного провода.
• На статоре располагаются обмотки квадратурная и возбуждения , на роторе - синусная и косинусная.
182.
• Вращающиеся трансформаторы бывают контактными и бесконтактными,двухполюсными и многополюсными.
• Контактные ВТ являются более точными и имеют достаточно высокий
коэффициент передачи. Однако наличие коллектора и контактирующих с ним
щеток создает проблемы надежности. Бесконтактные являются более надежными.
• Двухполюсные ВТ имеют меньшую точность и чувствительность по сравнению
с с многополюсными – резольверами и редуктосинами.
• В качестве датчика угла ( положения) ВТ работают в фазовом или амплитудном
режимах. В первом случае для измерения угла используется изменение фазы
сигнала, во втором – изменение амплитуды.
• При работе ВТ в режиме фазовращателя реализуется один из возможных
принципов:
1. Создание потока возбуждения в виде вращающегося магнитного поля;
2. Суммирование выходных напряжений датчика в рабочем режиме с помощью
фазосдвигающих RC – цепочек.
Электрические схемы соответствующих фазовращателей приведены на
рисунках 16 : первый (а) , второй (б) .
183. Поперечное сечение вращающегося трансформатора.
Рис 16. Схема фазовращателя на основе синусно – косинусного вращающегося трансформатора.• При работе ВТ в первом режиме ( схема а ) для создания вращающегося магнитного поля на статорные обмотки
подаются напряжения с одинаковыми амплитудами, сдвинутые по фазе на π/2.
• Переменное напряжение заданной частоты вырабатывается генератором ( Г ) и подается на фазорасщепитель ( Фр
), который создает два переменных напряжения
U С2 E0 Sin( t 2) E0Cos t .
U C1 E0 Sin t ;
(1)
подаваемые на соответствующие обмотки статора. Используемые частоты: 400,…,4000 гц.
• В начальном положении, когда угол поворота ротора относительно неподвижного статора равен нулю, на роторных
обмотках воспроизводится сигнал от статора, соответствующий сигналу поступившему на него от генератора.
• При повороте ротора от начального значения на угол α на роторных обмотках появляются выходные напряжения:
U Р1 kE0 ( Sin t Sin Cos t Cos ) kE0Cos ( t );
U Р2 kE0 ( Sin t Cos Cos t Sin ) kE0 Sin( t );
• где k – коэффициент трансформации, равный отношению числа эффективных витков роторной обмотки к числу
эффективных витков статорной обмотки.
184.
(б)а
α
C
Uc =E0 Sinωt
R
в
ZН
Рис 16. Схема фазовращателя на основе синусно – косинусного вращающегося трансформатора
185.
•Выходное напряжение определяется функциейU U p U p2 2kE0 Sin( t 4 )
1
• Видно, что поворот вала ротора на угол α вызывает соответствующее
изменение фазы выходного напряжения по отношению к поступившему на
U C1 E0 Sin t ;
статор
на величину 4 .
• Эта разность фаз определяет угол поворота ротора, созданную поворотом
вала кинематической пары.
• Для того, чтобы погрешность разности фаз входного и выходного сигналов не
превышала 0.1% необходимо обеспечение ортогональности напряжений,
подаваемых на статор. Фазовый сдвиг не должен отличаться от π/2 не более чем
на (3 – 5) минут , а разность амплитуд не должна превышать 0.5 процента.
При работе во втором режиме, когда для формирования выходного
напряжения используются фазосдвигающие цепочки, используется однофазовое
питание статора.
Схема датчика с одной фазосдвигающей цепочкой, представлен на рис. 13.
Такая схема обеспечивает получение регистрируемого на выходе сигнала, фаза
которого сдвинута по отношению к опорному сигналу на угол, совпадающий с
угловым отклонением вращающегося вала кинематической пары.
186.
Uc =E0 Sinωtа
в
α
0
0
Рис. 13.
C
R
ZН
Uвых
В этой схеме фазосдвигающая
цепочка состоит из конденсатора C
и сопротивления R , которые
выбираются из условий: емкостное
сопротивление xc 1 C R ;
сопротивление R значительно
больше общего сопротивления
обмотки ротора Z R
и значительно меньше
сопротивления нагрузки Z n.
При подаче на статорную обмотку напряжения U C1 E0 Sin t ; в обмотках ротора
наводится ЭДС:
p kE0 sin t sin ; q kE0 sin t cos .
где k- коэффициент трансформации
В соответствии с рассматриваемой схемой выходное напряжение с обмоток ротора (00) :
U r p q kE0 Sin t (sin cos ) 2kE0 cos( 4) Sin t.
Cos Sin 2Sin( 4 ) 2Cos( 4 ) }
{так как
Сила тока в этой цепи определится как отношение напряжения U r к общему
сопротивлению, которое в силу условий построения цепи равно сумме сопротивлений
фазосдвигающей цепочки.
187.
Соответственно падение напряжения на конденсаторе равно2kE0 cos( )
4 X sin( t ) kE cos( ) sin( t )
Uc
c
0
2
2
4
4
4
R Xc
Тогда падение напряжения на нагрузке, то есть выходной сигнал будет:
u
p Uc
вых
• После подстановки в это выражение значений напряжений и проведения
достаточно простых преобразований можно получить соотношение, в котором
угол поворота вала выражается через фазу получаемого сигнала. Измерение
фазы в этой модели позволяет получить значение определяемого угла поворота
вала.
u
вых
kE sin cos( t )
0
4
4
Отсчет изменения фазы берется от опорной фазы, в качестве которой
используется фаза Е0 или фаза выходного напряжения, снимаемого с другой
цепочки. В последнем случае разность фаз выходных напряжений цепочек
соответствует удвоенному значению измеряемого угла.
188.
• Погрешность большинства современных двухполюсных синусно-косинусныхвращающихся трансформаторов находится в пределах ± 0.005…0,2 %, а для вращающихся
трансформаторов, предназначенных для работы в качестве датчиков (приёмников)
трансформаторных систем дистанционной передачи угла ± (1…10) угловых минут.
• К прецизионным двухполюсным вращающимся трансформаторам относятся,
например, изделия типа ВТ-5 с погрешностью до ± 0.005% или ± 1 угловой минуты.
• В тех областях техники, где необходима погрешность, соизмеримая с долями угловых
минут и даже с единицами угловых секунд, используют многополюсные вращающиеся
трансформаторы.
• В них используется принцип электрической редукции. Коэффициент электрической
редукции обычно соответствует значению из ряда: 4; 16; 32; 64; 128; 256. Чаще всего
конструктивно они выполнены в виде отдельных узлов ротора и статора.
• Погрешность наиболее распространенных многополюсных двухотсчетных
вращающихся трансформаторов находится в пределах ± 10…30 угловых секунд.
189.
Характеристики одного из промышленных датчиков приведены втаблице.
Код
Тип
Uвх
f,
кгц
к
RВХ, ком
ε,%
Диаметр, мм.
Длина, мм.
МВТ- 2А
СКР
30
0.4
1
0.5,…,2.0
0.02
35
72
Масса,
кг.
0.3
Достоинствами индукционных датчиков являются их малые габариты, высокая
надежность и помехозащищенность, высокий уровень выходного сигнала и умеренная
стоимость.
До сих пор на основе этих датчиков строятся измерители углов разного назначения.
К их недостаткам можно отнести: необходимость симметрирования обмоток и
использования измерительных схем, высокие требования к точности сборки пакетов
магнитопроводов, что связано с обеспечением высокой точности, наличие щеточного
узла, зависимость точности от скорости вращения ротора, а также чувствительность к
изменению внешних факторов - температуры среды, частоты и амплитуды
напряжения возбуждения.
Все это требует разработки других измерительных схем и поиска более точных
решений.
190.
Цифровые кодирующие преобразователи угловых перемещений(КПУ).
• Кодовые датчики измеряют фактическое положение рабочего звена
манипулятора в установленной шкале измерительного устройства и
однозначно преобразуют результат измерения в код числа.
• Современные КПУ обеспечивают высокую разрешающую способность,
надежность и точность.
• В практике используются два типа КПУ: накапливающие преобразователи
(датчики приращений) и преобразователи абсолютных значений
(преобразователи считывания или абсолютные преобразователи).
• В первых используется датчик и счетная система, суммирующая отдельные
приращения, а также репер, т. е. значение относительно которого
отсчитываются приращения;
• во вторых - производится считывание абсолютных значений определяемой
величины.
• Накапливающие преобразователи, как правило, применяются с растровыми
преобразователями.
• В настоящее время находят применение три типа КПУ: контактные,
оптические и магнитные.
191.
Контактные кодирующие преобразователи угловых перемещений.• Как и у всех абсолютных КПУ основными блоками контактных КПУ являются:
кодирующий диск, изготовленный из проводника тока, и элементы считывания.
• Схема кодирующего диска с наиболее простой двоичной системой счисления
изображена на рисунке 18.
• Двоичная система счисления имеет основанием число 2. Для изображения чисел
используются две цифры 0 и 1.
• Десятичное число X в двоичной системе представляется в виде:
• X=xn2n + xn-12n-1 + … + x121 + x020 + x-12-1+ …+ xm2-m.
Тогда число 28.75 в двоичной системе может быть представлено:
11100,11=1*24+1*23 +1*22+ 0*21+ 0*20+1*2-1+1*2-2 =28,75
• В соответствии с принятой системой счисления создается кодовая маска, на
которой располагаются металлические концентрические дорожки. Они используются
для получения с требуемой точностью сигнала о перемещении звена (повороте вала)
непосредственно повернувшегося с валом диска.
• Разрешающая способность таких КПУ определяется количеством дорожек на
кодовом диске. Поскольку с удалением от центра разрядность удваивается, то
количество делений последней дорожки определяет цену деления диска. Так для диска
с десятью дорожками цена деления ~0.15'
192.
• Кодирующий диск контактного КПУ состоит из системы металлических пластинок,расположенных в заданном порядке в виде концентрических дорожек на диске,
изготовленном из диэлектрика, с заданными механическими и геометрическими
параметрами.
• Все металлические пластинки, расположенные на дорожках, имеют электрическое
соединение между собой. С источником питания они соединяются при помощи щетки,
которая контактирует с расположенным на диске замкнутым кольцом (дорожкой
питания), соединенным с источником питания.
• На диэлектрической пластине, жестко скрепленной с валом и расположенной вдоль
радиуса кодового диска, над каждой дорожкой располагаются щетки, осуществляющие
электрический контакт с металлическими пластинами дорожек. Каждая щетка имеет
отдельный вывод.
1
2
Рис. 18. Кодовый диск.
1 - Вал; 2 – Дорожка питания.
• При вращении диска, вызванном поворотом вала,
щетки, расположенные на этой пластине осуществляют
контакт с расположенными под ними металлическими
пластинками. При этом на них появляется напряжение,
из которого формируется выходной сигнал.
• Наличие напряжения на щетке соответствует
логической единице выходного сигнала.
• Отсутствие напряжения, что происходит при
контакте щетки с диэлектриком на дорожке диска,
соответствует логическому нулю.
• Простейшие из контактных КПУ для получения
информации используют электрический контакт между
считывающими устройствами (щетками) и элементами
кодирующего диска.
193.
• Это создает возможность устанавливать оптимальный уровень источника питаниядля каждой дорожки, и этим позволяет исключить применение переключающих
логических устройств.
• В простых КПУ с двоичной системой считывания для контакта с каждой дорожкой
используется одна щетка, то есть каждому разряду двоичного выходного сигнала
соответствует своя единственная дорожка.
• Основная погрешность отсчета определяется качеством изготовления датчика, то
есть диска и металлических пластинок.
• Как правило, эти погрешности устраняются на стадии отладки при обработке
копий. Металлические площадки создаются методом гальванического покрытия,
дорожки выполняются строго концентрически и строго перпендикулярно оси диска.
Щетки компануются в блок, который устанавливается с минимально допустимым
отклонением от требуемого положения относительно диска.
• Недостатки таких контактных КПУ с маской для двоичного счета проистекают из
принципа их действия.
• Существующее между дорожками диска и щетками трение сопровождается
искрением и образованием каверн, что порождает ошибки считывания и ограничивает
срок службы прибора.
• Кроме этого, при вибрациях датчика, которые возникают в реальных условиях,
щетки могут отрываться от дорожек, что приводит к искажению результатов
измерений.
194.
• Проблемы считывания. Двоичный КПУ на диске имеет такоерасположение металлических элементов, при котором из состояния контакта
(1) в обесточенное состояние ( 0 ) переходит одновременно несколько щеток.
• Например, в представленном на рис. 18 шестиразрядном КПУ в момент
времени t = t1(63), соответствующий коду 111111, происходит переход в код
000000, и при этом все щетки одновременно изменяют свое состояние.
• Осуществление такого изменения кода, даже при высокой точности
изготовления датчика, сопровождается появлением ложных кодовых
сигналов.
• Поэтому, для устранения таких явлений, вместо двоичного кода
используются циклические коды, в частности код Грея, в которых при любом
переходе изменяется только один разряд, хотя это и требует применения
дополнительных логических устройств. (Сдвиг на 3/4)
• Для обеспечения надежных контактов на каждой дорожке используются
двойные щетки, устанавливаемые специальным образом. (Подробнее в
разделе «Замечания»)
195.
Оптические кодирующие преобразователи угловых перемещений.• На базе оптических преобразователей создаются датчики линейных и угловых перемещений
объектов. Точности таких датчиков могут быть от 1 мкм до 1 мм при длине измерительной базы от 8
мм до 3 м. Датчики угловых перемещений могут иметь от 100 до 10000 маркеров на один оборот, т.е.
разрешение может быть до 5 минут.
• В настоящее время существует ряд классических способов построения энкодера - датчика,
представляющего информацию о движении, положении и направлении либо непосредственно в
цифровой форме, либо генерирующего последовательность импульсов, из которой после оцифровки
может быть сформирован цифровой код.
• Абсолютные датчики углового положения каждому значению углового положения вала
(преобразуемого угла) ставят в соответствие значение числового эквивалента, который формируется
на выходе датчика, как правило, в виде сигнала цифрового кода. При этом указанное взаимно
однозначное соответствие сохраняется, как при движении вала, так и при его неподвижном
положении и не требует возвращения вала в начальную позицию.
• В основе принципа действия таких датчиков лежит анализ позиционного сочетания уровней
сигналов дискретных фотоприемников, располагаемых в формируемой светотеневой картине
соответствующих концентрических кольцевых кодовых дорожек или на одной дорожке (в случае
однодорожечного кода).
• Совокупность указанных фотоприемников образует считывающее фотоприёмное устройство
(матрицу считывающих фотопремников), конкретное выполнение которого определяется
структурой используемого кода и конструкцией датчика.
• В абсолютных датчиках углового положения увеличение количества кодовых разрядов
соответствует увеличению их угловой разрешающей способности.
196.
В состав оптического КПУ входят:
а) источник света;
б) оптическая система для формирования пучка света, содержащая диафрагму;
в) кодирующий диск;
г) линейка фотоэлементов, размещаемая параллельно радиусу кодирующего диска или фототранзисторная
матрица.
В качестве источника света используются лампы с вольфрамовой нитью или твердотельные
светоизлучающие приборы (светодиоды), лучи которых просвечивают кодовый диск и попадают на линейку или
фототранзисторную матрицу, расположенную с обратной стороны кодового диска.
• Кодирующий диск представляет собой стеклянное
основание, на которое нанесена кодовая маска,
представленная определенным числом кодовых дорожек с
прозрачными и непрозрачными для светового потока
сегментами. Маска изготавливается фотоспособом;
контактной печатью с диска - эталона, на котором
радиальные линии наносятся с погрешностью до 0.067
секунды.
Вал
Рис. 19. Кодовый диск с двоичным кодом.
• Диски изготавливаются с двоичным кодом, кодом
Грея, циклическими кодами, логарифмическими двоично
– десятичными кодами и др. Наиболее широко
используется отраженный двоичный код Грея, требующий
минимальное число фотоприемников и обеспечивающий
простую оптическую схему считывания. Для того чтобы на
выходе датчика был двоичный сигнал применяется
система преобразователей.
197.
На рис. 20 изображен диск с кодом Грея и таблица иллюстрирующаясоответствие десятичного, двоичного кодов и кода Грея. Видно, что код Грея
позволяет устранить погрешности, возникающие при использовании дисков с
двоичным кодом.
Рис. 20
198.
Измерительная система промышленного абсолютного энкодера состоит:из поворотной оси, смонтированной на двух высокопрецизионных подшипниках;
кодового диска, закрепленного на этой оси:
опто-электронной считывающей матрицы и
схемы обработки сигнала.
Источником света служит светодиод, инфракрасные лучи которого просвечивают
кодовый диск и попадают на фототранзисторную матрицу, расположенную с обратной
стороны кодового диска.
В процессе получения информации световой поток, сформированный оптической
системой, падает на кодирующий диск. При каждом шаге углового положения кодового
диска темные участки дорожки кода предотвращают попадание света на
соответствующие фототранзисторы фототранзисторной матрицы. Темные и- светлые
участки каждой из дорожек будут отображены на фототранзисторной матрице и
преобразованы в электрические сигналы.
В качестве приемников световых импульсов, проходящих через прозрачные
элементы дорожек диска, используются фотодиоды, которые преобразовывают их в
электрические сигналы.
Электрические сигналы, в свою очередь подготавливаются операционными
усилителями и выходными трайберами для выдачи в виде бит бинарного сигнала. Эти
импульсы, создают сигналы, соответствующие логическим нулям от неосвещенных и
логическим единицам от освещенных фотодиодов.
• Общая схема оптического КПУ приведена на рисунке 21.
199.
На нем 1 – кодирующий диск, жестко скрепленный
с валом (2), угловое положение которого измеряется.
При этом измерении угловое положение вала
преобразуется в цифровой код.
3 –это осветитель, исполняемый в виде лампы или
светоизлучающих полупроводниковых диодов или
других, пригодных для этих целей источников света.
4 – конденсор, формирующий световой поток,
необходимой формы и интенсивности. Как правило, это
параллельный пучок света, для создания которого
используются коллиматоры.
5 - щелевая диафрагма, ограничивающая ширину
пучка света, падающего на фотоприемники (6).
Фотоприемники (6) – это кремниевые фотодиоды.
При нагрузке в 10 ком. на выходе создается
электрический сигнал с максимальным напряжением
20 - 40 мв.
Для формирования логических сигналов нужного
уровня электрический сигнал с фотодиода подается на
усилитель, где увеличивается и преобразуется к нужной
форме.
Полученный сигнал поступает в систему
управления.
Рис.21. Фотоэлектрический преобразователь
считывания угол – код
200.
• На рис.22 показано функционирование оптического КПУ• Осветитель и конденсор ( на рисунке это газоразрядная лампа ) создают
плоскопараллельный пучок света, который пройдя ограничивающую щелевую
диафрагму, попадает на кодирующий диск.
• Последний занимает в выбранной системе координат положение, задаваемое ему
валом. Это положение в плоскости светового потока характеризуется соответствующим
единственным набором прозрачных и непрозрачных участков.
• Та часть пучка света, которая проходит прозрачные участки, попадает на
расположенные под ними фотоприемники и порождает электрический сигнал, который
после усиления превращается на выходе в логическую единицу.
• Фотоприемники, расположенные под непрозрачными элементами не создают
сигналов, что на выходе датчика соответствует логическому нулю
Рис. 22. Прохождение светового потока через приборы датчика.
• Каждому положению вала соответствует угловое положение диска, характеризуемое
единственной комбинацией единиц и нулей, являющаяся цифровым кодом данного угла.
Достоинством такого преобразователя является высокая разрешающая способность. Так при 12
разрядах цена деления 5 минут, а при 16 – только 20 секунд.
201.
На рисунке представлен разрез используемого в промышленности энкодера.202.
Основные характеристики оптических КПУ приведены в ниже расположеннойтаблице.
Серия
Диапазон
двоичных
растров
Погрешность в
сек.
Размеры в мм.
Масса в гр.
ППК - 15
15
8
200*60
800
ROC 717
17
0.2
90*134
600
TSI - 200
20
0.5
150*75
400
203.
Магнитные кодирующие преобразователи угловых перемещений.• Магнитные КПУ состоят из кодирующего диска и системы считывания. Кодирующий
диск, по форме и структуре аналогичный ранее рассмотренным ранее оптическим КПУ,
покрывается ферромагнитным материалом.
• Код на диске, как правило, формируется магнитной структурой, предварительно
записанной на диск в процессе его изготовления.
• Другой метод предполагает изготовление диска из специального материала, после
травления которого на диске в виде дорожек сохраняется система выступов, определяющих
заданный код, в котором намагниченная область (выступ) соответствует логическому нулю,
а не намагниченная – логической единице.
• На линейке, расположенной над диском вдоль его радиуса, над каждой дорожкой
размещаются головки считывания – небольшие тороидальные электромагниты, обмотки
которых воспринимают наличие или отсутствие магнитного поля в рабочей зоне под ними.
• Каждый тороидальный электромагнит имеет две обмотки. Одна из них, называемая
обмоткой считывания регистрирует наличие или отсутствие магнитного поля под тором,
но сигнал на ней появляется только тогда, когда вторая обмотка, называемая обмоткой
опроса, возбуждена.
Схема расположения головок считывания над одной из дорожек приведена на рис. 16.
204.
• На обмотку опроса подается электрическийсигнал постоянной амплитуды с частотой 200
килогерц.
• Вследствие этого на обмотке считывания
возникает электрический сигнал с частотой
200 килогерц, амплитуда которого
определяется отношением витков обмоток
тора и магнитным полем в его сердечнике.
• Напряженность этого поля зависит от
положения головки над диском.
• Если головка полностью расположена над
полем, ( рис. 16а) то магнитная цепь
насыщена. Поэтому магнитное поле,
создаваемое обмоткой возбуждения ,
практически не изменяет существующее
насыщенное магнитное поле и выходное
напряжение с обмотки считывания мало.
• Если же головка находится вне поля,
создаваемого выступом дорожки, то она
работает как трансформатор и поскольку
магнитная поток создается только током
обмотки возбуждения, то выходной сигнал
достаточно велик. (рис.16 (б))
Обмотка
выхода
Обмотка
опроса
(а)
1.2
1.21.2
(б)
ff1(( xx
) )0
0
1.21.2
0
20
(в)
0
f1( x)
1.2
f0( x)
0 40
1.2 1.2
20 0 4020
x 0
31.416
x
31.416
0
x
0
0 40 20
40
0
x
31.416
31.416
Рис. 16.Схема считывания.
205.
• Таким образом, сигнал частотой 200 килогерц на выходнойобмотке имеет амплитуду, модулируемую в соответствии с
величиной намагниченности участка дорожки над которой
находится головка считывания: если участок намагничен, то
амплитуда мала, что соответствует логическому нулю;если
участок размагничен, то выдается сигнал высокого уровня, что
соответствует логической единице.
• Сигналы с обмоток считывания (выхода) каждой дорожки
детектируются и формируются в прямоугольные импульсы (рис.
16 в), которые представляют соответствующие значения (0 или1)
на панели результатов.
• Магнитные кодирующие преобразователи угловых
перемещений обладают высокой надежностью и достаточно
высокой точностью.
• Однако, они являются наиболее дорогостоящими.
206.
Фотоэлектрические растровые преобразователи.• Лат. rastrum – грабли. Другое определение - поверхность с чередующимися
прозрачными и непрозрачными элементами (решетка) для структурного преобразования
направленного на нее пучка света ( растровая оптика). В дальнейшем мы будем
использовать термин, используемый в растровой оптике.
• Растр – это решетка, построенная на прозрачной для светового потока пластине,
состоящая из подобных друг другу элементов, образующих периодическую структуру,
предназначенную для структурного преобразования направленного на нее светового
пучка.
• В зависимости от характера воздействия на этот пучек растры классифицируются как
• прозрачные, представляющие систему чередующихся прозрачных и непрозрачных
элементов, и
• отражательные, представляющие решетки с элементами зеркально отражающими
или поглощающими (рассеивающими) свет.
• Геометрически структура решеток растра может быть разнообразной.
• Растры, выполненные в виде решеток правильной геометрической структуры,
называются регулярными, неправильной – стохастическими (хаотическими).
• Растр называется
• линейным, если его элементы представляют ряд параллельных прямых линий;
• радиальным, если его элементы расходятся в виде лучей из одного центра;
• кольцевым, если его элементы – концентрические кольца.
• Некоторые типы растров представлены на следующем слайде
207.
208.
• Элементы растра могут быть образованы пересечением под разными углами линейныхрастров, составлены из шестиугольных элементов, располагаться в шахматном порядке( в
виде шахматной доски) и т. д.
• Линейные растры, у которых ширина просвета равна ширине штриха называются
симметричными.
• Основные оптические характеристики растров:
• Период (или шаг) t – расстояние между осями двух смежных элементов, измеряемое
вдоль прямой перпендикулярной к оси симметрии растра;
t
а
• Светосила (пропускание растра) – отношение ширины
• просвета растра к его периоду.
• Растровое сопряжение создается наложением друг на
• друга с малым зазором между ними двух пластин с
• растровыми решетками.
• При этом темные штрихи одного растра, передвигаясь
• относительно прозрачных полос другого изменяют
• прозрачность сопряжения.
• В результате возникают темные и прозрачные участки сопряжения, которые образуют
легко различимые полосы, называемые комбинационными или муаровыми.
• Положение, форма и геометрические параметры комбинационных полос
определяются параметрами сопрягаемых растров.
209.
Для измерения линейных перемещений используются сопряжения плоских
параллельных растров, для измерения угловых перемещений - сопряжения плоских
радиальных растров, которые бывают как центральными, так и нецентральными.
Фотоэлектрические растровые преобразователи линейных и угловых
перемещений характеризуются высокой разрешающей способностью.
Основными элементами фотоэлектрического растрового преобразователя
являются
1. блок осветителя, состоящий из источника света и оптической системы,
формирующей параллельный пучок света,
2. растровое сопряжение, компонуемое из подвижного измерительного и
неподвижного индикаторного растров,
3. блок фотоприемников
210.
Схемы фотоэлектрических растровых преобразователей.• Растровое звено, работающее в проходящем свете и используемое для преобразования линейных перемещений
звена манипулятора в электрический сигнал, представлено на рисунке 19 (а).
• Основными элементами этого фотоэлектрического растрового преобразователя являются:
• блок осветителя, состоящий из источника света (1) и оптической системы (2), создающей параллельный пучок
света,
• растровое устройство, состоящее из подвижного измерительного (4) и неподвижного индикаторного (3) растров,
• блок фотоприемников (5) (ФП 1 –ФП 4), преобразующих оптические сигналы в выходные
– электрические, поставляющие необходимую информацию.
Рис. 19.
211.
Источник света 1 с конденсором 2 , индикаторный параллельный растр 3 и блок фотоприемников ФП1 - ФП4
закрепляются на опорных деталях манипулятора, а измерительный параллельный растр скрепляется с подвижным
звеном, перемещение которого контролируется. При перемещении звена манипулятора скрепленный с ним
измерительный растр движется в направлении x и модулирует световой поток, проходящий через сопряженные
растры. Это изменение светового потока фиксируется фотоприемниками ФП1 - ФП4 .
Ф Ф0
Модулирующие возможности растрового сопряжения характеризуются значением пропускания светового
потока где
и
соответственно значение светового потока, падающего на растровое сопряжение и
прошедшего через него вФ
границах
Ф эффективного зрачка фотоприемника. Пропускание растрового сопряжения
0
изменяется в зависимости от относительного смещения индикаторного и измерительного растров.
При использовании растров с соответствующими параметрами можно обеспечить синусоидальный характер
изменения пропускания светового потока
для каждого из четырех фотоприемников:
где
0
- постоянная
iглубины
1,2,3,модуляции;
4,
{составляющая
1 mSin[ пропускания;
( / 2)(mi – коэффициент
1)],
- пространственная фаза комбинационной полосы,
0
измерительного растра в пределах шага растра
.
- относительное линейное смещение
х
• При
( 2
/ t) x
измерении на каждый фотоприемник поступает световой поток, сдвинутый по пространственной фазе
t
на
рад относительно потока на предыдущем фотоприемнике.
Если фотоприемники включать попарно через один, т. е. ФП1 с ФП3 и ФП2 с ФП4 по балансной схеме, то на
/ 2 пар будет образовываться два сигнала синусоидальной формы
выходах балансных
и
, сдвинутых по пространственной фазе на
перемещении .
U1
U11
рад. и несущих информацию об измеряемом
/2
212.
От фотоприемников балансных пар синусоидальные сигналы
• / 2 поступают в формирователи
перемещений.
и
Ф1
и U , сдвинутые
по фазе на
U
1
11
, с помощью которых формируются сигналы о величине
Ф2
• Аналогичную информацию можно получить об угловом перемещении
с блока фотоприемников растрового
преобразующего звена с сопряжением радиальных растров, представленного на рис. 19 (б).
• В этом случае вал звена манипулятора, угол которого нужно измерить, жестко скрепляется с измерительным
радиальным центральным растром 5. Индикаторный растр 3 также является радиальным растром. При
прохождении светового потока через сопряженные растры 5 и 3 образуются муаровые комбинационные полосы,
которые фиксируются фотоприемниками. Для представленной на рисунке схемы растрового преобразующего звена
пространственная фаза комбинационной полосы определяется соотношением:
(2 / t )
где
- относительное угловое смещение измерительного радиального растра в пределах шага этого растра.
• На рисунке 19 (в) приведена схема растрового преобразующего звена с отражающей растровой решеткой 6.
Отражающая растровая решетка наносится на ленту или пластину, изготовленную из коррозионно – стойкой
стали. Световой поток от источника света 1, сформированный конденсором 2 проходит через индикаторный растр 3
на решетку 6, отражается от нее, снова проходит растр 3 и попадает на фотоприемники ФП1 - ФП4 .Оси падающего
и промодулированного отраженного пучков света находятся в плоскости, нормальной к плоскости измерительного
растра и параллельной штрихам индикаторного растра. Отражающие решетки на металлической основе
позволяют создавать надежные датчики даже для измерений больших перемещений. Кроме того, для таких схем
изменение температуры окружающей среды меньше влияет на точность измерений, поскольку измерительную
шкалу можно делать из металла , близкого по характеристикам к металлу, из которого сделаны детали
манипулятора.
• С выходов фотоприемников растрового звена с отражающей растровой решеткой , как и в предыдущих схемах,
снимаются сигналы синусоидальной формы со сдвигом по пространственной фазе на
рад.
/2
213.
• При перемещении измерительной растровой решетки в одном направлении первый квадратурныйсигнал
, создаваемый
фотоприемников ФП1 и ФП3, отстает на четверть периода от второго
Uпарой
1
U11
квадратурного сигнала
, создаваемого парой фотоприемников
ФП2 и ФП4, а при перемещении в
противоположном направлении – второй квадратурный сигнал отстает от первого также на четверть
периода. Таким образом, знак фазового сдвига характеризует направление перемещения измерительного
растра.
• В результате на выходах формирователей
и Ф1 образуются
четыре прямоугольных сигнала
Ф2
/2
напряжения, каждый из которых сдвинут относительно предыдущего по фазе на
.
• Синусоидальные сигналы, как правило, преобразуются в прямоугольные и в результате измеряемое
перемещение представляется последовательностью однородных прямоугольных импульсов, причем
каждый прямоугольный импульс соответствует перемещению измерительного растра на один шаг
.
t
Число импульсов подсчитывается электронным
счетчиком.
• С помощью такого простого накапливающего устройства , в котором непосредственно
отсчитываются периоды (шаги ) измерительного растра обеспечивается разрешающая способность в
несколько микрометров, причем в качестве сопрягаемых растров используются дифракционные
решетки. Применение дифракционных решеток с очень мелким шагом ограничено в связи с тем, что
шаг решетки становится соизмерим с длинами волн используемого светового потока, ограниченной
полосой пропускания фотоприемников и удорожанием решеток. Для повышения разрешающей
способности, в основном используются различные способы дробления шага сопрягаемых растров на 4 –
20 частей.
• На рис. 20 приведена схема и диаграммы работы счетной части накапливающего преобразователя с
реверсивным счетчиком. Такой преобразователь позволяет получить чеыре импульса на каждую
муаровую полосу.
214.
С фотоприемников синусоидальные сигналы
и1
, сдвинутые
по фазе на
на
U
U
поступают
/2
11
формирователи Ф1
и Ф,2каждый из которых имеет два выхода. С одного из них снимается прямоугольный импульс с
той же фазой, что и соответствующий синусоидальный сигнал, а с другого - с фазой сдвинутой по отношению к первому
на
.
В результате на выходах формирователей образуются четыре прямоугольных сигнала напряжения
сдвинутые по фазе каждый относительно предыдущего на
. Эти
/ 2сигналы служат для управления блоком реверса
счетчика полос.
Для формирования импульсов сложения используются четыре схемы совпадения
A, B,,сAвыхода
, B которых
сигналы поступают на схему собирания
Для
формирования
импульсов вычитания используются схемы
И1
И4
И
5
И
8
совпадения
, С выхода этих схем импульсы подаются на
и
.
ИЛИ1
ИЛИ2
Все схемы совпадений имеют два входа:
потенциальный и импульсный. На потенциальные
A, B, A , B–
входы подаются
,а на импульсные
импульсы
, полученные
a, b, a , b
дифференцированием положительных фронтов
прямоугольных напряжений
дифференцирующими цепочками
.
Д1 Д 8
На диаграмме видно, что при движении решетки в
направлении + X на реверсивный счетчик РСч
поступают сигналы сложения
a * B вb обратном
* A a * Bнаправлении
b * A.
а при Vдвижении
–
сигналы вычитания
R a*B b* A a *B b * A
Рис. 20.
215.
• Датчики для измерения линейных перемещений.• Датчики перемещений кодового типа используются также для измерения линейных перемещений.
• В практике часто поступательное движение контролируемого звена преобразуется во вращательное движение
измерительного механизма посредством сочленения: рейка – шестерня или гайка – ходовой винт. Например, в
токарном станке вращение ходового винта вызывает перемещение гайки, с которой жестко скреплен резец,
используемый для обработки детали. Если ходовой винт использовать как вал кодового диска, то положение резца
на валу определится числом импульсов на выходе кодирующего преобразователя накапливающего типа;
считывается число полных оборотов и промежуточное значения.
• Также используется система с линейкой. На рис. 17 представлена система с четырьмя дорожками измеряет
движение резца вперед и назад с погрешностью 0,003мм на базе в 1м.
• Основным элементом линейных кодовых преобразователей (ЛКП) является длинная плоская линейка, на
которую наносится кодовая маска с дорожками, определяющими разряд кода. Схема такой линейки с четырьмя
дорожками изображена на рис.17..
• В рабочем режиме она перемещается вместе с исследуемым звеном. Располагающаяся над ней сканирующая
головка служит для фиксации положения звена.
• Рис.17.Кодовая линейка для измерения линейных перемещений..
• Устройство датчика и методика измерений остаются такими же, как в КПУ, изменяются только кодовые диски.
216.
Принцип действия преобразователей линейных перемещений•В основу работы преобразователей перемещения положен метод оптоэлектронного сканирования
штриховых растров. При относительном перемещении измерительной шкалы 1 и индикаторной
(анализатора) 3 сопряжения регулярного растра, шкалы с растрами анализатора модулируют
проходящий через них поток излучения, воспринимаемый соответствующими фотоприемниками.
Растровая шкала содержит две параллельные
информационные дорожки:
регулярного растра и референтных меток.
• Растровый анализатор содержит 4 окна А, А, В, В
инкрементного считывания и окно референтной
метки Б. Эти 4 окна позиционно согласованы
с дорожкой регулярного растра шкалы.
• Шаги растров в окнах равны шагам регулярного
растра шкалы (20 мкм или 40 мкм). При этом в
каждой паре окон растры смещены друг
относительно друга на величину, равную половине
их шага, а взаимный пространственный сдвиг
растров между парами окон составляет четверть
шага растров.
•Последовательно с растровыми окнами
•расположено прозрачное окно Г.
•Референтная метка Б позиционно согласована с дорожкой референтных меток шкалы.
•Считывающий узел (считывающая головка) преобразователя перемещений решает задачу
реализации оптических растровых и кодовых сопряжений, информативно соответствующих
величине линейного перемещения, а также задачу считывания, обработки и анализа текущих
значений оптически информативных параметров указанных сопряжений.
217.
Для рассмотренной схемы при перемещении измерительной решетки на один шаг насчетчик подаются четыре импульса,
• Следовательно, накапливающее устройство имеет разрешающую способность в 1/ 4
шага растра.
• С помощью существующих линейных и цифровых интегральных схем формируются
растровые накапливающие преобразователи с делением шага на восемь,
удовлетворяющие всем требованиям по точности измерений и надежности работы.
• Существуют и другие способы повышения разрешающей способности
фотоэлектрических преобразователей.
• Так введением дополнительного растрового отсчета получают разрешающую
способность 0.6 – 1.2 секунды при внешнем диаметре кодового диска больше 127 мм.
218.
Муаровый эффект.• Рассмотрим прозрачную стеклянную пластинку с нанесенной на ней шкалой
равноотстоящих друг от друга параллельных штрихов. Будем называть такую
пластинку растровой пластинкой (Рис. 17).
• Растровое сопряжение получается при наложении растровой пластины В с
параллельным растром на такую же пластину А с малым зазором между растровыми
пластинами.
• Если пластину В находящуюся сверху, повернуть на малый угол γ относительно
направления штрихов на пластине А, то штрихи растров пересекутся (Рис. 18)
• Если точки пересечения штрихов соединить прямыми линиями, то эти линии будут
биссектрисами углов пересечения растров.
• Между этими линиями штрихи прозрачной пластины В закрывают промежутки
между штрихами пластины А, создавая темные полосы, параллельные биссектрисам.
Эти темные полосы называются «муаровыми».
• Легко проверить, что с увеличением угла γ растет количество «муаровых» полос и
уменьшается расстояние между ними.
• В общем случае для произвольных растров«муаровые» полосы не имеют четких
границ, поэтому зафиксировать их оси достаточно сложно.
• Но для симметричных прямолинейных растров, у которых ширина
просвета между штрихами равна ширине штриха, ось «муаровой»
полосы является прямолинейной и совпадает с биссектрисой
угла пересечения штрихов двух однотипных растров.
• В дальнейшем рассматриваются только такие растры (Рис. 17).
• Обозначим шаг решетки t, толщину штриха а, расстояние
между осями смежных «муаровых» полос T. Тогда для прямолинейных
симметричных растров шаг t = 2a , светосила W = a/t.
t
a
Рис. 17
T
Рис. 18
219.
• Следовательно, шаг «муаровых» полосT = t/[2Sin( γ/2)]
(1)
или при малых углах γ
T=t/γ.
• Из (1) видно, что величина шага «муаровых» полос очень чувствительна к изменению угла γ .
• Например, при t = 1; γ = 10 = 0.0174 рад, T = 57, а при t = 1; γ = 20, T = 28.5 .
• Такая высокая чувствительность позволяет использовать «муаровый» эффект для высокоточных
измерений малых промежутков и перемещений.
• Если для измерений используются пластины с параллельными
• растрами разных шагов t и t1, то шаг «муаровых» полос T будет:
t t1
T
2
t12имеют
2tразличную
t1Cos ширину.
В этом случае «муаровые»t полосы
Углы наклона осей «муаровых» полос к линиям растров определяются
формулами
t Sin
Sin
t 2 t12 2t t1Cos
t1 Sin
Sin 1
t 2 t12 2t t1Cos
Отсюда следует, что изменением шагов растров можно изменять направление
«муаровых» полос.
Это обстоятельство используется для уменьшения ошибки визирования.
T
Рис. 18 (а)
220.
При сопряжении 2-х параллельных линейных растров с одинаковыми шагами большое значение имеет
соотношение штрихов и размеров между ними, Экспериментально установлено, что наилучшее соотношение
соответствует растрам, у которых толщина штрихов в два раза меньше ширины просветов между ними. Если а –
толщина штрихов, а в – ширина просветов, то это соответствует:
a 1 3 * t;
b 2 3 *t.
Для получения наилучшей контрастности «муаровых» полос ширина штрихов второго растра и просветов
между ними должна быть
b1 1 3 *t;
a1 2 3 * t;
то есть второй растр должен быть негативом первого.
Если расположить штрихи первой растровой пластинки вертикально, а второй, имеющий тот же шаг t,
наклонно, под углом γ по отношению к штрихам 1-ой пластинки, то получится картина «муаровых» полос. Если 1ую пластинку переместить в направлении перпендикулярном штрихам на один шаг t, то «муаровые» полосы
переместятся на шаг T. Измеряя T , можно с более высокой точностью определить величину перемещения
пластинки, равную t.
Рис. 20. Фотографии муаровых полос
221.
Применение муарового эффекта.• Для определения величины взаимного перемещения двух объектов рассмотрим процесс преобразования
«муаровых» полос.
• Для этого соединим две растровые пластинки А и В с одинаковыми линейными растрами,
расположенные вертикально В над А, осью, расположенной в нижнем левом углу, вокруг которой можно
поворачивать пластинку В относительно А.
• При повороте пластинки В на 3 шага относительно А , в силу того, что «муаровые» полосы появляются
посредине между 2 – мя смежными пересекающимися растровыми штрихами возникнет картина,
содержащая 3 «муаровых» полосы. Следовательно, перемещение точки М, принадлежащей пластинке В,
на 3 шага растра А вызовет появление 3 - х «муаровых» полос.
• Тогда величину перемещения т. М перпендикулярно штрихам пластинки А можно определить, как L = t
N,где N – количество «муаровых» полос.
а
t
222.
Датчики динамических величин.223. Применение муарового эффекта.
Датчики динамических величин.Датчики динамических величин (ДДВ) - это информационные устройства, преобразующие
изменение динамических факторов: силы, ускорения, давления - в изменение электрического сигнала.
Датчики этого типа применяются в различных системах контроля и диагностики.
Основные задачи решаемые с их помощью:
1.
контроль параметров натяжения всевозможных лент и полос,
2.
измерение сил на валках клетей прокатных станов,
3.
предохранение от перегрузок в подъемных механизмах и транспортных средствах,
4.
контроль весовых и инерционных характеристик различных объектов.
ДДВ в робототехнике используются для регулирования величины момента силы на валу
привода или ускорения выходного вала, а также для реализации законов управления звеньями
исполнительного механизма.
ДДВ классифицируются по четырем основным признакам:
1.
По назначению: датчики систем управления (это измерители момента/силы на валу и давления
в магистрали, акселерометры) и датчики контроля (в основном контроля технологических параметров
и параметров безопасности).
2.
По физическому принципу преобразования: пьезоэлектрические, магнитоупругие,
тензометрические (омические), электродинамические, емкостные и индуктивные.
3.
По способу создания противодействующей силы: датчики совмещенного преобразования
(содержат электрически активный упругий преобразователь, реакция которого создается упругочувствительным элементом), датчики раздельного преобразования (включают электрически
неактивный упругий преобразователь) и датчики с силовым уравновешиванием (сила реакция
создается электрическими способами).
4.
По виду выходной величины: генераторные («активные», выходной сигнал определяется
величиной заряда,, напряжения или тока) и параметрические («пассивные», с выходным сигналом в
виде изменения сопротивления, индуктивности и емкости).
224.
Силомоментные преобразователи.Силомоментные преобразователи адаптивных роботов – это технические средства для измерения главного
вектора сил и моментов, действующих на рабочий орган манипулятора, в проекции на связанную с датчиком систему
координат.
• Они размещаются либо непосредственно в губках захвата, либо между последним звеном манипулятора и захватом.
Последнее осуществляется тогда, когда в процессе работы необходимо автоматически заменять рабочий орган (захват).
Кроме высокой точности, надежности, большого ресурса эти датчики должны иметь:
1. Малую массу и небольшие габариты, чтобы размещаться в губках захвата или его кисти, не оказывая
существенного влияния на их массовые характеристики: массу и моменты инерции.
2. Большую жесткость, обеспечивающую высокую резонансную частоту и снижающую влияние упругих
деформаций датчика на точность позиционирования захвата.
Замечание. Жесткость – это способность тела или конструкции сопротивляться образованию деформации. Если
материал тела или конструкции подчиняется закону Гука, то характеристикой жесткости при растяжении, сжатии и
изгибе является модуль упругости (Юнга) Е. Жесткость при растяжении, сжатии стержней численно характеризуется
произведением Е S, где S – площадь поперечного сечения. Если на объект действует сила F как показано на рис 21, то
жесткость W:
W = F/δ; δ = Lσ/E; σ = F/S; или W =ES/L ,
F
F
где δ – абсолютная деформация.(ε = σ/E).
S
3. Минимальный уровень перекрестных связей
L
между каналами различных компонент вектора сил.
Рис. 21. К определению жесткости.
225.
4, Высокую линейность и отсутствие гистерезиса;5. Число измеряемых проекций вектора сил и моментов должно обеспечивать выполнение
роботом планируемых технологических операций.
• Характеристики датчика должны соответствовать параметрам системы управления промышленного
робота. Требование высокой жесткости ограничивает выбор чувствительных элементов, служащих
преобразователями сил в электрический сигнал и соответствующего быстродействия (высокого) привода
манипулятора, так как при столкновении захвата, даже движущегося с небольшой скоростью, с объектом
манипулирования скорость нарастания силы или момента может оказаться выше предельных динамически
характеристик приводов. При этом либо датчик, либо манипулятор могут выйти из строя.
• Требование высокой линейности связано с ограниченным числом уровней квантования при
преобразовании аналогового сигнала датчика в цифровой.
• Преобразование сил, возникающих при контакте захвата с объектом манипулирования, в электрический
сигнал осуществляется двумя способами:
1.
Непосредственным измерением упругих деформаций преобразователя, что производится
тензорезисторными, пьезоэлектрическими, магнитоупругими датчиками;
2.
Измерением микроперемещений калиброванных пружин преобразователя , деформирующихся при
взаимодействии захвата с объектом манипулирования, что производится электрическими, магнитными,
оптическими датчиками.
• Конструкция механической части датчика должна быть достаточно простой и и обеспечивать простую
систему выделения необходимых значений векторов сил и моментов.
• При решении задач о взаимодействии захвата или рабочего органа с объектом, необходимо определить
результирующую силу реакции со стороны объекта, то есть точку приложения силы, ее величину и
направление.
226. Силомоментные преобразователи.
• Для управления манипулятором необходимо анализировать текущие значения физических величин,измеряемых в системе координат, связанной с роботом. Взаимодействие захвата робота с объектом
характеризуется 6 – ю параметрами: X0 (P) , Y0 (P), Z 0(P), FX, FY, FZ –- то есть координатами т. P и составляющими
силы F. Для получения информации о них необходимо иметь датчик, определяющий положение т. P( X0, Y0, Z0 ) и
датчик, определяющий три компоненты вектора F.
F
MY
y0
FZ
FY
FX
P
о
MZ
z0
MX
x0
• В зависимости от решаемой задачи и используемых датчиков
способы решения задач различны.
Если известны все три компоненты силы F: FX, FY, FZ и моменты,
создаваемые ею относительно осей координат (рис. 22), то,
используя формулы для определения составляющих момента:
МX= FY X0 – F ZY0; МY= FZ X0 – FX Y0; МZ= FX X0 – FYY0,
• по известным F и M можно найти X0 , Y0, Z0.
• Следует только иметь в виду, что в силу того, что справедливо
соотношение
• FXMX +FYMY+FZMZ =0,
• то по известным F и M можно определить только две
координаты. Третья координата (например высота), как правило,
задается.
Рис.22.
• Очевидно, что взаимодействие захвата робота с объектом определяется соотношением, в котором величина силы
зависит от координаты точки ее приложения. Управление манипулятором производится по значениям сил, при
изменении которых изменяется точка приложения равнодействующей. Такое управление возможно только при
оснащении робота силомоментными датчиками.
• Силомоментные датчики классифицируют по двум признакам: по способу преобразования измеряемого
воздействия в электрический сигнал и по способу выделения измеряемых проекций сил и моментов.
• В зависимости от выбранного способа преобразования измеряемого силового воздействия в электрический сигнал
используются тензорезисторные, пьезоэлектрические, магнитоупругие и другие датчики.
227.
• Способ выделения измеряемых сил и моментов связан с выбором общих характеристик датчиков.Наиболее часто используются конструкции, в которых выделение компонент силового вектора производится
непосредственно в самом датчике, за счет соответствующего расположения преобразователей.
На рисунке 23 представлена конструкция шести компонентного датчика, представляющая систему двух
кольцевых фланцев (2), соединенных 3 – мя упругими элементами (4), расположенными параллельно оси
конструкции на расстоянии 1200 друг от друга.
• На внутренней стороне этих упругих элементов
размещены фольговые тензорезисторы (3), регистрирующие
деформации растяжения – сжатия элементов, а на внешней
стороне помещены фольговые тензорезисторы (1),
измеряющие сдвиговые деформации.
• Три пары тензорезисторов, закрепленных на упругих
элементах ,регистрируют все возможные деформации,
возникающие в упругих элементах под действием
произвольно приложенных к одному из фланцевых колец сил
и моментов.
• Особенность этого датчика состоит в том, что он всегда
предназначен для измерения всех шести проекций силового
вектора и не может быть использован для определения
другого числа компонент, поскольку каждый тензоэлемент
датчика деформируется при любых, прилагаемых к фланцам
силах.
Рис. 23.
• Для выделения проекций вектора сил и моментов, зарегистрированных датчиком, производится
предварительное тарирование, проводящееся под действием сил и моментов, моделирующих силы и
моменты , действующие на датчик в реальных условиях.
228. Для управления манипулятором необходимо анализировать текущие значения физических величин, измеряемых в системе координат,
Процесс происходит следующим образом. К датчику поочередно по каждой координате прикладывается сила F,
заданной величины. На выходе измерительного прибора регистрируется электрический сигнал S
пропорциональный величине деформации, вызванной этой силой. Поскольку процесс тарирования происходит в
пределах упругих деформаций, при которых выходной электрический сигнал линейно связан с деформацией,
то
связь между векторами сил и выходных электрических сигналов
является линейной и представляется
F
S
соотношением
S WF
,
в котором W – прямоугольная матрица с постоянными элементами.
Полученные результаты тарирования используются для определения значений составляющих действующей на
датчик силы F по зарегистрированным значениям выходного электрического сигнала S. Для этого производится
обратное преобразование, т. е. решается уравнение
T
1
T
F (W W ) W S
Результаты решения представляются в виде аналитической или графической зависимости или в виде таблицы,
которая называется таражной таблицей.
Основным недостатком рассмотренного датчика является низкий коэффициент использования диапазона
линейных деформаций упругих элементов, так как каждый из них рассчитывается из условия максимума
суммарного действия всех шести измеряемых компонент. По этой же причине невозможно создать датчик такого
типа, имеющий различные диапазоны измерения для каждой из компонент вектора сил.
Поэтому используются датчики модульной конструкции, размещаемые в основаниях пальцев манипулятора,
обеспечивающие механическое разделение компонент векторов сил и моментов
Они имеют простую пространственную конструкцию, позволяющую использовать взаимно заменяемые модули,
предназначенные для измерения сил заданной величины.
229. Способ выделения измеряемых сил и моментов связан с выбором общих характеристик датчиков. Наиболее часто используются
Тензорезисторные преобразователи.• Тензодатчик - это тензоизмерительный преобразователь деформации твёрдого тела,
вызываемой механическими напряжениями, в электрический сигнал, предназначенный для
последующей передачи, преобразования и регистрации. Наибольшее распространение получили
тензодатчики сопротивления, действие которых основано на их свойстве изменять под влиянием
деформации (растяжения или сжатия) своё электрическое сопротивление.
Тензорезисторные преобразователи используются, как правило, для измерения упругих
механических деформаций и напряжений, при которых справедливы линейные связи между
исследуемыми величинами, в деталях различных промышленных объектов, а также некоторых
l
других механическихR величин,
связанных с деформацией простыми зависимостями.
s
• По используемым материалам тензодатчики бывают металлическими и
полупроводниковыми..
• Сопротивление проводника, представленного цилиндрическим элементом постоянного
сечения зависит от его физической структуры, определяемой удельным сопротивлением ρ и
геометрическими параметрами: длиной l и площадью поперечного сечения s.
• При деформации проводника изменяются его размеры: длина l и площадь поперечного
сечения s, а также вследствие деформации кристаллической решетки- удельное сопротивление ρ.
• Изменение этих параметров вызывает изменение электрического сопротивления R
проводника, которое связано с этими параметрами соотношением.
230.
• Относительное изменение электрического сопротивления цилиндрического элемента , вызванноеR l s
деформацией:
s
R
R
l
s
.
l
• Если деформирование происходит в области упругих напряжений, то поперечные деформации
(изменение
) связаны с продольными ( l ) линейной зависимостью, в
s
2
r
r
которой коэффициентом пропорциональности является коэффициент Пуассона μ.
• Тогда,
• Следовательно,
• Обозначая
s
r
l
2
2
S
r
l
l l l , получим функцию преобразования:
R
l
(1 2 )
l
R (1 2 ) l
• Если принебречь изменением удельного сопротивления, то чувствительность такого
преобразователя будет:
S / (1 2 )
0
R
l
• В металлических проводниках коэффициент Пуассона изменяется от 0.24 до 0.40, а удельное
сопротивление незначительно изменяется только при деформациях растяжения и сжатия. Поэтому в
первом приближении основная характеристика тензорезисторного преобразователя –
чувствительность – может быть оценена по формуле
S0 R / l (1 2 ) 1.8
231. Тензорезисторные преобразователи.
• Чтобы оценить влияние изменения удельного сопротивления на чувствительность датчикарассмотрим поведение металлического элемента под воздействием механических напряжений и
электрического поля.
• Для простоты обозначений рассмотрим в прямоугольной системе координат кубический
элемент (Рис.24), на котором приведены составляющие напряжений и электрического поля. . В металлах
удельное сопротивление ρ зависит только от напряжений растяжения – сжатия и не зависит от
напряжения сдвига. Оно определяется соотношением
3
σ13
σ31
σ21
σ11
• где σ11, σ22, σ33 - механические напряжения в 3 – х
взаимно перпендикулярных направлениях;
23
σ32
σ12
σ22
I2,E2
1
I1,E1
0 (1 11 11 12 22 13 33 ) 0 [1 11 11 12 ( 22 33 )]
I3, E3
σ33
Рис.24
2
•π11, π22, π33 – тензорезисторные продольные
коэффициенты, π12, π13, π23 - тензорезисторные
поперечные коэффициенты;
Ek , Ik - напряженность поля и плотность тока в
соответствующем направлении (K =1,2,3)
• Для металлических тензоэлементов π11 = π22, = π33 и π12, = π13, = π23. При линейном
напряжении в направлении по оси 1 : σ11=σ = const; σ22= σ33 = σ12 = σ13 = 0.
E l
R [ 11E (1 2 )] l
S0 R l 11E (1 2 ) .
• Очевидно, что в этом случае :
R 11 (1 2 ) l .
• Поскольку для области упругих напряжений
• то чувствительность такого преобразователя
232.
• В частности, для константана, из которого изготавливаются проволочныепреобразователи, у которого π11 =1.5*10 -12 Па -1; E = 166*109 Па, чувствительность S0 =2.
• Основные требования, предъявляемые к металлическим тензометрическим
преобразователям состоят в следующем:
1. Преобразователь должен иметь высокую чувствительность. Это требование возникает
в связи с тем, что входной сигнал, (относительная деформация объекта), поступающий на
преобразователь,, очень мал ( порядка 10 -3 ) и вызванное им относительное изменение
сопротивления для рассмотренных материалов имеет тот же порядок. Получение от
такого датчика электрического сигнала, пригодного для использования в системе
управления, требует усиления и, следовательно, усложнения и удорожания прибора.
2. Преобразователь должен иметь возможно низкий температурный коэффициент
сопротивления. Поскольку измеряемые деформации малы, то высокий температурный
коэффициент сопротивления будет вносить существенный вклад в измеряемую
деформацию и искажать получаемые результаты.
3. Для уменьшения габаритов датчик должен иметь преобразователь с высоким
удельным сопротивлением. Поэтому для изготовления металлических тензометров
используются сплавы: константан, нихром, манганин, никель, хромель, висмут,
титаноалюминиевый сплав и т. д
233.
Полупроводниковые датчики.• Тензорезистивные свойства полупроводникового кремния и германия были обнаружены в 1959
году. В 1960 году началось серийное производство полупроводниковых тензодатчиков.
Основной элемент полупроводникового тензодатчика - сверхтонкая прямоугольная плёнка
монокристалла кремния, прикреплённая для удобства обращения к подложке. Сопротивление
кремния превосходит в 103 раз сопротивления константана, используемого в проволочных и
фольгованных датчиках. Поэтому в полупроводниковых тензодатчиках не применяется
конфигурация решётки.
Применение полупроводниковых тензорезисторов вместо металлических в датчиках
механических величин позволяет на один-два порядка повысить чувствительность и величину
выходного сигнала датчиков. Это дает возможность обходиться без усилительной аппаратуры,
упрощает конструкцию датчиков, расширяет их рабочие диапазоны.
Кремний анизатропный материал и для него при одновременном воздействии электрического
поля и механических напряжений сжатия – растяжения и сдвига каждая из компонент Е1, Е2, Е3
напряженности электрического поля является функцией плотности токов, текущих во всех трех
направлениях, т. е.
E ( I 1 , I 2 , I 3 ).
Для кремния компоненты электрического поля могут быть представлены в виде:
E1 / 0 I 1[1 11 11 12 ( 22 33 ) 44 ( I 2 12 I 3 13 );
0 соответственно
I 2 [1 11 22 продольный,
12 ( 11 33поперечный
) 44 ( I1 и12сдвиговый
I 3 23 ); тензорезисторные
где π11,Eπ212/, π
44
E
/
3
0 I 3 [1 11 33 12 ( 11 22 ) 44 ( I 2 23 I1 13 ),
коэффициенты.
234.
Если тензоэлемент вырезан вдоль одной из кристаллографических осей ( например 1 ) имеханическое напряжение приложено вдоль этой оси, то
E I (1 ).
1
0
1
11
11
Если тензоэлемент вырезан произвольно относительно кристаллографических осей, то для него продольный
тензорезисторный коэффициент
ˆ11 11 2( 44 12 11 )(l 2 m2 l 2 n 2 n 2 m2 ),
где
l , m, n- направляющие косинусы вырезанного элемента
относительно кристаллографических осей.
• Значения тензорезисторных коэффициентов зависят от
концентрации примесей в кремнии и однозначно связаны с
удельным сопротивлением. Наибольшие значения коэффициентов:
3
2
Для p – кремния (ρ =0.02 Ом см): π44 = 94.5*10-11 Па-1;
π11= 4.53*10-11 Па-1;
π12= 0.75*10-11 Па-1.
Для n – кремния (ρ =0.02 Ом см): π44 = -9.5*10-11 Па-1;
π11=- 72.6*10-11 Па-1;
π12= 38*10-11 Па-1 .
1
Рис.26. Тензоэлемент по
направлению [100].
3
• Чувствительность тензоэлементов определяется их
расположением относительно кристаллографических осей при
изготовлении.
• Тензоэлемент из кремния n – типа вырезается в направлении
кристаллографической оси 1 то есть в направлении [100].
Тензоэлементы из кремния p – типа имеют максимальную
чувствительность, если вырезаются в направлении [111]
2
1
Рис.27. Тензоэлемент по
направлению [111].
235.
Конструкции дискретных тензометрических преобразователей.В настоящее время применяются проволочные, фольговые и полупроводниковые датчики.
Проволочные тензометрические преобразователи.
Конструкция простейшего датчика (Рис. 25). На полоску тонкой бумаги
или лаковой пленки 1 приклеивается зигзагом уложенная тонкая проволока
2 диаметром 0.12 – 0.05 мм , изготовленная из металла с высоким
омическим сопротивлением. Для включения преобразователя в
измерительную цепь к ее концам присоединяются (сваркой или пайкой)
медные проводники 4.
Сверху преобразователь покрывается слоем лака или заклеивается
бумагой 3.
Для измерения деформации исследуемого объекта датчик
приклеивается к его поверхности так, чтобы деформации от объекта
полностью передавались преобразователю.
Рис. 25.
Измерительной базой является длина участка детали, на котором
расположен датчик. Применяются базы 5 – 20мм сопротивлением 30 -500 ом.
Такие датчики применяются для регистрации деформации растяжения и определения
напряжений и сил, вызывающих эти деформации, Поэтому они приклеиваются к деталям в
направлении наибольшего напряжения и регистрируют деформации одного направления.
Поперечные участки преобразователя деформируются под действием напряжений,
перпендикулярных измеряемым.Эти деформации порождают погрешность измерения. Однако
при правильном выборе размеров датчика возникающие искажения незначительны. Как
правило, форма датчиков определяется формой объекта и поставленной задачей измерения.
236.
Фольговые тензопреобразователи.Фольговые тензопреобразователи (Рис 26)
изготавливаются из константановой фольги толщиной 4 –
12 мкм, которая наносится на тонкую лаковую пленку.
Если датчики изготавливаются травлением, то можно
получить любой рисунок решетки, с помощью которого
затем регистрировать деформации поверхностей деталей
сложной формы.
Поскольку у таких преобразователей отношение
периметра поперечного сечения к его площади
значительно больше чем у проволочных, то они имеют
большую теплоотдачу и, следовательно, большие
допускаемые токи. Вследствие этого чувствительность
таких датчиков выше чем проволочных.
Один из таких датчиков изображен на Рис 26.
Рис.26. Фольговые тензопреобразователи.
Пленочные датчики.
• Металлические пленочные тензорезисторы изготавливаются вакуумной возгонкой
тензочувствительного материала с последующим осаждением на специальную подложку.
• Форма такого преобразователя задается изготовляемой в соответствии с целями исследований
маской, через которую происходит напыление. Пленочные датчики имеют толщину не более 1 мкм.
Они обладают всеми достоинствами фольговых датчиков
Размеры, конструкция и форма тезодатчиков определяются формой и
характеристиками поверхности объекта , на котором проводятся измерения, Датчики
некоторых часто используемых форм приведены на Рис. 27.
237. Конструкции дискретных тензометрических преобразователей.
Рис. 27. Решетки тензодатчиков: проволочные — петлевая (а),витковая (б) и с перемычками (в);
фольговые — для изменения одной компоненты деформации (г),
трех компонент (д) и кольцевых деформаций (е);
1 — проволока; 2 — выводы решетки; 3 — перемычки; S — база
датчика
Рис. 28. Схема тензорезисторного датчика:
1 — решётки; 2 — упругий элемент;
R1,..., R4 — тензорезисторы; х — измеряемый
параметр.
238. Фольговые тензопреобразователи.
• Для всех металлических датчиков важным параметром решетки является расстояниемежду витками. Оно определяет при заданных габаритах датчика число витков и,
следовательно, величину сопротивления датчика, а также допустимое значение тока,
который ограничивается самонагревом и тем меньше, чем меньше расстояние между
витками.
• При измерении деформации поверхности объекта датчиком на его поперечных участках
изменяется сопротивление. Оно создается механическими напряжениями
перпендикулярными оси чувствительности датчика и складывается с сопротивлением,
вызванным продольной деформацией, искажая результат. Эти искажения пропорциональны
отношению ширины датчика к общей длине продольных участков, умноженным на
коэффициент Пуассона.
• Для работы при температурах объекта от до -300 С до 1800 С используются
преобразователи из медно – никелевых сплавов: константана, эдванса и др.
• Преобразователи из никель - хромовых и никель – хромоалюминиевых сплавов
применяются при температурах до 4000 С.
• Для крепления датчиков к объектам при высоких температурах применяются
неорганические фосфатные цементы и жаропрочные окислы алюминия.
• Тарирование датчиков производится на стержнях, изгибаемых постоянным моментом,
или стержнях аналогичных моделям для проведения разрывных испытаний
239.
Полупроводниковые тензорезисторы.• Полупроводниковые тензорезисторы дискретного типа – это тонкие полоски из кремния p –типа,).
вырезанные в направлении оси [111] или кремния n – типа, вырезанные в направлении оси [100], (и германия p
–типа и n – типа), обладающие тензоэффектом, проявляющимся в том, что при воздействии на них
механических нагрузок изменяется их сопротивление.
• Схема датчика приведена на рис. 28 . На концах полоски расположены контактные площадки, длиной 0.25 -0.60
мм, к которым припаиваются выводы. Размеры изготавливаемых датчиков: длина 2 – 12 мм, ширина 0.15 – 0.50
мм, толщина ≈ 0.02 мм. Начальное сопротивление – (50 – 10000) ом,
коэффициент
тензочувствительности достигает 100.
• Зависимости относительного изменения сопротивления от относительной
деформации элементов из кремния p –типа и n – типа. нелинейны, вследствие
чего рабочий диапазон таких преобразователей ограничен значениями
B
L
Рис. 28
относительной деформации ± 0.1%.
• Применение полупроводниковых тензорезисторов вместо металлических
• позволяет на один-два порядка повысить чувствительность и величину выходного сигнала датчиков.
• Это дает возможность обходиться без усилительной аппаратуры, упрощает конструкцию датчиков,
• расширяет их рабочие диапазоны.
• Наиболее перспективными являются полупроводниковые материалы на основе моносульфида самария SmS.
Их преимущества : высокая чувствительность: коэффициент тензочувствительности от 50 (для
поликристаллических пленок) до 260 (для монокристаллов), коэффициент всестороннего сжатия до 5,8-10-3 МПа-1,
линейность тензохарактеристики; низкий температурный коэффициент сопротивления (ТКС), возможно
достижение нулевого значения ТКС с любой требуемой точностью; высокая радиационная стойкость; стойкость к
внешним воздействиям (предел прочности на сжатие 40кг/мм2, температура плавления ~2200°С).
Наличие у SmS фазового перехода первого рода полупроводник - металл позволяет изменять сопротивление,
тензочувствительность и ТКС готового тензорезистора, что облегчает балансировку мостовой схемы и регулировку
ее параметров при изготовлении датчиков.
240.
Интегральные полупроводниковые тензорезисторы.Датчики такого типа изготавливаются выращиванием тензорезисторов
непосредственно на упругой подложке, выполняемой из кремния или сапфира.
• Подложки, сделанные из этих материалов, обладают почти идеальными
упругими свойствами, т. е. линейной зависимостью деформации от напряжений
и полным отсутствием гистерезиса.
Выращиваемый на подложке тензорезистор «сцепляется » с материалом
упругого элемента за счет внутримолекулярных сил, что исключает
возникновения погрешностей, связанных с приклеиванием.
• Электрический сигнал, получаемый от тензодатчика, формируется на
мостовой схеме, состоящей из четырех сопротивлений, часть из которых
составляют используемые для измерений датчики.
• В связи с этим на подложке выращивается не один тензорезистор, а структура
в виде моста или полумоста сопротивлений, в которых присутствуют
компенсирующие элементы.
241. Полупроводниковые тензорезисторы.
• Как правило, используется схема равновесных мостов, в которой значениясопротивлений моста должны удовлетворять определенным условиям с высокой
точностью.
• Благодаря такой технологии изготовления тензорезисторы, составляющие полумост
(или мост) более идентичны, чем дискретные резисторы, и , кроме того, за счет их малых
габаритов обеспечивается идентификация внешних условий и исчезает погрешность,
связанная с установкой нуля.
R1
R2
R3
R4 (а)
R1
R2
Рис. 29. Мостовые (а) и
полумостовые (б) структуры
тензометрических датчиков.
• Наличие положительных характеристик у
«выращиваемых» тензорезистров, привело к
созданию датчиков с так называемыми
интегральными тензорезисторами,
выполняемыми в виде КНК – структур
(кремний на кремнии) и КНС – структур
(кремний на сапфире).
• В КНК – структурах электрическая изоляция
осуществляется за счет p - n перехода, в КНС –
структурах за счет сапфира. Надежность
последних выше, чем у первых
242.
Погрешности приборов с тензометрическими преобразователями.• Одна из значимых погрешностей тензометров связана с их градуировкой. Как правило, при
измерениях преобразователь является элементом определенной электрической цепи. Чаще всего
это мостовая схема, состоящая из 4-х сопротивлений, часть которых является преобразователями.
• Если невозможно градуировать непосредственно рабочий преобразователь, то погрешность,
обусловленная не идентичностью сопротивлений) и качеством наклейки рабочих и градуируемых
тензорезисторов, может достигать 5%, а общая погрешность всего прибора, вместе с
погрешностями указателя, усилителя и других элементов, достигает 10%.
Если имеется возможность градуировать (тарировать) рабочий тензометр и контролировать
чувствительность усилителя, то погрешность прибора может быть снижена до 0,5%.
• Самой существенной погрешностью тензорезисторов является так называемая температурная
погрешность, возникающая за счет внешних условий и характера эксплуатации прибора.
При изменении температуры материала преобразователя изменяется его начальное
сопротивление R0 и коэффициент тензочувствительности S0, т.е. появляется погрешность нуля
(аддитивная) и чувствительности (мультипликативная).
Изменение величины R0 преобразователя, наклеенного на объект, под действием температуры
определяется:
1. Изменением удельного сопротивления ρ, определяемого температурным коэффициентом
сопротивления вследствие его нагрева от тока и окружающей среды;
2. Изменением длины датчика под действием механического напряжения, появляющегося в том
случае, если коэффициенты линейного расширения объекта и преобразователя различны.
243.
• Если обозначить температурный коэффициент сопротивления преобразователя α и учесть, что0 (1 T )
• где
T , то.
0
и
( l ) ( T ) / L
• Как известно, линейное расширение металлов при изменении температуры определяется формулой
l 1 T
• Если обозначить коэффициент линейного расширения исследуемого объекта βд, а преобразователя βТ, то
относительное удлинение преобразователя за счет разности удлинений объекта и преобразователя будет
.
( ) ( ) T
l
• Общая длина «температурной деформации» будет:
д
T
( l ) T / L ( д T T
• где T- изменение температуры.
• У некоторых материалов (сплавов), из которых изготовляются тензопреобразователи температурные
коэффициенты сопротивления зависит от соотношения компонент. В этом случае можно применять датчики, у
которых коэффициенты линейного расширения одинаковы с этим параметром объекта. При этом может быть
значительно уменьшена температурная погрешность.
• Основным приемом, применяемым для уменьшения температурной погрешности является метод компенсации,
состоящий в следующем.
• Для регистрации выходных сигналов преобразователя используются равновесные мосты сопротивлений,
состоящие из четырех сопротивлений, попарно одинаковых. Если сопротивления соответствующих плеч моста
поставить в одинаковые температурные условия, то температурная погрешность компенсируется.
• Температурная погрешность сильно проявляется у полупроводниковых датчиков. Коэффициент линейного
расширения таких преобразователей мал (у кремния 2.5 * 10-6 K-1) и, кроме того , параметры полупроводников
сильно зависят от температуры.
244.
Измерительные цепи тензодатчиков.
• Выбор измерительных цепей тензометрических датчиков связан с необходимостью измерения
относительно малых изменений сопротивления и коррекции температурных погрешностей нуля и
чувствительности.
• Для решения этой задачи чаще всего применяется схема измерительной электрической цепи в
виде моста Уитстона.
• При дифференциальном включении тензорезисторов в два соседние плеча удается значительно
снизить температурную погрешность нуля. В некоторых случаях также существует возможность
уменьшения и погрешности чувствительности.
• Применение мостовой схемы связано с нарушением линейной зависимости выходного сигнала от
входного. Однако для проволочных и фольговых датчиков, у которых εR не превышает 2% эта
нелинейность мала.
• Для полупроводниковых преобразователей, у которых εR достигает 10% необходимо учитывать
нелинейность коэффициента чувствительности и мостовой схемы.
• Так как в процессе измерений сопротивление рабочих плеч моста изменяется незначительно, то
очень важно уравновешивание моста в начальном положении.
• Для уравновешивания его до значения начального состояния, соответствующего «кажущейся
деформации» εl = 10-5 нужно изменять сопротивление нерабочего плеча с порогом 4*10-6 его полного
сопротивления.
• Стабильность сопротивления нерабочих плеч моста должна быть ±10-6.
245.
Неравновесные мосты.UВЫХ
• Для коррекции температурных погрешностей нуля и
чувствительности тензорезисторов наиболее эффективны мостовые
RI
схемы, выполненные в виде неравновесных мостов Рис. 29.
R1
RН
R3
• Основная идея неравновесных мостов состоит в том, что в исходном U0
( начальном) состоянии выходной сигнал с мостовой схемы равен
нулю.
UН
R2
• Для обеспечения этого к делителю, выполненному на
R4
сопротивлениях R1 и R2, в котором R1 является тензопреобразователем,
параллельно подсоединяется аналогичный делитель из сопротивлений
R3 и R4 , подобранных так, чтобы при отсутствии изменения
сопротивления R1 напряжение UН на нагрузке RН и ток IН через нее были Рис. 29.Схема неравновесного моста
равны нулю.
Это выполняется если для сопротивлений справедливо
R1R4 R2 R3 .
При действии нагрузки на объект сопротивление преобразователя R1 = R01, скрепленного с
объектом, изменится и станет равным R1 = R01 + ΔR.
В связи с этим нарушится равновесие моста и через сопротивление Rн потечет ток Iн = f1 (ΔR) ,
создавая на нем падение напряжения Uн = f2 (ΔR)
Мостовая схема позволяет осуществлять температурную компенсацию, например, используя в
качестве компенсационных датчиков R2 (или R3).При этом они приклеиваются на исследуемую
деталь там , где эта деталь не деформируется , но нагревается так же как R1.
246.
Кроме этого, можно увеличить электрический сигнал на выходе UН, располагая R4 аналогично R1.
В общем случае, ток, протекающий через сопротивление нагрузки RН мостовой схемы, изображенной на Рис. 30,
при условии, что сопротивление источника тока RI пренебрежимо мало, определяется соотношением:
IН U0
( R1 R4 R2 R3 )
RН ( R1 R3 )( R2 R4 ) R1 R3 ( R2 R4 ) R2 R4 ( R1 R3 )
Тогда выходное напряжение
U Н I Н RН .
(1)
(2)
Как правило, измерения производятся нулевым методом,
R1
то есть методом, при котором отсчет производится от условий,
при которых мост уравновешен и ток IН = 0. Для этого
необходимо, чтобы выполнялось условие:
R1R4 R2 R3 .
R3
Ri
RН
(3)
Далее рассматриваются мостовые схемы с источником
питания постоянного тока и, поскольку это часто используется
U0
R2
UН
R4
в практике, с одинаковыми сопротивлениями во всех плечах
моста. (RI = R) (i=1,2,3,4).
Если мост содержит датчик, состоящий их двух
преобразователей, включенных в плечи R1 и R2 (Рис. 30)
так, что при измерениях их сопротивления изменяются
R1 = R01+ ΔR и R2 = R02 - ΔR, то в этом случае сигнал на
выходе увеличивается.
Рис.30.Мостовая схема с
дифференциальным преобразованием.
247. Неравновесные мосты.
Если в мостовую схему включен только один преобразователь -,R1,то при изменении его сопротивления на
ΔR за счет механической деформации падение напряжения на нагрузочном сопротивлении будет:
U Н U 0 [ 4(1
R
R 1
) R (2 3
] R.
RН
RН
Видно, что выходной электрический сигнал является нелинейной функцией εR. Однако, как легко проверить
, эта нелинейность очень мала. Значительно важнее влияние величины выходного сопротивления. Если при
RН →∞ , то выходной электрический сигнал равен:
1
U Н U 0 R (4 2 R ) 1 U 0 R
4
1
1
U Н U 0 R (4 * 2 5 R ) U 0 R .
8
а при RН = R
Если в мостовой схеме используется дифференциальное преобразование (Рис. 30), при котором две
одинаковые половины датчика включаются в плечи R1 и R2, причем при нагрузке R1 = R + ΔR ,а R2 = R – ΔR,
то в этом случае
U
R
2
1
UН
0
2
R [1
RН
(1
R
2
)] 1
2
U 0 R
Поскольку для проволочных и фольговых датчиков величина εR ≤ 4 %, то для получения достаточно точных
данных необходимо использовать тарирование.
Следует заметить, что рассмотренные мостовые схемы в исходном состоянии не обеспечивают условия
равновесия вследствие технологического разброса значений сопротивлений в плечах моста.
Чтобы осуществить регулировку установки нуля моста используются схемы вида, изображенного на рисунке
31.
UН IН 0
248.
В ней введен резистор R0. При верхнем
положении движка Rd сопротивление R0
подключается параллельно R2,, а в нижнем –
R1. Установкой движка в соответствующем
положении всегда можно обеспечить
равновесие плеч моста..
• У полупроводниковых датчиков
чувствительность εR/εl = 100. Поэтому при
предельных упругих напряжениях, когда εl =
0.001 величина εR = 0.1.
• В этом случае влияние нелинейных
слагаемых в выражении для выходного
сигнала достаточно велико и должно
учитываться.
• Как правило, для уменьшения влияния
нелинейности применяется тарирование
датчиков
R1
RI
R3
RН
Rd
R0
R2
UН
R4
Рис. 31. Компенсационная схема моста.
249.
Пьезоэлектрические преобразователи.• Пьезоэлектрические преобразователи — это устройства, использующие пьезоэлектрический
эффект, присутствующий в кристаллах, керамике или плёнках, для преобразования механической
энергии в электрическую и наоборот.
• Пьезоэффект (пьезоэлектричество) – это обратимая электромеханическая связь электрической
поляризации (индукции) и механических деформаций (напряжений), существующая в анизатропных
диэлектрических веществах, обладающих определенной кристаллической структурой и симметрией.
• Чувствительные элементы преобразователей изготавливаются из кристаллических природных
материалов, искусственно спекаемых образцов , а также пленок, обладающих пьезоэффектом.
Пьезоэффект проявляется следующим образом.
1. Плоская прямоугольная пластина с плоско – параллельными гранями, вырезанная из кристалла ,
обладающего пьезоэффектом, помещенная в электрическое поле, деформируется.
2. При деформации такой пластины от механических напряжений, вызываемых действующими на
пластину силами, на соответствующих гранях пластины появляются электрические заряды.
Эти явления называются соответственно обратным и прямым пьезоэффектом
По принципу действия пьезоэлектрические преобразователи делятся на три группы:
• 1) Преобразователи, использующие прямой пьезоэффект, применяемые для измерения параметров
механических процессов, в том числе: силы, давления, линейных и угловых ускорений, а также
вибрации, ударов. Ими непосредственного измеряются упругие деформации. Выходным сигналом у
них являются электрические заряды, пропорциональные механическим напряжениям, создаваемым
действующими на преобразователь силами.
• 2) Преобразователи, использующие обратный пьезоэффект и применяемые в качестве излучателей
ультразвука в гидроакустике и дефектоскопии, а также преобразователи, превращающие энергию
электрического заряда в перемещение объектов (пьезодвигатели и пьезореле) для юстировки зеркал
оптических приборов и исполнительных элементов систем автоматики.
• 3) Преобразователи параметрического типа, использующие одновременно прямой и обратный
пьезоэффекты - пьезоэлектрические резонаторы, наиболее эффективно излучающие и принимающие
энергию на фиксированной резонансной частоте.
250.
• Причиной проявления пьезоэффекта является смещениесостояния электрического и механического равновесия
кристалла под влиянием внешних воздействий.
Деформация электронных оболочек и относительные
В отсутствие внешних электрических полей и
механических сил кристаллическая структура кристалла не
деформирована и электрически нейтральна (в
макроскопическом смысле).
• Деформация электронных оболочек и относительные
смещения атомов и ионов в структуре кристалла под
действием внешнего электрического поля приводят к
макроскопической деформации кристалла и всего исследуемого
объекта.
• Аналогично макроскопическая деформация кристалла
вызывает появление электрических зарядов на поверхности
объекта.
• Проявление описанного явления пьезоэффекта можно
пояснить на структуре кристалла кварца.
• Кристалл кварца (рис. 32) представляет шестигранную
призму с неравными гранями.
• Он имеет три полярные оси Xi (i = 1,2,3), соединяющие
противоположные, неравнозначные ребра.
• Четвертая ось Z не является полярной, поскольку при
повороте на 1800 вокруг любой из полярных осей,
перпендикулярных к Z, кристалл совмещается со своим
первоначальным положением.
• Так как в оптическом смысле эта ось Z является осью
симметрии, то ее называют оптической осью.
Рис.32. Кристалл кварца
251. Пьезоэлектрические преобразователи.
• Полярные оси X являются (и называются) электрическимиосями, поскольку по ним направлены векторы поляризации
кристалла.
• Три оси Yi (i = 1,2,3), перпендикулярные электрическим
осям и оптической оси, называются механическими осями.
Направление осей в кристалле кварца изображено на
рисунках 33 и 34.
• Пластинки и диски, используемые в качестве
преобразователей, вырезаются так как показано на этом
рисунке.
• Ребро a пластинки параллельно полярной оси X , ребро b –
механической оси Y и ребро с – оптической оси Z.
Рис. 33
• Изготовленная таким образом пластина работает
следующим образом:
1. При ее сжатии в направлении электрической оси X на
гранях, перпендикулярных этой оси, возникают
положительный и отрицательный заряды. Такое явление
принято называть прямым продольным пьезоэффектом.
2. При растяжении пластины в направлении оси Y, т.е.
параллельно ребру b на тех же гранях возникают заряды тех
же знаков. Это явление называется прямым поперечным
пьезоэффектом.
Рис. 34
252.
Химическая формула кварца SiO2. В первом приближении можно представить атомы кремния и кислорода
расположенными в шестигранных ячейках, как это показано на рис. 35. (Вид по направлению оптической оси).
Предполагается, что атомы кремния расположены по спирали, которая может быть левой или правой. (На рис 35 –
левая спираль).
Каждый атом кремния имеет 4 единичных положительных заряда, атом кислорода – 2 отрицательных.
Структура ячейки такова, что заряды атомов взаимно уравновешиваются, так что ячейка - электрически
нейтральна.
Если каждую пару атомов кислорода, расположенную над или под атомами кремния, рассматривать как один
атом кислорода с 4 – мя зарядами, то ячейка примет вид представленный рис 36(а). По полярным осям
направлены векторы поляризации. Сумма их проекций на любое направление равна нулю. Поэтому ячейка электрически нейтральна.
1. Если такую ячейку сжать по направлению полярной оси X1, то атом кремния 1 вклинится между атомами
кислорода 2 и 6, а атом кислорода 4 – между атомами кремния 3 и 5. (Рис. 36(б)) При этом на плоскости А появится
отрицательный, а на плоскости B положительный заряды. Это явление называется продольным
пьезоэлектрическим эффектом.
2. Если ячейку сжать по направлению перпендикулярному оси X1, то атомы кремния 3 и 5, а также атомы
кислорода 2 и 6 сместятся внутрь на одинаковую величину (как показано на рис. 36(в))., Поэтому на плоскости А
появится положительный, а на плоскости B отрицательный заряды. Это явление называется поперечным
пьезоэлектрическим эффектом.
3. При растяжении ячейки в направлении электрической оси и сжатии в направлении механической оси на
тех же, что и ранее гранях возникают заряды противоположных знаков. Очевидно, что при замене сжатия
растяжением знаки изменятся на обратные.
4. При нагружении ячейки по направлению оптической оси, она также остается электрически нейтральной
При всестороннем равномерном нагружении ячейки, она остается электрически нейтральной.
253.
Рис. 35. Структура кристалла кварца в направленииоптической оси.
Рис. 34. Кристалл кварца.
Fx
P1
p3
Fy
p2
Fx
Рис. 36. К теории модели пьезоэффекта в кварце.
Fy
254.
• Из физической природы пьезоэффекта следует, что присиловом воздействии на кристалл кварца, т. е. при
создании в нем механических напряжений, электрические
заряды могут возникать на трех парах его граней,
перпендикулярных электрическим осям (Рис.37).
• Следовательно, поляризационный заряд является
вектором с тремя составляющими.
• Механическое напряженное состояние элемента любого
твердого тела, как было показано ранее, определяется
тензором 2 – го ранга с девятью компонентами:
1.
σ 11 , σ 22 , σ 33 – компоненты растяжения - сжатия;
2.
σ ik ( I,k = 1,2,3, I ≠ k) – компоненты сдвига.
• Тензор имеет вид:
11
21
31
12
22
32
Z
c
Y
b
d
13
23
33
• В силу того что σ ik = σ ki этот тензор содержит только
6 независимых компонент, которые далее обозначаются
σ1 = σ11 ;
σ2 = σ22 ;
σ3 = σ33;
σ4 = σ23;
σ5 = σ13;
σ6 = σ12;
тензор пьезоэлекрических модулей будет неполным.
X
X
c
b
d
Y
Z
X
Рис.37. Модель кристалла кварца.
255.
• Пьезоэлекрический модуль, определяющий зависимость электрического заряда от механическихнапряжений является тензором 3 – го ранга с 27 – ю компонентами. Но в силу того, что тензор
напряжений содержит только 6 независимых компонент, пьезоэлекрический модуль представляется в
виде таблицы, содержащей 18 компонент.
d
d
d
d
d
d
11
12
13
14
15
16
d ij d 21 d 22 d 23 d 24 d 25 d 26
d 31 d 23 d 33 d 34 d 35 d 36
• Для определения величины и места образования зарядов удобно пользоваться
усовершенствованной таблицей, представленной ниже
σ1
σ2
σ3
σ4
σ5
σ6
1 d11 d12 d13 d14 d15 d16
2 d 21 d 22 d 23 d 24 d 25 d 26
3 d 31 d 23 d 33 d 34 d 35 d 36
С ее помощью при известном механическом напряжении сразу определяются плотности зарядов
δi (i=1,2,3) на всех трех парах граней. Например, при напряжении σ1 плотность заряда на гранях
перпендикулярных оси X1 , будет
d ;
на гранях перпендикулярных оси X2:
на гранях перпендикулярных оси X3;
1 1 11
2 1d21;
3 1d 31.
256.
При сжатии элемента по оси Y (напряжение σ2) на этой же грани образуется зарядПри всестороннем сжатии заряд равен
1 d12 2
1 d11 1 d12 2 d13 3 .
Схема образования зарядов представлена на рисунке 38, соответственно a), b), c).
z
z
z
y
x
F1
(а)
P
y
y
F2
x
(b)
P
x
P
(c)
Рис. 38. Схема образования зарядов.
• При продольном пьезоэффекте, возникающий от механических напряжений заряд не зависит от
геометрических размеров элемента (преобразователя).
Действительно, при сжатии пластинки силой F1, направленной по оси X , заряд на соответствующей грани,
перпендикулярной оси X , будет
q1 1S1 S1d11 1 S1d11F1 / S1 d11F1
Видно, что величина образовавшегося заряда зависит только от силы F1.
При поперечном нагружении, когда сила F2 направлена вдоль оси Y – величина образующегося на плоскости
S! заряда зависит от геометрических размеров преобразователя.
Ее значение определяется отношением соответствующих площадей граней пластинки
q1 2 S1 S1d12 2 S1d12 ( F2 / S2 ) d12 F2 (S1 S2 )
где S1 – площадь грани перпендикулярной оси X; S2 – площадь грани, перпендикулярной оси Y.
В общем случае, плотность заряда δ на грани, где он образуется, равная его величине q, отнесенной к
площади этой грани, определяется формулой
i d ij j ;...(i 1,2.3;... j 1,...,6),
где индекс у пьезомодуля означает, что рассматривается заряд на грани I при действии механического
напряжения вдоль оси j.
257.
Обратный пьезоэлектрический эффект также определяется по матрице пьезомодулей.
В общем случае деформация кристаллов описывается тензором 4 – го порядка, содержащим 81
компоненту. Для пластинки, имеющей форму параллелепипеда, ребра которого параллельны осям X,
Y, Z, где X – полярная, Y – механическая, Z - оптическая оси этот тензор можно упростить.
Если обозначить E1, E2, E3 составляющие электрического поля, приложенного к преобразователю
соответственно по осям X, Y, Z, а ε1, ε2, ε3, ε4, ε5, ε6 - деформации, индексы которых по направлению
совпадают с индексами механических напряжений, то используя тензорные равенства:
1. тензор деформации равен произведению тензора пьезомодулей на вектор напряженности
электрического поля;
2. вектор поляризации равен произведению тензора пьезомодулей на тензор механических
напряжений;
Можно построить таблицу, с помощью которой определяются деформации преобразователя при
воздействии на него электрического поля. Ниже приведена такая таблица.
1 2 3 4 5 6
1 2 3 4 5 6
E1 1 d11 d12 d13 d14 d15 d16
E2 2 d 21 d 22 d 23 d 24 d 25 d 26
E3 3 d31 d 23 d33 d34 d 35 d36
• Используя эту таблицу легко определять деформации преобразователя, возникающие под действием
электрического поля. Например, если к преобразователю приложено электрическое поле
напряженности E1, направленное вдоль оси X , то деформация в этом направлении будет
1 d11E1.
258.
• Симметрия структуры вещества, из которого изготовлен преобразователь приводит ксокращению числа независимых компонент в матрицах пьезоэлектрических модулей.
Это хорошо видно в таблице где приведены данные для кварца и титаната бария
Материал
• Кварц
.
Титанат
бария.
Значения dij 10-12 Kл/Н
-2.31
+2.31
0
-0.67
0
0
0
0
0
0
+0.67
4.62
0
0
0
0
0
0
0
0
0
0
250
0
0
0
0
250
0
0
-78
-78
190
0
0
0
• Наличие полярных направлений в кристаллах материала, из которого
изготавливается преобразователь, определяет практическую важность ориентации его
граней относительно кристаллографических осей. В приведенной таблице значения
пьезомодулей записаны в системе координат, совпадающей с кристаллографическими
осями. В этом случае легко определяется направление, обеспечивающее максимальный
выходной электрический сигнал.
259.
Формы пьезоэлектрических преобразователей.1
1
11
(б)
(а)
(в)
(г)
1
Рис 40. Формы преобразователей: а) – прямоугольная пластинка; б) – круглая пластинка;
в) – цилиндр; г) – сфера. 1 – электроды.
• Геометрические характеристики пьезоэлектрических преобразователей определяются
условиями их работы. Электроды на них делаются методом напыления, что исключает
проблемы с постоянным сопротивлением контакта. Очень важным является наличие
высокого сопротивления между контактами (порядка 1012 ом.)
• Если датчики формируются из нескольких преобразователей, то при параллельном
соединении общий + соединяется с корпусом датчика.
• Простой пьезоэлектрический датчик представляет собой совокупность кварцевых или
керамических пластин или колец, установленных соосно. Каждое кольцо такого датчика
- это пьезоэлемент с продольным пьезоэффектом, вырезанный так, что его торцы
перпендикулярны электрической оси. В этом случае, как определялось ранее плотность
заряда не зависит от геометрических размеров кольца.
• В настоящее время выпускают различные пьезокерамические материалы,
позволяющие конструировать высокочувствительные датчики. Так, для дисков из
пьезокерамики ЦТС-19 коэффициент преобразования KП достигает (1 ... 5) В/Н.
260.
• Каждый пьезоэлемент выполняется в виде кварцевой иликерамической пластинки и является совмещенным преобразователем
генераторного типа, способным накапливать электрическую энергию.
• Пьезоэлектрические датчики, предназначенные для измерения сил и
давлений изготавливаются из наборов преобразователей
соответствующей формы. При их построении широко применяются
схемы последовательного и параллельного соединения пьезоэлементов.
• При последовательном соединении пьезоэлементов (рис. 39 а)
увеличивается электрическое напряжение на выходе датчика, а его
суммарная емкость уменьшается пропорционально их числу.
• При параллельном соединении пьезоэлементов (рис. 39 б)
увеличиваются и накопленный заряд и емкость датчика. Такая схема
подобна батарее кондесаторов.
• Используемые в практической деятельности датчики измеряют силы
от 2-х Н до 200 кН. Чувствительность таких датчиков определяется
значениями соответствующих пьезоэлектрических коэффициентов dij .
а)
б)
+
__ +-
+
+
+
+
-
Uвых
в)
Uвых
г)
Uвых
Uип
Uвых
Рис.39. Пьезоэлектрические датчики.
Схемы: а) -последовательного;
б) параллельного соединения элементов;
в) –простой датчик;
г) – пьезоэлектрический трансформатор.
Пьезопреобразователи, вследствие эффекта стекания заряда, используются для измерения изменяющихся во
времени сил. Поэтому функция преобразования пьезоэлектрического датчика, в общем случае, представляется
следующим образом.
Под воздействием действующей на датчик силы F(t) на соответствующих гранях создается заряд Q(t), который
порождает в электрической цепи датчика ток
dQ
dF
I
Этот ток на выходной нагрузке создает падение напряжения,
dt
k
dt
U в ых K n
dF (t )
dt
• (где Kn - коэффициент преобразования), которое является выходным электрическим сигналом.
261. Формы пьезоэлектрических преобразователей.
• Существенный недостаток простых датчиков, используемых для измерения сил связан с эффектом стеканиязаряда. Разноименные заряды, возникающие на гранях преобразователя при действии на него силы F(t), могут
сохраниться только при условии, что электрическое сопротивление между гранями бесконечно. Конечное
значение сопротивления материала преобразователя и, главное, наличие нагрузочного сопротивления в его цепи
создают условия для нейтрализации зарядов.
(1)
(2)
a)
б)
в)
q
R0
C0
CK RK
RB
CB
q
R
C
U.ВХ
Рис 41. Эквивалентные схемы пьезоэлектрического измерителя.
• Эквивалентная электрическая схема пьезоэлектрического измерителя сил представлена на рисунке 41.
• (1) – схема, включающая основные части измерителя: a) – преобразователь; б) - соединительный кабель; в) вход регистрирующего устройства. На ней C0 , R0 – емкость и сопротивление преобразователя; ; Ck , Rk – кабеля;
Cbв Rb – измерителя
2) – упрощенная схема, используемая для оценки параметров.
• Образующиеся под действием силы на C0 заряды мгновенно передаются на емкости CК и CВ. Эквивалентная
электрическая цепь, представленна на рис 41 (2), состоит
• из емкости C = C0,+ CК,+ CВ и сопротивления R = R0RКRВ/(R0RК+R0RВ+RКRВ).
• Емкость C , несущая заряд q, окажется под напряжением U0 = q/C и будет разряжаться через сопротивление R
по закону
где
t /
U
(
t
)
U
0
- постоянная времени цепи, равная времени , за которое напряжение на емкости уменьшается в
RС
е-1 ≈ 2.78 раз.
262.
• Пьезоэлектрический преобразователь в виде пластинки по сути является конденсатором, Еслиэто круглая пластинка, то ее емкость:
C = εS/d
где ε, S,d - соответственно диэлектрическая проницаемость, площадь пластинки, ее толщина.
• Емкость кварцевой пластинки с S=1см2 и d=1мм около 10 pf и если общее сопротивление в
цепи датчика 108 ом , то τ = 10-3 с. и стекание заряда влияет на точность измерения, а измерение
статических сил практически невозможно.
• Увеличение емкости датчика для изменения τ ведет к уменьшению выходного сигнала и
габаритов датчика, что практически нецелесообразно.
• Поэтому входное сопротивление усилителя, если сигнал преобразователя усиливается, или
регистрирующей системы, если усилителя нет, должно быть велико.
• Для повышения чувствительности пьезоэлектрических преобразователей эффективны
следующие меры:
1.
использование материалов с высоким пьезоэлектрическим модулем;
2. использование поперечного пьезоэлектрического эффекта при соответствующем выборе
площадей преобразователя;
3. использование для изготовления преобразователей фольгированной пьезоэлектрической
пленки;
4.
выполнение датчика в виде набора параллельно соединенных преобразователей;
5.
применение в качестве датчиков пьезоэлектрических трансформаторов.
263.
• Пьезоэлектрические трансформаторы (ПЭТ).• Пьезоэлектрические трансформаторы –это датчики, создаваемые по схеме трансформатора
переменного тока, работающего на резонансных частотах в диапазоне 0.02 - 200 кГц.
• Схематически устройство пьезотрансформатора изображено на рисунке, где он представлен в
виде четырехполюсника, имеющего только электрические вход и выход.
Вход
Выход
Пьезоэлектрический трансформатор
• Функционирование пьезотрансформатора основано на использовании прямого и обратного
пьезоэффектов. Электрическое напряжение, приложенное к входным электродам
пьезотрансформатора, в результате обратного пьезоэффекта вызывает деформацию всего объёма
пьезоэлектрика и на выходных электродах возникает электрическое (вторичное) напряжение, как
следствие прямого пьезоэффекта. Происходит как бы двойное преобразование энергии электрической в механическую, а затем механической в электрическую.. Пьезотрансформаторы
работающие в резонансном режиме пзволяют получать большие значения коэффициента
трансформации ( более 1000).
• Пьезоэлектрический трансформатор обладает высокой точностью, низкой чувствительностью
к изменению температуры, высокой жесткостью. Он усиливает сигнал по напряжению или току,
осуществляет фазовый сдвиг на 1800, преобразует нагрузочное сопротивление.
• Практически ПЭТ представляет собой Т-образный четырехполюсник и содержит три
обкладки: одну общую для входной и выходной цепи и две изолированные. Различают
продольную, поперечную, а также поперечно - продольную схемы.
264.
• Та часть ПЭТ, которая подключается к источнику переменного напряжения называется возбудителем, аподключаемая к нагрузке– генератором. В возбудителе за счет обратного пьезоэффекта энергия электрических
колебаний, которые подаются на пластины возбудителя, превращается в энергию акустических колебаний,
которые возбуждают механические и, следовательно, электрические колебания в «генераторе».
• Для повышения чувствительности ПЭТ объединяют в составные устройства, в которых несколько
пьезоэлектрических дисков располагаются соосно. Между ПЭТ – ми помещаются демпфирующие прокладки,
изолирующие их друг от друга электрически и акустически. При работе выходной сигнал первого ПЭТ подаются
на усилитель, где усиливаются , и в виде напряжения возбуждения поступают на второй ПЭТ. Далее процесс
повторяется
• Одна из конструкций составног ПЭТ датчика представлена
на рис. 42.
• Это два соосных кварцевых трансформатора с продольным
пьезоэффектом, объединенных последовательно в
измерительную схему. Питание первого (рис.42 а)
трансформатора осуществляется переменным напряжением
UИП; его выходное напряжение является напряжением питания
второго трансформатора.
• Выходное напряжение UВЫХ датчика пропорционально
коэффициенту трансформации каждого диска и измеряемой
силе (рис.42, б).
• Пьезоэлемент, помешенный между обкладками
деформируется силой F(t), которая создает сигнал ,
моделирующий входное напряжение.
• Этот сигнал трансформируется, усиливаясь при этом, и на
выходе датчика регистрируется сигнал пропорциональный
приложенной силе.
• Рассмотренный ПЭТ датчик измеряет статические и
динамические силы в пределах до 1000 Н.
а)
Входная обкладка
3
4 обкладка
Выходная
Изолирующая
прокладка
Uвых 5
Uип
Общая
обкладка
1
Фольга
2
б)
Uип
Uвых
Рис.38 Трансформаторный пьезодатчик
Hewlett Packard: а - схема, б – включение в
измерительную цепь: 1 - диск из пьезоматериала, 2 - общая обкладка, 3, 4 входная и выходная обкладки, 5 – изолирующая прокладка
265.
Магнитоупругие преобразователи.Магнитоупругие датчики, предназначены для измерения механических деформаций, напряжений
и сил в ферромагнетиках. Для функционального преобразования изменения этих механических
величин в изменение электрических величин, удобных для регистрации используется
магнитоупругий эффект.
• Ферромагнитные объкты имеют области самопроизвольного намагничивания, называемые
доменами. Если объект не намагничен, то домены в нем ориентированы хаотично и магнитные
моменты отдельных доменов компенсируют друг друга. При помещении ферромагнитного тела в
магнитное поле домены ориентируются в его направления. В слабом поле ориентация частичная; в
сильном поле при магнитном насыщении материала ориентируются все домены. Ориентация
доменов вызывает увеличение магнитной индукции..
• Если на намагниченный объект воздействовать внешней механической силой, вызывающей
упругие деформации, то, домены изменяют свою ориентацию и индукция в объекте изменяется. Если
силу снять, то индукция примет прежнее значение.
Поскольку абсолютная магнитная проницаемость вещества
μα= μr μ0=B/H
то при заданной напряженности поля H изменение индукции В эквивалентно изменению магнитной
проницаемости. (μ0-магнитная постоянная=1.257*10-8В.с./А.м.; μr- относительная магнитная
проницаемость)
• Изменение индукции или магнитной проницаемости в ферромагнитных телах при действии на
них силы называется магнитоупругим эффектом.
• Он описывается зависимостью магнитной проницаемости μ ферромагнетика от возникающих в
нем механических напряжений σ, обусловленных действием механических сил F.
• Обратный эффект – магнитострикция – это изменение формы и размеров объекта при его
намагничивании.
266.
Типы магнитоупругих преобразователей.Относительное изменение магнитной проницаемости Δμ/μ различных ферромагнетиков
составляет (0.5 – 3)% при изменении σ на 1 МПа.
Магнитоупругий преобразователь - это элемент, состоящий из катушки провода с сердечником из
материала, обладающего магнитостирикционным эффектом. В качестве материала для сердечника
преобразователя часто используются трансформаторные стали (железо-кремниевые сплавы),
пермаллои (термообработанные железо-никелевые сплавы, содержащие от 35 до 80% никеля,
остальное – железо и легирующие добавки: Мо, Сr, Cu и др.), обладающие высокой
чувствительностью,
На рисунке представлены два типа магнитоупругих преобразователей.
Магнитоупругие преобразователи индуктивного типа используются как
переменные индуктивные сопротивления , индуктивность которых
определяется силой F, действующей на сердечник, или как
трансформаторные преобразователи с переменной взаимной
индуктивностью между обмотками.
Зависимость μr =μr (σ) в ферромагнитных веществах в общем случае
нелинейна. Однако при небольших механических напряжениях можно
считать, что относительное изменение магнитной проницаемости
пропорционально σ:
η=Δμ/μrnom =Sμ σ,
где Δμ = μr — μrnom ;
μr - значение магнитной проницаемости при наличии σ;
μrnom - номинальная магнитная проницаемость при σ = 0;
Sμ - чувствительность материала.
267.
Магнитоупругие датчики бывают индуктивными (рис 37. а)) и трансформаторными (рис 37. б)).а)
F
F
б)
Uв
U вы х
U вых
Рис. 37.
Схема параметрических магнитоупругих датчиков:
а - индуктивного, б - трансформаторного.
Магнитоупругие преобразователи индуктивного типа используются как переменные
индуктивные сопротивления , индуктивность которых определяется силой F(t), действующей на
сердечник.
В параметрических индуктивных датчиках действие механической нагрузки на сердечник
преобразуется в изменение электрического параметра преобразователя – импеданса Z следующим
образом
F → σ → μ →RМ → L → Z.
Под действием внешней силы F возникают механические напряжения σ и изменяется
магнитная проницаемость μ сердечника. Изменение магнитной проницаемости ферромагнитного
сердечника вызывает изменение его магнитного сопротивления RМ, которое на однородном участке
магнитной цепи равно
RМ=λ/(μS),
где λ - длина, S - поперечное сечение участка магнитной цепи.
268.
Если магнитная цепь состоит из n участков с различными значениями магнитнойпроницаемости μi и воздушных промежутков, то общее сопротивление магнитной цепи
n
определяется как сумма сопротивлений участков
RM 0 i i S i .
i 1
Эта формула является приближенной, поскольку ею не учитываются: рассеивание поля, его
неоднородность и нелинейность.
В замкнутой магнитной цепи изменение магнитного потока Ф определяется соотношением ,
аналогичным закону Ома
Ф = P/RМ,
в котором магнитный поток Ф – это поток вектора напряженности магнитного поля Н или
магнитной индукции B через определенную поверхность; P - магнитодвижущая сила (аналог
электродвижущей силы) параметр, определяемый как линейный интеграл от напряженности
магнитного поля H по замкнутому контуру. Интеграл равен полному току, охватываемому этим
контуром,
P Hd iS dS
где dλ – элемент контура интегрирования; IS – плотность тока.
Если не учитывать сопротивление обмотки постоянному току и ее активное сопротивление,
обусловленное потерями на гистерезис и вихревые токи, то импеданс Z электрической цепи и его
изменение ∆Z определяются индуктивным сопротивлением и будут равны
w2
w2 S
w2 S
Z
;
Z
.
R
M
где ω – частота питающего
тока, w – число витков обмотки.
Видно, что относительное изменение магнитной проницаемости сердечника / вызовет
соответствующее изменение импеданса датчика ΔZ/Z и соответствующее изменение напряжения
на нем.
269.
U в ых k ПUв ых k
dB
kг k
d
d
dt
dB
dB d
d
k
kг
dt
d dt
dt
270.
• Если первичная обмотка магнитоупругого преобразователя трансформаторного типа питаетсяпостоянным током, то он превращается в преобразователь индукционного типа. При измерении
таким преобразователем быстро изменяющихся сил во вторичной обмотке индуцируется ЭДС ,
значение которой определяется по формуле
dФ
d
e w2
dt
Cw2
dt
,
в которой w2 - число витков во вторичной обмотке; С – коэффициент пропорциональности,
зависящий от свойств материала магнитопровода и напряженности намагничивающего поля;
σ – механическое напряжение материала сердечника.
Основными характеристиками, определяющими качество магнитоупругих датчиков являются:
1.
магнитоупругая чувствительность SМ,;
2.
уровень допустимых механических напряжений MAX,;
3.
частотные характеристики нагружаемого измеряемыми силами сердечника.
• При исследовании динамических процессов, в которых измеряются F(t), характеризуемые
собственными частотами, для устранения инерционных погрешностей частота источника питания
датчика должна превосходить верхнюю частоту спектра F(t) в 10 раз. Повышение частоты источника
питания при постоянных активной мощности и магнитном потоке позволяет повысить напряжение
питания и, следовательно, величину выходного сигнала.
• Но повышение частоты источника питания возможно только до появления поверхностного
эффекта, при котором возрастает магнитное сопротивление цепи, приводящее к уменьшению
изменения этой величины, вследствие увеличения магнитных потерь. Поэтому при использовании
магнитопроводов датчиков из сплошного материала рекомендуются частоты не более 200 герц, а из
листового - 10 килогерц.
271.
Чувствительность магнитоупругих преобразователей.• Чувствительность SМ магнитоупругого параметрического преобразователя является его
основной характеристикой. В тех случаях, когда преобразователь используется для измерения
деформаций, то есть входной величиной является относительная деформация ( ℓ/ℓ) , то
SМ=( / )/( ℓ/ℓ) .
• Однако, в практической деятельности, входной величиной является сила, создающая
механические напряжения в сердечнике преобразователя, которые изменяют его магнитную
проницаемость. В этом случае чувствительность Sм магнитоупругого параметрического
преобразователя вычисляется по формуле
SМ =( / )/σ.
• Чувствительность SМ связана с магнитными параметрами , характеризующими внутреннюю
структуру материала сердечника. В частности, ее можно определять по формуле,
• где λS и ВS – соответственно магнитострикция и индукция
насыщения.
S M ( 2 S / BS2 )
• При оптимальной напряженности магнитного поля в материале сердечника чувствительность SМ
для таких ферромагнетиков как пермаллой и трансформаторная сталь достигает значений (6 10)10-9 м2/н.
• На величину SМ преобразователей существенно влияет поверхностный эффект.
При слабом поверхностном эффекте изменение сопротивления магнитного участка,
подвергшегося деформации, определяется выражением
ΔZ/Z ≈ Δμ/μ.
При резко выраженном поверхностном эффекте магнитное сопротивление участка
пропорционально корню квадратному из μ и поэтому
ΔZ/Z ≈ 0.5 (Δμ/μ).
272.
Погрешности магнитоупругих преобразователей.1. Погрешность, обусловленная магнитоупругим гистерезисом. Эта погрешность возникает от
невоспроизводимости значений параметров, характеризующих магнитные свойства преобразователя, такие как
I (намагниченность) и B при нагрузке и разгрузке. Для уменьшения этой погрешности следует проводить
тренировку преобразователя многократной нагрузкой и разгрузкой, проводя их при напряженности магнитного
поля, равной номинальной. Измерения следует проводить при напряженности поля большей значения ,
соответствующего максимальной магнитной проницаемости, При правильном выборе материала сердечника,
режима его работы и проведении тренировок погрешность может быть менее 1%.
2. Погрешность от нелинейности функции преобразования. У магнитоупругих преобразователей
функция преобразования, как правило нелинейная. Для устранения возникающей от этого погрешности
следует выбрать соответствующий интервал измерений и наиболее подходящий магнитный режим работы
преобразователя. При правильном выполнении этих рекомендаций можно сделать величину этой погрешности
допустимой.
3. Температурная погрешность. Изменения температуры преобразователя порождают:
а).
изменение активного сопротивления катушки; б). изменение начальной магнитной проницаемости; в).
изменение магнитоупркгого эффекта, т. е. зависимости намагниченности (или индукции) сердечника от
механических напряжений в нем. Поскольку, как правило, активное сопротивление значительно меньше
импеданса преобразователя, то первая погрешность пренебрежимо мала. Значения индукции и
магнитострикции с ростом температуры падают, а магнитная проницаемость меняет знак, Всегда можно так
выбрать материал и режим работы, чтобы эти погрешности взаимно компенсировались.
Мощность, развиваемая магнитоупругими датчиками достаточна для использования их без
усилителей. При измерении высоких давлений (более 10Н/мм2) они используются без дополнительных
преобразователей. .Допустимые напряжения в материале преобразователя при измерении сил σДОП= 50
МПа.
273.
Основы магнитоупругого эффекта.•Магнитоупругий эффект – это изменение намагниченности ферромагнитного тела при его
деформации.
•Термодинамически устойчивым состоянием ферромагнитного кристалла при отсутствии внешнего
магнитного поля и ниже точки Кюри является состояние с результирующей намагниченностью
равной нулю.
•Такое состояние является результатом взаимно противоположной ориентации самопроизвольной
намагниченности в отдельных доменах.
•Точка Кюри – это такая температура T = θ, при которой исчезают ферромагнитные свойства
ферромагнетиков. При температурах T > θ ферромагнетик превращается в парамагнетик
существенно изменяются его теплоемкость, электропроводность и другие параметры.
•Домен – это макроскопический участок объема ферромагнитного кристалла с однородной
самопроизвольной намагниченностью.
•Разделение ферромагнетика на отдельные взаимно противоположно намагниченные «домены»
обусловлено тем, что между элементарными магнитиками, то есть собственными магнитными
моментами электронов, действуют два типа сил: магнитные и «обменные».
•«Обменное» взаимодействие с расстоянием убывает быстрее магнитного. Если ферромагнетик разбить на
отдельные намагниченные участки, то окажется , что магнитные взаимодействия между соседними
областями стремятся ориентировать их антипараллельно (размагничивающее действие), а обменные силы
способствуют намагниченности соседних областей (взаимное намагничивающее действие) При этом магнитное
взаимодействие пропорционально объемам областей, а обменное их поверхностям.
274. Погрешности магнитоупругих преобразователей.
• В каждом ферромагнетике устанавливается такое разбиение на домены, котороесоответствует равновесию этих двух противоположных процессов и минимуму свободной энергии.
При этом направления векторов самопроизвольной намагниченности в различных доменах
обеспечивают результирующую намагниченность тела, равную нулю. Эти векторы
ориентируются параллельно или антипараллельно осям легкого намагничивания. Такими осями,
например, у железа являются ребра кубической ячейки кристаллической решетки, т.е.
кристаллографические направления 100, у никеля - диагонали кубической ячейки - направления 111.
• Состояние равновесия домена нарушается, при возникновении внешнего магнитного поля H, и
(или) внутренних механических напряжений .
• При прекращении действия внешнего магнитного поля, вследствие действия коэрцитивной силы,
сохраняется некоторая ориентация отдельных доменов, что проявляется как явление гистерезиса.
• Действующие на ферромагнетик упругие напряжения вызывают изменение межатомных
расстояний и ориентации областей самопроизвольной намагниченности в решетке кристалла,
что сопровождается макроскопическим изменением намагниченности тела и характера
зависимости между напряженностью и индукцией.
• Поскольку параметром, определяющим связь между напряженностью Н действующего на
объект магнитного поля и его индукцией В определяется магнитной проницаемостью μ, то в
качестве характеристики магнитоупругого эффекта принимается величина μ.
275. Основы магнитоупругого эффекта.
Изменение магнитных свойств ферромагнетиков при действии механическихнапряжений.
Материалы сердечников и магнитопроводов, из
которых изготавливаются магнитоупругие датчики
являются ферромагнетиками. Поэтому
взаимозависимости между их механическими,
магнитными, тепловыми и т. п. параметрами.
являются нелинейными.
Изменение электрических и магнитных свойств этих
материалов при механическом воздействии
описывается зависимостью намагниченности
(индукции) от напряженности магнитного поля, как
это изображено на рисунке 38.
Действие механических напряжений в
ферромагнетике деформирует его кривую
намагниченности (за счет изменения магнитной
проницаемости и взаимной или остаточной
индукции ВОСТ).
На рисунке видно изменение характера этой
зависимости и нелинейный характер зависимости
I(σ).
Магнитоупругость может быть линейной и
объемной . В первом случае, величина относительной
линейной деформации составляет 10-2... 10-6, во
втором - величина относительной объемной
деформации V/V достигает 10-5 (для инварных
сплавов).
I
H
σ
Рис. 38. Влияние упругого растяжения на
намагниченность никеля при комнатной температуре.
276.
При намагничивании ферромагнетиков магнитные силы проявляются когда напряженность
магнитного поля изменяется от нуля до насыщения, то есть при процессах смещения границ
между областями самопроизвольной намагниченности ( границ доменов) и вращения
магнитных моментов доменов.
Оба эти процесса приводят к изменению энергетического состояния кристаллической
решетки.
При этом изменяются равновесные расстояния между атомами решетки, что приводит к
деформация решетки, то есть магнитострикции – эффекту изменения размеров и формы
тела при намагничивании.
Это явление используется для создания магнитострикционных преобразователей:
вибраторов, резонаторов, фильтров и др.
Наибольшее распространение получили магнитострикционные преобразователив качестве
излучателей и приемников ультразвука.
Материалы , используемые для магнитострикционных и магнитоупругих датчиков: никель (
Ni ) и его сплавы, в том числе высокопрочные никелевые стали, сплавы Fe –Al и др.
Их основные параметры: плотность; модуль Юнга, определяющий резонансную частоту
датчика; магнитострикционное насыщение; коэрцитивная сила; удельное электрическое
сопротивление; коэффициент магнитомеханической связи.
277. Изменение магнитных свойств ферромагнетиков при действии механических напряжений.
Магнитострикция• Магнитострикция – это изменение формы и размеров тела при его намагничивании.
• В ферромагнетиках и ферримагнетиках (железе , никеле, кобальте, сплавах, содержащих эти
металлы, ферритах) этот эффект достаточно велик ((относительное удлинение Δλ/λ ≈ (10-5 - 10-3)) при
действии полей значительной напряженности Н.
• Численное значение магнитострикции – это относительное изменение длины стержня, обусловленное
воздействием внешнего магнитного поля. Следует заметить, что магнитострикционные и
магнитоупругие явления не однозначны. Одни ферромагнитные тела имеют положительную
магнитострикцию, т. е увеличивают размеры в направлении магнитного поля, другие –
отрицательную, т. е. уменьшают свои размеры в направлении магнитного поля
• Практически во всех ферромагнетиках наблюдается анизотропия магнитострикции, т. е. различное
по величине и по знаку (сжатие или удлинение) изменение формы и размеров тела в зависимости от
направления вектора напряженности Н (направления намагниченности) относительно
кристаллографических осей.
• Изменение магнитострикции в направлении поля называется продольной, а в перпендикулярном
направлении поперечной магнитострикцией. Вторая обычно меньше первой.
• В практических приложениях чаще встречается и используется линейная продольная
магнитострикция, при которой изменение размеров тела происходит в направлении поля. Однако в
области технического намагничивания в общем случае возникает объемная магнитострикция.
• Максимальная линейная магнитострикция кристаллов ферромагнетиков практически линейно
зависит от температуры в области ниже точки Кюри.
278.
Датчики внешнейинформации.
279.
Датчики внешней информации.• Датчики внешней информации предназначены для контроля за состоянием рабочей сцены и
объекта манипулирования промышленного робота. С помощью этих датчиков определяется
положение объекта манипулирования, его форма, геометрические и физические параметры.
• Датчики внешней информации должны обладать:
а) достаточной жесткостью, обеспечивающей высокую точность определения
заданных параметров.
• б) надежностью и и большим ресурсом работы;
• в) быть малогабаритными и иметь минимальную массу.
Используемые датчики внешней информации (можно разделить на три вида:
сенсоры слуха, сенсоры осязания и сенсоры зрения.
При помощи этих средств получается информация о геометрических и физических параметрах
исследуемого объекта и состоянии рабочей сцены,.
а) При распознавании объектов с помощью слуховых сенсоров сигналы воспринимаются от
объекта или от оператора, подаваемые голосом.
• б) Простейшими осязательными датчиками, служащими для обнаружения момента
соприкосновения захвата с объектом, являются контактные датчики, называемые тактильными
датчиками.
• в) Наиболее эффективной системой очувствления, является зрительная, обеспечивающая
получение основной доли информации о внешней среде.
• Получение и обработка этой информации осуществляется при помощи систем технического
зрения, которые устанавливаются на транспортных, технологических и других интеллектуальных
роботах.
280.
Тактильные датчики• Простейшими осязательными датчиками внешней информации, имитирующими осязательные
функции руки человека, являются тактильные датчики. Они предназначены для выполнения
следующих операций:
1. Обнаружения контакта захвата с объектом;
2. Определение координат и площади контактного пятна;
3. Измерение силы сжатия захвата, регистрация силового воздействия на площади пальцев захвата;
4. Определение ориентации объекта зажатого захватом;
5. Обнаружение направления проскальзывания объекта и измерение его смещения;
6. Определение механических свойств объекта по степени их деформации;
7. Распознавание объектов заданного класса по их тактильному образу.
• По характеру измерения параметров взаимодействия захвата с объектом манипулирования
тактильные датчики можно разделить на три группы: датчики касания, датчики контактного
давления и датчики проскальзывания.
• Датчики касания и давления предназначены для измерения одной и той же физической
величины – силы взаимодействия захвата и объекта. Они выполняются в виде отдельных
преобразователей или в виде матрицы с высокой плотностью распределения элементов.
• Отличие их в том, что первые имеют порог срабатывания и фактически являются релейными
датчиками сил, настроенными на заданные значения измеряемого параметра, а вторые непрерывно измеряют давление.
• Датчики проскальзывания предназначены для обнаружения движения объекта
манипулирования в захвате, направления и параметров этого движения.
281. Датчики внешней информации.
•Датчики, обладающие тактильной чувствительностью, в процессеработы
выполняют различные функции.
• Одни предназначены для поиска объектов манипулирования, другие – для
измерения силы давления пальцев захвата, необходимой для удержания объекта,
третьи - для определения размеров и т.д.
• Поэтому они располагаются в соответствующих местах, наиболее удобных для
выполнения заданных функций.
• Датчики поиска располагаются на наружной поверхности руки захвата,
силовводящие элементы этих датчиков имеют форму пластин и покрывают всю
внешнюю поверхность пальцев.
• В некоторых случаях на захвате располагаются различные датчики: контактные
и локационные.
• Матрицы датчиков давления и касания располагаются на внутренней
поверхности пальцев захвата.
• Регистрация прикосновения или измерение давления в местах контакта пальцев
захвата с поверхностью объекта обеспечивает возможность его опознавания,
определения ориентации относительно захвата, силы сжатия захвата и фиксации
проскальзывания объекта относительно пальцев. В последнем случае используются
специальные датчики проскальзывания
282. Тактильные датчики
• Особенность эксплуатации тактильных датчиков – необходимость их непосредственногоконтакта в процессе работы с исследуемыми объектами, в том числе с препятствиями,
возникающими на пути движения захвата.
• Поэтому к ним предъявляются повышенные требования: они должны иметь высокую
надежность, прочность, износостойкость, пыле- и влаго - защищенность, обеспечивать высокую
стойкость к механическим и температурным перегрузкам и т. д
Выполнение этих требований. в основном, определяется выбором преобразователя.
• Датчики контактного давления , установленные на внутренних поверхностях пальцев захвата,
используются для регулирования силы сжатия объекта, что является очень важным при работе с
легко повреждаемыми и хрупкими объектами.
• Датчики контактного давления, установленные в сочленениях пальцев захвата, позволяют
определять усилие сжатия объекта, выполнять операции сборки и завинчивания путем поисковых
движений захвата с зажатой деталью, для определения направления минимального усилия в
процессе сборки и продолжения операции в этом направлении.
• Определение вектора силы давления P в трехмерном пространстве производится путем
обработки сигналов множества датчиков, объединенных в матрицу. Матричные системы датчиков
позволяют определять форму объекта при его «ощупывании».
• Датчики проскальзывания, установленные на внутренних поверхностях пальцев захвата,
регистрируют сигналы об относительном перемещении зажатой захватом детали, которые
используются для изменения зажимающего усилия и предотвращения выскальзывания детали из
захвата
283.
Схемы тактильных датчиков.• Тактильные анализаторы служат для
количественного определения размеров и формы
объектов.
• Простая схема на рис. 38 включает рецептор – блок
пьезоэлектрических элементов и преобразователь
давления.
• Рецептор определяет распределение давления на
объект: это давление пьезоэлементами
преобразуется в электрические сигналы.
• При обработке этих сигналов производится
выделение контура объекта.
• Внутренний потенциал рецептора сравнивается с
порогом, установленным в УП. В случае его
превышения выход рецептора становится выходом
генератора функций.
• Электретный датчик, изображенный на
рис. 39
обладает высокой линейностью.
Его основная деталь мембрана (3) скомпонована из
полимерных пленок, толщиной (13 – 15) мкм,
металлизированных алюминием (2). Мембрана (3),
на которую подается заряд, создающий потенциал
100 В, размещается в захвате (5) между эластичным
защитным слоем (1) и проводящей пластиной (4), на
расстоянии 70 мкм от нее.
• Датчик работает как конденсатор, при изгибе
мембраны изменяется его емкость и, следовательно,
его потенциал, который является выходным
сигналом.
Рис. 38. Тактильный анализатор. а) –физическая модель;
б) – схема; Р –рецептор; ГФ – генератор функций;
УП – устройство управления порогом
F
Рис. 39. Схема тактильного датчика электретного типа
284.
• В качестве первичных тактильных преобразователей используются, тензометрические, манитоупругие,емкостные, электромагнитные. Кроме этого, применяются преобразователи из графита и композиций графита с
металлами и полимерами, а также малогабаритные микропереключатели
• Последние обеспечивают высокую точность и возможность работы с неметаллическими объектами. Наряду с
пьезоэлектрическими пленочными преобразователями применяются электретные сенсорные устройства,
обладающие высокой линейностью (Рис. 39.)
Достаточно надежными являются датчики давления, создаваемые на основе эластомеров и композиционных
материалов с волокном из графита. Схема такого датчика приведена на рис. 40 .
• Два тонких цилиндра (электрода) из проводящего селиконового
каучука образуют преобразователь, В ненагруженном состоянии
площадь контактного пятна между электродами минимальна, а
сопротивление его велико.
• Под действием измеряемой силы F электроды прижимаются
друг к другу и деформируются. Площадь контактного пятна
увеличивается, сопротивление убывает, выходное напряжение
UВЫХ изменяется пропорционально величине силы F .
• Основной недостаток таких преобразователей – появление
«усталостных» изменений материала в виде микротрещин, что
сопровождается падением удельного сопротивления
преобразователя и выходом его из строя.
• В качестве материала для датчиков такого типа используются
угольные нити, каждая из которых представляет пучок тысяч
волокон диаметром (7 – 30) мкм.
F
RН
UВЫХ
Рис. 40.Схема преобразователя из
селиконового каучука
285. Схемы тактильных датчиков.
Электрическое сопротивление в точке соприкосновения таких нитей велико, вследствие высокой
чистоты материала, Изменение сопротивления при действии нагрузки происходит плавно, вследствие
суммарного действия контактирующих волокон. Углеволоконные датчики целесообразно
использовать при давлениях P ≤ 200 МПа.
Конструктивно тактильный датчик из углеродного волокна выполняется как кусок ткани,
изготовленной из параллельно расположенных четырехмиллиметровых чередующихся нитей
стекловолокна и графита поперечно переплетенных стекловолокном. Одна из пластин накладывается
на другую так, что волокна графита в них пересекаются под прямым углом, образуя тактильную
пропорциональную матрицу.
Другой конструктивной формой тактильных углеволоконных датчиков является «войлочная»
структура. При ее изготовлении войлочные пряди разделяются на отрезки длиною 2.5 мм,
укладываются в форму и уплотняются. Полученный элемент не имеет строгой механической
структуры. Его номинальная толщина 1 мм; электрическое сопротивление ненагруженного элемента ,
площадью 1 см2 ≈ 200 ом. Из таких заготовок можно вырезать тактильные преобразователи
различной формы: шайбы, пластинки, цилиндры и т. п.
Электретные тактильные датчики изготавливаются из материалов, перманентно сохраняющих
электрический заряд. Их можно создавать из полимерных пленок (например, из тефлона толщиной
(13 – 15) мкм.), металлизированных алюминием. Схема такого датчик представлена на рисунке 39.
В процессе изготовления датчика пленочной мембране (3), металлизированной алюминием при
помощи электронного луча или термическим способом сообщается электрический заряд,
соответствующий электрическому потенциалу в 100 В, Мембрана размещается в захвате (5)
манипулятора между эластичным защитным слоем (1) и проводящей пластиной (4) на расстоянии 70
мкм от нее. По принципу действия датчик подобен конденсатору. При изгибе мембраны под
действием объекта изменяется емкость датчика и , следовательно, его потенциал, обусловленный,
существующим на нем зарядом
286.
• Манипулятор, оснащенный тактильными датчиками в определенной мере обладает «чувством осязания». Этоособенно важно при манипулировании объектами с малой твердостью, когда необходима непрерывная
информация о значении усилия зажима.
• Процесс распознавания образа объекта роботом с тактильным анализатором состоит из следующих этапов:
определения количественных данных о размерах или форме объекта, качественное описание характера
поверхности объекта, описание объекта по полученной информации, Модель тактильного анализатора включает
рецептор Р и преобразователь давления ПД в электрические сигналы. Рецептор, являющийся блоком
пьезоэлектрических элементов, регистрирует распределение давления по поверхности объекта, превращая
действующие на него усилия в электрические сигналы. В анализаторе при анализе полученной информации
происходит выделение контура тактильного образа. (Рис 38.) Тактильный анализатор может быть выполнен из
порошкообразного графита, пенопластов с графитовым наполнением, кремниевой резины, армированной
графитом или металлом.
• Датчик, выполненный из токопроводящей резины, содержит множество контактов, расположенных на пальцах
захвата, общий контакт которых представляет гибкую герметическую оболочку из токопроводящей резины с
низким омическим сопротивлением. Ответные контакты нанесены на поверхность пальцев. При захвате объекта
наружная резиновая оболочка прогибается, обеспечивая многоточечный контакт элементов с профилем объекта,
информация об усилиях направляется в систему управления манипулятором.
• Существуют различные типы матричных тактильных датчиков: игольчатые, емкостные, пьезоэлектрические,
резистивные и др. На рис 41 приведена схема резистивной матрицы.
1
• Матрица состоит из двух наборов электродов, представляющих параллельные
ряды, расположенные на двух слоях, причем электроды верхнего слоя (1)
перпендикулярны электродам нижнего слоя (2). В рассматриваемой схеме между
слоями электродов находится пьезоэлектрический материал (3). Каждая точка
пересечения электродов является измерительным преобразователем, несущим
информацию о давлении в ней.
• Аналогичная матрица их угольных нитей не содержит промежуточного слоя
между перпендикулярными нитями.
Рис. 41 Схема резистивной
матрицы.
287.
Бесконтактные датчики.• При эксплуатации роботов, как правило, большое значение имеет быстрота выполнения
операций, что связано с большими скоростями движения робота, манипулятора и захвата.
• При этом возникает проблема сохранения систем робота и объекта манипулирования при
осуществлении контакта между ними.
• Решение этой проблемы предполагает использование датчиков, определяющих
параметры движения взаимодействующих объектов без контакта с ними, т. е. бесконтактных
датчиков.
• Бесконтактные датчики представляют информацию о наличии препятствий на
предполагаемой траектории робота (манипулятора), что позволяет своевременно изменить
траекторию и избежать столкновения, а также выдать необходимые данные для торможения
манипулятора и захвата, предшествующие их контакту с объектом манипулирования.
• Бесконтактные датчики, используемые для дистанционного измерения параметров
сцены, характеристик движения объекта манипулирования и систем робота, представляются
двумя группами:
1. Локационными системами; 2. Системами технического зрения.
• Информацию о параметрах движения объекта можно получать непосредственно от
объекта. Она передается сигналами, генерируемыми объектом, если на нем имеется
излучатель, или создаваемыми специальным, размещенном на роботе устройством
облучающем объект. В последнем случае информация об объекте передается отраженным от
него сигналом.
• Эти сигналы воспринимаются «приемником», который анализирует их и определяет
характер движения объекта относительно робота.
• Для выполнение этой работы: создания, передачи и приема сигналов используются
преобразователи: пьезоэлектрические, волоконноптические, вихретоковые,
феррозондовые, сцинтилляционные, полупроводниковые, индукционные, электронно оптические, приборы с зарядовой связью и др.
288.
Локационные датчики.• Системы очувствления промышленных роботов методами локации позволяют получить информацию о
состоянии и свойствах объекта манипулирования и внешней среды (сцены) и обеспечить целенаправленное
и безопасное движение манипулятора. Ими обеспечивается измерение таких параметров, как расстояние
до объектов, скорость движения, их размеры, обнаружение препятствий, а также исследование
механических, электрофизических, акустических и других параметров объектов.
• Локационные датчики представляют систему передатчик – приемник, которая строится на основе
определенного физического явления.
• В зависимости от физической природы они бывают акустическими, в которых для передачи информации
используются звуковые и ультразвуковые волны, распространяющиеся в атмосфере; тепловые, оптические,
электромагнитные, использующие электромагнитные колебания различных частот; магнитные, построенные
на использовании различных свойств магнитных полей; пневматические, использующие потоки газа и др.
• Датчиками локации измеряются: а) – расстояния до объектов манипулирования, б) – линейные и угловые
координаты объектов; в) – скорости перемещения объектов, а также обнаруживаются препятствия в зоне
деятельности манипулятора.
• Кроме этого, некоторые локационные системы регистрируют зазоры, перекосы, внутренние дефекты
(или изменение характеристик материала объекта), площадь и толщину покрытия, твердость и некоторые
механические, электрофизические и другие свойства объектов.
• Локационные датчики могут быть
1. Информационными для формирования сигналов, управления работой манипулятора;
2. Датчиками безопасности , используемыми для защиты исполнительного органа робота от столкновений.
• Первые используются для определения параметров движения объекта в выбранной системе координат;
вторые – работают в релейном режиме и формируют сигналы об объектах типа «да – нет».
• Носителями полезной информации об объектах являются электрические сигналы, получаемые
приемником.
• Измеренные значения параметров представляются пространственными и временными
характеристиками этих сигналов: амплитудой, фазой, частотой, временной задержкой, которые
используются порознь и в комбинациях.
• Так как сигналы могут быть непрерывными или импульсными, то соответственно и локационные датчики
бывают непрерывного или импульсного действия
289. Бесконтактные датчики.
Акустические ( ультразвуковые) локационные датчики.•Акустические локационные системы (АЛС) классифицируют по пяти основным
признакам:
•1) по назначению — дальномеры, охранные устройства и системы безопасности,
дефектоскопы и томографы;
•2) по типу первичного преобразователя — пьезоэлектрические, магнитострикционные и
электростатические;
•3) по характеру частотного спектра сигнала — широкополосные и резонансные;
•4) по типу модулирующего воздействия — непрерывные и импульсные;
•5) по избирательности — интерференционные и с широкой диаграммой направленности.
• АЛС в основном работают в ультразвуковом диапазоне. Нижняя граничная частота ƒн
ультразвука, отделяющая ее от области слышимого звука, определяется субъективными
свойствами человеческого слуха и является условной. Принимают ƒн= 20 кГц). Верхняя
граничная частота ƒв ультразвука обусловлена физической природой упругих волн,
которые могут распространяться лишь при условии λ>>dcв, где dсв— длина свободного
пробега молекул в газах или межатомное расстояние в жидкостях и твердых телах.
Следовательно, ƒв=1/dсв. Для газов при нормальном давлении ƒв =109 Гц, а для жидкостей и
твердых тел достигает 1013.
• Для АЛС скорость распространения сигналов в газах составляет 0,2... 1,5 км/с, в
жидкостях — 0,5...2 км/с, в твердых средох — 2...8 км/с. Такие малые скорости, а
следовательно, малые длины волн намного повышают разрешающую способность
ультразвуковых методов по отношению к электромагнитным при равных частотах.
290.
• В робототехнике и мехатронике под АЛС понимают совокупность акустических датчиков исредств первичной обработки информации, предназначенных для определения геометрических и
физических характеристик объектов в зоне контроля, а также их ориентации относительно
выбранной системы координат.
• В робототехнике локационные системы очувствления обычно реализуют в соответствии с
концепцией «очувствленная рука», при этом АЛС включают в контур управления роботом, а
акустические датчики монтируют на каждом звене кинематической цепи.Акустическая локация
основана на способности акустических (упругих) волн высокой частоты ( f > 20 Кгц)
распространяться в газовых, жидких и твердых средах и отражаться от существующих в них
неоднородностей.
• Для излучения, приема и измерения акустических колебаний используются пьезоэлектрические,
магнитоупругие и магнитострикционные преобразователи.
• Локационные акустические датчики (ЛАД), обладая широким полем излучения и большой
• дальностью действия, используются в системах:
1. Поиска и обнаружения объекта;
2. Измерения дальности до объекта;
3. Определения угловых и линейных координат объекта в заданной системе координат;
4. Измерения линейной скорости движения объекта, рассматриваемого в виде модели –
материальной точки.
• Они также используются для обнаружения внутренних неоднородностей, в том числе каверн и
твердых предметов, толщины покрытий поверхностей и акустических свойств объектов.
• Последнее позволяет идентифицировать материал поверхности объектов, а при достаточно
высокой точности измерения расстояний и геометрических параметров объектов, сравнительно
просто, в реальном времени, получать интегральную оценку некоторых характеристик формы
поверхности (таких как угол наклона ее отражающего участка), и проводить классификацию
объектов.
291.
• Характеристики ЛАД, в основном, определяются частотой излучения. Разрешающаяспособность, минимальное определяемое расстояние и перемещение, зависят от
используемой частоты излучения.
• Чем выше частота, тем лучше эти параметры. Но с увеличением частоты быстро растет
их поглощение (затухание) и, следовательно, уменьшается дальность действия при
неизменной мощности излучателя.
• Акустические локационные датчики эффективнее оптических и электромагнитных при
работе в газовых средах, затрудняющих или исключающих применение оптических
средств: наличие пара, задымленность и запыленность воздуха и др.
• Кроме того, оптические и электромагнитные датчики в силу очень большой скорости
света при определении малых расстояний требуют специальных измерителей времени.
Так для измерения расстояния в 1 см необходимо измерить время Т=1/3 1010 =3.3 10-11 с.,
что для измерений с погрешностью в 1% требует разрешения 10-13 с.
• При помощи локационных акустических датчиков можно измерять:
• Расстояния, линейные перемещения а) в воздухе – (2 – 2000) мм.; б) в воде – 0.5 – 10000)
мм.; с погрешностью менее 2%.
• Скорости перемещения а) в воздухе – от 2 мм/с.; б) в воде – от 10 мм/с.; с погрешностью
менее 2%.
• Схему действия локационных акустических датчиков в общем виде можно представить
следующим образом ( Рис 41.)
• Генератором формируются зондирующие импульсы, содержащие определенное число
колебаний выбранной частоты, которые подаются на излучающий преобразователь.
292.
Функциональная схема акустического локационного датчика.t0+∆t
Объект
1
2
t0+T+∆t
4
5
6
t0
t0+T
t0
3
7
t0+T
8
Рис. 41. 1 - Преобразователь; 2 – Коммутатор; 3 – Генератор; 4 – Усилитель; 5 – Формирователь;
6 – Преобразователь – формирователь; 7 – Блок сравнения; 8 – Генератор стандартных импульсов.
T – длительность импульса, излучаемого генератором, ∆t – время прохождения передним фронтом импульса двойного расстояния от
объекта до излучателя.
•. Практически, электрический сигнал подается на обкладки пьезоэлемента, который деформируется и создает цуг
звуковых колебаний в заданном импульсе излучения.
• Импульс ультразвуковых колебаний, созданных излучателем, направляется на исследуемый объект, и
отразившись от него через коммутатор поступает на приемный преобразователь, роль которого при наличии
коммутатора исполняет излучатель.
• Принятый сигнал подвергается аналоговой обработке (усиление, заданное преобразование и др.), а затем
преобразуется в цифровой код,
• В соответствии с заданной программой производится обработка полученной информации для передачи ее в
систему управления работой манипулятора.
293.
Акустическая система измерения скорости.Для измерения скорости сближения обследуемого объекта с
локационной системой, расположенной на манипуляторе,
используется эффект Доплера, состоящий в изменении
воспринимаемой частоты колебаний при относительном движении
источника и приемника волн. Если источник и приемник
сближаются, то принимаемая частота увеличивается , если
удаляются, то уменьшается.
Например, если неподвижный источник излучает акустические
волны с частотой f0 ( Рис. 42 ), то приемник, движущийся по прямой
со скоростью V к излучателю будет воспринимать волны с частотой
f1
a
v
V
Пр.
Из.
(а
V1
a v
v
(1 ) f 0
aT
a
Пр.
(б
Рис.42. Схема работы излучателей.
• где а – скорость звука в среде; λ – длина волны; T – период колебания. Частота, воспринимаемая приемником,
отличается от излучаемой на величину
v f
Δf = f1 – f0 = (v/a)f0
Отсюда следует, что скорость приемника равна
a
f0
• Если приемник неподвижен, а источник движется к нему со скоростью v1, то за время одного периода T источник
пройдет путь S = v1 T. Приемник это воспримет как укорочение длины волны λ = аT, излучаемой источником на
величину S. Им будет восприниматься волна с длиной
λ1 = λ – s = aT-S =T( a – V1 ) и соответствующей частотой
f2
a
v
f1 (1 1 ) 1.
T (a v1 )
a
294.
Если излучатель частоты f0 и приемник совмещены и неподвижны, а излучаемые волны направляются на
движущийся к ним со скоростью V объект, то приемником воспринимаются колебания, отраженные от
движущегося объекта. Частота этих колебаний будет
1 V a
f0
1 V a
2V a
f
f0.
1 V a
f10
и отличается от излучаемой f0 на величину
Отсюда следует, что скорость движущегося объекта может быть определена через изменение частоты
колебаний
f f 0
V
.
a 2 f f 0
В практике для измерения скорости объекта используются различные системы, аналогичные изображенной
на рис. 43.
В рассматриваемой системе совмещены приемник и излучатель. Излучатель в направлении на движущийся
объект направляет волны сжатия газа, образующиеся за счет гармонических колебаний пьезоэлектрического
датчика, возникающих от воздействия на него электрического сигнала
U (t ) ACos t
где А – амплитуда, ω – частота колебаний.
Волны сжатия отражаются от объекта и поступают на вход пьезоэлектрического датчика, где превращаются в
электрические сигналы, описываемые соотношением
U (t ) ACos( д )t ,
где
д 2(v a) - доплеровская добавка частоты
295. Акустическая система измерения скорости.
Этот сигнал поступает в смеситель системы (4).
На выходе системы существует напряжение U, пропорциональное измеренному значению доплеровской
частоты, которое является сигналом, управляющим работой генератора (7). Оно поступает в генератор на выходе
которого вырабатываются колебания электрического напряжения
U Г (t ) BCos 1t ,
где ω1 = ω – ωПР + ωУ;
– частота, вырабатываемая генератором;
ωУ= КГU – частота управляющего сигнала U;
КГ- коэффициент пропорциональности,
которые поступают в смеситель.
ωПР
Там образуется сигнал
U СМ (t ) АBCos 1t ,
который поступает в частотный
дискриминатор (5), настроенный на частоту ωПР.
Последний выдает напряжение UД , равное
UД= КД(ωД – ωУ),
где КД – коэффициент пропорциональности.
Фактически UД - это сигнал рассогласования:
если
UД= 0,
то
ωД= ωУ
и на выходе системы регистрируется значение
доплеровской частоты, по которому определяется
скорость движения объекта.
2
V
1
3
4
5
7
Рис. 43.
Схема измерителя скорости.
1.- Объект, 2. –Излучатель. 3. – Приемник.
4 – смеситель, 5. –частотный дискриминатор.
6. – Фильтр. 7. - Генератор
6
U
296.
Эхо – метод.• Работу акустического локационного датчика по
определению расстояния до объекта можно
проиллюстрировать на примере адаптивного
робота, используемого в СССР, изображенного на
рис.44.
• На каждом из двух пальцев захвата установлено
4 – е датчика: три типа а) по всем направлениям и
один торцевой.
• Торцевые датчики измеряют расстояния до
объекта и решают задачу неведения и точной
установки захвата над объектом, используя
принцип «стереофонической» ультразвуковой
локации.
• Функциональная схема такого датчика
локального наведения манипулятора изображена
на рис 45 .
• Датчик состоит из генератора (3),
вырабатывающего короткие импульсы высокого
напряжения, которые через коммутатор (2)
поступают на ультразвуковой преобразователь (1)
(конденсаторный микрофон).
• Его мембрана деформируется и излучает
импульс ультразвуковых колебаний, который после
отражения от объекта принимается тем же
преобразователем, который коммутатор отключает
от генератора и соединяет с усилителем –
формирователем (4), размещенным в пальце
захвата
а
Рис. 44. Захват манипулятора с локационными
датчиками
о
1
2
4
7
3
5
6
Рис.45. Функциональная схема датчика
локального наведения манипулятора.
297. Этот сигнал поступает в смеситель системы (4). На выходе системы существует напряжение U, пропорциональное измеренному значению
В усилителе – формирователе сигнал превращается в частотно модулированный импульс, количественное
значение характеристик которого соответствует требованиям деятельности манипулятора. Этот сигнал
рассматривается как выходное значение датчика.
Для получения регистрируемых данных используется схема сравнения (6) полученного импульса с двумя
пороговыми эталонами. Порог сравнения определяется длительностью импульсов эталонного генератора (7), с
которыми полученный импульс сравнивается в блоке (6).
Частота излучения колебаний таким датчиком равна 35 КГц: измеряемые расстояния (10 – 300) мм.;
величина диаграммы направленности 600; погрешность измерений порядка процентов.
Для наведения захвата на объект используется принцип «стереофонической»ультразвуковой локации. Один
из вариантов такого устройства содержит два идентичных канала измерителей расстояний, аналогичных выше
описанному.
Для определения требуемого положения захвата торцевые локационные преобразователи определяют свои
расстояния от заданной точки на поверхности объекта, разность измеренных расстояний h1 и h2 используется как
сигнал рассогласования. Знак рассогласования определяет направление движения захвата, а величина – требуемое
перемещение.
Датчики для определения расстояния до объекта строятся на различных принципах. Наиболее простым, а
поэтому широко распространенным является метод измерения времени прохождения Δt прямого и отраженного
сигналов. Если определяется расстояние от объекта до датчика L, то, учитывая, что скорость распространения
ультразвуковых волн а известна, измерив Δt можно определить расстояние по формуле:
L=a Δt /2.
В приборах для определения расстояний используется импульсное и непрерывное излучение. При
использовании прямоугольных импульсов определяемый промежуток времени Δt - это время между передними
фронтами излученного и принятого импульсов. Оно легко может быть измерено с помощью счетчика импульсов.
298. Эхо – метод.
• При использовании непрерывного излучения сигналов синусоидальной формы, время Δtопределяется как разность фаз колебаний в моменты приема и начала излучения.
• Если в момент t = t0 начала излучения фаза колебания равна φ0, то за время прохождения сигнала до
объекта и обратно Δt = tK - t0, где tК - момент приема отраженного сигнала, фаза принимаемого сигнала
изменится на величину Δφ = φК – φ0, где φК – соответствует tК. (Рис.46 )
• Расстояние 2L проходится передним фронтом волны сжатия за время Δt , в течение которого фаза
изменяется на величину Δφ, что соответствует 2L/λ, периодов ( где λ = а/f – длина волны).
• Поскольку длительность периода колебаний равна 2π, то изменение фазы Δφ содержит 4πLf/a
периодов, то есть
Δφ = 4πLf/a .
• Отсюда
• где ω = 2πf – угловая частота,
L
a
a
,
4 f
2
• а разность фаз Δφ измеряется при помощи цифрового фазометра.
Δφ
φ0
Рис.46. Измерение фазы колебаний .
φК
299.
Системы технического зрения.(Общие сведения).
• Система Технического Зрения (СТЗ) предназначена для автоматического распознавания,
определения координат, контроля внешнего вида объектов произвольной формы и может быть
использована в технике, медицине и научных исследованиях.
• Среди систем адаптации промышленных роботов системы технического зрения (СТЗ) обладают
наибольшей информативной емкостью, обеспечивая систему управления промышленного робота
(ПР) информацией о параметрах и свойствах объектов манипулирования и рабочей сцены, а также
планируют и организуют работу ПР.
• В понятие системы технического зрения входит комплекс технических средств и программных
средств преобразования, анализа и обработки растровой и матричной информации, получаемой с
помощью специальных датчиков.
• Системы адаптации промышленных роботов, оснащенных СТЗ, должны решать следующие
основные задачи:
1. Проводить анализ ситуации на рабочей сцене: определять все объекты, расположенные там, их
координаты, ориентацию и связи в выбранной системе координат.
2. Используя полученные данные планировать действия манипулятора по организации
предписанных работ;
3. Рассчитывать траектории перемещения захвата и звеньев манипулятора в соответствии с
полученной картиной рабочей сцены.
4. Все задачи должны решаться с учетом реального масштаба времени, так чтобы их выполнение не
оказывало существенного влияния на темп работы ПР.
300.
Основные функции СТЗ.По выполняемым функциям СТЗ делятся на распознающие, измерительные и
обзорно – информационные. Как правило, в одной СТЗ сочетается несколько функций.
Распознающие и измерительные СТЗ применяются на операциях контроля
качества, классификации и сортировки неподвижных и движущихся объектов.
Например , они обеспечивают выполнение операций, при которых манипулятор берет
заданную деталь с движущейся ленты конвейера, загружает ее в определенную тару
или переносит на место , определенное технологией процесса, или производит сборку
узла машины, окраску ее и др.
Измерительные системы, кроме определения геометрических параметров объекта,
вычисляют расстояние до объекта, определяют и преобразуют координаты объекта и
его деталей, представляют сведения об ориентации и др.
Обзорно – информационные СТЗ служат для организации технологического
процесса на основе анализа результатов, полученных от осмотра рабочей сцены.
Например, на основе полученных при осмотре данных, определяются свободные для
движения ПР и манипулятора свободные проходы и возможные преграды.
• Операции по формированию, анализу и идентификации изображения объекта
осуществляются процессором.
301. Системы технического зрения.
• Изображение формируется в его памяти в виде матриц градаций яркости нарассматриваемом участке рабочей сцены. На этапе формирования изображение
подвергается предварительной обработке (сглаживанию, контрастированию,
фильтрации и др.) для улучшения его качества.
• На этапе анализа составляются описания двумерных и трехмерных сцен с объектами
на них. Для этого применяются различные процедуры сегментации изображений, из
которых наиболее информативными и часто применяемыми являются алгоритмы
выделения контуров объектов (например, на основе пространственного
дифференцирования, сравнение градиента с заданным порогом, свертки и т. п.) и
алгоритмы расширения областей.
• Идентификация изображений состоит в объединении результатов анализа описаний
или признаков с геометрическими данными объектов. Обычно символьное описание
содержит сведения о типе, положении и ориентации объекта, в поле зрения датчика,
которое используется для сопоставления идентифицируемой сцены с символьными
моделями (эталонами), хранящимися в памяти ЭВМ.
• Одной из центральных задач идентификации является распознавание объекта по
совокупности характерных признаков.
302. Основные функции СТЗ.
Признаки идентификации. Определяющим фактором для выполнения функций СТЗ в
реальном времени, являются признаки по которым производится идентификация объектов.
• В СТЗ промышленных роботов применяются упрощенные методы идентификации по
геометрическим признакам объектов, по их характерным конструктивным элементам (число и
расположение отверстий, выступы и т п.). Такие признаки идентификации формируются в процессе
обучения ПР и хранятся в памяти процессора, как эталоны, с которыми сравниваются аналогичные
признаки, определенные в процессе работы системы.
• Перспективными в работе СТЗ являются самообучающиеся алгоритмы, которые определяют
признаки идентификации на этапе обучения робота в процессе нескольких предъявлений объекта
СТЗ. Иногда эталонами служат не признаки, а шаблоны изображения. Идентификация
производится наложением изображения на шаблон. Положение объекта определяется по
координатам его бинарного силуэта, ориентация – по характерному признаку.(отверстию, форме
уступа, радиусу скругления и т. п .
• В СТЗ осуществляется тесная взаимосвязь технической и программной частей системы. Выбор
метода идентификации объектов может быть определяющим для схемного решения всей системы и
наоборот, необходимость использования некоторых видов датчиков может однозначно задать
алгоритм преобразования информации.
• Иногда в качестве признаков идентификации в СТЗ используются специально нанесенные на
объект метки, которыми могут быть символьные надписи, геометрические фигуры, штриховые
коды, цветовой контраст.
303.
. Каждый символ стилизованной надписи представляется двоичным числом с
разрядностью , соответствующей количеству символов тарифной сетки. Штриховой
код – это система параллельных линий разной толщины, с различным расстоянием
между ними. При сканировании и преобразовании его в двоичный код последний
несет информацию об условных знаках и цифрах.
• Применение стилизованных надписей и кодов требует нанесения стартовых,
центровочных и финишных меток для синхронизации процесса считывания и
обработки информации об объектах, движущихся перед датчиком. Для считывания
штрихового кода используются методы телевизионного (при большом допуске
смещения положения штрихового кода), лазерного сканирования, а также
прожекторный метод с применением цветных штриховых кодов.
• При определении цвета штрихов кода прожекторным методом используется
датчик цвета, основными элементами которого являются три цветовых фильтра
(красный, синий, зеленый) и расположенные за ними три фотодиода. Объект, цвет
которого подлежит определению, освещается прожектором, а отраженный световой
луч падает на чувствительную поверхность датчика. Три выходных сигнала
преобразуются в цифровую информацию, которая обрабатывается
микропроцессором.
• Напряжение, поступающее с каждого диода зависит от цвета фильтра и цвета
объекта. Датчик различает два близких друг к другу цвета путем сравнения цвета
объекта с цветами заложенными п память процессора.
304.
Основные параметры СТЗ.• Помимо быстродействия СТЗ характеризуется:
1. Числом элементов дискретизации видеосигнала;
2. Числом градаций яркости видеосигнала;
3. Контрастом между фоном и объектом;
4. Освещенностью рабочей сцены;
5. Формой, размерами и количеством располагаемых на рабочей сцене объектов
манипулирования;
6. Наличием возможности оперативного изменения алгоритмов идентификации в
зависимости от изменения состава и свойств объектов, а также от изменения
технологического процесса.
а)
Число элементов дискретизации видеосигнала СТЗ, в основном определяется
видом и характеристиками применяемого видеодатчика;
б)
Число градаций яркости видеосигнала, в большинстве используемых СТЗ,
для упрощения системы и сокращения времени и объема информации, подлежащей
обработке, принимается равным 2 – м уровням сигнала ( белому и черному), которые
преобразуются в дискретные значения цифрового сигнала («ноль» и «единица»).
Такое изображение объекта называется бинарным или двоичным. Но чем
выше требования к точности идентификации изображения, тем больше необходимое
число градаций яркости видеосигнала.
305.
В большинстве робототехнических систем применяются алгоритмы,предназначенные для работы с бинарными изображениями, вследствие необходимости
сокращения времени обработки информации.
Если в бинарных системах каждая точка описывается черным или белым цветом,
то в много градационных системах точки изображения могут относиться к полутонам.
В бинарных системах объекты наблюдаются в отраженных или проходящих лучах;
изменение направления освещения позволяет получить тени, по которым можно судить
о высоте объекта , представленного на плоскости.
Поэтому, хотя обработка видеоинформации в бинарных системах проще и
производится быстрее, много градационные системы позволяют получить значительно
больше информации об объекте, что особенно важно, поскольку в практике нужны
зрительные системы, оперирующие с трехмерной информацией.
в) Для СТЗ, работающих в диапазоне световых волн, важное значение имеет
контраст между объектом и фоном , на котором получается его изображение. Контраст
создается осветительными устройствами, обеспечивающими для СТЗ наилучшие
условия освещения рабочей зоны
306. Основные параметры СТЗ.
Примером оптимальных условий освещенности служит организация «бестеневой»сцены в рабочей зоне, подсветка зоны в заданном диапазоне спектра для контрастного
выделения некоторых объектов и др.
г) Для получения трехмерной информации используются методы структурного
освещения, триангуляция и др. Системы, оперирующие с объемной информацией, в
меньшей мере подвержены влиянию изменений внешнего освещения, уменьшению
контраста и т. п; они обеспечивают однозначное определение двух декартовых координат.
д) Применение таких систем – извлечение сложенных навалом в бункере различных
деталей, роботизированная сварка.
е) СТЗ оперируют с объектами, расположенными на рабочей сцене раздельно.
Изменение параметров идентифицируемых объектов в больших пределах связано с
переналадкой оптической системы.
ж) Возможность изменения оператором алгоритмов обработки в связи с заменой
объектов или технологического процесса может быть реализована различными
аппаратными средствами. Например, памятью в микропроцессоре, входящем в СТЗ,
сохраняющей алгоритмы обработки в виде законченных процедур программных
модулей, последовательность включения которых может быть задана с пульта
управления СТЗ.
307.
Режимы работы СТЗ.• Рассматриваются три режима: настройка, обучение , рабочий.
• В процессе настройки устанавливается камера, выбирается порог бинаризации (число
уровней градации) и пространственная калибровка. В первую очередь, формируют
изображение рабочей сцены, соответствующее заданным характеристикам.
• Для этого управляя некоторыми параметрами видеодатчика: изменяют фокусировку,
положение камеры, раскрытие диафрагмы, изменение чувствительности, меняют
объективы и др. Управление параметрами при этом происходит по результатам визуальной
обработки информации и состоит из операций: а) поиск объектов в поле зрения; б)
настройка по яркости и контрасту.
• Процесс поиска объектов основан на размещении светлых объектов на темном фоне.
Поле зрения делится на несколько последовательно просматриваемых зон и определяется
освещенность каждой зоны. Зона с наибольшей освещенностью определяется как место
нахождения объекта манипулирования. На нее наводится камера для дальнейшего
обследования. Подстройкой чувствительности камеры обеспечивается адаптация
изображения по яркости.
• Факторами, влияющими на точность зрительной системы, являются: дискретизация
изображения, геометрические искажения камеры, выбор порога бинаризации,
калибровка, погрешности алгоритмов обработки. Для уменьшения геометрических
искажений оптическая ось должна быть перпендикулярна рабочей плоскости.
• Для работы СТЗ согласуются системы координат камеры, робота и рабочей сцены. Это
выполняется при калибровке системы. Вначале производится калибровка СТЗ и
определяются масштабы и направления координатных осей поля зрения; затем строится
координатная система камеры и «привязывается» к системе координат робота.
Преобразование координат»описывается в терминах переноса начала системы координат
и центра вращения системы. При калибровке используются позиционные датчики робота и
специальные программы
308.
Видеодатчики СТЗ.• Видеодатчики СТЗ являются первичными преобразователями электромагнитного излучения видимого
диапазона в электрические сигналы. Они состоят
из оптической системы, с помощью которой осуществляется проектирование,
преобразователя (чувствительного элемента),
систем сканирования, считывания и предварительного усиления.
• К основной аппаратуре СТЗ видеодатчики присоединяются при помощи специальных кабелей, способных с
малыми потерями передавать информацию последовательно и с большой частотой следования сигналов. Кроме
этого для передачи этих сигналов используется волоконная оптика.
• Чувствительные элементы видеодатчиков могут быть точечными, одномерными и двухмерными. В первом
случае чувствительный элемент воспринимает излучение от малой части объекта и для получения всего
изображения необходимо осуществлять сканирование элемента по плоскости изображения. При этом
изображение получается в виде растра (параллельного, спирального и т. п). Одномерные чувствительные
элементы представляют линейку точечных чувствительных элементов; в этом случае для получения
изображения необходимо использовать одномерное сканирование, т.е. перемещение элемента относительно
объекта в направлении перпендикулярном к его линейному размеру, либо перемещение объекта в том же
направлении. Двухмерные чувствительные элементы заменяют матрицу точечных элементов, расположенных с
определенной дискретностью, и не требуют сканирования.
• На чувствительный элемент изображение объекта проектируется при помощи оптической системы, которая
определяет размер, охватываемого видеодатчиком поля рабочей сцены. Оптическая система представляет
собою линзовый объектив, который диафрагмируется для регулирования светового потока от объекта и
фокусировки для улучшения четкости изображения.
• Основой видеодатчиков СТЗ являются преобразователи типа видикон, приборы с зарядовой связью и
полупроводниковые фотоприемники.
309. Режимы работы СТЗ.
Формирователи видеосигнала (ФВС) на приборах с зарядовой связью (ПЗС).• Формирователи видеосигнала, построенные на приборах с зарядовой связью – это
большие интегральные схемы, собранные на структурах металл – диэлектрик полупроводник (МДП) и (или) металл –окисел - полупроводник (МОП). В (МДП)
основные носители электроны, в (МОП) – дырки.
• В приборах с зарядовой связью (ПЗС) информацию о фотообразе представляет
пакет носителей зарядов, возникающих в полупроводниках под влиянием
электромагнитного излучения, хранящихся в потенциальных ямах, находящихся в
поверхностном слое полупроводника.
• Работа (ПЗС) в качестве приемника фотоизображения представляется тремя
режимами: а) восприятия (накопления); б) хранения; в) считывания.
1. В режиме восприятия изображения объекта световой поток преобразуется в
соответствующие ему зарядовые пакеты, при этом время преобразования задается
временем экспозиции мишени.
2. Фоторельеф, преобразованный в потенциальных ямах в рельеф зарядов , хранится
там пока не востребуется электрическими тактовыми импульсами (срок хранения
ограничен).
3. В режиме считывания информации тактовые импульсы заставляют переходить
зарядовые пакеты от одной структуры (элементов МОП) к другой по программе
работы регистров.
310. Видеодатчики СТЗ.
• Основным элементом ПЗС является МОП – емкость, образуемая металлическим электродом,расположенном на тонком слое диэлектрика (например, окисла кремния) и слоем кремния –
полупроводника, покрывающего его поверхность. Диэлектриком является пластинка из
двуокиси кремния толщиной ≈ 0.1мкм.
• Последовательное соединение элементов образует «цепочку», называемую сдвиговым
регистром.
• При последовательном соединении регистров образуется матричный формирователь
сигналов.
• Особенностью матриц из МОП по сравнению с другими датчиками являются
• прецезионная геометрия расположения элементов;
• отсутствие инерционности;
• высокая линейность фотоэлектрического преобразования;
• низкий уровень выходных шумов;
• малые размеры и масса элементов и матрицы;
• низкое электрическое напряжение и потребляемая энергия;
• высокая устойчивость по отношению к механическим, акустическим и электромагнитным
воздействиям;
• высокая надежность и долговечность.
• Основным их недостатком является потеря носителей заряда при их переносе и возникающее
вследствие этого искажение изображения.
• Для них возможна световая и электрическая инжекция неосновных носителей в ячейках.
• Световая инжекция в ПЗС на основе кремния осуществляется в спектральном интервале от
ультрафиолетового до верхнего инфракрасного, т. е. при длинах волн (400 – 1100) нм. при
энергии фотонов, достаточной для перехода носителей через запрещенную зону шириной 1.12 эВ.
311. Формирователи видеосигнала (ФВС) на приборах с зарядовой связью (ПЗС).
Образование зарядов.+U
• Схема ПЗС приведена на рис.1.
• Если к электроду приложить положительный
+
потенциал,
то основные носители кремния P-типа –
дырки – уйдут от поверхности вглубь элемента. Под
электродом образуется область обедненная
основными носителями.
• Величина этой области зависит от приложенного
напряжения U и свойств МОП – структуры:
удельного сопротивления кремния, толщины
диэлектрика, электрофизических свойств
диэлектрика и границы раздела диэлектрик –
кремний.
• Обедненная область будет тем глубже, чем выше
удельное сопротивление кремния (ρ) и тоньше
слой диэлектрика..
• Неосновные носители (электроны) будут
притягиваться к электроду и существуют в этой
области не рекомбинируя. Это иллюстрируется на
рис. 1 (б).
металл
окисел
- - -
-
+
+
+
Кремний Р - типа
а)
Энергия
неос.носителей
-
-
-- -
-
Потенциальная яма
б)
Рис. 1
Расстояние
312.
Образование и хранение зарядов.+UЭ
а)
+UЭ
Q
Рис. 2.
б)
• Одна из основных характеристик МОП – емкости –
поверхностный потенциал, т. е. величина, на которую
изменяются границы зон на поверхности кремний –
окисел по сравнению с их положением в объеме.
Видно(на Рис.2, что значение поверхностного потенциала
вне проекции электрода и под ней различны: под
электродом образуется «потенциальная яма», в которую
неосновным носителям выгодно скатываться.
• По мере того как неосновные носители собираются в
«потенциальной яме» диаграммы МОП – структур
изменяются.
• На рис. 2 (а) показана энергетическая диаграмма в
момент времени, когда только подано напряжение
+UЭ : потенциальная яма образовалась, но еще не
заполнена неосновными носителями.
• На рис. 2 (б) показано заполнение потенциальной
ямы неосновными носителями; ее поверхностный
потенциал φП при этом уменьшается и в конце процесса
становится почти таким же как и вне электрода
(гидродинамическая аналогия – заполнение ямы водой).
313. Образование зарядов.
U1Перенос заряда в соседних МОП - емкостях.
U2
Q
t0
а)
U1
U2
t1
U1
U2
б)
t2
U1= 0
U2
в)
t3
г)
Рис. 3.
Рассмотрим две расположенные рядом МОП – емкости. К левой
емкости приложим напряжение +U1 ≈(10 – 15)В. Рис.3 (а).
В потенциальной яме против нее к моменту t = t0 накопится
заряд неосновных носителей Q. Под правым электродом заряда не
будет .
При t = t1 переключим потенциал: подадим на правую емкость
U2≈ U1. Тогда под ней образуется пустая потенциальная яма, готовая к
приему заряда из под левого электрода. Рис. 3 (б).
Если уменьшать потенциал левого электрода, то заряд Q будет
перетекать из потенциальной ямы под левым электродом в
образовавшуюся яму под правым электродом. Для момента t = t2 это
показано на рис 3 (в)
Процесс перетекания заряда закончится в t = t3.
Таким образом решается практическая задача перемещения
вполне определенного электрического заряда между двумя
соседними МОП – емкостями.
Если расстояние между рассматриваемыми двумя соседними
емкостями сделать достаточно большим, то при уменьшении глубины
левой заполненной ямы заряды из нее будут вытекать во все стороны.
В подготовленную под правой емкостью потенциальную яму
соберется лишь часть носителей, да и то с запозданием.
Рассмотрим задачу о работе цепочки сформированной из
линейки МОП - емкостей.
314. Образование и хранение зарядов.
Перенос заряда в цепочке МОП – емкостей.• Рассматривается цепочка, создаваемая
из МОП – емкостей, называемая сдвиговым
регистром, представленная на рис 4.
• Каждый элемент регистра образован 3 –
мя электродами; одноименные электроды
всех элементов соединены шинами, образуя
3–х фазную электродную систему. Три
электрода в элементе регистра нужны для
того , чтобы обеспечить направленный
перенос зарядовых пакетов.
• Для более удобного объяснения работы
регистров ниже рассматривается более
простая 2 – х фазная система (рис. 5).
• Рис. 5 (а) представляет состояние, когда к
1 – ой фазе приложен высокий
положительный потенциал и под всеми
электродами этой фазы накоплены заряды.
• Если этот потенциал переключить с
первой фазы на вторую, то потенциальные
ямы под электродами 1 – ой фазы
«схлопнутся», а под 2 – ой начнут
заполняться. Заряды из под электродов 1 –
ой фазы будут равномерно перетекать в обе
стороны, так как слева и справа существуют
пустые потенциальные ямы рис. 5 (б) ).
1
2
3
Рис. 4
2
1
а)
2
1
Рис. 5
б)
315. Перенос заряда в соседних МОП - емкостях.
Перенос заряда в цепочке МОП – емкостей.• Чтобы избежать перенесения заряда из
потенциальной ямы во все стороны, можно
использовать 3 – ий электрод, т. е. сделать элемент
регистра несимметричным.
• Если в такой системе подать потенциал на 2 – ую
фазу, то при t = t0 в ямах под соответствующими
электродами накопятся заряды.
• Если снять потенциал со 2 –ой фазы и подать на 1 –
ю, то под электродами этой фазы образуются
потенциальные ямы, в которые будут перетекать ранее
накопленные заряды.
• Если снять потенциал с 1 –ой фазы и подать на 3 – ю,
то заряды будут перетекать под электроды,
расположенные справа.
• Так последовательно при переключении фаз заряды
будут передвигаться слева направо. Направленность
переноса зарядов обеспечивается стоп – каналами, т. е.
областями лигированными примесями сильнее, чем
кремний в канале переноса.
• Чем выше лигирование, тем меньше потенциальная
яма.
1
2
3
t0
1
2
3
t1
1
2
3
t2
Рис. 6
316. Перенос заряда в цепочке МОП – емкостей.
Источники зарядов.Выше были рассмотрены процессы накопления и переноса электрических зарядов,
без определения источника появления неосновных носителей.
Первым таким источником является термогенерация. В кремнии при заданной
температуре отличной от нуля всегда генерируются пары электрон – дырка.
Под электродами регистров, находящимися под напряжением, эти пары
разделяются: основные носители «отгоняются », неосновные накапливаются в
образовавшейся потенциальной яме.
Скорость накапливания определяется скоростью генерации пар, то есть
температурой, качеством кристалла кремния и свойствами поверхности раздела
кремний – диэлектрик. Чем выше температура и чем больше дефектов в кристалле
кремния или на границе раздела, тем быстрее заполняются потенциальные ямы.
Под электродом собираются носители, рожденные в самой обедненной области и на
расстоянии диффузной длины от нее.
Накопление в потенциальных ямах термогенерированных носителей является
паразитным процессом, так как появляющийся таким образом заряд, не имеет никакой
инфраструктуры ( исключая данные о качестве кремния и перехода) Направленное
введение неосновных носителей в ПЗС осуществляется электрической инжекцией или
воздействием светового потока.
317. Перенос заряда в цепочке МОП – емкостей.
• Для электрической инжекции используется Р – П переход, смещенный в прямомнаправлении.
Эмитированные Р – П переходом неосновные носители собираются в потенциальной
яме.
• Накапливаемый в потенциальной яме заряд пропорционален току (смещенного) Р – П
перехода и времени инжекции. Он содержит и переносит информацию об этом. На
основании этого в запоминающих устройствах ПЗС вводятся электрические символы 0 и1
• Световая инжекция неосновных носителей происходит при попадании в кремний
фотонов с энергией, достаточной для переброски носителей через запрещенную зону ,
ширина которой 1.12 эв. .
• Следовательно, при облучении элементов ПЗС световым потоком со спектром от
ультрафиолета до ближнего инфракрасного (длина волны ≈1.1мкм) фотоны будут
порождать пары электрон – дырка.
• Последние в обедненной области разделяются и неосновные носители накапливаются в
потенциальной яме.
• Накопленный заряд пропорционален количеству фотонов и времени освещения. При
фиксированном времени освещения зарядовый пакет несет информацию об освещенности
поверхности вблизи рассматриваемого электрода.\
• На рис. 7. представлена схема простейшего формирователя видеосигнала (ФВС) –
трехфазный сдвиговый регистр.
318. Источники зарядов.
Простейший формирователь видеоимпульсов.1
2
3
4
а)
б)
в)
1
2
3
Г)
2
1
3
4
5
6
Движение луча
Телеэкран
4
3
2
1
Рис. 7. Трехфазный сдвиговой регистр. а) – тестовый объект; б) – оптическая система;
в) – фазовые шины; г) – электрод.
319.
• Оптической системой на поверхность регистра проектируется тест – объект в видеполей разной оптической плотности: непрозрачных ( 1, 4), прозрачного (2), серого (3).
• Накапливание электрических зарядов генерированных излучением этих полей
происходит под электродами 2 ой фазы, находящимися под достаточно высоким
положительным потенциалом.
• За время накапливания в потенциальных ямах появятся электрические заряды
величина которых пропорциональна распределению освещенности, создаваемой на
поверхности формирователя:
• В элементе 3, на который спроектировано прозрачное поле, заряд будет достаточно
велик;
В элементе 2, на который действует серое поле, он будет меньше,
• В элементах 1 и 4 будут накоплены только термогенерированные носители. Эти
носители присутствуют во всех ямах и создают паразитную добавку (погрешность) к
информационному заряду, создаваемому световым полем тест – объекта.
• Эти паразитные заряды порождают темновой ток, значение которого определяется
как отношение термогенерированного заряда носителей к информационному заряду.
• После накопления зарядов под электродами 2 – ой фазы потенциал фаз
переключается так, чтобы зарядовые пакеты смещались к выходу регистра, где они
преобразуются в импульсы напряжения или тока.
Эти сигналы усиливаются и подаются в видеоконтрольное устройство.(ВКУ).
320. Простейший формирователь видеоимпульсов.
Формирователи видеосигналов.• Движение луча в кинескопе ВКУ синхронизовано с движением пакетов зарядов в ПЗС, то есть тактовые
циклограммы составлены так, чтобы за время прочерчивания лучом одной строки все элементы регистра
очистились от зарядов. Тогда на строке экрана появятся точки, число которых равно числу элементов регистра, а
яркость пропорциональна заряду соответствующего элемента ( или амплитуде видеосигнала на выходе ПЗС). В
рассматриваемом случае на экране появится изображение тест – объекта.
• Рассмотренный светочувствительный сдвиговый регистр формирует одномерное изображение, то есть
обеспечивает накопление, а затем перенесение соответствующих зарядов вдоль регистра.
• Чтобы сформировать двумерное изображение нужно по второй оси, перпендикулярной направлению переноса
создание механического перемещения: сдвинуть изображаемый объект перпендикулярно регистру или сдвинуть
регистр относительно изображения. В любом из этих случаев регистр будет построчно считывать изображение.
При этом скорость движения луча на ВКУ должна быть синхронизована со скоростью выведения зарядовых
пакетов из регистра, а скорость смены кадров – со скоростью механического движения.
• Такие линейные формирователи видеосигналов применяются там где есть механическое сканирование
(перфолента на борту самолета). Двухмерное изображение с помощью ПЗС можно создать, используя набор
линейных формирователей, создавая из них матричный формирователь.
• Простейший матричный формирователь видеосигналов (ФВС) , содержащий 10 линейных
светочувствительных регистров по 10 элементов показан на рисунке .
• Каждый светочувствительный регистр соединен с элементом сдвигового регистра, служащего для вывода
зарядовых пакетов из матрицы. Сдвиговый выходной регистр не является светочувствительным и выполняет
только функции переноса.
• Изображение объекта проектируется оптической системой на поверхность матрицы ПЗС при закрытом
выходном регистре.
321.
Элементы регистров1 2
3 4
5
6 7
1
8 9 10
1
3
4
Светочувствительные регистры
3
Формирователи видеосигналов.
• После накопления в ямах элементов
светочувствительных регистров зарядов их
пакеты одновременно во всех регистрах
переносятся вправо.
• После одного такта крайние правые
зарядовые пакеты перетекут в ямы выходного
сдвигового регистра (под электроды 2 – ой
фазы).
• Приняв заряды выходной регистр начинает
переносить их на выход до тех пор пока
полностью не очистится.
• После этого происходит следующий такт
переноса зарядов из светочувствительных
регистров в выходные и цикл их переноса на
выход.
Процессы повторяются пока не очистятся все
светочувствительные регистры и матрица ПЗС
будет готова к приему нового пакета
накопления.
• Размер электродов в матрице ПЗС (10 -15)
мкм; промежутков (2 -4) мкм; слой
диэлектрика 0.1 мкм; тактовые импульсы
напряжения (10 – 20) в.; макс. время хранения
зарядов 100 мкс
2
5
6
7
8
9
10
1
2
3
2
Выходное
устройство
322.
Основные характеристики матриц ПЗСПараметр
Тип матрицы
СПЗС -1М
ФПЗС -2м
Число строк
576
288
Число столбцов
512
256
Область максимальной спектральной
чувствительности
700-800
700-800
Чувствительность по напряжению мВ/лк
20
Выходной сигнал мВ.
100
120
Освещенность лк
2
2
Напряжение питания В
20
20
Габаритные размеры мм3.
36*47*3.7
19.5*16*3
Характеристики матриц
ПЗС, работавших при
вибрации в диапазоне
частот 1 -3000 Гц с
максимальным ускорением
20 м/с2 и акустических
шумах в диапазоне 50 –
10000 Гц при максимальном
уровне звукового давления
160 дб.
Матрицы сохраняют
работоспособность после
многократных ударов с
максимальным ускорением
500 м/с2 и линейных
центробежных) нагрузок с
ускорением 200 м/с2.
323.
Видикон.Видикон – это распространенный вид передающей телевизионной трубки, электроннолучевой преобразователь
с накоплением заряда.
• В видиконе преобразование световой энергии в
4
5
электрический сигнал производится за счет
3
7
6
2
использования внутреннего фотоэффекта.
8
• Изображение объекта проектируется на плоскую
мишень, состоящую из плоской сигнальной пластины 1
и фотопроводящего слоя 2. Мишень сканируется
электронным лучом, образующемся в прожекторе 8 и
формируемым и управляемым с помощью
фокусирующей 4, отклоняющей 5 и корректирующей 7
9
1
катушек, фокусирующего электрода 6 и управляющей
сетки 3.
Рис.47 , Схема видикона. 1- Сигнальная пластина; 2 –
фотопроводящий слой; 3 – Управляющая сетка; 4 – фокусирующая
катушка; 5 – Отклоняющая катушка; 6 – Фокусирующий
электрод; 7 – Корректирующая катушка; 8 – Прржектор; 9 –
Баллон.
Электронный пучок
П
ФС
СП
R
Рис 48 . Схема элемента мишени. СП - Сигнальная
пластина; П – поверхность элемента.
Фотопроводящий слой – это тонкий слой
фотосопротивления на прозрачной проводящей
сигнальной пластине, находящейся под напряжением
(30 – 80) в относительно электронного прожектора.
Эквивалентная схема элемента мишени
может быть представлена как параллельное
соединение емкости С и светозависимого
сопротивления R между облучаемой
электронным пучком поверхностью
элемента и сигнальной пластиной (Рис.48).
324.
Вблизи фотомишени поток электронов тормозится сеткой (6), имеющей потенциал близкий потенциалу прожектора.
Если затвор объектива закрыт (фотомишень находится в темноте) и электронный луч построчно последовательно
пробегает фотомишень, то обращенная к прожектору сторона фотосопротивления заряжается до некоторого
потенциала близкого к потенциалу прожектора. Так как сигнальная пластина имеет потенциал (30 – 80)в.относительно
прожектора, то между противоположными поверхностями фотосопротивления возникает разность потенциалов.
Эквивалентную схему мишени можно рассматривать как сумму большого числа элементарных конденсаторов, у
которых нижние пластины соединены сигнальной пластиной, а верхние – разомкнуты. В темноте конденсаторы будут
медленно разряжаться через фотосопротивление.
Если открыть затвор объектива , то сопротивление участков мишени окажется обратно пропорционально их
освещенности. Распределение сопротивления по мишени будет повторять освещенность поверхности объекта, т. е.
соответствовать изображению объекта в черно – белых тонах. Пока затвор открыт и рельеф сопротивлений существует
конденсаторы быстрее разряжаются на более освещенных участках, т.е. на фотомишени остаются заряды
пропорциональные их освещенности.
Если затвор закрыть, то рельеф потенциалов на верхней стороне мишени, повторяющий рельеф сопротивлений будет
существовать долго, так как при закрытом затворе сопротивление на всех участках восстанавливается до его «теневого
значения» и разряд конденсаторов замедляется.
Изображение сохраняется пока электронный луч от прожектора не восстановит потенциал мишени.
Электрический ток, который протекает при восстановлении потенциала от сигнальной мишени, представляет на вход
усилителя видеосигнал, являющийся электрическим аналогом изображения об\екта. Таким образом существует
возможность делать процессы изображения объекта на мишени и его считывания разнесенными во времени: быстрое
формирование изображения и медленное его считывание. Так осуществляется оперативная память в видиконе.
Нормальная освещенность для видикона (10 – 100)лк., спектральная чувствительность (300 – 800)нм.; разрешающая
способность 6000 лин/мм.; площадь мишени 10*13 мм 2.
325. Видикон.
Фотоэлектрические видеодатчики.
• В качестве датчиков оптических систем СТЗ используются фотодетекторы: Фотонные и (или)
фотоэлектрические, преобразующие энергию инфракрасного или оптического излучения в
электрическую. В основном используются фотодетекторы с внутренним фотоэффектом: фотодиоды,
фототриоды, фоторезисторы, лавинопролетные фотодиоды (ЛФД) и др
• В качестве материала для изготовления фотодетекторов используются полупроводники,
обладающие фотопроводимостью, т. е. изменяющие свою электропроводность при действии на них
электромагнитного излучения. Фотопроводимость, обусловленная внутренним фотоэффектом
происходит вследствие оптического возбуждения носителей зарядов из связанных состояний в
свободные и соответственного увеличения концентрации электронов в зоне проводимости или дырок в
валентной зоне.
• Если на полупроводник, включенный в электрическую цепь, подается лучистый поток, то резко
повышается его проводимость и в местах нарушения кристаллической структуры могут освобождаться
электроны, которые под действием приложенного напряжения электрического поля перемещаются к
положительному электроду, образуя первичный электронный ток.
• Возникающая под действием лучистого потока добавочная проводимость является
фотопроводимостью, обусловленной внутренним фотоэффектом. Все полупроводники
фоточувствительны. Однако у большинства полупроводниковых материалов этот эффект мал и они не
могут быть использованы в практических приложениях.
• Те полупроводники, которые обладают достаточно большим внутренним фотоэффектом,
используются для производства фотосопротивлений. Они изготавливаются из соответствующих
монокристаллов с лигирующими добавками и бывают селеновыми, сернисто – таллиевыми, сернисто –
висмутовыми, сернисто – свицовыми, сернисто – цинковыми, кремниевыми, германиевыми и др.
• На их базе строятся отдельные преобразователи и дискретные матричные преобразователи.
326.
Информационно-измерительная система ПР.• Информационно-измерительную систему можно представить в виде из двух основных частей:
системы технического зрения (СТЗ),
системы обобщения сенсорной информации.
СТЗ состаит из блоков:
«Ввод видеоизображения», «Предварительной обработки», «Обнаружения образов», «Обнаружения
препятствий», «Визуальной обратной связи».
В состав системы обобщения сенсорной информации входят:
блок «Кинематическая и динамическая модель робота», «Блок сравнения», «Блок формирования
целевой точки» и «Блок формирования карты местности».
•Система технического зрения.
• Блок «Ввод видеоизображения» воспринимает информацию, представляемую видеодатчиками.
• При ограниченных вычислительных ресурсах необходимо,
во-первых, выбрать минимальный допустимый размер видеоизображения в пикселях,
во-вторых, для его хранения в памяти организовать структуру данных так, чтобы она обеспечивала
максимально быстрый доступ к пикселям.
(ГОСТ 27459-87 под термином «пиксель» понимает «наименьший элемент поверхности визуализации, которому может
быть независимым образом заданы цвет, интенсивность и другие характеристики изображения.)
• Так как видеоизображение, представляемое видеодатчиком, содержит цифровые и аналоговые шумы и
может быть искажено вследствие аберрации объектива видеодатчика, то для устранения аберрации и шумов
целесообразно использовать специальное алгоритмическое обеспечение, которое реализуется в блоке
«Предварительной обработки ».
В процессе предварительной подготовки видеоизображение преобразуется из цветного в черно-белое,
производятся его фильтрация и цифровая коррекция аберрации объектива. Решение этих задач проводится в
реальном времени.
327. Фотоэлектрические видеодатчики.
После предварительной обработки видеоизображение анализируется в трех независимых блоках:«Обнаружение препятствий», «Визуальная обратная связь» и «Распознавание образов».
В блоке «Обнаружение препятствий», решается задача обнаружения и определения удаленности
препятствий в боковой зоне. На выходе блока формируется локальная карта видимой зоны сцены.
Эти данные передаются в «Блок формирования карты местности », где дополняются данными о
расположении препятствий в невидимой зоне..
Блок «Визуальная обратная связь» решает задачу восстановления параметров движения
наблюдателя, которые используются для формирования данных о параметрах движения .
Блок «Распознавание образов». обнаруживает на видеоизображении определенные объекты среды,
распознает их и решает задачу слежения за заданным объектом. При решении этой блок формирует
координаты объекта на рабочей сцене.
Алгоритмы распознавания образов, для задач управления интеллектуальным роботом
разрабатываются с учетом следующих условий.
Во-первых, для повышения быстродействия данных алгоритмов нет необходимости на каждом
такте расчета производить процедуру распознавания всех образов, находящихся на
видеоизображении. Достаточно реализовать процесс распознавания одного образа, заданного какимлибо идентификатором (например, числовым).
Во-вторых, задача распознавания образов может подразделяться на две подзадачи:
определение числа экземпляров заданного образа на видеоизображении.
слежение за одним из экземпляров заданного образа.
В третьих, необходимо организовать процесс обучения новым образам и корректировки данных об
уже обученных образах.
При решении этих задач блок «Распознавание образов" взаимодействует с системой управления
поведением робота, которая не только получает информацию об обнаруженных объектах, но и с
помощью специальных команд задает различные режимы его работы (например, задает
идентификатор образа для слежения). Поэтому, кроме задачи распознавания, необходимо решать
обозначенный спектр смежных задач.
328.
Система обобщения сенсорной информацииБлок «Кинематическая и динамическая модель робота» моделирует динамические процессы,
проходящие в исполнительных элементах робота, и формирует на выходе параметры его
эталонной модели.
«Блок сравнения» сравнивает параметры движения робота, получаемые от блока
«Визуальная обратная связь», с параметрами эталонной модели. По результатам этого сравнения
блок выбирает и формирует на своем выходе наиболее достоверную информацию, которая
используется соответствующими подсистемами.
«Блок формирования карты местности» решает задачу формирования цифровой карты
местности на основе данных о расположении препятствий в видимой зоне. Для решения этой
задачи необходима информация о параметрах движения робота. При реализации этих
алгоритмов для интеллектуального мобильного мини-робота важно обеспечить их
быстродействие.
На выходе данного блока формируются данные о локальной карте местности, которые
используется системой управления движением ИМР. Кроме того, текущую локальную карту
местности целесообразно отображать на панели управления роботом.
«Блок формирования целевой точки» решает задачу слежения за координатами целевой точки в
системе координат робота. Целевая точка определяет те целевые координаты, в которые
необходимо прибыть мобильному роботу. Для решения этой задачи используются данные о
параметрах движения робота.
Текущая целевая точка может быть назначена двумя способами: оператором или системой
управления поведением робота.
329.
Основные требования к СТЗ.L
• Выполнение основных функций в реальном времени, т.е. со скоростью течения
технологического процесса, без задержек и простоев, и , как следствие, сокращение обрабатываемой
информации - главное, хотя и противоречивое требование к СТЗ. Сокращение объема
обрабатываемой информации осуществляется следующими средствами:
1.
Сжатием обрабатываемой информации на входе аппаратными средствами;
2.
Выбором простых признаков идентификации;
3. Разработкой и применением быстродействующих алгоритмов с распараллеливанием
вычислений и операций, применением многопроцессорных сетей, построением
специализированных многопроцессорных вычислителей.
Сокращение объема обрабатываемой информации осуществляется следующими способами:
1. Заменой значения яркости в некоторой точке изображения функцией яркости в пределах окна
из n элементов, центр которой совпадает с этой точкой,
2. Уменьшением до 2 – х числа уровней квантования видеосигнала в системах, осуществляющих
выделение объектов в поле зрения датчика и определение их геометрических характеристик;
3. Использование режима слежения за выделенным объемом, применением режима
целенаправленного управления процессом ввода изображения в зависимости от текущих
результатов обработки и анализа;
4. Переходом от кодирования сигналов для всех элементов изображения к кодированию длин
отрезков или длин серий построчно, развертки изображений и т. п. .
330.
Основные фотометрические величины.Световой поток Ф – мощность лучистой энергии, оцениваемая по световому ощущению,
которое она производит. Единица измерения ЛЮМЕН (лм). Его значение определяется
экспериментальнос помощью эталонных излучателей .Лампочка мощностью 25 вт дает световой
поток ≈ 300 лм. Монохроматическому потоку с длиной волны 0.555 мкм , мощностью 1 вт
соответствует световой поток в 683 лм
2.
Сила света I – отношение светового потока к телесному углу Ω , в котором он исходит
1.
Основная единица: кандела (кд)– сила света , излучаемогоdФ
черным телом, перпендикулярно
I
поверхности площадью 1/60 см2 при температуре 2042,5
К.
d
Сила света зависит от направления. Эта зависимость характеризуется диаграммой
направленности.
Если известна сила света излучателя, то его световой поток Ф = I Ω.
3.
Яркость B – это отношение сила света к площади светящейся поверхности
B = I / S.
Единица яркости (кд/м2) или стильб (кд / см2 ). В случае наклонной или искривленной излучающей
поверхности, вместо ее площади S используется «кажущаяся» площадь, равная ее проекции на
плоскость перпендикулярную направлению распространения излучения.
4. Освещенность Е – отношение светового потока к площади освещаемой поверхности
Е = dФ / dS.
Единица измерения люкс (лк)= лм /м2.